Capitolo 4
Sistemi meccanici a un grado
di libertà
4.1
Generalità e condizioni di equilibrio
L’integrazione delle equazioni del moto di un sistema meccanico costituisce un
problema la cui complessità è condizionata da due fattori: il grado di libertà, che
determina il rango del sistema di equazioni differenziali che ne definisce il modello
matematico; l’espressione analitica delle forze, che determina la forma specifica
che assumono le equazioni del moto.
In questo Capitolo intraprendiamo lo studio dei sistemi integrabili a partire da
quelli più semplici, i sistemi a un solo grado di libertà, il cui prototipo è rappresentato da un punto materiale di massa m vincolato a muoversi su una curva regolare
di equazione parametrica x = ξ(s). L’equazione del moto assume la forma
ms̈ = f (t, s, ṡ)
(4.1.1)
e la completa deteminazione del sistema richiede dunque semplicemente l’assegnazione della funzione scalare f . Salvo avviso contrario assumeremo che l’insieme
di definizione di tale funzione sia un prodotto cartesiano della forma I × J × R,
con I e J intervalli di R, e che la f sia di classe C ∞ in tale insieme.
Una prima proprietà dei sistemi a un grado di libertà scaturisce da una semplice
applicazione del Teorema 3.7.1.
Teorema 4.1.1
Condizione necessaria e sufficiente affinché un punto in moto su una curva regolare
sia in quiete nella configurazione di ascissa curvilinea s∗ è che risulti
f (t, s∗ , 0) = 0,
127
∀t.
128
Quando la forza f non dipende esplicitamente dal tempo l’equazione (4.1.1)
assume la forma autonoma
ms̈ = f (s, ṡ)
(4.1.2)
che equivale al sistema del primo ordine
ṡ = v,
mv̇ = f (s, v).
(4.1.3)
Lo studio di un sistema meccanico autonomo a un grado di libertà si riconduce
cosı̀ a quello si un sistema dinamico il cui spazio delle fasi è contenuto in R2 ed il
cui campo vettoriale è definito dalla corrispondenza (s, v) 7→ (v, f (s, v)).
Sovente, la risultante delle forze attive agenti su una particella è la somma di
più forze che descrivono diverse interazioni con l’ambiente. Tra queste, particolare
interesse rivestono le forze posizionali. In tal caso risulta
f (ξ(s)) · t(s) = f (s)
e pertanto la componente tangenziale della forza è funzione della posizione della
particella sulla traiettoria, individuata dall’ascissa curvilinea s.
Se, in particolare, la forza attiva è conservativa, la restrizione dell’energia potenziale ai punti della curva è una primitiva della componente tangenziale della
forza cambiata di segno. Si ha infatti
U 0 (s) = ∇U (ξ(s)) ·
dξ
= −f (ξ(s)) · t(s) = −f (s).
ds
D’altra parte, anche quando la forza attiva, pur posizionale, non risulta conservativa, è sempre possibile determinare una funzione U di classe C ∞ in J tale che si
abbia
U 0 (s) = −f (s)
(4.1.4)
identicamente in J; a tal fine è sufficiente identificare U con una qualsiasi primitiva
di f cambiata di segno
Z s
U (s) = −
f (ξ) dξ
(4.1.5)
a
(a, s ∈ J). L’equazione del moto prende allora la forma
ms̈ = −U 0 (s)
(4.1.6)
mentre il sistema del primo ordine ad essa equivalente diviene
ṡ = v,
mv̇ = −U 0 (s).
(4.1.7)
129
La funzione U (s) definita dalla (4.1.5) svolge il ruolo di energia potenziale per
la particella. Se definiamo infatti l’energia meccanica totale con la posizione
Z s
1
E(s, v) = T (v) + U (s) = mv 2 −
f (ξ) dξ,
(4.1.8)
2
a
siamo in condizione di mostrare il seguente
Teorema 4.1.2
L’energia meccanica totale di una particella in moto su una curva assegnata sotto l’azione di una forza posizionale è costante durante ogni suo moto. Se sulla
particella agisce anche una forza attiva dissipativa allora l’energia totale è non
crescente durante i moti.
Dimostrazione - Moltiplicando ambo i membri dell’equazione (4.1.6) per ṡ, si
ottiene
ms̈ṡ = −U 0 (s)ṡ.
Il primo membro è la derivata temporale dell’energia cinetica della particella; il
secondo membro è invece l’opposto della derivata rispetto al tempo della funzione
U . Si ha dunque
Ė = Ṫ + U̇ = mṡs̈ + U 0 ṡ = 0
e pertanto l’energia rimane costante durante il moto.
Consideriamo adesso il caso che sulla particella agisca anche una forza f
dissipativa; la condizione di dissipatività si esprime nella relazione
f (t, ξ(s), ṡt(s)) · (ṡt) = f (t, s, ṡ)ṡ ≤ 0.
La seconda parte del Teorema segue allora da questa condizione moltiplicando
l’equazione del moto
ms̈ = −U 0 (s) + f (t, s, ṡ)
(4.1.9)
per ṡ.
L’interpretazione di U come energia potenziale per un punto in moto su una
curva è ulteriormente confermata dal ruolo che tale funzione gioca nella ricerca
delle configurazioni di equilibrio e nello studio della loro stabilità.
Teorema 4.1.3
Sia p un punto in moto su una curva sotto l’azione di una forza posizionale e di
una forza dissipativa. Le configurazioni di quiete di p sono i punti le cui ascisse
curvilinee individuano i valori stazionari dell’energia potenziale. Se U possiede un
minimo stretto in s∗ , allora ξ(s∗ ) è una configurazione di equilibrio stabile.
Dimostrazione - Il moto di p è governato dall’equazione (4.1.9) e le configurazioni
di equilibrio sono dunque le soluzioni dell’equazione
−U 0 (s) + f (t, s, 0) = 0.
130
f
E
s
s
Figura 4.1.1: una forza di richiamo e la sua energia potenziale.
Posto a(t, s, v) = f (t, s, v)v, risulta
a(t, s, v) ≤ 0
e
a(t, s, 0) = 0
cosicché a è massima in (t, s, 0) per ogni t e per ogni s. In particolare, la derivata
∂a
∂f
(t, s, v) =
(t, s, v)v + f (t, s, v)
∂v
∂v
deve annullarsi per v = 0 e pertanto risulta f (t, s, 0) = 0 e la condizione di
equilibrio si riduce a U 0 (s) = 0: ciò prova che le configurazioni di equilibrio sono
tutti e soli i punti stazionari di U . Supponiamo ora che U abbia un minimo
stretto in s∗ . Allora s∗ individua una posizione di equilibrio e l’energia E(s, v) è
una funzione di Liapunov, poiché ha un minimo stretto in (s∗ , 0) ed è non crescente
lungo i moti di p. In definitiva s∗ è stabile.
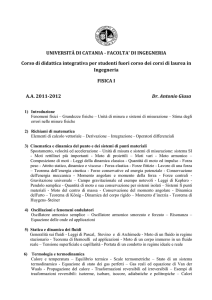
Una classe di forze posizionali che si presenta frequentemente è quella costituita
dalle forze di richiamo. Con tale termine si designano quelle forze che hanno
la caratteristica di annullarsi in un certo punto, il centro di richiamo, di avere
intensità tanto più grande quanto più ci si allontana da tale punto e di essere
sempre dirette verso di esso. È questo il comportamento caratteristico della forza
che si esercita su un punto che sia collegato all’estremo mobile di una molla il cui
secondo estremo sia fissato ad una parete. In figura 4.1.1 sono disegnati i tipici
andamenti di una forza di richiamo e della sua energia potenziale.
Il centro di richiamo è, per definizione, una posizione di equilibrio. Si tratta,
anzi, di una configurazione di equilibrio stabile, in quanto l’energia potenziale vi
risulta minima.
Il caso più elementare di forza di richiamo si realizza quando la forza ha intensità direttamente proporzionale allo spostamento dal centro di richiamo. Fissando
in tale punto l’origine delle ascisse curvilinee, la legge di forza si scrive allora
f (s) = −ks.
(4.1.10)
131
La (4.1.10) è la legge di Hooke; una forza che obbedisce a tale legge si denomina forza elastica e la costante di proporzionalità positiva k che vi figura si dice
costante elastica. L’energia potenziale di tale forza è
U (s) =
1 2
ks .
2
(4.1.11)
• Osservazione 4.1.1
Consideriamo una generica forza di richiamo e, posta l’origine delle ascisse curvilinee nel centro di richiamo, scriviamo la formula di Taylor di punto iniziale 0;
ricordando che risulta f (0) = 0, abbiamo
1
f (s) = f 0 (0)s + f 00 (s0 )s2
2
con s0 interno all’intervallo di estremi 0 e s. La legge di Hooke scaturisce da
questa relazione identificando la costante elastica con −f 0 (0), purché questa non
si annulli, e trascurando i termini di ordine superiore al primo. Se ne conclude che
ogni forza di richiamo tale che f 0 (0) 6= 0 è esprimibile mediante la legge di Hooke
almeno per piccoli spostamenti dalla configurazione di equilibrio.
Un altro caso notevole è quello corrispondente alle forze la cui componente
tangenziale dipende esclusivamente dalla velocità. Tali forze si esprimono attraverso una legge di forza della forma −f (v), con f funzione di classe C ∞ in R, e
l’equazione del moto diventa
ms̈ = −f (ṡ).
(4.1.12)
Questa equazione equivale al sistema
ṡ = v,
mv̇ = −f (v).
(4.1.13)
Se la forza ha segno sempre opposto a quello della velocità, essa viene allora
designata con il nome di resistenza passiva.
Ogni resistenza passiva è dissipativa; infatti, la circostanza che la forza abbia
segno contrario a quello della velocità si traduce nella relazione
−f (v)v ≤ 0,
∀v 6= 0.
In particolare, f deve cambiare segno per v = 0 e dunque, per continuità, deve
verificare la condizione
f (0) = 0.
L’espressione più elementare di una resistenza passiva è fornita dalla relazione
f (v) = hv
(4.1.14)
132
con h costante positiva. Una forza descritta dalla legge (4.1.14) si denomina resistenza viscosa poiché rappresenta la tipica espressione della resistenza che un
fluido oppone ai moti lenti di un corpo immerso in esso. Ripetendo i ragionamenti dell’Osservazione 4.1.1 si può affermare che la (4.1.14) è la legge di forza che
descrive una generica resistenza passiva per piccoli valori della velocità.
Per velocità più elevate la legge (4.1.14) va sostituita con quella
f (v) = ±hv 2
(4.1.15)
nella quale deve assumersi lo stesso segno di v. La (4.1.15) è la legge di forza di
una resistenza idraulica.
Per velocità assai elevate, quali quelle che ad esempio si considerano nei problemi di balistica, anche la legge (4.1.15) cessa di valere e bisogna allora determinare
l’espressione della reazione f sulla base di specifiche esperienze.
4.2
Oscillazioni lineari libere e forzate
In questa sezione affrontiamo lo studio dei moti rettilinei di un punto soggetto a
una forza di richiamo e ad una resistenza passiva in tutti i casi in cui l’equazione
differenziale del moto è lineare. Ciò equivale a richiedere che la forza di richiamo
sia elastica e la resistenza passiva sia di tipo viscoso.
L’equazione del moto per un tale sistema è allora
mẍ = −kx − hẋ
(4.2.1)
nella quale il ruolo dell’ascissa curvilinea s è giocato dall’ordinaria ascissa x misurata sulla retta su cui avviene il moto a partire dal centro di richiamo della forza
elastica.
L’equazione (4.2.1) conserva il suo carattere lineare quando, accanto alla forza
elastica e alla resistenza viscosa, si assuma presente un’ulteriore forza dipendente
esclusivamente dal tempo con legge assegnata g(t), nel qual caso l’equazione del
moto diviene
mẍ = −kx − hẋ + g(t).
(4.2.2)
I moti governati dall’equazione (4.2.2) si denominano, genericamente, moti lineari;
in particolare, si suole parlare di moti lineari liberi o di moti lineari forzati a
seconda che sia g(t) = 0 oppure g(t) 6= 0.
Al fine di liberarci di costanti inessenziali, dividiamo ambo i membri della
(4.2.2) per la massa m, ottenendo cosı̀
ẍ + 2β ẋ + ω 2 x = γ(t)
con
r
k
g(t)
h
,
ω=
,
γ(t) =
.
β=
2m
m
m
Analizziamo di seguito prima i moti liberi poi quelli forzati.
(4.2.3)
133
4.2.1
Moti armonici
La prima situazione che prendiamo in esame è quella dei moti liberi in presenza della sola forza elastica. L’equazione differenziale che descrive tali moti si determina
ponendo β = 0 e γ(t) = 0 nella (4.2.3):
ẍ + ω 2 x = 0.
(4.2.4)
L’integrazione di questa equazione è ricondotta alla soluzione dell’equazione
caratteristica
λ2 + ω 2 = 0
la quale possiede le due soluzioni immaginarie ±iω. L’integrale generale della
(4.2.4) è dato allora da
x(t) = R cos(ωt + ϕ).
(4.2.5)
La (4.2.4) e la (4.2.5) si denominano, rispettivamente, equazione differenziale e
legge oraria dei moti armonici. Per tale ragione, un punto soggetto alla sola forza
di richiamo elastica si denomina oscillatore armonico. La costante
r
k
(4.2.6)
ω=
m
è detta pulsazione, e dipende solo dai parametri strutturali del sistema, mentre le
due costanti R e ϕ prendono il nome di ampiezza e fase del moto armonico e vanno
determinate in base ai dati iniziali. In particolare, imponendo che nell’origine dei
tempi la (4.2.5) assuma il valore x0 e la sua derivata prima
ẋ(t) = −ωR sin(ωt + ϕ)
assuma il valore v0 , si ottengono le seguenti determinazioni di R e ϕ:
r
r
v0
v02
2E
2
R = s0 + 2 =
,
tan ϕ = −
.
ω
k
ωs0
(4.2.7)
Un punto animato di moto armonico oscilla periodicamente volte tra le configurazioni di ascissa R e −R. Il periodo delle oscillazione è
r
2π
m
T =
= 2π
;
(4.2.8)
ω
k
esso non dipende dai dati iniziali del problema e, dunque, dall’ampiezza del moto.
Questa proprietà delle oscillazioni armoniche viene detta isocronismo.
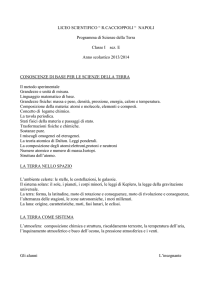
La figura 4.2.1 mostra il grafico della legge oraria di tre moti armonici aventi
in comune la posizione iniziale e che differiscono tra di loro per la velocità iniziale
della particella.
134
x
t
Figura 4.2.1: moti armonici.
4.2.2
Moti smorzati
Passiamo adesso allo studio dei moti lineari liberi di un punto sottoposto a una
forza elastica e a una resistenza viscosa. L’equazione differenziale del moto di tale
sistema è dunque
ẍ + 2β ẋ + ω 2 x = 0
(4.2.9)
con β costante strettamente positiva. Il polinomio caratteristico dell’equazione
(4.2.9) è
λ2 + 2βλ + ω 2 = 0.
Esso possiede due soluzioni complesse coniugate, una soluzione reale doppia ovvero
due soluzioni reali distinte a seconda che sia β < ω, β = ω e β > ω. Ricordando le
definizioni di β ed ω, possiamo affermare che la prima situazione si presenta quando
la forza elastica predomina sulla resistenza passiva, l’ultima se la resistenza passiva
è grande in rapporto alla forza elastica e la seconda rappresenta una situazione
critica intermedia fra le altre. Analizziamo uno per uno i tre casi.
• Il caso β < ω
L’equazione caratteristica ammette le due radici complesse coniugate
p
p
λ1 = −β − i ω 2 − β 2 ,
λ2 = −β + i ω 2 − β 2 .
Posto
ω̄ =
p
ω2 − β 2 ,
l’equazione finita del moto assume la forma
x(t) = Re−βt cos(ω̄t + ϕ).
(4.2.10)
135
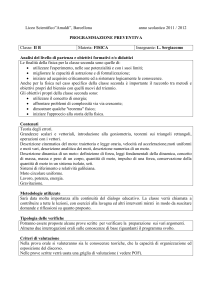
x
t
Figura 4.2.2: moto oscillatorio smorzato.
Il tipico grafico di una tale legge oraria è illustrato in figura 4.2.2.
Il moto descritto dalla legge oraria (4.2.2) conserva il carattere oscillatorio
del moto armonico: infatti, la particella ripassa per il centro di richiamo della
forza elastica infinite volte, in corrispondenza alle infinite soluzioni dell’equazione
x(t) = 0. La durata delle oscillazioni vale
T̄ =
2π
ω̄
e non varia nel tempo. Essa è sempre maggiore del periodo T che competerebbe
al sistema in assenza della resistenza passiva e se ne discosta tanto più quanto più
cresce la resistenza.
Il moto non è periodico, poiché l’ampiezza delle oscillazioni decade nel tempo.
Infatti, gli istanti di massima distanza dal centro di richiamo, in ogni singola
semioscillazione, coincidono con gli istanti di arresto della particella i quali, a loro
volta, si determinano annullando la velocità
ẋ(t) = −Re−βt [β cos(ω̄t + ϕ) − ω sin(ω̄t + ϕ)]
e sono pertanto le soluzioni dell’equazione algebrica
β
tan(ω̄t + ϕ) = − .
ω̄
Esse costituiscono una progressione aritmetica di ragione π/ω̄. In ogni semioscillazione l’ampiezza decade di un fattore e−βπ/ω̄ .
Sulla base delle precedenti considerazioni risulta giustificata la denominazione
di moti oscillatori smorzati con cui si designano i moti di legge oraria (4.2.10). In
particolare, quando β ' 0 essi sono detti debolmente smorzati. In quest’ultimo
caso la durata delle oscillazioni è molto prossima a quella dei moti armonici ed
136
inoltre, per intervalli di tempo contenenti un piccolo numero di periodi, il moto è
approssimativamente armonico, poiché l’ampiezza decade di un fattore assai piccolo. Al contrario, al crescere di β la durata delle oscillazioni diviene molto grande
e, al tempo stesso, cresce il fattore di decadimento dell’ampiezza in ogni singola
oscillazione; di fatto, dopo un certo numero di oscillazioni l’ampiezza diviene tanto
piccola che le oscillazioni cessano di essere concretamente rivelabili.
Concludiamo osservando che, in ogni caso, i moti oscillatori smorzati verificano
la condizione asintotica
lim x(t) = 0.
(4.2.11)
t→+∞
• Il caso β = ω
L’equazione caratteristica ammette la sola soluzione reale λ = −β e la soluzione
della (4.2.9) si esprime nella forma
x(t) = (C1 + C2 t)e−βt .
(4.2.12)
Anche questa legge oraria verifica la condizione asintotica (4.2.11) per ogni scelta
dei dati iniziali. A differenza però del caso precedente, il comportamento oscillatorio caratteristico del moto armonico è del tutto cancellato dalla resistenza.
Infatti, l’equazione x(t) = 0 possiede un’unica soluzione che può eventualmente
essere negativa. Pertanto la particella, dopo l’istante iniziale, attraversa il centro
di richiamo al più una volta. Il moto di equazione (4.2.12) è detto criticamente
smorzato.
• Il caso β > ω
L’equazione caratteristica ammette le due radici reali distinte
−λ1 = −β −
p
β 2 − ω2 ,
−λ2 = −β +
p
β 2 − ω2
entrambe negative. La soluzione della (4.2.9) si esprime nella forma
x(t) = C1 e−λ1 t + C2 e−λ2 t ,
(4.2.13)
con C1 e C2 costanti da determinarsi in base ai dati iniziali. In ogni caso, la
(4.2.13) verifica la condizione asintotica (4.2.11).
I moti di legge oraria (4.2.13) sono detti moti sovrasmorzati. Per determinarne le caratteristiche salienti osserviamo che l’equazione x(t) = 0 o non possiede
soluzioni o ne possiede una sola, che può anche non essere positiva. Sintetizzando,
possiamo affermare che, dopo l’istante iniziale, il punto passa al più una volta
per il centro di richiamo della forza elastica. Il grafico della legge oraria del moto
sovrasmorzato è illustrato in figura 4.2.3 in tre casi che corrispondono a una stessa
posizione iniziale ma che differiscono per il verso e l’intensità della velocità iniziale.
137
x
t
Figura 4.2.3: esempi di moti sovrasmorzati.
4.2.3
Moti forzati in assenza di resistenza
Occupiamoci adesso delle oscillazioni forzate, cominciando dall’oscillatore armonico. L’equazione del moto è
ẍ + ω 2 x = γ(t).
(4.2.14)
Grande interesse riveste il caso in cui la funzione γ è periodica e che, esprimendo
tale funzione in serie di Fourier, può sempre essere ricondotto allo studio del caso
particolare in cui risulta
γ(t) = a sin ω 0 t
cosı̀ che l’equazione differenziale del moto prende la forma
ẍ + ω 2 x = a sin ω 0 t.
(4.2.15)
È agevole verificare che quando la pulsazione ω dei moti liberi e quella ω 0
che caratterizza la forza non coincidono una soluzione particolare dell’equazione
(4.2.15) è data da
a
sin ω 0 t,
ω 2 − ω 02
di modo che l’integrale completo si esprime nella forma
x(t) = R cos(ωt + ϕ) +
ω2
a
sin ω 0 t,
− ω 02
(4.2.16)
La (4.2.16) è la sovrapposizione di due moti armonici di differente pulsazione; allo
scopo di individuare le caratteristiche di un tale moto, è utile porne la legge oraria
in una forma più espressiva introducendo le due costanti
ω1 =
ω + ω0
,
2
ω2 =
ω − ω0
,
2
138
dette, rispettivamente, pulsazione media e pulsazione di modulazione. Invertendo
queste due relazioni si ottiene
ω 0 = ω1 − ω2 ,
ω = ω1 + ω2 .
Dalle formule di addizione del seno e del coseno segue poi
cos(ωt + ϕ) = cos ω1 t cos(ϕ + ω2 t) − sin ω1 t sin(ϕ + ω2 t),
sin ω 0 t = sin ω1 t cos ω2 t − cos ω1 t sin ω2 t.
Denotiamo per semplicità con R0 l’ampiezza a/(ω 2 − ω 02 ) della soluzione particolare. Se si definiscono due funzioni A(t) e ψ(t) tali che
A(t) cos ψ(t) = R cos(ϕ + ω2 t) − R0 sin ω2 t,
(4.2.17)
x(t) = A(t) cos(ω1 t + ψ(t)).
(4.2.18)
A(t) sin ψ(t) = R sin(ϕ + ω2 t) − R0 cos ω2 t,
la (4.2.16) si scrive
Questa relazione, formalmente simile all’equazione finita di un moto armonico,
ne differisce sostanzialmente poiché l’ampiezza e la fase dipendono dal tempo. In
particolare, la prima si determina quadrando e sommando le (4.2.17) e vale
p
A(t) = R2 + R02 − 2RR0 sin(2ω2 t + ϕ).
Essa oscilla pertanto tra il valore massimo R + R0 e quello minimo |R − R0 |; il
tempo che intercorre tra due massimi consecutivi vale
T2 =
π
|ω2 |
e si denomina battimento. Questo andamento oscillatorio di A si denomina modulazione d’ampiezza ed è tanto più marcato quanto più prossimi sono i valori R e
R0 , poiché in tal caso il minimo di A(t) diviene vicino a zero.
È interessante analizzare il caso particolare in cui le pulsazioni ω ed ω 0 sono
tra loro prossime. In tale situazione si ha |ω2 | ω1 ; posto allora
T1 =
2π
,
ω1
(4.2.19)
risulta T1 T2 . Ne consegue che, per intervalli di tempo grandi rispetto a T1 ma
piccoli rispetto a T2 , i valori di A e ϕ non si modificano in maniera sostanziale
ed il moto x(t) di equazione è approssimativamente periodico; per tale motivo
la sovrapposizione di due moti armonici di ampiezze e pulsazioni prossime, si
denomina moto quasi-armonico.
In figura 4.2.4 è rappresentato il grafico della funzione (4.2.16) per due diverse
scelte dei parametri; in particolare, il secondo disegno esemplifica quella situazione
che abbiamo definito quasi-armonica.
139
x
t
x
t
Figura 4.2.4: composizione di due moti armonici.
140
• Osservazione 4.2.1
La situazione appena descritta presenta un importante analogo acustico nel fenomeno dei battimenti che si verifica quando si eccitano, allo stesso istante e con la
stessa intensità, due diapason; se le note che questi emettono sono sufficientemente
separate, vengono distintamente percepite dall’orecchio umano cosı̀ da formare un
semplice accordo. Se però i diapason emettono suoni di frequenze molto prossime,
allora, al di sotto di una certa soglia, l’orecchio percepisce un singolo suono leggermente diverso da quello emesso da un solo diapason e la cui intensità è modulata
nel tempo.
Nel commentare il moto (4.2.16), occorre ancora osservare che, fissati i dati iniziali — e dunque le costanti R e ϕ — l’ampiezza R0 dell’integrale particolare cresce
quanto più la pulsazione della forza esterna ω 0 approssima quella ω caratteristica
dell’oscillatore. Il secondo termine diviene allora predominante rispetto al primo
ed il moto risultante è approssimativamente armonico, con pulsazione intermedia
fra i due valori prossimi ω ed ω 0 ed ampiezza debolmente modulata attorno al
valor medio della funzione A(t).
Rimane infine da analizzare il caso in cui la forza esterna varia con la medesima
pulsazione ω dell’oscillatore libero. Quando si verifica tale circostanza allora la
soluzione particolare dell’equazione (4.2.15) si esprime nella forma
a
− t cos ωt,
2ω
e quindi la soluzione completa è
x(t) = R cos(ωt + ϕ) −
at
cos ωt.
2ω
(4.2.20)
La (4.2.20) si interpreta come sovrapposizione di un moto armonico con uno oscillatorio di pulsazione ω ed ampiezza linearmente crescente nel tempo e che pertanto
diviene predominante sul primo. Il fenomeno appena descritto prende il nome di
risonanza per un oscillatore armonico.
4.2.4
Moti forzati in presenza di resistenza
Per completare l’analisi dei sistemi lineari rimane da studiare il caso di un punto
su cui agiscono una forza elastica di richiamo, una resistenza passiva viscosa e una
forza dipendente dal tempo. Il moto di un tale sistema è governato dall’equazione
differenziale
ẍ + 2β ẋ + ω 2 x = γ(t).
Anche stavolta ci occuperemo della situazione particolare ma rilevante di una forza
γ di tipo sinusoidale, nel qual caso la precedente equazione diventa
ẍ + 2β ẋ + ω 2 x = a sin ω 0 t.
(4.2.21)
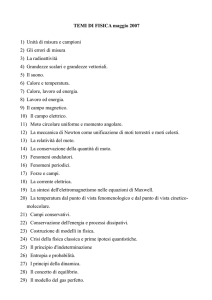
141
R
β=0
β = 0.1ω
β = 0.2ω
ω′
ω
Figura 4.2.5: curve di risonanza.
Una soluzione particolare della (4.2.21) è data dalla funzione
a sin(ω 0 t − ψ)
x(t) = p
(ω 2 − ω 02 )2 + 4β 2 ω 02
(4.2.22)
dove la costante di fase ψ è determinata dalla condizione
tan ψ =
2βω 0
.
ω 2 − ω 02
L’integrale completo della (4.2.21) si determina sommando la (4.2.22) con
l’equazione dei moti smorzati. Poiché questi tendono in ogni caso a zero al crescere
di t, si può affermare che, dopo una fase iniziale, detta transiente, in cui il contributo del moto smorzato può essere concorrenziale rispetto a quello del termine
(4.2.22), si perviene ad una situazione, detta di regime nella quale la soluzione
particolare caratterizza da sola il moto del sistema.
In definitiva, i moti forzati di un sistema lineare, per effetto di una forza di
andamento sinusoidale, sono a regime delle oscillazioni armoniche di pulsazione ω 0
pari a quelle della forza esterna ma sfasate rispetto ad essa. L’ampiezza
R= p
a
(ω 2
−
ω 02 )2
+ 4β 2 ω 02
di tali oscillazioni è una funzione della pulsazione ω 0 con cui oscilla la forza e
dipende dai parametri strutturali ω e β del sistema libero. In particolare, R
assume il proprio massimo quando
p
ω 0 = ω 2 − 2β 2 .
142
Nel caso dell’oscillatore debolmente smorzato, che corrisponde ai valori di β prossimi a zero, tale massimo è molto prossimo ad ω e risulta assai stretto attorno a tale
valore. In altri termini l’ampiezza delle oscillazioni risulta fortemente amplificata
in un piccolo intorno di ω; tale fenomeno è designato col nome di risonanza. Più
in generale, il grafico della funzione che esprime R in termini di ω 0 si chiama curva
di risonanza. Quando β cresce, il massimo della curva di risonanza si allontana
da ω e risulta sempre più appiattito. In figura 4.2.5 sono mostrate le curve di
risonanza corrispondenti al caso limite β = 0 e a due valori positivi di β. La curva
tratteggiata identifica il luogo dei massimi delle curve di risonanza al variare del
parametro β.
4.3
Integrazione dei sistemi a un grado di libertà soggetti a forze posizionali
Lo studio del moto di un punto su una traiettoria assegnata fornisce importanti
esempi di integrabilità anche in ambito non lineare. Una classe di sistemi integrabili con una quadratura è costituita dai punti soggetti a una forza posizionale. In
Sezione 4.1 si è già rilevato come per tali sistemi sia sempre possibile individuare
una funzione U che svolge il ruolo di energia potenziale. In particolare, l’equazione
del moto si esprime nella forma
ms̈ = −U 0 (s).
(4.3.1)
Tale equazione va risolta assegnando all’istante t0 i valori s0 e v0 dell’ascissa
curvilinea e della velocità scalare.
In virtù del Teorema 4.1.2, l’energia totale della particella conserva, lungo ogni
moto, il valore
1
E = mv02 + U (s0 )
2
che possiede all’istante iniziale. Si ha cioè
E(s, ṡ) =
1 2
mṡ + U (s) = E.
2
(4.3.2)
identicamente lungo ogni soluzione della (4.3.1).
La (4.3.2) è un’equazione differenziale del primo ordine nella funzione incognita s(t) ed il contenuto del Teorema 4.1.2 può parafrasarsi affermando che ogni
soluzione dell’equazione (4.3.1) è soluzione della (4.3.2) per un opportuno valore di E. Il Teorema che segue chiarisce i limiti di invertibilità della precedente
affermazione.
Teorema 4.3.1
Sia p un punto vincolato a una curva liscia e soggetto a una forza posizionale di
energia potenziale U . Ogni soluzione di classe C 2 dell’equazione (4.3.2) che non
sia costante in alcun intervallo è un moto di p.
143
Dimostrazione - Derivando la (4.3.2) rispetto al tempo si ha
Ė = (ms̈ + U 0 (s))ṡ = 0
e dunque la (4.3.1) è soddisfatta in tutti gli istanti in cui ṡ 6= 0. Sia, allora, t̄
un istante tale che ṡ(t̄) = 0; t̄ non può essere contenuto in un intervallo in cui è
identicamente ṡ(t) = 0 poiché se cosı̀ fosse la soluzione s(t) coinciderebbe, in tale
intervallo, con una soluzione di quiete ed allora, per il Teorema di unicità globale,
dovrebbe ridursi ad essa. Esiste dunque una successione di istanti tn tendente a
t̄ nei quali la velocità ṡ non si annulla. L’equazione del moto è verificata in tutti
gli istanti di tale successione e quindi, in virtù della continuità di tutte le funzioni
coinvolte, anche nell’istante t̄.
• Osservazione 4.3.1
Si consideri il problema di Cauchy per la (4.3.1) con dati iniziali (s0 , 0). Se s0 è una
configurazione di equilibrio la soluzione di tale problema è la funzione s(t) = s0 ; in
caso contrario, la soluzione s(t) non risulta identicamente costante. D’altra parte,
la funzione s(t) = s0 è comunque soluzione della (4.3.2) in corrispondenza al dato
s0 e al valore
E = U (s0 )
anche quando s0 non è una configurazione di equilibrio. La (4.3.2) ammette dunque soluzioni diverse di uno stesso problema di Cauchy: quella costante e quella
corrispondente all’effettivo moto del sistema.
• Osservazione 4.3.2
Siano s1 (t) e s2 (t) i due moti di p corrispondenti ai dati iniziali (s0 , v0 ) e (s0 , −v0 ),
rispettivamente. Tali funzioni, fra loro certamente distinte, sono entrambe soluzioni della (4.3.2) in corrispondenza al medesimo valore
E=
e allo stesso dato iniziale s0 .
1
mv 2 + U (s0 )
2 0
In virtù del Teorema 4.3.1, la determinazione del moto di un sistema posizionale
a un grado di libertà è ricondotta alla risoluzione dell’equazione differenziale del
primo ordine (4.3.2). Questa, peraltro, non appare in forma normale ma può
risolversi rispetto alla derivata ṡ nell’intorno di ogni istante t0 in cui sia ṡ(t0 ) 6= 0.
In tale ipotesi, essa si esprime nella forma
r
2
ṡ = ±
(E − U (s))
(4.3.3)
m
dove il segno va fissato in accordo con quello di ṡ(t0 ). L’equazione (4.3.3) è a
variabili separabili; giova pertanto richiamare il seguente
144
Teorema 4.3.2
Si consideri l’equazione differenziale a variabili separabili
y 0 = f (x)g(y).
(4.3.4)
nella funzione incognita y(x), con f e g funzioni continue negli intervalli aperti Ix
e Iy , rispettivamente. Sia y0 ∈ Iy un punto nel quale risulti verificata la condizione
g(y0 ) 6= 0.
Posto allora
Z
x
F (x) =
Z
f (ξ) dξ
e
y
G(y) =
x0
y0
dη
,
g(η)
esiste un numero positivo a tale che la funzione G è invertibile in [y0 − a, y0 + a]
e la funzione
−1
y(x) = G (F (x))
è in tale intervallo l’unica soluzione dell’equazione (4.3.4) soddisfacente la condizione y(x0 ) = y0 .
Dimostrazione - L’ipotesi g(y0 ) 6= 0 consente di affermare che la funzione G è
definita in un intorno completo di y0 e che inoltre G0 (y0 ) = 1/g(y0 ) 6= 0. Pertanto
G è invertibile in un intervallo [y0 − a, y0 + a] centrato in y0 . Differenziando
l’identità G(y(x)) = F (x) si ha
G0 (y(x))y 0 (x) = F 0 (x).
D’altra parte, ricordando le definizioni di F e di G, si ha
G0 (y) =
1
g(y)
e
F 0 (x) = f (x).
Sostituendo tali espressioni nella precedente identità e moltiplicando ambo i membri per g(y(x)) si ha infine
y 0 (x) = f (x)g(y(x))
e ciò prova che y(x) è soluzione della (4.3.4). Poiché essa verifica evidentemente
il dato y(x0 ) = y0 , non resta che mostrare l’unicità della soluzione. Si supponga allora l’esistenza di una seconda soluzione ȳ(x); avendosi g(ȳ(x0 )) 6= 0 sarà
g(ȳ(x)) 6= 0 in un intorno completo di x0 ed in tale intorno risulterà
ȳ 0 (x)
= f (x)
g(ȳ(x))
e dunque, integrando tra x0 e il generico x ed effettuando il cambio di variabile
s = ȳ(x),
Z x
Z x 0
Z ȳ(x)
ȳ (ξ)
1
f (ξ) dξ =
dξ =
ds,
g(ȳ(ξ))
g(s)
x0
x0
y0
145
ovvero
G(ȳ(x)) = F (x).
−1
Componendo ambo i membri di questa identità con G si ha infine
−1
ȳ(x) = G (F (x)) = y(x).
• Osservazione 4.3.3
Un’equazione differenziale del primo ordine autonoma ha la forma
y 0 = g(y)
ed è dunque a variabili separabili avendosi, in particolare, f = 1. In tale circostanza si ha allora F (x) = x − x0 e la soluzione dell’equazione si ottiene invertendo
l’uguaglianza
x = x0 + G(y)
intorno a (x0 , y0 ).
Teorema 4.3.3
Sia p un punto in moto su una curva γ sotto l’azione di una forza posizionale di
energia potenziale U . Si assegnino all’istante t0 i valori s0 dell’ascissa curvilinea
e v0 della velocità scalare. Allora, nell’ipotesi che sia v0 6= 0, esiste un numero
positivo τ tale che la restrizione della legge oraria s(t) all’intervallo [t0 − τ, t0 + τ ]
si determina invertendo l’applicazione
Z s
dξ
q
(4.3.5)
t = t0 ±
2
s0
(E
−
U
(ξ))
m
con E = 12 mv02 + U (s0 ) e dove il segno va scelto in accordo con quello di v0 .
Dimostrazione - Nelle ipotesi del Teorema, la soluzione del problema di Cauchy
non è costante e dunque il moto può determinarsi come soluzione dell’equazione
(4.3.3). Inoltre, la condizione v0 6= 0 comporta E −U (s0 ) > 0 e pertanto il secondo
membro dell’equazione non si annulla in s0 . L’enunciato segue allora dal Teorema
4.3.2.
• Osservazione 4.3.4
Il Teorema 4.3.3 ha carattere locale, nel senso che si pronuncia sulla rappresentabilità della legge oraria nella forma inversa della (4.3.5) in un intorno dell’istante
iniziale. Di fatto la (4.3.5) è definita almeno per tutti i valori di s appartenenti
146
ad un intervallo (a, b) dove a è la soluzione dell’equazione E − U (s) = 0 più prossima a s0 alla sua sinistra, se essa esiste, ovvero l’estremo inferiore dell’insieme
di definizione dell’energia potenziale U (eventualmente −∞); similmente, b è la
soluzione dell’equazione E − U (s) = 0 più prossima a s0 alla sua destra, se essa
esiste, ovvero l’estremo superiore dell’insieme di definizione dell’energia potenziale
U (eventualmente +∞). Pertanto, invertendo la (4.3.5) in (a, b) si determina la
restrizione della legge oraria s(t) all’intervallo temporale (t0 − τ1 , t0 + τ2 ), dove
Z
τ1 =
a
s0
dξ
q
2
m
Z
,
(E − U (ξ))
b
τ2 =
s0
dξ
q
2
m
.
(E − U (ξ))
Il Teorema 4.3.3 lascia aperto il problema della determinazione del moto quando all’istante iniziale risulta v0 = 0. In tal caso sono possibili due eventualità:
(i) s0 è una configurazione di quiete;
(ii) s0 non è una configurazione di quiete.
Per discriminare tra questi due casi è sufficiente, in virtù del Teorema 4.1.3, verificare se s0 è un punto stazionario dell’energia potenziale. Se la risposta a tale
domanda è affermativa, si verifica il caso (i) e dunque la soluzione del problema
di Cauchy è s(t) = s0 . Allo scopo di determinare la soluzione relativa al caso (ii),
dimostriamo preliminarmente il
Teorema 4.3.4
Sia p un punto in moto su una curva regolare γ sotto l’azione di una forza di
energia potenziale U e si supponga che all’istante t0 risulti v0 = 0. Allora, se la
configurazione s(t0 ) non è di equilibrio, t0 è un istante in cui p inverte il proprio
senso di marcia.
Dimostrazione - Il moto di p in un intorno dell’istante t0 si determina risolvendo
il problema di Cauchy di dati iniziali (s0 , 0) per l’equazione del moto (4.3.1). In
particolare, all’istante iniziale risulta
lim
t→t0
1
ṡ(t)
= − U 0 (s0 ).
t − t0
m
Se s0 non è una configurazione di equilibrio, il secondo membro di quest’ultima
equazione è diverso da 0; pertanto, il rapporto
ṡ(t)
t − t0
deve avere segno determinato in un intorno completo I dell’istante iniziale. Se,
per fissare le idee, tale rapporto è positivo, allora risulta ṡ(t) < 0 in I ∩ (−∞, t0 )
147
e ṡ(t) > 0 in I ∩ (t0 , +∞): all’istante t0 il moto da retrogrado diviene dunque
progressivo. Similmente si prova che se il rapporto è negativo allora all’istante t0
il moto da progressivo diviene retrogrado.
Dimostriamo adesso che il moto è rappresentabile nella forma (4.3.5) anche
quando la velocità si annulla all’istante iniziale purché la posizione iniziale non
individui una configurazione di equilibrio.
Teorema 4.3.5
Sia p un punto in moto su una curva γ sotto l’azione di una forza posizionale
di energia potenziale U . All’istante t0 la particella occupi la posizione di ascissa
curvilinea s0 con velocità nulla. Allora, nell’ipotesi che sia U 0 (s0 ) 6= 0, esiste
un numero positivo τ tale che le restrizioni della legge oraria s(t) agli intervalli
[t0 − τ, t0 ] e [t0 , t0 + τ ] si determinano invertendo l’applicazione (4.3.5), con E =
U (s0 ), dove se U 0 (s0 ) < 0 dovremo fissare il segno + in [t0 , t0 + τ ], quello − in
[t0 −τ, t0 ] mentre al contrario se U 0 (s0 ) > 0 dovremo fissare il segno − in [t0 , t0 +τ ],
quello + in [t0 − τ, t0 ].
Dimostrazione - Dimostriamo il Teorema riferendoci al caso U 0 (s0 ) < 0; la dimostrazione relativa all’ipotesi U 0 (s0 ) > 0 è del tutto analoga con le ovvie modifiche
del caso.
Nelle ipotesi del Teorema, la funzione integranda che figura nella (4.3.5) è
definita in un intorno destro di s0 e diverge in tale punto; è dunque necessario
preliminarmente mostrare che l’integrale risulta finito. A tale scopo, è sufficiente
provare che è finito l’integrale
Z
s∗
s0
dξ
q
2
m (E
− U (ξ))
in corrispondenza di un qualche valore s∗ . Si fissi allora tale valore in modo che
sia U 0 (s) < 0 in [s0 , s∗ ]; a norma del Teorema di Lagrange, per ogni ξ ∈ [s0 , s∗ ]
¯
esiste un valore ξ¯ ∈ (s0 , ξ), nel quale risulta E − U (ξ) = |U 0 (ξ)|(ξ
− s0 ); posto
0
allora l = min |U (s)|, è senz’altro
s∈[s0 ,s∗ ]
E − U (ξ) ≥ l(ξ − s0 )
∀ξ ∈ [s0 , s∗ ]
e quindi
Z
s∗
s0
dξ
q
2
m (E
− U (ξ))
r
≤
m
2l
Z
s∗
s0
√
L’integrale al primo membro è dunque finito.
dξ
=
ξ − s0
r
2m
(s∗ − s0 ).
l
148
Ciò premesso, denotiamo con b un numero tale che si abbia E − U (s) > 0 in
(s0 , b] e poniamo
Z s
Z s
dξ
dξ
q
q
S+ (s) =
e
S− (s) = −
,
2
2
s0
s0
m (E − U (ξ))
m (E − U (ξ))
con s ∈ (s0 , b]. Entrambe le funzioni S+ e S− sono invertibili e assumono i propri
valori, rispettivamente, in [0, τ ] e [−τ, 0], essendo τ il valore dell’integrale tra gli
estremi s0 e b. Poniamo allora
−1
S (t − t ) t ∈ [t − τ, t ],
−
0
0
0
s(t) = −1
S + (t − t0 ) t ∈ [t0 , t0 + τ ].
La funzione s è continua in [t0 − τ, t0 + τ ], è derivabile al di fuori dell’istante t0 e
verifica la condizione
lim ṡ(t) = 0.
t→t0
Dunque essa è derivabile anche in t0 e ṡ(t0 ) = 0. Del tutto analogamente si prova
che s è derivabile due volte in [t0 − τ, t0 + τ ]. Derivando s rispetto al tempo si ha
r
2
d −1
1
ṡ(t) =
S ± (t − t0 ) = 0
=±
(E − U (s(t)))
dt
S± (s(t))
m
e pertanto, quadrando ambo i membri, si trova che la funzione s(t) è soluzione in
[t0 − τ, t0 + τ ] dell’equazione differenziale (4.3.2). In virtù del Teorema 4.3.1 essa è
soluzione dell’equazione del moto in tutti gli istanti in cui ṡ 6= 0. D’altra parte si
ha ṡ = 0 solo per t = t0 e dunque, per la continuità di tutte le funzioni coinvolte,
l’equazione del moto è soddisfatta anche all’istante iniziale.
4.4
Ritratto di fase e insiemi di livello dell’energia
Nella precedente sezione siamo pervenuti alla determinazione della soluzione di
ogni problema di Cauchy per l’equazione (4.3.1) almeno in un intorno dell’istante
iniziale. La completa integrazione del sistema richiede, di fatto, l’individuazione
della soluzione massimale di ogni problema di Cauchy e a tale obiettivo rivolgeremo l’attenzione nella prossima sezione. Prima però, anche in vista di quel fine,
vogliamo soffermarci sullo studio delle proprietà qualitative dei moti del sistema
che stiamo considerando che si desumono dal suo ritratto di fase.
In primo luogo, riduciamo l’equazione (4.3.1) al sistema del primo ordine
ṡ = v,
mv̇ = −U 0 (s).
(4.4.1)
149
Le (4.4.1) definiscono un sistema dinamico D il cui spazio delle fasi è una striscia
J × R di R2 ed il cui campo vettoriale è determinato dalla corrispondenza
(s, v) ∈ J × R 7→ (v, −U 0 (s)) ∈ R2 .
Le orbite del sistema dinamico D sono state definite come le immagini nello spazio
delle fasi delle soluzioni massimali del sistema (4.4.1) e il ritratto di fase è la
collezione di tutte le orbite.
La determinazione del ritratto di fase richiede, per sua stessa definizione, la
conoscenza delle soluzioni massimali, ma nel caso dei sistemi a un grado di libertà
la conservazione dell’energia meccanica consente di determinare il ritratto di fase
senza integrare il sistema di equazioni differenziali.
Consideriamo nello spazio delle fasi la funzione energia meccanica totale
E(s, v) =
1
mv 2 + U (s)
2
e associamo ad ogni numero reale E il corrispondente insieme di livello dell’energia,
luogo dei punti dello spazio delle fasi verificanti l’equazione
E(s, v) =
1
mv 2 + U (s) = E.
2
Teorema 4.4.1
Ogni orbita del sistema dinamico D è interamente contenuta in una curva di livello
dell’energia.
Dimostrazione - Sia (s(t), v(t)) (t ∈ I) una soluzione massimale del sistema (4.4.1).
In virtù del Teorema 4.1.2 si ha identicamente
1
mv 2 (t) + U (s(t)) = E
2
con
1
mv 2 + U (s0 ).
2 0
L’orbita corrispondente è dunque contenuta nell’insieme di livello relativo al valore
E.
E=
Particolarizzando i risultati della Sezione ?? possiamo affermare che gli insiemi di livello, privati degli eventuali punti singolari dell’energia, sono delle curve
regolari del piano delle fasi che chiameremo curve di livello. I punti singolari si
determinano annullando entrambe le derivate della funzione energia totale:
∂E
= U 0 (s) = 0,
∂s
∂E
= mv = 0;
∂v
essi appartengono quindi all’asse delle posizioni ed hanno le ascisse delle configurazioni di equilibrio del sistema. In definitiva, i punti singolari di E coincidono con
150
v
E
s
a
b
c
d
E
s
a
b
c
d
Figura 4.4.1: insieme di livello.
quelli del sistema dinamico D e individuano le orbite corrispondenti alle soluzioni
di quiete. Una volta privati di tali punti, le curve di livello si identificano con una
o più orbite. Nella prossima sezione condurremo uno studio sistematico dei diversi
casi che possono presentarsi il cui esito si esprime sinteticamente nelle affermazioni
che seguono:
(i) ogni punto singolare dell’energia è un’orbita degenere corrispondente a una
soluzione di quiete;
(ii) ogni singola componente connessa di una curva di livello è un’orbita del
sistema dinamico.
L’importanza di questo risultato è manifesta in quanto riduce la determinazione
del ritratto di fase al disegno degli insiemi di livello dell’energia i quali possono
tracciarsi non appena sia assegnata l’energia potenziale.
Le considerazioni che seguono sono volte all’individuazione di alcune caratteristiche generali degli insiemi di livello che prescindono dalla particolare forma della
funzione U e che consentono di disegnarne l’andamento qualitativo sulla base delle
caratteristiche del grafico qualitativo di U .
Per ogni livello di energia E, la corrispondente curva è contenuta nella regione
del piano delle fasi individuata dalla condizione
E − U (s) ≥ 0.
(4.4.2)
Per semplicità, supporremo che la funzione E − U (s) possegga esclusivamente
zeri isolati; in tale ipotesi, la (4.4.2) individua in quel piano un certo numero di
strisce delimitate da rette parallele all’asse delle velocità in corrispondenza delle
soluzioni dell’equazione
E − U (s) = 0.
(4.4.3)
151
Queste possono determinarsi graficamente come ascisse delle intersezioni del grafico dell’energia potenziale con la retta orizzontale corrispondente al valore E considerato. La figura 4.4.1 esemplifica i precedenti ragionamenti, mostrando una ipotetica energia potenziale la quale interseca il livello di energia E nei quattro valori
a, b, c e d; le curve di livello devono pertanto essere contenute nelle due strisce
a ≤ s ≤ b e c ≤ s ≤ d del piano delle fasi. All’insieme di livello appartengono
i quattro punti (a, 0), (b, 0), (c, 0) e (d, 0); al di fuori di tali punti, le curve di
livello sono regolari e risultano simmetriche rispetto all’asse delle posizioni, essendo
composte dai due archi di grafico di equazioni
r
2
(E − U (s)).
(4.4.4)
v=±
m
Con riferimento all’intervallo [a, b] e al ramo positivo, tale funzione, partendo da 0
nell’estremo a, cresce fino ad assumere un massimo nel punto, diciamo smin , in cui
l’energia potenziale assume il proprio minimo locale per poi decrescere nuovamente
fino ad annullarsi in b; il ramo negativo dell’insieme di livello si disegna riflettendo
quello positivo rispetto all’asse delle ascisse. In modo del tutto analogo si disegna
la componente dell’insieme di livello relativa all’intervallo [c, d].
v
E
E6
s
E5
E4
E3
E2
E1
s
E1
E2
E3
E4
E5
E6
Figura 4.4.2: insiemi di livello.
La figura 4.4.2 mostra le curve di livello per la medesima energia potenziale
della figura 4.4.1 in corrispondenza a diversi livelli di energia potenziale. L’insieme
relativo al livello E1 si riduce ad un unico punto singolare. Quello relativo a E2 è
una curva chiusa mentre quello relativo a E3 è composto da una curva chiusa e da
un punto singolare. L’insieme relativo al livello E4 è composto da due curve chiuse.
L’insieme corrispondente al livello E5 contiene un punto singolare, rimosso il quale
restano due curve aperte. Infine, l’insieme relativo al livello E6 è costituito da
un’unica curva chiusa. Tali considerazioni forniscono una descrizione del ritratto
152
di fase quando si assumano come vere le affermazioni (i) e (ii) precedentemente
enunciate. Mentre la (i) è stata effettivamente provata, resta da giustificare la (ii),
la cui verifica scaturirà da uno studio dei moti massimali del sistema dinamico D
cui è dedicata la prossima sezione.
• Osservazione 4.4.1
Nei punti di regolarità, le curve di livello hanno vettore tangente proporzionale a
(mv, −U 0 (s)), rispettivamente; in particolare, esse intersecano l’asse delle posizioni
con tangenza verticale, purché tali intersezioni non coincidano con le configurazioni
di equilibrio del sistema. Quando le curve di livello intersecano l’asse delle posizioni
proprio in una configurazione di equilibrio a — come accade, nell’esempio di figura
4.4.2, in corrispondenza al livello di energia E5 — è facile provare
p che le loro
tangenti in tali intersezioni sono le rette di coefficiente angolare ± U 00 (a)/m. 4.5
Caratterizzazione dei punti singolari, periodici e aperiodici
Nella precedente sezione abbiamo osservato che il moto di un punto su una curva
γ sotto l’azione di una forza di energia potenziale U e in corrispondenza a un’energia totale E sono necessariamente confinati in quegli intervalli di γ nei quali è
verificata la disuguaglianza (4.4.2). Le considerazioni che seguono sono volte, in
primo luogo, a mostrare che il moto corrispondente a un dato iniziale s0 è più
precisamente confinato in quel particolare intervallo contenente s0 . Sulla scorta ci
tale osservazione studieremo poi i diversi moti del sistema classificandoli in accordo
alle caratteristiche dell’intervallo in cui essi hanno luogo, a seconda che questo sia
limitato o meno, aperto o chiuso.
Sia E il generico livello di energia che supporremo senz’altro maggiore dell’estremo inferiore della funzione energia potenziale. L’equazione (4.4.3) può non ammettere alcuna soluzione, nel qual caso è sempre E − U (s) > 0, ovvero può ammeterne un certo numero N (eventualmente una infinità numerabile) che costituiscono
gli estremi di N + 1 intervalli due dei quali non limitati.
Definizione 4.5.1 (di livelli di energia ordinari e critici)
Un livello di energia E si dice critico per il sistema dinamico D se il relativo
insieme di livello dello spazio delle fasi contiene almeno un punto singolare. Un
livello di energia si dice ordinario se non è critico.
Le curve di livello che corrispondono ai livelli critici si denominano separatrici; tale denominazione è giustificata dall’osservazione che tutte le curve di livello
contenute tra due separatrice sono topologicamente equivalenti.
Con riferimento all’esempio illustrato nella figura 4.4.2 i livelli critici sono E1 ,
E3 ed E5 mentre sono ordinari tutti i livelli appartenenti agli intervalli (E1 , E3 ),
(E3 , E5 ) e (E5 , +∞).
153
Teorema 4.5.1
Un livello di energia E è ordinario per il sistema dinamico D se e solo se tutte le
soluzioni dell’equazione (4.4.3) sono semplici.
Dimostrazione - Sia E un livello ordinario e si supponga, per assurdo, che la (4.4.3)
possegga uno zero non semplice sc ; allora in sc risulta allo stesso tempo
U (sc ) = E
e
U 0 (sc ) = 0
(4.5.1)
e dunque l’insieme di livello relativo ad E contiene il punto singolare (sc , 0). Ciò
implica che il livello E è critico, in contrasto con l’ipotesi.
Si assuma, viceversa, che tutti gli zeri siano semplici e si supponga, per assurdo,
che il livello E sia critico. Allora al suo insieme di livello appartiene un punto
singolare sc ed in tale punto sono verificate entrambe le equazioni (4.5.1) cosicché
sc è uno zero non semplice, in contrasto con l’ipotesi.
In definitiva, i livelli di energia critici sono quelli che risultano tangenti al
grafico dell’energia potenziale nei suoi punti stazionari.
Il Teorema 4.5.1 comporta che che sui livelli di energia ordinari la funzione
E − U (s) cambia segno in tutti i suoi zeri. Posto infatti che risulti E − U (a) = 0,
deve allora necessariamente essere U 0 (a) > 0 oppure U 0 (a) < 0. Nel primo caso U
è strettamente crescente in a e pertanto si ha U (s) < E in un intorno sinistro di
a e U (s) > E in uno destro; nel secondo U è strettamente decrescente in a e si ha
pertanto U (s) > E in un intorno sinistro di a e U (s) < E in uno destro.
Dunque, in corrispondenza a un livello ordinario E le soluzioni dell’equazione
E −U (s) = 0 determinano un certo numero di intervalli in cui la funzione E −U (s)
alterna il proprio segno.
Teorema 4.5.2
Sia E un livello ordinario per il sistema dinamico D e sia Ji un intervallo compreso
tra due zeri della funzione E − U (s) nel quale risulti E − U (s) ≥ 0. Allora se
s0 ∈ Ji , si ha s(t) ∈ Ji per ogni t appartenente all’insieme di definizione della
corrispondente soluzione massimale.
Dimostrazione - Si assuma, per assurdo, che per qualche t̄, s(t̄) appartenga ad un
intervallo Jh distinto da Ji in cui E − U (s) ≥ 0; supposto, per fissare le idee, che
l’intervallo Jh sia alla destra di Ji allora, per la continuità del moto, tra l’istante t0
e l’istante t̄ la particella deve assumere tutte le posizioni di ascissa compresa tra il
massimo di Ji e il minimo di Jh , la qual cosa è impossibile perché in tale intervallo
sono senz’altro comprese configurazioni per le quali risulta E − U (s) < 0.
Se E è non minore dell’estremo superiore di U in J, allora è E − U (s) > 0
in tutto l’intervallo J = (α, β) di definizione di U ; se invece E è più piccolo
dell’estremo superiore di U , allora l’equazione E − U (s) possiede soluzioni e gli
intervalli che essi individuano sono di due specie: quelli che hanno un estremo
in comune con J e secondo estremo in uno zero semplice di E − U (s), quelli che
154
hanno entrambi gli estremi in zeri semplici di E −U (s). In definitiva, se il moto del
sistema dinamico D corrisponde a un livello di energia ordinario, deve senz’altro
realizzarsi una delle tre seguenti situazioni:
(i) il moto avviene nell’intervallo chiuso [a, b] delimitato da due zeri semplici
della funzione E − U (s);
(ii) il moto avviene in un intervallo, eventualmente semilimitato, (α, a] o [a, β),
a essendo uno zero semplice di E − U (s);
(iii) il moto avviene in tutto l’insieme di definizione di U (eventualmente in R).
Consideriamo adesso un livello critico E e sia sc uno zero multiplo di E − U (s);
se sc è un minimo di U , allora risulta E − U (s) < 0 sia a destra che a sinistra di sc ,
e dunque il sistema non può assumere alcuna posizione distinta da sc in un intorno
di tale valore. Se sc è un punto di flesso per U allora la funzione E − U (s) cambia
il proprio segno in sc , delimitando dunque un intervallo in cui può avere luogo
il moto da uno non accessibile con quel valore dell’energia. Se, invece, l’energia
potenziale ha un massimo in sc , allora risulta E − U (s) > 0 sia alla destra che alla
sinistra di sc e dunque, in linea di principio, la particella potrebbe in un suo moto
di energia E attraversare la posizione di ascissa sc passando dalla sua sinistra alla
sua destra o viceversa. Di fatto, ciò non può accadere, come assicura il
Teorema 4.5.3
Sia sc un punto di massimo locale o di flesso a tangente orizzontale dell’energia
potenziale U di un sistema dinamico D e sia s̄ : I → R un moto del sistema
corrispondente al livello di energia E = U (sc ). Allora si ha s̄(t) < sc per ogni
t ∈ I oppure s̄(t) > sc per ogni t ∈ I.
Dimostrazione - Se per assurdo esistono due istanti t1 e t2 tali che s̄(t1 ) < sc
e s̄(t2 ) > sc , allora, per la continuità del moto, deve anche esistere un istante
τ ∈ (t0 , t̄) tale che s̄(τ ) = sc ; in tale istante, essendo E = U (sc ), deve aversi
v(τ ) = 0. Dunque, tanto la funzione s̄(t) quanto la funzione costante s(t) = sc
sono soluzioni del problema di Cauchy con dati iniziali s(τ ) = sc e v(τ ) = 0 in
contrasto con il Teorema di unicità.
Ciò premesso, nel considerare i moti corrispondenti a livelli critici dell’energia,
alle tre possibilità precedentemente elencate è necessario aggiungere le seguenti
altre:
(iv) il sistema è in quiete in una punto stazionario di U ;
(v) il moto avviene in un intervallo che ha almeno un estremo in un punto
stazionario di U .
155
I risultati precedentemente esposti ci pongono finalmente in grado di pervenire
ad una classificazione dei moti possibili per un punto vincolato a una curva in
presenza di una forza posizionale.
• Punti singolari
La caratterizzazione dei punti singolari del sistema dinamico posizionale D è
già stata fornita in Sezione 4.4. La riportiamo qui per completezza rimandando a
quella sezione per la sua giustificazione.
Teorema 4.5.4
Condizione necessaria e sufficiente affinché un punto dello spazio delle fasi sia
un punto singolare del sistema dinamico posizionale D è che esso sia un punto
singolare del campo vettoriale (s, v) 7→ (v, −U 0 (s)).
Esplicitando il contenuto dell’enunciato del Teorema, un punto è singolare se
e solo se ha coordinate (sc , 0) con sc soluzione dell’equazione U 0 (s) = 0. Tale
situazione corrisponde al caso (iv) del precedente elenco.
• Punti periodici
Il seguente Teorema caratterizza i punti periodici di un sistema dinamico
posizionale.
Teorema 4.5.5
Un punto (s0 , v0 ) dello spazio delle fasi di D è periodico se e solo se, posto E =
1
2
2 mv0 + U (s0 ), s0 è compreso tra due radici semplici dell’equazione E − U (s) = 0.
Dimostrazione - Se il moto è periodico, l’orbita è una curva chiusa. Poiché tale
eventualità è compatibile solo con la condizione (i), la posizione iniziale deve essere
necessariamente compresa tra due zeri semplici della funzione E − U (s).
Viceversa, si assuma che s0 e v0 siano assegnati in modo che s0 appartenga
all’intervallo [a, b] delimitato da due radici semplici dell’equazione E − U (s) = 0
(figura 4.5.1). Mostriamo innanzi tutto che il moto è effettivamente periodico nel
caso s0 = a e v0 = 0. In tale circostanza, assumendo senza perdita di generalità
t0 = 0, la legge oraria del moto per t ≥ 0 si determina invertendo l’equazione
Z s
dξ
q
t=
2
a
m (E − U (ξ))
nella quale s può assumere tutti i valori appartenenti all’intervalo [a, b]. In corrispondenza, t varia nell’intervallo [0, T /2], dove si è posto
T
=
2
Z
a
b
dξ
q
2
m (E
− U (ξ))
.
156
v
E
E
a
b
s
s
a
b
Figura 4.5.1: orbita periodica.
In particolare, si ha
s(T /2) = b,
ṡ(T /2) = 0.
Per t ≤ 0, invece, la legge oraria si ottiene invertendo l’equazione
Z s
dξ
q
t=−
2
a
m (E − U (ξ))
nella quale s varia ancora in [a, b] e t, di conseguenza, descrive l’intervallo [−T /2, 0].
All’istante −T /2 si ha
s(−T /2) = b,
ṡ(−T /2) = 0
e pertanto sia la posizione che la velocità assumono gli stessi valori negli istanti
−T /2 e T /2. Il moto è dunque periodico con periodo T .
Nel semiperiodo [0, T ], la particella
assume tutte le posizioni dell’intervallo
q
2
m (E
− U (s)) mentre in [−T, 0] assume tutte le
q
2
posizioni in [a, b] con velocità negativa v = − m
(E − U (s)); pertanto l’orbita
coincide con l’insieme di livello dell’energia. In virtù di tale considerazione, la
dimostrazione si estende a tutte le possibili scelte di dati iniziali per l’invarianza
dell’orbita rispetto al punto iniziale.
[a, b] con velocità positiva v =
Esplicitando il contenuto della dimostrazione, il periodo del moto in corrispondenza al caso (i) ha l’espressione
Z
T =2
a
b
dξ
q
2
m (E
− U (ξ))
.
(4.5.2)
157
v
E
a
s
E
s
a
Figura 4.5.2: orbita aperiodica semilimitata.
• Punti aperiodici
Le caratterizzazioni fornite per i punti singolari e per quelli periodici determinano, indirettamente, i punti aperiodici che si identificano con quei punti del
piano delle fasi non singolari e che non realizzano le ipotesi del Teorema 4.5.5. Con
riferimento alla classificazione precedentemente introdotta, se il moto avviene su
un livello ordinario si realizza una delle ipotesi (ii) o (iii) mentre se avviene su un
livello critico allora si verifica la condizione (v).
Passiamo ora allo studio del caso (ii) riferendoci, per fissare le idee, all’intervallo [a, β) tra uno zero semplice a e l’estremo superiore dell’insieme di definizione
di U . La figura 4.5.2 mostra un grafico di energia potenziale che esemplifica questa
situazione e il relativo insieme di livello dello spazio delle fasi che è costituito da
una curva aperta e connessa.
Mostriamo che la curva di livello contiene una sola orbita. A tale scopo è
sufficiente verificare che, preso un qualsiasi punto sulla curva, ad esempio quello
di coordinate (a, 0), l’orbita contenente tale punto si identifica con la curva. La
legge oraria del moto di dati iniziali s0 = a e v0 = 0 si determina invertendo le
due funzioni
Z s
dξ
q
t=±
2
a
m (E − U (ξ))
nelle quali s assume tutti i valori in [a, β). L’inversa della determinazione positiva descrive il moto della particella per t > 0, quella negativa per t < 0.
158
v
E
E
s
s
Figura 4.5.3: orbite aperiodiche non limitate.
Complessivamente, la variabile t varia nell’intervallo (−Tβ , Tβ ) con
β
Z
Tβ =
a
dξ
q
2
m (E
.
− U (ξ))
La legge oraria in tal modo determinata verifica le condizioni di limite
lim s(t) = β.
t→±Tβ
Nell’intervallo (−Tβ , 0) il moto è retrogrado e la particella
qattraversa tutte le posi-
2
(E − U (s)). Nell’orizioni appartenenti all’intervallo [a, β) con velocità v = − m
gine dei tempi la particella inverte senso di marcia e nell’intervallo (0, Tβ ) viaggia
con moto progressivo passando
per tutte le posizioni appartenenti all’intervallo
q
[a, β) con velocità v =
2
m (E
− U (s)).
Osserviamo esplicitamente che Tβ può essere finito o infinito, in dipendenza
dalla forma esplicita della funzione U e dalla circostanza che l’estremo β sia finito
o infinito.
Consideriamo adesso quei punti dello spazio delle fasi in corrispondenza dei
quali l’energia E supera l’estremo superiore dell’energia potenziale. In tal caso
la disuguaglianza E − U (s) ≥ 0 è verificata strettamente in tutto l’insieme di
definizione (α, β) dell’energia potenziale. L’insieme di livello dell’energia è dunque
composto da due curve aperte e connesse poste una al di sopra e una al di sotto
dell’asse delle posizioni, come mostrato in figura 4.5.3.
Sia (s0 , v0 ) (v0 > 0) un punto appartenente al ramo superiore dell’insieme di
livello. La legge oraria del moto che corriponde a questi dati iniziali si esprime
159
invertendo la funzione
Z
s
t=
s0
dξ
q
2
m (E
− U (ξ))
q
2
nella quale s assume tutti i valori in (α, β) con velocità v = m
(E − U (s)); dunque effettivamente durante il moto viene percorso l’intero ramo dell’insieme di livello posto al di sopra dell’asse delle posizioni. L’intervallo massimale di definizione
della soluzione è dato da (−Tα , Tβ ), dove
Z
s0
Tα =
α
dξ
q
2
m (E
Z
,
β
Tβ =
− U (ξ))
s0
dξ
q
2
m (E
.
− U (ξ))
Ciascuno di tali estremi può risultare, a seconda dei casi, finito o infinito. Il moto
è sempre progressivo e verifica le condizioni
lim s(t) = α,
t→−Tα
lim s(t) = β.
t→Tβ
Con argomenti del tutto analoghi si prova che il ramo dell’insieme di livello posto al di sotto dell’asse delle posizioni corrisponde a un moto retrogrado definito
nell’intervallo (−Tβ , Tα ).
Restano da analizzare quelle situazioni in cui il moto avviene su un livello critico
dell’energia in prossimità di un massimo dell’energia potenziale. Tale circostanza è
rappresentata in figura 4.5.4 nella quale, accanto al grafico dell’energia potenziale
con un massimo nel punto c, è disegnato l’insieme di livello nell’intorno del punto
(c, 0). Tale insieme, privato del punto (c, 0) è localmente costituito da quattro
rami di curve, due entranti nel punto critico e due uscenti da esso. In virtù del
v
E
E
s
c
s
c
Figura 4.5.4: orbite nell’intorno di un massimo dell’energia potenziale.
160
Teorema 4.5.3, un punto che si trovi, ad esempio, alla sinistra di c con velocità
positiva, non raggiunge mai la posizione c. Mostriamo, in effetti, che l’integrale
Z c
dξ
q
2
s0
m (E − U (ξ))
è infinito. Applicando all’energia potenziale U la formula di Taylor con punto c e
resto in forma di Lagrange, abbiamo
1
¯ − c)2 ,
U (ξ) = E + U 00 (ξ)(ξ
2
con ξ¯ ∈ [ξ, c]; d’altra parte risulta, per ipotesi, U 00 < 0 in un opportuno intervallo
[s∗ , b] e pertanto, posto M = max |U 00 (ξ)|, si ha
ξ∈[s∗ ,c]
E − U (ξ) ≤
e quindi
Z
c
s∗
1
M (ξ − c)2
2
r
dξ
q
2
m (E
− U (ξ))
≥
m
M
∀ξ ∈ [s∗ , c]
Z
c
s∗
dξ
= +∞.
c−ξ
Nel caso sia U 00 (c) = 0 lo stesso risultato si ottiene semplicemente osservando
che, in virtù della formula di Taylor del secondo ordine con punto iniziale c, la
differenza E − U (ξ) tende a zero più velocemente di (ξ − c)2 quando ξ tende a c.
In virtù di quanto abbiamo appena mostrato possiamo affermare che i moti
corrispondenti ai diversi rami dell’insieme di livello rappresentato in figura 4.5.4
verificano una delle due condizioni di limite
lim s(t) = c
t→±∞
a seconda che si diriggano verso c o che ne provengano. La posizione c che non viene
mai raggiunta in tali moti viene denominata meta asintotica e i corrispondenti moti
si dicono verso o da meta asintotica.
Le caratteristiche globali del moto dipendono dalla soluzione dell’equazione
E − U (s) = 0 più prossima ad s0 dal lato opposto di c. La figura 4.5.5 mostra tre
esempi in cui la posizione iniziale è posta tra uno zero semplice A di quell’equazione
e il massimo c, ovvero tra due massimi a e c, ovvero ancora tra c e un estremo
dell’intervallo di definizione di U .
Nel primo caso, l’orbita corrisponde a un moto in cui la particella proviene dalla
meta asintotica c, raggiunge la posizione a dove inverte il senso di marcia per poi
dirigersi nuovamente verso la meta asintotica c. Nel secondo si individuano due
orbite distinte che corrispondono ai due moti, progressivo o retrogrado, tra le due
mete a e c. Infine, nel terzo caso sono ancora presenti due orbite che corrispondono
a un moto dalla meta c verso l’estremo β dell’intervallo di definizione di U e a uno
da β verso c.
161
E
v
E
a
c
s
s
a
c
E
v
E
s
a
a
c
s
c
E
v
E
c
s
c
Figura 4.5.5: orbite di moti verso meta asintotica.
s
162
4.6
Relazione tra ampiezza e periodo nei moti periodici
L’oscillatore armonico, studiato in Sezione 4.2, costituisce un esempio di sistema
dinamico ad un grado di libertà sottoposto ad una forza posizionale e pertanto
possono applicarsi ad esso tutte le considerazioni svolte nella Sezione 4.5.
L’energia potenziale della forza elastica è data da
U (s) =
1 2
ks
2
(4.6.1)
ed è dunque una parabola con vertice nell’origine delle coordinate e concavità
rivolta verso l’alto (figura 4.6.1). Gli insiemi di livello dell’energia hanno equazione
E
E
s
b(E)
a(E)
Figura 4.6.1: energia potenziale della forza elastica.
1
1
mv 2 + ks2 = E.
2
2
Nel caso del livello critico E = 0 esso si riduce al punto (0, 0) e corrisponde alla
soluzione di equilibrio stabile.
p
p Per ogni livello E > 0 le curve di livello sono ellissi di semiassi 2E/k e
2E/m. Ognuna di tali ellissi è l’orbita di un moto periodico tra le due radici
semplici
r
r
2E
2E
a(E) = −
,
b(E) =
k
k
dell’equazione E − U (s) = 0.
Posto, per fissare le idee, s(0) = b(E), la legge oraria dei moti periodici si
determina invertendo le due funzioni
Z b(E)
dξ
q
t=±
2
1
2
s
m (E − 2 kξ )
163
v
s
Figura 4.6.2: ritratto di fase dell’oscillatore armonico.
e prolungando per periodicità la funzione cosı̀ determinata. La valutazione degli
integrali si esegue elementarmente e non è difficile controllare che l’espressione della
soluzione cui si perviene coincide, nella sua forma più generale, con la (4.2.5).
In particolare, come si è già osservato, le oscillazioni armoniche verificano la
proprietà di essere isocrone, cioè di non dipendere dall’ampiezza o, ciò che è lo
stesso, dall’energia. È interessante allora chiedersi se questa proprietà sia caratteristica dell’oscillatore armonico, ovvero si manifesti anche in altri sistemi dinamici. Per dare una risposta a tale domanda, affrontiamo una questione un pò più
generale; consideriamo un punto p di massa m in moto su una curva assegnata sotto
l’azione di una forza posizionale di richiamo verso una certa configurazione che,
senza perdita di generalità, potremo assumere come origine delle ascisse curvilinee.
L’energia potenziale U (s) presenta allora in 0 un minimo assoluto e rivolge la
concavità verso l’alto in un intorno di tale punto. Possiamo senz’altro fissare la
costante arbitraria nell’energia potenziale di modo che si abbia U (0) = 0. In figura
4.6.3 è rappresentato l’andamento qualitativo di U .
Se l’energia E della particella non supera un opportuno valore Ē, il sistema si
muove periodicamente tra due configurazioni s = a(E) e s = b(E) esplicitamente
dipendenti dal livello di energia. Il periodo del moto dipende, a sua volta, da E
secondo la legge
Z b(E)
dξ
q
T (E) = 2
.
(4.6.2)
2
a(E)
m (E − U (ξ))
La (4.6.2) consente il calcolo esplicito del periodo posto che sia nota l’energia
potenziale; domandiamoci se sia possibile, inversamente, determinare l’espressione
dell’energia potenziale quando sia assegnata la dipendenza del periodo dall’energia.
164
E
E
s
a(E)
b(E)
Figura 4.6.3: energia potenziale di un forza di richiamo.
Osserviamo, innanzi tutto, che le funzioni a(E) e b(E) sono, rispettivamente,
le inverse delle restrizioni della funzione U (s) a un intorno sinistro e a uno destro
di 0, di modo che la determinazione dell’energia potenziale è ricondotta a quella
di tali funzioni. Si ha
Z b(E)
√
dξ
p
T (E) = 2m
E − U (ξ)
a(E)
Z 0
Z b(E)
√
√
dξ
dξ
p
p
= 2m
+ 2m
.
E − U (ξ)
E − U (ξ)
a(E)
0
Operando, nei due integrali precedenti, la sostituzione u = U (ξ), si ha
Z 0 0
Z E 0
√
√
a (u)
b (u)
√
√
du + 2m
du
T (E) = 2m
E−u
E−u
E
0
e dunque
√
E
du
.
E
−u
0
Indicato con E un generico livello di energia, scriviamo
√ la precedente relazione per
un valore e ≤ E, dividiamo entrambi i membri per E − e ed integriamo in e tra
0 ed E:
Z E Z e
Z E
√
T (e)
du
0
0
√
de = 2m
[b (u) − a (u)] √
de.
√
E−e
E−e e−u
0
0
0
T (E) =
Z
2m
[b0 (u) − a0 (u)] √
L’ultimo integrale è esteso alla regione triangolare del piano u − e evidenziata in
figura 4.6.4; un’inversione dell’ordine di integrazione dà
!
Z E
Z E
Z E
√
T (e)
de
0
0
√
√
de = 2m
[b (u) − a (u)]
du,
√
E−e
E−e e−u
0
0
u
165
e
E
u
E
Figura 4.6.4: dominio di integrazione.
e dunque
1
b(E) − a(E) = √
π 2m
Z
E
0
T (e)
√
de.
E−e
(4.6.3)
La (4.6.3) non consente la determinazione univoca delle due funzioni a(E) e
b(E), ma solo quella della loro differenza. In particolare, quando T non dipende
da E, da essa segue immediatamente
r
T 2E
b(E) − a(E) =
(4.6.4)
π
m
Esistono dunque infinite energie potenziali che definiscono sistemi isocroni; tali
energie si determinano fissando ad arbitrio uno dei due rami e determinando l’altro
attraverso la (4.6.4).
Se però l’energia potenziale è una funzione pari, allora a(E) = −b(E), di modo
che la (4.6.3) consente la determinazione della funzione b e, con essa, dell’energia
potenziale. In particolare, nel caso del periodo costante, risulta
r
T
E
s = b(E) =
,
π 2m
da cui, quadrando e ponendo
k=
2π
T
2
m,
si perviene alla seguente espressione dell’energia potenziale:
U (s) =
1 2
ks .
2
166
In conclusione, nella classe dei sistemi la cui energia potenziale è simmetrica rispetto alla posizione di richiamo, l’oscillatore armonico è il solo i cui moti hanno
periodo rigorosamente indipendente dall’energia.
• Esempio 4.6.1
Si consideri un punto p di massa m vincolato a muoversi senza attrito su una curva
regolare γ di un piano verticale sotto l’azione dell’unica forza attiva data dal suo
peso. Il moto di tale sistema risulta dalla composizione delle equazioni naturali
x1 (s) e x2 (s) della curva con la legge oraria s(t). Se nel piano del moto si assume
un riferimento con il primo asse orizzontale ed il secondo verticale e orientato verso
l’alto, l’energia potenziale si scrive
U (s) = mgx2 (s).
(4.6.5)
Si supponga che γ abbia un punto di quota minima, che faremo coincidere con
l’origine O del sistema di riferimento (figura 4.6.5); nell’intorno di tale punto γ è
il grafico di una funzione x2 (x1 ) che supporremo essere pari, di modo che la curva
sia simmetrica rispetto all’asse delle ordinate. Sotto tali condizioni, la funzione
x2
x1
Figura 4.6.5: la cicloide.
U (s) ha, a sua volta, un minimo in O ed è pari: di conseguenza, se p viene fatto
scivolare su γ da un punto prossimo a O, il suo moto avviene tra due zeri semplici
della funzione E − U (s) ed è pertanto periodico. È possibile costruire la curva γ
in modo che il periodo non dipenda dall’altezza dalla quale p è lasciato cadere? In
virtù di quanto precedentemente osservato, per rispondere a tale quesito occorre
determinare una curva in modo che l’energia potenziale (4.6.5) si riduca a quella
di un oscillatore armonico e ciò è possibile solo se risulta
x2 = αs2
per una qualche costante α > 0. Ora, si osservi che la funzione x2 (x1 ) è invertibile in un intervallo [0, x̄1 ]; denotata con x1 (x2 ) (x2 ∈ [0, x2 (x̄1 )]) la sua inversa,
l’ascissa curvilinea vale
Z x q
2
s=
0
1 + x01 2 (η) dη.
167
p
Derivando allora l’identità x2 /α = s rispetto a x2 e tenendo presente la precedente espressione di s, si ottiene
p
1
= 1 + x01 2
√
2 αx2
da cui, risolvendo rispetto a x01 , segue
r
1 − 4αx2
0
x1 =
.
4αx2
Integrando questa equazione col dato x1 (0) = 0, si trova
Z x2 r
1 − 4αη
x1 =
dη.
4αη
0
L’integrale al secondo membro si calcola eseguendo il cambiamento di variabile
r
1 − 4αη
;
τ=
4αη
si ha, in tal modo,
x1 =
1
2α
Z
+∞
q
1−4αx2
4αx
τ2
dτ
(1 + τ 2 )2
2
r
1 − 4αx2
1 p
(1 − 4αx2 )4αx2 + arccot
=
4α
4αx2
i
1 hp
(2 − 8αx2 )8αx2 + arccos(1 − 8αx2 ) .
=
8α
Posto R = 1/8α, l’equazione assume in definitiva la forma
x1 =
p
(2R − x2 )x2 + R arccos
che definisce una curva denominata cicloide.
R − x2
R
A conclusione delle considerazioni che abbiamo svolto circa la relazione tra
ampiezza e periodo nei moti periodici enunciamo, senza dimostrarla, una proposizione che ci consente di riguardare i piccoli moti di un sistema in prossimità di
una sua configurazione s̄ di equilibrio stabile, come delle oscillazioni armoniche e,
conseguentemente, isocrone.
Teorema 4.6.1
Sia p un punto materiale di massa m in moto su una curva liscia γ sotto l’azione
di una forza posizionale di energia potenziale U ; sia poi s̄ un minimo di U . Allora,
168
nell’ipotesi che sia U 00 (s̄) > 0, il periodo T (E) dei moti oscillatori intorno a s̄ è
regolare in Ē = U (s̄), avendosi
r
m
lim T (E) = 2π
.
00
U (s̄)
E→Ē
Il valore T del limite (4.6.1) fornisce una stima approssimata del periodo delle
oscillazioni di un sistema quando la sua energia supera di poco il valore critico
che corrisponde a una sua configurazione di equilibrio stabile. Un confronto della
(4.6.1) con la (4.2.6) mostra che tale periodo coincide con quello di un oscillatore
armonico con costante di elasticità
k = U 00 (s̄).
(4.6.6)
Le precedenti considerazioni giustificano l’idea di studiare le piccole oscillazioni
di un punto attorno a un minimo dell’energia potenziale linearizzando l’equazione
del moto ms̈ = −U 0 (s). Infatti, posto che U verifichi le ipotesi del Teorema 4.6.1,
possiamo scrivere
U 0 (s) = U 00 (s̄)(s − s̄) + o(s − s̄)
e dunque, a meno di termini o(s − s̄), il moto è governato dall’equazione
ms̈ = −k(s − s̄),
con k espresso dalla (4.6.6), le cui soluzioni sono dei moti armonici di periodo
(4.6.1).
4.7
Il pendolo semplice
Il pendolo semplice è un sistema costituito da un punto materiale di massa m
vincolato a muoversi su una circonferenza γ disposta in un piano verticale π solidale alla terra. Un tale vincolo può realizzarsi sospendendo il punto ad un’asta
rigida di massa trascurabile ruotante attorno all’asse orizzontale passante per il
suo secondo estremo (figura 4.7.1) ovvero consentendo al punto di scorrere su una
guida circolare.
Si introduca in π un sistema di riferimento con origine nel centro di γ, asse x1
orizzontale ed asse x2 verticale e diretto verso il basso e si denotino con R il raggio
di γ e con θ l’angolo che il raggio vettore della particella forma con la direzione
positiva dell’asse x2 . La circonferenza γ si rapprenta allora nella forma
x = R(sin θe1 + cos θe2 )
(4.7.1)
in funzione del parametro θ, è legato all’ascissa curvilinea s dalla semplice relazione
s = Rθ.
169
Il vettore unitario tangente a γ è dato da
t = cos θe1 − sin θe2 .
Le intersezioni di γ con l’asse delle ordinate si indicheranno con A, quella posta in
basso e avente ordinata R, e con B, quella posta in alto e avente ordinata −R.
B
x1
θ
A
R
p
x2
Figura 4.7.1: il pendolo.
Se gli attriti sono trascurabili, il moto del sistema si determina risolvendo
l’equazione (4.1.1) nella quale la componente lagrangiana della sollecitazione attiva
si riduce alla componente tangente a γ della risultante della forza peso p = mge2 :
f = mge2 · t = −mg sin θ.
L’equazione del moto del pendolo è dunque
θ̈ = −
g
sin θ.
R
(4.7.2)
Prima di passare allo studio dei moti del pendolo è necessario osservare che la
circonferenza non è globalmente omeomorfa a un intervallo di R ma, al contrario,
richiede almeno due omeomorfismi per poter essere interamente ricoperta. Tali
omeomorfismi possono entrambi rappresentarsi nella forma (4.7.1) facendo variare
θ una volta in (−π, π) e l’altra in (0, 2π). Poiché durante un moto il pendolo non
resta necessariamente confinato nel codominio di uno dei due omeomorfismi, i moti
massimali non sono in generali descrivibili da una soluzione di un semplice problema di Cauchy associato all’equazione (4.7.2) ma richiedono la soluzione di diversi
problemi di Cauchy da raccordare tra loro. In alternativa, lo studio dei moti del
pendolo può essere eseguito a partire da un sistema dinamico fittizio avente come
170
E
E4
E3
s
−π
E2
π
−
2
π
2
π
E1
Figura 4.7.2: l’energia potenziale del pendolo.
spazio delle configurazioni una retta e i cui moti siano le soluzioni dell’equazione
(4.7.2) nella quale si intenda θ variabile in tutto l’asse reale R. I moti del pendolo
reale si ottengono allora da quelli di questo sistema fittizio semplicemente identificando le configurazioni corrispondenti a valori di θ che differiscono per multipli
di 2π.
Ciò premesso, procediamo nello studio qualitativo dei moti del pendolo semplice osservando innanzi tutto che la sua energia potenziale ha la forma
U = −mgR cos θ.
(4.7.3)
Dal suo grafico (figura 4.7.2) si desume che l’energia meccanica non può essere
inferiore a −mgR e che esistono due livelli di energia critici i cui valori sono,
rispettivamente, −mgR e mgR. Per semplicità di notazione, è utile introdurre il
parametro adimensionale
E
e=
mgR
di modo che i livelli critici sono individuati dai valori −1 e 1.
In corrispondenza al livello E = −mgR (e = −1) la funzione U possiede infiniti
minimi di coordinate 2kπ (k ∈ Z) che però, per quanto precedentemente osservato,
rappresentano un’unica configurazione d’equilibrio che corrisponde al punto A.
Analogamente, al livello di energia E = mgR (e = 1) corrispondono gli infiniti
massimi di coordinate (2k + 1)π (k ∈ Z) che individuano una sola configurazione
d’equilibrio corrispondente al punto B.
Se l’energia del sistema è compresa tra i valori −mgR e mgR (e ∈ (−1, 1)), ricordando che il dato iniziale deve appartenere all’intervallo (−π, π), si può senz’altro affermare che il punto oscilla, in maniera periodica, tra due zeri semplici della
funzione E − U (θ), simmetrici rispetto alla configurazione d’equilibrio, i cui valori
171
v
−π
π
θ
Figura 4.7.3: il ritratto di fase del pendolo nel piano.
sono ±a(E) con
E
a(E) = arccos −
= arccos(−e).
mgR
(4.7.4)
Per tale motivo, i moti che corrispondono ai valori del parametro e ∈ (−1, 1) si
denominano moti oscillatori del pendolo e 2a è l’ampiezza di tali moti.
Se l’energia supera il valore mgR (e > 1), il sistema fittizio percorre l’intera
retta delle posizioni con moto sempre progressivo o sempre retrogrado. I corrispondenti moti effettivi del pendolo sono ancora periodici ma non hanno carattere
oscillatorio; più precisamente, il pendolo, partendo da una certa posizione iniziale,
possiede energia sufficiente per compiere un intero giro di circonferenza ritornando
nella posizione iniziale con la medesima velocità iniziale senza però mai invertire
senso di marcia. Questi appena descritti sono i moti rotatori del pendolo.
L’ultimo caso da considerare è quello in cui il livello d’energia vale esattamente mgR (e = 1); su tale livello sono possibili moti sempre progressivi o sempre
retrogradi tendenti asintoticamente, sia nel futuro che nel passato, alla configurazione di equilibrio B. In altre parole, il pendolo compie, in un tempo infinito, un
giro completo della circonferenza senza mai raggiungere, però, il punto B (moti
aperiodici del pendolo).
Sintetizzando quanto detto fin qui, il pendolo possiede due configurazioni di
equilibrio che corrispondono alle intersezioni della circonferenza cui è vincolato con
la verticale passante per il centro. I moti genuinamente dinamici sono oscillatori
quando e ∈ (−1, 1), rotatori se e > 1 e unidirezionali per e = 1.
La figura 4.7.3 mostra il ritratto di fase del sistema fittizio associato al pendolo,
determinato disegnando gli insiemi di livello dell’energia meccanica
1
mR2 θ̇2 − mgR cos θ = E.
2
172
Per ottenere una rappresentazione delle orbite effettive occorre tagliare tale figura
in corrispondenza delle rette θ = ±π e poi incollare tra loro i margini della figura
corrispondenti a tali tagli cosı̀ da ottenere un cilindro rappresentativo dell’effettivo
spazio delle fasi del pendolo semplice. La figura 4.7.4 visualizza, da due diversi
punti di vista, il risultato di tale operazione.
Figura 4.7.4: il ritratto di fase del pendolo.
Le curve di livello che corrispondono ai moti oscillatori hanno una struttura topologica diversa da quelle che corrispondono ai moti rotatori; ciò è particolarmente
evidente nella figura 4.7.4, la quale mostra come le curve di livello corrispondenti
ai valori e ∈ (−1, 1) sono riducibili con continuità a un punto, cosa che non risulta
possibile per quelle relative ai livelli e > 1, le quali sono avvolte al cilindro. Le
due famiglie di curve sono divise da quella corrispondente al livello critico e = 1
che è una separatrice.
La legge oraria dei moti di un pendolo si determina sostituendo nella (4.3.5)
l’espressione (4.7.3) dell’energia potenziale U . Poiché in tutti i moti non statici
il pendolo transita sempre per la posizione θ = 0, indicato con t0 l’istante in
cui avviene tale passaggio lo studio della legge oraria si riconduce in ogni caso al
calcolo di integrali del tipo
Z θ
dξ
r
t − t0 = ±
.
(4.7.5)
2
0
(E + mgR cos ξ)
mR2
Applicando la formula di duplicazione del coseno, dalla precedente relazione segue
r
Z θ
g
dα
r
2
(t − t0 ) =
.
(4.7.6)
R
1+e
α
0
− sin2
2
2
173
Si cominci col supporre e ∈ (−1, 1) (moti oscillatori); posto allora
r
a(E)
1+e
k=
= sin
,
2
2
è k ∈ (0, 1) e la (4.7.6) si scrive
r
Z θ
g
dα
r
(t − t0 ) =
2
R
α
0
k2 − sin2
2
(4.7.7)
(4.7.8)
Eseguendo in (4.7.8) il cambiamento di variabile da α a β con
α
= k sin β,
2
sin
si ottiene, in definitiva
r
g
(t − t0 ) =
R
ϕ
Z
0
dβ
p
1 − k2 sin2 β
(4.7.9)
dove, chiaramente,
θ
= k sin ϕ.
2
sin
La funzione
Z
ϕ
F(ϕ, k) =
0
(4.7.10)
dβ
p
1 − k2 sin2 β
(4.7.11)
si denomina integrale ellittico di prima specie di ampiezza ϕ e modulo k. Si tratta, per
ogni k ∈ (0, 1), di una funzione strettamente crescente, in quanto la funzione integranda
è positiva, e quindi invertibile. La sua inversa si denota am(t, k) e prende il nome di
funzione amplitudine.
In virtù di tali definizioni, invertendo la (4.7.9) si ottiene
r
ϕ = am
g
(t − t0 ), k
R
e dunque
r
sin ϕ = sn
g
(t − t0 ), k
R
dove
sn(t, k) = sin am(t, k)
(4.7.12)
è la funzione seno amplitudine. Infine, ricordando la (4.7.10), si perviene alla seguente
espressione della legge oraria per i moti oscillatori del pendolo:
r
g
θ(t) = 2 arcsin k sn
(t − t0 ), k
.
(4.7.13)
R
In figura 4.7.5 è mostrato l’andamento della legge oraria (4.7.13) per i valori di k in
corrispondenza a tre livelli di energia.
174
θ
t
Figura 4.7.5: moti oscillatori del pendolo.
Il periodo T di tali moti può calcolarsi a partire dall’espressione (4.7.5) della legge
oraria e vale
Z a(E)
Z σ
dα
dα
q
q
T =2
=4
2
2
−a(E)
0
(E + mgR cos α)
(E + mgR cos α)
mR2
mR2
con a(E) espresso dalla (4.7.4). D’altra parte, ponendo θ = a(E) in (4.7.10) e tenendo
presente la definizione di k, si ottiene per ϕ il valore π/2. Dalla (4.7.11) segue allora
r Z π
r
2
R
dβ
R π
p
F( , k).
T =4
=4
g 0
g
2
1 − m sin2 β
La funzione
Z
π
2
π
dβ
= F( , k)
(4.7.14)
2
2
2
1
−
k
sin
β
0
è detta integrale ellittico completo di prima specie. Si determina cosı̀ la relazione
r
R
K(m)
(4.7.15)
T =4
g
K(k) =
p
la quale, quando si tenga presente che è
r
r
1+e
mgR + E
k=
=
,
2
2mgR
fornisce la dipendenza funzionale del periodo dal livello d’energia.
L’integrale ellittico completo di prima specie K(k) è esprimibile sotto forma di serie
uniformemente convergente
"
#
2
+∞ X
(2n − 1)!!
π
2n
K(k) =
1+
k
,
2
(2n)!!
n=1
175
t
T0
a
π
4
Figura 4.7.6:
semiampiezza.
π
2
3
π
4
π
periodo dei moti oscillatori del pendolo in funzione della
cosicché si ha
r
T = 2π
"
#
2
+∞ X
(2n − 1)!!
R
2n
1+
k
.
g
(2n)!!
n=1
Il primo termine di tale serie, indipendente dall’energia, vale
r
T0 = 2π
R
g
e coincide con il periodo dei piccoli moti del pendolo attorno alla sua configurazione di
equilibrio A, e cioè delle oscillazioni armoniche soluzioni dell’equazione
θ̈ = −
g
θ
R
che si ottiene linearizzando la (4.7.2). La figura 4.7.6 pone a confronto il periodo esatto
con la sua approssimazione all’ordine 0 in funzione della semiampiezza a(E) del moto.
Appare evidente, sia pure nei limiti del dettaglio della figura, come effettivamente la
funzione T sia praticamente costante per valori non troppo grandi dell’ampiezza. In ciò
consiste l’isocronismo delle oscillazioni del pendolo scoperto dal giovane Galileo, ancora
studente, contemplando le oscillazioni di una lampada nel duomo di Pisa. In virtù del
Teorema 4.6.1 sappiamo che tale proprietà non è specifica del pendolo ma è comune a
tutti i sistemi che compiono oscillazioni di piccola ampiezza attorno a una posizione di
equilibrio stabile.
Torniamo alla (4.7.6) e supponiamo, stavolta, e ∈ (1, +∞) (moti rotatori); posto, in
questo caso,
r
2
k=
,
(4.7.16)
1+e
176
risulta ancora k ∈ (0, 1) e la (4.7.6) diventa
r
Z θ
g
q
2
(t − t0 ) =
R
0
dα
1
k2
− sin2
(4.7.17)
α
2
α
, la (4.7.17) assume la forma
2
r
Z θ/2
g t − t0
θ
dβ
p
=
=F
,k
R k
2
1 − k2 sin2 β
0
Introdotta la nuova variabile β =
da cui, invertendo, si determina la legge oraria dei moti rotatori del pendolo
r
g t − t0
θ = 2 am
,k
R k
(4.7.18)
il cui andamento è mostrato in figura ??.
Se, infine, è e = 1 (moto aperiodico), la (4.7.6) si scrive
r
Z θ
g
dα
q
(t − t0 ) =
R
0
1 − sin2 α2
da cui, posto ξ = sin
α
, si ricava
2
r
Z x
g
dξ
(t − t0 ) =
= settanh x
R
1
−
ξ2
0
(4.7.19)
con
θ
x = sin .
2
Invertendo la (4.7.19) si perviene cosı̀ alla legge oraria del moto unidirezionale
r
g
θ = 2 arcsin tanh
(t − t0 )
(4.7.20)
R
(figura 5.8).
In particolare, il periodo dei moti oscillatori è dato da
Z
a(E)
T =2
−a(E)
4.8
dξ
q
2
mR2 (E
.
+ mgR cos ξ)
Il pendolo in rotazione
Ad una interessante generalizzazione del pendolo semplice si perviene consentendo
al piano π, contenente la circonferenza γ su cui avviene il moto, di ruotare rispetto
a uno spazio inerziale con velocità angolare costante ω attorno all’asse verticale
contenente il centro di γ. Il sistema che in tal modo si costruisce possiede ancora
177
un sol grado di libertà, ma il vincolo non è più fisso, nello spazio inerziale, bensı̀
esplicitamente dipendente dal tempo.
Introduciamo nello spazio inerziale un riferimento {O, (e1 , e2 , e3 )} con origine
nel centro di γ, versore e3 diretto lungo la verticale discendente e versore e1 scelto
in modo che, all’istante t = 0, il piano π coincida con quello individuato da O, e1 e
e3 . Introduciamo ancora un riferimento, non inerziale, {O, (e01 , e02 , e3 )} a sua volta
scelto in modo che π si identifichi col piano individuato da O, e01 e e3 , di modo
che e02 sia costantemente perpendicolare alla circonferenza. Il moto del sistema
di riferimento mobile rispetto a quello inerziale è dunque rotatorio uniforme e la
velocità angolare si esprime nella forma
ω = ωe3 .
(4.8.1)
Nel riferimento inerziale il moto della particella è governato dall’equazione
mẍ = p + φ
nella quale
p = mge3
è il suo peso e φ la reazione vincolare esplicata dai dispositivi che la mantengono
sulla circonferenza. Per determinare l’equazione del moto nel riferimento non inerziale basta osservare che, in virtù della formula di Coriolis (1.12.9), la precedente
equazione può scriversi
ma0 = p + φ − maT − maC
(4.8.2)
in cui a0 è l’accelerazione della particella nel riferimento ruotante,
aC = 2ω × v 0
è l’accelerazione di Coriolis e aT è l’accelerazione di trascinamento la quale, dal
momemto che le origini dei riferimenti coincidono e lavelocità angolare è costante,
si riduce all’accelerazione centripeta
aT = ω × ω × x0 .
Il moto della particella avviene sulla curva di equazione parametrica
x0 = R(sin θe01 + cos θe3 )
e l’equazione differenziale per la determinazione della legge oraria si ottiene moltiplicando scalarmente la (4.8.2) per il vettore tangente
t = cos θe01 − sin θe3 .
178
Per quanto concerne il primo membro, la componente tangenziale dell’accelerazione è l’accelerazione scalare s̈ che, nel caso di una circonferenza, vale Rθ̈.
La componente tangenziale della forza peso vale
p · t = −mg sin θ
mentre quella della reazione vincolare è nulla in virtù dell’ipotesi di assenza di
attrito. Restano da determinare le componenti tangenziali dell’accelerazione di
trascinamento e di quella di Coriolis. Quest’ultima siannulla, poiché la velocità ha
direzione tangente alla curva:
aC · t = ω ṡ(e3 × t) · t = 0.
Tenendo poi conto delle espressioni di ω e di x0 si verifica infine che risulta
aT · t = (ω × ω × x0 ) · t = −ω 2 sin θ cos θ.
L’equazione differenziale per la determinazione del moto del pendolo ruotante è
pertanto
mRθ̈ = −mg sin θ + mω 2 sin θ cos θ
ovvero, assumendo per semplicità m = 1 e R = 1,
θ̈ = sin θ(−g + ω 2 cos θ).
(4.8.3)
La (4.8.3) è l’equazione del moto di un punto su una curva liscia sotto l’azione
di una forza posizionale di energia potenziale
1
U (θ) = −g cos θ − ω 2 sin2 θ.
2
(4.8.4)
L’andamento della funzione U è influenzato in maniera sostanziale dal valore
della costante ω, ovvero, più precisamente, da quello del rapporto g/ω 2 . Infatti,
si ha
U 0 (θ) = sin θ(g − ω 2 cos θ).
La derivata prima di U si annulla in ogni caso nei valori θ = 0 e θ = π, dove
pertanto si hanno due configurazioni di equilibrio. Se si ha g/ω 2 ≥ 1 queste sono
le sole configurazioni di equilibrio, laddove, se g/ω 2 risulta più piccolo dell’unità,
ne compaiono altre due, in corrispondenza dei valori θ = ± arccos(g/ω 2 ), simmetriche rispetto a θ = 0 e tanto più vicine a questa quanto più il rapporto g/ω 2
è prossimo ad 1. Le due configurazioni di equilibrio θ = 0 e θ = π sono quelle
in cui si annullano separatamente sia la componente tangenziale della forza peso
che quella della forza centripeta. Quando il piano contenente il pendolo è posto in
rotazione con una velocità angolare sufficientemente grande allora, per un opportuno valore dell’inclinazione θ rispetto alla direzione della verticale, le componenti
tangenziali della forza peso e della forza centrifuga si equilibrano; dal punto di
179
Figura 4.8.1: l’energia potenziale ed il ritratto di fase del pendolo ruotante per
diversi valori della velocità angolare.
180
vista dell’osservatore solidale al piano del pendolo questo appare allora essere in
equilibrio pur se inclinato rispetto alla verticale.
In figura 4.8.1 sono mostrati l’andamento della funzione U e degli insiemi di livello dell’energia in corrispondenza a tre valori di ω scelti in maniera che il rapporto
g/ω 2 risulti, rispettivamente, maggiore di 1, uguale ad 1 e minore di 1.
Lo studio della stabilità delle configurazioni di equilibrio appena determinatesi
presenta di grandissimo interesse. Come è facile controllare, si ha
U 00 (θ) = g cos θ + ω 2 (1 − 2 cos2 θ) = g cos θ − ω 2 cos 2θ
e dunque, in particolare,
U 00 (0) = g − ω 2 ,
U 00 (π) = −g − ω 2 .
Come si vede, la configurazione θ = π è sempre instabile; al contrario, la configurazione θ = 0 può essere stabile o instabile e ciò, ancora una volta, va posto in
relazione al valore che assume il rapporto g/ω 2 . Quando g/ω 2 ≥ 1 (ovvero ω 2 ≤ g)
si ha stabilità, mentre se è g/ω 2 < 1 (ω 2 > g) si ha instabilità. Infine, nelle due
configurazioni θ = ± arccos(g/ω 2 ) è
U 00 (± arccos
g2
ω2 + g 2
g
2
)
=
ω
−
=
(ω − g) > 0
ω2
ω2
ω2
e pertanto si ha stabilità. Sintetizzando quanto appena detto, possiamo affermare
che, per valori di ω 2 inferiori a g vi sono due configurazioni di equilibrio, delle quali
una stabile, per θ = 0, l’altra instabile, per θ = π. Quando ω 2 supera la soglia g, la
configurazione instabile resta tale; quella stabile diviene a sua volta instabile, ma
contemporaneamente compaiono ai suoi lati due nuove configurazioni di equilibrio
stabile.
La figura (4.8.2) illustra graficamente la situazione appena descritta; per ogni
valore della velocità angolare (più precisamente, del suo quadrato) sono riportate
in ordinata le coordinate delle configurazioni di equilibrio. Un tale grafico prende il
nome di diagramma di stabilità. Al variare del parametro ω 2 si determinano delle
curve che vengono tracciate con linea continua quando corrispondono a configurazioni di equilibrio stabile, con linea tratteggiata quando individuano configurazioni
instabili. Nel punto del piano (ω 2 , θ) di coordinate (g, 0) una curva, che descrive la
configurazione di equilibrio posta nell’origine delle coordinate curvilinee, si dirama
in tre curve; un tale punto si chiama punto di biforcazione.
181
θ
π
0
ω2
g
−π
Figura 4.8.2: diagramma di stabilità per il pendolo ruotante.
182