Corsi di laurea in Ingegneria Civile e Industriale, Università del Salento
Esame di Meccanica Razionale del 18 settembre 2014
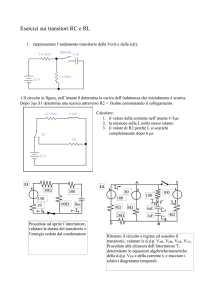
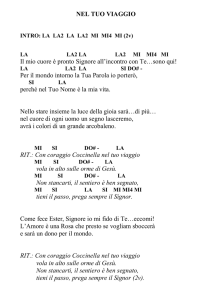
Nel sistema di figura, sito nel piano verticale con l’asse i diretto come la verticale discendente, un disco omogeneo di
raggio R e massa M , è incernierato nel punto O posto sulla sua circonferenza. Un punto materiale P di massa m è
saldato sul bordo del disco in maniera tale che le congiungenti CO e CP formino un angolo orario retto. Si considerino
tutti i vincoli ideali e si scelga come coordinata libera l’angolo antiorario θ che la verticale forma con OC.
√
√
1. Determinare il rapporto M/m tale per cui il sistema è in equilibrio con xP = R( 3 + 1)/2 e yP = R( 3 − 1)/2.
2. Mostrare che tale configurazione di equilibrio è stabile.
3. Determinare la frequenza delle piccole oscillazioni.
4. Si fissi M = m. Supposto che all’istante t0 il sistema si trovi nella configurazione in cui xP (t0 ) = 0 e yP (t0 ) > 0
con θ̇(t0 ) = 0, determinare la velocità angolare del sistema all’istante tf in cui xP (tf ) > 0 e yP (tf ) = 0.
5. Nelle ipotesi del punto precedente, calcolare le reazioni vincolari all’istante t0 .
6. Calcolare la forza che applicata in P , tangenzialmente al disco, fa ruotare il sistema con velocità angolare costante
ω = Ωo k.
O
j
P, m
θ
R, M
i
C
Soluzione
1. Scriviamo le coordinate di P in funzione di θ:
xP = R(cos θ − sin θ),
yP = R(sin θ + cos θ).
Nella configurazione desiderata si avrà il sistema di equazioni
√
√
R(cos θ − sin θ) = R( 3 + 1)/2,
R(sin θ + cos θ) = R( 3 − 1)/2
che, per θ ∈ [0, 2π), ammette l’unica soluzione θ = −π/6.
D’altra parte, detta U la funzione potenziale, si ha
U (θ) = M gxC + mgxP = (M + m)gR cos θ − mgR sin θ.
Applicando il teorema di stazionarietà
U ′ (θ = −π/6) = 0
⇔
√
1
3
−(M + m)gR − mgR
=0
2
2
che dà
√
M
= 3−1
m
2. La derivata seconda del potenziale è
U ′′ (θ) = −(M + m)gR cos θ + mgR sin θ
√
e dunque, sostituendo M = m( 3 − 1) e θ = −π/6
U ′′ (θ = −π/6) = −2mgR < 0.
3. Esprimiamo l’energia cinetica in funzione della coordinata libera:
√ 2
1 D 2 1
1 3
1
1 3
2
2
2
T = IO
2
θ̇)
=
θ̇
+
θ̇
+
mv
=
M
R
m(R
M
+
2m
R2 θ̇2 ,
P
2 z
2
2 2
2
2 2
quindi la matrice di massa è la funzione constante
a(θ) =
3
M + 2m R2 .
2
√
Si può subito concludere che la frequenza delle piccole oscillazioni è (con la sostituzione M = m( 3 − 1) )
s
4g
√
ω=
(3 3 + 1)R
4. L’energia meccanica è un integrale primo del moto. La sua espressione in funzione della coordinata libera è
1 3
E(θ, θ̇) = T − U =
M + 2m R2 θ̇2 − (M + m)gR cos θ + mgR sin θ.
2 2
D’altra parte si deduce che all’istante t0 si ha θ0 := θ(t0 ) = π/4 e θ̇0 := θ̇(t0 ) = 0, mentre all’istante tf si ha
θf := θ(tf ) = −π/4. Poniamo inoltre θ̇f := θ̇(tf ). Scriviamo la conservazione dell’energia tra la configurazione iniziale
e quella finale (con M = m)
√
√
2
2
7
2 2
−mgR
= mR θ̇f − 3mgR
,
2
4
2
dalla quale otteniamo
s
√
2g
.
θf = ±2
7R
5. Nella configurazione all’istante t0 il sistema non è all’equilibrio. Detta Φ = VO i + HO j la reazione vincolare in O,
la prima equazione cardinale della dinamica si scrive
Q̇x (t0 ) = VO (t0 ) + 2mg,
D’altra parte
3
Q̇x (t0 ) = − √ mRθ̈(t0 ),
2
Q̇y (t0 ) = HO (t0 ).
1
Q̇y (t0 ) = √ mRθ̈(t0 ).
2
Dove θ̈ soddisfa l’equazione pura del moto (Ṫ = U̇ ):
7
mR2 θ̈ = −2mgR sin θ − mgR cos θ,
2
dalla quale si ottiene
√
3 2g
.
θ̈(t0 ) = −
7R
Le reazioni vincolari cercate saranno quindi
5
V0 = − mg,
7
3
H0 = − mg
7
(1)
6. Posto F = F cos θi + F sin θj, la usa potenza sarà
ΠF = F · vP = −F Rθ̇.
L’equazione pura del moto (1) acquista un termine aggiuntivo:
7
mR2 θ̈ = −2mgR sin θ − mgR cos θ − F R.
2
Nell’ipotesi del punto 6, si ha θ(t) = Ω0 t e quindi
F (t) = −2mg sin(Ω0 t) − mg cos(Ω0 t).