Capitolo 3
GLI AZIONAMENTI ELETTRICI
1.1 Definizioni e struttura di un azionamento elettrico
Se nella conversione elettromeccanica dell'energia si desidera ottenere un'energia meccanica pregiata con
coppia e velocità controllabili si devono utilizzare gli azionamenti elettrici, cioè dei sistemi comprendenti,
oltre al motore elettrico, un sistema di conversione statica dell'energia elettrica, dei sensori e un sistema di
controllo. La loro attuale notevolissima importanza deriva dal fatto che consentono di ottenere prestazioni
altrimenti impossibili e di conseguire a livello industriale vantaggi in termini di produttività, precisione di
lavorazione e contenimento dei consumi energetici.
Si definisce azionamento elettrico un insieme di apparati che, interagendo fra loro, consentono
l’erogazione di una determinata potenza meccanica caratterizzata da valori di coppia e velocità pilotabili mediante segnali di comando esterni e la cui sorgente energetica è costituita da lavoro elettrico assorbito dalla rete alla quale essi sono connessi.
I campi di applicazione degli azionamenti elettrici sono svariati e caratterizzati da diverse esigenze di servizio; per farsene un’ idea, seppur sommaria, è sufficiente osservare i dati riportati nella Tab.1.1; è necessario
osservare che, grazie ai notevoli progressi che i componenti elettronici di potenza, “cuore” del controllo,
hanno avuto negli ultimi decenni, le modalità di implementazione di un azionamento elettrico sono sensibilmente migliorate rispetto a quanto accadeva in passato, sia dal punto di vista della “finezza” del controllo
che da quello dei livelli di potenza gestibili senza particolari problemi.
Applicazione industriale
Azionamento assi per macchine utensili
Azionamento mandrino per macchine utensili
Laminatoi e linee di trattamento siderurgiche
Macchine operatrici per la lavorazione di svariati materiali (plastiche, legno, cemento, vetro, ecc.)
Manipolatori di materiali, come sollevatori, ascensori,
gru, nastri trasportatori,ecc.
Movimentazione di fluidi (pompe, ventilatori,ecc.)
Servomeccanismi in genere (robot, puntamento di armi
e radar, ecc.)
Veicoli a trazione elettrica
Valori tipici di potenza (kW)
0,5÷5
3÷200
300÷10000
5÷200
5÷100
2÷1000
0,5÷100
20÷4000
Tab.1.1
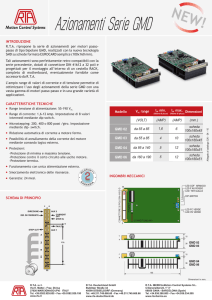
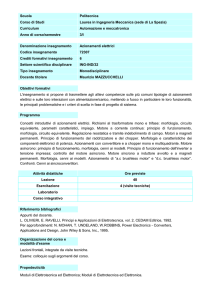
L’azionamento nel suo complesso presenta la struttura generica rappresentata in Fig.1.1; in essa è possibile
riconoscere le seguenti componenti:
Intelligenza locale: è il dispositivo che, attraverso un convertitore elettronico di potenza, controlla
l’attuatore in base ai segnali forniti dalla porta MMI;
38
Convertitore di potenza: è il dispositivo elettronico che interviene sulla potenza elettrica fornita
all’azionamento al fine di renderla utilizzabile per l’attuatore, sia dal punto di vista quantitativo (valori corretti di tensione e corrente) che da quello del controllo;
Attuatore: è il motore elettrico controllato mediante l’azionamento;
Porta elettrica: costituisce l’interfaccia fra l’azionamento e la rete elettrica di alimentazione; è importante rilevare che per l’azionamento sono da prevedersi tutti i tipi di funzionamento richiesti dalle
Norme, dunque tale porta deve essere dimensionata di conseguenza e deve comprendere anche i dispositivi atti alla protezione dell’azionamento (protezioni vere e propie ma anche, ad esempio, filtri
per armoniche, ecc.);
Porta meccanica: costituisce l’interfaccia fra l’azionamento ed il carico meccanico per cui è stato
progettato;
Porta della comunicazione (o MMI, “Man Machine Interface”): costituisce l’interfaccia fra i supervisori del processo e l’azionamento e deve permettere passaggio di informazioni nei due sensi (misure, segnali d’allarme; comandi non previsti in modo automatico);
Porta ambientale: costituisce l’interfaccia fra l’azionamento e l’ambiente in cui esso si trova; con il
termine “ambiente” si intende l’insieme di tutte le condizioni esterne nelle quali lavora l’attuatore e
tutti i vincoli ai quali esso è sottoposto, come: rumore dovuto alle vibrazioni, inquinamento elettromagnetico, polvere, ecc.
Supervisori
di processo
Segnali
Porta MMI
Intelligenza
locale
Rete
elettrica
Porta
ambientale
V, I
Porta
elettrica
Convertitore
di potenza
Attuatore
Porta
meccanica
C, Ω
Carico
Fig.1.1: Struttura fondamentale di un azionamento elettrico
39
1.2 Il carico meccanico
Ovviamente tutti i componenti devono essere correttamente dimensionati rispetto alle esigenze del carico; di
quest’ultimo è necessario conoscere:
Potenza meccanica richiesta (in W);
Velocità angolare di funzionamento (Ω, in rad/s o giri/minuto);
Caratteristica meccanica, ossia legame fra coppia (C, in Nm) e velocità angolare;
Esigenze di reversibilità, cioè su quali quadranti della caratteristica meccanica funziona il carico;
Ciclo di carico, ossia andamento temporale della coppia richiesta
Prestazioni statiche richieste (precisione, errori statici, ecc.);
Prestazioni dinamiche richieste (velocità di risposta, banda passante, ecc.).
Spesso il carico non è caratterizzabile esattamente come appena indicato; ad esempio, nel caso di azionamento di un vettore traslante (tipico dell’azionamento assi) è nota la velocità lineare richiesta, che andrà convertita in velocità angolare richiesta; successivamente si sceglierà il motore (attuatore) necessario, eventualmente
interponendo un opportuno moltiplicatore/riduttore.
1.3 Caratteristiche del carico, del motore e campo di operatività
Come già sottolineato nel paragrafo precedente, è necessario, per la progettazione dell’azionamento, essere a
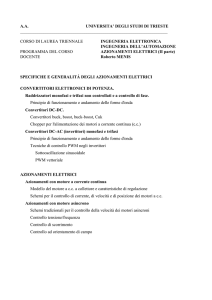
conoscenza della caratteristica meccanica del carico e delle sue esigenze di reversibilità. La caratteristica
meccanica è, come noto, il diagramma C/Ω (cfr. Fig.1.6); in condizioni di regime è possibile ricavare il punto di lavoro dell’azionamento semplicemente come intersezione fra la caratteristica meccanica del carico e
quella dell’attuatore. In condizioni dinamiche, invece, è necessario tracciare, per l’attuatore, il campo di operatività, ossia la zona del piano C/Ω entro cui esso può trovarsi a lavorare: il campo di operatività è l’insieme
dei possibili punti di lavoro dell’attuatore (Fig.1.7).
L’individuazione del campo di operatività è necessaria in quanto vincolante per ciò che riguarda la regolazione che l’azionamento è chiamato a svolgere, sia dal punto di vista qualitativo che quantitativo; esso viene
individuato, solitamente, in condizioni di servizio continuativo, ma è possibile rilevarlo anche per gli altri tipi di servizio previsti dalle Norme.
C
Carico
Motore
2
1
Ω
Punto di
funzionamento
3
1: azionamenti unidirezionali
1+4: azionamenti per trazione
1+2: azionamenti per sollevamenti
1+2+3+4: azionamenti per laminatoi, macchine utensili, ecc.
4
Fig.1.6: Caratteristiche meccaniche
40
3.1 Tipi di azionamenti.
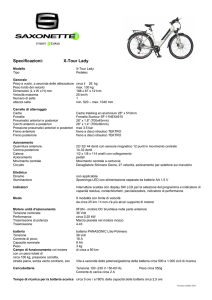
3.3.1 Azionamenti con catena aperta.
Tale tipo di controllo viene impiegato in quei casi in cui le caratteristiche statiche coppia-velocità del sistema
convertitore/motore sono compatibili con quelle del carico ed intrinsecamente stabili; ciò consente la connessione in cascata dei singoli componenti dell’azionamento, come indicato in Fig. 3.2.
Coppia resistente
Coppia d’attrito
Generatore
del
riferimento
Legge
di
controllo
Convertitore
Motore
Carico
Catena diretta
Figura 3.2 - Schema a blocchi di azionamento controllato in catena aperta.
Un controllo di questo tipo presenta l’indiscutibile vantaggio di non necessitare di trasduttori di misura né
altre strumentazioni di misura analoghe che consentano il costante controllo delle grandezze controllate, tipicamente posizione e velocità; la precisione statica, ossia la differenza fra il valore desiderato e quello effettivo a regime, dipende dalla pendenza delle caratteristiche statiche. Le cause di imprecisione sono dovute al
fatto che una qualsiasi perturbazione agente sull’asse motore modifica la velocità di rotazione, senza nessuna
possibilità di correzione; inoltre la precisione ottenibile è limitata dalle incertezze sulla conoscenza delle caratteristiche di coppia, dovute al fatto che i vari parametri in gioco non sono costanti nel tempo.
3.3.2 Azionamenti con catena chiusa.
Essi presentano lo schema a blocchi di Fig. 3.3: sono caratterizzati dal fatto che le grandezze controllate (posizione e/o velocità) sono costantemente monitorate mediante opportuni trasduttori, posti sull’anello di retroazione. Si ottiene dunque un segnale proporzionale al valore della grandezza d’uscita e dello stesso tipo
del segnale in ingresso, in quanto in ingresso alla catena diretta (la stessa di Fig. 3.2) si presenta un segnale
dato dalla differenza fra il segnale di riferimento e quello attuale delle variabili controllate, comunemente
detto segnale d’errore.
Controlli di questo tipo presentano comportamenti molto precisi a regime e, solitamente, anche in condizioni
dinamiche.
41
Generatore
del
riferimento
Catena diretta
Trasduttori
Figura 3.3 - Schema a blocchi di azionamento controllato in catena chiusa.
3.3.3 Azionamenti con catena chiusa e catena di azione diretta.
Oltre alla catena di retroazione, si prevede in questo caso una catena di azione diretta, avente il compito di
correlare il segnale di riferimento con quello in ingresso al convertitore (Fig. 3.4). Tale schema di controllo
viene impiegato in quei casi in cui le specifiche sono molto spinte; diviene necessario, in luogo del generatore del segnale di riferimento, prevedere un dispositivo per l’elaborazione in tempo reale della legge di moto:
in tal modo si realizza un miglior coordinamento fra le grandezze controllate, nel rispetto dei limiti di coppia
e velocità del sistema convertitore/motore e della relativa rigidezza meccanica.
Qualora, in un azionamento con catena chiusa ed azione diretta, oltre che ottenere buone prestazioni a regime
si voglia anche migliorare il rendimento dell'attuatore, è necessario prevedere anche dei controlli di flusso/coppia o coppia/velocità; tale tipo di controllo richiede che le grandezze di comando del convertitore siano tali da realizzare in tempo reale le leggi di moto desiderate.
Catena ad
azione diretta
Coppia resistente
Coppia d’attrito
Generatore
del
riferimento
Legge
di
controllo
Convertitore
Motore
Carico
Trasduttori
Figura 3.4 - Schema a blocchi di azionamento controllato in catena chiusa e catena di azione diretta.
42
Gli azionamenti in corrente continua sono stati i primi ad essere sviluppati e sono tuttora molto diffusi per
la semplicità ed economicità del controllo e per le ottime prestazioni dinamiche del motore. La presenza del
commutatore meccanico comporta però manutenzioni periodiche, limiti di velocità, limiti ambientali e maggiore costo ed inerzia del motore.
Gli azionamenti in corrente alternata, la cui diffusione è iniziata a seguito dei notevoli progressi tecnologici verificatisi nel campo dell’elettronica industriale, sono caratterizzati rispetto a quelli in corrente continua
da:
maggiore robustezza ed economicità del motore;
manutenzione praticamente nulla;
utilizzabilità in qualsiasi tipo di ambiente;
più elevata velocità massima e minore inerzia.
Il convertitore e l’unità di controllo sono però più complessi e costosi, specie nel caso di azionamenti ad alta
dinamica.
Gli azionamenti brushless presentano i pregi ma non gli inconvenienti tipici degli azionamenti in corrente
continua, connessi alla presenza del commutatore meccanico: essi sono quindi particolarmente adatti per le
applicazioni che richiedono elevate prestazioni dinamiche.
Gli azionamenti con motori passo-passo rappresentano invece la soluzione ideale quando si desidera ottenere posizionamenti veloci e precisi e le potenze in gioco sono modeste ( 1 KW)
In ambito industriale sono impiegati anche:
-
azionamenti idraulici (la cui sorgente primaria di energia é costituita da una pompa idraulica) caratterizzati da semplice struttura, elevata affidabilità, facilità di controllo di coppia, velocità e posizione
ed alti livelli di coppia, ma che comportano perdite d'olio, rumore e problemi alle alte velocità;
-
azionamenti pneumatici (la cui sorgente primaria di energia é costituita da un serbatoio di aria
compressa) caratterizzati da assenza di problemi di inquinamento ambientale e di pericoli di incendio
e di esplosione, ma che presentano bassi rendimenti e difficoltà di controllo di velocità e posizione a
causa della compressione dell'aria.
43