11/03/2009
AZIONAMENTI ELETTRICI PER L'AUTOMAZIONE
Prof. Giuseppe Tomasso – Università di Cassino
Corso di Laurea in Ingegneria meccanica
TITOLO DEL CORSO:
AZIONAMENTI ELETTRICI PER L’AUTOMAZIONE
DOCENTE DEL CORSO
Prof. G. Tomasso
e-mail:
[email protected]
tel:
0776-2993730
Orario di ricevimento
lunedì-martedì-giovedì-venerdì (9:00-14:00)
Corso di Laurea
Ingegneria Meccanica (3° anno)
Numero di crediti
4
Corsi a scelta correlati
-Laboratorio di Azionamenti Elettrici
Testi consigliati
Appunti distribuiti dal docente
Slides del corso
(consultare il sito http://webuser.unicas.it/tomasso)
Modalità d’esame
presentazione relazioni scritte;
esame orale.
1
11/03/2009
Motore in cc ad eccitazione indipendente
•principio di funzionamento;
•modello matematico;
•caratteristiche stazionarie
•regolazione della velocità in regime
stazionario
•dominio di regolazione
•avviamento
•frenatura
4 settimane
4 settimane
Introduzione agli Azionamenti Elettrici
•struttura di un azionamento
elettrico;
•classificazione;
•settori di impiego.
Meccanica degli Azionamenti Elettrici
•richiami sulle equazioni del moto;
g
di trasmissione;;
•organi
•punto di lavoro e stabilità.
Richiami sulla conversione
elettromeccanica dell’energia
Azionamenti cc controllati in catena chiusa
•controlli in retroazione;
•regolatori industriali;
•controllo in cascata motore cc ad
eccitazione indipendente:
anello di corrente e velocità
Introduzione ai PLC
•struttura di un PLC
•programmazione di un PLC
Motore asincrono trifase
•modello matematico in regime stazionario;
•circuito equivalente
•caratteristiche stazionarie;
•avviamento;
•frenatura;
•regolazione della velocità.
Azionamenti in alternata
•controllo V/f motore asincrono;
controllo di scorrimento motore asincrono
•controllo
con isteresi;
Dimensionamento degli azionamenti elettrici
GLI AZIONAMENTI ELETTRICI: APPLICAZIONI
2
11/03/2009
Definizione di azionamento elettrico a velocità controllata (V. norma CEI C.642)
Sistema che converte energia elettrica in meccanica, con l’uso di apparecchiature elettroniche di potenza, in accordo con una funzione di comando (e secondo un programma definito)
AZIONE
AZIONAMENTI ELEETTRICI PER L’AUTOMA
Gli azionamenti elettrici
OMAZIONE
AZIONAMENTI ELETTRICI PER L’AUTO
Gli azionamenti elettrici
3
11/03/2009
OMAZIONE
AZIONAMENTI ELETTRICI PER L’AUTO
OMAZIONE
AZIONAMENTI ELETTRICI PER L’AUTO
4
11/03/2009
OMAZIONE
AZIONAMENTI ELETTRICI PER L’AUTO
5
11/03/2009
OMAZIONE
AZIONAMENTI ELETTRICI PER L’AUTO
6
11/03/2009
OMAZIONE
AZIONAMENTI ELETTRICI PER L’AUTO
OMAZIONE
AZIONAMENTI ELETTRICI PER L’AUTO
7
11/03/2009
OMAZIONE
AZIONAMENTI ELETTRICI PER L’AUTO
OMAZIONE
AZIONAMENTI ELETTRICI PER L’AUTO
8
11/03/2009
OMAZIONE
AZIONAMENTI ELETTRICI PER L’AUTO
9
11/03/2009
10
11/03/2009
11
11/03/2009
OMAZIONE
AZIONAMENTI ELETTRICI PER L’AUTO
12
11/03/2009
13
11/03/2009
GLI AZIONAMENTI ELETTRICI: GENERALITA' (PARTE 1)
OMAZIONE
AZIONAMENTI ELETTRICI PER L’AUTO
Gli azionamenti elettrici
14
11/03/2009
OMAZIONE
AZIONAMENTI ELETTRICI PER L’AUTO
Gli azionamenti elettrici
OMAZIONE
AZIONAMENTI ELETTRICI PER L’AUTO
Gli azionamenti elettrici
15
11/03/2009
OMAZIONE
AZIONAMENTI ELETTRICI PER L’AUTO
Gli azionamenti elettrici
OMAZIONE
AZIONAMENTI ELETTRICI PER L’AUTO
Gli azionamenti elettrici
16
11/03/2009
OMAZIONE
AZIONAMENTI ELETTRICI PER L’AUTO
Gli azionamenti elettrici
OMAZIONE
AZIONAMENTI ELETTRICI PER L’AUTO
Gli azionamenti elettrici
17
11/03/2009
OMAZIONE
AZIONAMENTI ELETTRICI PER L’AUTO
Gli azionamenti elettrici
Moto traslatorio
∑F =
i
i
dQ d ( mv )
=
dt
dt
F1
Fm − Fr =
dQ d ( mv )
=
dt
dt
F2
F3
Fm − Fr =
d ( v)
d (m)
dQ d ( mv )
=
=m
+v
dt
dt
dt
dt
se m = cost
Fm − Fr = m
d ( v)
dt
18
OMAZIONE
AZIONAMENTI ELETTRICI PER L’AUTO
Gli azionamenti elettrici: richiami sulla dinamica del moto
11/03/2009
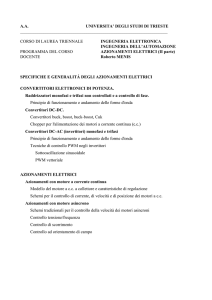
Moto rotatorio
Componente traslazionale
v = vG + ω × r
F1
Componente rotazionale
F2
G
M − ML =
F3
d (P)
dt
Proiettando sull’asse di rotazione a
Mm − Mr =
d (ω )
d (J )
dQ d ( J ω )
=
=J
+ω
dt
dt
dt
dt
Mm − Mr = J
d (ω )
dt
POTENZA E ENERGIA
ω
+
ML
Mm − ML = (J )
J
Pm
d (ω )
dt
ω M m − ω M L = Jω
PL
Potenza meccanica
in ingresso
Pm = PL + J ω
dω
dt
variazione di energia
cinetica immagazzinata
nelle masse rotanti
P
Potenza
t
meccanica
i
in uscita (sul carico)
t
t
t
0
0
Wm (t ) = ∫ Pm dτ = ∫ PL dτ + ∫ J ω
0
t
ω
0
0
dω
dt
dω
dτ
dτ
Wm (t ) = ∫ PL dτ + ∫ J Ωd Ω = WL (t ) +
1
Jω 2
2
19
OMAZIONE
AZIONAMENTI ELETTRICI PER L’AUTO
Gli azionamenti elettrici
Mm
OMAZIONE
AZIONAMENTI ELETTRICI PER L’AUTO
Gli azionamenti elettrici: richiami sulla dinamica del moto
11/03/2009
Albero rigido
Mm ω
+
ML
M m − M L = ( Jm + J L )
d (ω )
dt
Mm
= mm
Mn
motore
ML
= mL
Mn
carico
Ω
=ω
Ωn
mm − mL = Tm
dω
dt
Tm =
ω (s) =
( J m + J L ) Ωn
1
[ mm − mL ]
sTm
Mn
OMAZIONE
AZIONAMENTI ELETTRICI PER L’AUTO
Gli azionamenti elettrici
OMAZIONE
AZIONAMENTI ELETTRICI PER L’AUTO
Gli azionamenti elettrici
20
11/03/2009
motoriduttore
Mm
+
f2
M m − f 21Rm = J m
dω m
dt
− f12 RL + M L = J L
d ( −ω L )
dt
1
RL
Rm
ωm
f1
ML
ωL
2
f12 = f 21
ω m Rm = ω L RL
2
⎡
⎛ R ⎞ ⎤ dω
Rm
M L = ⎢ Jm + J L ⎜ m ⎟ ⎥ m
RL
⎢
⎝ RL ⎠ ⎥⎦ dt
⎣
2
⎛R ⎞
R
J eq = J m + J L ⎜ m ⎟
= m ML
RL
⎝ RL ⎠
Mm −
M L,eq
M m − M L,eq = J eq
OMAZIONE
AZIONAMENTI ELETTRICI PER L’AUTO
Gli azionamenti elettrici
dω m
dt
OMAZIONE
AZIONAMENTI ELETTRICI PER L’AUTO
Gli azionamenti elettrici
21
11/03/2009
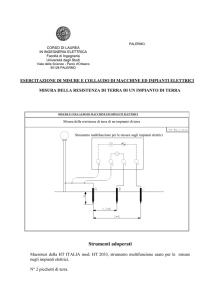
Impianto di sollevamento
pignone
v = ωr
Mm, ω
M L = Fr
⎛v⎞
J eq = m ⎜ ⎟
⎝ω ⎠
2
J tot = J p + J eq
F, v
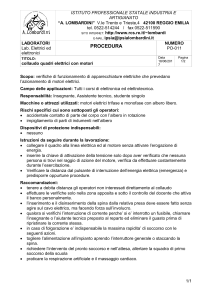
Impianto di sollevamento
Mm, ω
ascensore
pignone
(raggio r)
Fa
v = ωr
ML = F
Fr
⎛v⎞
J eq = m ⎜ ⎟
⎝ω ⎠
F v
F,
M m − ( M a − M c ) = J tot
dω
dt
2
J tot = J p + J eq
Fc
22
OMAZIONE
AZIONAMENTI ELETTRICI PER L’AUTO
Gli azionamenti elettrici: richiami sulla dinamica del moto
OMAZIONE
AZIONAMENTI ELETTRICI PER L’AUTO
Gli azionamenti elettrici
11/03/2009
Gli azionamenti elettrici: richiami sulla dinamica del moto
OMAZIONE
AZIONAMENTI ELETTRICI PER L’AUTO
Gli azionamenti elettrici: richiami sulla dinamica del moto
OMAZIONE
AZIONAMENTI ELETTRICI PER L’AUTO
Argano
23
11/03/2009
Carrucola e paranco
Carrucola fissa
24
OMAZIONE
AZIONAMENTI ELETTRICI PER L’AUTO
Gli azionamenti elettrici: richiami sulla dinamica del moto
11/03/2009
Carrucola mobile
Carrucola composta
25
11/03/2009
I sistemi di carrucole multiple sono anche
detti paranchi.
Pulegge
26
OMAZIONE
AZIONAMENTI ELETTRICI PER L’AUTO
Gli azionamenti elettrici: richiami sulla dinamica del moto
11/03/2009
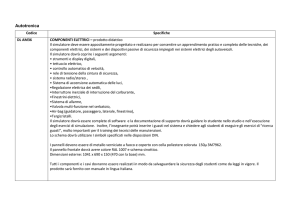
Vite senza fine
m
F, v
1
E = mv 2
2
⎛v⎞
J eq = m ⎜ ⎟
⎝ω ⎠
Jeq
M, ω
E=
M =F
v=
Δ
ωΔ
2π
⎛ Δ ⎞
J eq = m ⎜
⎟
⎝ 2π ⎠
27
M =F
v
ω
P = Mω
2
OMAZIONE
AZIONAMENTI ELETTRICI PER L’AUTO
Gli azionamenti elettrici: richiami sulla dinamica del moto
2
1
J eqω 2
2
Δ
2π
P = Fv
AZIONAMENTI ELETTRICI PER L’AUTO
OMAZIONE
Gli azionamenti elettrici: richiami sulla dinamica del moto
11/03/2009
OMAZIONE
AZIONAMENTI ELETTRICI PER L’AUTO
Gli azionamenti elettrici
Collegamento motore‐macchina operatrice
Punto di lavoro e stabilità
Punto di lavoro
M
Coppia resistente
Coppia motrice
ω
Coppia resistente
pp
M
Coppia motrice
pp
M
Coppia resistente
Coppia motrice
ω0
ω
ω0
28
ω
OMAZIONE
AZIONAMENTI ELETTRICI PER L’AUTO
Gli azionamenti elettrici ‐ collegamento motore‐macchina operatrice
11/03/2009
Lezione 2: Introduzione agli Azionamenti Elettrici - Meccanica degli Azionamenti Elettrici
Punto di lavoro e stabilità
Punto di lavoro
M
Coppia resistente
Coppia
pp motrice
ω
Coppia resistente
M
Coppia motrice
M
Coppia resistente
Coppia motrice
ω
ω0
Prof. Giuseppe
Tomasso
ω
ω0
Laurea in Ingegneria Elettrica: Corso di Azionamenti Elettrici I
Lezione 2: Introduzione agli Azionamenti Elettrici - Meccanica degli Azionamenti Elettrici
Modalità operative di un azionamento
ω−v
f
f
v
v
freno
motore
M-f
f
v
f
v
motore
Prof. Giuseppe
Tomasso
freno
Laurea in Ingegneria Elettrica: Corso di Azionamenti Elettrici I
29
11/03/2009
Lezione 2: Introduzione agli Azionamenti Elettrici - Meccanica degli Azionamenti Elettrici
Le caratteristiche del carico
L azionamento deve essere dimensionato in rapporto alle caratteristiche
L’azionamento
del carico. Oltre alla potenza e alla velocità massima, è necessario
conoscere:
• La caratteristica meccanica del carico (relazione tra velocità e coppia
assorbita)
• La esigenza di reversibiità (velocità unidirezionale o bidirezionale;
coppia motrice o frenante
(ovvero funzionamento su uno, due tre o quattro quadranti)
• Il ciclo di carico (carico costante, elevata coppia di spunto, carico
soggetto a punte intervallate da periodi di basso carico ecc.)
• Le prestazioni statiche(precisione) e dinamiche (rapidità di risposta)
Prof. Giuseppe
Tomasso
Laurea in Ingegneria Elettrica: Corso di Azionamenti Elettrici I
Lezione 2: Introduzione agli Azionamenti Elettrici - Meccanica degli Azionamenti Elettrici
Prof. Giuseppe
Tomasso
Laurea in Ingegneria Elettrica: Corso di Azionamenti Elettrici I
30
11/03/2009
Lezione 2: Introduzione agli Azionamenti Elettrici - Meccanica degli Azionamenti Elettrici
Prof. Giuseppe
Tomasso
Laurea in Ingegneria Elettrica: Corso di Azionamenti Elettrici I
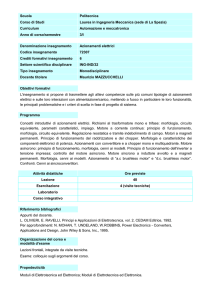
IL RISCALDAMENTO DELLE MACCHINE ELETTRICHE
31
11/03/2009
transitorio elettrico
i
motore
carico
Te
t
ω
transitorio meccanico
secondi
Te
10-4 – 10-1
Tm
10-3 – 10
TT
10 – 104
t
Tm
Θ
transitorio
i i termico
i
TT
Pm
Pd
Perdite a vuoto (B, ω)
Perdite a carico (i)
-isteresi;
-correnti parassite;
-attrito (cuscinetti, spazzole);
-ventilazione.
-effetto Joule;
-effetto
effetto pellicolare;
-addizionali.
32
t
IL RISCALDAMENTO DELLE MACCHINE ELETTRRICHE
Pe
IL RISCALDAMENTO DELLE MACCHINE ELETTRRICHE
Lezione 3: Riscaldamento delle macchine elettriche – Fenomeni transitori
11/03/2009
Y
A
E
B
F
H
C
Temperatura max [°C]
Sovratemperatura max [°C]
90
105
65
120
80
130
90
155
115
180
140
>180
temperatura ambiente di riferimento: 40°C
Y
A
E
B,F,H
cotone e carta non impregnati
cotone e presspan impregnati
resine epossidiche, materiali polivinilici
mica, fibre di vetro
Regola di Montsinger: la vita dell’isolante si dimezza in
corrispondenza di un superamento continuativo della temperatura
ammissibile di circa 8-9°C
macchina elettrica
Energia prodotta
IL RISCALDAMENTO DELLE MACCHINE ELETTRRICHE
Ipotesi:
•corpo omogeneo;
•sorgenti di calore uniformemente distribuite
•capacità di smaltimento uniforme sulla superficie esterna
IL RISCALDAMENTO DELLE MACCHINE ELETTRRICHE
CLASSE
Energia immagazzinata Energia scambiata per convezione
Equazione di equilibrio energeticoPdt
= Cdϑ + α Sϑ dt
P è lla potenza di
i
fi i di scambio
bi
dissipata
nell tempo d
dt attraverso lla superficie
S, C è la capacità termica del motore, ϑ la sovratemperatura rispetto a
quella ambiente, dϑ la variazione di temperatura che si produce nel
motore nel tempo dt, α il coefficiente di scambio termico per
convezione.
33
11/03/2009
P=C
ϑ (t ) = (ϑ0 − ϑ∞ )e
−
t
T
dϑ
+ Aϑ
dt
C
A
P
ϑ∞ =
A
T=
+ ϑ∞
se ϑ0 = 0
A =αS
ϑ
transitorio di riscaldamento
ϑ∞
−
t
ϑ (t ) = ϑ∞ (1 − e T )
T
ϑ (t ) = ϑ∞ e
−
t
T'
t
transitorio di raffreddamento
ϑ∞
t
T’
Generalmente T’ > T
valori di alcune costanti di tempo termiche
motori di piccola potenza
motori aperti a ventilazione forzata
motori chiusi a ventilazione forzata
motori ermetici
5-30 minuti
50-70 minuti
90-120 minuti
120-240 minuti
34
IL RISCALDAMENTO DELLE MACCHINE ELETTRRICHE
ϑ
IL RISCALDAMENTO DELLE MACCHINE ELETTRRICHE
Pdt = Cdϑ + α Sϑ dt
11/03/2009
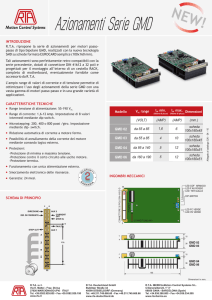
Servizio continuativo
Servizio di durata limitata
Servizio intermittente periodico
Servizio intermittente periodico con avviamento
Servizio intermittente periodico con frenatura elettrica
Servizio ininterrotto periodico con carico intermittente
Servizio ininterrotto periodico con frenatura elettrica
Servizio ininterrotto periodico con variazioni correlate di carico e velocità
Servizio con variazioni non periodiche di carico e velocità
TEMP.
θMAX
t
θMAX
t
tS < 3-4 T
tP > 3-4 T
CARICO
tP
t
PERDITE
CARICO
t
(S1) - Servizio continuo (S2) - Servizio di durata
limitata
tS > 3-4 T
tS
t
PERDITE
t
TEMP.
CARICO
PERDITE
t
tP
t
θMAX
t
IL RISCALDAMENTO DELLE MACCHINE ELETTRRICHE
tS
TEMP.
S1
S2
S3
S4
S5
S6
S7
S8
S9
9 tipi di servizio
IL RISCALDAMENTO DELLE MACCHINE ELETTRRICHE
Norme CEI 2-3, IEC 34-1
(S3) - Servizio intermittente
periodico
rapporto di
intermittenza
35
ts
ts + t p
11/03/2009
L’equivalenza viene determinata imponendo parità di sollecitazioni termiche fra la
macchina destinata ad un servizio non continuativo e quella equivalente.
Perdite a carico
Perdite a vuoto
⎛ I ⎞
Pp = k1Pn + k2 Pn ⎜ ⎟
⎝ In ⎠
IPOTESI:
2
Costanti k1 e k2, la capacità di
smaltimento del calore verso l’ambiente
e la costante di tempo termica vengono
considerate uguali per la macchina in
servizio non continuativo e per quella
equivalente.
ϑ
ϑ∞
ϑa
b
a
t
tc
Pn
Pd .l .
t
⎛
− ⎞
→ ϑ = ϑa ⎜ 1 − e T ⎟
⎜
⎟
⎝
⎠
t
⎛
−
→ ϑ = ϑ∞ ⎜ 1 − e T
⎜
⎝
( curva
⎞
⎟
⎟
⎠
( curva
a)
b)
Funzionamento con carico normale
Funzionamento con sovraccarico
36
IL RISCALDAMENTO DELLE MACCHINE ELETTRRICHE
Riduzione di un servizio di durata limitata
IL RISCALDAMENTO DELLE MACCHINE ELETTRRICHE
Riduzione di un servizio non continuativo al servizio continuativo equivalente
11/03/2009
⎜
⎝
per t =
tc
−
t
T
⎞
⎟
⎟
⎠
ϑa =
con
t
⎛
−
ϑ = ϑ∞ ⎜1 − e T
⎜
⎝
definendo q =
⎞
⎟
⎟
⎠
⎛
Pp,n
ϑ = ϑ∞ ⎜1 − e
⎜
⎝
A
ϑ
t = tc
Pp,n
Pp,n
A
Pp,d .l .
Pp ,n
q=
tc
T
A
⎞
⎟
⎟
⎠
ϑ∞
=
ϑa ⎛
1
⎜1 − e
⎜
⎝
−
tc
T
⎞
⎟
⎟
⎠
2
I t i considerando
Ipotesi:
id
d i valori
l i di tensione,
t
i
rendimento e (eventualmente) fattore di
potenza uguali per il funzionamento in regime
di d.l. e per quello in regime continuo
⎛P ⎞
k1 + k2 ⎜ d .l . ⎟
⎝ Pn ⎠
q=
( k1 + k2 )
−
Pp,d .l .
I d .l . Pd .l.
=
In
Pn
2
⎛
Pd .l .
k ⎞
k
= ⎜1 + 1 ⎟ q − 1
Pn
k2
⎝ k2 ⎠
Potenza
massima
sviluppabile dalla macchina
in servizio di d.l. per un
tempo tc
37
IL RISCALDAMENTO DELLE MACCHINE ELETTRRICHE
q=
⎞
⎟
⎟
⎠
ϑ∞ =
con
⎜
⎝
−c
Pp,d .l . ⎛
⎜1 − e T
A ⎜
⎝
⎛I ⎞
k1Pn + k2 Pn ⎜ d .l . ⎟
⎝ In ⎠
=
( k1 + k2 ) Pn
⎞
⎟
⎟
⎠
ϑa = ϑ∞ ⎜1 − e
t
=
t
T
⎛
= ϑa
Pp,d .l .
−
IL RISCALDAMENTO DELLE MACCHINE ELETTRRICHE
⎛
ϑ = ϑa ⎜1 − e
11/03/2009
IL RISCALDAMENTO DELLE MACCHINE ELETTRRICHE
RICHIAMI SUI CONCETTI DI BASE
38
11/03/2009
OMAZIONE
AZIONAMENTI ELETTRICI PER L’AUTO
Generalità sui sistemi elettromeccanici
OMAZIONE
AZIONAMENTI ELETTRICI PER L’AUTO
Generalità sui sistemi elettromeccanici
39
11/03/2009
OMAZIONE
AZIONAMENTI ELETTRICI PER L’AUTO
Generalità sui sistemi elettromeccanici
OMAZIONE
AZIONAMENTI ELETTRICI PER L’AUTO
Generalità sui sistemi elettromeccanici
40
11/03/2009
OMAZIONE
AZIONAMENTI ELETTRICI PER L’AUTO
Generalità sui sistemi elettromeccanici
OMAZIONE
AZIONAMENTI ELETTRICI PER L’AUTO
Generalità sui sistemi elettromeccanici
41
11/03/2009
OMAZIONE
AZIONAMENTI ELETTRICI PER L’AUTO
IL RELE'
OMAZIONE
AZIONAMENTI ELETTRICI PER L’AUTO
IL RELE'
42
11/03/2009
OMAZIONE
AZIONAMENTI ELETTRICI PER L’AUTO
Attuatori elettromagnetici
OMAZIONE
AZIONAMENTI ELETTRICI PER L’AUTO
Innesti elettromeccanici
43
11/03/2009
OMAZIONE
AZIONAMENTI ELETTRICI PER L’AUTO
I Motori elettrici
OMAZIONE
AZIONAMENTI ELETTRICI PER L’AUTO
I Motori elettrici – il motore in corrente continua
44
11/03/2009
OMAZIONE
AZIONAMENTI ELETTRICI PER L’AUTO
I Motori elettrici – il motore in corrente continua
OMAZIONE
AZIONAMENTI ELETTRICI PER L’AUTO
I Motori elettrici – il motore in corrente continua
45
11/03/2009
OMAZIONE
AZIONAMENTI ELETTRICI PER L’AUTO
I Motori elettrici – il motore in corrente continua
OMAZIONE
AZIONAMENTI ELETTRICI PER L’AUTO
I Motori elettrici – il motore passo‐passo
46
11/03/2009
OMAZIONE
AZIONAMENTI ELETTRICI PER L’AUTO
I Motori elettrici – il motore passo‐passo
OMAZIONE
AZIONAMENTI ELETTRICI PER L’AUTO
I motori elettrici: i motori in alternata
47
11/03/2009
OMAZIONE
AZIONAMENTI ELETTRICI PER L’AUTO
I motori elettrici: i motori in alternata
Vantaggi rispetto al
monofase:
-semplicità
costruttiva ed
efficienza di
generatori e motori
E1
O
E2
E3
+
1
I1
Z1
+
2
I2
Z2
+
3
I3
Z3
- risparmio di rame
N
Generatore
trifase (a stella)
Carico trifase
(a stella)
48
O’
OMAZIONE
AZIONAMENTI ELETTRICI PER L’AUTO
I motori elettrici: i motori in alternata
11/03/2009
OMAZIONE
AZIONAMENTI ELETTRICI PER L’AUTO
I motori elettrici: i motori in alternata
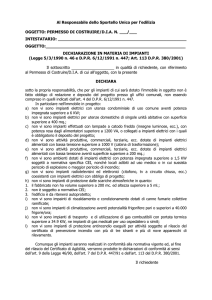
E1
+
400
300
O
E2
+
U12
200
E1(t)
E2(t)
E3(t)
E3
te
ensione [V]
100
+
0
-100
-200
E1 (t ) + E2 (t ) + E3 (t ) = 0
-300
-400
Tensione
concatenata U = 3E
0
0.2
0.4
0.6
0.8
1
1.2
1.4
tempo [normalizzato a T=20ms]
1.6
1.8
2
Andamento temporale dei generatori
Carico equilibrato:
E1
Z1 = Z2 = Z3
O
E2
+
1
I1
Z1
+
2
I2
Z2
+
3
I3
Z3
Potenza assorbita:
P = 3EI cos ϕ = 3UI cos ϕ
Potenziali di O e O’:
E3
N
VOO ' = 0
La rimozione del filo di neutro non
altera il funzionamento della rete.
49
O’
OMAZIONE
AZIONAMENTI ELETTRICI PER L’AUTO
I motori elettrici: i motori in alternata
11/03/2009
OMAZIONE
AZIONAMENTI ELETTRICI PER L’AUTO
I motori elettrici: i motori in alternata
OMAZIONE
AZIONAMENTI ELETTRICI PER L’AUTO
I motori elettrici: i motori in alternata
50
11/03/2009
OMAZIONE
AZIONAMENTI ELETTRICI PER L’AUTO
I motori elettrici: i motori in alternata
OMAZIONE
AZIONAMENTI ELETTRICI PER L’AUTO
I motori elettrici: i motori in alternata
51
11/03/2009
OMAZIONE
AZIONAMENTI ELETTRICI PER L’AUTO
I motori elettrici: brushless
OMAZIONE
AZIONAMENTI ELETTRICI PER L’AUTO
I motori elettrici: brushless
52
11/03/2009
OMAZIONE
AZIONAMENTI ELETTRICI PER L’AUTO
I motori elettrici: asincroni
OMAZIONE
AZIONAMENTI ELETTRICI PER L’AUTO
I motori elettrici: asincroni
53
11/03/2009
OMAZIONE
AZIONAMENTI ELETTRICI PER L’AUTO
I motori elettrici: asincroni
GLI AZIONAMENTI IN CONTINUA
54
11/03/2009
Va
Ia
Ra
E
Va = Ra I a + La
dI a
+E
dt
Ve = Re I e + N e
dΦ e
dt
J
La
dω
= M − ML
dt
E = kΦω
M = kΦI a
Ie
Φ = Φ e − Φ σ ,e
Ve
X(t)
t
regime stazionario
dI a
+E
dt
dΦ e
Ve = Re I e + N e
dt
dω
J
= M − ML
dt
Va = Ra I a + La
Va = Ra I a + E
M = ML
E = kΦω
M = kΦI a
55
UA
AZIONAMENTI ELETTRICI IN CONTINU
Gli azionamenti elettrici: azionamenti in cc
transitorio
UA
AZIONAMENTI ELETTRICI IN CONTINU
Gli azionamenti elettrici: azionamenti in cc
11/03/2009
UA
AZIONAMENTI ELETTRICI IN CONTINU
Gli azionamenti elettrici: azionamenti in cc
Va = Ra I a + E
M = ML
E = kΦω
M = kΦI a
ω=
Va
Ra
−
M
kΦ kΦ 2
b g
ω
Ia
macchina
non compensata
macchina
non compensata
ω0
macchina
compensata
macchina
compensata
M
M
dI a
+ kφω
dt
dω
kφ I a − M L = J
dt
ω
Va = Ra I a + La
ω0
ω=
ωn
Va
R
− a ML
kφ ( k )2
φ
Va = Ra I a + kφω
kφ I a = M L
M
ML,n
Ia
Ia,n
Ia =
V
R
ω = a − a 2 ML
kφ ( k )
φ
Ia =
ML
kφ
ML,n
56
ML
kφ
M
UA
AZIONAMENTI ELETTRICI IN CONTINU
Gli azionamenti elettrici: azionamenti in cc
11/03/2009
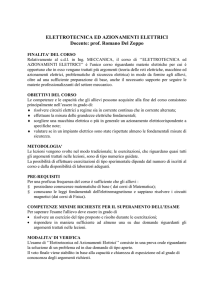
Variazione della tensione di armatura
ω
ω0
ω0
ω1
ω2
ω3
ω=
Va
R
− a 2 ML
kφ ( k )
φ
Va1
Va2<Va1
Va3<Va2
Va4<Va3
M
ML,n
Ia
Ia,n
Ia =
ML,n
Variazione della tensione
di armatura: spostamento del
punto di lavoro
ω
ω0
P2
ω0
ω1
P1
Va1
Va2
P3
M
ML,n
Ia
Ia,n
Ia =
ML,n
57
ML
kφ
M
M
SISTEMI DI MOVIMEENTAZIONE ELETTROMECCCANICI
Gli azionamenti elettrici: azionamenti in cc
ML
kφ
UA
AZIONAMENTI ELETTRICI IN CONTINU
Gli azionamenti elettrici: azionamenti in cc
11/03/2009
SISTEMI DI MOVIMEENTAZIONE ELETTROMECCCANICI
Gli azionamenti elettrici: azionamenti in cc
Variazione della resistenza
di armatura
ω
ω0
P1
ω0
ω1
ω=
Va
R
− a 2 ML
kφ ( k )
φ
Ra1
P2
Ra2
P3
M
ML,n
Ia
Ia,n
Ia =
ML
kφ
M
ML,n
Variazione del flusso di eccitazione
ω
ω1
ω0
P3
ωn
P1
V
R
ω = a − a 2 ML
kφ ( k )
φ
P2 φ2
φ1
M
ML,n
Ia
φ2
φ1
Ia
Ia,n
Ia =
ML,n
58
ML
kφ
M
UA
AZIONAMENTI ELETTRICI IN CONTINU
Gli azionamenti elettrici: azionamenti in cc
11/03/2009
Variazione del flusso di eccitazione
ω
Van = Ra I an + kφ nω n
ω1
ωn
Van = Ra I an + kφ 1ω1
kφ nω n = kφ 1ω1
M
ML,n
Ia
M n = kφ n I an
Ia,n
M 1 = kφ 1I an
Ia =
M nω n = M 1ω1 = costante
ML,1
ML,n
Dominio di regolazione
ω
deflussaggio
2
Va=Va_nominale
1
variazione della tensione
di armatura
M
59
ML
kφ
M
UA
AZIONAMENTI ELETTRICI IN CONTINU
Gli azionamenti elettrici: azionamenti in cc
UA
AZIONAMENTI ELETTRICI IN CONTINU
Gli azionamenti elettrici: azionamenti in cc
11/03/2009
OMAZIONE
AZIONAMENTI ELETTRICI PER L’AUTO
Gli azionamenti elettrici: azionamenti in cc
controllo in regime stazionario
ω∗
sistema di controllo
it
di
t ll
attuatore
tt t
motore
t
ω
ML
SI TRATTA DI UN CONTROLLO A CATENA APERTA
Vantaggi:
1. semplicità;
2. possibilità di regolazione senza un convertitore statico;
3. assenza di sensori.
Svantaggi:
1. bassa precisione;
2. basse prestazioni dinamiche;
3. perdita del controllo nella fase transitoria.
60
OMAZIONE
AZIONAMENTI ELETTRICI PER L’AUTO
Gli azionamenti elettrici: azionamenti in cc
11/03/2009
x(t)
Si utilizza una struttura di controllo a catena chiusa
t
transitorio
regime stazionario
ω∗
sistema di
controllo
ω
convertitore
Ia
dI a
+E
dt
dΦ e
Ve = Re I e + N e
dt
dω
J
= M − ML
dt
Va = Ra I a + La
OMAZIONE
AZIONAMENTI ELETTRICI PER L’AUTO
Gli azionamenti elettrici: azionamenti in cc
OMAZIONE
AZIONAMENTI ELETTRICI PER L’AUTO
Gli azionamenti elettrici: il regolatore PID
61
11/03/2009
I CONVERTITORI STATICI DI ENERGIA ELETTRICA
OMAZIONE
AZIONAMENTI ELETTRICI PER L’AUTO
Gli azionamenti elettrici: i convertitori
Convertitori DC/DC: il chopper
62
11/03/2009
OMAZIONE
AZIONAMENTI ELETTRICI PER L’AUTO
Gli azionamenti elettrici: i convertitori
Convertitori DC/AC: inverter
OMAZIONE
AZIONAMENTI ELETTRICI PER L’AUTO
Gli azionamenti elettrici: i convertitori
Convertitori AC/DC: raddrizzatori
63
11/03/2009
OMAZIONE
AZIONAMENTI ELETTRICI PER L’AUTO
Gli azionamenti elettrici: gerarchizzazione
SISTEMI DI MOVIMEENTAZIONE ELETTROMECCCANICI
Gli azionamenti elettrici: gerarchizzazione
64
11/03/2009
OMAZIONE
AZIONAMENTI ELETTRICI PER L’AUTO
Gli azionamenti elettrici: gerarchizzazione
OMAZIONE
AZIONAMENTI ELETTRICI PER L’AUTO
Gli azionamenti elettrici: gerarchizzazione
65
11/03/2009
OMAZIONE
AZIONAMENTI ELETTRICI PER L’AUTO
Gli azionamenti elettrici: gerarchizzazione
OMAZIONE
AZIONAMENTI ELETTRICI PER L’AUTO
Gli azionamenti elettrici: gerarchizzazione
66