Università Federico II di Napoli
Facoltà di Scienze Matematiche Fisiche e
Naturali
Corso di laurea in Informatica
Fisica Sperimentale I
Gruppo 1
Docente Prof. Leopoldo Milano
Anno accademico 2003-2004
Diagramma di flusso della Meccanica
S
I
S
T
E
M
A
I
S
O
L
A
T
O
Studio Moti Rotatori
Soluzione
Problemi
di Meccanica
Equivalenza Lavoro
Energia
Studio Orbite
SISTEMA DI PUNTI MATERIALI E CORPO RIGIDO
Materia e sistema di punti materiali
La materia può essere pensata come costituita da particelle
(punti materiali). A seconda del tipo di particelle e della
interazione tra di esse si hanno materiali e stati di
aggregazione (solido, liquido e gassoso) diversi.
Oss. La materia è costituita da atomi. Gli atomi sono costituiti
da protoni, neutroni ed elettroni. I protoni ed i neutroni
sono costituiti da quark. Allo stato attuale della conoscenza
scientifica i quark e gli elettroni sono “particelle elementari”.
Massa totale di un sistema di N punti materiali
Datorun sistema di N particelle (punti materiali), indichiamo
con r i il vettore posizione della i-esima particella rispetto ad
un sistema di riferimento cartesiano Oxyz e con mi la massa
N
della i-esima particella. La massa totale
mi
del sistema è data da: m =
N
i =1
r
Il baricentro o centro di massa
m i ri
.
del sistema è il seguente v
i =1
r
=
G
vettore posizione:
m
Ne segue che la velocità e l’accelerazione del baricentro sono:
∑
∑
N
r
r drG
=
vG =
dt
r
∑mivi
i=1
m
N
r
2r
r
dvG d rG
= 2 =
aG =
dt
dt
r
∑ mi ai
i =1
m
Sistema di punti materiali :Centro di massa
m1x1 + m2x2 m1x1 + m2x2 m1x1 m2x2
=
=
+
xc ≡
m1 + m2
mT
mT
mT
N
∑ m ix i
Per sistemi con molti punti materiali:
x c ≡ i = 1N
Per sistemi multidimensionali si ripete per
∑mi
i =1
N
ogni coordinata: N
N
∑ m ix i
∑ miyi
∑ mizi
i =1
xc ≡ N
z c ≡ i =1N
y c ≡ i =1N
∑mi
∑ mi
∑m
i =1
i =1
i
i =1
Prima equazione cardinale della dinamica
Su ogni particella del sistema possono agire due tipi di forze:
1. i) forze interne: dovute alle altre particelle del sistema
2. ii) forze esterne: dovute a cause esterne al sistema
La II legge della dinamicardi Newton
per l’i-esima particella
r
r
(E)
(I )
si può
+ Fi = mi a i
r ( E )allora scrivere Fi
dove Fi rappresenta la somma vettoriale di tutter le forze
(I )
F
esterne agenti sulla i-esima particella, mentre i rappresenta la
somma vettoriale di tutte le forze interne agenti sulla i-esima
N
particella.
Sommando
sull’indice i si ottiene:
(I)
N
N
r (E )
r (I )
F
∑
r
per il terzo principio i =1 i = 0
∑ (Fi + Fi ) = ∑ m i a i
i =1
i =1
N
∑F
i =1
(E )
i
+
N
∑F
i =1
(I )
i
r
= maG
N
∑ Fi
i =1
(E )
r
= maG
prima equazione cardinale della dinamica
La prima equazione cardinale della dinamica
assicura che “il baricentro di un sistema si muove
con una accelerazione uguale a quella che avrebbe una
particella nella quale fosse concentrata tutta la massa del
sistema e sulla quale si supponga agire la risultante delle forze
esterne agenti sul sistema” (teorema del baricentro).
Introducendo il vettore quantità di moto totale del sistema
N
N
r
r
r
p = ∑ p i = ∑ m iv i
i=1
i=1
r (E )
la prima equazione cardinale si può scrivere F
r
dp
=
dt
Nel caso in cui la somma
delle forze esterne agenti
r
r ( E) vettoriale
sul sistema è nulla, F = 0 , ne segue che la quantità di moto
totale è un vettore constante
(teorema di conservazione della quantità di moto).
Seconda equazione cardinale della dinamica
Dalla II legge della
r dinamica
r di Newton per l’i-esima particella
Fi
(E)
+ Fi
(I)
r
= m ia i
Eseguendo il prodotto vettoriale dell’i-esimo vettore distanza
r
del
sistema
di
punti
masse
si
ottiene:
ri rispetto al baricentro
r
r
r
r
r
(E)
(I)
ri x(Fi + Fi ) = ri x m i a i
r r (E) r r (I) r
r
ri x Fi + ri x Fi r= ri x mr i a i
N r
N r
r
(E)
(I)
e sommando sull’indice i si ha :∑ ri x Fi + ∑ ri x Fi = ∑ ri x m i ar i
N
i =1
i =1
i =1
Poiché per il terzo principio della dinamica il momento
risultante della forze interne è zero, si ottiene :
r (E) N r
r
M = ∑ ri x m i a i
i =1
seconda equazione cardinale
della dinamica
Ricordando che il vettore momento angolare totale
r N r
N r
del sistema si esprime come: L = ∑ L i = ∑ ri x m i vr i
i =1
i =1
la seconda equazione cardinale può essere scritta come :
r (E)
M
r
dL
=
dt
La seconda equazione cardinale della dinamica assicura che
“la derivata rispetto al tempo del momento angolare totale di
un sistema è uguale al momento risultante delle forze esterne
agenti sul sistema” (teorema del momento angolare).
Nel caso in cui il momento
delle forze esterne agenti
r
r ( E ) risultante
sul sistema è zero, M
= 0 , ne segue che il momento
angolare totale è un vettore constante
(teorema di conservazione del momento angolare).
Energia di un sistema di punti materiali
L’energia cinetica totale T di un sistema di particelle
(punti materiali) è definita come la somma delle energie
cinetiche Ti delle singole particelle, cioè
N 1
N
2
T = ∑ Ti = ∑ m iv i
i =1 2
i =1
Il lavoro L(E) delle forze esterne sul sistema è definito come la
somma dei lavori Li(E) delle forze esterne su ogni singola
Bi r
N
N
r
(E)
(E)
(E)
particella, cioè
L
= ∑ L i = ∑ ∫ Fi
i =1
i =1
Ai
⋅ d ri
In modo analogo si introduce il lavoro delle forze interne sul
Bi r
N
N
sistema:
r
(I)
(I)
(I)
L = ∑ L i = ∑ ∫ Fi ⋅ d ri
i =1
i =1
Ai
Il teorema lavoro-energia cinetica dimostrato per una particella
può essere facilmente generalizzato per il sistema di N particelle
Teorema del lavoro-energia cinetica
La somma del lavoro delle forze esterne e del lavoro delle
forze interne del sistema è uguale alla variazione di energia
cinetica del sistema: L(E) + L(I) = ∆T.
Infatti il teorema lavoro-energia cinetica per la i-esima
particella si scrive:
Li = Li(E) + Li(I) = ∆Ti ;
sommando sull’indice i si ottiene il risultato cercato.
Sistemi conservativi
Il sistema è detto conservativo se le forze interne
sono
r (I)
conservative, cioè ad ogni forza interna F i è associata
una energia potenziale Ui , tale che Li(I) = −∆Ui(I).
L’energia potenziale totale U di un sistema conservativo è
definita come la somma delle energie potenziali Ui(I) delle
forze interne, cioè
N
U = ∑ Ui
i =1
r r
è detta V ( ri , rj )
(I)
1N
r r
= ∑ ∑ V ( ri , rj )
i =1 2 j =1
N
dove
energia potenziale di interazione
tra la particella i-esima e la particella j-esima.
L’energia meccanica totale di un sistema conservativo è
definita come la somma della energia cinetica delle
particelle e della energia potenziale delle forze interne .
N
E = T + U = ∑ ( Ti + U i
i =1
(I)
1
1 N N
r r
2
) = ∑ m i v i + ∑ ∑ V (ri , rj )
i =1 2
2 i =1 j=1
N
E’ immediato verificare che il teorema lavoro-energia
cinetica per un sistema conservativo diventa: L(E) = ∆E ,
cioè: “il lavoro delle forze esterne sul sistema è pari alla
variazione dell’energia meccanica del sistema”.
Un sistema è detto sistema isolato, se su di esso non
agiscono forze esterne e dunque L(E) = 0.
Ne segue che: “l’energia meccanica di un sistema
conservativo isolato è una costante del moto”
(teorema di conservazione dell’energia meccanica).
Corpo rigido: pura rotazione
Un sistema è detto corpo rigido se la distanza relativa tra le
particelle non varia nel tempo. Dunque un corpo rigido
conserva la sua forma durante il moto.
Consideriamo un corpo rigido che ruota attorno ad un asse
che passa per il suo baricentro. Prendiamo il baricentro come
origine del sistema di riferimento Oxyz e l’asse z come asse
di rotazione.
Ogni particella del corpo rigido si muove di
moto circolare
r
attorno all’asse z, cioè attorno al versore k = (0,0,1) .
La velocità della i-esima particellarè quindi data da
r
v
i
= ω rik
dove ω è la velocità (frequenza) angolare di rotazione.
La velocità angolare di rotazione è la stessa perr ogni particella
r
e si può definire come grandezza vettoriale: ω = ω k
Il momento angolare totale risulta dato da
r Nr
r N
r N
r N
2v
L = ∑ ri x mi vi = ∑ rimi vi k = ∑ rimi (ωri )k = ∑ miri ω
i =1
i =1
r
r
L = Iω
ovverosia
dove
N
i =1
i =1
I = ∑ m i ri è detto momento di inerzia del corpo rigido.
2
i =1
Il momento di inerzia del corpo rigido, che si misura in Kg m2 ,
dipende dunque dalla massa e disposizione spaziale delle
particelle. Dimensionalmente [I]=[ML2]
È possibile calcolare il momento di inerzia di alcuni
solidi omogenei dotati di simmetria.
Detta m la massa totale del corpo rigido, ecco alcuni risultati
nel caso in cui l’asse di rotazione passi per il baricentro:
2
I = mR
5
2
• sfera di raggio R:
1
• sbarra sottile di lunghezza L: I = mL
2
12
• disco sottile di raggio R:
I=
1
mR
2
2
Alla luce di queste considerazioni vediamo come si modifica
la seconda equazione cardinale della dinamica
r
r
Utilizzando la relazione L = I ω la secondar equazione
cardinale della dinamica, data da
diventa
r (E)
M
r
dω
=I
dt
r
M
(E )
dL
=
dt
Nel caso in cui il momentor risultante
delle forze esterne
r
agenti sul sistema è zero, M ( E ) = 0 , ne segue che il corpo rigido
ruota con velocità angolare costante.
1N
2
L’energia cinetica del corpo rigido è data da T = ∑ m i v i
2 i =1
Se il corpo rigido ruota attorno ad un asse che passa per il
baricentro, ricordando la relazione v i = ω r i , si ottiene
1N
1N
2
2 2
T = ∑ m i v i = ∑ m i ω ri
2 i =1
2 i =1
1 2
T = Iω
2
Corpo rigido: risultati generali
La trattazione generale del moto del corpo rigido è abbastanza
complessa. Enunciamo qui i risultati più significativi.
Il più generale moto di un corpo rigido è la combinazione di
- una rotazione
- una traslazione
Le equazioni cardinali della
r ( E ) dinamica
r di un corpo rigido
assumono la forma F
= maG
r
r (E)
dω
M =I
dt
e l’energia cinetica del corpo
1
1 r r
2
T = mv G + I ω ⋅ ω
rigido risulta data da
2
2
cioè la somma dell’energia cinetica di traslazione del baricentro
e dell’energia cinetica di rotazione attorno al baricentro.
Statica del corpo rigido
Abbiamo visto che le equazioni cardinali della dinamica dirun
r r (E)
dω
corpo rigido sono date da: r ( E )
F
= maG M
=I
dt
Da queste equazioni si ricava che affinché il corpo rigido non
trasli deve essere nulla
r vettoriale delle forze esterne
r ( Ela) somma
agenti su di esso: F
=0
Ma per avere un corpo rigido fermo questo non basta.
Infatti, affinché il corpo rigido non ruoti deve
r nullo il
r ( E )essere
momento risultante delle forze esterne: M
=0
equazioni cardinali della statica:
r (E) r
Fr = 0 r
(E)
M =0
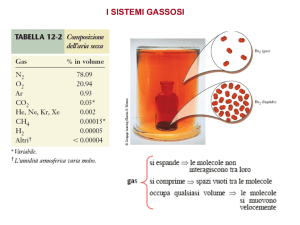
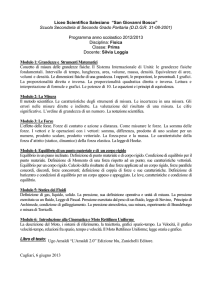
Es. In figura sono rappresentati due corpi, uno blu di massa
mB e distanza rB dal fulcro, ed uno rosso di massa mR e
distanza rR dal fulcro appoggiati su una asta rigida, di massa
trascurabile, appoggiata al fulcro grigio.
r
Le frecce indicano
la
forza
peso
m g agente sul corpo blu, la
r
g
forza peso m
r R agente sul corpo rosso e la forza di reazione
vincolare N dell’asta e dell’appoggio. Per l’equilibrio:
r r
B
r
r r r
mBg + mRg + T = 0
r
r r
r
rB x mBg + rR x mRg + 0 = 0
Dalla prima equazione cardinale: T = (mB + mR)g ,
dalla seconda equazione cardinale: rB mB = rR mR .
Corrispondenza tra grandezze di traslazione e di
rotazione
Traslazione
Massa m Posizione x
Velocità v
accelerazione a
II Legge Dinamica
F = ma
Energia cinetica ½ mv2
Rotazione
Momento di Inerzia I
Posizione angolare θ
Velocità angolare ω
accelerazione angolare α
II Legge Dinamica
τ=Iα
Energia cinetica ½ I ω2
Esercizi svolti sul corpo rigido
Es1. Una macchina lanciatrice di palline da tennis è posta in
uno stagno ghiacciato. La macchina lancia una pallina di 0,15
Kg orizzontalmente con una velocità di 36 m/s. Qual è la
velocità di rinculo della macchina se la sua massa è di 50 Kg?
Soluzione:
posto mp = 0,15 Kg , M = 50 Kg , vp =36 m/s , e detta v la
velocità di rinculo della macchina, poiché il sistema pallina e
macchina lanciatrice è isolato e lo stagno ghiacciato permette
di trascurare l’attrito, la quantità di moto totale del sistema,
che prima del lancio è zero, si conserva. Quindi:
mp vp – M v = 0 da cui
v = (mp/M) vp = (0,15 kg/50 kg) × 36 m/s =
= 0,11 m/s .
Es2. Una leva è incernierata in un punto distante 1/3 della
sua lunghezza da un estremo. Indicando con F1 e con F2
le due forze agenti, perpendicolarmente alla leva, ai due
estremi (F1 sul braccio più corto ed F2 sul braccio più lungo),
indicare il valore del rapporto F1/F2 affinché la leva sia in
equilibrio.
Soluzione:
detta L la lunghezza della leva, il modulo del momento della
forza F1 con punto di applicazione sul fulcro (cerniera) è dato
da M1 = (L/3) F1 , il modulo del momento della forza F2 con
punto di applicazione sul fulcro è dato da M2 = (2L/3) F2 .
Per l’equilibrio deve essere M1 = M2 e quindi
(L/3) F1 = (2L/3) F2 da cui F1/F2 = (2/3) / (1/3) = 2 .
Es3. Una leva è incernierata nel suo punto di mezzo. Su di
un braccio sono sospesi due corpi di masse 5 kg e 3 kg a
distanze dal fulcro di 75 cm e 120 cm, rispettivamente.
Calcolare la massa che, sospesa sull’altro braccio ad una
distanza di 100 cm, mantiene la leva in equilibri orizzontale.
Soluzione:
posto m1 = 5 kg , m2 = 3 kg , g = 9,81 m/s2 , L1 = 0,75 m ,
L2 = 1,2 m , L2 = 1 m , ed indicata con m3 la massa
incognita, il modulo del momento della forza peso agente
sulla i-esima massa risulta Mi = mi g Li , con i = 1,2,3 .
Per l’equilibrio deve essere M1 + M2 = M3
da cui m1 g L1 + m2 g L2 = m3 g L3 ed infine
m3 = (m1 L1 + m2 L2)/L3 = 7,35 kg .