Raggiungibilità e
retroazione dello stato
Controllo Digitale - A. Bemporad - A.a. 2007/08
Richiami di Algebra Lineare
Sir William Rowan
Hamilton
(1805-1865)
Arthur Cayley
(1821-1895)
Controllo Digitale - A. Bemporad - A.a. 2007/08
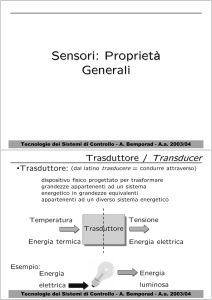
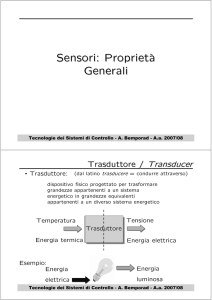
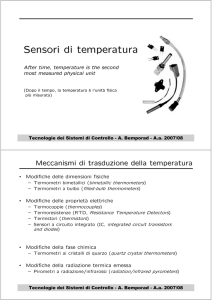
Raggiungibilità: motivazione
v(k)
u(k)
A,B
K
x(k)
C
y(k)
Controllo con
retroazione
dello stato
Controllo Digitale - A. Bemporad - A.a. 2007/08
Raggiungibilità
Soluzione:
Definizione
Controllo Digitale - A. Bemporad - A.a. 2007/08
Raggiungibilità
Controllo Digitale - A. Bemporad - A.a. 2007/08
Raggiungibilità
TEOREMA
Controllo Digitale - A. Bemporad - A.a. 2007/08
Raggiungibilità
Osservazioni
Controllo Digitale - A. Bemporad - A.a. 2007/08
Controllo a minima energia
Controllo Digitale - A. Bemporad - A.a. 2007/08
Controllo a minima energia
Controllo Digitale - A. Bemporad - A.a. 2007/08
Richiami di Algebra Lineare
Cambi di coordinate
Base di
:
Base canonica di
linearmente indipendenti
:
coordinate rispetto alla nuova base
coordinate rispetto
alla base canonica
matrice di cambio di coordinate
Controllo Digitale - A. Bemporad - A.a. 2007/08
Cambio di coordinate nello spazio di stato
Controllo Digitale - A. Bemporad - A.a. 2007/08
Decomposizione canonica di raggiungibilità
Controllo Digitale - A. Bemporad - A.a. 2007/08
Decomposizione canonica di raggiungibilità
Controllo Digitale - A. Bemporad - A.a. 2007/08
Raggiungibilità e funzione di trasferimento
Gli autovalori della parte non raggiungibile del sistema
non compaiono come poli della sua funzione di trasferimento
Controllo Digitale - A. Bemporad - A.a. 2007/08
Controllabilità
Definizione
Controllo Digitale - A. Bemporad - A.a. 2007/08
Controllabilità
Controllo Digitale - A. Bemporad - A.a. 2007/08
Controllabilità
Definizione:
Teorema:
Un sistema controllabile in n passi
si dice (completamente) controllabile
Un sistema è controllabile se e solo se tutti gli
autovalori della sua parte non raggiungibile sono nulli
Dimostrazione:
Controllo Digitale - A. Bemporad - A.a. 2007/08
Controllabilità
Controllo Digitale - A. Bemporad - A.a. 2007/08
Stabilizzabilità
Definizione:
Un sistema si dice stabilizzabile se la sua parte
non raggiungibile è asintoticamente stabile
Un sistema è stabilizzabile se e solo se tutti
gli autovalori della sua parte non raggiungibile sono
in modulo < 1 / a parte reale negativa.
Controllo Digitale - A. Bemporad - A.a. 2007/08