LEZIONE 8
8.1. Prodotto scalare.
Dati i vettori geometrici ~v = vx~ı + vy~ + vz~k e w
~ = wx~ı + wy~ + wz~k di R3 definiamo
prodotto scalare di ~v e w
~ il numero
wx
h~v , wi
~ = ( vx vy vz ) wy = vx wx + vy wy + vz wz .
wz
p
Ricordando la Formula (7.3.1) otteniamo |~v | = h~v , ~v i.
Esempio 8.1.1. Si considerino i vettori ~ı = 1~ı +0~ +0~k , ~ = 0~ı +1~ +0~k , ~k = 0~ı +0~ +1~k .
Allora
h~ı ,~ı i = h~ , ~ i = h~k , ~k i = 1,
h~ı , ~ i = h~ ,~ı i = h~ı , ~k i = h~k ,~ı i = h~ , ~k i = h~k , ~ i = 0.
Si considerino poi i due vettori ~v = ~ı + ~ + ~k e w
~ = 3~ı − ~ − ~k . Allora
h~v , wi
~ = 1 · 3 + 1 · (−1) + 1 · (−1) = 1.
La definizione algebrica di prodotto scalare implica la seguente
Proposizione 8.1.2. Valgono le seguenti proprietà:
(PS1) per ogni ~v , w
~ ∈ Vn (O) si ha h~v , wi
~ = hw,
~ ~v i (il prodotto scalare è commutativo);
(PS2) per ogni ~u, ~v , w
~ ∈ Vn (O) si ha h~u, ~v + wi
~ = h~u, ~v i + h~u, wi
~ (il prodotto scalare è
distributivo rispetto alla somma);
(PS3) per ogni α ∈ R e ~v , w
~ ∈ Vn (O) si ha αh~v , wi
~ = hα~v , wi;
~
~
(PS4) per ogni ~v ∈ Vn (O)\{ 0 } si ha h~v , ~v i > 0 (il prodotto scalare è definito positivo). Si noti che le componenti di un vettore rispetto ad un sistema di riferimento possono
essere descritte facilmente in termini di prodotti scalari.
Infatti se ~v = vx~ı + vy~ + vz~k allora si possono considerare i coefficienti di Fourier di ~v
rispetto al sistema di riferimento O~ı~~k vx = h~v ,~ı i, vy = h~v , ~ i, vz = h~v , ~k i: si ha perciò la
decomposizione
~v = h~v ,~ı i~ı + h~v , ~ i~ + h~v , ~k i~k .
La seguente interpretazione geometrica mostra che il prodotto scalare è indipendente
dal sistema di riferimento scelto ma dipende solo dai vettori coinvolti. A tale scopo
introduciamo la definizione di angolo fra vettori (si veda la Figura 8.1.4).
Typeset by AMS-TEX
1
2
8.1. PRODOTTO SCALARE
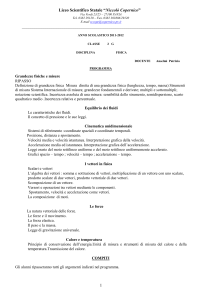
Definizione 8.1.3. Siano ~v , w
~ ∈ Vn (O) vettori non nulli.
i) Se ~v 6k w
~ sia T il triangolo avente vertici in O e negli estremi liberi di ~v e w:
~ definiamo
c
angolo fra ~v e w
~ la misura in radianti, ~v w,
~ dell’angolo interno inOO del triangolo T .
B
ii) Se ~v k w
~ sono concordi definiamo ~vc
w
~ = 0.
iii) Se ~v k w
~ sono discordi definiamo ~vc
w
~ =π
v^w
w
v
O
Figura 8.1.4
Poiché la somma delle misure degli angoli interni di un triangolo è π, segue che ~vc
w
~ ∈
[0, π] e ~vc
w
~ = 0, π se e solo se ~v kw.
~
Proposizione 8.1.5. Dati ~v , w
~ ∈ V3 (O) o almeno uno dei due vettori è nullo, e si ha
h~v , wi
~ = 0, o sono entrambi non nulli e si ha h~v , wi
~ = |~v ||w|
~ cos(~vc
w).
~
Dimostrazione. Siano ~v = vx~ı +vy~ +vz~k e w
~ = wx~ı +wy~ +wz~k . SeO i vettori sono paralleli
B
(in particolare se uno dei due è nullo) è facile verificare la tesi a partire dalla definizione.
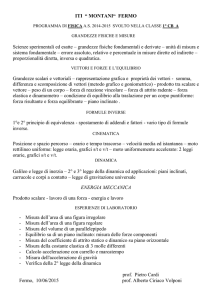
Supponiamo allora che i vettori ~v , w
~ ∈ V3 (O) non siano paralleli come in Figura 8.1.5.1
y
A
v
v-w
v^w
O
x
w
B
Figura 8.1.5.1
Per il Teorema di Carnot, ricordando il significato geometrico di differenza di vettori
LEZIONE 8
3
applicati, si ha che |~v − w|
~ 2 = |~v |2 + |w|
~ 2 − 2|~v ||w|
~ cos(~vc
w),
~ quindi
(8.1.5.1)
1
|~v ||w|
~ cos(~vc
w)
~ = (|~v |2 + |w|
~ 2 − |~v − w|
~ 2 ).
2
Siano ~v = vx~ı + vy~ + vz~k e w
~ = wx~ı + wy~ + wz~k . Ricordando la Formula (7.3.1)
2
2
2
2
2
2
2
2
|~v | = xv + yv + zv , |w|
~ = xw + yw
+ zw
, |~v − w|
~ 2 = (xv − xw )2 + (yv − yw )2 + (zv − zw )2 .
Sostituendo le espressioni sopra nella Formula (8.1.5.1) otteniamo |~v ||w|
~ cos(~vc
w)
~ = h~v , wi
~
che si estende anche al caso di vettori paralleli o nulli. Alla luce di questa proposizione discende immediatamente che h~ı ,~ı i = h~ , ~ i = h~k , ~k i =
1, h~ı , ~ i = h~ ,~ı i = h~ı , ~k i = h~k ,~ı i = h~ , ~k i = h~k , ~ i = 0 come già verificato nell’Esempio
8.1.1.
Facciamo ora alcune osservazioni. Una prima osservazione importantissima è che il
prodotto h~v , wi
~ è nullo se e solo se o almeno uno dei due vettori è nullo oppure se cos(~vc
w)
~ =
c
0, cioè se ~v w
~ = π/2, cioè h~v , wi
~ = 0: per questo motivo introduciamo la seguente
Definizione 8.1.6. I vettori ~v , w
~ ∈ V3 (O) si dicono perpendicolari o ortogonali, e scriveremo ~v ⊥ w,
~ se e solo se h~v , wi
~ = 0.
Inoltre, se ~v e w
~ non sono nulli,
cos(~vc
w)
~ =
h~v , wi
~
,
|~v ||w|
~
quindi il segno di h~v , wi
~ è esattamente il segno di cos(~vc
w):
~ in particolare h~v , wi
~ > 0 se e
solo se ~vc
w
~ ∈ [0, π/2[, cioè se e solo se ~v e w
~ formano un angolo acuto, mentre h~v , wi
~ <0
c
se e solo se ~v w
~ ∈]π/2, π], cioè se e solo se ~v e w
~ formano un angolo ottuso.
Esempio 8.1.7. Si considerino i vettori ~v e w
~ dell’Esempio 8.1.1.√Poiché h~v ,√wi
~ = 1 i
due vettori formano un angolo acuto: precisamente essendo |~v | = 3, |w|
~ = 11 si ha
√
c
cos(~v w)
~ = 1/ 33.
Invece i vettori ~v 0 = 3~ı + ~ − ~k e w
~ 0 = ~ı − ~ + 2~k sono perpendicolari: infatti h~v , wi
~ =
3 · 1 + 1 · (−1) + (−1) · 2 = 0.
Poiché la funzione coseno è limitata in modulo da 1 abbiamo anche la disuguaglianza
di Cauchy–Schwartz
|h~v , wi|
~ ≤ |~v ||w|
~
in cui vale l’uguaglianza se e solo se i vettori ~v e w
~ sono paralleli. Si considerino ora due
vettori ~v , w
~ ∈ V3 (O). Allora, applicando le proprietà (PS1) e (PS2) della Proposizione
8.1.2
|~v + w|
~ 2 = h~v + w,
~ ~v + wi
~ = h~v , ~v + wi
~ + hw,
~ ~v + wi
~ =
= h~v , ~v i + h~v , wi
~ + hw,
~ ~v i + hw,
~ wi
~ = |~v |2 + 2h~v , wi
~ + |w|
~2≤
≤ |~v |2 + 2|h~v , wi|
~ + |w|
~ 2 ≤ |~v |2 + 2|~v ||w|
~ + |w|
~ 2 = (|~v | + |w|)
~ 2.
4
8.1. PRODOTTO SCALARE
Poiché |~v + w|
~ e |~v | + |w|
~ sono quantità non negative, la catena di diseguaglianze di cui
sopra dimostra la disuguaglianza triangolare
|~v + w|
~ ≤ |~v | + |w|
~
dove l’uguaglianza vale se e solo se o ~v e w
~ sono paralleli e concordiO o almeno uno di loro
B
è nullo.
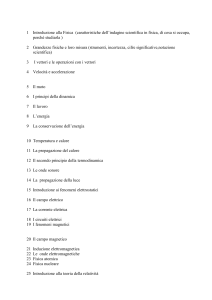
Osservazione 8.1.8. Il prodotto scalare è legato alla nozione di proiezione ortogonale.
Infatti, come è facile vedere in Figura 8.1.8.1,
v
H
v^w
O
w
P
Figura 8.1.8.1
h~v , wi
~ non è altro che il prodotto della lunghezza di ~v per la lunghezza della proiezione di
w
~ lungo la direzione di ~v (o viceversa).
~ proiezione di w
In particolare se si desidera determinare il vettore w
~ k = OH
~ lungo la
direzione di ~v (si veda la Figura 8.1.8.1) è sufficiente applicare la formula
h~v , wi
~ ~v
h~v , wi
~
h~v , wi
~
|w||~
~ v | cos(~vc
w)
~ ~v
=
=
~v =
~v .
w
~ k = |w|
~ cos(~vc
w)
~ vers(~v ) =
2
|~v |
|~v |
|~v | |~v |
|~v |
h~v , ~v i
Si noti che il triangolo OHP è rettangolo in H, dunque, ricordando il significato geometrico
di differenza di vettori, il vettore w
~⊥ = w
~ −w
~ k è perpendicolare a w
~ k : in particolare questo
ci dà un metodo per decomporre un vettore lungo due direzioni perpendicolari di cui fissata,
poiché w
~ =w
~k + w
~ ⊥.
Per esempio si considerino i vettori ~v = ~ı + ~ − ~k e w
~ = ~ı − 2~ + 3~k e determiniamo la
proiezione w
~ k di w
~ lungo la direzione di ~v : si ha
w
~k =
h~ı − 2~ + 3~k ,~ı + ~ − ~k i
4
(~ı + ~ − ~k ) = − (~ı + ~ − ~k ).
3
h~ı + ~ − ~k ,~ı + ~ − ~k i
Si noti che w
~ =w
~k + w
~ ⊥ ove
w
~⊥ = w
~ −w
~k =
1
(7~ı − 2~ + 5~k ) ⊥ w
~ k.
3
LEZIONE 8
5
8.2. Prodotto vettoriale.
Dati i vettori geometrici ~v = vx~ı + vy~ + vz~k e w
~ = wx~ı + wy~ + wz~k di R3 definiamo
prodotto vettoriale di ~v e w
~ il vettore di V3 (O)
~v × w
~ = (vy wz − vz wy )~ı − (vx wz − vz wx )~ + (vx wy − vy wx )~k .
La formula di cui sopra è un po’ difficile da ricordare. Un artificio utile può essere quello
di utilizzare la nozione di determinante scrivendo
vx vy vx vz v y vz ~
~ı − ~v × w
~ = wx wz ~ + wx wy k .
wy wz Si noti che i coefficienti possono essere ottenuti considerando i determinanti delle matrici
ottenute da
v x v y vz
wx wy wz
cancellando via via le colonne. Spesso, ricordando
matrice 3 × 3, si utilizza anche la notazione
~ı
~
~v × w
~ = vx vy
wx wy
la definizione di determinante di una
~k vz .
wz Esempio 8.2.1. Riprendiamo in considerazione i vettori dell’Esempio 8.1.1. Poiché ~ı =
1~ı + 0~ + 0~k , ~ = 0~ı + 1~ + 0~k , ~k = 0~ı + 0~ + 1~k si ha
0
~ı ×~ı = 0
0
~ı × ~ = 1
0
~ı × ~k = 0
1
0 ~
ı
−
1
0
1
0 ~
ı
−
0
0
1
0 ~ı − 0
1
0
0 ~
+
0
0
1
0 ~
+
0
0
1
0 ~ + 1
0
1 ~ ~
k = 0,
1
0 ~
k = ~k ,
1
0 ~
k = −~ .
0
Si verifichi in modo analogo che ~ × ~ = ~k × ~k = ~0, ~ × ~k = ~ı , ~k × ~ = −~ı , ~ ×~ı = −~k ,
~k ×~ı = ~ .
Si considerino poi i due vettori ~v = ~ı + ~ + ~k e w
~ = 3~ı − ~ − ~k . Allora
1
1 1 1 1 1
~
~ı − ~
~v × w
~ = 3 −1 ~ + 3 −1 k = 0~ı − 4~ − 4k .
−1 −1 Si verifichi per esercizio che w
~ × ~v = 4~ + 4~k = −~v × w.
~
Una conseguenza quasi immediata della definizione algebrica di prodotto vettoriale è la
seguente
6
8.2. PRODOTTO VETTORIALE
Proposizione 8.2.2. Valgono le seguenti proprietà:
(PV1) per ogni ~v , w
~ ∈ Vn (O) si ha ~v × w
~ = −w
~ × ~v (il prodotto vettoriale è anticommutativo);
(PV2) per ogni ~u, ~v , w
~ ∈ Vn (O) si ha (~u + ~v ) × w
~ = ~u × w
~ + ~v × w
~ (il prodotto vettoriale
è distributivo rispetto alla somma a destra);
(PV3) per ogni ~u, ~v , w
~ ∈ Vn (O) si ha ~u × (~v + w)
~ = ~u × ~v + ~u × w
~ (il prodotto vettoriale è
distributivo rispetto alla somma a sinistra);
(PV4) per ogni α ∈ R e ~v , w
~ ∈ Vn (O) si ha α(~v × w)
~ = (α~v ) × w
~ = ~v × (αw).
~
Si noti che il prodotto non è associativo: infatti, ad esempio,
(~ı ×~ı ) × ~ = ~0 6= −~ = ~ı × ~k = ~ı × (~ı × ~ ).
Le proprietà del prodotto vettoriale sopra elencate e la tabella di moltiplicazione dei
vettori ~ı , ~ , ~k determinata nell’Esempio 8.2.1, ci permette calcolare il prodotto vettoriale
di due vettori anche senza ricordarne la definizione
Esempio 8.2.3. Siano dai i vettori ~v = 2~ı + ~ − 3~k e w
~ = ~ı + ~ + ~k . Allora
~v × w
~ = (2~ı + ~ − 3~k ) × (~ı + ~ + ~k ) = 2~ı ×~ı + 2~ı × ~ + 2~ı × ~k +
+ ~ ×~ı + ~ × ~ + ~ × ~k − 3~k ×~ı − 3~k × ~ − 3~k × ~k .
Poiché ~ı × ~ı = ~ × ~ = ~k × ~k = ~0 e ~ı × ~ = ~k = −~ × ~ı , ~ı × ~k = −~ = −~k × ~ı ,
~ × ~k = ~ı = −~k × ~ , segue che
~v × w
~ = 2~k − 2~ − ~k +~ı − 3~ + 3~ı = 4~ı − 5~ + ~k .
Anche in questo caso abbiamo definito la nozione utilizzando le componenti dei vettori in
termini di coordinate. In realtà il prodotto scalare è indipendente dal sistema di riferimento
scelto ma dipende solo dai vettori coinvolti.
Proposizione 8.2.4. Dati ~v , w
~ ∈ V3 (O) o ~v k w,
~ e si ha ~v × w
~ = ~0, o ~v 6k w
~ e ~v × w
~ è
definito come segue:
i) la sua direzione è perpendicolare al piano contenente i due vettori ~v e w;
~
ii) il suo verso è tale che la terna ordinata (~v , w,
~ ~v × w)
~ sia orientata secondo la regola della
mano destra;
iii) |~v × w|
~ = |~v ||w|
~ sin(~vc
w).
~
Dimostrazione. Siano ~v = vx~ı + vy~ + vz~k e w
~ = wx~ı + wy~ + wz~k Se i vettori sono
paralleli allora in base alla definizione è facile verificare la tesi. Supponiamo allora che i
vettori siano entrambe non nulli ed iniziamo a dimostrare iii) nell’ipotesi che i vettori non
siano nulli. Si ha che
|~v × w|
~ 2 = vy2 wz2 − 2vy wz vz wy + vz2 wy2 + vz2 wx2 − 2vz2 wx2 vx2 wz2 +
+ vx2 wz2 + vx2 wy2 − 2vx wy vy wx + vy2 wx2 .
LEZIONE 8
7
Tenendo conto della definizione geometrica del prodotto scalare, si ha
|~v |2 |w|
~ 2 sin2 (~vc
w)
~ = |~v |2 |w|
~ 2 − |~v |2 |w|
~ 2 cos2 (~vc
w)
~ = |~v |2 |w|
~ 2 − h~v , wi
~ 2=
= vy2 wz2 − 2vy wz vz wy + vz2 wy2 + vz2 wx2 − 2vz2 wx2 vx2 wz2 +
+ vx2 wz2 + vx2 wy2 − 2vx wy vy wx + vy2 wx2 .
Poiché i quadrati delle quantità non negative |~v × w|
~ e |~v ||w|
~ sin(~vc
w)
~ coincidono segue iii).
Dimostriamo ii), cioè che ~v × w
~ ⊥ ~v , w.
~ A tale scopo è sufficiente verificare che h~v , ~v ×
wi
~ = hw,
~ ~v × wi
~ = 0. Risulta, ad esempio,
vx vy vx vz vy vz ~k i =
~ + ~ı − h~v , ~v × wi
~ = h~v , wx wy wx wz wy wz vy vz vx vz vx vy − vy = vx wx wz + vz wx wy = 0.
wy wz Per esercizio verificare in modo analogo che hw,
~ ~v × wi
~ = 0.
La dimostrazione di ii) viene omessa in quanto coinvolge la nozione di “matrice di
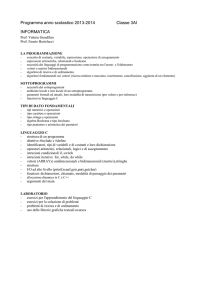
passaggio fra due basi” che esula dai limiti del corso. La proposizione precedente è bene illustrata dalla seguente figura.
vxw
w
v
O
Figura 8.2.5
Come per il prodotto scalare, anche nel caso del prodotto vettoriale, alla luce della
precedente proposizione, discende immediatamente che ~ı × ~ = ~k = −~ ×~ı , ~ × ~k = ~ı =
−~k ×~ , ~k ×~ı = ~ = −~ı × ~k e ~ı ×~ı = ~ = ~ ×~ = ~k × ~k = ~0 come già verificato nell’Esempio
8.2.1.
Facciamo alcune osservazioni. Come nel caso del prodotto scalare anche l’annullarsi del
prodotto vettoriale ~v × w
~ dà informazioni sulla posizione relativa dei due vettori ~v e w:
~
~
infatti ~v × w
~ = 0 se e solo se |~v × w|
~ = 0 se e solo se o almeno uno dei due vettori è nullo
c
c
oppure se sin(~v w)
~ = 0, cioè se ~v w
~ = 0, π, cioè se e solo se ~v k w
~ (però utilizzare questo
metodo per verificare il parallelismo di vettori è senza dubbio più oneroso che applicare la
Proposizione 7.3.9).
8
8.2. PRODOTTO VETTORIALE
Più interessante è la seguente
Osservazione 8.2.6. Il prodotto vettoriale, o meglio il suo modulo, è legato alla nozione di
area. Infatti si considerino tre punti non allineati A, B, C ∈ S3 e si consideri il triangolo
avente tali punti come vertici.
B
y
C
c
A
α
b
B-A
C-A
O
x
Figura 8.2.6.1
Allora è noto dalla trigonometria elementare che la sua area è
1
Area(ABC) = (bc sin α)
2
ove b e c sono le lunghezze dei lati opposti ai vertici B e C rispettivamente ed α è l’angolo
interno con vertice A.
D’altra parte sappiamo che il triangolo ABC è congruente al triangolo avente lati B − A
\
e C − A sicché b = |B − A|, c = |C − A| e α = (B − A),
(C − A): concludiamo allora che
1
1
\
Area(ABC) = bc sin α = |B − A||C − A| sin (B − A),
(C − A) =
2
2
(8.2.6.2)
1
= |(B − A) × (C − A)|.
2
Per esempio se ci restringiamo a triangoli nel piano di vertici A = (xA , yA ), B = (xB , yB ),
C = (xC , yC ) otteniamo
xB − xA yB − yA ~k =
(B − A) × (C − A) = xC − xA yC − yA = ((xB − xA )(yC − yA ) − (xC − xA )(yB − yA ))~k ,
dunque si ottiene la formula, nota ad alcuni,
1 xB − xA
(8.2.6.3)
Area(ABC) = 2 xC − xA
x
yB − yA 1 A
=
x
yC − yA 2 B
xC
yA
yB
yC
1 1 .
1 LEZIONE 8
9
La Formula (8.2.6.3) è valida solo nel caso di triangoli nel piano: per triangoli nello
spazio non è corretta e si deve applicare la Formula (8.2.6.2) per ottenere il valore corretto
dell’area, come mostriamo nel seguente esempio numerico
Si considerino i punti A = (1, 1, 1), B = (2, −1, 3), C = (−1, 0, 1). Allora B − A =
~ı − 2~ + 2~k , C − A = −2~ı − ~ : tali vettori non sono proporzionali, quindi i tre punti non
sono allineati, dunque definiscono un triangolo. Poiché
1 −2 1 2
−2 2 ~
~
~ı − (B − A) × (C − A) = −2 0 ~ + −2 −1 k = 2~ı − 4~ − 5k
−1 0 si ha
Area(ABC) =
1
3√
1√
4 + 16 + 25 =
5.
|2~ı − 4~ − 5~k | =
2
2
2