Nozioni fondamentali di Cinematica
1) Mobile: qualsiasi oggetto o corpo che è in grado di muoversi
2) Posizione di un oggetto: è il punto nello spazio da esso occupato; si indica con la lettera S
seguita dalle tre coordinate oppure dalla lettera “t” quando cambia nel tempo, S(x;y;z;) oppure
S(t). E’ specificata senza possibilità di errori quando dello oggetto si danno le sue coordinate (3
nello spazio,2 nel piano,1 sulla retta).
3) Traiettoria: è la linea continua che unisce tutte le posizioni (punti dello spazio) attraverso le quali
un oggetto in movimento è passato.
4) Punto Materiale: E’ una semplificazione di un corpo esteso (e mobile) considerato però come un
punto geometrico, cioè privo di dimensioni, ed individuabile univocamente (cioè senza possibilità
di errore) per mezzo solo di tre coordinate (invece che infinite), e dotato di massa. Tutti i corpi
estesi possono essere considerati come punti materiali quando gli spostamenti che compiono
durante il loro moto sono molto più grandi delle loro dimensioni (almeno 100 o 1000 volte).
5) Sistema di Riferimento: E’ l’insieme di una terna di assi cartesiani mutuamente ortogonali, di un
metro (per misurare le distanze percorse) e di un orologio (per specificare l’istante di tempo al
quale la posizione è stata rilevata).
6) Spostamento: è la variazione di posizione di un mobile; si indica con la combinazione di caratteri
S = variazione di posizione = Posizione finale – Posizione iniziale = S(tfin)-S(tin)
Moto uniforme: è il moto di un mobile che compie spostamenti uguali in intervalli di tempo uguali.
Moto rettilineo: è il moto di un mobile la cui traiettoria è una linea retta.
Moto rettilineo uniforme: è il moto di un mobile che risulta simultaneamente rettilineo ed uniforme.
Velocità: grandezza fisica che fornisce informazioni (quantifica) sugli spostamenti percorsi da un mobile
al trascorrere del tempo. E’ calcolabile come rapporto tra lo spostamento percorso e l’intervallo di tempo
impiegato a percorrerlo:
vS/t
Nel S.I. l’unita di misura della velocità è data da: [v] = [S]/[t]
1
In base alla definizione data di velocità un moto si può dire uniforme,in moto equivalente, quando la
velocità del mobile è costante nel tempo:
MOTO UNIFORME VELOCITA COSTANTE
Legge del moto o legge oraria: è una legge matematica, una tabella o un grafico che consente di
determinare la posizione del mobile S al trascorrere del tempo,cioè istante per istante .
Delle tre modalità nelle quali può essere data la legge del moto la più completa è sicuramente la legge
matematica perchè da essa è sempre possibile ricavare sia la tabella che il grafico mentre non sempre è
possibile il contrario. Insieme alla legge V(t) che fornisce la variazione della velocità al trascorrere del
tempo, rappresenta il massimo dell’informazione che è possibile avere sul moto di un mobile.
Legge del Moto Rettilineo Uniforme:
Tale moto rappresenta il modo più semplice per iniziare lo studio della cinematica poiché rappresenta il
moto più semplice da descrivere. In esso infatti è sufficiente un'unica coordinata per determinare la
posizione del mobile ed inoltre la legge V(t) non cambia nel tempo ed è una semplice costante
dimensionale. A partire proprio da tale condizione, impiegando la definizione stessa di velocità è
possibile ricavare con semplici passaggi matematici la legge del moto rettilineo uniforme:
v( t )
S
v 0 S = v0 t Sfin – Sin = v0 (tfin – tin) Sfin = Sin + v0 (tfin – tin), oppure,
t
come è generalmente riportato nei testi di Fisica:
S(t) = S(t0) + v0 (t – t0)
dove: S(t) = posizione all’istante t (generico)
S(t0) = posizione all’istante t0 (nota)
t0 = istante di tempo “iniziale” (noto)
v0 = velocità costante del mobile (nota)
t = istante generico al quale si intende calcolare la posizione del mobile S(t)
Conoscendo t0, S(t0) e v0 è possibile calcolare la posizione del mobile in qualsiasi altro istante di tempo t,
futuro ma anche passato ( cioè precedente a t0):
0m
s(t0)
5m
S(t)
11m
S(m)
S(t)
3s
7s
t(s)
2
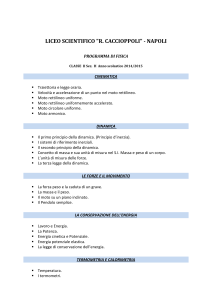
(Esempio di calcolo, automatizzato, di cinque diversi moti uniformi)
S(t) = S(to)+Vo(t-to)
to
S(to)
Vo
Retta 1:
1
5
3
S(t)= 5 m + (
3
)m/s * [ t - ( 1 )] s
t(s)
S(m)
t(s)
S(m)
t(s)
S(m)
t(s)
S(m)
t(s)
S(m)
Retta 2:
1
5
7
S(t)= 5 m + (
7
)m/s * [ t - ( 1 )] s
-7
-19,00
-7
-51,00
-7
-40,00
-7
-15,00
-7
29,00
Retta 3:
8
5
3
S(t)= 5 m + (
3
)m/s * [ t - ( 8 )] s
-4
-10,00
-4
-30,00
-4
-31,00
-4
-6,00
-4
20,00
Retta 4:
1
9
3
S(t)= 9 m + (
3
)m/s * [ t - ( 1 )] s
-1
-1,00
-1
-9,00
-1
-22,00
-1
3,00
-1
11,00
Retta 5:
1
5
-3
S(t)= 5 m + ( -3
)m/s * [ t - ( 1 )] s
0
2,00
0
-2,00
0
-19,00
0
6,00
0
8,00
1
4
6
7
9
5,00
14,00
20,00
23,00
29,00
1
4
6
7
9
5,00
26,00
40,00
47,00
61,00
1
4
6
7
9
-16,00
-7,00
-1,00
2,00
8,00
1
4
6
7
9
9,00
18,00
24,00
27,00
33,00
1
4
6
7
9
5,00
-4,00
-10,00
-13,00
-19,00
4
5
8
9
Campi ad immissione libera
Campi ad elaborazione automatica
Moto Rettilineo Uniforme
40,00
30,00
20,00
Posizione (m)
10,00
-8
-7
-6
-5
-4
-3
0,00
-2-10,00
-1 0
1
2
3
6
7
10
-20,00
-30,00
-40,00
-50,00
-60,00
Tempo (s)
Moto vario
Il moto di un mobile che si muove a velocità non costante (in almeno una delle tre proprietà del vettore,
modulo, direzione o verso), si dice moto vario. Esso rappresenta il moto più complicato da studiare e
descrivere e per tale motivo generalmente fra tutti i possibili moti vari si preferisce iniziare con lo studio
di un moto vario semplice, il moto rettilineo uniformemente accelerato. Prima di ciò è necessario però
introdurre alcune nuove definizioni cinematiche.
Quando la velocità varia nel tempo risulta spesso difficile se non impossibile specificarla istante per
istante (V(t));per tale motivo è in genere possibile dare una prima informazione ,meno dettagliata, circa la
velocità del mobile, la sua velocità media.
Velocità media
Si definisce velocità media il rapporto fra lo spostamento totale compiuto dal mobile in un certo intervallo
di tempo e l’intervallo di tempo stesso:
v
S tot
t tot
3
La velocità media, pur non essendo la velocità del mobile istante per istante, né talvolta la velocità
assunta dal mobile in alcun momento, rappresenta comunque un informazione valida perché risulta
essere, in pratica , la velocità che un altro mobile avrebbe dovuto mantenere in modo costante, nello
stesso intervallo di tempo, per compiere lo stesso spostamento totale (e giungere quindi nella stessa
posizione finale nello stesso istante, cioè contemporaneamente al mobile che si è mosso di moto vario).
Velocità istantanea
Per aumentare l’informazione sulla velocità del moto l’unica possibilità praticabile è suddividere
l’intervallo di tempo totale impiegato in intervalli di tempo più piccoli e calcolare in ognuno di essi la
velocità media con la quale il mobile si è mosso. Maggiore sarà il numero delle suddivisioni maggiore
sarà l’informazione disponibile, a prezzo però di una maggiore quantità di informazioni ed elaborazioni
necessaria. Portando alle estreme conseguenze questo ragionamento si intuisce che il massimo delle
informazioni si ottiene considerando intervalli di tempo piccolissimi, praticamente prossimo a 0. In effetti
in tal modo si arriva alla definizione operativa di velocità istantanea, che è calcolabile come rapporto tra
lo spostamento effettuato e l’intervallo di tempo impiegato quando quest’ultimo tende a 0:
v ist
S
t
t 0
Moto uniformemente accelerato
Dal momento che il moto vario non è così semplice da studiare e descrivere come il moto rettilineo
uniforme è lecito chiedersi se tra tutti gli infiniti possibili moti vari ne esiste qualcuno più semplice da
descrivere.
In realtà è possibile rispondere affermativamente a questa domanda considerando che, se in un moto vario
la velocità non è più costante come nel moto uniforme, ma varia istante per istante, è possibile che essa
vari non in modo casuale ma in un modo ben preciso.
Esiste infatti un moto vario più semplice degli altri perché in esso il mobile viaggia ad una velocità che
non varia a caso ma a parità di intervallo di tempo aumenta (o diminuisce) sempre della stessa quantità; si
può per esempio considerare un mobile la cui velocità aumenti sempre di 3 m/s al trascorrere di ogni
secondo, per cui, se per esempio parte da fermo, dopo il I° secondo raggiunge una velocità di 3 m/s, dopo
il II° secondo raggiunge una velocità di 6 m/s, dopo il III° 9 m/s e così via.
Dal punto di vista matematico ciò si esprime dicendo che la velocità sta aumentando linearmente nel
tempo.
Per esprimere concisamente tale particolare moto è necessario però a questo punto introdurre una nuova
grandezza cinematica che consente di descrivere esattamente come la velocità varia nel tempo,
l’accelerazione.
4
Si definisce accelerazione la grandezza fisica che quantifica le variazioni di velocità al trascorrere del
tempo.
Si definisce operativamente come rapporto tra la variazione di velocità v del mobile e l’intervallo di
tempo in cui tale variazione t è avvenuta:
a
v
t
Passando alla sua equazione dimensionale è possibile ricavare la sua unità di misura nel S.I.:
[a ]
[v] m/s m 1 m
2
[ t ]
s
s s s
In base alla definizione data di accelerazione si può ora affermare che un moto in cui la velocità del
mobile cresce linearmente nel tempo è necessariamente un moto ad accelerazione costante (nel tempo); se
infatti la velocità varia sempre della stessa quantità v a parità di intervallo di tempo t il rapporto v/t
deve necessariamente essere sempre lo stesso qualsiasi t si consideri, e quindi:
Moto uniformemente accelerato a
v
costante nel tempo a 0
t
Legge oraria della velocità del moto uniformemente accelerato
In un moto uniformemente accelerato è allora semplice ricavare la legge oraria della velocità v(t), cioè la
legge che permette di calcolare la velocità del mobile al trascorrere del tempo (istante per istante). Dal
punto di vista matematico è lo stesso calcolo eseguito per la legge del moto uniforme; si parte dalla
condizione appena ricavata sulla accelerazione:
a (t)
v
a 0 v = a0 t vfin – vin = a0 (tfin – tin) vfin = vin + v0 (tfin – tin)
t
o, come usualmente, si scrive:
v(t) = v(t0) + a0 (t – t0)
dove: v(t) = velocità all’istante t
v(t0) = velocità all’istante t0 (nota)
t0 = istante di tempo “iniziale” (noto)
a0 = accelerazione costante del mobile (nota)
t = istante generico al quale si intende calcolare la velocità del mobile S(t)
5
Moti nel piano e nello spazio
Quando un mobile non effettua moti rettilinei (unidimensionali) ma si muove nel piano o
nello spazio le grandezze cinematiche fondamentali finora studiate, spostamento, velocità
ed accelerazione, sono da ridefinire necessariamente in forma vettoriale e questo comporta
ovviamente una maggiore difficoltà nella loro definizione e determinazione.
Innanzitutto è da considerare infatti che già la posizione del mobile non è più esprimibile
attraverso una singola coordinata ma tramite due o tre (moto nel piano e nello spazio
rispettivamente) e questo comporta che in realtà vanno calcolate due o tre leggi del moto,
una per ogni coordinata del mobile: Sx(t), Sy(t) e Sz(t) e analogamente per la legge oraria
della velocità e dell’accelerazione: v(t) e a(t).
1) Spostamento: generalizzando la definizione adottata nel moto rettilineo (come
variazione di posizione), è definibile come il vettore che ha come modulo la
distanza tra la posizione finale e quella iniziale, come direzione la retta passante per
i due punti dello spazio che specificano le due posizioni del mobile e come verso
quello che va dalla posizione iniziale e finale del mobile
2) Velocità: per tale grandezza è necessario distinguere tra il vettore velocità media e
quello velocità istantanea poiché hanno generalmente direzione, modulo e verso
distinti, eccetto che nel caso del moto rettilineo uniforme, in cui coincidono:
Velocità media: generalizzando al caso tridimensionale la definizione data nel
moto rettilineo
(v
Stot
t tot
) ne consegue necessariamente che il vettore
velocità media ha direzione e verso coincidenti con quelli del vettore
spostamento totale e modulo pari al rapporto tra il modulo di quest’ultimo
vettore e l’intervallo di tempo totale impiegato a percorrere tale spostamento:
Velocità istantanea:
6
Moto circolare: si definisce moto circolare quello di un mobile la cui traiettoria è una
circonferenza.
Moto circolare uniforme:si definisce moto circolare uniforme quello di un mobile la
cui traiettoria è una circonferenza e il cui modulo della velocità è costante nel tempo:
v
Stot
t tot
In tal caso la velocità istantanea del mobile risulta non costante per quanto attiene la
direzione ed il verso.
Per un moto circolare uniforme si definisce periodo T di rivoluzione l’intervallo di
tempo che il mobile impiega a percorrere l’intera circonferenza.
Per un moto circolare uniforme è abbastanza semplice calcolare il modulo del vettore
velocità; basta infatti considerare come spostamento una circonferenza completa e
come intervallo di tempo il periodo T di rivoluzione del mobile:
7