La Misura in Fisica
La fisica si occupa della comprensione razionale di alcuni fenomeni
naturali. Lo strumento principale che essa adotta nello studio di tali
fenomeni è la matematica. Le leggi fisiche sono formulate
matematicamente tramite equazioni che stabiliscono relazioni fra le
grandezze fisiche. Tali leggi nascono dallʼosservazione e dalla
misurazione dei fenomeni naturali.
Definizione
Una grandezza fisica è tutto ciò che si può determinare
quantitativamente (che può essere misurato). Per definire una
grandezza fisica è perciò necessario stabilire come si misuri. Si
dice quindi che la definizione di una grandezza fisica è una
definizione operativa.
La misura di una grandezza fisica viene effettuata confrontandola
con una grandezza ad essa omogenea che viene chiamata unità di
misura. Per grandezza omogenea si intende un oggetto o un
fenomeno fisico che ha la stessa proprietà caratteristica della
grandezza fisica da misurare.
Lʼunità di misura deve essere:
- confrontabile: deve essere facilmente confrontabile con le
grandezze che misurerà;
1
- riproducibile: deve essere facilmente riproducibile in modo da
poterla utilizzare in più di una misura;
- immutabile nel tempo (e nello spazio): deve dare lo stesso
risultato per la stessa grandezza in ogni punto dello spazio ed in
ogni istante di tempo;
Al termine di una misura una grandezza fisica viene associata ad
un numero e allʼunità di misura adottata.
Esempi:
Lunghezza"
"
"
Unità di misura"
METRO (m)
Tempo"
"
"
Unità di misura"
SECONDO (s)
Corrente Elettrica" "
Unità di misura"
Ampère (A)
"
A
B
Sole
Terra
Terra
C
Figura 2.1
Stella
2
Le unità di misura sono state definite in modo man mano più
assoluto e preciso negli anni.
Il metro fu originariamente definito come la quarantamilionesima
parte del meridiano terrestre (1971). Tale definizione è stata
sostituita nei tempi più recenti dalla seguente: il metro è la distanza
percorsa dalla luce nel vuoto in 1/299792458 di secondo (1983).
Il secondo è stato originariamente (1960) definito come la 1/86400
parte della durata del giorno solare medio (in particolare quello del
1900). Oggi è definito come un multiplo del periodo della radiazione
elettromagnetica emessa dal Cesio 133 in una particolare
transizione (1967).
3
Misure Dirette-Indirette
Le misure dirette sono quelle ottenute tramite il confronto diretto
con una unità di misura (o un suo multiplo o sottomultiplo).
Non sempre è tuttavia possibile fare misure dirette. Si pensi ad
esempio a dover determinare la distanza di una stessa o di un
punto non accessibile. In questi casi si misurano direttamente delle
grandezza che sono legate matematicamente alla grandezza da
misurare.
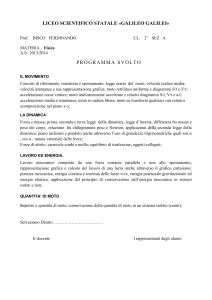
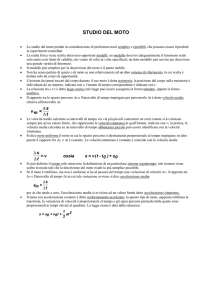
Esempio (vedere figura 2.1)
Per determinare la distanza della stella in C si utilizzano
considerazioni sul moto terrestre ed un poʼ di geometria: la terra
ruota intorno al sole in 365 giorni (circa). Se misuriamo gli angoli A
e B del triangolo ABC in due punti opposti dellʼorbita e conosciamo
la misura della distanza AB allora adottando il teorema dei seni:
AB
BC
AC
=
=
.
sin(180 ° −  − B̂) sin  sin B̂
Le distanze AC e BC risultano quindi perfettamente determinate.
Esistono grandezze fisiche che si definiscono operativamente in
modo indiretto. Un esempio è la massa!
4
La massa (o massa inerziale) è la proprietà di un corpo legata
allʼaccelerazione che esso subisce quando soggetto ad una forza.
Essa si misura in chilogrammi (Kg).
Per determinare la massa di un corpo è necessario imprimere una
forza nota F a tale corpo e calcolare lʼaccelerazione a cui è
sottoposto. La massa sarà data da
|| F ||
m= .
|| a ||
Si noti che la massa di un corpo è una proprietà intrinseca del
corpo ed è profondamente diversa dal peso (che comunemente ed
erroneamente si confonde con essa). Il peso è una forza e si
misura in Newton (unità di misura della forza). Operativamente il
peso di un corpo si misura tramite una bilancia; la bilancia misura,
tramite la deformazione di una molla, il peso di un corpo. Tale
misura darà risultati differenti a seconda che ci troviamo sulla terra
o sulla luna quindi il peso di un corpo non è una proprietà intrinseca
di quel corpo poiché, ad esempio, dipende dalla sua posizione nello
spazio.
Tuttavia in prossimità della superficie terreste massa e peso di un
corpo sono proporzionali rispetto alla costante || g || ed è per questo
che comunemente vengono confusi.
5
In generale le leggi fisiche esprimono relazioni fra grandezze fisiche
e quindi fra unità di misura. Eʼ per questo che alcune grandezze
fisiche si possono scegliere come FONDAMENTALI ed altre come
DERIVATE da esse. In genere vengono scelte come fondamentali
le grandezze fisiche che permettono di definire operativamente in
modo semplice la le grandezze fisiche derivate. Fissare le
grandezze fondamentali equivale a scegliere un SISTEMA DI
MISURA.
Il sistema di misura comunemente adottato in fisica è il sistema
internazionale (S.I.). Esso adotta metro, chilogrammo, secondo
come grandezze fondamentali (M.K.S.).
Teoria degli Errori
Nella misura diretta delle grandezze fisiche si pone un problema:
quando misuriamo una grandezza è possibile produrre un numero
che rappresenti lʼesatto risultato della misura? Lʼesperienza ci
insegna che non è possibile...
Esempio
Immaginate di dover misurare la lunghezza del lato di una stanza
con un metro che riporta divisioni in centimetri. Vi potete rendere
conto, se la lunghezza della stanza è abbastanza grande rispetto al
metro, che non è assolutamente banale ottenere lo stesso risultato
in due misure successive! Non solo: anche ammettendo di riuscire
6
a riprodurre la stessa misura più volte, probabilmente si porrà il
problema di dover discriminare fra due divisioni successive sul
metro poiché, ad esempio, la stanza risulterà compresa fra le
divisioni che indicano 5,65 m e 5,66 m.
In questo caso la ripetibilità della misura è dovuta al fatto che le
divisioni sul metro sono piuttosto grossolane ma ciò porrà il
problema di non poter discriminare il risultato della misura a meno
di 1 centimetro (saremo solo in grado di affermare che la stanza
misura fra 5,65 m e 5,66 m).
Adottare un metro diviso più finemente (ad esempio suddiviso in
intervalli di un millimetro) porterebbe, in linea teorica, ad esprimere
la misura utilizzando un intervallo di un millimetro (o addirittura ad
avere lʼillusione di aver ottenuto un risultato esattamente in
corrispondenza di una tacca millimetrata) ma in questo caso sarà
sicuramente molto più difficile ottenere lo stesso risultato ripetendo
la misura più volte!
Ogni misura è dunque soggetta ad un errore. Per errore si intende
unʼincertezza legata alle imperfezioni del processo di misura. Tali
imperfezioni possono essere mascherate dalla scarsa sensibilità
dello strumento di misura (come nel caso del metro suddiviso in
centimetri) ma anche in quel caso è evidente che non è possibile
esprimere il risultato di una misura come un numero senza
incertezze.
7
Perciò è necessario imparare a gestire questi errori includendoli nel
risultato di una misura.
Esistono due tipi di errori: gli errori sistematici e gli errori casuali (o
accidentali). Gli errori sistematici sono quelli che avvengono
sempre per eccesso o sempre per difetto e sono dovuti ad errori di
metodo o a problemi strumentali. Gli errori casuali possono
avvenire sia in eccesso che in difetto e dipendono dalla
imperfezioni incontrollabili nel processo di misura.
Esempio 1
Si misuri il lato di una stanza.
- Possibile errore sistematico: il metro adottato non è conforme al
metro campione.
- Possibile errore casuale: imperfezioni varie nella lettura e nel
posizionamento del metro.
Esempio 2
Misura della velocità media di un auto
- Possibile errore sistematico: il metro ed il cronometro adottati non
sono conformi.
- Possibile errore casuale: imperfezioni varie nella misura della
distanza percorsa dallʼauto; imprecisioni a fare partire-fermare il
cronometro in corrispondenza della partenza-arrivo dellʼauto; il
8
cronometro magari misura i centesimi di secondo quindi non è in
grado di discriminare intervalli di tempo più piccoli.
Esempio 3
Misura della profondità di un pozzo
La misura della profondità di un pozzo non può essere effettuata
direttamente, tuttavia è possibile misurare indirettamente tale
profondità, ad esempio, facendo cadere un sasso nel pozzo e
cronometrando il periodo che intercorre fra lʼistante in cui il sasso
viene lasciato andare e lʼistante in cui si percepisce il suono del
sasso che cade nellʼacqua del pozzo. Ovviamente il pozzo sarà
tanto più profondo quando maggiore sarà lʼintervallo di tempo fra i
due istanti.
- Possibile errore casuale: la partenza e lo stop del cronometro
sono ovviamente soggetti a possibili imprecisioni dovute al fatto che
è impossibile essere certi di riuscire a mantenere lʼesatto
sincronismo dei movimenti.
- Possibili errori sistematici:
I) imperfezioni negli strumenti di misura (cronometro);
II) imperizia nel trascurare la velocità del suono: lʼistante in cui
percepiamo il suono del sasso non è esattamente quello in cui il
sasso ha toccato lʼacqua. Questo dipende dal fatto che il suono si
propaga dallʼacqua al nostro orecchio con una certa velocità
(circa 1000 Km/h) e quindi deve essere scorporato un certo
intervallo di tempo dal valore segnato dal cronometro;
9
III) imperizia nel trascurare la resistenza dellʼaria: il sasso cade nel
pozzo che non è vuoto, quindi il suo moto di caduta è quello di un
grave in un fluido con una certa resistenza. Trascurare tale effetto
può portare ad una sovrastima della profondità del pozzo e
corrisponde quindi ad un certo intervallo di tempo da scorporare
dal valore segnato dal cronometro;
IV) imperizia nel trascurare il tempo di reazione: fra lʼistante in cui
percepiamo il suono e lʼistante in cui fermiamo il cronometro
intercorre un breve intervallo di tempo che corrisponde al nostro
tempo di reazione. Tale intervallo (dellʼordine del decimo di
secondo) va scorporato dal valore segnato dal cronometro.
Ovviamente le fonti dei possibili errori sistematici sono diverse
come emerge da questʼultimo esempio. Si tratta ovviamente di
capire quali effetti sistematici abbiano un effetto decisivo nella
misura e quali incidono poco rispetto alla precisione dello strumento
di misurazione. Nel caso del pozzo gli effetti II) e III) sono
decisamente trascurabili rispetto a IV) specialmente se la profondità
del pozzo non è eccessiva.
Si noti infine che ogni volta che facciamo una misura in qualche
modo alteriamo il fenomeno fisico che stiamo misurando. Questo
succede poiché il processo di misura prevedere unʼinterazione con
la grandezza fisica che si osserva che viene perciò alterata in modo
più o meno evidente. Si pensi ad esempio a voler misurare con un
calibro un sottile strato di metallo: anche ammettendo che il calibro
10
sia sistemato in modo ottimale la pressione del calibro sulla lastra
avrà lʼeffetto di modificarla nel punto di contatto e renderà una
misura dello spessore un poʼ “schiacciata”. Lʼeffetto di questa
interazione è tanto maggiore quanto più piccoli sono gli oggetti con
cui dobbiamo misurare e nel mondo della fisica microscopica ha
unʼimportanza tale che la stessa teoria (meccanica quantistica) che
descrive la dinamica del mondo subatomico ne ha dovuto tenere
conto. (principio di indeterminazione di Heisenberg)
Preso dunque atto che gli errori non si possono eliminare
completamente risulterà opportuno indicare il risultato di una misura
con un intervallo di valori piuttosto che con un valore unico.
Scriveremo che la grandezza x è
x = x ± Δx
indicando con il numero x
il valore centrale (e più probabile)
dellʼintervallo [ x − Δx, x + δ x ] e con Δx lʼerrore.
Problema
Come è possibile da una misura o una serie di misure produrre un
risultato del tipo espresso sopra? E come è possibile ottimizzare
lʼerrore in modo che lʼintervallo sia il più piccolo possibile (e quindi
la misura più precisa)?
Ovviamente i fenomeni fisici e le grandezze ad essi associate sono
molto differenti fra di loro. Quando è possibile (se la misura è
ripetibile molte volte) la cosa migliore da fare è eseguire quante più
11
misure possibile. Come già detto molte misure con uno strumento
molto sensibile porteranno ad una tabella di dati (diversi fra di loro
ma tutti intorno ad un certo valore). Se ad esempio facciamo N
misure otterremo per ogni misura un numero xi . Il valore più
probabile, x , si ottiene quindi facendo la media aritmetica degli xi
ovvero:
N
x=
∑x
i
i=1
N
.
A questo punto ci sono possibilità diverse di calcolare Δx . I metodi
più comuni sono:
(1) adottare la “semi-dispersione massima” ovvero la semidifferenza fra il maggiore ed il minore degli xi . In questo caso
Δx =
xmax − xmin
;
2
(2) adottare la “media aritmetica degli scarti in valore assoluto”. Lo
scarto per definizione è dato da Δxi = xi − x
quindi il metodo
N
consiste nellʼadottare Δx =
∑ Δx
i
i=1
N
;
N
(3) adottare lo “scarto quadratico medio” dato da Δx =
∑ Δx
2
i
i=1
N −1
.
12
In genere quando il numero delle misure è basso si adotta il metodo
a) altrimenti il metodo c) è quello preferito. Il metodo a) tende a
sovrastimare lʼerrore e quindi meglio non utilizzarlo se possibile.
Quando invece la misura non è ripetibile allora x è il valore segnato
dallo strumento e Δx è il minimo intervallo che lo strumento riesce a
discriminare; oppure se lo strumento di misura permette di leggere
lʼintervallo in cui cade la misura allora si adotta come x il valore di
mezzo dellʼintervallo e come Δx la sua semi-lunghezza.
Esempio 1:
Nel caso si misuri il tempo di caduta di una foglia da un albero con
un cronometro che è in grado di misurare i decimi di secondo sarà
opportuno assumere come x
il valore segnato dal cronometro e
come Δx il decimo di secondo.
Esempio 2:
Nel caso si misurino le dimensioni di un foglio di carta con un
righello millimetrato (misura ripetibile ma immaginiamo per un
attimo che non sia tale) allora sarà possibile discriminare dalle
divisioni sul righello entro quale intervallo cadano le dimensioni del
foglio (ad es. 21,5 cm e 21,6 cm) e quindi si adotterà, per lʼesempio
citato, x = 21, 55cm e Δx = 0, 05cm .
13
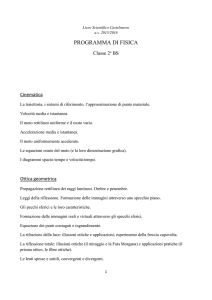
Se facciamo molte misure di una grandezza fisica e le
rappresentiamo con un istogramma scopriamo una caratteristica
molto interessante del comportamento degli errori casuali.
Immaginiamo si misurare il lato di una stanza con un metro
millimetrato. Per ogni millimetro creiamo un bin sul nostro
istogramma e contiamo su ogni bin le misure che hanno reso quel
determinato valore. Si verrà a formare un istogramma con una
forma piuttosto caratteristica
Misura della stanza
150
100
50
0
5,25 m 5,26m 5,27m 5,28m 5,29m 5,30m 5,31m 5,32m 5,33m
La curva che fitta questo istogramma ha la forma di quella che si
chiama funzione Gaussiana:
f (x) = A e
−
( x− xv )
2 µ2
dove xv è il presunto valore “vero” della grandezza fisica ed è molto
vicino a x quando il numero delle misure è molto grande, mentre σ
14
si chiama deviazione standard ed è molto vicino allo scarto
quadratico medio quando il numero delle misure è grande. La
funzione Gaussiana (o di Gauss) è la curva degli errori ovvero gli
errori casuali di una operazione di misura si distribuiscono
seguendo la legge descritta da questa funzione.
15
CINEMATICA
La cinematica si occupa dello studio del moto dei corpi. In generale
la cinematica si interessa semplicemente della descrizione del moto
dei corpi e non del motivo per cui essi assumono le traiettorie
osservate.
Il primo problema che poniamo è dunque quello di definire la
posizione di un punto nello spazio. Si noti anzitutto che il concetto
di posizione assoluta di un punto nello spazio non ha senso.
Quando parliamo della posizione di un punto ci riferiamo sempre
alla posizione del punto rispetto ad un altro punto scelto come
riferimento. Per descrivere matematicamente la posizione
possiamo :
i) fissare un sistema di riferimento cartesiano con con origine nel
punto scelto come riferimento e tre assi ortogonali di
orientamento arbitrario. La posizione del punto sarà definita
univocamente da una terna ordinata di numeri che rappresentano
le coordinate (x, y, z) del punto nel sistema di riferimento scelto.
ii) costruire il vettore posizionale. Il vettore posizionale è il vettore
che congiunge lʼorigine al punto (con coda nellʼorigine)
Le due descrizioni sono equivalenti. Si considerino infatti i tre
versori ortogonali iˆ, ĵ, k̂ con le stesse direzioni e verso degli assi
cartesiani del sistema di riferimento del punto i). Esprimendo le
componenti del vettore posizionale del punto ii) usando questi tre
versori otterremo proprio che le tre componenti sono (x, y, z) ovvero
16
le coordinate del punto. Ovviamente una qualsiasi terna di versori
ortogonali può essere adottata per esprimere il vettore posizionale
per componenti. Terne differenti corrisponderanno a componenti
differenti (ma il vettore risultante dalla sovrapposizione sarà sempre
lo stesso).
Risulta perciò evidente che per definire univocamente la posizione
di un punto sono necessari 3 numeri. Si ricordi comunque che i 3
numeri non hanno significato se non si specificano 3 assi orientati
ed unʼorigine rispetto ai quali dare significato ai 3 numeri.
Arriviamo a questo punto al problema di descrivere il movimento di
un punto materiale. Studiare il moto di un punto materiale significa
registrare la sua posizione al variare del tempo. Quando un punto si
muove le sue coordinate cambiano nel tempo o equivalentemente il
vettore posizionale varia nel tempo. Il punto descrive una traiettoria.
La traiettoria è lʼinsieme delle posizioni occupate dal punto
materiale durante il moto.
Anche il moto è un concetto relativo. Supponiamo di essere su un
treno in prossimità di una stazione ferroviaria. Fuori dal finestrino
vediamo un altro treno e notiamo che si sta muovendo rispetto a
noi. E’ impossibile da questa sola osservazione stabilire quale dei
due treni si sta muovendo rispetto alla stazione.
Ci sono due metodi per descrivere univocamente lo stato di moto di
un punto materiale (una volta scelto un sistema di riferimento):
17
a) si può dare la traiettoria e la funzione spostamento sulla
traiettoria (in questo caso parleremo di descrizione intrinseca del
moto)
b) si può dare il vettore posizionale in funzione del tempo
(definendo una base di versori e quindi le tre componenti rispetto
a questa base in funzione del tempo). Parleremo in particolare di
descrizione vettoriale del moto; parleremo di descrizione
cartesiana quando le tre componenti sono proprio le coordinate
( x(t), y(t), z(t)) .
Si noti che la ricostruzione della traiettoria di un punto materiale (o
del suo vettore posizionale in funzione del tempo) richiede
lʼinterpolazione di una serie di dati: per studiare il moto di un punto
possiamo registrare la sua posizione a certi istanti di tempo (ad
esempio ogni 5 secondi) quindi, al termine della misura, siamo in
grado di esprimere con certezza (a meno di errori di misura) solo
alcuni punti della traiettoria. La nostra ricostruzione del moto
risulterà più completa se saremo in grado di misurare la posizione
del punto ad intervalli di tempo più piccoli fra una misura e lʼaltra.
Descrizione intrinseca del moto
La traiettoria di un punto che si muove è una curva nello spazio.
Per semplicità se ci limitiamo ai moti piani (ovvero al moto di punti
materiali su un piano) allora la traiettoria di questi punti può essere
descritta da unʼequazione del tipo f (x, y) = 0 avendo scelto un
18
opportuno sistema di riferimento cartesiano sul piano (in questo
caso con gli assi x,y sul piano e lʼasse z perpendicolare al piano).
Esempi
Se la traiettoria di un punto è una retta allora lʼequazione è del tipo
ax + by + c = 0 ;
Se la traiettoria è una parabola allora lʼequazione potrebbe essere
del tipo y − ax 2 + bx + c = 0
(questa equazione descrive solo le
parabole con asse di simmetria parallelo allʼasse y);
Se la traiettoria è una circonferenza allora lʼequazione è del tipo
x 2 + y 2 + ax + by + c = 0 ;
10
7,5
P
5
2,5
O
-7,5
-5
-2,5
0
2,5
5
7,5
10
-2,5
19
Se la traiettoria è unʼellisse allora lʼequazione potrebbe essere del
x 2 y2
tipo 2 + 2 − 1 = 0
a b
(questa equazione descrive ellissi con i fuochi
sullʼasse x).
Ovviamente lʼequazione potrebbe essere molto più complessa.
Una volta determinata la traiettoria del moto è necessario definire il
modo in cui il punto materiale si muove su di essa. Per farlo si fissi
su di essa un punto arbitrario “O” ed un verso di percorrenza
(attenzione a non confondere in questo contesto il punto “O”
definito sulla traiettoria e lʼorigine del sistema di riferimento
cartesiano). La posizione di un punto “P” sulla traiettoria sarà
10
P
7,5
5
2,5
O
-7,5
-5
-2,5
0
2,5
5
7,5
10
-2,5
univocamente data da un numero reale che rappresenti lo
spostamento sulla traiettoria “s” ovvero la lunghezza dellʼarco OP
(assumendo s positivo quando P è dalla stessa parte
20
dellʼorientamento scelto sulla traiettoria ed s negativo quando è
dalla parte opposta)
Esempio 1:
Si immagini che un punto materiale abbia una traiettoria rettilinea
y = 3x + 1 . Determinare s sapendo che O è scelto in corrispondenza
dellʼintersezione con lʼasse delle ordinate, la retta è orientata in
verso positivo nella direzione delle ascisse crescenti e sapendo che
P ha coordinate (2,7).
Soluzione: s è +OP essendo OP la distanza fra lʼorigine ed il punto.
Tale distanza si può calcolare con il teorema di Pitagora, essendo
note le coordinate di O e di P, come:
OP = (2 − 0)2 + (7 − 1)2 = 4 + 36 = 2 10 .
Esempio 2
Si determini s per il punto P sulla parabola di equazione y = 2x 2 + 1
essendo O (0,1), P (2,9) ed essendo positivo lʼorientamento nel
verso delle ascisse decrescenti.
Soluzione: s è dato dallʼopposto della misura dellʼarco rettificato
OP (è quindi un numero reale negativo!).
21
Si noti che lo spostamento “s” non dipende semplicemente dalle
posizioni relative di O e di P nello spazio ma dipende anche dalla
traiettoria che li congiunge.
Quando il punto P si muove sulla traiettoria allora lo spostamento s
è una funzione del tempo s(t). Questa funzione calcolata ad un
certo istante rende la posizione s del punto in quellʼistante.
Velocità media e velocità istantanea
Immaginiamo ora di conoscere la posizione s(t1 ) s(t 2 ) del punto agli
istanti t1 e t 2 e la sua traiettoria. Definiamo velocità media del punto
nellʼintervallo di tempo Δt = t 2 − t1 la quantità
vm =
essendo Δs = s(t 2 ) − s(t1 )
Δs
Δt
ovvero la distanza fra le posizioni del
punto agli istanti t1 e t 2 calcolata sulla traiettoria! Un moto si dice
uniforme se la velocità media è la stessa per qualsiasi scelta di t1 e
di t 2 . Se il moto di un punto è uniforme esso copre archi di
circonferenza uguali in tempi uguali.
I moto che si osservano in natura difficilmente sono moti di tipo
uniforme: si parla in questi casi di moto vario. Per questi moti la
velocità media dipende dallʼintervallo di tempo considerato e quindi
è una proprietà poco rilevante. In questi casi è necessario
22
introdurre il concetto di velocità istantanea. La velocità istantanea è
la velocità media calcolata su intervalli di tempo infinitamente
piccoli. Essa è definita solo teoricamente con unʼoperazione di
limite:
v(t) = lim Δt→0
s(t + Δt) − s(t) ds(t)
=
;
Δt
dt
sperimentalmente possiamo pensare che misure della velocità
media fatte con strumenti sempre più precisi e su intervalli di tempo
sempre più piccoli diano risultati molto vicini alla velocità istantanea.
Nel caso di moti uniformi la velocità media e la velocità istantanea
sono uguali.
La velocità (sia essa media o istantanea) è un numero con un
segno positivo o negativo. Il segno positivo ci dice che il punto P si
sta muovendo (mediamente o istantaneamente) in direzione
opposta rispetto allʼorientamento scelto sulla traiettoria.
La velocità è ottenuta dividendo uno spostamento ed un intervallo
di tempo. Se lo spostamento è espresso in metri e lʼintervallo di
tempi in secondi allora la velocità sarà espressa in metri diviso
secondi (m / s) .
Si noti infine che le definizioni di velocità media ed istantanea non
dipendono dalla traiettoria ma solo dallo spostamento espresso in
funzione del tempo. Il valore della velocità non dipende dallʼorigine
O scelta sulla traiettoria poiché la differenza Δs dipende solo dalla
misura dellʼarco percorso, ma il segno della velocità dipende
ovviamente dallʼorientamento scelto sulla traiettoria.
23
Accelerazione media ed istantanea
In maniera analoga a quanto fatto per la velocità media ed
istantanea è possibile definire unʼaccelerazione media ed
unʼaccelerazione istantanea.
Immaginiamo ora di conoscere la velocità istantanea v(t1 ) v(t 2 ) del
punto agli istanti t1 e t 2 . Definiamo accelerazione media del punto
nellʼintervallo di tempo Δt = t 2 − t1 la quantità
am =
essendo Δv = v(t 2 ) − v(t1 )
Δv
Δt
ovvero la differenza fra le velocità
istantanee del punto agli istanti t1 e t 2 .
Lʼaccelerazione istantanea è lʼaccelerazione media calcolata su
intervalli di tempo infinitamente piccoli. Essa è definita solo
teoricamente con la seguente operazione di limite:
a(t) = lim Δt→0
v(t + Δt) − v(t) dv(t)
=
.
Δt
dt
Lʼaccelerazione è ottenuta dividendo una velocità ed un tempo. Se
la velocità è espressa in metri diviso secondi e il tempo in secondi
allora lʼaccelerazione sarà espressa in metri diviso secondi al
quadrato (m / s 2 ) .
24
Esercizi
E1) Unʼauto viaggia alla velocità costante di 108 Km/h; determinare
la velocità in m/s ed il tempo che impiega per percorrere 36 Km. (30
m/s, 20 min)
E2) Due auto viaggiano di moto uniforme lungo due strade rettilinee
formanti, fra di loro, un angolo retto. Sapendo che le due auto
hanno velocità rispettivamente di 10 m/s e 20 m/s e che sono
partite allo stesso istante dallʼincrocio fra le due strade, determinare
la distanza in linea dʼaria dopo 5 minuti. (6708 m)
E3) Un corridore percorre 3 giri di una pista lunga 800 m
impiegando i seguenti tempi: 120 s, 122 s, 123.5 s. Calcolare la
velocità media a ciascun giro e la velocità media sullʼintero
percorso. (6.67 m/s, 6.56 m/s, 6.48 m/s, 6.57 m/s)
E4) Unʼauto viaggia per 200 Km alla velocità media di 50 Km/h ed i
successivi 160 Km alla velocità media di 80 Km/h; calcolare la
velocità media nellʼintero percorso.
E5) Unʼauto entra in autostrada e viaggia con velocità costante di
60 Km/h. Una seconda auto entra in autostrada unʼora dopo la
prima e viaggia con la velocità costante di 80 Km/h. Calcolare a
quale istante dallʼingresso della prima auto in autostrada essa viene
raggiunta dalla seconda auto e quanta strada e stata percorsa dalla
auto a quellʼistante. (4h, 240 Km)
E6) Unʼautomobile viaggia alla velocità di 60 Km/h. Premendo
lʼacceleratore la velocità aumenta con accelerazione costante di 2
25
m/s2 fino a 132 Km/h. Calcolare lʼintervallo di tempo in cui si è avuta
la variazione di velocità. (10 s)
E7) Unʼautomobile si muove alla velocità di 90 Km/h allorché,
improvvisamente, si presenta un ostacolo a 30 m. Il guidatore,
azionando i freni, riesce ad ottenere un moto uniformemente
decelerato con decelerazione uguale a 10 m/s2. Stabilire se lʼauto
investe lʼostacolo. (si)
E8) Un auto alla velocità di 108 Km/h è costretta a fermarsi.
Supponendo che occorrano 0.5 s affinché i riflessi consentano
allʼautista di frenare, calcolare lo spazio percorso dallʼistante in cui il
guidatore è costretto a fermarsi. Si supponga che durante la frenata
il moto sia uniformemente decelerato con decelerazione uguale a
10 m/s2.
Descrizione vettoriale del moto
Come già preannunciato la descrizione del moto tramite il vettore
posizionale è perfettamente equivalente rispetto alla descrizione
intrinseca. Il vettore posizionale di un punto in movimento varia nel
tempo (può variare in modulo, direzione e verso).
Se r (t1 ), r (t 2 ) sono i vettori posizionali del punto agli istanti t1 e t 2
allora possiamo definire la velocità vettoriale media del punto
nellʼintervallo Δt = t 2 − t1 come
Δr
vm =
Δt
26
essendo Δr = r (t 2 ) − r (t1 ) ovvero il vettore spostamento fra i punti
r (t1 ), r (t 2 ) . Con unʼoperazione di limite è poi possibile definire la
velocità vettoriale istantanea come
r (t + Δt) − r (t) dr (t)
v(t) = lim
=
.
Δt→0
Δt
dt
Le unità di misura di velocità vettoriali e delle velocità definite nei
paragrafi precedenti sono le stesse. Si noti inoltre che:
1) per moti non rettilinei Δr ≠ Δs e perciò per questi moti vm ≠ vm .
Questo succede perché Δs rappresenta la lunghezza di un arco
mentre Δr rappresenta la lunghezza della corda sottesa dallo
stesso arco;
2) Quando ragioniamo su tempi infinitamente piccoli e quindi
spostamenti infinitesimi lʼarco e la corda sottesa diventano
indistinguibili quindi vale sempre che v(t) = v(t) ;
3) La direzione della velocità vettoriale istantanea del punto è
tangenziale alla sua traiettoria. Vale la relazione v(t) = v(t) tˆt
essendo tt un versore tangenziale alla traiettoria in
corrispondenza del punto r (t) .
Se v(t1 ), v(t 2 ) sono le velocità vettoriali istantanee del punto agli
istanti t1
e t2
allora possiamo definire lʼaccelerazione vettoriale
media del punto nellʼintervallo Δt = t 2 − t1 come
27
Δv
am =
Δt
essendo Δv = v(t 2 ) − v(t1 )
il vettore differenza fra le velocità
v(t1 ), v(t 2 ) . Con unʼoperazione di limite è poi possibile definire
lʼaccelerazione vettoriale istantanea come
v(t + Δt) − v(t) dv(t)
a(t) = lim
=
.
Δt→0
Δt
dt
Le unità di misura delle accelerazione vettoriali e delle accelerazioni
definite nei paragrafi precedenti sono le stesse. Si noti inoltre che:
4) per moti non rettilinei Δv ≠ Δv e perciò per questi moti am ≠ am .
Questo succede perché Δv rappresenta la differenza dei moduli
del vettore velocità (per quanto osservato nel punto 2) mentre
Δv rappresenta il modulo della differenza dei vettori velocità;
siccome i vettori si sommano e sottraggono secondo la regola
del parallelogramma queste quantità sono diverse a meno che il
moto non sia rettilineo.
5) Solo per moti rettilinei vale che a(t) = a(t) ;
6) In generale lʼaccelerazione vettoriale istantanea ad un certo
istante t si può scrivere come la somma di due contributi come
dv(t) ˆ v(t)2
a(t) =
tt +
n̂t
dt
Rt
essendo tt un versore tangenziale alla
traiettoria in corrispondenza del punto r (t) , nt
è un versore
28
ortogonale a tt
ed Rt è il raggio di curvatura della traiettoria in
corrispondenza del punto r (t) .
La traiettoria e la velocità di un punto permettono di classificare
diversi tipi di moto.
Il moto rettilineo è quello di un punto materiale che si muove su una
retta. Il moto rettilineo uniforme è il moto con velocità costante, il
moto rettilineo uniformemente accelerato è il moto di un punto con
accelerazione costante.
Il moto circolare è quello di un punto che si muove su una
circonferenza. Il moto circolare uniforme è il moto con velocità
costante.
Moto Uniforme
Per definizione in un moto uniforme la velocità istantanea è la
stessa lungo tutta la traiettoria ed è uguale alla velocità media.
Vale quindi:
v(t) = vm =
Δs
,
Δt
Se rappresentiamo graficamente la velocità istantanea in
funzione del tempo osserveremo semplicemente una retta
costante parallela all’asse delle ascisse. Lo spostamento
Δs = s(t1 ) − s(t 2 ) corrispondente ad un intervallo di tempo
29
Δt = t 2 − t1 è dato da Δs = vm Δt
ed è uguale all’area sottesa al
grafico della velocità fra gli istanti t1
e t2
(si assuma per
convenzione l’area positiva quando giace nel semipiano delle
v(t)
vm
t1
ordinate positive e
t2
l’area
t
negativa
quando giace nel semipiano delle ordinate negative).
In generale l’area sottesa dal grafico della velocità in funzione
del tempo è legata allo spazio percorso. L’accelerazione media
e l’accelerazione istantanea in un moto uniforme sono uguali a
zero.
Moto uniformemente accelerato (decelerato)
Per definizione il moto uniformemente accelerato è il moto di un
punto con accelerazione media ed istantanea uguali e costanti.
30
In generale la variazione di velocità fra due istanti di tempo è
data da Δv = v(t 2 ) − v(t1 ) = am Δt = am (t 2 − t1 ) . Se rappresentiamo
graficamente l’accelerazione in funzione del tempo
osserveremo semplicemente una retta costante parallela
all’asse delle ascisse e Δv è dato dall’area sottesa dalla retta fra
i punti t1 e t 2 (con la convenzione del segno usata nell’esercizio
precedente). Dall’espressione appena ottenuta osserviamo che
sostituendo t 2 → t
si ricava l’espressione della velocità
istantanea ad un generico istante di tempo:
v(t) = v(t1 ) + am ( t − t1 ) .
Si noti che la velocità istantanea dipende dalla velocità ad un
istante arbitrariamente scelto (in questo caso t1 ).
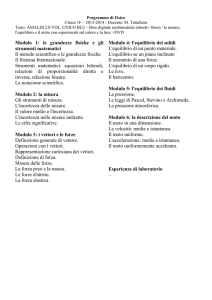
Vediamo ora come sia possibile determinare lo spostamento.
Per determinarlo possiamo procedere per via grafica:
rappresentiamo la velocità istantanea in funzione del tempo e
determiniamo l’area sottesa dal grafico. L’espressione della
velocità istantanea in funzione del tempo è l’equazione di una
retta con coefficiente angolare am
(si pensi alla sostituzione
y → v(t), x → t ).
31
v(t)
v(t2)
v(t1)
t1
t2
t
E’ evidente dal grafico della velocità che l’area sottesa dalla
retta è data dalla somma del lato del rettangolo di altezza v(t1 ) e
di base Δt = t 2 − t1 con l’area del triangolo rettangolo di cateti
Δv = v(t 2 ) − v(t1 ) = am Δt e Δt . Ricapitolando
Δs = v(t1 )Δt +
1
1
ΔvΔt = v(t1 )Δt + am Δt 2 .
2
2
Ricordando la definizione di Δs = s(t 2 ) − s(t1 ) e sostituendo a t 2
un generico t
si ottiene l’espressione dello spostamento in
funzione del tempo per un moto uniformemente accelerato:
s(t) =
1
2
am ( t − t1 ) + v(t1 ) ( t − t1 ) + s(t1 )
2
32