LABORATORIO DI AUTOMAZIONE
Progetto 1 – Registratore digitale
Prof. Carlo Rossi
DEIS - Università di Bologna
Tel: 051 2093024
email: [email protected]
Procedura di sintesi
Guida alla sintesi del controllo
• Motivazioni per l’utilizzo di un controllore in
retroazione
–
–
–
–
Stabilizzazione
Reiezione dei disturbi
Errore all’inseguimento
Riduzione di sensitività alla variazione dei parametri del
plant
• Obiettivo del controllo: fare in modo che il sistema
esegua correttamente il suo compito
– Il contributo ottenibile dal controllo viene sempre più
considerato nelle fasi iniziali di progetto
– Sempre più sistemi non sono in grado di funzionare senza
controllo
Procedura di sintesi
Linee guida per il processo di sintesi
•
Capire il processo e le specifiche
– Trasformare le specifiche in requisiti in termini
•
•
•
temporali
frequenziali
locazione poli e zeri
– Determinare
•
•
•
l’errore ammissibile
i possibili segnali di comando e di disturbo
Possibilità fisiche del sistema e limitazioni
– Derivare un modello del sistema
•
•
Modello semplificato per la sintesi
Modello di riferimento per la simulazione e la verifica
Procedura di sintesi
Linee guida per il processo di sintesi
•
Scegliere i sensori
– Definire quali variabili sono importanti per il controllo e quali
sono effettivamente misurabili
– Valutare la possibilità di utilizzare sensori per il disturbo
– Fattori che condizionano la scelta dei sensori
•
•
•
•
•
Tecnologici: elettrici, magnetici, meccanici, . .
Prestazioni funzionali: linearità, offset, accuratezza, range
dinamico, rumore
Caratteristiche fisiche: peso, dimensioni
Fattori di qualità: affidabilità, durata, manutenzione
Costo: costo diretto, disponibilità, testing e manutenzione
Procedura di sintesi
Linee guida per il processo di sintesi
•
Scegliere gli attuatori
– Determinare le variabili che possono essere attuate
•
Scelta del posizionamento degli attuatori
– Fattori
•
•
•
•
•
Tecnologia: elettrici, idraulici, pneumatici, termici, . . .
Prestazioni funzionali: forza massima, range di linearità,
velocità di attuazione, potenza, efficienza
Caratteristiche fisiche: peso, dimensioni
Fattori di qualità: affidabilità, durata, manutenzione
Costo: costo diretto, disponibilità, testing e manutenzione
Procedura di sintesi
Linee guida per il processo di sintesi
•
Derivare un modello lineare
– Identificare i punti di equilibrio
– Costruire un modello dinamico a piccolo segnale lineare
valido per un range di frequenze che copre le specifiche
iniziali (passo 1)
– Validare il modello con dati sperimentali se possibile
– Derivare le varie forme
•
•
•
Spazio degli stati
Funzione di trasferimento
Poli e zeri
– Utilizzare un tool di simulazione per sistemi di controllo
Procedura di sintesi
Linee guida per il processo di sintesi
•
Provare un metodo di sintesi semplice: PID, rete
anticipo e/o ritardo
– Stimare la complessità del problema
•
Diagramma di Bode e luogo delle radici del plant
– Diagramma di Bode per sistemi stabili
– Luogo delle radici per sistemi instabili (poli a parte reale
positiva)
– Provare a soddisfare le specifiche con reti ritardo/anticipo
•
•
•
Aggiunta del termine integrale se le specifiche lo richiedono
Considerare una compensazione con misura del disturbo
Considerare gli effetti del rumore di misura, confrontare
l’utilizzo di una rete di anticipo con una misura diretta della
variabile “velocità”
– Riconsiderare le specifiche, la configurazione del sistema,
la localizzazione dei sensori e degli attuatori
•
Ritornare al passo 1 se si rilevano possibili miglioramenti
Procedura di sintesi
Linee guida per il processo di sintesi
•
Provare un metodo di sintesi ottima
– Se la procedura euristica precedente non fornisce i risultati
voluti, provare una sintesi basata sul controllo ottimo
•
Pole lacement e luogo delle radici simmetrico
– Selezione dei poli dell’osservatore
•
Compromesso tra rumore di processo e di misura
– Costruzione dei diagrammi di Bode e luogo delle radici
•
•
Margini di stabilità
Robustezza alle variazioni parametriche
– Modifica dei poli del sistema ad anello chiuso per il migliore
compromesso
– Confronto tra il progetto ottimo e quello frequenziale e
scelta del migliore
Procedura di sintesi
Linee guida per il processo di sintesi
•
Simulazione delle prestazioni del progetto
– Verifica sul modello di riferimento
•
•
•
•
Nonlinearità
Saturazioni
Rumore
Variazioni dei parametri
– Possibile ottimizzazione dei parametri
•
Costruzione di un prototipo sperimentale
– Possibile ritorno ad uno qualsiasi dei passi di progettazione
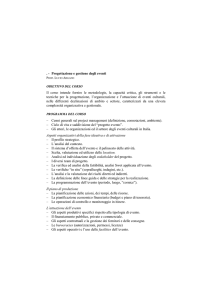
Progetto 1
Il registratore digitale
ω
Bobina
Argano
Tubo a
vuoto
ω
Bobina
Progetto 1
Il registratore digitale
• Un piccolo meccanismo (argano) è utilizzato per
controllare la velocità di passaggio sulla testina di
lettura
• Le bobine sono mosse da motori elettrici
• Il moto dell’argano è disaccoppiato da quello delle
bobine tramite delle camere a vuoto che
garantiscono una tensione del nastro praticamente
costante
– Permette un progetto separato dei controlli dell’argano, del
vuoto e delle bobine
Progetto 1
Il registratore digitale
• Obiettivo del controllo dell’argano è la regolazione
della velocità e della tensione del nastro alla testina
– La velocità da controllare può arrivare a circa 5 m/s
– Il transitorio da zero alla velocità finale deve essere il più
rapido possibile
– La tensione del nastro deve essere inferiore a 6 N per
evitare una distorsione permanente del nastro
– Specifiche:
• tempo di assestamento al gradino inferiore a 12 ms
• Overshoot inferiore al 5%
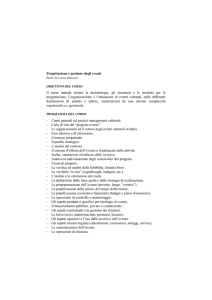
Progetto 1
L’argano
x1
T
x3
x2
D1
D2
K1
K2
J2
r1
J1
Testina
lettura/scrittura
r2
ω2
θ2
ω1
θ1
F
Progetto 1
Selezione di sensori ed attuatori
• Attuatori possibili
– Motore elettrico su una delle due sezioni dell’argano
• DC motor per le caratteristiche di controllabilità, dimensioni,
peso
• Accellerazione a bassa velocità
• Basso ripple di coppia
• Sensori possibili
– Dinamo tachimetrica sul meccanismo non attuato
dell’argano
– Encoder per la misura di posizione angolare sul meccansimo
non attuato
• Condizionamento ed uscita analogica di posizione
– Corrente nel motore DC di azionamento
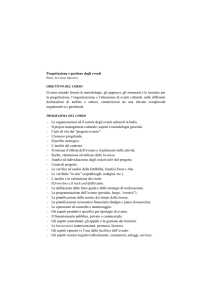
Progetto 1
L’argano
x1
T
x3
x2
D1
D2
K1
K2
β2
J2
β1
ω2
Testina
lettura/scrittura
r1
J1
r2
θ2
ω1
kt
θ1
θ2
i
F
+
e
-
R
L
ω2
Progetto 1
Simbologia
•
•
•
•
•
•
•
Variabili
e = tensione applicata
i = corrente nel motore DC
T = tensione del nastro
x1, x2, x3 = posizioni del
nastro
v1, v2, v3 = velocità del nastro
θ1,θ2 = posizioni angolari
meccanismo attuato e libero
ω1, ω2 = velocità angolari
Parametri
•
•
•
•
•
•
•
•
•
•
•
F=6N
Tensione massima = 12 N
r1 = r2 = 0.02 m
β1 = β2 = 0.01 Nms
J1 = 4 10-5 kg m2
J2 = 10-5 kg m2
D1 = D2 = 20 N/m s
K1 = K2 = 4 104 N/m
kt = ke = 0.03 V s
R=1 Ω
L = 10-3 H