DICA - Sez. Geodesia e Geomatica
Rilievi con UAS per applicazioni
fotogrammetriche: generazione di modelli 3D
di costruzioni e del territorio
L. Pinto, G. Sona
IL GRUPPO DI LAVORO
2
Ing. Diana Pagliari
Ing. Rossana Gini
Dr. Giovanna Sona
Prof. Livio Pinto
Ing. Daniele Passoni
Ing. Paolo Dosso
SOMMARIO
• UAS/SAPR definizioni e classificazioni
• Motivazioni e prime esperienze: il progetto FoGLIE
• Primi test (di volo e di modellizzazione 3D)
• La scelta del velivolo
• La scelta delle camere
• Analisi della qualità geometrica delle fotocamere
• Fotogrammetria vs Computer Vision
• Normativa ENAC sui SAPR
• Alcune realizzazioni significative
3
UAS/SAPR: definizione e classificazione
UAS = Unmanned Aerial System
veicolo aereo senza pilota umano a bordo e pilotato da un equipaggio
che opera da una stazione remota di comando e controllo
Drone
ambito militare
Sistemi Aeromobili a
Pilotaggio Remoto
(SAPR)
2008
>2
milioni
2010
>6
milioni
ambito civile
2013
> 16
milioni
UAS/SAPR: classificazioni
Con UAS (per applicazioni geometriche) ci si riferisce a velivoli con caratteristiche
e tecnologie differenti.
È stato proposto di creare uno standard di riferimento internazionale, ma
continuano ad esistere diverse classificazioni:
• dotati di motore
vs
privi di motore (kite, palloni)
UAS/SAPR: classificazioni
Con UAS (per applicazioni geometriche) ci si riferisce a velivoli con caratteristiche
e tecnologie differenti.
È stato proposto di creare uno standard di riferimento internazionale, ma
continuano ad esistere diverse classificazioni:
• ad ala fissa
vs
a rotore
UAS/SAPR: classificazioni
Con UAS (per applicazioni geometriche) ci si riferisce a velivoli con caratteristiche
e tecnologie differenti.
È stato proposto di creare uno standard di riferimento internazionale, ma
continuano ad esistere diverse classificazioni:
• a singolo rotore
vs
multirotore
UAS/SAPR: classificazioni
Con UAS (per applicazioni geometriche) ci si riferisce a velivoli con caratteristiche
e tecnologie differenti.
È stato proposto di creare uno standard di riferimento internazionale, ma
continuano ad esistere diverse classificazioni:
• più leggeri dell’aria
vs
più pesanti dell’aria
UAS/SAPR: classificazioni
Con UAS (per applicazioni geometriche) ci si riferisce a velivoli con caratteristiche
e tecnologie differenti.
È stato proposto di creare uno standard di riferimento internazionale, ma
continuano ad esistere diverse classificazioni:
• con sensori integrati a basso costo
vs
alto costo
UAS/SAPR: classificazioni
European Association of Unmanned Vehicles Systems (EuroUVS)
scelta UAS
costo, dimensioni, applicazione, sensore,
payload, autonomia di volo, area da ricoprire, ecc.
UAS/SAPR: applicazioni civili
Esecuzione di missioni "noiose, sporche e pericolose“ (le 3 D):
usi commerciali (AMAZON Delivery)
UAS/SAPR: applicazioni civili
Esecuzione di missioni "noiose, sporche e pericolose“ (le 3 D):
sorveglianza (elettrodotti; ponti; video ispezione)
gestione delle emergenze (grazie alla possibilità di prendere decisioni, in
tempo reale, sulla base di immagini e video trasmessi alle stazioni a terra)
altre applicazioni: ecologia (http://conservationdrones.org/)
UAS/SAPR: applicazioni civili
Esecuzione di missioni "noiose, sporche e pericolose“ (le 3 D):
gestione delle emergenze (grazie alla possibilità di prendere decisioni, in
tempo reale, sulla base di immagini e video trasmessi alle stazioni a terra)
UAS/SAPR: applicazioni civili
Esecuzione di missioni "noiose, sporche e pericolose“ (le 3 D):
altre applicazioni: ecologia (http://conservationdrones.org/)
UAS/SAPR: applicazioni fotogrammetriche
Applicazioni fotogrammetriche e di telerilevamento, che richiedono
sistemi GPS/INS in grado di garantire una navigazione di precisione:
APPLICAZIONI
CIVILI:
rilievi a scopi cartografici (aggiornamento di carte
tecniche), ispezione di ponti e dighe, ecc.
SCOPI FORESTALI: monitoraggio e determinazione della copertura
vegetativa alloctona, monitoraggio incendi.
BENI CULTURALI: documentazione e generazione di modelli 3D di siti
archeologici ed edifici storici a partire da immagini ad alta risoluzione
AGRICOLTURA DI PRECISIONE: valutazione della concentrazione di
fertilizzanti (p.e. azoto), valutazione del contenuto d'acqua e dello stress
derivante per le piante, applicazione di erbicidi o pesticidi a singole piante.
UAS/SAPR per Fotogrammetria vantaggi VS svantaggi
• costo di acquisto, manutenzione e
d’esercizio contenuto rispetto agli
aerei tradizionali
• missioni svolte autonomamente
• assenza di pilota qualificato a bordo
• alta manovrabilità
• Rilievi in situazioni pericolose: siti
di disastri naturali ed antropici
• Rilievi in aree inaccessibili: per
operazioni a bassa quota e vicine
ad oggetti
• Rilievi low-cost: quando una
missione aerea sarebbe
antieconomica
• limitazione di peso e delle
dimensioni del carico
• sensori di minor qualità
• motori di ridotta potenza e
autonomia
• Riduzione della qualità
dell'immagine
• Minore accuratezza nella
realizzazione del volo
• Limitazioni nell'altitudine
raggiungibile e nella durata del
volo
Tecniche di rilievo 3D a confronto
(Remondino F., Nex F. - UAV for 3D mapping applications: a review)
18
MOTIVAZIONI E PRIME ESPERIENZE: IL PROGETTO FoGLIE
FoGLIE: Fruition of Goods Landscape in Interactive Environment
Progetto finanziato da Regione Lombardia (2011-2013)
• Differenti partner: 5 realtà imprenditoriali lombarde + Politecnico di Milano (DIIAR)
• Attività di ricerca e di sviluppo sperimentale di un prototipo
SVILUPPARE
una nuova guida
multimediale anche con
contenuti stereoscopici
utente attivo
INTEGRARE
fruibilità e monitoraggio
dei beni
PARCO ADDA NORD
19
PRIME ESPERIENZE CON UAS (2011)
Elicotteri Helicam
Quadrielica
Md-200
Contenuti e video scenici
(anche in stereoscopia)
Immagini aeree ad alta
risoluzione: RGB & NIR
generazione di DSM
individuazione specie
arboree alloctone
ESPERIENZE DI MODELLIZZAZIONI 3D
20
Modellizzazione 3D da nuvole di punti fotogrammetriche
Villa Castelbarco
a Vaprio d’Adda (MI) (2012)
ESPERIENZE DI MODELLIZZAZIONI 3D
21
Modellizzazione 3D da nuvole di punti fotogrammetriche
(con rilievi a terra)
Vellutificio Velvis (Visconti di Modrone)
a Vaprio d’Adda (MI) (2012)
ESPERIENZE DI MODELLIZZAZIONI 3D
22
Diga Poiret a Paderno
d’Adda (MI) (2012)
Modellizzazione 3D da nuvole di punti
fotogrammetriche (acquisite da aereo,
da UAV e da terra)
PRIMO TEST RILIEVO MULTISPETTRALE (2011)
MD4-200
• Parco Adda Nord: Medolago (BG)
• Estensione: 120x100 m2
• Differenti tipi di copertura del suolo
• Triangolazione aerea con set
RGB
• Confronto con telemetria → non
usabile per orientamento diretto
• Immagini idonee per scopi di
modellizzazione 3D
• Creazione DSM: 0,10x0,10 m2, da
editare
23
Pentax Optio A40: RGB
Scopo geometrico (DSM)
PRIMO TEST RILIEVO MULTISPETTRALE (2011)
MD4-200
24
Sigma DP1: NIR
scopo radiometrico (classificazione)
• Ortofoto RGB & NIR: 0,05x0,05 m2
→ coregistrazione
Terreno
Robinia
Erba
Ombra
Olmo
Carpino
Cemento
Ailanto
• 10 variabili: 4 originali + 6 derivate
• Classificazione speditiva
unsupervised (ISOCLASS)
• Classificazione supervised
(con training samples)
25
SCELTA DEL VELIVOLO “PoliMI”
MULTIROTORE
MULTIROTORE
VS
.
+ Budget
+ Sistema aperto (camera,
navigazione, ecc.)
+ Payload
+ Governo della fotocamera
+ Prese ravvicinate
- Autonomia di volo
- Addestramento al pilotaggio
ALA FISSA
ALA FISSA
+
+
+
+
Autonomia di volo
Quota di volo
Copertura fotogrammetrica
Gestione del volo
-
Payload
Sistema chiuso (commerciale)
Governo della fotocamera
Budget
VELIVOLO PoliMI “WALL-P”
Esacottero MikroKopter personalizzato
•
•
•
•
•
•
•
Esacottero MikroKopter (RestArt)
Dimensioni: f =70 cm + eliche 12’’
Peso al decollo: 1.2 kg + payload
Alimentazione: 2 batterie al litio 4000 mAh
Velocità: fino a 5 m/sec
Payload: fino a 500 g
Sistema di navigazione: NAV Flight Control
.
GPS (MKGPS) LEA 4H Ublox
• Firmware: in costante aggiornamento
26
LA SCELTA DELLA FOTOCAMERA
Il sensore deve essere scelto in funzione dello scopo dell’applicazione,
tenendo conto dell'UAS a disposizione per trasportarlo.
LA SCELTA DELLA FOTOCAMERA
28
Camere amatoriali con peso e dimensioni ridotte ottimali per UAS
Possibili limitazioni:
•
•
•
•
•
Sensori più piccoli di una reflex (rapporto S/N
sfavorevole)
Ottiche di qualità inferiore e meno stabili
Non sempre possono montare focali fisse
Obiettivi talvolta retrattili
Focale e distanza principale hanno valori non stabili
poiché all’invio del scatto si ha spesso un
riallineamento (seppur minimo) delle lenti
17a Conferenza ASITA: 5-7 novembre 2013 Riva del Garda (TN)
Distorsioni sulle
immagini non
trascurabili
29
CAMERE PoliMI
Nikon 1 J1
•
•
•
•
•
•
Peso: 310 g
Sensore: CMOS (3872x2592 pixel)
Mirrorless
Dimensione pixel: 3.5 mm
Focale obiettivo: 10.5 mm
Immagini: RGB
Tetracam ADCLite
•
•
•
•
•
Peso: 200 g
Sensore: CMOS (2048x1536 pixel)
Dimensione pixel: 2,9 mm
Focale: 8.5 mm
Immagini: 8 o 10 bit CIR (NIR+R+G)
approssimativamente equivalenti
alle bande TM2, TM3, TM4
30
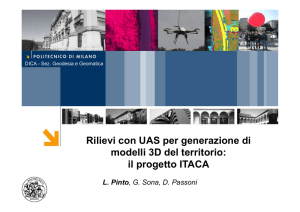
QUALCHE CONSIDERAZIONE SULLA QUALITA’ DELLE CAMERE
Pannello Siemens per analisi
della risoluzione geometrica reale
↓
diverse aperture del diaframma a
diverse distanze: 30 m e 50 m
Nikon 1
50 m statico
Nikon 1
30 m statico
Nikon j1 30 m
k = 6.3
f =10 mm
Nikon j1 50 m
k = 4.5
f =10 mm
31
QUALCHE CONSIDERAZIONE SULLA QUALITA’ DELLA ADClite
30 m
1,4
30 m
dinamico
4
1,4
8
4
statico
16
8
16
32
QUALCHE CONSIDERAZIONE SULLA QUALITA’ DELLA ADClite
30 m
1,4
4
8
statico
16
I risultati migliori si ottengono con otturatore parzialmente chiuso
f/d = 4
30 m
dinamico
1,4
4
8
16
33
QUALCHE CONSIDERAZIONE SULLA QUALITA’ DELLA ADClite
• Risoluzione geometrica effettiva: Tetracam ADCLite
• Caso statico: risoluzione reale ~ 80 lp/mm per immagini CIR con f/d = 4
risoluzione reale ~ 100 lp/mm per canale verde con f/d = 8
• Caso dinamico: risultati confermati a meno di effetti di “trascinamento”
• Effetti di disallineamento cromatico
(tra I canali R, G e NIR)
• Rolling shutter
34
IL PROBLEMA DEL ROLLING SHUTTER (RS)
È un metodo per acquisire immagini (solitamente
accoppiato con sensori CMOS) basato
sull’esposizione non simultanea del sensore
Caratteristiche di un otturatore rolling shutter:
http://www.diyphotography.net
•
•
•
Presenza di una slitta che si muove lungo il sensore
Esposizione di ogni parte del sensore per lo stesso tempo
Esposizione non simultanea delle diverse zone del sensore a
causa del movimento della slitta
Si notano gli effetti del rolling shutter
quando c’è un movimento relativo non
trascurabile tra camera e oggetto
http://www.wkumeling.net
IL PROBLEMA DEL ROLLING SHUTTER (RS)
Il problema può essere risolto in 2 modi
differenti :
1) modellizzando lo spostamento di ciascun pixel
dell’immagine in funzione della dinamica della
fotocamera (e quindi dell’UAS);
z
f
k
(X0,Y0,Z0)
2) facendo assorbire gli spostamenti dei pixel da Z
un modello noto di distorsione (dell’obiettivo)
-c
r11 X X 0 r21 Y Y 0 r31 Z Z 0
r13 X X 0 r23 Y Y 0 r33 Z Z 0
Y
x = Dx c
y = Dy c
r12 X X 0 r22 Y Y 0 r32 Z Z 0
r13 X X 0 r23 Y Y 0 r33 Z Z 0
Equazioni di collinearità
y
w
x
y
p(x,y)
x
P(X,Y,Z)
X
36
MODELLO FOTOGRAMMETRICO DI SELF-CALIBRATION
𝑐 ∙ 𝑁𝑥
𝐷
𝑐 ∙ 𝑁𝑦
𝑦 = 𝐷𝑦 −
𝐷
𝑥 = 𝐷𝑥 −
𝐷𝑥 = 𝑥0 + 𝑥(𝒌𝟏 ∙ 𝑟 2 + 𝒌𝟐 ∙ 𝑟 4 +𝒌𝟑 ∙ 𝑟 6 ) + 𝑷𝟏 (𝑟 2 + 2𝑥 2 ) + 2𝑷𝟐 ∙ 𝑥 ∙ 𝑦 + 𝒃𝟏 ∙ 𝑥 + 𝒃𝟐 ∙ 𝑦
𝐷𝑦 = 𝑦0 + 𝑦(𝒌𝟏 ∙ 𝑟 2 + 𝒌𝟐 ∙ 𝑟 4 +𝒌𝟑 ∙ 𝑟 6 ) + 𝑷𝟐 (𝑟 2 + 2𝑦) + 2𝑷𝟏 ∙ 𝑥 ∙ 𝑦
𝒌𝟏 , 𝒌𝟐 , 𝒌𝟑
Coefficienti di
distorsione radiale
37
MODELLO FOTOGRAMMETRICO DI SELF-CALIBRATION
𝑐 ∙ 𝑁𝑥
𝐷
𝑐 ∙ 𝑁𝑦
𝑦 = 𝐷𝑦 −
𝐷
𝑥 = 𝐷𝑥 −
𝐷𝑥 = 𝑥0 + 𝑥(𝒌𝟏 ∙ 𝑟 2 + 𝒌𝟐 ∙ 𝑟 4 +𝒌𝟑 ∙ 𝑟 6 ) + 𝑷𝟏 (𝑟 2 + 2𝑥 2 ) + 2𝑷𝟐 ∙ 𝑥 ∙ 𝑦 + 𝒃𝟏 ∙ 𝑥 + 𝒃𝟐 ∙ 𝑦
𝐷𝑦 = 𝑦0 + 𝑦(𝒌𝟏 ∙ 𝑟 2 + 𝒌𝟐 ∙ 𝑟 4 +𝒌𝟑 ∙ 𝑟 6 ) + 𝑷𝟐 (𝑟 2 + 2𝑦) + 2𝑷𝟏 ∙ 𝑥 ∙ 𝑦
[12:58:33] Livio Pinto: AVREI BISOGNO DI UN FAVORE...30' DI LAVORO
(SPERO) MI DAI UNA MANO?
𝑷𝟏 , 𝑷𝟐
Coefficienti di
distorsione tangenziale
38
MODELLO FOTOGRAMMETRICO DI SELF-CALIBRATION
𝑐 ∙ 𝑁𝑥
𝐷
𝑐 ∙ 𝑁𝑦
𝑦 = 𝐷𝑦 −
𝐷
𝑥 = 𝐷𝑥 −
𝐷𝑥 = 𝑥0 + 𝑥(𝒌𝟏 ∙ 𝑟 2 + 𝒌𝟐 ∙ 𝑟 4 +𝒌𝟑 ∙ 𝑟 6 ) + 𝑷𝟏 (𝑟 2 + 2𝑥 2 ) + 2𝑷𝟐 ∙ 𝑥 ∙ 𝑦 + 𝒃𝟏 ∙ 𝑥 + 𝒃𝟐 ∙ 𝑦
𝐷𝑦 = 𝑦0 + 𝑦(𝒌𝟏 ∙ 𝑟 2 + 𝒌𝟐 ∙ 𝑟 4 +𝒌𝟑 ∙ 𝑟 6 ) + 𝑷𝟐 (𝑟 2 + 2𝑦) + 2𝑷𝟏 ∙ 𝑥 ∙ 𝑦
𝒃𝟏 Distorsione affine:
scala in x
39
MODELLO FOTOGRAMMETRICO DI SELF-CALIBRATION
𝑐 ∙ 𝑁𝑥
𝐷
𝑐 ∙ 𝑁𝑦
𝑦 = 𝐷𝑦 −
𝐷
𝑥 = 𝐷𝑥 −
𝐷𝑥 = 𝑥0 + 𝑥(𝒌𝟏 ∙ 𝑟 2 + 𝒌𝟐 ∙ 𝑟 4 +𝒌𝟑 ∙ 𝑟 6 ) + 𝑷𝟏 (𝑟 2 + 2𝑥 2 ) + 2𝑷𝟐 ∙ 𝑥 ∙ 𝑦 + 𝒃𝟏 ∙ 𝑥 + 𝒃𝟐 ∙ 𝑦
𝐷𝑦 = 𝑦0 + 𝑦(𝒌𝟏 ∙ 𝑟 2 + 𝒌𝟐 ∙ 𝑟 4 +𝒌𝟑 ∙ 𝑟 6 ) + 𝑷𝟐 (𝑟 2 + 2𝑦) + 2𝑷𝟏 ∙ 𝑥 ∙ 𝑦
𝒃𝟐 Distorsione affine:
taglio in y
40
EFFETTO SIMULATO DEL RS LUNGO LA DIREZIONE DI VOLO
Camera: TetraCam ADCLite
• Camera CIR
• CMOS 3,2 Megapixel
• Focale 8,5 mm
𝑠𝑟𝑠 = 𝑣𝑈𝐴𝑆 ∙ 𝑟 ∙ 𝑡𝑓𝑖𝑛 + 𝑡𝑒𝑥𝑝 ∙ 𝑐/ℎ
dove:
• 𝑠𝑟𝑠 : spostamento delle coord. Imm. a causa del RS
• 𝑣𝑈𝐴𝑆 : velocità di volo del drone
• 𝑟: indice che rappresenta la la riga i-esima del sensore
dir. di volo
41
UN CASO REALE: MEDOLAGO
• Fotocamera: Tetracam ADCLite
• 2 strisciate per un totale di 17 immagini (solo
canale Green)
• h di volo strisciata 1: 50 m
• h di volo strisciata 2: 60 m
Matrice di correlazione
No self-calibr.
precisione
di stima
[mm]
38.2
Self-calib (+K1,K2,P1,P2)
33.7
Self-calib (+b1,b2)
12.6
Blocco Medolago
c
K1
K2
K3
P1
P2
b1
b2
c
100
0
1.2
-1.1
-0.2
-2.2
3.6
26.2
K1
K2
K3
100
-91.5
85.3
-4.7
-2.1
7.8
26.2
100
-98.2
1.6
-2.9
-1.3
-15.5
100
-2.4
3.8
1.6
12.4
P1
P2
b1
b2
100
-12.3 100
-29.7 31.5 100
-5.1 9.8 61.8 100
LA RESTITUZIONE DEI PRODOTTI FOTOGRAMMETRICI
Le immagini acquisite da UAS devono essere orientate relativamente tra
loro e nello spazio. In pratica si tratta di determinare i 6 parametri di
Orientamento di ciascuna immagine (Space Resection) e le coordinate
dei punti osservati.
Questa operazione si basa sulla misura:
1) di punti omologhi sulle immagini (estratti automaticamente),
2) di alcuni punti di coordinate note sul terreno.
Si ottengono:
• i parametri di orientamento esterno;
• la nuvola di punti che descrive in
modo 3D l’oggetto;
• le precisioni di stima.
COMPENSAZIONE DEL BLOCCO DI IMMAGINI (Bundle adjustment)
x = Dx c
y = Dy c
Nx
D
Ny
D
• Per ogni punto immagine ho 2 equazioni di collinearita’
• Combinando tutte le equazioni di tutti i punti immagine
-> sistema di equazioni non lineari da solvere (ai minimi quadrati)
Linearizzazione (Taylor) => approssimazioni iniziali per le incognite
INPUT:
•
•
punti misurati sulle immagini
punti d’appoggio/control points
Soluzione con metodo a stelle proiettive (Bundle Adjustment)
-> sistema linearizzato di equazioni di collinearità
-> minimizzazione delle differenze tra osservazioni e ri-proiezioni
OUTPUT (incognite):
•
•
•
coordinate oggetto dei punti immagine
parametri d’orientamento delle immagini
(parametri aggiuntivi: calibrazione della fotocamera)
44
AUTOMATIZZAZIONE ESTRAZIONE DEI PUNTI OMOLOGHI
Uno degli algoritmi più utilizzati si basa sull’operatore di interesse SURF (Bay et al.,
2006)
SURF è un algoritmo robusto e flessibile che permette l’estrazione di punti omologhi
con diverse condizioni di illuminazione, geometrie di presa convergenti, presenza di
occlusioni, rotazioni dei fotogrammi
Costruzione dell'immagine
integrale
Ricerca dei punti di interesse
Assegnazione di un
orientamento
Calcolo del descrittore dei
keypoints
Indicizzazione e Matching
𝒙 = (𝒙, 𝒚)
45
AUTOMATIZZAZIONE ESTRAZIONE DEI PUNTI OMOLOGHI
Uno degli algoritmi più utilizzati si basa sull’operatore di interesse SURF (Bay et al.,
2006)
SURF è un algoritmo robusto e flessibile che permette l’estrazione di punti omologhi
con diverse condizioni di illuminazione, geometrie di presa convergenti, presenza di
occlusioni, rotazioni dei fotogrammi
Costruzione dell'immagine
integrale
Ricerca dei punti di interesse
Assegnazione di un
orientamento
Calcolo del descrittore dei
keypoints
Indicizzazione e Matching
46
AUTOMATIZZAZIONE ESTRAZIONE DEI PUNTI OMOLOGHI
Uno degli algoritmi più utilizzati si basa sull’operatore di interesse SURF (Bay et al.,
2006)
SURF è un algoritmo robusto e flessibile che permette l’estrazione di punti omologhi
con diverse condizioni di illuminazione, geometrie di presa convergenti, presenza di
occlusioni, rotazioni dei fotogrammi
Costruzione dell'immagine
integrale
Ricerca dei punti di interesse
Assegnazione di un
orientamento
Calcolo del descrittore dei
keypoints
Indicizzazione e Matching
47
AUTOMATIZZAZIONE ESTRAZIONE DEI PUNTI OMOLOGHI
Uno degli algoritmi più utilizzati si basa sull’operatore di interesse SURF (Bay et al.,
2006)
SURF è un algoritmo robusto e flessibile che permette l’estrazione di punti omologhi
con diverse condizioni di illuminazione, geometrie di presa convergenti, presenza di
occlusioni, rotazioni dei fotogrammi
Costruzione dell'immagine
integrale
Ricerca dei punti di interesse
Assegnazione di un
orientamento
Calcolo del descrittore dei
keypoints
Indicizzazione e Matching
IL SOFTWARE Structure from Motion EyeDEA
Dip. DICATA Università degli Studi di Parma
Pre-processamento delle
immagini (filtro di Wallis)
Estrazione delle features
(SURF)
Reiezione errori di matching
Post-processamento immagini
(Bundle Adj.)
48
IL SOFTWARE Structure from Motion EyeDEA
Dip. DICATA Università degli Studi di Parma
Pre-processamento delle
immagini (filtro di Wallis)
Estrazione delle features
(SURF)
Reiezione errori di matching
Post-processamento immagini
(Bundle Adj.)
Imposizione
geometria epipolare
Individuazione errori
grossolani (RANSAC)
Vincolo trifocale e
matching guidato
49
IL SOFTWARE Structure from Motion EyeDEA
Dip. DICATA Università degli Studi di Parma
Pre-processamento delle
immagini (filtro di Wallis)
Estrazione delle features
(SURF)
Reiezione errori di matching
Post-processamento immagini
(Bundle Adj.)
50
PRODUZIONE DI ORTOFOTO
Metodo rigoroso (indiretto):
pixel ortofoto, risali sul terreno e da qui
al fotogramma con le equazioni di
collinearità.
DSM
eq. coll.
X,Y Z(X,Y) x,y r,c
DSM
y
Ortofoto: rappresentazione
geometricamente corretta
Immagine non
corretta
x
Ricampionamento
52
RILIEVO DEL POLIGONO DI CISANO BERGAMASCO(BG)
SwingletCAM SenseFly
Proprietà: Studio di Ingegneria
Terradat di Paolo Dosso
Canon
Ixus 220HS
•
•
•
•
•
DIIAR, Laboratorio di Geomatica del Polo Territoriale di Como
Quota di volo = 130 m
GSD = 4.5 cm
5 strisciate
49 immagini (RGB)
15 GCP presegnalizzati
TEST SUI SW FOTOGRAMMETRICI
SW fotogrammetrici
VS
LPS → sw commerciale by Erdas
EyeDEA+Dense Matcher → home
made (Università di Parma)
PhotoModeler scanner → sw comm.
by EOS
1) Calibrazione della camera
2) Identificazione dei punti di
appoggio (GCPs)
3) Ricerca dei punti di legame
(TPs)
4) Orientamento esterno
5) Realizzazione di DSM &
Ortofoto
DIIAR, Laboratorio di Geomatica del Polo Territoriale di Como
53
SW di Computer Vision
Agisoft Photoscan→ Agisoft LLC
Pix4UAV Desktop → Pix4D
1) Orientamento relativo delle
immagini con selfcalibration in
un arbitrario SdR (grazie alla
telemetria)
2) Estrazione automatica dei TPs
3) Rototraslazione del blocco nel
SdR dei GCPs
4) Realizzazione di DSM &
Ortofoto
54
RILIEVO DEL POLIGONO DI CISANO BERGAMASCO(BG)
Software
TPs’
generator
EyeDEA
Agisoft
PhotoScan
#
# TPs
GCPs
s0
Theoretical Accuracy
(RMS of std.dev.)
of TPs
Empirical accuracy
(RMSE) of CPs
Est
Nord
h
Est
Nord
h
[mm]
[mm]
[mm]
[mm]
[mm]
[mm]
[mm]
15
1.4
57
50
142
-
-
-
5
1.4
68
61
181
16
12
36
15
0.3
8
7
20
-
-
-
5
0.3
9
8
23
74
61
83
1052
6098
DIIAR, Laboratorio di Geomatica del Polo Territoriale di Como
55
RILIEVO DEL POLIGONO DI CISANO BERGAMASCO(BG)
COMPLETEZZA DEI DSM
EyeDEA
DIIAR, Laboratorio di Geomatica del Polo Territoriale di Como
56
RILIEVO DEL POLIGONO DI CISANO BERGAMASCO(BG)
QUALITA’ DEI DSM E DELL’ORTOFOTO
Agisoft
Photoscan
DIIAR, Laboratorio di Geomatica del Polo Territoriale di Como
NORMATIVA ENAC RIGUARDANTE I SAPR
57
EASA (European Aviation Safety Agency) normativa SAPR con massa > 150 Kg
ENAC (Ente Nazionale Aviazione Civile) norme per i SAPR con massa < 150 Kg.
Il regolamento ENAC "Mezzi Aerei a Pilotaggio Remoto" è stato emesso il 17/12/2013
e, dopo una prima proroga, è entrato nella piena operatività lo scorso 30/04/2014.
Le norme regolano l'utilizzo dei SAPR, secondo percorsi autorizzativi differenti per
mezzi utilizzati per scopi di lavoro aereo ("attività specializzate") o ludico/ricreativo
("aeromodellismo").
Tra le Attività specializzate vi sono numerose attività professionali o realizzate da
società specializzate, p.e.: rilievi geotopocartografici, riprese cinematografiche,
monitoraggio ambientale, sorveglianza e sicurezza, ispezione impianti ed infrastrutture
Per i SAPR >25 Kg, percorso autorizzativo complesso, assimilabile a quello
dell'omologazione degli aeromobili per i produttori di SAPR, e all'esercenza di
aeromobili per lavoro aereo per gli operatori.
DIIAR, Laboratorio di Geomatica del Polo Territoriale di Como
NORMATIVA ENAC RIGUARDANTE I SAPR
58
Nella categoria di SAPR <25 Kg, si prevedono due scenari autorizzativi:
• operazioni specializzate svolte in contesti operativi non critici (aree agricole e/o
forestate o disabitate) cmq in spazio V70 (ad un distanza minima di 50 metri da
persone ad una altezza massima di 70 metri dal suolo e ad un distanza massima
orizzontale di 150 metri dal APR);
• operazioni specializzate svolte in contesti operativi critici (volo su infrastrutture,
assembramenti di persone, zone residenziali e/o industriali) .
Nel primo caso occorre produrre e sottomettere ad ENAC di una documentazione
(Manuale di Volo, Manuale delle Operazioni, Analisi del Rischio, ecc.) da cui si
desuma la non criticità delle operazioni che si intende effettuare, in forma di una
autocertificazione da parte del richiedente; ENAC si limita a prendere atto.
Per operazioni specializzate in contesti operativi critici il percorso autorizzativo è più
complesso ed articolato, e prevede una analisi approfondita da parte di ENAC della
documentazione e successiva emissione di un Permesso di Volo.
• ENAC può prevedere procedure semplificate per i SAPR con massa massima al
decollo minore o uguale a 2 kg.
DIIAR, Laboratorio di Geomatica del Polo Territoriale di Como
59
QUALCHE REALIZZAZIONE
Modelli 3D della Cascina Linterno (MI) (2013)
Rilievo della cascina Linterno per una valutazione qualitativa e
quantitativa dello stato di conservazione dei tetti (1 ha)
Hexakopter Mikrokopter Polimi
Volo realizzato con 4 strisciate a 40 metri di quota di lunghezza
50m e interasse 15m, GSD = 1cm
Cascina Linterno (Mi)
Immagine campione
Modelli 3D della Cascina Linterno (MI) (2013)
Prodotti del rilievo:
• Ortofoto di precisione
• Modello 3D delle coperture e degli
edifici
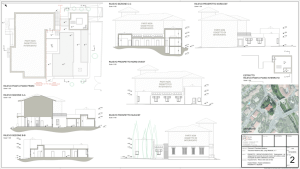
Indagine strutturale e rilievo di ponti e viadotti (2014)
Rilievo di un ponte/viadotto in località «Santa Giulia» come
test per l’applicazione di UAV alla verifica di ponti e viadotti
(0.5 ha)
Hexakopter Mikrokopter Polimi
Immagine campione
Santa Giulia
Milano (MI)
Indagine strutturale e rilievo di ponti e viadotti (2014)
Modello 3D e
DSM superfici
Prodotti del rilievo:
• Modello 3D del ponte
• DSM di spalle e superficie asfaltata
• Ortofoto di precisione del ponte da
vista nadirale e laterale
• Analisi dello stato dell’asfalto
(tramite algoritmi di analisi di imm.)
• Analisi visiva dello stato
conservativo della struttura
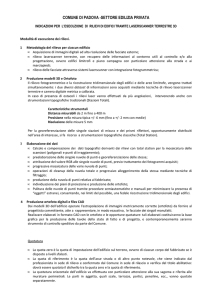
Calcolo di volumi di cava (Gossolengo – PC) (2013)
Rilievo per la misura di volumi di cava a Gossolengo. (PC) (1 ha)
Hexakopter Mikrokopter Polimi
Immagine campione
Gossolengo (PC)
Inquadramento cartografico
Calcolo di volumi di cava (Gossolengo – PC) (2013)
Modello 3D
Prodotti del rilievo:
• Modello 3D
• DSM del cumulo per calcolo
volumi
• Ortofoto
• Comparazione di soluzioni con SW
differenti
• Valutazione di differenti
configurazioni di appoggio
Rilievo RGB + NIR multitemporale aree boscate Parco Adda Nord (2013-14)
Rilievo multispettrale-multitemporale su 10 aree al fine di
valutare la presenza di specie arboree alloctone all’interno del
parco Adda Nord da immagini RGB+CIR (100 ha)
Sensefly swinglet CAM Terradat
Immagini campione
Parco Adda Nord
Inquadramento cartografico
Rilievo RGB + NIR multitemporale aree boscate Parco Adda Nord (2013-14)
Ortofoto CIR
Prodotti del rilievo:
• Modello 3D
• DSM
• Ortofoto
Mulisensore/Multitemporali
• Analisi
multispettrale/multitemporale per
il riconoscimento automatico di
specie alloctone
Rilievo RGB + NIR multitemporale aree boscate Parco Adda Nord (2013-14)
Ortofoto CIR
Prodotti del rilievo:
• Modello 3D
• DSM
• Ortofoto
Mulisensore/Multitemporali
• Analisi
multispettrale/multitemporale per
il riconoscimento automatico di
specie alloctone
Calcolo volume di coltre nevosa (In collaborazione con sez. CIMI) 2013-2014
Rilievo multitemporale su 1 area alpina (alta Valtellina) al fine
di valutare la quantità di neve caduta in un anno (per bilancio
idrologico). (ca 25 ha)
Sensefly swinglet CAM Terradat
Rilievo estivo
Immagini campione
Malghera SO)
Inquadramento cartografico
Calcolo volume di coltre nevosa (In collaborazione con sez. CIMI) 2013-2014
Rilievo multitemporale su 1 area alpina (alta Valtellina) al fine
di valutare la quantità di neve caduta in un anno (per bilancio
idrologico). (ca 25 ha). Problemi di matching su neve
Sensefly swinglet CAM Terradat
Rilievo invernale
Immagini campione
Malghera SO)
Inquadramento cartografico
Calcolo volume di coltre nevosa (In collaborazione con sez. CIMI) 2013-2014
Prodotti del rilievo:
• Modelli 3D
• DSM estivo/invernale
• Ortofoto estiva/invernale
• Calcolo del volume della coltre
nevosa come differenza dei DSM
Modello 3D estivo
Modello 3D invernale
Calcolo volume di coltre nevosa (In collaborazione con sez. CIMI) 2013-2014
Ricostruzione versante (In collaborazione con sez. Geologia e Geoscienze) 2014
Rilievo di una scarpata franosa presso le rive dell’Adda in
località Tirano (Valtellina)
Hexakopter Mikrokopter Polimi
Immagine campione
Tirano
Inquadramento cartografico
Ricostruzione versante (In collaborazione con sez. Geologia e Geoscienze) 2014
Prodotti del rilievo:
• Modello 3D
• Ortofoto del versante
• Calcolo delle quote delle fratture
del terreno
Modello 3D
Rilievo multispettrale della pineta di San Rossore (2013)
Rilievo della pineta di Viareggio presso la riserva naturale di
San Rossore per la valutazione dello stato di salute della
vegetazione
Autogiro
Immagine campione
Viareggio
Inquadramento cartografico
Rilievo multispettrale della pineta di San Rossore (2013)
Prodotti del rilievo:
• Ortofoto RGB + CIR
• Modello 3D
• ……..
Modello 3D CIR
Modello 3D RGB
77
Grazie per l’attenzione