Università del Sannio
Corso di Fisica 1
Lezione 9
Dinamica dei corpi rigidi
Prof.ssa Stefania Petracca
Corso di Fisica 1 - Lez. 09 Dinamica dei corpi rigidi
1
Considerazioni relative al significato del
momento angolare I
Il momento angolare L di un sistema materiale ammette un’interpretazione cinematica solo nel
caso che il sistema sia dotato di opportune proprietà strutturali; in particolare nel caso dei sistemi
rigidi: Ora vogliamo analizzare il caso di sistemi materiali non necessariamente rigidi, ma
particolarmente semplici, di modo che l’interpretazione cinematica di L risulti immediata. Le
considerazioni fisiche che faremo a proposito di questi sistemi materiali semplici consentiranno
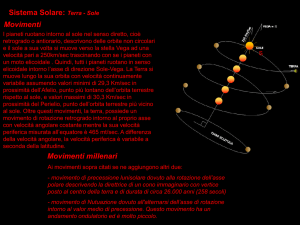
di capire meglio anche casi più complessi. Cominciano con l’analizzare un sistema costituito da
due masse uguali, praticamente puntiformi, collegate l’una all’altra mediante una sbarretta
orizzontale di massa trascurabile e ruotanti intorno ad un asse verticale fissato nel punto di
mezzo della sbarretta orizzontale (punto O). La sbarretta è tale da mantenere inalterata la
distanza tra le due masse, durante il moto. Se la sbarretta orizzontale ha la lunghezza 2 d, ognuna
delle due masse compie un moto circolare con velocità di modulo v = ω d, dove ω è la velocità
angolare. Il momento angolare L del sistema rispetto al polo O risulta evidentemente
L = l1 + l 2 = d1 × mv1 + d 2 × mv 2 = 2md 2ω
Notiamo che fissata la geometria (cioè il coefficiente 2md2), il momento angolare risulta
proporzionale alla velocità angolare ω.
L = kω
Corso di Fisica 1 - Lez. 09 Dinamica dei corpi rigidi
2
Considerazioni relative al significato del
momento angolare II
Se vogliamo cambiare la velocità angolare ω dobbiamo cambiare L e dunque deve essere dL / dt
diverso da zero; e considerando la seconda legge cardinale della dinamica dobbiamo applicare
delle forze il cui momento risultante non sia nullo. Se per semplicità supponiamo di non voler
far muovere il punto O (cioè il centro di massa del sistema), deve trattarsi di un sistema di forze
con risultante F(e) nullo: una coppia. Se volgiamo modificare il modulo della velocità angolare
(cioè il modulo di L) senza cambiare la direzione, allora dL / dt deve essere parallelo ad L e
dunque anche M(e) deve essere parallelo a L: la coppia deve essere cioè tale che il suo momento
sia parallelo all’asse di rotazione (coppia motrice o coppia resistente a seconda che si voglia
aumentare o diminuire il modulo di ω). Invece se volgiamo cambiare la direzione di L (e di ω)
senza cambiarne il modulo, allora dL / dt deve essere ortogonale a L: anche il momento della
coppia deve essere dunque ortogonale all’asse. Supponiamo ora che il sistema costituito dalle
due masse rotanti sia un sistema libero, cioè sottoposto ad alcune sollecitazione esterna. Si ha
allora, in particolare M(e) = 0, e dunque L = costante. Se la geometria del sistema non cambia
allora possiamo concludere che la velocità angolare ω rimane costante indefinitivamente. Il fatto
che nella realtà, un tale sistema, una volta messo in rotazione e abbandonato a sé, rallenti
progressivamente fino a fermarsi, denuncia in effetti la presenza di un momento frenante
esercitato dalle forze di attrito: momento frenante che nella nostra presente schematizzazione
supponiamo essere trascurabile.
Corso di Fisica 1 - Lez. 09 Dinamica dei corpi rigidi
3
Considerazioni relative al significato del
momento angolare III
Mantenendo dunque il sistema isolato (M(e) = 0), modificandone la geometria in virtù di forze
interne: ad esempio supponiamo che le due masse possano scorrere sulla sbarretta, e che
vengano attratte verso O fino a che la loro distanza dall’asse di rotazione non dimezzi: d’ = d / 2.
Nella configurazione finale, il momento angolare L’ sarà dato da
2
L' = 2md ' ω'
D’altra parte, poiché il cambiamento di configurazione è avvenuto in virtù di sole forze interne,
(e dunque dL / dt = 0) il momento angolare deve essersi conservato: L’ = L; e dunque
2md '2 ω' = 2md 2ω
2
⎛d⎞
ω' = ⎜ ⎟ ω
⎝ d'⎠
E poiché nel nostro caso d / d’ = 2, si ottiene ω’ = 4 ω: il cambiamento di configurazione (in
virtù delle forze interne) di un sistema liberamente ruotante, si accompagna a variazioni della
velocità angolare ω.
Corso di Fisica 1 - Lez. 09 Dinamica dei corpi rigidi
4
Considerazioni relative al significato del
momento angolare IV
Corso di Fisica 1 - Lez. 09 Dinamica dei corpi rigidi
5
Considerazioni relative al significato del
momento angolare V
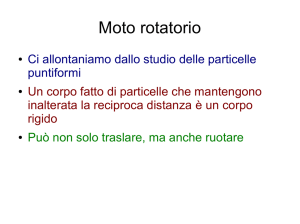
Consideriamo ora un altro semplice esempio: la stessa configurazione precedente ma ora
l’angolo tra la sbarretta e l’asse di rotazione è θ. Calcoliamo il momento angolare L del sistema
sempre rispetto al polo O. Le due masse compiono un moto circolare uniforme di raggio r = d
cos θ; per entrambe il modulo della velocità (costante) vale v = ω d cos ω. Entrambi i vettori
velocità sono ortogonali al piano formato dalla sbarretta e dall’asse di rotazione, e dunque sono
ortogonali a d1 e d2. Tuttavia considerato che anche d1 e d2 hanno verso opposto, i momenti
angolari dei due punti l1 = d1 × m v1 e l2 = d2 × m v2 sono tra loro concordi e uguali, sono
contenuti nel piano formato dalla sbarretta e dall’asse di rotazione, ed hanno la direzione della
normale n alla sbarretta; il loro modulo vale:
2
l = dmv = dmωd cos θ = md cos θω
In definitiva si ottiene che
L = 2md ωnˆ
2
Osserviamo che in questo caso L non ha la stesa direzione di ω. Notiamo, ora, che se ω è
costante il modulo L di L è ancora costante; tuttavia non è vero per il vettore L: infatti il versore
normale alla sbarretta descrive un moto a cono con apertura angolare pari a θ.
Corso di Fisica 1 - Lez. 09 Dinamica dei corpi rigidi
6
Considerazioni relative al significato del
momento angolare VI
Di conseguenza il vettore dL/dt è diverso da zero e dunque il momento esterno M(e) è diverso da
zero. Se la sbarretta non è ortogonale all’asse di rotazione (cioè se θ ≠ 0), il moto può avvenire
solo se si applicano al sistema delle forze esterne con momento non nullo. Per un’ulteriore
precisazione, scomponiamo la seconda legge cardinale della dinamica lungo un asse parallelo ed
un ortogonale ad ω
⎧ ( e ) dL P
⎪M p = dt
⎨
dL n
⎪ M n (e) =
dt
⎩
Vediamo che la componente Lp di L è parallela ad ω (che è costante); quindi la derivata
temporale deve essere nulla
⎧ M p (e) = 0
⎪
⎨ ( e ) dL n
⎪⎩M n = dt
Per mantenere in rotazione il sistema non è necessaria nessuna coppia motrice.
Corso di Fisica 1 - Lez. 09 Dinamica dei corpi rigidi
7
Considerazioni relative al significato del
momento angolare VII
Il vettore Ln, componente di L normale all’asse di rotazione, rappresenta invece un vettore
rotante (ortogonale all’asse) di modulo costante: la sua derivata dLn /dt è dunque anch’essa un
vettore rotante (ortogonale a Ln), e tale deve essere anche Mn(e) : per esercitare tale momento, i
cuscinetti che sostengono l’asse sono costretti a esplicare due forze f1 e f2, fra di loro uguali ed
opposte , e anch’esse rotanti. E’ l’effetto di queste forze di un’automobile le cui ruote anteriori
non siano bene equilibrate.
Corso di Fisica 1 - Lez. 09 Dinamica dei corpi rigidi
8
Momento della forza gravitazionale
Corso di Fisica 1 - Lez. 09 Dinamica dei corpi rigidi
9
Definizione di corpo rigido I
Molti oggetti sono sostanzialmente indeformabili e possono essere descritti, con
approssimazione adeguata alla maggior parte degli scopi, tramite la schematizzazione di corpo
rigido. Un corpo rigido è un sistema materiale (continuo) rigorosamente indeformabile: la
distanza relativa di due qualunque punti costituenti un corpo rigido è immutabile.
Un corpo rigido libero di muoversi nello spazio presenta sei gradi di libertà: una volta specificata
la posizione di un suo punto (il che richiede che si fissi il valore di tre coordinate), il corpo può
ancora ruotare attorno ad un asse qualunque passante per quel punto. Per fissare le direzione di
un asse solidale col corpo e passante per quel punto è necessario specificare due angoli; ed un
terzo angolo è necessario per specificare l’angolo di rotazione intorno a quel asse (come una
porta che ruota intorno all’asse individuato dai suoi cardini).
Il moto di un corpo rigido non può essere influenzato dalle forze interne: queste infatti, essendo
costituite da un insieme di coppie di braccio nullo, tenderebbero semplicemente a far mutare le
distanze relative fra i costituenti del corpo rigido; ma queste distanze relative non possono
cambiare. Ci aspettiamo dunque che il moto di un corpo rigido sia governato dalle equazioni
cardinali della dinamica, che hanno al primo membro delle quantità caratteristiche delle sole
forze esterne (risultante e momento risultante). In effetti, il moto di un corpo rigido è
completamente descritto dalle equazioni cardinali. Esse infatti costituiscono nel loro insieme 6
equazioni scalari fra loro indipendenti.
Corso di Fisica 1 - Lez. 09 Dinamica dei corpi rigidi
10
Definizione di corpo rigido II
La prima delle equazioni cardinali governa il moto del baricentro (o centro di massa) del sistema
rigido; la seconda governa le rotazioni (ad esempio intorno al baricentro) come si può intuire
ricordando le considerazioni che abbiamo fatto sul significato cinematico del momento angolare.
Come per qualunque altro sistema materiale, così anche per un sistema rigido si definisce
posizione di equilibrio una configurazione tale che, disponendo in essa, fermo, il sistema
materiale, esso permane fermo in tale configurazione. Tuttavia, mentre nel caso generale è
necessario assicurarsi che ognuno dei singoli punti costituenti il sistema sia in equilibrio, nel
caso di un sistema rigido l’equilibrio è garantito dalla condizione che non si muova il centro di
massa, e che il sistema non ruoti attorno ad esso. Per conseguenza, condizione necessaria e
sufficiente perché una posizione sia posizione di equilibrio per un corpo rigido, e che in tale
posizione siano nulli il risultante F(e) e il momento M(e) delle forze esterne applicate al sistema.
La condizione è necessaria: infatti se F(e) e/o M(e) sono diversi da zero, sono diversi da zero
dQ/dt e/o dL/dt. Pertanto, se inizialmente il sistema è fermo, esso si mette in movimento: il
risultante delle forze esterne produce il moto del baricentro, e il momento risultante produce le
rotazioni.
La condizione è sufficiente: infatti se F(e) e M(e) sono nulli, sono nullo anche dQ/dt e dL/dt. E
dunque, se inizialmente il sistema era fermo (e dunque Q = 0 e L = 0), resta dunque Q = 0 e L
= 0 anche negli istanti di tempo successivi, e queste sono sei condizioni cinematiche fra di loto
indipendenti che garantiscono che tutti i punti del sistema restino fermi al passare del tempo.
Corso di Fisica 1 - Lez. 09 Dinamica dei corpi rigidi
11
Momento angolare rispetto al baricentro e
momento di inerzia I
Vogliamo estendere al coso dei sistemi rigidi le considerazione sviluppate nel caso dei sistemi di
punti materiali. In effetti l’unica differenza che abbiamo dal caso precedente è che ora abbiamo
una distribuzione continua di materia, mentre in precedenza avevamo una distribuzione discreta.
La generalizzazione è presto fatta se sostituiamo al concetto di somma quella dell’integrale ed
anche in questo ultimo caso è possibile ottenere una relazione di proporzionalità tra il momento
angolare totale (di una distribuzione di materia) L ed il vettore velocità angolare ω (avendo
scelto come asse di rotazione un asse di simmetria dei corpo rigido!):
L = Iω
Dove I è detto momento di inerzia rispetto all’asse preso in considerazione per la rotazione ed è
definito dalla relazione
I = ∫ h 2 dm
Il momento d’inerzia corrisponde ad una proprietà geometrica del corpo rigido considerato ed è
diverso da corpo a corpo. Infatti che la velocità angolare ω è costante allora anche L è costante
poiché I non risente della dinamica del corpo. Quindi giungiamo alla conclusione che dL/dt = 0
e non vi è un risultante dei momenti diverso da zero: per mantenere il corpo in rotazione con
velocità angolare costante intorno all’asse di simmetria non è necessario applicare ad esso alcun
momento delle forze esterne.
Corso di Fisica 1 - Lez. 09 Dinamica dei corpi rigidi
12
Momento angolare rispetto al baricentro e
momento di inerzia II
Ma dato che il centro di massa si trova sull’asse di rotazione (il centro di massa è sempre
sull’asse di simmetria per un corpo con qualche particolare simmetria) non è in moto e quindi
resta fermo dQ/dt = F(e) = 0. Il corpo può ruotare liberamente intorno all’asse di simmetria e non
vi è bisogno di nessuna sollecitazione esterna per mantenere inalterato il moto nel tempo. Ogni
asse che gode di questa proprietà è detto asse libero di rotazione o asse centrale di inerzia.
Il calcolo del momento d0inerzia di un corpo rispetto ad un asse qualsiasi può essere effettuato
con tecniche simili a quelle introdotte per il calcolo del centro di massa. Infatti per calcolare
esplicitamente il momento di inerzia bisogna riscrivere l’elemento di massa in termini della
densità di massa (che è una funzione del punto) e pi estendere il calcolo dell’integrale a tutto lo
spazio occupato dal corpo:
I = ∫ h 2 dm = ∫ h 2 ρ ( x, y, z )dτ = ∫ h 2 ρ ( x, y, z )dxdydz
L’integrando h2ρ risulta essere una funzione della posizione; e l’integrale può essere eseguito pur
di esprimere ρ, h e dτ in funzione delle stesse variabili. Qualora il corpo fosse schematizzabile
come un corpo bidimensionale o unidimensionale otteniamo le rispettive relazioni
⎧ h 2σ ( x, y )dS = h 2σ ( x, y )dxdy
∫
⎪∫
2
I = ∫ h dm = ⎨
oppure
⎪
x 2 λ ( x)dx
∫
⎩
Corso di Fisica 1 - Lez. 09 Dinamica dei corpi rigidi
13
Momento angolare rispetto al baricentro e
momento di inerzia III
Quando di un corpo rigido ci sia noto il momento di inerzia Ic rispetto ad un asse noto (c)
passante per il centro di massa, il momento di inerzia I rispetto ad un altro asse (a) parallelo a c
può essere facilmente calcolato mediante il teorema di Huygens – Steiner secondo il quale
I = I c + Md 2
dove M è la massa totale del sistema e d la distanza fra l’asse a e l’asse c. E’ da notare che a
parità di massa, la rotazione è caratterizzata dalla distribuzione della massa attorno all’asse di
rotazione. Il momento di inerzia cambia al cambiare della posizione dell’asse. Infatti, nel primo
esempio abbiamo I = 1/3 M L2, ma se l’asse di rotazione cambia, come nel secondo caso, anche
il momento cambia: I = 1/12 M L2. Infine cambiando ancora una volta l’asse di rotazione
otteniamo I = 1/12 M (a2+b2). Per una sfera omogenea abbiamo I = 2/5 M R2.
Corso di Fisica 1 - Lez. 09 Dinamica dei corpi rigidi
14
Energia cinetica di un sistema rigido
L’energia cinetica di un sistema rigido che ruoti intorno ad un asse a assume una forma
particolarmente semplice in termini del momento di inerzia Ia e della velocità angolare ω. La
velocità v dell’elemento dm, che si muove su traiettoria circolare di raggio h, ha infatti modulo v
= ω h; e dunque il relativo contributo dK dell’energia cinetica K del sistema vale
dK =
1
1
dmv 2 = dmh 2ω 2
2
2
Dunque l’energia cinetica totale del sistema è
ω2
1
1
2 2
2
2
K = ∫ dK = ∫ dmh ω =
dmh
=
I
ω
a
2
2 ∫
2
Utilizzando il teorma di Koenig (K = ½ M vc2 + K’) unito all’espressine appena ricavata, anche
nel caso generale l’energia cinetica di un sistema rigido assume un’espressione particolarmente
semplice. In un sistema baricentrale, il sistema compie infatti in ogni istante una rotazione
intorno ad un asse c; per cui otteniamo:
1
1
2
2
K = Mvc + Iωc
2
2
Dove Ic è il momento di inerzia rispetto all’asse (istantaneo) di rotazione.
Corso di Fisica 1 - Lez. 09 Dinamica dei corpi rigidi
15
Moto di puro rotolamento I
Questo tipo di moto è quello compiuto da una ruota circolare (sia r il suo raggio) che ruota senza
strisciare a contatto con la strada: il sistema ruota con velocità angolare ω = ω u intorno all’sse
principale di inerzia u passante per il centro di massa C ortogonale alla ruota, e nello stesso
tempo il centro di massa si muove rispetto al terreno con velocità vC, ortogonale all’asse e
parallela al terreno stesso. Benché il sistema (che per semplicità schematizziamo come un disco
piano) sia dotato di moto di rotazione intorno a un asse che a sua volta trasla, esso è dotato di un
solo grado di libertà. Infatti, per conseguenza del fatto che un punto A della ruota a contatto col
terreno non striscia (dunque è, istante per istante, fermo rispetto al terreno), la velocità angolare
ω della ruota e la velocità vC dell’asse (e dunque del centro di massa della ruota) non sono fra di
loro indipendenti, ma sono legati dalla relazione ω r = vC che in termini vettoriali: r × ω = vC.
Che la velocità angolare e la velocità del centro di massa siano cosi legate è comprensibile anche
intuitivamente, sia ponendosi dal punto di vista solidale con il centro di massa (nel qual caso si
vede la periferia della ruota, e con essa il terreno, procedere con velocità ω r), che dal punto di
vista solidale con il punto di contatto (A) (nel qual caso si vede il sistema che ruota con velocità
angolare ω intorno al punto di contatto, che pur essendo da istante ad istante diverso, è in ogni
istante fermo: vA = 0). In base a questi ragionamenti, si conclude che il punto (B)
diametralmente opposto al punto di contatto si muove con velocità vB = 2 ω r = 2 vC.
Corso di Fisica 1 - Lez. 09 Dinamica dei corpi rigidi
16
Moto di puro rotolamento II
Poiché la ruota è un sistema ad un sol grado di libertà, basta una sola equazione dinamica,
opportunamente scelta, per determinare la legge del moto; le altre equazioni dinamiche possono
essere usate per calcolare le reazioni vincolari. Va notato che usualmente la ruota è costruita in
modo che l’asse di rotazione sia un suo asse centrale di inerzia (e noi supporremo di trovarci
sempre in queste condizioni).
Corso di Fisica 1 - Lez. 09 Dinamica dei corpi rigidi
17
Ricapitolando …
Nello studio del moto dei sistemi di corpi o di corpi estesi, la traslazione viene regolata dalle
leggi di Newton applicate al centro di massa, che è il punto reale o ideale in cui si considera
concentrata la massa e intervengono solo le forze esterne (quelle esercitate da corpi esterni al
sistema considerato). Le forze interne, che si presentano sempre come forze di azione a
reazione, si annullano e non contribuiscono al moto. La rotazione del corpo intorno a qualche
asse (passante per il centro di massa o un asse che vincola il moto) viene descritta dal
momento delle forze esterne, e l’accelerazione angolare dipende dalla distribuzione della
massa attorno all’asse di rotazione attraverso il centro di inerzia. Il principio di conservazione
dell’energia meccanica deve essere applicato tenendo conto dell’energia cinetica di rotazione,
oltre che quella di traslazione e delle energie potenziali. Si sono introdotti due nuovi principi:
conservazione della quantità di moto (somma delle forze esterne = 0), conservazione del
momento angolare (somma momenti esterni = 0). Se il corpo è inizialmente fermo, questi
sono i principi che regolano la statica dei corpi.
Corso di Fisica 1 - Lez. 09 Dinamica dei corpi rigidi
18