Scheda tecnica online
EFM50-2KF0A121A
EFS/EFM50
SISTEMI MOTOR FEEDBACK ROTATIVI HIPERFACE DSL®
EFM50-2KF0A121A | EFS/EFM50
SISTEMI MOTOR FEEDBACK ROTATIVI HIPERFACE DSL®
A
B
C
D
E
F
Informazioni per l'ordine
Tipo
Cod. art.
EFM50-2KF0A121A
Ulteriori esecuzioni degli apparecchi e accessori
1073496
www.sick.com/EFS_EFM50
L'immagine potrebbe non corrispondere
Dati tecnici in dettaglio
Grandezze caratteristiche relativamente alle tecniche di sicurezza
H
I
J
K
L
M
N
O
P
Q
R
S
T
Livello d'integrità di sicurezza
SIL2 (IEC 61508), SILCL2 (EN 62061) 1)
Idoneità sistematica
SC 3 (IEC61508)
Velocità di test
1 h
Velocità di richiesta max.
216 µs
Performance Level
PL d (EN ISO 13849)
Risoluzione orientata alla sicurezza
Canale 1 = 23 bit, canale 2 = 12 bit
PFHD: probabilità di guasto/h pericoloso
3,8 x 10^-8
Accuratezza orientata alla sicurezza
± 0,2°
1)
Per informazioni dettagliate sulla posa esatta della macchina/dell'impianto contattare la filiale SICK di competenza.
Prestazione
Risoluzione per rotazione
21 bit 4.096 bit
Numero di giri rilevabili in modo assoluto
4.096
Passo di misurazione per ciascuna rotazione
2.097.152
Rumore di segnale (σ)
± 2
Limiti di errore valore di posizione non linea- ± 45 1)
rità integrale in secondi di arco
Limiti di errore valore di posizione non linea- ± 7 1)
rità differenziale in secondi di arco
Precisione di sistema
± 52
Numero di giri max in sede di attivazione ov- ≤ 6.000 min⁻¹
vero reset del sistema di feedback del motore
Spazio di memoria disponibile
1)
2
8.192 Byte
Vedi note sulla scheda tecnica.
SISTEMI MOTOR FEEDBACK | SICK
Scheda tecnica online | 2017-06-07 19:32:09
Contenuti soggetti a modifiche senza preavviso
EFM50-2KF0A121A | EFS/EFM50
SISTEMI MOTOR FEEDBACK ROTATIVI HIPERFACE DSL®
Interfacce
Sequenza codice
Ascendente, alla rotazione dell’albero. In senso orario guardando in direzione "A" (vedere disegno quotato)
Interfaccia di comunicazione
HIPERFACE DSL®
Tempo di inizializzazione
Max. 500 ms 1)
Misurazione della resistenza alla temperatura
32-valore di bit, senza segno iniziale (1 Ω) 0 ... 209.600 Ω 2)
Spazio di memoria disponibile
8.192 Byte
1)
2)
Al raggiungimento di una tensione d’esercizio ammessa.
Senza tolleranza del sensore; a –17 °C ... +167 °C: NTC +-2K (103 GT); PTC+-3K (KTY84/130).
Dati elettrici
Campo della tensione di alimentazione
7 V ... 12 V
Tempo di accensione rampa di tensione
Max. 180 ms 1)
Corrente d'esercizio
Max. 150 mA 2)
Corrente di esercizio senza carico
≤ 150 mA
Frequenza di emissione valore di posizione
digitale
0 kHz ... 75 kHz
1)
2)
Durata della rampa di tensione tra 0 e 7,0 V, vedere diagramma “Consumo di corrente” alla sezione Diagrammi.
Utilizzando la commutazione in ingresso proposta come descritto nel manuale HIPERFACE DSL ® (8017595).
Dati meccanici
Tipologia albero
Albero conico
Tipo di flangia/limitatore di coppia
Limitatore di coppia
Dimensioni/quote
Vedere disegno quotato
Peso
0,2 kg
Momento d'inerzia del rotore
10 gcm²
Velocità di esercizio
≤ 9.000 min⁻¹
Accelerazione angolare
≤ 200.000 rad/s²
Coppia di avvio
≤ 0,4 Ncm
± 0,2 mm, 0,025 mm
± 0,95 mm, ± 0 mm
Movimento ondulatorio ammesso, radiale
± 0,2 mm
Movimento ondulatorio ammesso, assiale
± 0,95 mm
Durata dei cuscinetti a sfere
Vedere diagramma 3
Tipo di connessione
Cavo con connettore maschio, a 4 poli
Dati ambientali
Campo della temperatura d’esercizio
–30 °C ... +115 °C 1)
Campo di temperature immagazzinaggio
–40 °C ... +120 °C, senza imballaggio
Umidità relativa dell'aria/condensa
90 %, Condensa non ammessa
Resistenza agli urti
100 g, 6 ms, 6 ms (a norma EN 60068-2-27)
1)
La max. temperatura interna del trasduttore di 125 °C non deve essere superata. Per la misurazione della temperatura di lavoro si deve usare il punto di misurazione definito sull’encoder (vedere disegni quotati). Valori tipici per il riscaldamento proprio, vedere diagramma 4 (elettrico) e diagramma 5 (meccanico).
2)
Viene garantita l'EMC conformemente alle norme indicate se il sistema motor feedback con controconnettore inserito è collegato al punto di messa a terra centrale
del regolatore del motore mediante una schermatura del cavo. Se si utilizzano altri tipi di schermatura, l'utente deve eseguire propri test specifici.
2017-06-07 19:32:09 | Scheda tecnica online
Contenuti
soggetti a modifiche senza preavviso
SISTEMI MOTOR FEEDBACK | SICK
3
EFM50-2KF0A121A | EFS/EFM50
SISTEMI MOTOR FEEDBACK ROTATIVI HIPERFACE DSL®
EMC
Conforme a EN 61000-6-2, EN 61000-6-3 e IEC61326-3-1 2)
Grado di protezione
IP40, con controconnettore inserito e copertura chiusa (conforme a IEC 60529-1)
1)
La max. temperatura interna del trasduttore di 125 °C non deve essere superata. Per la misurazione della temperatura di lavoro si deve usare il punto di misurazione definito sull’encoder (vedere disegni quotati). Valori tipici per il riscaldamento proprio, vedere diagramma 4 (elettrico) e diagramma 5 (meccanico).
2)
Viene garantita l'EMC conformemente alle norme indicate se il sistema motor feedback con controconnettore inserito è collegato al punto di messa a terra centrale
del regolatore del motore mediante una schermatura del cavo. Se si utilizzano altri tipi di schermatura, l'utente deve eseguire propri test specifici.
Classificazioni
ECl@ss 5.0
27270590
ECl@ss 5.1.4
27270590
ECl@ss 6.0
27270590
ECl@ss 6.2
27270590
ECl@ss 7.0
27270590
ECl@ss 8.0
27270590
ECl@ss 8.1
27270590
ECl@ss 9.0
27270590
ETIM 5.0
EC001486
ETIM 6.0
EC001486
UNSPSC 16.0901
41112113
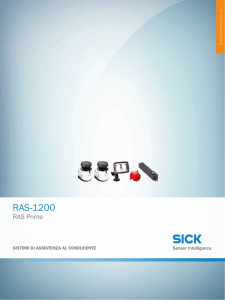
Disegno quotato (Quote in mm)
10
(0.39)
X
5±
0.12
)
3
6.3
3 (0.12)
Ø 50 (1.97)
(0.3
9.46
2°±
6.5 (0.26)
3 (0.12)
M4
Ø 50 ± 0.1 (1.97)
Ø 8 m6 (0.31)
Ø 5.5 h7 (0.22)
H
I
J
K
L
M
N
O
P
Q
R
S
T
Campo frequenze di resistenza alle vibrazio- 20 g, 10 Hz ... 2.000 Hz (a norma EN 60068-2-6)
ni
Ø 52.4 - 0.15 (2.06 - 0.01)
Ø 50.76 - 0.02 (2.00)
A
B
C
D
E
F
X
Y
Cylindrical screw Torx 15 head
1.5 +0.15 (0.06 +0.01)
2 +0.05 (0.08)
2.45 -0.2 (0.10 -0.01)
X = Measuring point for operaiting temperatur
Y = Measuring point for vibrations
4
SISTEMI MOTOR FEEDBACK | SICK
Scheda tecnica online | 2017-06-07 19:32:09
Contenuti soggetti a modifiche senza preavviso
EFM50-2KF0A121A | EFS/EFM50
SISTEMI MOTOR FEEDBACK ROTATIVI HIPERFACE DSL®
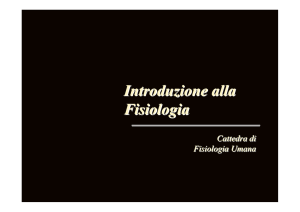
Disposizione PIN
Schema di collegamento alimentazione/comunicazione
1 2 3 4
Integrated in the motor cable = J, K
PIN
1
2
3
Signal
+US/DSL+
GND/DSL–
4
Explanation
not connected
Power supply/DSL-Data
Ground connection/DSL-Data
not connected
Recommended outer diameter of stranded cable: 4 mm +0/–0.3 mm
Recommended mating connector: JST (GHR-04V-S)
Schema di collegamento sensore di temperatura
2
1
PIN
1
Signal
T+
Explanation
Thermistor connection
2
T–
Thermistor connection (Ground)
Recommended outer diameter of stranded cable: 2.2 mm ± 0.1 mm
Recommended mating connector: Harwin M80-8990205
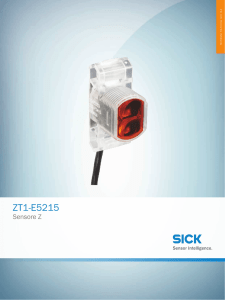
Diagrammi
Riscaldamento intrinseco elettrico
Diagram 3
Typ. mechanical self-heating, kelvin (K)
8
7
6
5
4
3
2
1
0
-40 -20
0
20
40
60 80 100 120 140
Ambient temperature (C°)
Electrical self-heating
2017-06-07 19:32:09 | Scheda tecnica online
Contenuti
soggetti a modifiche senza preavviso
SISTEMI MOTOR FEEDBACK | SICK
5
EFM50-2KF0A121A | EFS/EFM50
SISTEMI MOTOR FEEDBACK ROTATIVI HIPERFACE DSL®
A
B
C
D
E
F
Consumo di corrente
Diagram 2
Typ. current consumption (A)
4.0
3.5
3.0
2.5
2.0
1.5
1.0
0.5
0.0
0
H
I
J
K
L
M
N
O
P
Q
R
S
T
100
200
300
400
500
Time after switch-on (µs)
7V
8V
12 V
Il diagramma visualizza la corrente di inserzione
Riscaldamento intrinseco meccanico
Diagram 4
Typ. mechanical self-heating, kelvin (K)
24
21
18
15
12
9
6
3
0
0
3,000
6,000
9,000
12,000
Speed (rpm)
Mechanical self-heating
6
SISTEMI MOTOR FEEDBACK | SICK
Scheda tecnica online | 2017-06-07 19:32:09
Contenuti soggetti a modifiche senza preavviso
EFM50-2KF0A121A | EFS/EFM50
SISTEMI MOTOR FEEDBACK ROTATIVI HIPERFACE DSL®
Limiti di errore
Diagram 1
Angular seconds (")
30
20
10
0
0
+/- 0.05
+/- 0.1
Dynamic radial offset (mm)
Accessori consigliati
Ulteriori esecuzioni degli apparecchi e accessori
www.sick.com/EFS_EFM50
Breve descrizione
Tipo
Cod. art.
BEF-WK-RESOL
2039082
DOL-0B02-G0M2XC2
2079920
DSL-1202-G01MA
2061361
PGT-11-S LAN
1057324
PGT-11-S WLAN
1067474
Ulteriori accessori di montaggio
Servo morsetti, piccoli, per servoflangia (staffe di serraggio, eccentrico di fissaggio),
3 pezzi, senza materiale di fissaggio, senza materiale di fissaggio
Connettori e cavi
Testa A: Connettore femmina, Cavo conduttore, 4 poli, diritta
Testa B: Cavo
Cavo: HIPERFACE DSL ®, non schermato, 0,2 m
Testa A: Connettore femmina, M12, 4 poli, diritta
Testa B: Connettore femmina, JST, 4 poli, diritta
Cavo: HIPERFACE DSL ®, Schermato, 1 m
Strumenti di programmazione e configurazione
Tool di programmazione sVip® LAN per tutti i sistemi di feedback motore
Tool di programmazione sVip® WLAN per tutti i sistemi di feedback motore
2017-06-07 19:32:09 | Scheda tecnica online
Contenuti
soggetti a modifiche senza preavviso
SISTEMI MOTOR FEEDBACK | SICK
7
Scheda tecnica online
SICK in breve
SICK è una delle principali aziende produttrici di sensori e soluzioni per l'automazione industriale. Una
gamma di prodotti e di servizi unica costituisce la base perfetta per il controllo affidabile ed efficiente dei
processi per proteggere le persone da incidenti e per la prevenzione dei danni ambientali.
Abbiamo una vasta esperienza in svariati settori e ne conosciamo i processi e i requisiti. In questo modo con
sensori intelligenti siamo in grado di fornire ai nostri clienti esattamente ciò di cui hanno bisogno. Nei centri
applicativi in Europa, Asia e Nord America le soluzioni di sistema sono testate su misura e ottimizzate. Tutto
questo ci rende dei fornitori e partner di sviluppo affidabili.
A completamento della nostra offerta, proponiamo servizi globali: i SICK LifeTime Services garantiscono la
sicurezza e la produttività durante l'intero ciclo di vita della macchina.
Questo per noi è “Sensor Intelligence”.
Vicino a voi nel mondo:
Referenti e altre sedi
- www.sick.com
SICK AG |Waldkirch|Germany|www.sick.com