Capitolo 1 – Cenni Introduttivi
I.0 Obiettivi e metodi del corso
L’obiettivo del corso di Idrodinamica consiste nel presentare e trasmettere le nozioni fondamentali
riguardanti la dinamica dei fluidi. Particolare attenzione sarà posta agli aspetti legati al calcolo delle
forze scambiate tra fluidi e strutture e degli scambi energetici tra fluidi e macchine.
I metodi con i quali si potrà conseguire l’obiettivo posto saranno fondamentalmente i metodi
dell’algebra, della trigonometria, del calcolo vettoriale e infinitesimale. Per affrontare in modo
proficuo lo studio dell’Idrodinamica, anche da un punto di vista fondamentale, è necessario
conoscere e saper effettuare le operazioni fondamentali nell’ambito dell’algebra e della
trigonometria, del calcolo vettoriale, differenziale e integrale.
I.1 Definizione di fluido
Un corpo costituito da fluido (ad esempio una certa quantità d’acqua o di gas) non possiede una
forma propria ma assume la forma del contenitore in cui è posto: fatto questo, che potrebbe essere
preso come definizione di fluido. Se il contenitore viene meno per qualsiasi motivo (un bicchiere
d’acqua che si rovescia, un palloncino che si sgonfia) il corpo fluido perde irreversibilmente la
forma che aveva assunto, deformandosi in maniera estremamente significativa.
Si può osservare che i corpi fluidi, costituiti da fluidi con cui si ha ordinariamente a che fare: acqua,
olii, aria, gas, non sono in grado di resistere a forze, anche molto modeste, che tendano a porre parti
di essi in movimento relativo rispetto ad altre, causando deformazioni di rilevante entità. In pratica
è esattamente il contrario di quanto accade in un corpo solido, in cui vi è una proporzionalità tra le
forze applicate e le deformazioni che ne conseguono.
Tutto ciò ricade quotidianamente sotto la nostra attenzione ed è la conseguenza macroscopica della
natura dei legami intermolecolari esistenti nel corpo fluido: legami tali da permettere alle molecole
moti relativi di maggiore ampiezza rispetto a quelli caratteristici dei corpi solidi. In particolare i
corpi liquidi sono caratterizzati da legami intermolecolari di intensità intermedia rispetto ai solidi e
ai gas e pur non possedendo forma propria, sono caratterizzati da un volume che resta costante in un
ampio campo di valori della pressione, sono cioè incomprimibili e se posti in un recipiente aperto
tendono a riempirlo fino ad un certo livello, delimitato da una superficie di separazione detta anche
superficie libera (ad esempio una massa d’acqua contenuta in un secchio). I corpi gassosi sono
invece caratterizzati da legami intermolecolari più tenui rispetto a quelli caratteristici dei corpi
liquidi, di conseguenza i moti relativi delle molecole gassose sono di maggiore entità rispetto a
quelli che si hanno nei liquidi: a livello macroscopico tale fatto si riscontra nella tendenza dei gas ad
occupare tutto lo spazio a loro disposizione. Inoltre, se una certa quantità di gas viene inserita in un
recipiente a volume variabile (ad esempio un cilindro con pistone) è possibile, esercitando una certa
forza, modificare sensibilmente il volume occupato dal gas: quest’ultimo è cioè comprimibile.
L’Idrodinamica è la disciplina che studia il comportamento dinamico dei fluidi incomprimibili. I
fluidi incomprimibili sono tutti i liquidi, ma anche i gas in determinate condizioni: ad esempio l’aria
nei moti caratterizzati da velocità notevolmente inferiori a quelle del suono si comporta come un
fluido incomprimibile.
I.2 Lo schema del continuo
Un corpo fluido, ossia un corpo costituito da una certa quantità di fluido, si presenta
all’osservazione sperimentale come un continuo ossia come qualcosa che può essere suddiviso in
parti sempre più piccole, pur conservando tali parti le caratteristiche del corpo grande da cui
derivano, senza lacune o singolarità. In altre parole, osservando una massa d’acqua, si può pensare
di prenderne porzioni via via più piccole che conserveranno le caratteristiche fisiche dell’acqua. In
realtà quando il processo di partizione arriva a considerare porzioni di acqua di dimensioni
molecolari si riscontrano dei vuoti ossia delle zone intermolecolari in cui l’idea di definire le
caratteristiche fisiche dell’acqua perde di significato. Dunque lo schema interpretativo del continuo
ha significato quando il corpo fluido in studio è di dimensioni molto maggiori di quelle
caratteristiche delle molecole che lo compongono. Nelle ordinarie applicazioni tecniche ciò si
verifica sempre: basti pensare ad esempio che una sfera di raggio pari a 0.001 m contiene un
numero di molecole d’acqua circa pari a 1021. La molecola d’acqua può infatti essere assimilata in
prima approssimazione ad una sferetta di raggio pari a 0.9584 × 10−10 m . Il rapporto tra il volume
della sferetta avente raggio pari a 0.001 m e la sferetta avente raggio pari alla dimensione della
molecola d’acqua è esattamente pari a: 1.13595×1021. Dunque una dimensione lineare pari a 0.001
m risulta già molto maggiore di quella caratteristica di una molecola d’acqua e
contemporaneamente pienamente accettabile come dimensione caratteristica di un volume di misura
sperimentale. Lo schema interpretativo del continuo implica che le proprietà fisiche del fluido, così
come le grandezze caratterizzanti il moto (massa, forze, velocità, variabili di stato termodinamico),
siano distribuite per l’appunto con continuità in tutto il corpo fluido considerato: immaginando cioè
che il corpo fluido in moto occupi una regione dello spazio tridimensionale, le proprietà fisiche di
tale corpo e le grandezze caratterizzanti il moto saranno funzioni continue del punto, al variare di
quest’ultimo all’interno della regione spaziale occupata dal corpo fluido, e del tempo. Il concetto di
continuità delle proprietà fisiche e delle grandezze caratterizzanti il moto viene espresso, dal punto
di vista matematico, descrivendo tali grandezze tramite funzioni continue del punto appartenente
alla regione spaziale occupata dal corpo fluido e degli istanti di tempo appartenenti all’intervallo
durante il quale viene osservato il corpo fluido:
f = f ( x, y , z , t )
(1)
I.3 Descrizione del moto di un corpo fluido
In linea di principio la descrizione del moto di un corpo fluido non differisce da quella dei corpi
solidi (elementi materiali, sistemi di elementi, corpi rigidi): in altre parole, identificando ogni punto
occupato inizialmente dal corpo fluido con un punto materiale libero di muoversi, costituito sempre
dalla stessa porzione di fluido, si potrebbero ottenere, assegnate le condizioni iniziali e risolvendo le
equazioni del moto, le traiettorie, ossia il luogo geometrico delle posizioni occupate dai punti
appartenenti al corpo fluido al passare del tempo:
x = X ( x0 , y0 , z0 ,t )
y = Y (x0 , y0 , z0 ,t )
z = Z ( x , y , z ,t )
0
0
0
(2)
Y
y
y0
x0
x
Figura 1. Traiettorie di punti appartenenti al corpo fluido.
2
X
Secondo le (2), il punto che all’istante iniziale t = t 0 occupa la posizione x = x0 , y = y 0 , z = z 0 ,
all’istante t occuperà la posizione data dalle funzioni X,Y,Z. In figura (1) sono rappresentate le
traiettorie di alcuni punti appartenenti al corpo fluido. Tali traiettorie sono da vedersi come il luogo
geometrico delle posizioni occupate dai punti considerati al passare del tempo, a partire dalle
rispettive posizioni iniziali. E’ stata adottata una rappresentazione bidimensionale per semplificare
il disegno ed è stato messo in evidenza il fatto che il corpo fluido si deforma durante il moto.
La (2) è anche nota come rappresentazione parametrica della traiettoria ed è il risultato della
descrizione lagrangiana del moto. Le variabili x0 , y 0 , z 0 , che definiscono la configurazione iniziale
del corpo fluido, prendono il nome di variabili lagrangiane. La descrizione lagrangiana operata
dalle (2) può anche essere vista come una trasformazione delle coordinate x0 , y 0 , z 0 , nelle
coordinate x,y,z descriventi la posizione attuale del corpo fluido. Tale trasformazione in generale
varia al variare del tempo: si dice pertanto che è una trasformazione ad un parametro, essendo il
tempo t il parametro in questione.
Nella descrizione lagrangiana, la generica proprietà fisica del corpo fluido o la grandezza
caratterizzante il moto dipenderà dalla configurazione iniziale del corpo fluido, tramite le variabili
lagrangiane, e dal tempo. Infatti, sostituendo nella funzione (1) le equazioni parametriche delle
traiettorie (2), si ottiene la descrizione lagrangiana della grandezza considerata:
f = f ( X ( x0 , y0 , z0 , t ), Y ( x0 , y0 , z0 , t ), Z (x0 , y0 , z0 , t ), t ) = f L (x0 , y0 , z0 , t )
(3)
La descrizione lagrangiana del moto è la più prossima a quella che si usa per i sistemi di elementi
materiali, ma non la più comoda e nemmeno la più intuitiva. Infatti spesso le traiettorie (2)
assumono forme complicate, dalle quali è difficoltoso, se non impossibile, risalire alle informazioni
di reale interesse tecnico. E’ inoltre opportuno sottolineare il fatto che nella quasi totalità dei casi la
determinazione delle traiettorie è un problema irrisolvibile analiticamente, a causa della complessità
delle equazioni del moto: non si riesce cioè a determinare la forma delle funzioni parametriche delle
traiettorie, le quali, nei casi in cui sia di interesse, vengono determinate con metodi approssimati.
Una descrizione del moto di un corpo fluido, più intuitiva e più comoda per molti aspetti, è la
descrizione euleriana. Quest’ultima nasce dall’idea di osservare cosa accada in una determinata
regione spaziale sede di un moto di un fluido. La descrizione euleriana avviene spontaneamente, ad
esempio, quando un osservatore fissa con lo sguardo una zona di un fiume e ne segue le vicende al
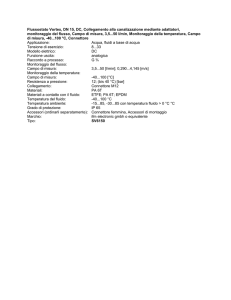
passare del tempo. In figura 3 viene rappresentato un esempio di descrizione sperimentale euleriana
del flusso attorno ad un profilo alare convenzionale (figura 2).
Figura 2. Il profilo alare convenzionale.
Tale descrizione sperimentale viene ottenuta investendo il profilo alare con una corrente stazionaria
(le cui caratteristiche non variano nel tempo), costituita da un certo numero di filetti fluidi ben
distinti, e riprendendo il fenomeno con una telecamera.
Nella descrizione euleriana tutte le proprietà fisiche del corpo fluido e le grandezze caratterizzanti il
moto del corpo fluido sono funzioni delle variabili spaziali e del tempo. La grandezza generica f
viene pertanto descritta dalla (1), in cui x,y,z sono le coordinate spaziali fisse del dominio in cui si
svolge il moto del fluido. Nell’ambito della descrizione euleriana, i moti in cui le grandezze non
dipendono esplicitamente dal tempo sono detti stazionari o permanenti, i moti in cui non vi è
dipendenza da una variabile spaziale si dicono uniformi rispetto a quella variabile.
3
Figura 3. Descrizione sperimentale euleriana del flusso attorno ad un profilo alare convenzionale.
I.4 Nozioni introduttive
I.4.1 Volume di controllo, volume materiale, elemento fluido.
La nozione di volume di controllo è intimamente connessa alla descrizione euleriana del moto di un
corpo fluido. Il volume di controllo è una regione spaziale fissa o animata da moto rigido, limitata
da superfici reali o virtuali, contenente fluido in quiete o in moto relativo rispetto ad essa. Il
fluido contenuto istantaneamente all’interno del volume di controllo costituisce un corpo fluido sul
quale si possono applicare agevolmente le leggi fondamentali di bilancio, come si vedrà più avanti.
Il volume materiale è invece il volume di un corpo fluido in movimento, volume variabile nel
tempo ma occupato sempre dal medesimo corpo fluido.
Un elemento fluido è un corpo fluido di dimensioni molto piccole rispetto alle dimensioni
caratteristiche del moto in esame, così da poter essere assimilato ad un punto materiale. L’elemento
fluido è un concetto comodo quando si voglia analizzare localmente il moto di un fluido.
I.4.2 Grandezze volumiche
In precedenza si è accennato al fatto che le proprietà fisiche del corpo fluido e le grandezze
caratterizzanti il moto, in virtù dell’ipotesi di mezzo continuo, possono essere considerate distribuite
con continuità sul volume occupato dal corpo (il volume materiale) e rappresentate per mezzo di
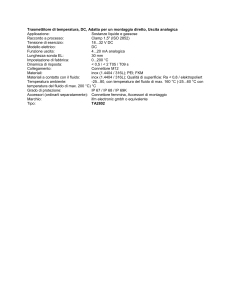
funzioni continue. Si consideri ad esempio la massa M di un corpo fluido: quest’ultima è distribuita
con continuità nel volume materiale. Si consideri ora una porzione ∆V di tale volume, che contenga
∆M
il punto P e cui sia associata la massa ∆M (figura 4). Il rapporto
è definito densità media del
∆V
corpo fluido nel volume ∆V.
4
z
dV, dM
∆V, ∆M
y
P
V, M
x
Figura 4. Rappresentazione del concetto di densità
Prendendo volumi ∆V sempre più piccoli, contenenti sempre il medesimo punto P, il rapporto
∆M
assume un valore praticamente costante fino al valore ∆V’, superato il quale inizia a presentare
∆V
delle oscillazioni (figura 5) dovute al fatto che la dimensione caratteristica del volume ∆V diviene
comparabile con la dimensione delle molecole componenti il fluido.
∆M
∆V
ρ
∆V’
∆V
Figura 5. Andamento caratteristico della densità del fluido.
Naturalmente, affinché valga l’ipotesi del continuo, dovremo limitarci a considerare volumi ∆V la
cui dimensione caratteristica sia maggiore di quella delle molecole componenti il fluido. In realtà,
viste le dimensioni delle molecole dei fluidi di più comune impiego, tale vincolo non costituisce una
∆M
e evidenziato in figura 5, per valori di
limitazione. Il valore costante raggiunto dal rapporto
∆V
∆V> ∆V’, è definito densità di massa o massa volumica del fluido nel punto P. La densità di massa
è anch’essa una funzione continua di punto. Per ottenere la massa relativa alla porzione infinitesima
di volume del corpo fluido si deve moltiplicare la densità per il volume di tale porzione:
5
dM = ρ ( x, y, z , t )dV
(4)
Nella formula (4) si è indicata la densità di massa con ρ e si è indicata la sua dipendenza dal punto e
dal tempo. dV rappresenta il volume della porzione infinitesima del volume del corpo fluido. dM è
la massa di tale volume o massa elementare della porzione considerata. Volendo conoscere la massa
totale del corpo si dovranno sommare tutte le masse elementari (4) delle porzioni di corpo
considerate ossia si dovrà calcolare l’integrale:
M = ∫ ρ ( x, y, z , t )dV
(5)
V
esteso al volume materiale occupato dal corpo fluido. Nell’Idrodinamica si incontreranno differenti
grandezze volumiche, come ad esempio la densità di quantità di moto, di momento della quantità
di moto, di energia cinetica, che integrate sul volume occupato dal corpo fluido danno
rispettivamente la quantità di moto, il momento della quantità di moto, l’energia cinetica del
corpo fluido.
I.4.3 Derivata rispetto al tempo di un volume materiale e teorema della
divergenza
Come si è detto in precedenza, un corpo formato da fluido occupa un volume – il volume materiale
- che evolve nel tempo: cambia forma, può aumentare, diminuire o restare costante. Risulta di
grande importanza valutare la variazione rispetto al tempo di un volume materiale. A tale scopo si
consideri una sfera di gas, di raggio R0, materialmente separata dall’ambiente che la circonda, a
pressione p0 (figura 6), e in equilibrio con questo.
z
y
p0
u
n
R0
x
Figura 6. Schema della variazione temporale di un volume materiale di forma sferica.
Si supponga ora di abbassare la pressione ambiente al valore p<p0. Poiché il gas è separato
materialmente dall’ambiente circostante (ad esempio tramite una membrana elastica), il volume
sferico iniziale tenderà ad espandersi ugualmente in tutte le direzioni, essendo ogni punto sulla
superficie animato da una velocità u avente direzione e verso radiali. La configurazione finale sarà
pertanto una sfera di raggio R (R>R0). Ipotizzando che il processo si svolga durante l’intervallo di
tempo ∆t è possibile calcolare l’incremento di volume a partire dall’incremento avuto dal raggio
della sfera durante il medesimo intervallo di tempo. Quest’ultimo infatti, detti n il versore normale
entrante nella sfera e –u·n la componente di velocità radiale, è pari a:
6
∆R = R0 - (u ⋅ n )∆t
(6)
Di conseguenza l’incremento di volume che si ha durante l’intervallo di tempo ∆t è pari a:
∆V =
[
4π
(R0 + ∆R )3 -R03
3
]
(7 )
Sostituendo l’espressione (6) dell’incremento del raggio nella espressione (7) si ottiene
l’espressione dell’incremento di volume in funzione della velocità di espansione della superficie e
dell’intervallo di tempo:
∆V =
[
4π
2
3
− 3R02 (u ⋅ n )∆t + 3R0 (u ⋅ n ) ∆t 2 − (u ⋅ n ) ∆t 3
3
]
(8)
La derivata temporale del volume materiale è pertanto data dall’espressione:
dV
∆V
= lim
= − (u ⋅ n ) × 4πR02
123
1
2
3
dt ∆t →0 ∆t Componente
radiale
della velocità
(9)
Superficie
della sfera
ossia dal prodotto della superficie della sfera per la componente di velocità in direzione radiale. Si
ricorda che il segno meno è dovuto alla scelta del verso entrante per la normale.
Il risultato espresso dalla (9) può essere generalizzato ad un volume materiale V di forma qualsiasi,
la superficie S del quale sia animata da una velocità u, non necessariamente uniforme, e sulla quale
sia definito il versore normale n, orientato verso l’interno del volume (figura 7).
y
u
V0
n
V
dSk
x
Figura 7. Volume materiale di forma generica.
In tal caso si dovrà immaginare che l’incremento di volume è il risultato della somma degli
incrementi infinitesimi:
∆Vk = -(u ⋅ n )∆td S k
7
(10)
definiti dal prodotto della porzione infinitesima di area superficiale dSk per la distanza percorsa in
direzione normale alla areola dSk durante l’intervallo di tempo ∆t: -(u ⋅ n )∆t . Di conseguenza il
contributo dato dall’incremento infinitesimo alla variazione temporale del volume materiale è pari
a:
∆Vk
= -(u ⋅ n )d S k
∆t
(11)
Considerando contributi sempre più numerosi e sommando tali contributi, si perviene al risultato
cercato:
lim ∑
k →∞
k
∆Vk dV
=
∆t
dt
(12)
ossia:
dV
= - ∫ (u ⋅ n )d S
dt
S
(13)
In altre parole la derivata temporale del volume materiale eguaglia il flusso netto di volume che si
ha attraverso la superficie S del volume, ossia la quantità di volume che attraversa la superficie S
nell’unità di tempo.
Alla formula (13) si può dare una veste alternativa calcolando il flusso netto elementare
− (u ⋅ n )d S attraverso le superfici di un generico volumetto elementare, di forma parallelepipeda, di
lati dx, dy, dz (figura 8).
z
y
ux+dx
dz
n=i
ux
n=-i
x
dy
dx
Figura 8. Il parallelepipedo elementare
Si consideri a tal fine che il parallelepipedo ha sei facce, aventi come versori normali i versori dei
tre assi coordinati. Le facce di superficie dydz hanno per versore normale il versore dell’asse x; le
facce di superficie dxdz hanno per versore normale il versore dell’asse y; le facce di superficie dxdy
hanno per versore normale il versore dell’asse z. Nel calcolare il flusso netto si dovrà tener conto
del contributo sulla faccia “d’ingresso” e di quello sulla faccia “d’uscita”. Ad esempio, sulla faccia
di superficie dydz si ha il contributo al flusso netto dato dalla componente di velocità u x e il
contributo al flusso netto dato dalla componente di velocità u x + dx . Nel valutare tali contributi si
dovrà tener conto del fatto che la normale alla faccia di superficie dydz cambia verso da x a x+dx,
8
per essere sempre entrante nel volume. Tenendo conto dei contributi delle altre facce, si ha
l’espressione del flusso netto di volume che attraversa la superficie del volume elementare:
[(
(
)
)
(
)
− (u ⋅ n )d S = − u x − u x + dx dydz + v y − v y + dy dxdz + w z − w z + dz dxdy
]
(14)
essendo u,v,w le componenti cartesiane di velocità. Espandendo in serie di Taylor di punto iniziale
x,y,z i valori delle componenti di velocità u x+dx , v y+dy , w z +dz e arrestando lo sviluppo al I ordine, si
ottiene il flusso attraverso la superficie del volumetto:
∂u ∂v ∂w
∂u ∂v ∂w
dxdydz = + +
dV
− (u ⋅ n )d S = + +
∂x ∂y ∂z
∂x ∂y ∂z
(15)
Dunque la (13) assume le forme alternative:
dV
dt = − ∫ (u ⋅ n )d S
S
dV = ∂u + ∂v + ∂w dV
dt V∫ ∂x ∂y ∂z
(16)
Dalle quali si deduce che:
∂u ∂v ∂w
∫ u ⋅ ndS = − ∫ ∂x + ∂y + ∂z dV (17 )
S
V
La formula (17) costituisce il risultato fondamentale del teorema della divergenza. Per inciso si noti
che la formula (17) può essere estesa a qualsiasi vettore u, di componenti cartesiani u, v, w, definito
all’interno di un volume V, racchiuso da una superficie chiusa S. Per divergenza di un vettore u,
avente componenti cartesiane u, v, w, si intende la somma delle derivate parziali delle componenti
del vettore, calcolate rispetto alle coordinate omologhe:
div(u ) =
∂u ∂v ∂w
+ +
∂x ∂y ∂z
(18)
La formula (17) può pertanto essere posta nella forma:
∫ u ⋅ ndS = − ∫ div(u )dV (19)
S
V
I.4.5 Gradiente di uno scalare, vettore nabla
E’ opportuno introdurre la nozione di gradiente di una funzione scalare. Siano i, j, k, i versori
degli assi cartesiani e f ( x , y , z ) una funzione scalare di punto. Il vettore:
grad( f ) =
∂f
∂f
∂f
i+
j+ k
∂z
∂x
∂y
9
(20)
è definito come gradiente di f. Direzione e verso del vettore gradiente indicano la direzione e il
verso di massima variazione della funzione f, mentre il modulo del vettore gradiente fornisce
l’intensità della variazione. Il vettore gradiente di f è diretto perpendicolarmente alle
superfici f ( x , y , z ) = cos t , dette superfici di livello della f.
Infatti si consideri la particolare funzione f ( x , y , z ) = cos t definita dalla: z − F (x, y ) = 0 (figura 9). Il
suo gradiente è dato dalla espressione:
grad( f ) = −
∂F
∂F
i−
j+k
∂x
∂y
(21)
D’altra parte, il vettore OP che unisce l’origine degli assi O con un punto P sulla superficie (figura
9) è definito dalla:
OP = xi + yj + F ( x, y )k
(22)
Il differenziale totale del vettore OP è un vettore tangente alla superficie:
∂F
∂F
k dx + j +
k dy
dOP = i +
∂y
∂x
(23)
Si vede quindi che il prodotto scalare dOP·grad(f) è nullo.
grad(f)
z=F(x,y)
z
P
dOP
y
F(x,y) k
OP
x i +y j
yj
x
xi
O
Figura 9. Rappresentazione geometrica del gradiente di una funzione scalare.
Definito il vettore nabla:
∇=
∂
∂
∂
i + j+ k
∂x ∂y
∂z
10
(24)
le cui componenti sono, nel riferimento cartesiano ortogonale, i simboli di derivata parziale rispetto
alle coordinate omologhe, è possibile definire il gradiente di una funzione scalare come il prodotto
simbolico del vettore nabla per lo scalare:
∇f =
∂f
∂f
∂f
i+
j+ k
∂x
∂y
∂z
(25)
Il vettore nabla può essere usato anche per definire in modo compatto la divergenza di un vettore v
come il prodotto scalare del nabla per il vettore v:
∇⋅v =
∂vx ∂v y ∂vz
+
+
∂x ∂y
∂z
(26)
Nelle definizioni (25) e (26) il prodotto delle componenti del nabla per la funzione scalare f o per le
componenti del vettore v è tale per cui la componente del nabla - il simbolo di derivata parziale agisce sulla funzione scalare f o sulla componente del vettore come una normale derivata.
I.4.6 Derivata totale
Nella descrizione euleriana del moto le grandezze fisiche dipendono dalle coordinate fisse x,y,z e
dal tempo. Le variazioni rispetto al tempo delle grandezze fisiche devono però essere calcolate
tenendo conto del moto del corpo, ossia tenendo conto del fatto che le grandezze fisiche sono
associate alle particelle fluide. Per esprimere la variazione totale rispetto al tempo delle grandezze
fisiche si deve perciò considerare che nell’istante t la particella fluida occupa la posizione
individuata dalle coordinate x,y,z, mentre nell’istante t+∆t la particella fluida si è spostata e
contemporaneamente la grandezza fisica ad essa associata è variata. La variazione totale della
grandezza fisica viene pertanto distinta nei seguenti contributi:
1. il contributo dovuto alla variazione della grandezza considerata durante l’intervallo di
tempo ∆t nel punto x,y,z;
2. il contributo dovuto al fatto che la particella fluida, cui la grandezza considerata è
associata, ha effettuato uno spostamento durante l’intervallo di tempo ∆t;
tali contributi devono essere considerati contemporaneamente se si vuole ottenere la variazione
totale della grandezza nell’intervallo di tempo considerato. Si può procedere nel modo seguente. Sia
f=f(x,y,z,t) la grandezza considerata. All’istante t+∆t la particella fluida, che all’istante t si trovava
in x,y,z e cui è associata la grandezza di cui si vuole calcolare la variazione, si è spostata
in x + u∆t , y + v∆t , z + w∆t , essendo u,v,w le componenti del vettore velocità rispettivamente
secondo gli assi x,y,z del sistema di riferimento cartesiano ortogonale. La variazione totale della
grandezza f è perciò data dalla:
∆f = f ( x + u∆t , y + v∆t , z + w∆t , t + ∆t ) − f ( x, y, z , t )
(27 )
Il primo termine a secondo membro della (27) può essere espanso in serie di Taylor di punto
iniziale x,y,z,t, arrestata al primo ordine:
∆f = f ( x, y, z , t ) +
∂f
∂f
∂f
∂f
∆t + u∆t + v∆t + w∆t + O(∆t 2 ) − f ( x, y, z , t )
∂t
∂x
∂y
∂z
11
(28)
in cui il simbolo O (∆t 2 ) rappresenta sinteticamente il resto della serie di Taylor, proporzionale a
∆t 2 . Dividendo ora primo e secondo membro della (28) per ∆t e facendo tendere quest’ultimo a
zero si ottiene la derivata totale rispetto al tempo della f:
∂f
∂t
{
df
=
dt
+
Termine locale
∂f
∂f
∂f
u+ v+ w
∂x
∂y
∂z
144
42444
3
(29)
Termine convettivo
Come si può vedere dal secondo membro della (29), tale derivata consiste nella somma di vari
termini. Il primo è la derivata parziale di f rispetto al tempo, nella posizione x,y,z. I termini dal
secondo al quarto sono le derivate parziali rispetto alle tre coordinate spaziali moltiplicate per le
rispettive componenti di velocità. Tali tre termini possono essere visti come la variazione spaziale
della grandezza f per uno spostamento nell’intervallo di tempo unitario, di componenti u,v,w. Il
primo termine viene definito termine locale. La somma degli altri tre termini viene invece definita
termine convettivo. Nel complesso la derivata (29) viene definita derivata totale o sostanziale o
materiale della grandezza considerata, proprio perché calcola la variazione della grandezza tenendo
conto della variazione totale di quest’ultima seguendo il moto del corpo fluido.
Se il moto è permanente, ossia se non vi è dipendenza esplicita dal tempo, il primo termine a
secondo termine nella (29) è identicamente nullo. Nel complesso però la derivata totale della
grandezza f potrà essere diversa da zero se le variazioni spaziali di essa saranno diverse da zero. La
variazione temporale della grandezza in tal caso è fornita dal fatto che identificando un punto nel
corpo fluido e seguendone il moto, la grandezza assume differenti valori in corrispondenza delle
differenti posizioni occupate dal punto.
Se il moto è uniforme rispetto alle tre direzioni spaziali, le tre derivate spaziali risultano
identicamente nulle e solo il primo termine a secondo membro della (29) potrà eventualmente dare
un contributo alla derivata totale.
Facendo uso del vettore nabla, è possibile esprimere il termine convettivo nel modo seguente:
u
∂f
∂f
∂f
+ v + w = (u ⋅ ∇ ) f
∂x
∂y
∂z
avendo indicato con (u ⋅ ∇ ) il prodotto scalare simbolico: u
(30)
∂
∂
∂
+v +w .
∂x
∂y
∂z
I.4.7 Teorema del trasporto
Si consideri un corpo fluido in movimento, occupante il volume materiale V nell’istante
considerato. Sia f(x,y,z,t) la densità di una qualche grandezza associata al fluido. La quantità della
grandezza contenuta nel volume è pari a: F = ∫ fdV . Si vuole calcolare la variazione rispetto al
V
tempo della F. La difficoltà consiste nel fatto che la F è una quantità definita tramite un integrale, il
cui dominio di integrazione varia nel tempo. La variazione rispetto al tempo della F deve tener
conto di tale fatto. A tale scopo, si assuma che il corpo fluido sia costituito dalla unione di N
corpuscoli fluidi elementari. Di conseguenza, si potrà approssimare il calcolo della F tramite
l’espressione:
F = ∫ fdV ≈
V
∑ f ∆V
k =1, N
k
12
k
(31)
in cui l’integrale è stato approssimato da una sommatoria e in cui f k , ∆Vk sono rispettivamente il
valore medio della densità f all’interno del kmo corpuscolo fluido e il volume materiale di
quest’ultimo. La variazione rispetto al tempo della F può essere pertanto definita come:
dF d
∆Vk
∆f
= ∫ fdV ≈ ∑ k ∆Vk + f k
dt dt V
∆t
k =1, N ∆t
(32)
E’ possibile ora sfruttare le formule (11) e (15) ed esprimere la (32) nel modo seguente:
∆f
∂u ∂v ∂w
dF
∆Vk
≈ ∑ k ∆Vk + f k + +
dt k =1, N ∆t
∂x ∂y ∂z k
(33)
A questo punto si fa tendere il numero N dei corpuscoli all’infinito e il volume materiale di questi a
zero: di conseguenza si può risostituire al simbolo di sommatoria quello di integrale e al simbolo di
differenza finita ∆ il simbolo di infinitesimo d.
dF
=
dt
df
∫ dt dV
V
1
424
3
Termine di variazione della densità f
+
∂u
∂v
∂w
∫ f ∂x + ∂y + ∂z dV
(34)
V
1444
424444
3
Termine di variazione del volume materiale
In definitiva quindi, la variazione temporale della grandezza globale F viene calcolata tramite
operazioni di integrazione effettuate su un volume di controllo V coincidente istantaneamente con il
volume materiale all’istante t. Nella (34) si vede come tale variazione sia costituita dalla somma di
un termine che tiene conto della sola variazione della densità f, all’interno del volume di controllo
V, e di un termine che tiene conto della variazione rispetto al tempo del volume materiale
La formula (34) costituisce il cosiddetto teorema del trasporto. Di fondamentale importanza nella
meccanica dei fluidi in quanto riporta il calcolo delle derivate temporali di grandezze integrali
relative a corpi fluidi e definite su volumi materiali, al calcolo di grandezze integrali su volumi di
controllo, coincidenti istantaneamente coi volumi materiali. Una forma alternativa della (34), molto
importante nelle applicazioni, la si ottiene sostituendo nella (34) l’espressione (29) della derivata
materiale e applicando il teorema della divergenza al vettore v=fu:
∂f
∂u ∂v ∂w
dF
∂f
∂f
∂f
dV =
= ∫ + u + v + w + f + +
dt V ∂t
∂x
∂y
∂z
∂x ∂y ∂z
∂fu ∂fv ∂fw
∂f
∂f
∫V ∂t dV + V∫ ∂x + ∂y + ∂z dV = V∫ ∂t dV − ∫S fu ⋅ ndS
(35)
essendo S la superficie chiusa di contorno del volume di controllo V, istantaneamente coincidente
col volume materiale del corpo fluido considerato. La grandezza f può essere di natura scalare o
vettoriale: in quest’ultimo caso, la forma alternativa del teorema del trasporto risulta essere la
seguente:
dF
∂f
= ∫ dV − ∫ f (u ⋅ n )dS
dt V ∂t
S
13
(36)