DISPENSE di FISICA per la classe 1GTG dell’ Istituto Europa
Prof. Giuseppe Tufano
A.S. 2015/16
La fisica è la scienza che studia i fenomeni naturali al fine di descriverli misurandone le proprietà.
L’ indagine scientifica aiuta a guardare meglio intorno a sé, a non dare niente per scontato, a
conoscere di più il mondo in cui viviamo, a partire da ogni singolo particolare.
La fisica si avvale di un metodo di indagine detto metodo sperimentale inventato da Gallileo
Gallilei.
Le fasi su cui si basa tale metodo sono:
-
OSSERVAZIONE dei fenomeni.
-
FORULAZIONE delle IPOTESI, che legano le grandezze osservate attraverso relazioni
matematiche.
-
VERIFICA SPERIMENTALE che serva a confermare le ipotesi e formulare la legge.
Nel caso in cui le ipotesi non trovano conferma dall’ esperienza bisogna formulare nuove
ipotesi.
Le proprietà misurabili dei corpi, cioè che possono essere sottoposte all’ operazione di misura,
sono dette grandezze fisiche. L unità di misura è una quantità della stessa specie di quella in
esame, il cui valore viene stabilito pari a 1. Pertanto, misurare una grandezza fisica significa
stabilire quante volte la quantità in esame contiene l’unità di misura. L’insieme delle operazioni
tramite le quali viene eseguito il confronto tra le quantità da misurare e l’unità di misura viene
denominato misurazione. Il rapporto numerico tra la grandezza misurata e l’unità di misura è
detto misura della grandezza. Il processo di definizione delle unità di misura si è concluso negli
ultimi decenni con l’istituzione del Sistema Internazionale di Unità di Misura (SI), che definisce una
unità di misura per ogni tipo di grandezza fisica.
1
Il Sistema Internazionale è costituito da 7 unità fondamentali.
-
La lunghezza, che si misura con il metro (simbolo m)
-
La massa, che si misura con il kilogrammo (simbolo kg)
-
Il tempo, che si misura con il secondo (simbolo s)
-
La temperatura, che si misura in gradi centigradi o gradi Kelvin (simbolo °C , K)
-
L’ intensità di corrente, che si misura in Ampere (simbolo A)
-
L’intensità luminosa, che si misura in candele (simbolo cd)
-
La quantità di sostanza, che si misura in mole
Una misurazione viene effettuata con il metodo diretto quando la grandezza da misurare viene
messa a confronto diretto con la sua unità di misura (unità campione di riferimento). Le misure
indirette delle grandezze fisiche, invece, sono quelle che vengono effettuate mediante calcoli
matematici.
La portata di uno strumento di misura
è uguale al massimo valore apprezzabile
(misurabile) dallo strumento stesso.
La sensibilità è la minima quantità apprezzabile dallo strumento.
Ad esempio la portata di un righello è la massima quantità misurabile dal righello. La
sensibilità è la minima quantità misurabile dal righello (distanza tra due tacche consecutive
in cui è stato suddiviso il righello). Portata e sensibilità sono inversamente proporzionali.
Non sempre le misure indirette richiedono l’esecuzione di calcoli: alcuni dispositivi di misura sono
progettati in modo tale da evitare questa fatica a chi li utilizza. Per esempio, il contachilometri di
un’ automobile misura le distanze percorse dalla vettura contando il numero di giri compiuti dalle
ruote e moltiplicandolo per la loro circonferenza. Così, le misure indirette sono facilitate; pertanto
le distanze percorse non devono essere calcolate, ma soltanto lette sullo strumento, che fornisce il
risultato già in kilometri, sull’ apposito quadrante dove si trova anche il misuratore di velocità, il
tachimetro.
2
Gli strumenti come il contachilometri, che sono predisposti pet eseguire automaticamente le
misure indirette, sono detti strumenti tarati.
Notazione esponenziale e ordine di grandezza
In Fisica si possono incontrare grandezze espresse da numeri molto grandi (per esempio le
distanze tra i pianeti o le stelle) o da numeri molto piccoli (per esempio, le distanze tra particelle
elementari in un nucleo atomico) e spesso risulta scomodo scrivere il numero per intero. A questo
scopo si ricorre alla notazione esponenziale che utilizza le potenze del numero dieci (potenze di
10) sostituendoli agli zeri del numero elevato o ai decimali del numero piccolo. Per esempio,
scrivere 3000000 è equivalente a scrivere 3*106, e quest’ ultima permette di risparmiare spazio e
calcoli.
Analogamente, per scrivere 0.0005 si può scrivere 5*10-4 . Inoltre, a volte non si è interessati al
risultato esatto di un operazione, ma solo a una sua stima, per avere un’idea delle dimensioni
coinvolte nel fenomeno che si sta studiando. In questo caso si ricorre all’ordine di grandezza del
numero, che rappresenta la potenza di 10 più vicina al valore considerato. Per esempio, si dirà che
la massa del Sole è di 1033 g.
ERRORI NELLE MISURAZIONI
La misurazione di una grandezza fisica comporta sempre un’ errore, qualunque sia la sensibilità
dello strumento utilizzato o dal metodo di misurazione adottato. Gli errori che si possono
commettere nell’ eseguire una misura sono di due tipi, gli errori sistematici e gli errori casuali.
Gli errori sistematici sono dovuti a difetti strumentali (difetti di taratura) o a imperfezione
nel metodo di misura utilizzato. Essi sono solitamente i più semplici da eliminare, perché
hanno un origine precisa che, una volta individuata, permette di eliminare o ridurre gli
errori stessi.
3
Un errore sistematico avviene sempre nello stesso senso, cioè sempre per difetto o per
eccesso : il valore trovato sarà sempre maggiore del valore vero oppure minore. Se, per
esempio, un cronometro va avanti o rimane indietro, commetteremo sempre un errore
sistematico, che potrà essere eliminato conoscendo l’intervallo di tempo che lo produce.
Gli errori casuali, invece, dipendono da cause non esattamente individuabili e non ben
definite, variano in modo imprevedibile e possono agire per eccesso o per difetto sulla
misura.
Essi sono causati da distrazione, da sbagli di lettura, o da un’ errata trascrizione delle
misure effettuate. Possono essere generati anche da improvvisi sbalzi termici che posso
compromettere o alterare la funzionalità dello strumento. Nella misura del tempo
impiegato da un oggetto nel compiere una distanza, per esempio, è molto difficile far
coincidere l’ istante della partenza dell’oggetto con l’stante in cui parte il cronometro, e la
stessa cosa accadrà al momento dell’arrivo.
La ripetizione dell’esperimento darà quindi origine di volta in volta a valori leggermente
diversi.
TEORIA DEGLI ERRORI
Misurare una grandezza fisica implica dunque la possibilità di commettere un’ errore. Per
questo motivo, dovendo conoscere il valore della misura di una grandezza, anziché
ricercare il valore esatto si ricorre al suo valore più attendibile, quello cioè che ha maggiore
probabilità di verificarsi.
Ogni misura, per essere sufficientemente accurata, deve essere esegyuita più volte ; nella
ripetizione della misura si ottengono risultati leggermente differenti (data l’elevata
sensibilità dello strumento utilizzato) ; il valore della misura che più si avvicina al valore
4
reale sarà dato dal suo valore medio, indicato con 𝑋 e dato dalla somma dei valori ottenuti
in n esperimenti diviso il numero degli esperimenti:
𝑋=
𝑥1+ 𝑥2 + ⋯ + 𝑥𝑛
𝑛
Il risultato della misura va poi dato facendolo seguire dall’errore che lo accompagna, in
modo da determinare l’intervallo di incertezza della misura stessa. Nel caso di un numero
limitato di misurazioni il modo più semplice per determinare l’errore è dato dal calcolo
dell’errore massimo o errore assoluto detto anche semidispersione, indicato con ɛ e dato
dalla differenza tra il valore massimo e quello minimo ottenuto, divisa per 2:
∈=
𝑣𝑎𝑙𝑜𝑟𝑒𝑚𝑎𝑥 −𝑣𝑎𝑙𝑜𝑟𝑒𝑚𝑖𝑛
2
Il risultato della misura in questo caso è dato dalla combinazione tra il valore medio e
l’errore assoluto, ovvero:
valore cercato = 𝑋±∈
Se si vuole conoscere il grado di precisione con cui è stata effettuata la misura si fa ricorso
all’errore relativo, che rappresenta l’incidenza dell’ errore massimo in rapporto al valore
∈
medio: si definisce pertanto errore relativo ∈𝑟 = 𝑋 , espresso in genere in termini
percentuali.
La misura avente errore relativo minore è la più precisa.
CIFRE SIGNIFICATIVE
Quando si scrive il risultato di una misura diretta, in genere si forniscono anche informazioni sul
grado di incertezza con cui essa è stata effettuata. Per esempio se scriviamo:
L = (20,8±0,1) cm
Intendiamo che il valore della lunghezza è compreso fra 20.7 e 20,9, cioè la terza cifra è incerta.
Se invece scriviamo:
L = (20,80±0,01)cm
5
Il valore della lunghezza è compreso tra 20,79 e 20,81; la quarta cifra è incerta.
Si chiamano cifre significative di una misura le cifre certe e la prima incerta.
Qual’ è la differenza tra 20,8cm e 20,80cm? Dal punto di vista matematico i numeri hanno lo
stesso valore. Dal punto di vista fisico 20,8cm è scritto con tre cifre significative, mentre 20,80 è
scritto con quattro cifre significative. Il numero di cifre significative si trova contando la cifra
incerta e le cifre incerte alla sua sinistra fino all’ultima diversa da zero. Nella tabella sono riportati
alcuni esempi.
Numero
12,45
47,3
0,34
0,340
23,073
Cifre significative
4
3
2 (non si conta lo zero iniziale)
3 (si conta lo zero finale)
5
La rappresentazione dei dati
I dati raccolti si possono rappresentare attraverso grafici, tabelle e funzioni matematiche.
Sono praticamente infiniti i modi in cui due grandezze possono essere in relazione tra loro. Nei casi
più semplici, le relazioni possono venire espresse in forma matematica; ciò significa che il valore di
una grandezza può essere ottenuto con un calcolo, se si conosce il valore della grandezza da cui
dipende.
Si dice che due grandezze X e Y sono direttamente proporzionali se all’ aumentare (diminuire) dell’
𝑦
una aumenta (diminuisce) anche l’altra. Ciò si traduce in termini matematici scrivendo: 𝑥 = 𝐾 cioè
il rapprto delle grandezze deve essere costante.
La seguente tabella mostra i valori della massa m di alcuni blocchetti di ferro al variare del
volume V.
Massa (g)
Volume
(cm3)
7,8
1,0
15,6
2,0
23,4
3,0
31,2
4,0
39,0
5,0
47,8
6,0
Il rapporto tra massa e volume è la densità :
6
7,8 15,6 23,4 31,2 39,0 47,8
=
=
=
=
=
= 7,8 𝑔/𝑐𝑚3
1,0
2,0
3,0
4,0
5,0
6,0
Si ottiene così un valore costante. Si dice quindi che fra la massa (m) e il volume (V) c’è una
diretta proporzionalità.
Riportando i dati in un piano cartesiano si ha :
50
40
30
m(g)
20
Series1
10
0
1
2
3
4
5
6
V(cm3)
Un altro tipo di relazione matematica tra due grandezze fisiche è la proporzionalità inversa.
Due grandezze X e Y sono inversamente proporzionali se all’ aumentare (diminuire) dell’ una
diminuisce (aumenta) l’altra. Matematicamente significa che il loro prodotto è costante X*Y = K.
Se ad esempio si versa in un contenitore cilindrico dell’acqua si nota che all’ aumentare dell’area
di base del cilindro diminuisce l’altezza del livello del liquido ma il volume rimane costante.
Altezza liquido h (cm)
50
25
10
5
2
Area di base (cm2)
1
2
5
10
25
7
Con i dati in tabella possiamo costruire un grafico riportando sull’ asse X delle ascisse l’altezza dell’
acqua h e sull’asse Y delle ordinate l’area di base Ab, si ottiene cosi la curva indicata in figura che
prende il nome di ramo di iperbole equilatera.
60
50
40
A(cm^2) 30
Series1
20
10
0
0
10
20
30
40
50
60
h(cm)
GRANDEZZE SCALARI E GRANDEZZE VETTORIALI
In fisica si fa una distinzione tra grandezze fisiche scalari e grandezze fisiche vettoriali.
Le grandezze scalari sono espresse da un numero e dalla corrispondente unità di misura (ad
esempio, la lunghezza di un’ asta è 7m, la temperatura di un corpo e 37 °C, la massa di un corpo è
3 kg, l’intensità di corrente che circola in un conduttore è 3 A). Il numero che definisce la misura
dello scalare è detto modulo o più frequentemente intensità.
Le grandezze vettoriali sono quelle che per essere definite c’è bisogno non solo di esprimere il
modulo, ma anche una direzione, un verso un punto di applicazione. Le grandezze vettoriali sono
rappresentate per mezzo di figure geometriche (segmenti orientati simboleggiati da frecce). Sono
esempio di grandezze vettoriali la forza, la velocità, l’accelerazione, il campo elettrico, il campo
magnetico. Un vettore, secondo la notazione vettoriale, viene indicato con una lettera a cui è
⃗⃗⃗⃗, 𝑎⃗).
sovrapposta una freccia (per esempio 𝐹⃗ , 𝑉
8
Rappresentazione grafica di un vettore
modulo
verso
⃗⃗
𝑭
direzione
Punto di applicazione (origine)
Mentre per le grandezze scalari non esistono problemi nell’effettuare le operazioni fondamentali,
per le grandezze vettoriali per effettuare la somma o differenza tra due vettori si seguano i
seguenti metodi:
Caso di 2 vettori 𝑎⃗ , 𝑏⃗⃗ aventi stessa direzione(o parallela) e stesso verso.
Il vettore somma 𝑅⃗⃗ o risultante (vettoriale) è il vettore che ha per direzione e verso
quello dei vettori addendi e per modulo la somma dei moduli dei vettori addendi.
⃗⃗
𝒂
⃗⃗
𝒃
⃗⃗
⃗⃗⃗ = 𝒂
⃗⃗ + 𝒃
𝑹
9
Caso di 2 vettori 𝑎⃗ 𝑒 𝑏⃗⃗ aventi stessa direzione ma verso opposto.
Il vettore risultante 𝑅⃗⃗ è un vettore avente la stessa direzione dei vettori addendi,
per modulo la differenza dei moduli dei 2 vettori addendi e per verso quello del
vettore maggiore.
⃗⃗
𝒂
⃗𝒃⃗
⃗⃗⃗ = 𝒂
⃗⃗ + ⃗𝒃⃗
𝑹
Metodo punta - coda
Se invece dobbiamo rappresentare il vettore risultante di 2 vettori 𝑎⃗ 𝑒 𝑏⃗⃗ che
hanno direzioni diverse, dobbiamo traslare il vettore 𝑏⃗⃗ parallelamente a se stesso in
modo che la sua coda coincida con la punta di 𝑎⃗ e si congiunge la coda di 𝑎⃗ con la
punta di 𝑏⃗⃗ : si ottiene così la risultante 𝑅⃗⃗ .
⃗⃗
𝒂
⃗𝒃⃗
⟹
⃗⃗
𝒂
⃗𝒃⃗
⃗𝑹
⃗⃗ = 𝒂
⃗⃗ + ⃗𝒃⃗
10
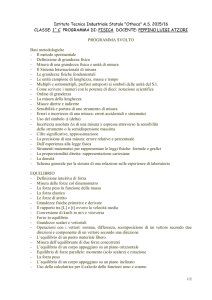
Un altro modo per disegnare la risultante è la regola del parallelogramma.
Dati 2 vettori 𝑎⃗ e 𝑏⃗⃗ aventi direzioni diverse, si fa traslare parallelamente a stesso il vettore 𝑏⃗⃗ in
modo che la sua coda coincida con quella di 𝑎⃗ (i 2 vettori devono avere la stessa origine). Si
disegna la retta parallela al vettore 𝑎⃗ e passante per la punta di 𝑏⃗⃗ e la parallela al vettore 𝑏⃗⃗
passante per la punta di 𝑎⃗. Queste due rette si intersecano in un punto formando un
parallelogramma. La diagonale di tale figura e che esce dall’origine comune dei due vettori è il
vettore somme o risultante 𝑅⃗⃗ .
𝑎⃗
𝑎⃗
𝑅⃗⃗ = 𝑎⃗ + 𝑏⃗⃗
𝑏⃗⃗
𝑏⃗⃗
⟹
Il caso della differenza tra due vettori 𝑎⃗ e 𝑏⃗⃗ viene facilmente riportato al caso della somma,
componendo 𝑎⃗ con il vettore opposto di 𝑏⃗⃗ :
𝑎⃗ − 𝑏⃗⃗ = 𝑎⃗ + (−𝑏⃗⃗).
𝑎⃗
𝑅⃗⃗ = 𝑎⃗ − 𝑏⃗⃗
⟹
𝑏⃗⃗
- 𝑏⃗⃗
𝑎⃗
11
LE FORZE
La forza è ciò che causa una modificazione della quiete o del moto di un corpo.
Le forze possono agire a distanza o per contatto.
Nel primo caso ad esempio le massa, le cariche, i magneti creano dei campi di forza che possono
generare forze di attrazione e repulsione. Nel secondo caso la forze sono generate da un
interazione diretta con il corpo, ad esempio la forza elastica oppure la forza d’attrito che nasce in
seguito al movimento di una superficie su un altra.
LA FORZA PESO
Il peso (simbolo 𝑃⃗⃗) si un corpo, detto anche forza di gravità, è la forza con cui il corpo è attirato
dalla Terra. Essendo una forza, il peso è una grandezza vettoriale dotata di direzione e verso. Il
peso è diretto lungo la retta che congiunge i corpo al centro della Terra, retta che è chiamata
verticale. Quindi un corpo lasciato libero di care si muove lingo la verticale verso il centro della
Terra. Mentre la massa di un corpo ha su qualsiasi altro pianeta lo stesso valore che ha sulla Terra,
il suo peso subisce da un luogo all’altro notevoli variazioni.
Conoscendo la massa di un corpo è possibile calcolare il suo peso.
Sperimentalmente si è dimostrato che il peso di un coepo è direttamente proporzionale alla sua
massa cioè un corpo di massa doppia subisce un’attrazione da parte della Terra con forza di
gravità doppia secondo una costante di proporzionalità chiamata accelerazione di gravità g che
𝑁
sulla Terra vale 9,81 𝑘𝑔. Allora avremo la relazione
P = m*g
L’unità di misura delle forze nel SI è il Newton (N).
12
Il valore dell’accelerazione di gravità diminuisce con l’aumentare dell’ altitudine e assume valori
𝑚
𝑚
diversi a seconda che ci troviamo sulla Luna (1,63𝑠2 ) o su Marte (3,69𝑠2 ).
9,81 N
m = 1 kg
𝑚
Sulla Terra g = 9,81 𝑠2
1,63 N
m = 1 kg
𝑚
Sulla Luna g = 1,63 𝑠2
LA FORZA ELASTICA
I corpi vengono classificati in corpi elastici, plastici, rigidi e fragili a seconda di come e quanto
modificano la loro forma se sono sottoposti a una forza.
Sono detti elastici i corpi che deformati dall’azione di una forza, tornano alla forma
originale quando cessa l’azione della forza. Un elastico, una molla, una plallina di
gomma sono corpi elastici.
Sono detti plastici i corpi che si deformano permanentemente quando sono
soggetti all’azione di una forza, rimanendo deformati anche quando cessa la forza
agente. La plastilina, lo stucco ,l’argilla sono materiali plastici.
Sono detti rigidi i corpi che mantengono sempre la loro forma, qualunque sia la
forza applicata ad essi. Un mattone, un sasso, una sbarra di ferro sono corpi rigidi.
Sono detti corpi fragili quei corpi in cui quando la forza applicata supera un
determinato carico di rottura si rompono integralmente (n0n presentano
13
deformazioni permanenti ma si spezzano). Ad esempio il vetro è un esempio di
materiale fragile.
I corpi più plastici sono i liquidi, mentre i corpi rigidi sono rappresentati dai solidi. Comunque,
nessun solido è perfettamente rigido; anche quelli più resistenti possono deformarsi, se sottoposti
a una forza sufficientemente intensa. Non esistono nemmeno corpi perfettamente elastici; infatti,
oltre un determinato limite della forza agente, tutti i corpi subiscono deformazioni permanenti o si
rompono.
CORPI ELASTICI
Consideriamo più attentamente i corpi elastici. Quando una molla viene compressa o allungata,
essa reagisce con una forza contraria che tende a riportala nelle condizioni iniziali. L’elasticità è la
capacità di un corpo di reagire a una forza esterna deformante mediante una forza di richiamo,
denominata forza elastica. Quest’ultima si oppone alla forxa esterna, ed è in grado di annullare la
deformazione non appena viene meno l’azione della forza esterna.
Se prendiamo una molla e la fissiamo verticalmente ad un sostegno, possiamo deformala
agganciando alla sua estremità inferiore della masse m. Se alla massa agganciata alla molla ne
aggiungiamo un’alta uguale, otterremo un allungamento della molla doppio del precedente.
L0
L
ΔL
2ΔL
m
2m
14
Indichiamo con L0 la lunghezza iniziale della molla a riposo, con L la lungezza finale (dopo l’aggiunta
della massa). Definiamo ΔL L’allungamento subito dalla molla tra la lungezza finale L e quella
iniziale L0. Allora, si ha: ∆𝐿 = 𝐿 − 𝐿0
Aggiungiamo alla molla altre masse uguali si nota che per una massa doppia si ha un’
allungamento doppio, per una massa tripla si ha un’ allungamento triplo. Quindi:
𝑃
∆𝐿
= 𝑐𝑜𝑠𝑡 = 𝐾.
P e ΔL sono, allora direttamente proporzionali. La costante di proporzionalità K, è detta costante
elastica della molla: dipende dal materiale di cui è costituita la molla, dal suo spessore e dal
numero di avvolgimenti (o spire). Posiamo, allora, scrivere, P = K*ΔL.
Tale relazione è nota come legge di Hooke (o legge di elasticità).
Tale legge afferma che
l’allungamento subito da una molla è direttamente proporzionale all’intensità della forza che lo ha
provocato. Riportando sull’asse delle ascisse gli allungamenti della molla e sull’asse delle ordinate i
valori dei pesi dovute alle masse agganciate, si ottiene una semiretta uscente dall’origine.
Ad esempio, possiamo avere:
Allungamento ΔL (m)
2
4
8
16
Peso (N)
3
6
12
24
30
25
20
P (N) 15
Series1
10
5
0
0
5
10
Allungamenti ΔL
15
20
15
La legge di Hooke si può esprimere anche in forma vettoriale: l’allungamento ΔL corrisponde a uno
spostamento 𝑥⃗ del suo estremo libero e la sua direzione coincide con quella della forza peso 𝑃⃗⃗.
Quindi, avremo:
𝑃⃗⃗ = 𝐾𝑥⃗
La forza 𝑃⃗⃗ applicata produce una deformazione della molla che viene contrastata da un’altra forza,
detta forza elastica ⃗⃗⃗⃗
𝐹𝑒 : questa si manifesta nella tendenza del materiale a riprendere la sua forma
originale. La forza elastica ⃗⃗⃗⃗
𝐹𝑒 agisce con orientazione opposta alla forza peso 𝑃⃗⃗, quindi possiamo
scrivere: ⃗⃗⃗⃗
𝐹𝑒 = −𝐾𝑥⃗
In cui il segno meno indica che la forza elastica ⃗⃗⃗⃗
𝐹𝑒 ha verso opposto allo spostamento 𝑥⃗.
STATICA
La statica studia l’equilibrio dei corpi. I suoi campi di applicazione sono numerosi: dalla stabilità di
edifici, stabilità dei ponti, statica applicata ai fluidi nella costruzione di dighe, in ingegneria civile.
Essa definisce le condizioni necessarie affinchè un corpo, sul quale agisce un sistema di forze,
rimanga in equilibrio.
Equilibrio alla traslazione. Un corpo è in equilibrio rispetto alla traslazione quando la
somma vettoriale (risultante)delle forze applicate su di esso è nulla:
∑ 𝐹⃗ = 0
Momento di una forza rispetto ad un punto
Il momento genera le rotazioni.
Il momento di una forza rispetto ad un punto di un corpo è dato in modulo dal prodotto
dell’intensità della forza per la distanza di tale punto dalla retta di applicazione della forza.
M = F*b
si misura in N*m
16
⃗⃗⃗
𝑀
𝐹⃗
Il vettore momento è ortogonale
P
al piano su cui giacciono 𝐹⃗ 𝑒 𝑏.
b
Il suo verso si trova con la regola della mano destra.
Si definisce coppia di forze l’insieme di due forze aventi stesso modulo, direzione parallela
ma verso opposto. La distanza tra le rette di applicazione è detta braccio della coppia.
La coppia genera rotazioni ma non traslazioni in quanto ha risultante nulla.
Momento di una coppia
Il momento di una coppia è dato dal prodotto del modulo della forza per la distanza tra le
rispettive rette di applicazione. Esso è in indice della capacità delle forze di generare una
rotazione del corpo su se stesso.
⃗⃗⃗
𝑀
𝐹⃗1
b
𝐹⃗2
Equilibrio alla rotazione
Un corpo è in equilibrio rispetto alla rotazione se la somma vettoriale (risultante) dei
momenti è uguale a zero:
⃗⃗⃗ = 0
∑𝑀
17
Queste due relazioni costituiscono le equazioni cardinali della statica e rappresentano le
condizioni necessarie e sufficienti affinchè un corpo sia in equilibrio rispetto ai due possibili
movimenti cioè traslazione e rotazione.
Equilibrio di un corpo si piano inclinato
Consideriamo un corpo appoggiato su un piano inclinato liscio di lunghezza L e altezza h.
𝐹𝑉
C
𝐹𝑒𝑞
𝑃∥
𝑃⊥
A
P
B
AC = h ; BC = L
La forza peso P agente sul corpo si scompone in due componenti, una parallela e una perpendicolare al
piano. La componente perpendicolare viene annullata dalla reazione vincolare. Da semplici considerazioni
geometriche risulta che la forza equilibrante uguale ed opposta alla componente parallela della forza peso
è data da:
ℎ
𝐹𝑒𝑞 = 𝑃 𝐿
SI definisce BARICENTRO G di un corpo il punto materiale in cui è applicata la forza peso, quindi la somma
vettoriale di tutte le forze peso applicate alle masse discrete in cui può essere suddiviso il nostro corpo
rispetto a G è nulla.
Si dice che un corpo è in equilibrio stabile quando allontanandolo dalla posizione di equilibrio esso vi
ritorna spontaneamente. Si parla di equilibrio instabile quando il corpo allontanato dalla posizione di
equilibrio non ritorna più in tale posizione. Si dice invece che un corpo è in equilibrio indifferente quando
ogni posizione è di equilibrio.
18
Equilibrio di corpi appoggiati: Un corpo appoggiato è in equilibrio quando la verticale passante per il
baricentro cade nella base di appoggio.
Equilibrio di corpi sospesi o vincolato ad punto fisso: Un corpo è in equilibrio quando la verticale per il punto
di sospensione passa per il baricentro.
Macchine semplici
Una macchina è un dispositivo con il quale è possibile vincere una resistenza. La forza motrice 𝐹𝑚 e quella
che compie l’azione, la forza resistente 𝐹𝑟 è quella da vincere.
Vantaggio statico di una macchina
𝑉=
Se V > 1 la macchina è vantaggiosa.
Se V < 1 la macchina è svantaggiosa.
Se V = 1 la macchina è indifferente.
𝐹𝑟
𝐹𝑚
Un esempio di macchine semplici sono le leve.
Condizione di equilibrio per le leve:
𝐹𝑚 ∙ 𝑏𝑚 = 𝐹𝑟 ∙ 𝑏𝑟
19
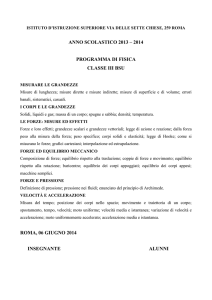
Prima specie
bm
br
Fm
Fr
Fulcro tra forza motrice e forza resistente.
E’ vantaggiosa se 𝑏𝑟 < 𝑏𝑚 .
Seconda specie
Fm
Fr
Resistenza tra fulcro e forza motrice.
E’ sempre vantaggiosa.
Un esempio di leva di secondo genere è lo schiaccianoci: in questo attrezzo , la forza applicata dalla
mano riesce a rompere la noce (il cui limite di rottura costituisce la resistenza), facendo leva sul
punto di giunzione.
Terza specie
Fm
Fr
Forza motrice tra fulcro e resistenza.
La pinzetta con cui si prendono i francobolli è un esempio di questo tipo di leva
E’ sempre svantaggiosa.
20
LA PRESSIONE E L’EQUILIBRIO DEI FLUIDI
Data una superficie S su cui agisce una forza F, si definisce PRESSIONE, esercitata dalla forza F sulla
superficie S, il rapporto tra la componente perpendicolare 𝐹⊥ della forza F alla superficie S.
𝐹⃗
𝐹⊥
S
In formule: 𝑃 =
𝐹⊥
𝑆
la pressione si misura, quindi in N/m2 . Tale unità di misura prende il nome di Pascal
(simbolo Pa). 1Pa corrisponde alla pressione esercitata dalla forza di 1N su una superficie di 1m 2. Essa è
una grandezza scalare derivata.
Per fluido si intende una sostanza che non ha una forma propria ma si adatta al recipiente che la contiene.
Allora per fluido si intende un gas o un liquido. Le forze esercitate dai fluidi o sui fluido sono sempre
distribuite sulla superfici dei recipienti che li contengono, sulle superfici dei corpi che vi sono immersi.
Di conseguenza, tali forze sono sempre descritte mediante le pressioni che producono.
Il Principio di Pascal afferma che la pressione esercitata su un fluido in quiete si distribuisce in tutti i punti
del fluido uniformemente e agisce con la stessa intensità in tutte le direzioni. Su tale principio si basa il
funzionamento del sollevatore idraulico che serve a sollevare pesi amplificando la forza applicata.
F1
F2
S1
21
Dette S1 e S2le superfici di base dei due cilindri, F1 e F2 le forze applicate sui due pistoni, poiché per il
Principio di Pascal, la pressione è costante si ha:
𝐹1
𝑆1
=
𝐹2
𝑆2
⟹ 𝐹1 = 𝐹2
𝑆1
𝑆2
Per esempio se S2 è il doppio di S1, per sollevare lo stantuffo del cilindro più largo si deve applicare una
forza F1 di intensità pari alla metà di F1.
LEGGE DI STEVIN
Consideriamo un recipiente cilindrico di area di base A contenete un liquido.
Supponiamo che h sia l’altezza raggiunta dal pelo libero del liquido, allora sulla base del cilindro agirà un
pressione data da:
h
S
𝑃=
𝑚𝑔 ℎ
∙ = 𝑔𝑑ℎ
𝑆 ℎ
Essendo d = m/(S2h) = m/V la densità del liquido.
La pressione idrostatica P esercita da un fluido è direttamente proporzionale alla profondità h e alla densità
del liquido (g è l’accelerazione di gravità 9,81N/Kg).
VASI COMUNICANTI
Si realizzano collegando tra loro recipienti di diversa forma con un tubicino, in modo tale che il liquido
versato possa raggiungere tutti i contenitori. Quando si versa del liquido in un contenitore, il livello del
22
liquido in essi si alza fino a che non è uguale in tutti i rami. Se calcoliamo la pressione sulla base di ogni
contenitore otterremmo per la legge di Stevin, lo stesso valore per tutti i recipienti dal momento che il
liquido e l’altezza raggiunto sono sempre gli stessi.
Principio dei vasi comunicanti: il liquido posto in due o più recipienti collegati tra loro raggiunge la stessa
altezza in tutti i recipienti indipendentemente dalla loro forma e dalle loro dimensioni.
Il principio di Archimede
Un corpo parzialmente o totalmente immerso in un liquido riceve una spinta verso l’alto pari al peso del
volume del liquido spostato.
Se la densità del liquido è maggiore di quella del corpo, esso galleggia.
Se la densità del liquido è minore di quella del corpo, esso affonda.
Se la densità del liquido è uguale a quella del corpo, esso rimane in equilibrio.
La pressione atmosferica
Dal momento che la nostra atmosfera è di natura gassosa, i gas che la compongono esercitano una
pressione detta pressione idrostatica. Questa è dovuta al peso della colonna d’aria presente nell’atmosfera
che ci sovrasta.
23
Calcolo della pressione atmosferica (esperienza di Torricelli)
La pressione atmosferica fu calcolata da Evangelista Torricelli con un dispositivo chiamato
barometro a mercurio. Esso è costituito da u8n tubo di vetro lungo 1m con sezione di 1cm 2 chiuso
ad un estremità, riempito completamente di mercurio, ed una bacinella piena anch’essa di
mercurio. Tenendo con un dito chiuso l’estremità del tubo, lo si capovolge dentro la bacinella, si
libera poi l’apertura, e si osserva che il mercurio contenuto nel tubo scende fino ad un’ altezza di
76cm (in condizioni standard e a livello del mare) al di sopra del livello di mercurio contenuto nella
bacinella.
76cm
Patm
C
All’ equilibrio la pressione esercita nel punto C dal mercurio contenuto nel tubicino è la stessa della
Patn per il principio di Pascal, e si ha applicando la legge di Stevin:
𝑃𝑎𝑡𝑚 = 𝑔𝑑𝐻𝑔 ℎ = 9,81 N/kg * 13600 kg/m3 *0,76 m = 101300 Pa
Per la pressione atmosferica sono utilizzate anche altre unità di misura:
1 atm = 760 mmhg =769 torr = 1,013 bar = 101300 Pa.
La pressione atmosferica è massima a livello del mare (101300 Pa) e diminusce all’aumentare dell’
altitudine.
24
I MANOMETRI
Il più semplice dispositivo per calcolare la pressione del gas contenuto in un recipiente è il
manometro ad U. Tale strumento è costituito da un tubo di vetro a forma di U e contenente un
liquido. Se entrambi i rami del tubo sono aperti, il liquido si dispone per il principio dei vasi
comunicanti allo stesso livello. La pressione che agisce in essi è data dalla somma di due pressioni:
la pressione idrostatica del liquido e la pressione atmosferica che agisce sopra il liquido. Quando
un ramo del manometro viene messo in comunicazione con un recipiente contenente un gas che
ha la pressione diversa da quella atmosferica, il liquido si dispone a livelli differenti nei due rami, in
modo da ristabilire con il suo peso l’equilibrio tra le pressioni. In queste condizioni, la differenza tra
i due livelli del liquido consente di calcolare la pressione del gas.
Pgas
Patm
Δh
hB
hA
25
Infatti, se Pgas è la pressione del gas e Patmè la pressione atmosferica, in condizioni di equilibrio si ha:
Pgas + PB = Patm + PA
Dove PA e PB sono le pressioni idrostatiche nei rispettivi rami del tubo. Quindi, la differenza tra la pressione
del gas e quella atmosferica è uguale alla differenza tra le due pressioni idrostatiche:
Pgas – Patm= = PA – PB
Per la legge di Stevin si ha:
Pgas – Patm = g d (hA – hB)
Se la pressione del gas è maggiore di quella atmosferica, il livello del ramo A è maggiore di quello del
ramo B: hA>hB .
Al contrario se la pressione del gas è minore di quella atmosferica, allora: hA< hB.
CINEMATICA
La cinematica studia il movimento dei corpi non considerando le cause che hanno generato tale moto.
La vita quotidiana è caratterizzata da corpi che si muovono lungo traiettorie della più svariata forma, ad
esempio una mosca che vola in una stanza compie traiettorie curvilinee . Prima di tutto per studiare il moto
di un punto materiale occorre fissare un sistema di riferimento che a seconda dei casi può essere
monodimensionale, bidimensionale, tridimensionale.
Si definisce MOTO RETTILINEO un moto che avviene lungo una determinata direzione. Noi tratteremo solo
moti unidirezionali, lo spostamento del punto materiale avviene lungo una retta, in particolare si definisce
vettore spostamento il vettore che indica il passaggio del punto materiale considerato da A a B lungo la
⃗⃗⃗⃗⃗ .
direzione passante per A e B e si indica con ∆𝑆
Considerato un punto materiale che si sposta di moto rettilineo da A a B, sia Δt l’ intervallo di tempo
necessario al passaggio da A a B si definisce velocità del punto materiale il vettore dato da:
⃗⃗ =
𝑉
⃗⃗⃗⃗⃗
∆𝑆
∆𝑡
𝑠𝑖 𝑚𝑖𝑢𝑟𝑎 𝑖𝑛
𝑚⁄
𝑠
⃗⃗⃗⃗⃗.
la direzione e il verso sono quelli del vettore spostamento ∆𝑆
Se il vettore velocità è costante si parla di moto rettilineo uniforme.
26
La traiettoria di un punto materiale è l’insieme dei punti occupati nei diversi instanti di tempo.,
mentre la legge oraria è l’equazione che rappresenta la traiettoria cioè la funzione che ad ogni
istante di tempo associa una posizione S = S (t).
Tempo (s)
0
5
10
15
Posizione (m)
0
30
60
90
Riportando i valori nel piano (t,s) si ha :
100
90
80
70
60
Spostamento(s) 50
40
Series1
30
20
10
0
0
5
10
15
20
Tempo (s)
La pendenza della retta rappresenta la velocità media.
Vettore velocità istantanea
Poiché in generale il moto di un punto materiale non avviene a velocità costante e la traiettoria non è
rettilinea ma curvilinea ha senso considerare il vettore velocità istantanea ⃗⃗⃗
𝑉𝑖 che è dato in modulo dalla
pendenza della retta tangente alla traiettoria nell’ istante considerato, e che ha direzione tangente alla
curva della traiettoria nel punto considerato e come verso quello del moto.
27
S
S = S(t)
⃗⃗⃗
𝑉𝑖
0
t0
t
⃗⃗⃗⃗⃗
∆𝑠
∆𝑠
⃗⃗ =
Essendo 𝑉
e considerando che il moto e rettilineo e uniforme in modulo 𝑉 = ∆𝑡 =cost.
∆𝑡
Quindi la legge oraria diventa facendo coincidere l’istante iniziale con lo zero
s = s0+ v t
GRAFICAMENTE NEL PIANO (t,s)
s
s = s0 + v t
s0
0
t
Nel piano (v,t) si ha :
v
v = cost.
0
t
28
Poiché la velocità nel moto rettilineo può variare solo il modulo essa in tal caso genera un ‘accelerazione
del punto materiale, definita come il rapporto tra la variazione della velocità e l’intervallo di tempo in cui
essa avviene 𝑎 =
∆𝑣
∆𝑡
𝑚
𝑠2
𝑠𝑖 𝑚𝑖𝑠𝑢𝑟𝑎 𝑖𝑛
.
Nel caso di accelerazione costante si parla di moto rettilineo uniformemente accelerato
∆𝑣
∆𝑡
𝑎=
= 𝑐𝑜𝑠𝑡.
Quindi possiamo scrivere v = v0 + a t
che nel piano (v,t) si rappresenta nel modo seguente:
v
V = v0 + a t
vo
0
t
Lo spazio percorso è dato dall’area del trapezio di figura:
𝑠=
𝑣0 + 𝑣0 + 𝑎𝑡
1
∙ 𝑡 = 𝑎𝑡 2 + 𝑣0 𝑡
2
2
Se il punto materiale nell’ istante iniziale si trova nella posizione s0 la legge oraria diventa:
1
𝑠 = 𝑎𝑡 2 + 𝑣0 𝑡 + 𝑠0
2
Nel piano (t,s) essa rappresenta un ramo di parabola :
v
s0
0
t
29
CADUTA DEI GRAVI
Il moto libero di corpi soggetti a gravità è detto caduta dei gravi.
La legge oraria è 𝑠 =
1
𝑔𝑡 2
2
+ 𝑣0 𝑡 + 𝑠0
DINAMICA
La dinamica studia il moto dei corpi preoccupandosi delle cause che lo hanno generato, cioè le forze.
Essa si basa su tre principi.
Primo Principio
Un corpo permane in quiete o in moto rettilineo uniforme fin quando non intervengono forze
esterne che lo modificano.
Secondo principio o legge di Newton
L’accelerazione subita da un corpo in seguito all’ applicazione di una forza è direttamente
proporzionale alla forza applicata e inversamente proporzionale alla sua massa.
𝐹⃗ = 𝑚 ∙ 𝑎⃗
Le forze si misurano in Newton (N).
1N è la forza che serve a 1 kg di massa per assumere l’accelerazione di 1 m/s2
Noi tratteremo casi in cui 𝐹⃗ e 𝑎⃗ sono paralleli quindi si può ragionare un termini scalari.
Terzo principio
Se un corpo esercita su un’ altro un azione quest’ultimo esercita sul primo una reazione uguale ed
opposta.
⃗⃗⃗⃗⃗⃗⃗
⃗⃗⃗⃗⃗⃗⃗
𝐹𝐴𝐵 = −𝐹
𝐵𝐴
La forza di attrito si oppone ai movimenti relativi tra in corpi e per questo motivo è diretta in senso
contrario al movimento. Dipende:
dalle caratteristiche delle superfici a contatto.
dalla forza N con cui il corpo preme sulla superficie di contatto (maggiore è la forza N
maggiore è la forza d’attrito 𝐹𝑎 ).
30
L’ attrito statico rappresenta la forza necessaria a mettere in movimento un corpo (attrito di primo
distacco). La forza d’attrito risulta direttamente proporzionale alla forza premente N esercitata dal corpo
sulla superficie d’appoggio tramite il coefficiente (d’attrito) 𝜇𝑠 .
𝐹 = 𝜇𝑠 ∙ 𝑁
F
Fs
N
Si parla invece di attrito dinamico
quando il corpo è in movimento. 𝜇𝑠 > 𝜇𝑑
IL LAVORO E L’ENERGIA
Si dice che una forza compie lavoro quando sposta il suo punto di applicazione lungo la propria retta
d’azione: 𝐿 = 𝐹 ∙ ∆𝑠
Si misura in N*m = Joule
F
Δs
1J è il lavoro compiuto dalla forza di 1N per spostare il suo punto di applicazione di 1m lungo la propria
retta d’azione.
POTENZA
La potenza è data dal rapporto tra il valore delle forza e l‘ intervallo di tempo in cui essa agisce.
𝑃=
𝐿
∆𝑡
𝑠𝑖 𝑚𝑖𝑠𝑢𝑡𝑎 𝑖𝑛 𝑤𝑎𝑡𝑡
1w è la potenza sviluppata dalla forza di 1N in 1s.
31
L’ energia è la capacità di un corpo di compiere lavoro Essa può essere di due tipi energia potenziale dovuta
alla quota assunta dal corpo ed energia cinetica dovuta alla velocità acquistata dal corpo .
Sapendo che:
𝐿 = 𝐹 ∙ ∆𝑠 = 𝑚 ∙
La quantità K =
1
𝑚𝑣 2
2
∆𝑣 𝑣2 + 𝑣1
1
1
∙
𝑡 = 𝑚𝑣22 − 𝑚𝑣12 = 𝛥𝐾
𝑡
2
2
2
è detta energia cinetica.
Dove v2 ev1 sono le velocità rispettivamente finale e iniziale.
TEOREMA DELL’ ENERGIA CINETICA
Il lavoro compiuto da una forza è pari alla variazione di energia cinetica tra l’ istante finale e quello iniziale.
L ‘ ENERGIA POTENZIALE è data da:
U=mgh
essa rappresenta il lavoro compiuto dalla forza peso per
spostare il suo punto di applicazione lungo la verticale da A a B (distanti h).
Se si considera un punto che passa dalla quota A a quella B, il lavoro per effettuare tale spostamento è pari
all’ opposto variazione di energia potenziale:
𝐿 = −𝛥𝑈
A
mg
HA
B
HB
ENERGIA POTENZIALE ELASTICA
Essa rappresenta il lavoro che compie la forza elastica quando è compressa o allungata di un tratto ∆𝑥.
32
𝐿 = 𝐹𝑒 ∙ ∆𝑥 =
𝑘𝛥𝑥 + 0
1
∙ ∆𝑥 = 𝑘∆𝑥 2
2
2
Forze come la forza peso e la forza elastica sono forze conservativa cioè il lavoro compito da tali forze
quando spostano il loro punto di allocazione da A a B dipende solo dalla posizione finale e iniziale e non
dalla traiettoria percorsa da A a B. In particolare risulta che il lavoro compiuto da tali forze lungo una
traiettoria chiusa è nullo.
TEOREMA DI CONSERVAZIONE DELL ENERGIA MECCANICA
Se un corpo è soggetto a sole forze conservative, l’ energia meccanica cioè la somma dell’ energia
potenziale e cinetica nel passaggio da A a B rimane costante:
𝐿 = −∆𝑈
𝐿 = ∆𝐾 ⟹ 𝛥𝑈 + 𝛥𝐾 = 0 ⟹ 𝑈 + 𝐾 = 𝑐𝑜𝑠𝑡.
CALORE E TEMPERATURA
Il calore è una forma di energia che viene scambiata tra corpi a differenti temperature. Invece è molto
difficile dare una definizione esatta di temperatura di un corpo in quanti essa può risultare soggettiva,
tuttavia essa è una grandezza fondamentale scalare che ci indica lo stato termico di un corpo, ci dà cioè
un’informazione su quanto sia caldo oppure freddo un corpo.
L’ unità di misura nel sistema internazionale è il grado Celsius (simbolo °C) ma si può usare anche un’altra
unità di misura il Kelvin. Non esistono temperature con Kelvin negativo. La relazione tra grado Celsius e
Kelvin è la seguente 𝑇(𝐾) = 𝑇(°𝐶) + 273.
Il termometro è lo strumento utilizzato per misurare la temperatura. Tale strumento si basa sulla
dilatazione del liquido (solitamente mercurio) con l’aumentare della temperatura.
Questo strumento utilizza per questo un metodo indiretto per la misura della temperatura, va quindi
tarato. Si fissa il primo punto corrispondente alla temperatura del ghiaccio e la si pone uguale a 0°C, poi si
fissa il secondo punto corrispondente alla temperatura di ebollizione del ‘acqua e la si pone uguale a 100°C.
Suddividendo l’intervallo compreso tra i due punti in 100 parti uguali ciascuna detta grado si ottiene il
termometro tarato in gradi centigradi.
33
LEGGE DI DILATAZIONE LINEARE
La variazione di lunghezza ∆𝐿 di un corpo è direttamente proporzionale alla variazione di temperatura e alla
lunghezza iniziale tramite una costante di proporzionalità λ detta coefficiente di dilatazione termica lineare
caratteristico del materiale:
∆𝐿 = 𝜆𝐿0 Δ𝑇
Nel SI il coefficiente λ si misura in 1/K.
LEGGE DI DILATAZIONE VOLUMICA
La variazione di volume ΔV di un corpo è direttamente proporzionale alla variazione di temperatura e al
volume iniziale V0 tramite un coefficiente di proporzionalità α detto coefficiente di dilatazione volumica
caratteristico del materiale:
Δ𝑉 = 𝛼𝑉0 Δ𝑇
Nel SI il coefficiente α si misura in 1/K.
Risulta α = 3λ .
Se forniamo calore ad un corpo esso subisce un’ aumento di temperatura. Discorso inverso va fatto se
sottraiamo (raffreddiamo) calore, cioè il corpo subisce una diminuzione della temperatura.
Sperimentalmente si è visto che vale la seguente legge sulla termologia:
𝑄 = 𝑐𝑚Δ𝑇
𝐽
Il coefficiente c è detto calore specifico del materiale di massa m e si misura in 𝑘𝑔𝐾 e rappresenta il calore
che bisogna fornire ad 1kg della sostanza per farle aumentare di 1°C.
La quantità C = cm è detta capacità termica della sostanza e indica la capacità di assorbire o cedere calore.
L’ acqua ha un’ ottima capacità termica.
Joule inventò un dispositivo chiamato in suo onore mulinello di Joule grazia al quale trovo l’equivalente
meccanico della caloria. Infatti il calore può essere misurato anche in calorie (simbolo cal).
34
mulinello
termometro
m
H2O
Joule eguagliò il lavoro compiuto dalla forza peso agente su m quando esso si sposta di una determinata
quantità al calore assorbito dall’ acqua a causa della rotazione delle palette (aumenta l’agitazione termica
che è direttamente proporzionale alla temperatura) leggendo il conseguente aumento di temperatura
sull’apposito termometro. Si trova che : 1 cal = 4,186 J
PRIMO PRINCIPIO TERMODINAMICA
La termodinamica si occupa dei rapporti tra energia meccanica ed energia termica.
Si definisce energia interna di un sistema l’energia di posizione delle molecole, è un’energia che tiene conto
dell’ interazione tra le molecole. Si misura in Joule
Enunciato:
La variazione dell’ energia interna ΔU di un sistema è uguale alla somma algebrica del calore
scambiato Q e del lavoro L scambiati dal sistema con l’ambiente esterno.
∆𝑈 = 𝑄 − 𝐿
SECONDO PRINCIPIO DELLA TERMODINAMICA
L’ entropia ΔS dell’ universo (disordine) aumenta sempre ∆𝑆 > 0
35
LA PROPAGAZIONE DEL CALORE
Il trasferimento o la propagazione del calore può avvenire in tre modi diversi:
Conduzione si verifica in un solido tra i solidi a contatto a temperatura diversa, non c’è trasporto di
materia.
Convezione si verifica nei liquidi. Ad esempio, un termosifone riscalda tutta una stanza perché l’aria
che è diventata calda vicino al termosifone si dilata diventando meno densa e sale verso l’alto
facendo posto ad aria più fredda.
Irraggiamento si verifica nel vuoto. Il sole irraggia la Terra trasmettendo energia che si propaga in
assenza di materia cioè nel vuoto.
PASSAGGI DI STATO
La materia si presenta in tre stati di aggregazione:
SOLIDO in cui le sostanze hanno forma e volume proprio.
LIQUIDO in cui le sostanze hanno volume proprio ma non la forma che è quella del recipiente.
GASSOSO O AREIFORME in cui le sostanze non hanno ne volume ne forma propria.
Fornendo calore ad una sostanza è possibile portarla ad un diverso stato di aggregazione delle molecole;
queste trasformazioni vengono dette passaggi o cambiamenti di stato.
Brinamento
Fusione
SOLIDO
Vaporizzazione
LIQUIDO
Solidificazione
GAS
Liquefazione
Sublimazione
36
Leggi dei passaggi di stato:
A parità di pressione, ogni sostanza subisce i propri passaggi di stato sempre alla stessa
temperatura.
Durante il cambiamento di stato la temperatura si mantiene costante.
Ogni sostanza per cambiare il proprio stato ha bisogno di una ben precisa quantità di calore per
unità di massa, detta calore latente del cambiamento di stato.
Le temperature e i calori latenti sono diversi per ogni sostanza.
Per ogni sostanza il calore latente cambia a seconda della trasformazione fatta o subita dalla
sostanza.
ELETTROSTATICA
Tutta la materia è costituita da atomi che sono elettricamente neutri. L’ atomo è formato da un nucleo
centrale che contiene protoni (cariche positive) e neutroni (cariche neutre) quindi il nucleo è positivo e da
elettroni (cariche negative) che orbitano intorno ad esso. Il numero di protoni è uguale al numero di
elettroni. Quando un atomo acquista (perde) elettroni si dice che si ionizza negativamente (positivamente).
Le forze che si esercitano tra loro le cariche elettriche sono dette forze elettrostatiche.
L’ elettrizzazione di un corpo può avvenire in tre modi diversi:
L’elettrizzazione per strofinio. Si ottiene strofinando tra loro due corpi neutri ad esempio vetro e
plastica. Gli elettroni passano dalla lana alla plastica che si elettrizza negativamente.
Permane dopo lo strofinio.
L’elettrizzazione per contatto. Avviene mettendo a contatto un corpo elettrizzato con un corpo
neutro. Si ha passaggio delle cariche in eccesso dal corpo elettrizzato a quello neutro.
Permane anche quando i corpi vengono allontanati.
L’elettrizzazione per induzione. Si ha avvicinando un corpo elettrizzato ad uno neutro.
37
Essa e causata dalla separazione delle cariche all’interno del corpo neutro. Tale fenomeno dura
finchè agisce la causa che lo ha generato. Allontanando il corpo neutro la carica indotta in esso
scompare e si ha una distribuzione casuale dell’ orientamento delle molecole.
Particella
Elettrone
Protone
Neutrone
Simbolo
e
p
n
Massa (kg)
9,109∙10-31
1,672∙10-27
1,675∙10-27
Carica (C)
-1,6022∙10-19
+1,6022∙10-19
0
Possiamo dire che cariche elettriche di segno uguale si respingono mentre cariche di segno opposto
si attraggono secondo la legge di Coulomb:
La forza attrattiva o repulsiva tra due cariche elettriche puntiformi ha intensità direttamente
proporzionale al prodotto delle cariche e inversamente proporzionale al quadrato della loro
distanza:
𝑞𝑄
𝐹 = 𝑘 𝑟2
K è la costante di proporzionalità e nel vuoto vale K0 = 8,999∙109
𝑁∙𝑚2
𝐶2
Due cariche elettriche uguali sono pari a 1C se poste nel vuoto ad una distanza di 1m tra loro si
attraggono con una forza di 8,999∙109 N.
IL CAMPO ELETTRICO
Si dice che una carica elettrica genera intorno a sé un campo elettrico,nel senso che modifica le proprietà
dello spazio circostante in modo che una qualunque carica posta nelle vicinanze viene sollecitata da una
forza di natura elettrica. Il campo elettrico, indicato con𝐸⃗⃗ , generato dalla carica sorgente Q nel punto in cui
si trova la carica di prova +q è una grandezza vettoriale dal momento che è definito come dal rapporto tra
il vettore forza elettrica e la carica di prova +q.
𝐸⃗⃗ =
𝐹⃗
𝑞
Nel SI l’unità di misura è il N/C
Più cariche producono in un qualunque punto dello spazio che li contiene un campo elettrico che è la
risultante vettoriale dei singoli campi.
38
Il modulo del campo elettrico è dato da:
𝑄𝑞
𝑄
2
𝐸=𝑘 𝑟 =𝑘 2
𝑞
𝑟
Un campo elettrico si dice uniforme se il vettore 𝐸⃗⃗ ha la stessa direzione, lo stesso verso e la stessa
intensità in ogni punto.
Il campo elettrico può essere rappresentato graficamente dalle cosiddette linee di campo che nel caso di
una sola carica si distribuiscono radialmente. Sono uscenti se la carica è positiva entrante se la carica è
negativa, la loro orientazione coincide con quella della campo elettrico 𝐸⃗⃗ .
+
-
Il dipolo elettrico è formato da due cariche uguali, le linee di forza sono così rappresentate:
39
DIFFERENZA DI POTENZIALE
Sappiamo che il lavoro fatto per spostare una carica da un punto A a un punto B è dato da:
𝐿𝐴𝐵 = 𝐹 ∙ ∆𝑠 = 𝑞𝐸 ∙ ∆𝑠 ⟹
𝐿𝐴𝐵
𝑞
= 𝐸𝛥𝑠 = 𝛥𝑉𝐴𝐵
La d.d.p. rappresenta il lavoro fatto dal campo elettrico per spostare una carica unitaria da A a B
L’ unità di misura nel sistema internazionale della grandezza scalare ΔV è il Volt (simbolo V).
Si dice che la d.d.p. è 1V quando il lavoro fatto per spostare la carica di 1C da A a B è di 1J.
V = J/C
Corrente elettrica
La corrente elettrica è un flusso di elettroni all’ interno di un conduttore generata da una differenza di
potenziale tra due suoi punti.
Essa rappresenta la quantità di carica che passa in una sezione del conduttore nell’ intervallo di tempo Δt.
𝑞
𝑖 = ∆𝑡
si misura in C/s . Tale unità di misura prende il nome di Ampere (simbolo A).
La corrente è di 1° quando nella sezione del conduttore passa la carica di 1C in 1s.
Effetto Joule
Quando in un conduttore circola corrente elettrica gli elettroni che si muovono urtano tra loro e contro le
pareti del conduttore perdendo energia cinetica la quale per la conservazione dell’ energia si traforma in
calore facendo aumentare la temperatura del conduttore. Su questo principio si basa il funzionamento
delle stufe elettriche.
La quantità di calore risulta direttamente proporzionale al quadrato dell’ intensità di corrente e all
intervallo di tempo Δt del flusso di corrente:
𝑄 ∝ 𝑖 2 ∆𝑡 ⇒
𝑄
𝑖 2 𝛥𝑡
= 𝑐𝑜𝑠𝑡. (𝑟𝑒𝑠𝑖𝑠𝑡𝑒𝑛𝑧𝑎 𝑅) ⟹ 𝑄 = 𝑅𝑖 2 ∆𝑡
Sapendo che il lavoro necessario per portare una carica da un punto A a B è:
𝐿 = 𝑞∆𝑉 = 𝑖∆𝑡∆𝑉
40
Tale lavoro si trasforma integralmente il calore e si ha:
𝑄 = 𝐿 ⇒ 𝑅𝑖 2 ∆𝑡 = 𝑖∆𝑡∆𝑉
⇒ ∆𝑉 = 𝑅𝑖
Qusta relazione prende il nome di prima legge di Ohm.
La d.d.p.applicata ai api di un conduttore è direttamente proporzionale all’intensità di corrente che lo
attraversa. La costante di proporzionalità prende il nome di resistenza. La sua unità di misura è Ohm
(simbolo Ω). Ω = 𝑉⁄𝐴 . La resistenza è di 1Ω se applicando una d.d.p. di 1V circola la corrente di 1°.
ΔV
0
i
La pendenza di questa retta rappresenta il valore della resistenza R.
Seconda legge di Ohm
La resistenza R di un conduttore dipende dal materiale di cui è fatto, ed è direttamente proporzionale alla
sua lunghezza l e inversamente proporzionale alla sua sezione S.
𝑅=𝜌
𝑙
𝑆
Dove 𝜌 è la costante di proporzionalità e si chiama resistività del materiale.
Nel SI la sua unità di misura è Ohm 𝑝𝑒𝑟 metro (simbolo Ω ∙ 𝑚) .
41
Resistenze in serie e in parallelo
Le resistenze (o anche resistori) sono componenti fondamentali dei circuiti elettrici e possono venire
collegati in serie o in parallelo.
Collegamento in serie
In un circuito con più resistenze collegate in serie (disposti l’uno di seguito all’altro) l’intensità della
corrente è la stessa in ogni punto del circuito, mentre la d.d.p. del circuito è pari alla somma delle d.d.p. ai
capi delle singole resistenze.
R1
R2
R3
i
+ -
∆𝑉 = ∆𝑉1 + ∆𝑉2 + ∆𝑉3 = 𝑅𝑖 = 𝑅1 𝑖 + 𝑅2 𝑖 + 𝑅3 𝑖 ⇒ 𝑅 = 𝑅1 + 𝑅2 + 𝑅3
La resistenza equivalente del circuito costituito da più resistenze collegate in serie è dunque data dalla delle
singole resistenze.
42
Collegamento in parallelo
Esso prevede che tutte le entrate delle resistenze vengano collegate insieme da una parte e tutte le uscite
insieme dall’ altra.
R1
i1
i2
R2
i3
R3
+
𝑖=
-
∆𝑉
1
1
1
1
1
1
1
= 𝑖1 + 𝑖2 + 𝑖3 = ( +
+ ) ∆𝑉 ⇒
=
+
+
𝑅
𝑅1 𝑅2 𝑅3
𝑅 𝑅1 𝑅2 𝑅3
L’inverso della resistenza equivalente di un circuito in parallelo è dato dalla somma degli inversi delle
singole resistenze.
MAGNETISMO
Lo studio del magnetismo cominciò con l’osservazione del comportamento di un materiale ferroso, detto
magnetite. Fin dalle antichità era noto che la magnetite (minerale ferroso) aveva la capacità di attirare a sé
gli oggetti ferrosi. Tale fenomeno è detto magnetizzazione. I frammenti che si ottengono dalla magnetite
sono detti magneti naturali. Il ferro, il nichel, il cobalto hanno la capacità di magnetizzarsi a contatto con la
magnetite e sono detti per questo ferromagnetici. Tali materiali acquistano una magnetizzazione
permanente a contatto con la magnetite e per questo sono detti magneti artificiali o calamite alle quali
vengono date forme diverse: lineare, a ferro di cavallo, ecc…
I materiali ferromagnetici sono fortemente attratti da un magne naturale mentre i materiali diamagnetici
(l’acqua, la grafite, il quarzo) sono debolmente respinti dalla magnetite. Infine, i paramagnetici (l’alluminio
e il sodio) vengono debolmente attratti dalla magnetite. Le proprietà attrattive della calamita sono
43
concentrate alle sue estremità, mentre nella zona centrale una calamità e neutra..Le sue estrimità sono
dette poli magnetici. I poli magnetici di una calamita attirano la limatura di ferro o piccoli pezzi di ferro
posti nelle sue vicinanze. Essi sono detti polo Nord e polo Sud. Un magnete è sempre composto da due poli
uno Nord e l’altro Sud che non possono essere separati In altre parole se spezziamo un magnete in due
parti ogni una di esse avrà sempre un polo Nord e uno Sud.
Poli dello stesso nome si respingono
Poli di nome diverso si attraggono
Lasciata libero di ruotare, una calamita a forma di barretta (o di ago) si dispone naturalmente con una delle
sue estremità (e sempre la stessa) in una direzione che individua approssimativamente il polo Nord
geografico della Terra e perciò il polo magnetico che punta verso il Nord geografico è detto polo Nord e
l’atro polo Sud (magnetismo terrestre).
Il campo magnetico
Se, avvicinando due magneti, questi si attraggono o si respingono a seconda dell’orientamento dei rispettivi
poli, significa che esercitano l’uno sull’altro una forza a distanza (forza magnetica). Come per i fenomeni
elettrici e per le forze gravitazionali risulta utile descrivere le interazioni magnetiche utilizzando il concetto
di campo. Un campo magnetico è la regione di spazio in cui sono sensibili le forze di attrazione e repulsione
esercitate da un magnete. Esso si rappresenta mediante linee di forza che rappresentano la direzione lungo
la quale si disporrebbe un ago magnetico (usato come magnete di prova) posto in quel punto.
Rappresentazione delle linee di forza per un magnete a sbarretta:
44
Rappresentazione delle linee di forze del campo magnetico terrestre:
Come per il campo elettrico le zone dove le linee sono piu ditte (vicino ai poli) indicano un’intensità
maggiore del campo magnetico.
⃗⃗ ed è in
Il campo magnetico è una grandezza vettoriale dotata di una direzione e un verso, si indica con 𝐵
vettore tangente alle linee di forza.
Le correnti elettriche generano campi magnetici, infatti se poniamo un ago magnetico in prossimità di un
filo percorso da corrente, si osserva che l’ago magnetico si muove disponendosi a 90° rispetto al filo
conduttore (ELETTROMAGNETISMO).
45
46
INTERAZIONE TRA CAMPO MAGNETICO E CORRENTE ELETTRICA
Poiché il campo magnetico di una corrente agisce di un ago orientandolo, si può supporre che un campo
magnetico possa interagire con un conduttore percorso da corrente. Fu il fisico Faraday a scoprire questo
effetto utilizzando un dispositivo come quello in figura, inserendo un filo percorso da corrente elettrica i
all’interno di un campo magnetico uniforme come quello generato da due espansioni polari.
N
⃗⃗
𝐵
i
S
𝐹⃗
47
L’ intensità della forza 𝐹⃗ è direttamente proporzionale all’intensità della corrente i, alla lunghezza l del filo
immerso nel campo magnetico e alla componente perpendicolare del campo magnetico 𝐵⊥ alla direzione
⃗⃗ la forza 𝐹⃗ è nulla.
della corrente. Se il conduttore è parallelo al campo magnetico 𝐵
𝐹
𝐹 = 𝑖𝑙𝐵⊥ ⟹ 𝐵⊥ = 𝑖𝑙
Nel SI l’unità di misura del campo magnetico è il Tesla.
𝑁
𝑇 = 𝐴𝑚
Il campo magnetico è di 1T quando la forza agente sul conduttore di 1m percorso da corrente elettrica di
1A è 1N.
Forze magnetiche su spira rettangolare
48
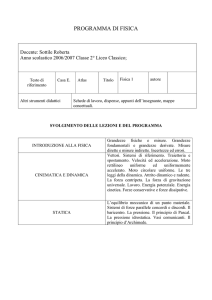
INDUZIONE ELETTROMAGNETICA
Avvicinando il magnete al solenoide si genera in quest’ultimo una corrente indotta direttamente
proporzionale alla variazione del campo magnetico e inversamente proporzionale all’intervallo di tempo in
cui si verifica. Su tale principio si basa il funzionamento dell’alternatore. Quando la spira ruota il campo
magnetico generato dal magnete induce una corrente nella spira detta corrente indotta. L’alternarsi del
verso di rotazione della spira genera una corrente che una volta scorre in un senso e poi nell’altro (corrente
alternata).
49
TRSFORMATORE
E’ costituito da un nucleo di ferro intorno al quale è avvolto un circuito primario alimentato con una
tensione (o d.d.p.) variabile e uno secondario in cui è indotta dal campo magnetico variabile generato dal
primario una corrente variabile nel secondario.
𝑉1 𝑛1
=
𝑉2 𝑛2
Se 𝑛1 > 𝑛2
⇒
𝑖𝑙 𝑡𝑟𝑎𝑠𝑓𝑜𝑟𝑚𝑎𝑡𝑜𝑟𝑒 è 𝑟𝑖𝑑𝑢𝑡𝑡𝑜𝑟𝑒.
Se 𝑛1 > 𝑛2
⇒
𝑖𝑙 𝑡𝑟𝑎𝑠𝑜𝑟𝑚𝑎𝑡𝑜𝑟𝑒 è 𝑒𝑙𝑒𝑣𝑎𝑡𝑜𝑟𝑒.
50