1
Cinematica del corpo rigido
Vediamo come si muove un sistema rigido.
Per prima cosa elimiamo dalla nostra analisi il caso "degenere" in cui tutti i punti
del sistema siano allineati (o ci siano solo due punti). Consideriamo quindi un sistema
di punti collegati tra loro in modo da mantenere invariate le loro mutue distanze e che
contenga almeno tre punti non allineati P1 , P2 , P3 .
A un tale sistema è possibile associare una terna cartesiana S = (O, i, j, k) in modo
tale che ogni punto del sistema abbia coordinate (x, y, z)T costanti nel riferimanto S;
chiameremo "solidale" una tale terna.
Un modo per costruire questo riferimento può essere il seguente: Poniamo O =
P1 , i = vers(P2 − P1 ) j = vers(i ∧ (P3 − P1 )) e infine k = j ∧ i.
Si osservi che, una volta associata una terna solidale, il numero di punti di cui è
composto il sistema non ha più importanza: ogni punto viene ora collocato nello spazio
una volta che siano note le sue coordinate nella terna solidale (che sono costanti) e la
posizione nello spazio della terna stessa. Questo ha per fondamentale conseguenza
il fatto che la cinematica dei sistemi rigidi discreti e continui è descritta dalle stesse
equazioni.
In altre parole il moto di un sistema rigido nello spazio è equivalente al moto di una
terna di riferimento.
Ovviamente possiamo parlare di "moto" solo in presenza di un "osservatore", ovvero
di un sistema di riferimento che consideriamo convenzionalemente come "fisso" e che
indicheremo con Σ = (Ω, u, v, w). Chiameremo (ξ, η, ζ)T le coordinate di un punto
nel sistema di riferimento Σ.
Poiché i punti che partecipano al moto rigido hanno coordinate (x, y, z)T costanti
nel sistema di riferimento solidale, ci basta conoscere la posizione del sistema S rispetto
al sistema Σ per localizzare ogni punto del sistema rigido in moto. Abbiamo quindi
ridotto il problema del moto rigido al moto relativo di due sistemi di riferimento nello
spazio euclideo tridimensionale, ovvero ad ogni istante situare la terna mobile S rispetto
alla terna fissa Σ.
A sua volta questo problema si scompone naturalmente nella localizzazione dell’origine
della terna mobile rispetto alla terna fissa, e all’orientazione dei versori della terna mobile rispetto ai versori della terna fissa.
Dovremo quindi conoscere le tre coordinate in Σ, (ξO , ηO , ζO )T (funzioni del
tempo), dell’origine O della terna S e le nove componenti dei versori (i, j, k) rispetto ai
versori (u, v, w). Le nove componenti dei versori sono però “vincolate” dalla ortonormalità del sistema di riferimento, ovvero dalle equazioni
i · i = 1, j · j = 1, k · k = 1, i · j = 0, j · k = 0, k · i = 0.
(1)
Com’è noto dal corso di geometria le mutue orientazioni dei versori di due riferimenti
ortonormali sono parametrizzate dalle matrici ortogonali, ovvero da quelle matrici 3×3
che soddisfano alla condizione:
AAT = I.
(2)
Poiché stiamo studiando moti continui dello spazio, possiammo escludere le matrici a
determinante negativo (che rappresentano un moto rigido più un ribaltamento specu1
lare) e limitarci alle matrici a determinante uguale a 1. Abbiamo quindi una parametrizzazione delle posizione di un sistema rigido S, relativamente a un altro sistema rigido
Σ, tramite una coppia formata dal vettore O − Ω = (ξO , ηO , ζO )T e dalla matrice A
ξˆ1
A = η̂1
ζ̂1
ξˆ2
η̂2
ζ̂2
ξˆ3
η̂3
ζ̂3
(3)
dove con (ξˆ1 , η̂1 , ζ̂1 )T si sono indicate le componenti di i nel sistema di riferimento Σ
(e similmente per j e k).
Siano (x, y, z)T le coordinate di un punto P qualsiasi solidale con il sistema di
riferimento S e (ξ, η, ζ)T le corrispondenti coordinate nel riferimento Σ; con la nostra
rappresentazione avremo quindi
ξ
ξO
ξˆ1 ξˆ2 ξˆ3
x
η = ηO + η̂1 η̂2 η̂3 y .
(4)
z
ζO
ζ
ζ̂1 ζ̂2 ζ̂3
La (4) può ora essere derivata per otterene la formula fondamentale del moto rigido,
ovvero la relazione che lega tra loro le velocità (in un sistema “fisso” dato) dei differenti
punti di un sistema rigido.
Nella (4) ci sono tre termimi che dipendono dal tempo: le coordinate dei punti P e
O nel sistema di riferimento fisso e le componenti della matrice A.
Deriviamo ora la (4).
ξ
ξ
ξˆ ξˆ2 ξˆ3
x
d
d O
d 1
η =
ηO +
η̂1 η̂2 η̂3 y .
(5)
dt
dt
dt
ζ
ζO
z
ζ̂1 ζ̂2 ζ̂3
La derivata a primo membro è la velocità del punto P, così come la giudica Σ, e
ugualmente la derivata di (ξO , ηO , ζO )T è la velocità in Σ del punto O.
Possiamo ora riscrivere la relazione (5) inserendo tra la derivata della matrice A e
il vettore (x, y, z)T la matrice identità scritta nella forma AT A e abbiamo
µ
¶
ξ
ξ
x
d
d O
dA T
η =
ηO +
A
A y .
(6)
dt
dt
dt
ζ
ζO
z
x
Il termine A y è il vettore di R3 delle coordinate del vettore geometrico P − O
z
espresse nel sistema di riferimento Σ. Osserviamo inoltre che se si sceglie un punto
diverso da O come
¢ del riferimento solidale (mantenedo però gli stessi versori
¡ origine
T
che compare nella formula non cambia. Possiamo quindi
A
i, j, k) la matrice dA
dt
dire che la distribuzione di velocità di tutti i punti di un sistema rigido si ¡ottiene ¢dalla
formula (6) quando si conosca la velocità di un punto solidale e la matrice dA
AT . Se
¡ dA T ¢dt
avessimo fatto una diversa scelta del sistema di versori, la matrice dt A si sarebbe
2
modificata con le consuete formule di cambiamento di coordinate tra sistemi di riferimento ortonormali.
Osserviamo infine una caratteristica fondamentale della matrice dA
dt . Derivando la
relazione (2) si ha
µ
¶T
dA T
dAT
dA T
dA
A +A
=
A +A
= 0.
(7)
dt
dt
dt
dt
Ricordando che AB T = (BAT )T , possiamo riscrivere la (7) come
dA T
dA T
A = −(
A) ,
dt
dt
ovvero la matrice
dA T
A è una matrice antisimmetrica. Indichiamola con
dt
0
−ω3 ω2
ω3
0
−ω1
−ω2 ω1
0
e riscriviamo la (6) come
ξ˙
ξ˙O
0
η̇ = η̇O + ω3
−ω2
ζ̇
ζ̇O
−ω3
0
ω1
ω2
ξP
−ω1 ηP ,
0
ζP
(8)
(9)
(10)
dove abbiamo indicato con (ξP , ηP , ζP )T le componenti in Σ del vettore P − O.
Se indroduciamo un vettore ω di componenti (ω1 , ω2 , ω3 )T , è immediato verificare
che il risultato del prodotto tra la matrice antisimmetrica e il vettore (ξP , ηP , ζP )T nella
(10) ha le stesse componenti del prodotto vettoriale ω ∧ (P − O). Possiamo quindi
riscrivere la (10) nella notazione “vettoriale”
Ṗ = Ȯ + ω ∧ (P − O)
(11)
detta formula fondamentale del moto rigido. Il vettore ω è detto velocità angolare.
Nota: La (11) non è una relazione vettoriale nel senso che essa mantiene la sua forma
solo per cambiamenti di coordinate ortogonali (cioè se solo se si passa da un sistema
ortonormale a un altro sempre ortonormale); questo perché sia la definizione di ω sia
quella di prodotto vettoriale fanno intervenire la struttura metrica dello spazio euclideo.
Spesso si usa l’espressione “pseudovettoriale” per riferirsi a relazioni che si conservano
solo per trasformazioni ortogonali.
La comparsa del vettore (o “pseudovettore”) ω ha un che di artificioso. Tuttavia il
suo significato cinematico può essere reso più chiaro.
Per semplificare la trattazione limitiamoci a moti in cui un punto del rigido (che
faremo coincidere con O) resti fisso. In questo caso il moto rigido si riduce a una
famiglia a un parametro di trasformazioni rigide (parametrizzate dal tempo) dello spazio
euclideo tridimensionale, con un punto fisso. Se, come abbiamo fatto sopra, fissiamo due sistemi di riferimento S e Σ, avremo ancora una matrice ortogonale A(t)
3
dipendente dal tempo, che ci fornisce le coordinate in Σ in funzioni delle coordinate
(costanti) dei punti del rigido nel sistema solidale S.
Consideriamo per iniziare il caso in cui il moto rigido sia una “rotazione uniforme”
attorno a un asse fisso (per fissare le idee facciamolo coincidere con l’asse delle ζ nel
sistema fisso e con l’asse delle z nel sistema solidale). In questo moto tutti i punti che
giacciono sull’asse delle z sono fermi mentre gli altri punti descrivono delle circonferenze con centro sull’asse delle z e su piani a esso perpendicolari. Questa rotazione è
uniforme se si descrivono angoli uguali in tempi uguali (nota che tutti i punti descrivono
lo stesso angolo!): il rapporto tra l’angolo percorso (con segno) e il tempo impiegato è
ciò che si dice “velocità angolare”: la matrice A(t) associata a questo moto rigido ha
la forma
cos(ωt) sin(ωt) 0
A(t) = − sin(ωt) cos(ωt) 0
0
0
1
dove ω è ora il rapporto (costante) che abbiamo chiamato velocità angolare. Se fissiamo un valore qualsiasi del tempo la trasformazione che porta il sistema dalla sua
configurazione iniziale a quella occupata al tempo fissato si dice una “rotazione finita”.
È immediato verificare che il vettore velocità angolare associato al nostro moto
dalla costruzione che ci ha portato alla (11) è dato da (0, 0, ω), ovvero ha per direzione
l’asse di rotazione per modulo il rapporto tra angolo percorso e tempo di percorrenza
e per verso quello delle z crescenti o decrescenti a seconda che la rotazione avvenga
concordemente o non con l’orientazione degli assi (ovvero “portando l’asse positivo
delle x su quello delle y o viceversa”).
La generalizzazione al caso di una rotazione non uniforme è un semplice richiamo
della definizione di derivata!
Le rotazioni però non esauricono tutti i possibili moti rigidi. Tuttavia se fissiamo
un intervallo tempo e andiamo a vedere in quale configurazione si trova al tempo t un
sistema rigido S che all’istante 0 coincideva con il sistema fisso Σ abbiamo il seguente
risultato, noto come teorema di Eulero:
Teorema: Ogni trasformazione rigida dello spazio euclideo tridimensionale è una
rotazione finita attorno a un opportuno asse.
Questo significa che, qualunque sia stato il moto rigido effettivamente svolto per
assumere la configurazione finale, una intera retta di punti solidali è tornata ad occupare
la posizione che occupava inizialmente. La differenza con una rotazione è che, mentre
nella rotazione i punti dell’asse stanno fermi durante tutto il moto, nel caso generale i
punti che a un istante fissato occupano la loro posizione iniziale possono essersi mossi
nell’intervallo di tempo compreso. Inoltre, poiché quanto detto vale per un tempo
qualsiasi, ad ogni istante del moto c’è una retta solidale di punti che occupano la loro
posiazione iniziale. Ancora la differenza con la rotazione sta nel fatto che questa retta
non ha giacitura costante, ovvero varia sia nel sistema fisso che in quello mobile (in
altre parole: i punti (solidali) che sono tornati nella loro posizione iniziale al tempo
t1 non sono gli stessi che tornano al tempo t2 , e di conseguenza è anche diversa la
posizione di questa retta nel sistema fisso).
Se prendiamo il limite a un dato istante di questi assi di rotazione abbiamo la direzione definita dal vettore velocità angolare che compare nella (11).
4
La dimostrazione del teorema di Eulero si può fare per via puramente geometrica
ma risulta particolarme facile se torniamo alla nostra descrizione “algebrica” in termine
della matrice di trasformazione A(t).
Poiché lavoriamo a un tempo t fissato indichiamo la matrice di trasformazione A(t)
semplicemente con A. Da un punto di vista algebrico il fatto che ci siano dei punti
lasciati fermi dalla trasforazione associata alla matrice A significa che la matrice A ha
un autovettore associato all’autovalore 1 (dobbiamo infatti poter risovere l’equazione
Au = u).
Ci basta quindi dimostrare che A ha il numero reale 1 per autovalore. Ma A è
una matrice 3 × 3, quindi ha sicuramente un autovalore reale. Inoltre, poichè la matrice è ortogonale, la lunghezza di un autovettore associato all’autovalore reale deve
essere preservata. Quindi l’autovalore reale deve essere uguale a 1 oppure a −1. Infine
ricordiamo che la matrice A ha determinante positivo. Abbiamo quindi tre possibilità:
• tutti e tre gli autovalori sono uguali a 1
• due autovalori sono uguali a −1 e il terzo è 1
• o infine (è il caso generico) gli altri due autovalori sono complessi coniugati e
quindi hanno prodotto positivo, e di conseguenza è positivo (= 1) l’autovalore
reale.
5
1.1 Angoli di Eulero
Consideriamo ora il caso di un moto rigido con un punto che resta fisso nello spazio
durante il moto del sistema. Un tale moto prende il nome di precessione.
Senza perdere di generalità possiamo fissare le origini dei due riferimenti Σ e S
coincidenti con il punto fisso. Avremo quindi O ≡ Ω e Ȯ ≡ 0.
Vogliamo per prima cosa descrivere la posizione del sistema S rispetto a Σ tramite
tre parametri opportuni. Fissiamo quindi una posizione mutua di S e Σ e supponiamo
che, in questa configurazione, i due assi ζ e z non siano coincidenti.
Indichiamo con θ l’angolo che l’asse delle z forma con l’asse delle ζ, contato a
partire dall’asse ζ (quindi θ ∈ (0, π), vedremo in seguito che si devono escludere i casi
estremi in cui gli assi coincidono).
Inoltre osserviamo che i due piani z = 0 e ζ = 0 si intersecano lungo una retta,
che chiamiamo linea dei nodi. Sia n il versore di questa retta, orientato in modo che la
terna (non ortognale) (w, k, n) sia positivamente orientata (i.e. (w ∧ k) · n > 0 ).
Indichiamo ora con ψ l’angolo (sul piano ζ = 0) tra la linea dei nodi orientata da n
e l’asse delle ξ, contato a partire da quest’ultimo; abbiamo quindi ψ ∈ [0, 2π). Infine
poniamo φ l’angolo, sul piano z = 0, tra la linea del nodi e l’asse delle x, a partire da
quest’ultimo; ancora abbiamo φ ∈ [0, 2π).
ζ
z
θ
y
η
O
ψ
ξ
n
ϕ
x
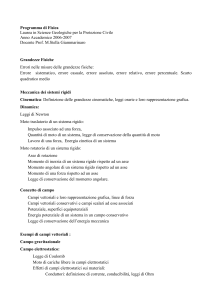
Figure 1: Angoli di Eulero
E’ abbastanza facile rendersi conto che con questi angoli, noti come angoli di Eulero, si possono rappresentare tutte le configuarazioni che S può assumere rispetto a Σ
ad eccezione di quelle dove gli assi z e ζ coincidono. Per verificare questa asserzione
dobbiamo far vedere che è possibile esprimere, in maniera univoca, la matrice che
permette di passare dalla configuzione S ≡ Σ alla configuazione individuata dai tre
angoli, in funzione degli angoli stessi; alternativamente possiamo costruire la matrice
inversa delle trasformazioni che “riportano” S a coincidere con Σ.
6
Il versore k dell’asse delle z può essere espresso tramite gli angoi di Eulero. Infatti
la componente di k lungo w è data da cos θ, mentre la sua proiezione sul piano ζ è
perpedicolare alla linea dei nodi (che è perpendicolare sia a k che alla direzione di
proiezione w). Poiché la linea dei nodi è data da n = cos ψ u + sin ψ v, ne segue che
k = sin θ cos ψ u + sin θ sin ψ v + cos θ w.
Vogliamo ora riportare S su Σ tramite la rotazione attorno a k di un angolo −φ
seguita da una rotazione attorno a w di un angolo −ψ e infine da una rotazione attorna
alla linea dei nodi (che ora coincide con l’asse delle ξ) di un angolo −θ.
1.2 Appendice
Mostriamo che una trasformazione rigida dello spazio euclideo deve essere affine,
ovvero deve avere la forma
F (X) = X0 + A(X − X0 )
(12)
dove A è una trasformazione lineare ortogonale e X0 un punto fissato dello spazio.
Ricordiamo che per trasformazione rigida si intende una qualsiasi applicazione F
dello spazio euclideo in sé tale che
d(F (X), F (Y )) = d(X, Y ) ∀X, Y
(13)
p
dove d(X, Y ) = (X − Y ) · (X − Y ) indica la distanza tra i punti X e Y . Osserviamiamo per prima cosa che (13) è vera se e solo se si ha
(F (X) − F (Y )) · (F (X) − F (Y )) = (X − Y ) · (X − Y ) ∀X, Y
(14)
Dalla relazione (14) è abbastanza semplice far vedere che se F ha la forma (12), ovvero
se è affine, allora A ∈ SO(n).
Resta da verificare che la F è affine. Scegliamo un punto O dello spazio, poniamo
X0 = F (O) e indichiamo con lettere minuscole i vettori x = X − O.
Dalla (14) abbiamo che
(F (x) − X0 ) · (F (x) − X0 ) = x · x ∀x
(15)
quindi l’applicazione g(x) = F (x) − X0 soddisfa la condizione
g(x) · g(x) = x · x ∀x
(16)
g(x) − g(y) = F (x) − F (y) ∀x, y
(17)
(g(x) − g(y))2 = (x − y)2 ∀x, y
(18)
e
e quindi
Dalle (16) e (18) segue che
g(x) · g(y) = x · y ∀x, y
7
(19)
Fissiamo ora tre vettori ortonormali u, v, w; dalla (19) segue che il vettore g(αu)
è ortogonale sia a g(v) che a g(w) e quindi deve essere g(αu) = βg(u), e inoltre
|β| = 1.
Prendiamo ora un qualsiasi vettore x e siano α, β e γ le componenti di g(x) nella
base (g(u), g(v), g(w)), i.e. sia g(x) = αg(u) + βg(v) + γg(w). Resta da far vedere
che α, β e γ sono le componenti di x nella base (u, v, w).
Ma questo segue immediatamente dal fatto che x · u = g(x) · g(u) = α, e analogamente per v e w.
2
La dinamica
2.1 Le equazioni cardinali
Consideriamo un sistema di punti materiali (Pi , mi ) per ogni punto scriviamo le equazioni
di moto
mi ai = Fi , i = 1, . . . , N .
(20)
Nel secondo membro di ognuna delle (20) scomponiamo la risultante delle forze applicate al punto Pi nella somma delle forze interne e delle forze esterne. Si intende per
forza interna una qualsiasi forza applicata a Pi la cui reazione sia applicata ad un altro
punto Pj ancora appartenente al sistema. Le forze esterne saranno tutte quelle la cui
reazione si applica a punti non apparteneti al sistema. Possiamo quindi riscrivere la
(20) come
N
X
mi ai = FE
+
Fij , i = 1, . . . , N ,
(21)
i
j=1
FE
i
la risultante di tutte le forze esterne applicate a Pi e
dove abbiamo indicato con
abbiamo scomposto le forze interne a seconda del punto di applicazione della reazione,
indicando con Fij la forza applicata a Pi con reazione applicata a Pj .
Sommiano ora le (21) sull’indice i
N
X
i=1
mi ai =
N
X
FE
i +
i=1
N
X
Fij .
(22)
i,j=1
Nel
totale del sistema M =
PNprimo membro è facile riconoscere il prodotto della massa
1
m
per
l’accelerazione
a
del
centro
di
massa
definito
da
i
0
i=1
M (P0 − O) =
N
X
mi (Pi − O) .
(23)
i=1
PN
E
Il termine FE =
poiché il
i=1 Fi è detto risultante delle forze esterne. Infine,
PN
principio di azione e reazione ci assicura che Fij = −Fji , il termine i,j=1 Fij è
nullo. Otteniamo quindi la prima equazione cardinale
M a0 = FE ,
(24)
1 Affinché la definizione sia ben posta occorre mostrare che P non dipende dal punto O scelto nella (23):
0
verificarlo!
8
che possiamo leggere: il centro di massa di un sistema meccanico si muove come un
punto materiale, avente per massa la massa totale del sistema, sotto l’azione della
risultante delle forze esterne.
Moltiplichiamo ora ognuna delle (21) vettorialmente per Pi − O dove O è un punto
arbitrariamente scelto, e sommiamole sull’indice i.
N
X
mi (Pi − O) ∧ ai =
i=1
N
X
(Pi − O) ∧ FE
i +
i=1
N
X
(Pi − O) ∧ Fij .
(25)
i,j=1
L’ultimo termine può essere riscritto
N
X
N
X
(Pi −O)∧Fij =
i,j=1
(Pi −Pj )∧Fij +
i,j=1
N
X
(Pj −O)∧Fij = −
i,j=1
N
X
(Pj −O)∧Fji
i,j=1
(26)
PN
dove i,j=1 (Pi − Pj ) ∧ Fij = 0 in quanto la forza Fij ha (Pi − Pj ) per retta di
azione. Poiché la prima e l’ultima sommatoria differiscono
solo per una ridefinizione
PN
degli indici, quindi sono uguali, otteniamo che i,j=1 (Pi − O) ∧ Fij = 0, cioè le
forze interne si cancellano anche nell’equazione (25).
Sempre con riferimento al punto O scelto nell’equazione (25), introduciamo le
quantità vettoriali momento angolare L(O) rispetto al punto O e momento risultante
delle forze esterne ME (O) rispetto al punto O, definite da
L(O) =
N
X
ME (O) =
mi (Pi − O) ∧ vi ,
i=1
N
X
(Pi − O) ∧ FE
i .
(27)
i=1
Derivando il momento angolare rispetto al tempo otteniamo
L̇(O) =
N
X
mi (Pi − O) ∧ ai +
i=1
N
X
mi v(O) ∧ vi
(28)
i=1
dove v(O) è la velocità del punto O. Possiamo quindi scrivere la (28) nella forma
L̇(O) =
N
X
mi (Pi − O) ∧ ai + v(O) ∧ M v0
(29)
i=1
Possiamo quindi riscrivere la (25) nella forma
L̇(O) = ME (O) + v(O) ∧ M v0
(30)
detta seconda equazione cardinale. Si osservi che l’ultimo termine può essere reso
nullo scegliendo un punto O che si muove con velocità parallela alla velocità del centro
di massa (in particolare le scelte più comuni sono O fisso, quindi v(O) = 0, oppure
O ≡ PO coincidente con il centro di massa stesso, v(O) = v0 ).
Le equazioni cardinali formano quindi un sistema di 6 equazioni scalari, sempre
soddisfatte dal moto del sistema. Questo implica che, in generale, le equazioni cardinali
9
non sono sufficienti per determinare il moto (e sicuramente non lo sono se il sistema ha
più di 6 gradi di libertà) e possono anche non essere indipendenti tra loro (se il sistema
ha meno di 6 gradi libertà, sicuramente alcune delle 6 equazioni scalari dipenderanno
dalle altre).
L’importanza delle equazioni cardinali è dovuta al fatto che per i sistemi rigidi esse
sono sufficienti per la determinazione del moto. Infatti per un sistema rigido libero
(cioè non soggetto ad altri vincoli oltre ai vincoli di rigidità) le equazioni cardinali
sono equivalenti all’equazione simbolica della dinamica. Nel caso che altri vincoli
(lisci) siano presenti, una parte delle equazioni cardinali determina il moto del sistema
mentre le restanti equazioni servono a determinare il momento e la risultante delle forze
vincolari.
2.2 Deduzione delle equazioni cardinali dall’equazione simbolica
La sufficienza delle equazioni cardinale per la determinazione del moto di un sistema
rigido è immediata conseguenza dell’equivalenza di queste equazioni con l’equazione
simbolica della dinamica. Consideriamo prima il caso di un rigido “libero”, ovvero di
un sistema rigido a cui non siano stati imposti altri vincoli. Ricordiamo l’equazione
simobolica
N
X
(mi ai − Fi ) · δPi = 0
(31)
i=1
e l’espressione dello spostamento virtuale
δPi = δP0 + δΩ ∧ (Pi − P0 ) ,
(32)
dove P0 è il centro di massa del sistema e δP0 e δΩ sono vettori arbitrari. Sostituendo
(32) nella (31) otteniamo
N
X
(mi ai − Fi ) · δP0 +
i=1
N
X
(mi ai − Fi ) · (δΩ ∧ (Pi − P0 )) = 0
(33)
i=1
Per l’arbitrarietà dei vettori δP0 e δΩ, entrambe le somme devono essere nulle.
Dal primo addendo otteniamo immediatamente la prima equazione cardinale, mentre per ottenere la seconda cardinale basta scambiare i termini del prodotto misto
(mi ai − Fi ) · (δΩ ∧ (Pi − P0 )) = δΩ · (Pi − P0 ) ∧ (mi ai − Fi ) = 0 .
3
Calcolo delle quantità meccanica per un sistema rigido
Calcoliamo ora il momento angolare L(O) per un sistema rigido,
L(O) =
N
X
i=1
mi (Pi − O) ∧ v(O) +
N
X
mi (Pi − O) ∧ (ω ∧ (Pi − O)) .
(34)
i=1
Il primo addendo di (34) può sempre essere reso nullo con un opportuna scelta dl
punto O: si può prendere per O il punto fisso se il rigido sta compindo un moto di
10
precessione (cioè un moto con almeno un punto fisso), oppure scegliere O = PO che
annula il contributo della somma in quasiasi tipo di moto.
Il secondo termine della somma è una funzione lineare delle componenti della
velocità angolare ω, quindi potrà essere rappresentato in un sistema di riferimento
(ortonormale) centrato in O tramite il prodotto σ(O)ω, dove σ(O) è una opportuna
matrice. Per calcolarla torniamo alla rappresentazione matriciale del prodotto vettore
ω ∧ (Pi − O), questa volta però trasformando in matrice il vettore Pi − O. Otteniamo
N
X
0
mi zi
i=1
−yi
N
X
mi (Pi − O) ∧ (ω ∧ (Pi − O)) =
i=1
−zi
0
xi
yi
0
−xi −zi
0
yi
zi
0
−xi
−yi
ω1
xi ω2
0
ω3
(35)
(nel secondo prodotto abbiamo scambiato i fattori e di conseguenza cambiato segno
alla matrice), dove (xi , yi , zi )T sono le coordinate di Pi e (ω1 , ω2 , ω3 ) le componenti
di ω nel sistema di riferimento.
Svolgendo prodotto delle due matrici in (35), moltipliando per mi e sommando,
otteniamo infine l’espressione cercata per la matrice
N
N
N
X
X
X
2
2
mi (yi + zi )
−mi xi yi
−mi xi zi
i=1
i=1
i=1
N
N
N
X
X
X
σ(O) =
(36)
−mi xi yi
mi (zi2 + x2i )
−mi yi zi
i=1
i=1
i=1
X
N
N
N
X
X
−mi xi zi
−mi yi zi
mi (x2i + yi2 )
i=1
i=1
i=1
Possiamo ora riscrivere le equazioni di moto usando l’espressione della derivata di
L(O) tramite la matrice σ(O),
L̇(O) = σ(O)ω̇ + ω ∧ σ(O)ω
(37)
che abbiamo calcolato utilizzando la formula di Poisson (conviene in effetti esprimere
le quantità che entrano nella matrice σ(O) sempre in un sistema solidale, dove sono
costanti). Possiamo quindi scrivere la seconda equazione cardinale come
σ(O)ω̇ + ω ∧ σ(O)ω = ME (O)
4
(38)
Significato dei termini di σ
La matrice σ(O) è detta tensore di inerzia. Poiché σ(O) è una matrice simmetrica,
esiste un sistema di riferimento ortogonale in cui la matrice è diagonale; gli assi di
questo sistema sono detti assi principali di inerzia. Per indagare sul significato meccanico degli assi principali e dei termini extra diagonali presenti in σ(O) quando la
si riferisca a un sistema diverso da quelli degli assi principali, prendiamo in considerazioni alcuni moti rigidi particolari.
11
4.1 Rotazioni
Consideriamo un moto di rotazione attorno ad un asse fisso. Prendiamo O appartenente all’asse di rotazione in modo da poter applicare la forma ridotta della seconda
equazione cardinale sviluppata nella sezione precedente.
Un moto di rotazione è un moto rigido con ulteriori vincoli rispetto ai vincoli di
rigidità. Matematicamente questi vincoli possono essere espressi, p.e., fissando le tre
coordinate di due dei punti solidali apparteneti entrambi all’asse di rotazione. In questo
modo si sono però imposti solo 5 nuovi vincoli, in quanto le coordinate dei due punti
erano già legate tra loro dal vincolo di rigidità. Quindi un rigido che compie un moto
di rotazione ha un solo grado di libertà. Nella formula che ci fornisce gli spostamenti
virtuali abbiamo δO = 0 e δΩ = δϕ k, dove δϕ è un numero arbitrario e k è il versore
dell’asse di rotazione:
δP = δϕ k ∧ (Pi − O) .
(39)
Inserendo (39) nella definizione di lavoro virtuale delle reazioni, otteniamo la caratterizzazione di una rotazioni “liscia” (ovvero dove i vincoli che costringono il rigido a
girare sull’asse di rotazione “non si oppongono al moto di rotazione stesso”):
ÃN
!
N
X
X
Ri · δϕ k ∧ (Pi − O) =
(Pi − O) ∧ Ri · k δϕ = 0
(40)
i=1
i=1
Poiché
PN sappiamo già che i vincoli di rigidità danno contributo nullo alla somma
i=1 (Pi − O) ∧ Ri , le rotazioni senza attrito sono carattrizzate dal fatto che le reazioni
vincolari hanno momento risultante, calcolato rispetto a un qualsiasi punto dell’asse,
che ha componente nulla lungo l’asse di rotazione.
Supponaimo ora che il moto del sistema sia di rotazione con velocità angolare ϕ̇ k.
La seconda equazione cardinale diventa:
ϕ̈ σ(O)k + ϕ̇2 k ∧ σ(O)k = ME (O)
(41)
che possiamo proiettare sui tre assi di un riferimento solidali (con l’asse delle z coincidente con quello di rotazione)
I23 ϕ̇2
−I13 ϕ̇2
I33 ϕ̈
= ME (O) · i
= ME (O) · j
= ME (O) · k
(42)
(43)
(44)
La (44) ha la stessa struttura dell’equazione di Newton per un punto materiale, dove ora
al posto della massa del punto compare l’elemento I33 della matrice. Questi elementi
diagonali sono detti momenti di inerzia in quanto misurano l’inerzia che un corpo rigido
presenta alle variazioni della velocità angolare in rotazioni attorno al relativo asse.
Ovviamente il fatto che l’asse di rotazione sia anche un asse coordinato non deve avere
rilevanza meccanica: se avessimo scelto come asse di rotazione un altro qualsiasi asse
uscente da O, di versore u, avremmo ottenuto per l’angolo di rotazione ϕ l’equazione
Iu ϕ̈ = ME (O) · u
12
dove la quantità Iu , detta momento di inerzia rispetto all’asse è data da
Iu = u · σ(O)u ,
(45)
e è uguale a
Iu =
N
X
mi d2i
i=1
dove di è la distanza del punto Pi dalla retta passante per O e diretta come u.
L’equazione (44) è sufficiente per determinare il moto, una volta nota la sola componente ME (O) · k del momento delle forze esterne lungo l’asse di moto. Se i vincoli
sono lisci, la componente del momento lungo l’asse è univocamente determinata dalla
forze direttamente applicate, e quindi coincide con l’equazione di Lagrange per la coordinata lagrangiana ϕ, ed è quindi sufficiente per la determinazione completa del moto.
Nelle equazioni (42) e (43) quindi il primo membro è, una volta integrata l’equazione
di moto, un ternime noto, al pari del contributo delle forze esterne al momento ME (O).
Quindi le due equazioni possono essere usate per determinare il momento delle reazioni
vincolari.
Nel caso che l’asse di rotazione sia un asse principale di inerzia, ovvero si abbia
σ(O)k = λk, i primi membri delle (42) e (43) si annullano (I13 = I23 = 0), e
le equazioni si riducono a dire che le rezioni vincolari devono fornire un momento
avente componente nel piano ortogonale all’asse di moto opposta a quella delle forze
direttamente applicate.
In particolare, queste equazioni ci dicono che se il momento delle forze esterne (sia
direttamente applicate che le reazioni vincolari) è nullo (in questo caso diremo che il
moto è una precessione per inerzia) è possibile avere un moto di rotazione se e solo se
l’asse di rotazione è un asse principale di inerzia.
13