Atomo di idrogeno, un approccio gruppale
Jacopo Nespolo∗
25 Marzo 2009
Sommario
In queste pagine saranno discusse le simmetrie dell’atomo di idrogeno,
il cui studio porta alla determinazione dei livelli energetici e della loro
degenerazione senza passare per l’equazione di Schrödinger. Sarà inoltre
discussa in dettaglio la determinazione delle rappresentazioni di SO(4).
1
Introduzione: degenerazioni e simmetrie
Cosı̀ come in meccanica classica, anche in meccanica quantistica le simmetrie
sono collegate a delle leggi di conservazione, che si traducono nella degenerazione
dei livelli energetici del sistema in esame.
L’Hamiltoniana per un atomo idrogenoide può essere scritta nella forma
H=
p2
Ze2
−
2µ
r
(1)
in cui µ è la massa ridotta del sistema nucleo-elettrone.
Definendo il momento angolare orbitale
L=q×p
Li = ijk qj pk
(i = 1, 2, 3)
è facile verificare che tutte le componenti di L commutano con H.
[Li , H] = 0
(2)
Ciò è dovuto all’invarianza per rotazioni dell’Hamiltoniana, in cui infatti compaiono solo quantità scalari, cioè all’invarianza dell’Hamiltoniana sotto
trasformazioni del gruppo SO(3), di cui le componenti del momento angolare
costituiscono i generatori infinitesimi.
L’uso di questo risultato, unitamente al teorema di degenerazione, spiega la
degenerazione rispetto agli autovalori m di una qualsiasi proiezione di L lungo
un asse, per esempio L3 , proiezione lungo l’asse z dei livelli energetici di un
qualsiasi sistema dotato di simmetria sferica. Non basta però da solo a spiegare
la degenerazione rispetto all’autovalore l di L2 , che sappiamo caratterizzare i
livelli dell’atomo di idrogeno.
∗ email:
j.nespolo AT gmail.com
1
Per questo dobbiamo cercare un’altra legge di conservazione e una classe
simmetria più ampia. Avendo esaurito le simmetrie geometriche del sistema,
ci aspettiamo che quest’ulteriore legge di conservazione dipenda dalla particolare forma dell’interazione Coulombiana che lega l’elettrone al nucleo, cioè una
simmetria di carattere dinamico.
A questo proposito ci viene in aiuto l’equivalente classico del nostro sistema.
2
Problema Kepleriano classico e vettore di RungeLenz
L’Hamiltoniana classica per una particella in un campo Kepleriano descritto dal
potenziale V = − κr , nel sistema di riferimento del centro di massa è
H=
p2
κ
−
2µ
r
nella quale si nota subito la parentela con l’Hamiltoniana (1) dell’atomo di
idrogeno, che si ritrova mediante la sostituzione κ = Ze2 .
Sappiamo dai corsi di Fisica 1 che una soluzione particolare delle leggi del
moto è data da un’orbita ellittica in cui il centro attrattore occupa uno dei due
fuochi.
H è indipendente dal tempo, dunque l’energia E è una costante del moto.
Inoltre H è invariante per rotazioni, perciò il moto si svolge su un piano e il
momento angolare è un vettore costante ortogonale al piano dell’orbita.
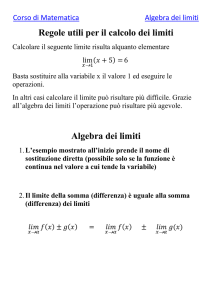
Le caratteristiche geometriche dell’orbita sono legate alle quantità dinamiche
del sistema. Indicando con
a ≡ semiasse maggiore
b ≡ semiasse minore
p
e ≡ eccentricità =
(a2 − b2 )
a
Figura 1: Orbita ellittica di una particella in un potenziale Kepleriano
si verifica che
E=−
κ
2a
L2 = µκa(1 − e2 ) = µκ
b2
.
a
L’invarianza per rotazioni è sufficiente a giustificare che le orbite siano contenute in un piano, ma non che siano chiuse. Infatti una piccola perturbazione
2
all’interazione (come per esempio la presenza di altri corpi celesti nel sistema
Terra-Sole) fa sı̀ che gli assi dell’ellisse precedano lentamente, aprendo l’orbita.
Questo ci suggerisce che ci sia un’altra quantità conservata che è legata
all’orientamento dell’orbita nel piano ortogonale a L. In nostro aiuto viene
un’altra costante del moto, il vettore di Runge-Lenz
M≡
p∧L κ
− r
µ
r
che è diretto dal centro attrattore al perielio dell’orbita. Si può verificare che
valgono le seguenti relazioni
L·M=0
2H 2
M2 =
L + κ2
µ
3
Vettore di Runge-Lenz quantistico
La definizione di M data in meccanica classica non può essere importata a
costo zero in meccanica quantistica, in quanto non darebbe vita a un operatore
Hermitiano, giacché L ∧ p 6= −p ∧ L. Ridefiniamo allora M come una media
simmetrica delle due scritture:
κ
1
(p ∧ L − L ∧ p) − r
2µ
r
2
p ri − (p · r)pi
κ
Mi =
− r.
µ
r
M=
Sfruttando il postulato di quantizzazione si calcolano facilmente le seguenti
relazioni
[M, H] = 0
L·M=M·L=0
2H 2
M2 =
(L + ~2 ) + κ2
µ
che sono gli equivalenti quantistici dei risultati classici della sezione precedente.
Tratteremo ora gli Mi come generatori infinitesimi di una trasformazione, cosı̀
come si fa con gli Li e le rotazioni spaziali.
4
Costruzione dell’algebra di M e L
Calcoliamo i 15 commutatori che costituiscono l’algebra generata da M e L:
[Li , Lj ] = i~ijk Lk
[Li , Mj ] = i~ijk Mk
2i~
[Mi , Mj ] = ijk
HLk .
µ
3
(3a)
(3b)
(3c)
La prima relazione da origine a un’algebra chiusa 1 , che sappiamo essere l’algebra
del ricoprimento del gruppo delle rotazioni SO(3). Tuttavia M e L insieme non
formano un’algebra chiusa, come possiamo vedere dalla (3c), in cui, oltre agli
operatori dell’algebra compare anche l’operatore Hamiltoniana.
Avendo però notato che H non dipende esplicitamente dal tempo e che
commuta con M e L, possiamo restringerci a un sottospazio degli stati del
sistema relativo a un determinato autovalore dell’Hamiltoniana2 . Cosı̀ in (3c)
possiamo sostituire all’operatore il suo autovalore e riguadagnare un’algebra
chiusa.
Per comodità definiamo
r
µ
M
A≡ −
2E
cosicché le (3c) diventano
[Ai , Aj ] = i~ijk Lk .
5
(4)
Il Gruppo SO(4)
Come abbiamo già osservato, i sei generatori A e L, a energia fissata E costituiscono un’algebra chiusa. Vediamo che tale algebra può essere identificata con
quella di SO(4).
Seguendo la trattazione di [1], possiamo scrivere le componenti di L come
Lij = qi pj − qj pi
i, j = 1, 2, 3
L = (L23 , L31 , L12 ) .
Estendiamo ora il nostro spazio a una quarta dimensione inventandoci dei
q4 e p4 tali che
A = (L14 , L24 , L34 )
e si verifica con un po’ di conti che le regole di commutazione (3a), (3b) e (4)
restano valide.
Il gruppo generato dai Ai e Lj è la generalizzazione a 4 dimensioni di SO(3),
cioè SO(4).
Notiamo che q4 e p4 sono coordinate fittizie e dunque la simmetria SO(4)
non corrisponde a una simmetria geometrica dell’atomo di idrogeno, bensı̀ a una
simmetria dinamica.
È importante comunque sottolineare che la simmetria geometrica SO(3) è
contenuta in SO(4) come sottogruppo.
I risultati fin qui descritti sono validi solo per autovalori discreti dell’energia,
mentre per gli stati di scattering le relazioni di commutazione devono essere
sostituite da altre, alle quali non siamo interessati per i nostri scopi. Per curiosità comunque, si può dimostrare che per gli stati di scattering sono verificate
le regole di commutazione dell’algebra di un gruppo di simmetria isomorfo al
gruppo di Lorentz in 3+1 dimensioni.
1 Commutatori
fra elementi dell’algebra portano ancora a elementi dell’algebra
realtà non è strettamente necessario restringersi a un autospazio dell’energia, in quanto abbiamo già osservato che il vettore di Runge-Lenz commuta con l’Hamiltoniana, e non
è dunque ambiguo dividere M per la radice di −H, evitando cosı̀ che questa compaia nei
commutatori (3c)
2 In
4
Ci accingiamo ora allo studio del gruppo SO(4), previo un breve rinfresco
della memoria su alcune nozioni che ci serviranno in seguito. Riprenderemo il
nostro problema della determinazione dei livelli energetici dell’atomo di idrogeno
nell’ultima sezione.
6
Preliminari alla determinazione delle rappresentazioni di SO(4)
In questa sezione ricorderemo brevemente alcuni concetti quali il teorema di
addizione dei momenti angolari, le definizioni di tensore sferico e di coefficiente
di Clebsch-Gordan e il teorema di Wigner-Eckart.
6.1
Addizione dei momenti angolari e coefficienti di ClebschGordan
Consideriamo un sistema composto: per semplicità e senza perdere di generalità prendiamo un sistema formato da due soli sottosistemi, per esempio due
particelle libere.
Detti R(1) e R(2) gli spazi rappresentativi dei singoli sottosistemi, lo spazio
del sistema composto è dato da
R = R(1) ⊗ R(2) .
Siano L(1) e L(2) gli operatori di momento angolare nei due sottosistemi, e
definiamo su tutto lo spazio l’operatore di momento angolare totale J
J ≡ L(1) ⊗ I(2) + I(1) ⊗ L(2)
Si vede a occhio che le componenti di J soddisfano alla regola di commutazione dei momenti angolari [Ji , Jj ] = i~ijk Jk . Abbiamo ora a disposizione
due basi per parametrizzare lo spazio R:
{|l1 m1 i ⊗ |l2 m2 i} = {|l1 m1 l2 m2 i}
(5a)
indotta dagli operatori L(1) e L(2) , e
{|jmi} = {|l1 l2 jmi}
(5b)
indotta dall’operatore di momento angolare totale.
Uno svantaggio della base (5a) è però che essa non è in generale una base
fisica, nel senso che non possiamo idealmente preparare il nostro sistema in uno
stato descritto da un solo vettore di base (i.e. non è detto che L(1),(2) commutino
con l’Hamiltoniana), mentre la base (5b) indotta da J è sovente una base fisica.
Ovviamente, dal punto di vista strettamente matematico, non c’è ragione per
preferire una base piuttosto che un’altra. Siamo quindi interessati al modo di
trascrivere il nostro spazio da una base all’altra.
Usando gli operatori di proiezione possiamo scrivere
X
|l1 m1 l2 m2 i =
|l1 l2 jmi hl1 l2 jm|l1 m1 l2 m2 i
jm
|l1 l2 jmi =
X
|l1 m1 l2 m2 i hl1 m1 l2 m2 |l1 l2 jmi .
m1 m2
5
I coefficienti di transizione
l1 l2 j
Cm
= hl1 m1 l2 m2 |l1 l2 jmi
1 m2 m
sono detti coefficienti di Clebsch-Gordan o di Wigner. I loro valori, determinati
per ricorrenza, sono tabulati e ne faremo ampio uso in seguito. Tali coefficienti
sono in particolare nulli se j 6= l1 + l2 , . . . , |l1 − l2 | e m 6= m1 + m2 .
6.2
Operatori tensoriali e teorema di Wigner-Eckart
Gli operatori tensoriali sono definiti dalla loro relazione con l’operatore di momento angolare.
Il più generale operatore tensoriale irriducibile 3 di rango j in componenti
(j)
sferiche T(j) è dato da un insieme di 2j + 1 operatori Tκ , κ = −j, −j +
1, . . . , +j tali che
h
i
J0 , Tκ(j) = κ~Tκ(j)
h
i p
(j)
J± , Tκ(j) = j(j + 1) − κ(κ ± 1)~Tκ±1
(usiamo indici greci per sottolineare che stiamo lavorando in componenti sferiche)
che usando i coefficienti di Clebsch-Gordan possono essere scritte entrambe nella
forma compatta
h
i p
(j)
µ = 0, ±1.
Jµ , Tκ(j) = j(j + 1) hjκ1µ|j, κ + µi ~Tκ+µ ,
Gli elementi di matrice degli operatori tensoriali godono di interessanti proprietà di fattorizzazione, enunciate nel seguente Teorema di Wigner-Eckart.
Teorema (di Wigner-Eckart). [2] Dato l’operatore tensoriale irriducibile T(J) ,
i suoi elementi di matrice tra autostati del momento angolare totale si possono
scrivere come
hj 0 m0 |Tκ(J) |jmi = hjmJκ|j 0 m0 i hj 0 kT(J) kji
dove hjmJκ|j 0 m0 i è l’appropriato coefficiente di Clebsch-Gordan e hj 0 kT(J) kji
è una quantità che dipende solo da j, j 0 , J e dalla particolare forma di T(J) , ma
non da m, m0 e κ, ed è detta elemento di matrice ridotto.
Un’importante conseguenza del teorema è che
hj 0 m0 |Tκ(J) |jmi = 0
per m0 6= m + κ,
(6)
j 0 6= J + j, . . . , |J − j|
in quanto è allora nullo il coefficiente di Clebsch-Gordan corrispondente.
È particolarmente importante, nonché utile per i nostri scopi, calcolare la più
generale forma di azione di un operatore vettoriale 4 V su un qualsiasi autostato
simultaneo di J e J0 . Usando gli operatori di proiezione e il Teorema di WignerEckart abbiamo
X
Vκ |jmi =
|j 0 m0 ihj 0 m0 |Vκ |jmi
j 0 m0
=
X
|j 0 m0 i hjm1κ|j 0 m0 i hj 0 kVkji
j 0 m0
3 Nella
4 Cioè
pratica ciò equivale a dire simmetrico e a traccia nulla.
un operatore tensoriale di rango 1
6
(7)
e per le condizioni di ortogonalità viste in (6) si ha che j 0 = j + 1, j, j − 1 e
m0 = m + κ. Si può ora sostituire nella formula precedente l’opportuno valore
tabulato dei coefficienti di Clebsch-Gordan.
7
Rappresentazioni dell’algebra del ricoprimento di SO(4)
In questa sezione determineremo tutte le rappresentazioni di SO(4).
L’algebra di SO(4) è definita dalle seguenti regole di commutazione:
[Li , Lj ] = iijk Lk
(8a)
[Li , Aj ] = iijk Ak
(8b)
[Ai , Aj ] = iijk Lk
(8c)
dove abbiamo scelto i nomi degli operatori non a caso, per sottolineare il legame
con il problema fisico di nostro interesse. La prima regola di commutazione
definisce l’algebra del ricoprimento di SO(3) (SU (2)), la seconda specifica che
A è un vettore sotto l’algebra delle rotazioni dello spazio tridimensionale e
l’ultima specifica che L e A assieme definiscono l’algebra del ricoprimento di
SO(4).
Quando è verificata quest’ultima regola di commutazione, gli elementi di
matrice di A assumono valori ben determinati, che ci accingiamo a calcolare.
Trovare tutte le rappresentazioni lineari dell’algebra di SO(4) significa infatti
trovare tutti gli operatori lineari in tutti gli spazi lineari che verificano le regole
di commutazione date.
Per i nostri scopi sarà sufficiente restringerci alla sottoclasse di quelle rappresentazioni il cui spazio di rappresentazione R contiene ciascun sottospazio
invariante di SO(3) Rl (l = 0, 12 , 1, . . .) al più una volta.
Prendiamo in ciascun sottospazio invariante una base sferica (nel caso fisico
dell’atomo di idrogeno sarà una base di armoniche sferiche, di cui prenderemo
in prestito la notazione)
l
Ym m=−l,...,+l ,
dim Rl = 2l + 1
Lo spazio totale è dunque generato dall’unione delle basi dei sottospazi invarianti
al variare di l in un insieme di valori da determinare. Segue che
M
R=
Rl .
l
Dalla meccanica quantistica conosciamo bene l’azione del momento angolare
L = (L0 = L3 , L+ , L− ) sulle armoniche sferiche:
L0 Yml = mYml
p
l
L+ Yml = (l − m)(l + m + 1)Ym+1
p
l
L− Yml = (l + m)(l − m + 1)Ym−1
Scriviamo anche l’operatore A nella base sferica
A0 = A3
A± = A1 ± iA2
7
e riscriviamo le regole di commutazione in questa base
[Lκ , Aκ ] = 0 ∀κ = +, −, 0
[L , A ] = ±2A
±
∓
0
[Li , Aj ] = iijk Ak −→
[A
,
L
]
=
±A
0
±
±
[A± , L0 ] = ∓A±
(
[A0 , A± ] = ±L±
[Ai , Aj ] = iijk Lk −→
[A+ , A− ] = 2L0
Trovare le rappresentazioni di SO(4) equivale a capire come gli Aκ agiscono
sui vettori Yml della nostra base sferica.
Applicando il teorema di Wigner-Eckart e usando i valori tabulati per i coefficienti di Clebsch-Gordan della forma hj, m − m0 , 1, m0 |jmi, possiamo sempre
scrivere (vedi (7)) l’azione delle Aκ sulle armoniche sferiche come
p
p
(9a)
A0 Yml = l2 − m2 cl Yml−1 − mal Yml − (l + 1)2 − m2 cl+1 Yml+1
p
p
l−1
l
l
A+ Ym = (l − m)(l − m − 1)cl Ym+1 − (l − m)(l + m + 1)al Ym+1 +
p
l+1
+ (l + m + 1)(l + m + 2)cl+1 Ym+1
(9b)
p
p
l−1
l
l
A− Ym = − (l + m)(l + m − 1)cl Ym−1 − (l + m)(l − m + 1)al Ym−1 −
p
l+1
− (l − m + 1)(l − m + 2)cl+1 Ym−1
(9c)
dove
hl − 1kAkli
cl = − p
l(2l + 1)
hlkAkli
al = − p
l(l + 1)
in cui compaiono gli elementi di matrice ridotti ai quali siamo interessati.
Per determinare gli al e cl applichiamo ambo i membri di [A+ , A0 ] = −L+ a
un generico vettore di base Yml . Dopo paginate di conti, imponendo l’uguaglianza dei coefficienti delle armoniche sferiche con indici uguali, si ottiene il sistema
[al (l + 1) − (l − 1)al−1 ] cl = 0
(10)
[al+1 (l + 2) − lal ] cl+1 = 0
2
2
2
(2l − 1)cl − (2l + 3)cl+1 − al = −1.
Partendo da un arbitrario vettore Yml e applicando ripetutamente L± si raggiunge tutto lo spazio Rl . Applicando ripetutamente gli Aκ si cambiano invece i
valori di l di 0, ±1, coprendo dunque tutti i sottospazi SO(3)-invarianti Rj ⊂ R
con j 6= l.
Notiamo che j > 0, in quanto autovalore dell’operatore definito positivo L2 .
Deve allora esistere un valore minimo per j, sia esso k. Allora, per la (9b), dato
k−1
che deve essere nullo il coefficiente di Ym+1 , sarà
ck = 0
8
e applicando ripetutamente Aκ si vede che lo spazio di rappresentazione è
M
R=
Rl
con l = k, k + 1, . . .
l
Per gli l tali che cl 6= 0 o cl+1 6= 0, le (10) implicano che
0 = al (l + 1) − (l − 1)al−1
(11a)
0 = al+1 (l + 2) − lal
(11b)
e con la sostituzione ρl = l(l + 1)al si ottiene il sistema
(
ρl − ρl−1 = 0
ρl+1 − ρl = 0
(12)
che comporta l’indipendenza di ρ da l, e quindi la sua costanza. Poniamo
allora ρ = kc, con c costante complessa (vedremo a breve che è sempre possibile
compiere questa fattorizzazione). Segue che
al =
kc
l(l + 1)
∀l ≥ k,
l ≥ 12 ,
∀c ∈ C
(13)
Nel caso in cui sia cl che cl+1 siano nulli, segue dall’ultima delle (10) che
(
k=l
k 2 c2
2
al = 2
= 1 =⇒
2
l (l + 1)
c = ±(l + 1)
dove per determinare il valore di k abbiamo tenuto conto della sua positività.
Sono cosı̀ determinati tutti gli elementi di matrice ridotti degli Aκ .
Vediamo che la fattorizzazione di k in (13) è sempre lecita: questo equivale a
dimostrare che al = 0 per ogni l per k = 0.
Per k = 0 si ha ρl = 0, che per (12) implica ρl−1 = 0, che è verificata per
l = 1 ⇒ a1 = 0.
Per l = 2 dalla (11a) si ha a2 · 3 − a1 · 1 = 0 ⇒ a2 = 0 e cosı̀ via per ogni l intero.
Per l = 0 i coefficienti di a0 in (9a) sono tutti nulli, quindi (13) vale per ogni
valore di l.
Per determinare i cl usiamo l’ultima delle (10) che, ponendo
σl = (2l + 1)(2l − 1)c2l
si riscrive
σl − σl+1 − a2l (2l + 1) = −(2l + 1)
σl − σl+1 = (2l + 1)[a2l − 1]
(2l + 1)k 2 c2
− (2l + 1)
l2 (l + 1)2
1
2 2 1
=k c
−
− (2l + 1)
l2
(l + 1)2
=
9
Calcoliamo, per k ≥ k, k ≥ 1
σk − σk =
k−1
X
σl − σl+1
l=k
k−1
X
1
1
−
−
(l + 1)
2
2
l
(l + 1)
l=k
l=k
1
1
2 2
− 2 − (k 2 − k 2 )
=k c
k
k2
(k 2 − c2 )(k 2 − k 2 )
=−
.
k2
= k 2 c2
k−1
X
Siccome ck = 0 ⇒ σk = 0 è dunque
(k 2 − c2 )(k 2 − k 2 )
k2
2
2
(l − c )(l2 − k 2 )
c2l = 2
l (2l + 1)(2l − 1)
σk =
(14)
l ≥ k, l ≥ 1.
(15)
Abbiamo cosı̀ trovato al variare di k e c tutti i possibili operatori L e A tali
che sono verificate le regole di commutazione (8) della nostra algebra. Abbiamo
cioè determinato, per ogni coppia (k, c) una rappresentazione dell’algebra del
ricoprimento di SO(4) nello spazio R = ⊕l≥k Rl .
In generale queste rappresentazioni non sono finito-dimensionali, e lo diventano solo per determinati valori di c. Infatti l’applicazione successiva di Aκ a
Yml porta a valori di l sempre maggiori, ammenoché non esista un valore di l, sia
esso k, tale che ck+1 = 0 che blocchi la catena ascendente. k è allora il massimo
valore di l in R. Per la (15) c deve essere tale che
2
c2 = (k + 1) .
Ricapitolando le restrizioni su (k, c), abbiamo che
(
k = 0, 21 , 1, . . .
c = ±(k + 1),
k = k, k + 1, . . .
determinano tutte e sole le rappresentazioni finito dimensionali di SO(4) nello
spazio di rappresentazione
k
M
R k, ±(k + 1) =
Rl
l=k
È importante notare che, nonostante R k, +(k + 1) e R k, −(k + 1) sono
lo stesso spazio vettoriale, gli Aκ agiscono in maniera
diversa nei due casi, e
quindi le rappresentazioni individuate da k, ±(k + 1) non sono equivalenti.
10
2
Dalla condizione c2 = (k + 1) segue che c2 è reale, e dunque c è reale o
puramente immaginario. Inoltre si ha che, se c è reale, lo è anche al , mentre cl
è immaginario puro, e viceversa per c ∈ C r R.
Definendo il prodotto scalare su R
0
0
Yml , Yml 0 = δ ll δmm0
che rende L2 un operatore Hermitiano in R(k, c), si può dimostrare con un
po’ di conti che A è Hermitiano solo se c è reale, e dunque solo se R è finitodimensionale. Ne concludiamo che le rappresentazioni irriducibili Hermitiane
di SO(4) sono tutte finito dimensionali.
8
Livelli energetici dell’idrogeno
Nello spazio di rappresentazione che abbiamo finalmente individuato, definiamo
i due operatori vettoriali
1
(L + A)
2
1
K = (L − A) .
2
I=
Essi soddisfano le relazioni di commutazione
[Ii , Ij ] = i~ijk Ik
[Ki , Kj ] = i~ijk Kk
[I, K] = 0 ,
[I, H] = [K, H] = 0.
Notiamo che sia I che K soddisfano le regole di commutazione del momento
angolare, cioè ciascuno genera un ricoprimento di SO(3), i.e. SU (2). Sfruttando
questa analogia con L otteniamo senza fatica gli autovalori di I2 e K2
sp(I2 ) = i(i + 1)~2
,
sp(K2 ) = k(k + 1)~2
dove i, k = 0, 12 , 1, . . .
Da quanto osservato è facile dedurre che SO(4) ha un algebra di rango 5 2, e
infatti SO(4) è isomorfo al prodotto diretto di due gruppi SU (2), o in formule
SO(4) ∼ SU (2) ⊗ SU (2)
e I2 e K2 sono due operatori di Casimir per l’algebra di SO(4).
Una scelta alternativa più conveniente per gli operatori di Casimir, che evidenzia anche alcune proprietà fisiche del sistema, è data da somma e differenza
di I2 e K2 :
1 2
L + A2
2
C 2 = I2 − K 2 = L · A
C1 = I2 + K2 =
5 Si
dice rango dell’algebra di un gruppo il massimo numero di generatori mutuamente
commutanti. Per il Teorema di Racah il rango equivale al numero di operatori di Casimir che
si possono costruire dai generatori dell’algebra
11
Per il Lemma di Schur 6 questi operatori sono multipli dell’identità sugli spazi
irriducibili della rappresentazione. Utilizzando le notazioni della sezione precedente si verifica infatti
~2 2
2
k + k + 2k I
C1 =
(16a)
2
(16b)
C2 = ~2 ±k(k + 1) I.
Nel caso in cui k = 0, e dunque anche C2 = 0 (condizione verificata nel
caso dell’atomo di idrogeno per l’ortogonalità del vettore di Runge-Lenz con il
momento angolare), si ha che i coefficienti al trovati nella sezione precendente
sono nulli per ogni l, e di conseguenza si ottiene la regola di selezione
hlkAkli =
0. In questo caso particolare le rappresentazioni k, ±(k + 1) sono equivalenti.
Da C2 = 0 segue che ci possiamo restringere alla parte di SO(4) in cui è
I2 = K2 , ovvero i = k. Gli autovalori di C1 ≡ C sono dunque7
sp(C) = 2k(k + 1)~2
k = 0, 21 , 1, . . .
(17)
Procedendo ora a ritroso con le definizioni troviamo che
C=−
µκ2
~2
−
4E
2
perciò
µκ2
~2
−
4E
2
µκ2
1
E=− 2
2~ 4k(k + 1) + 1
µκ2
1
=− 2
2~ (2k + 1)2
2k(k + 1)~2 = −
=
µκ2
2~2 n2
posto n = 2k + 1
Per la regola di composizione dei momenti angolari non c’è nessun problema
nel prendere i e k sia interi che semidispari. Inoltre il numero quantico l assume
correttamente solo valori interi, infatti
L=I+K
e
l = 2k = i + k = 0, 1, . . . , n − 1.
Perciò si ritrova il corretto intervallo di valori di l per n fissato e inoltre, avendo
Iz e Kz 2k + 1 = n autovalori indipendenti, si ha la corretta degenerazione
gn =
n−1
X
2k + 1 = n2
k=0
6 Lemma di Schur: [4] Ogni operatore che commuta con tutti gli operatori di una rappresentazione irriducibile (come nel nostro caso gli operatori di Casimir) è necessariamente un
multiplo dell’identità.
7 La relazione tra gli autovalori nella forma (17) e la forma (16a) è (2k+1)2 = (k+1)2 = n2 ,
da cui si vede anche immediatamente che k = n − 1.
12
Possiamo ritrovare la corretta degenerazione anche in maniera “più fisica”:
abbiamo già osservato che i vettori I e K generano ciascuno un’algebra SU (2).
Scriviamo allora l’operatore di “rotazione” che essi generano:
U (ϕi , ϕk ) = e−i(I·ϕi +K·ϕk ) = e−iI·ϕi e−iK·ϕk
dove la seconda uguaglianza è vera grazie al fatto che [I, K] = 0. Dal membro di
destra dell’equazione deduciamo che lo spazio di rappresentazione in cui opera
questo è il prodotto tensore degli spazi in cui vivono I e K, che hanno rispettivamente dimensione 2i + 1 e 2k + 1. La dimensione dello spazio prodotto è il
prodotto delle dimensioni dei suoi fattori, ed essendoci ristretti alla condizione
in cui i = k e avendo posto 2k + 1 = n otteniamo subito dim(Rn ) = gn = n2 .
Riferimenti bibliografici
[1] L. Schiff. Quantum Mechanics, 3rd Ed., McGraw-Hill, 1968.
[2] A. Bohm. Quantum Mechanics, Fundations and Applications, 3rd Ed.,
Springer-Verlag, 1993.
[3] E. Wigner. Group Theory and its application to the quantum mechanics of
atomic spectra, Academic Press, 1959.
[4] G.Cicogna. Metodi matematici della fisica, Springer, 2008
[5] A. Maggi. Istituzioni di fisica teorica B, appunti dal corso di Pietro Menotti,
edizione incompleta, Tortuga Publisher, 2001.
[6] M.Lupetti. Livelli energetici dell’atomo di idrogeno, 2009.
In memoria di Mariangela Marche e GianGiacomo Secchi.
c 2009 Jacopo Nespolo
Copyright Atomo di idrogeno, un approccio gruppale
by Jacopo Nespolo
is licensed under a Creative Commons Attribution-Share Alike 2.5 Italy
License
13