Veicoli Elettrici e Ibridi
Introduzione
Cos'è per noi un veicolo
Il termine veicolo viene associato ad un sistema ingegneristico il cui scopo primario
è il movimento da un posto ad un altro, con trasporto di carico utile.
Tralasciamo però i veicoli elementari, quali veicoli a braccia, a trazione animale, velocipedi.
La funzione del veicolo deputata alla generazione della potenza necessaria per la
sua movimentazione è denominata propulsione. Viene distinta nelle fasi di trazione
(potenza meccanica generata positiva) e frenatura (potenza meccanica generata
negativa, cioè in realtà assorbita).
Tutti i carichi (=sottosistemi che per funzionare necessitano di potenza) che non
sono direttamente connessi con l'apparato propulsivo sono detti carichi ausiliari. Ad
esempio l'illuminazione (interna ed esterna), l'infotainment, i sistemi dei regolazione
dei sedili, ecc. sono carichi ausiliari.
VEI: Introduzione
2
Cos'è per noi un veicolo (2)
Il termine veicolo viene associato ad un sistema ingegneristico il cui scopo primario
è il movimento da un posto ad un altro, con trasporto di carico utile.
Rientrano in questa definizione vari tipi di veicolo:
- veicoli terrestri a guida non vincolata: ciclomotori, motoveicoli, autoveicoli
(autovetture, autobus, autocarri, ecc.
- veicoli a guida vincolata, quali tram, filobus, treni
- imbarcazioni
- veicoli aerei
Molte delle considerazioni che svolgeremo si possono applicare a tutti i tipi di veicoli.
Una differenza fondamentale fra essi è la seguente:
- veicoli filoalimentati (filobus, tram, treni)
- veicoli energeticamente autonomi (gli altri: ciclomotori e motoveicoli, autoveicoli,
navi, ecc.)
VEI: Introduzione
3
Le tre grandi aree ingegneristiche
Le grandi aree ingegneristiche da definire e dimensionare nella progettazione di un
veicolo, come per qualsiasi sistema ingegneristico sono:
- area strutturale. Riguarda la struttura meccanica di sostegno delle parti. Essa è
caratterizzata d parametri quali resistenza meccanica, rigidezza, resistenza a fatica,
che non implicano particolari flussi di energia o di informazione
- area energetica. Riguarda la trasformazione di energia a bordo per convertire
quella presente alla partenza (ad es. in un serbatoio di combustibile fossile o in un
accumulatore elettrochimico) in energia utile: energia meccanica alle ruote per la
propulsione, luminosa per l'illuminazione, elettromagnetica per le tele comunicazioni
ecc.
- area dell'informazione. Riguarda le funzioni informative (sistema GPS, apparati
radio) e di controllo (ad esempio l'attuazione dei comandi del pilota, soprattutto
quelli dei pedali del freno e dell'acceleratore, ma anche il cruise control e simili)
Può essere utile al fine un parallelismo con i corpo umano: il sistema scheletrico svolge
prevalentemente la funzione strutturale, l'apparato motorio (con la fornitura di energia
attraverso l'apparato digerente) la produzione di energia meccanica, il sistema nervoso per
l'informazione, cioè il controllo e il pilotaggio di tutti gli apparati, anche quelli sensoriali
VEI: Introduzione
4
Lo schema di riferimento
Nel presente corso si trascura l'area ingegneristica strutturale del veicolo, mentre si
analizzeranno le altre due. Pertanto lo schema di riferimento è il seguente.
Vista la funzione fondamentale del veicolo di generare potenza meccanica per il movimento,
essa è considerata potenza utile, mentre l'energia che non produce potenza utile per il
movimento è considerata dispersa.
Ruote
motrici
Energia
per la
propulsione
Power Train
control
comandi
Energia
dispersa
Visualizzazioni
Pilota
Energia
per i carichi
ausiliari
VEI: Introduzione
comandi
Visualizzazioni
control
Sistemi ausiliari
Energia
dispersa
5
Lo schema di riferimento
La parte superiore dello schema è relativa alla funzione propulsiva, mentre quella
inferiore alle altre funzioni: funzioni ausiliarie.
Entrambe le parti hanno un sottosistema per il controllo, che interagisce con il
pilota, attuando i suoi comandi e visualizzando lo stato del sistema.
Ruote
motrici
Energia
per la
propulsione
Power Train
control
comandi
Energia
dispersa
Visualizzazioni
Pilota
Energia
per i carichi
ausiliari
VEI: Introduzione
comandi
Visualizzazioni
control
Sistemi ausiliari
Energia
dispersa
6
Lo schema di riferimento
La parte superiore dello schema è relativa alla funzione propulsiva, mentre quella
inferiore alle altre funzioni: funzioni ausiliarie.
Entrambe le parti hanno un sottosistema per il controllo, che interagisce con il
pilota, attuando i suoi comandi e visualizzando lo stato del sistema.
La potenza trasferita alle ruote è bidirezionale: positiva durante le accelerazioni ella
marcia a velocità costante, negativa durante le frenate.
P
Energia
per la
propulsione
Ruote
motrici
Power Train
control
comandi
Energia
dispersa
Visualizzazioni
Pilota
Energia
per i carichi
ausiliari
VEI: Introduzione
comandi
Visualizzazioni
control
Sistemi ausiliari
Energia
dispersa
7
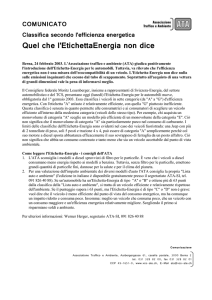
Veicolo a propulsione convenzionale
In questo schema si evidenzia solo l'area energetica. Alcune osservazioni:
●
La potenza non risale il sistema ruote-freni, per incapacità dell'ICE (=Internal
Combustion Engine) di assorbirla. Quando Pm è negativa essa viene assorbita da
MB (=Mechanical brake) In realtà un certo assorbimento dall'ICE si ha per le
perdite di pompaggio, le quali danno il cosiddetto freno motore
●
La potenza per gli ausiliari viene prelevata tramite la PTO dall'ICE, mediante
conversione nell'EG (Electricity Generator)
Power train
Pm
all
P
energy
Fuel tank
ICE
PTO
(power take-off)
Auxiliary
power
supply
VEI: Introduzione
Transmiss.
MB
Mechanical
Aux systems
EG
Elec. Auxiliary Systems
8
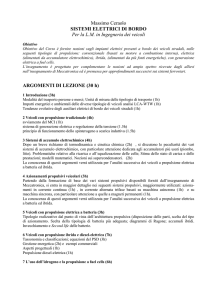
Veicolo a propulsione elettrica (a batteria)
In questo schema si evidenzia solo l'area energetica. Alcune osservazioni:
● La potenza P
può esser negativa, e parzialmente riconvertita in elettrica dall' Electric
m
●
●
Drive e convogliata nella batteria
batteria sta erogando; la freccia bidirezionale indica che Pbatt può anche essere negativa
L'Electric Drive è composto da convertitore (Electronic Power Converter) e motore
CONVENZIONE: le frecce unidirezionali sottili sulle connessioni fisiche (come quella
verso gli ausiliari) indicano i versi di riferimento*; le frecce spesse sopra o sotto le
connessioni fisiche indicano possibilità di bidirezionalità o meno
Power train=electric drive
Pbatt
Battery
Pp
P
EPC
Motor
T
Paux
* se Pp>0 la
potenza Pp fluisce
nel verso indicato,
altrimenti nel
verso opposto
Auxiliary Systems
VEI: Introduzione
9
Diagrammi fisici e di segnale
fuel
+
ICE
fuel
G
Primary
Converter
M
-
Pu
P1
Power Train
+
+
P2
Storage
System
Il diagramma superiore è di tipo fisico, in quanto indica connessioni di oggetti; quello
inferiore è di segnale. I segnali sono sempre orientati (dotati di frecce). Essi possono
essere trattati in vario modo, ad esempio sommati in nodi sommatori
(gli schemi riportati sono relativi all'apparato propulsivo di veicoli ibridi serie che verranno
studiati nel seguito)
VEI: Introduzione
10
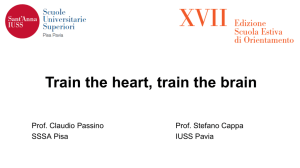
Diagrammi fisici e di segnale (2)
Note sui diagrammi:
Schemi spesso contengono sia parti fisiche che di segnale
La distinzione fra diagrammi fisici e di segnale è fondamentale anche nei sistemi di
simulazione. Le connessioni fisiche sono tipicamente caratterizzate
dall'interfacciamento di più grandezze (un filo elettrico interfaccia tensione e corrente a
monte e valle, un albero meccanico coppia e posizione angolare)
idealDiode
mean
mean
f=50
potentialSensor
V
avg1
AVG
ground
VEI: Introduzione
Nel diagramma accanto
le interfacce fra i
componenti elettrici
sono fisiche; il sensore
di tensione genera un
diagramma di segnale
(o block diagram) Il
segnale può essere e
inviato in nodi
sommatori, integratori,
funzioni di trasferimento
ecc.
11
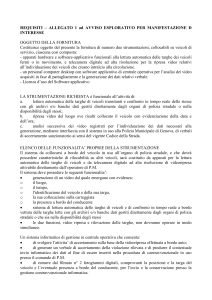
Diagrammi fisici e di segnale (3)
Driver
Gear
ratio=6
Wheel
mP1
mass
m=vMass
I
k=1
dragF
MechEn
Il diagramma superiore rappresenta lo schema di un veicolo a propulsione elettrica.
Si osservano la batteria batt, l'azionamento elettrico drive, il riduttore Gear, la ruota (converte
grandezze rotazionali in traslazionali), la massa mass, la resistenza al moto dragF.
Il sensore di potenza mP1 crea un segnale e il relativo diagramma: l'energia si ottiene per
integrazione.
Analogamente il sensore di velocità sensor crea un diagramma di segnale che include il pilota
driver, il cui segnale va all'azionamento drive.
VEI: Introduzione
12
Tipi di veicoli – conversioni energetiche fondamentali
fuel
ICE
M
T
T
BEV
ICEV
fuel
fuel
ICE
GenSys
M
T
ICE
T
M
S-HEV
P-HEV
En. chimica
(elettrostatica)
VEI: Introduzione
En. elettrica
En. meccanica
variabilità
13
Sistema propulsivo – sistema completo
ICEV
fuel
ICE
BEV
M
T
electric drive= (qui) power train
power train
Ruote
motrici
Energia
per la
propulsione
Power Train
control
comandi
Energia
dispersa
Visualizzazioni
Pilota
Energia
per i carichi
ausiliari
comandi
VEI: Introduzione
Visualizzazioni
control
Sistemi ausiliari
Energia
dispersa
Gli schemi della pagina
precedente erano relativi solo a :
- apparato propulsivo (power
train)
- area energetica.
Nel corso studieremo anche i
sistemi ausiliari e l'area del
controllo.
14
VEI = SEB + PE
Energia
per la
propulsione
Power Train
control
comandi
Energia
dispersa
Visualizzazioni
Pilota
Energia
per i carichi
ausiliari
comandi
Visualizzazioni
control
Sistemi ausiliari
Il corso integrato di Veicoli
Elettrici e Ibridi è composto
di:
Sistemi Elettrici di Bordo
Propulsione Elettrica
Energia
dispersa
Sistemi Elettrici di Bordo:
architetture di veicoli elettrici e ibridi; analisi LCA-WtW
gestione energetica dei veicoli ibridi
Principali componenti (accumulatori, macchine elettriche, convertitori, fuel cells)
Propulsione elettrica:
Architettura del sistema ferroviario (veicoli filoalimentati)
Meccanica del veicolo ferroviario e circolazione ferroviaria
Analisi e sintesi di azionamenti elettrici basati su macchina asincrona e brushless
VEI: Introduzione
15
VEI = SEB + PE Lezioni-Esercitazioni
SEB e PE richiedono per analisi e sintesi capacità simulative.
Caratteristiche dei veicoli:
●
Sistemi multi-physics (meccanica traslazionale e rotazionale, sistemi elettrici, elettronici,
fluidici, …)
Forte interazione fra l'area energetica e quella informatica (necessità di simulazione
cyber-physical)
Necessità di simulazione hybrid tempo continua/tempo discreta
Non solo veicoli. L'acquisizione di competenze simulative di questo tipo sarà riutilizzabile
dagli allievi in tutti i campi applicativi (zero-dimensionali) in cui si troveranno ad operare.
Linguaggio Modelica. Consente simulazioni multi-physics, cyber-physical, hybrid con
diversi tool simulativi, anche open source
Non solo Dymola. Nel corso si userà Dymola, universalmente considerato il riferimento per
simulazioni Modelica-based, ma la maggior parte delle simulazioni sarà ripetibile con altri
tool, e verificata con OpenModelica. La competenza acquisita dagli allievi sarà quindi
riutilizzabile anche in ambienti lavoratici che non dispongono di Dymola.
VEI: Introduzione
16