1
Lavoro
Consideriamo una forza F~ applicata ad un punto materiale m che si muove in moto rettilineo. Relativa~ effettuato del punto materiale, si dice che la forza compie un lavoro dato
mente a uno spostamento ∆s
dalla quantità
~ = F ∆s cos θ.
W = F~ · ∆s
La precedente relazione introduce una nuova grandezza fisica, il lavoro, in una situazione affatto particolare, caratterizzata dall’aver considerato la forza in esame implicitamente costante e il moto rettilineo.
La definizione del lavoro può tuttavia essere estesa al caso in cui la forza varia in intensità, direzione
e verso, e il moto del punto materiale avviene lungo una traiettoria qualsiasi. Sebbene il caso generale
non possa essere affrontato in modo formale senza la matematica del calcolo integrale, è comunque utile
dare qualche cenno alla tecnica con cui esso viene ricondotto alla situazione elementare di forza costante
e spostamento rettilineo.
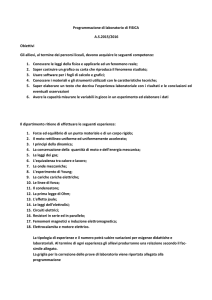
Si consideri un punto materiale che descrive una curva γ ed è
~1
F
soggetto ad una forza F~ . S’immagini ora di poter suddividere il
F~n
moto lungo la curva γ in un numero n sufficientemente elevato di
δ~sn
piccoli spostamenti rettilinei δ~s durante i quali la forza F~ possa
δ~s1
essere considerata pressoché costante: il lavoro Wγ compiuto da
F~ lungo la curva γ viene definito come limite della somma:
γ
Wγ =
X
γ
F~ · δ~s = F~1 · δ~s1 + · · · + F~n · δ~sn
per il numero n di spostamenti in cui è stato suddiviso il moto tendente all’infinito.
Si osservi che nella definizione di lavoro, la forza F~ non deve essere necessariamente l’unica forza o la
risultante delle forze applicate al punto materiale. Se su un punto materiale agiscono simultaneamente
due o più forze allora ciascuna compirà un certo lavoro e, come facile intuire, il lavoro della forza risultante
sarà la somma dei lavori compiuti da ciascuna forza:
W F1 +F2 = W F1 + W F2
F~1
F~2
δ~s
Inoltre, se scomponiamo un moto γ pensandolo come sequenza di un primo moto γ1 e di un successivo
moto γ2 allora si ha
W γ = W γ1 + W γ2
γ γ2
γ1
Tenuto conto che gli spostamenti δ~s, quando diventano infinitesimi, risultano tangenti alla traiettoria,
si può facilmente dedurre che è sempre nullo il lavoro delle forze che in ogni punto risultano normali
alla traiettoria. Questo è ad esempio il caso delle reazioni vincolari nei vincoli lisci o quello della forza
centripeta nel moto circolare uniforme:
~
R
δ~s
δ~s
~
F
Di particolare interesse è il caso in cui il moto rettilineo e la forza, parallela alla direzione di moto, ha
intensità variabile, poiché, almeno in linea di principio, è possibile ottenere il lavoro attraverso considerazioni puramente geometriche. Si può supporre che la traiettoria del moto giaccia sull’asse x, quindi la
forza sarà del tipo F~ = Fx x̂, ove Fx è la componente scalare lungo x e x̂ il vettore unitario dell’asse x.
Per semplicità si prenderà in esame solo il caso di forze la cui intensità e il cui verso dipendono esclusivamente dal loro punto di applicazione e non dalle altre variabili cinematiche del moto, quali ad esempio la
velocità o il tempo. Sono forze di questo tipo la forza peso e la forza elastica. Per allegerire la notazione,
senza timore di ambiguità, si indicherà di qui in poi semplicemente con F , simbolo solitamente riservato
all’intensità del vettore, la componente scalare Fx .
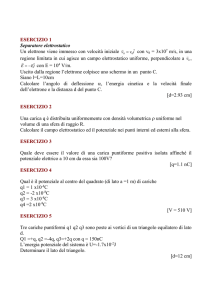
Nel diagramma F x che riporta l’andamento della forza F in funzione del suo punto di applicazione
x si può scoprire una prima interpretazione geometrica del lavoro nel caso in cui F è costante: infatti
la quantità W = F ∆x rappresenta, a meno del segno, l’area sottesa tra la curva F (x) e l’asse x, in
corrispondenza al considerato spostamento ∆x.
F
WA→B = F ∆x = A
F
A
B
A
xA
xB
x
In accordo alla definizione di lavoro, il segno del lavoro risulta positivo se la regione si trova sopra l’asse
x e lo spostamento ∆x è positivo oppure se la regione è sotto l’asse x e lo spostamento è negativo; negli
altri casi il lavoro è negativo.
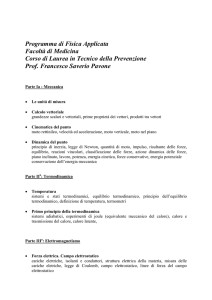
Per la generalizzazione al caso di forza variabile si procede con la tecnica, già usata precedentemente, che
prevede la suddivisione dello spostamento ∆x come somma di un elevato numero di piccoli spostamenti δx,
in ciascuno dei quali si possa approssimare F costante. In virtù dell’interpretazione geometrica stabilita
sopra, è facile riconoscere che il lavoro complessivo corrisponde alla somma algebrica delle aree dei piccoli
rettangoli aventi base δx e altezza F (x). Facendo tendere all’infinito il numero degli spostamenti δx si
intuisce che la regione formata dai rettangolini convergerà a quella racchiusa tra l’asse x e il grafico F (x)
della forza.
F
B
b
A
b
xA
xB
δx
x
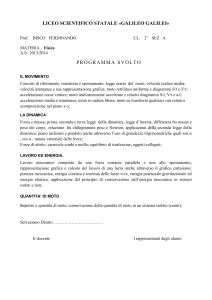
Riassumendo quanto detto sinora e tenuto conto del fatto che la regione sopra l’asse x corrisponde al
caso in cui la forza agisce nello stesso verso dell’asse, il lavoro può essere ottenuto come segue:
• se lo spostamento ∆x è positivo allora il lavoro W risulta pari alla somma algebrica delle aree delle
parti di regione sopra l’asse x prese con segno positivo e le delle aree delle parti di regione sotto
l’asse x prese con segno negativo,
• se lo spostamento ∆x è negativo, nella somma algebrica i segni delle aree vanno invertiti.
F
WA→B = a1 − a2
A
b
xA
a1
xB x
a2
b
B
1.1
Lavoro della forza peso
Il calcolo del lavoro risulta particolarmente semplice, anche considerando moti non rettilinei, se la forza è
costante. E’ questo il caso della forza peso m~g che risulta costante in ogni punto dello spazio (in prossimità
della crosta terrestre). Se si considera la traiettoria γ riportato in figura, non è difficile rendersi conto
che in corrispondenza ad uno spostamento infinitesimo δ~s, il lavoro risulta
dW = m~g · δ~s = −mgδsy ,
ove δsy è la componente dello spostamento rispetto all’asse y. Sommando tutti i contributi è facile
rendersi conto che il lavoro lungo γ risulta pari a
Wγ = −mg(yB − yA ) = −mg∆y.
Si osservi in particolare che il lavoro non risulta quindi dipendere dal percorso, ma solo da A e B, e in
particolare si ha Wγ = WAH + WHB = 0 − mg(yB − yA ) = −mg∆y.
y
B
yB
δ~s
δsy
m~g
yA
0
1.2
γ
H
A
Lavoro della forza elastica
Nel caso della forza elastica, si consideri una molla vincolata ad un’estremità la cui altra estremità a
riposo occupa la posizione x = 0; in base alla legge di Hooke, la forza di richiamo elastico è Fx = −kx,
ove x è la posizione dell’estremità libera della molla. Si immagini di allungare la molla portandone
l’estremità libera dalla posizione xA alla pozione xB . In base alle interpretazioni geometriche evidenziate
precedentemente, è possibile affermare che il lavoro compiuto dalla forza di richiamo elastico corrisponde
all’opposto dell’area del trapezio sotteso tra l’asse x e il segmento AB, ovvero l’opposto della differenza
tra le aree dei triangoli rettangoli OBx e OAx.
F
xA
xB
x
FA
FB
A
A
B
Con semplici calcoli si ottine quindi che
1
1
1 2
1
WA→B = −
(−FB )xB − (−FA )xA = −
kxB − kx2A .
2
2
2
2
Anche in questo caso, si noti che il lavoro non risulta quindi dipendere dal percorso, ma solo da A e B,
e risulta
WA→B = − 21 kx2B − 12 kx2A .
2
Energia cinetica e Teorema Forze Vive
Il Teorema delle Forze Vive o dell’Energia Cinetica stabilisce una fondamentale relazione tra il lavoro della
forza risultante su un punto materiale e l’energia cinetica di quest’ultimo. Questo teorema afferma che
in un qualunque intervallo la variazione di energia cinetica del punto materiale è pari al lavoro compiuto
in tale intervallo dalla forza risultante sul punto materiale, ovvero, in simobli,
∆K = Wtot .
La dimostrazione di quest’affermazione si ottiene nel caso generale tramite il calcolo differenziale, tuttavia
nel caso di moto accelerato uniforme si può ricavare con metodi elementari come segue. Per la seconda
legge della dinamica e per la legge oraria del moto uniforme valgono
F = ma
1
∆x = v0 t + at2 ,
2
e
da cui si ottiene, moltiplicando a sinistra per F e a destra per ma, la seguente uguaglianza
1
F ∆x = m v0 (at) + (at)2 .
2
In virtù dell’equazione cinetica si ha at = v − v0 , per cui la precedente può scriversi nella forma
1
2
F ∆x = m v0 (v − v0 ) + (v − v0 ) ,
2
ed ancora, effettuando qualche semplificazione,
F ∆x =
1
1
mv 2 − mv02 = K − K0 = ∆K,
2
2
ovvero
W = K − K0 .
3
Forze Conservative
Si definisce campo di forze una forza F~ dipendente solo dal punto di applicazione, o forza posizionale.
Si osservi che per una forza siffatta, se γ è un dato moto e γ̄ è il moto compiuto nel verso opposto sulla
medesima traiettoria, allora sussiste la seguente uguaglianza:
Wγ = −Wγ̄ .
Un campo di forze F~ si dice conservativo se per una qualunque coppia di punti A, B nello spazio, e due
moti qualsiasi γ1 , γ2 : A → B, si ha
Wγ1 = Wγ2 .
γ2
A
B
γ1
In virtù dell’osservazione precedente e della proprietà additiva rispetto alla sequenza di percorsi, la
conservatività equivale ad affermare che Wγ = 0 per ogni percorso chiuso (o circuito) γ. Infatti fissati su
γ due punti A e B, e indicati con γ2 e γ̄1 i due tratti in cui γ viene diviso, si ha
Wγ1 = Wγ2 ↔ Wγ1 − Wγ2 = 0 ↔ Wγ1 + Wγ̄2 = 0 ↔ Wγ1 ⊕γ̄2 = 0 ↔ Wγ = 0,
ove γ1 ⊕ γ̄2 è il circuito ottenuto concatenando γ1 a γ̄2 .
γ
γ2
A
B
γ1
3.1
Energia Potenziale
Dato un punto materiale soggetto ad una forza conservativa F~ e fissato arbitrariamente un punto O,
si definisce in ogni punto P dello spazio una grandezza fisica detta energia potenziale della forza F~ nel
punto P la quantità
UP = −WO→P ,
ove O → P è un qualunque moto dal punto O al punto P : pertanto la funzione posizionale U risulta
ben definita solo per le foze conservative in cui il lavoro non dipende dal particolare percorso ma solo dai
punti inziale e finale del moto.
La scelta del punto di riferimento O, in cui ovviamente l’energia potenziale è nulla (U = 0−WO→O = 0,
determina un grado di arbitrarietà nella definizione della funzione U . Si può facilmente verificare che
scegliendo un qualunque altra punto di riferimento riferimento O0 , l’energia potenziale U 0 soddisfa in ogni
punto la relazione
U 0 = U + c,
ove c è una costante reale; per questo motivo si è soliti dire che l’energia potenziale è definita a meno di
una arbitraria costante additiva.
Tramite le proprietà del lavoro può scrivere
WA→B = WA→O + WO→B = −WO→A + WO→B = UA − UB = −∆U,
quindi si è stabilito che
WA→B = −∆U
Tale relazione evidenza il fatto che sebbene l’energia potenziale contenga un certo grado di arbitrarietà connesso alla scelta del punto ad energia potenziale nulla, le variazioni di energia potenziale sono
univocamente definite e corrispondono all’opposto del lavoro compiuto dalla forza.
3.2
Conservazione dell’Energia Meccanica nei Sistemi Conservativi
Si consideri un punto materiale soggetto ad un’unica forza F~ di tipo conservativo cui è associata un’energia
potenziale U e si definisca Energia Meccanica la somma
E = K + U.
Vale in tal caso la seguente relazione, detta Principio di conservazione dell’energia Meccanica:
∆E = 0
Si consideri infatti la relazione tra energia cinetica e lavoro stabilita dal Teorema delle forze Vive
W = Kf − Ki ,
che, in virtù del legame tra lavoro e energia potenziale W = −∆U , può scriversi
−(Uf − Ui ) = Kf − Ki ,
cioè
Kf + Uf = Ki + Ui ←→ Ef = Ei ←→ Ef − Ei = 0 ←→ ∆E = 0,
come volevasi dimostrare.
Nel caso in cui siano presenti anche forze non conservative che compiono un lavoro W n.c. , l’energia
meccanica E non si conserva e sussiste
∆E = W n.c.
∆E = 0
4
4.1
Energia e Potenziale nel Campo Elettrostatico
Energia potenziale di un sistema di cariche puntiformi
Dato un sistema Σ di cariche puntiformi in quiete, e indicata con ∞ una configurazione in cui tali cariche
risultano a distanza infinita l’una dall’altra, si definisce energia potenziale del sistema Σ l’opposto
del lavoro compiuto dalle forze elettrostatiche quando le cariche vengono portate dalla configurazione ∞
alla configurazione Σ, ovvero:
f.e.
UΣ = −W∞→Σ
.
Si osservi che essendo la forza di Coulomb conservativa l’energia potenziale risulta ben definita indipendentemente dai percorsi scelti per portare le singole cariche da una configurazione all’altra.
Nel caso di due cariche q1 e q2 si ha:
q1 q2
U1 2 = k 2 ,
r1 2
ove, nel vuoto, k =
qj , si ottiene che
1
4π0 .
Nel caso di N cariche, considerando il contributo di tutte le possibili coppie qi ,
UΣ =
4.2
X qi qj
k 2 .
ri j
i<j
Energia potenziale e Lavoro
In virtù della conservatività delle forze elettrostatiche si deduce che se se un sistema di cariche passa
dalla configurazione Σi alla configurazione Σf , il lavoro totale compiuto dalle forze elettrostatiche sulle
cariche del sistema risulta
W f.e. = −∆U = −(UΣf − UΣi )
4.3
Potenziale elettrostatico
La nozione di potenziale elettrostatico, pur avendo un legame forte con quella di energia potenziale
elettrostatica, si ancora in modo più diretto al concetto di campo elettrostatico; il potenziale risulta infatti
una grandezza posizionale, cioè dipendente solo dal particolare punto dello spazio considerato. Quando si
parla di potenziale elettrostatico si assume quindi che la configurazione di cariche che determina il campo
elettrico sia fissa.
Fissato arbitrariamente un punto O in cui il potenziale è nullo (VO = 0), il potenziale elettrostatico
in un punto P risulta
W f.e.
VP = − O→P ,
q0
ove W f.e. è il lavoro compiuto dalle forze elettrostatiche su una immaginaria carica di prova q0 che dal
punto O si porta al punto P .
È immediato costatare che se la carica di prova si sposta da un punto qualunque A ad un punto B
allora risulta
∆V = VB − VA = −
4.4
f.e.
f.e.
W f.e.
W f.e. + WO→B
W f.e.
WO→B
− O→A = − A→O
. = − A→B .
q0
q0
q0
q0
Potenziale e circuitazione
~ su una curva γ : A → B è definito in
Definendo l’operatore circuitazione1 del un campo elettrostatico E
~
modo del tutto analogo al lavoro di una forza posizionale F :
X
~ def
~ · δ~s
ΓA→B (E)
=
E
γ
È facile a questo punto riconoscere che
~
V (B) − V (A) = −ΓA→B (E).
1 Più precisamente l’operatore circuitazione prevederebbe che γ sia una curva chiusa, ovvero che A = B, ma per comodità
si userà lo stesso nome anche per l’operatore applicato ai cammini aperti.
4.5
Potenziale elettrostatico in campo elettrostatico costante
In questo caso la forza elettrostatica sulla carica di prova è costante pertanto il calcolo della circuitazione
del campo elettrostatico sono particolarmente agevoli da calcolare è semplice e risulta
−→
~ ·−
V (B) − V (A) = −E
AB
pertanto, in analogia con il caso del campo gravitazionale terrestre, se si fissa come in figura un asse z
~ risulta
antiparallelo al campo elettrico E,
V (B) − V (A) = E∆z = E(zB − zA )
z
E
zA
A
B
zB
0
Ponendo convenzionalmente V = 0 nei punti in cui l’ascissa z è nulla, si può quindi porre
V (P ) = EzP .
Proseguendo con l’analogia gravitazionale, ad una carica di prova q0 immersa in campo elettrico costante
e posizionata in un punto avente ascissa z, è possibile anche associare un’energia potenziale elettrostatica
definita da
U el = q0 Ez,
la quale soddisfa ovviamente le relazioni
el
WA→B
= −∆U = −q0 E∆z.
4.6
Potenziale elettrostatico di un sistema di cariche
Nel caso del campo elettrostatico generato da un sistema Σ di cariche puntiformi in quiete, se si assume
convenzionalmente che il potenziale sia nullo in un punto ∞ che si trova a distanza infinita dal sistema
di cariche, cioè in quei punti in cui una carica di prova si troverebbe in pratica a non interagire con il
sistema Σ,il potenziale in un dato punto P risulta
VP =
X qi
W∞→P
=
k ,
q0
ri
i
ove ri è la distanza (non nulla) della carica qi dal punto P . Nel caso di un sistema formato da una
sola carica q la precedente relazione è di facile derivazione. Si ricordi infatti che il lavoro delle forze
elettrostatiche per portare q0 da un punto ∞ a distanza infinita ad un punto P a distanza r da q è
W∞→P = −Uq q0 = −k
qq0
,
r
pertanto, in base alla definizione di potenziale e ricordando che si è assunto V (∞) = 0, risulta
V (P ) = V (P ) − V (∞) = −
W∞→P
q
=k .
q0
r
La derivazione della formula nel caso di un sistema di N cariche deriva dall’additività del lavoro e viene
lasciata come esercizio.