FONDAMENTI DI RIVELAZIONE RADAR
BERSAGLIO NON FLUTTUANTE - INTEGRAZIONE DEGLI IMPULSI (cont.)
Il rapporto segnale-rumore minimo (SNRmin) necessario per
effettuare la rivelazione di un oggetto con una assegnata
probabilità di corretta rivelazione PD , e una assegnata probabilità
di falso allarme Pfa inserito nella equazione del radar per
calcolare Rmax è riferito al singolo impulso ricevuto.
In realtà, un bersaglio viene osservato dal radar per un tempo
pari al dwell time td, e quindi si hanno a disposizione N impulsi
relativi allo stesso bersaglio.
CAP.3 – LUC.1/92
FONDAMENTI DI RIVELAZIONE RADAR
BERSAGLIO NON FLUTTUANTE - INTEGRAZIONE DEGLI IMPULSI (cont.)
Di solito questi N impulsi vengono elaborati opportunamente
(processo di integrazione degli impulsi).
L'operazione di integrazione degli impulsi è vantaggiosa dal punto
di vista del processo di decisione. Tale vantaggio viene
quantificato definendo un guadagno di integrazione Gint che va a
moltiplicare, nella equazione del radar, la potenza ricevuta per
singolo impulso.
L'equazione radar
4
Rmax
PT G 2 λ 2σ
Gint
=
3
(4π ) Smin
CAP.3 – LUC.2/92
FONDAMENTI DI RIVELAZIONE RADAR
BERSAGLIO NON FLUTTUANTE - INTEGRAZIONE DEGLI IMPULSI (cont.)
A parità di Rmax, il rapporto SNRmin è diminuito di un fattore pari a
Gint rispetto al caso di assenza di integrazione.
Si ha quindi la possibilità di una riduzione sulle specifiche relative ad
esempio alla potenza PT in emissione, al guadagno di antenna, etc..
Se in ricezione si hanno a disposizione N impulsi retrodiffusi dal
bersaglio occorre tenere conto:
a) delle perdite per elaborazione, quantificabili con un fattore di
perdita LE ,
b) di un guadagno di elaborazione Gint, derivante da un
processo di integrazione degli impulsi.
CAP.3 – LUC.3/92
FONDAMENTI DI RIVELAZIONE RADAR
BERSAGLIO NON FLUTTUANTE - INTEGRAZIONE DEGLI IMPULSI (cont.)
Si definisce un rapporto segnale - rumore minimo equivalente
SNRmeq
SNRmeq :
LE
=
SNRmin
Gint
in cui SNRmin è il minimo rapporto segnale rumore necessario per
PD e Pfa assegnate utilizzando un solo
la rivelazione con
impulso.
Rx
SNR1
Integratore
SNR2 =
Gint
SNR1
LE
CAP.3 – LUC.4/92
FONDAMENTI DI RIVELAZIONE RADAR
BERSAGLIO NON FLUTTUANTE - INTEGRAZIONE DEGLI IMPULSI (cont.)
La portata radar Rmax viene calcolata usando l'equazione radar in
cui al posto di SNR viene considerato SNRmeq . In queste ipotesi
min
SNRmeq può essere definito come il rapporto SNRmin associato ad un
singolo impulso equivalente che garantisce una certa PD ed una
certa Pfa . Esso tiene conto del fatto che si hanno N impulsi
associati al bersaglio in esame.
Affinché il processo di integrazione sia utile si deve avere
SNRmeq < SNRmin → Gint > LE
( es :
Gint = 13dB, LE = 1, 5dB )
CAP.3 – LUC.5/92
FONDAMENTI DI RIVELAZIONE RADAR
BERSAGLIO NON FLUTTUANTE - INTEGRAZIONE DEGLI IMPULSI
Si noti che di solito l'operazione di integrazione degli impulsi
avviene in banda base ossia sulle componenti I e Q nel caso di
elaborazione coerente, ovvero sul modulo in caso di ricezione non
coerente, e che il sottosistema che opera l'integrazione è di tipo
numerico.
Noto SNRmin è possibile risalire alla
PD
ed alla
Pfa
utilizzando i metodi della teoria della decisione che verranno
illustrati in seguito.
CAP.3 – LUC.6/92
FONDAMENTI DI RIVELAZIONE RADAR
CALCOLO DEL RAPPORTO SEGNALE/RUMORE SU SINGOLO IMPULSO (cont.)
Il calcolo del rapporto segnale/rumore su singolo impulso deve
essere inquadrato in due modi:
a) Risultato di un bilancio di potenza
b) Risultato di un calcolo analitico funzione di PD e Pfa assegnate.
Dai due risultati si ottiene il valore di SNRmin che soddisfa le
prestazioni richieste.
CAP.3 – LUC.7/92
FONDAMENTI DI RIVELAZIONE RADAR
CALCOLO DEL RAPPORTO SEGNALE/RUMORE SU SINGOLO IMPULSO (cont.)
Viene ora illustrata la procedura di calcolo del rapporto SNRmin
nella ipotesi in cui si abbia soltanto un singolo impulso per la
rivelazione. Dopo aver effettuato tale calcolo occorre ricordare che
se si hanno a disposizione N impulsi, il valore di SNRmin calcolato
va diminuito di una quantità pari al guadagno di integrazione Gint e
va aumentato di una quantità pari alle perdite per elaborazione LE.
Il calcolo del rapporto SNRmin
viene effettuato supponendo di
avere un bersaglio non fluttuante, ossia fisso. Un bersaglio è fisso
se la sua RCS non varia nel tempo.
CAP.3 – LUC.8/92
FONDAMENTI DI RIVELAZIONE RADAR
CALCOLO DEL RAPPORTO SEGNALE/RUMORE SU SINGOLO IMPULSO (cont.)
Si supponga, che il ricevitore radar sia in grado di estrarre dal
segnale ricevuto l'inviluppo della portante. Di solito un simile
ricevitore è costituito dalla cascata di un elemento non lineare (es.
un rivelatore lineare o quadratico) con un filtro passa basso.
x(t)
2
( )
2
x (t)
v(t)
Rivelatore quadratico di inviluppo
CAP.3 – LUC.9/92
FONDAMENTI DI RIVELAZIONE RADAR
CALCOLO DEL RAPPORTO SEGNALE/RUMORE SU SINGOLO IMPULSO (cont.)
Per decidere se il bersaglio è presente si confronta l'ampiezza del
segnale di inviluppo con una soglia VT opportunamente calcolata
in base ai valori di PD e Pfa fissati.
Esistono anche procedimenti di rivelazione basati su segnali
provenienti da un processo di demodulazione coerente. Il tipico
schema di un ricevitore coerente in grado di estrarre le
componenti in fase e in quadratura del segnale ricevuto.
CAP.3 – LUC.10/92
FONDAMENTI DI RIVELAZIONE RADAR
CALCOLO DEL RAPPORTO SEGNALE/RUMORE SU SINGOLO IMPULSO (cont.)
I(t) = A t cos ϕ t
A t cos ω0 t + ϕ t
cos ω0 t
sin ω0t
Q(t) = A t sin ϕ t
Rivelatore coerente (ω0 = pulsazione della portante)
CAP.3 – LUC.11/92
FONDAMENTI DI RIVELAZIONE RADAR
CALCOLO DEL RAPPORTO SEGNALE/RUMORE SU SINGOLO IMPULSO (cont.)
Se I e Q sono due segnali rappresentativi di un processo (rumore)
gaussiano bianco (bersaglio assente), la densità di probabilità al
primo ordine dell'inviluppo v(t) è di tipo Rayleigh
pv (v) =
v
σ
2
e
−
v2
2σ 2
U (v )
dove U(•) è il gradino unitario.
Il segnale di inviluppo v(t) nel caso di bersaglio assente è dato
dalla relazione
v (t ) = nx2 + n 2y
con nx ed ny: componenti in fase e quadratura
CAP.3 – LUC.12/92
FONDAMENTI DI RIVELAZIONE RADAR
CALCOLO DEL RAPPORTO SEGNALE/RUMORE SU SINGOLO IMPULSO (cont.)
La probabilità di falso allarme è pari a
Pfa = Prob v > VT bersaglio assente =
∫∫
f nx , ny ( x, y ) dxdy
x 2 + y 2 >VT
in cui VT è la tensione di soglia.
CAP.3 – LUC.13/92
FONDAMENTI DI RIVELAZIONE RADAR
CALCOLO DEL RAPPORTO SEGNALE/RUMORE SU SINGOLO IMPULSO (cont.)
Nel caso di rumore gaussiano la densità di probabilità della
componente di rumore in fase (nx) è
pn x ( x ) =
1
σ 2π
e
−
x2
2σ 2
ed analogamente per la componente in quadratura ny
Se il processo di rumore è bianco, le componenti nx(t) e ny(t) sono
statisticamente indipendenti e quindi si ha
2
2
+
n
n
1
x
y
−
Pfa =
exp
2
σ
2πσ 2 ∫∫
2
dnx dn y
CAP.3 – LUC.14/92
FONDAMENTI DI RIVELAZIONE RADAR
CALCOLO DEL RAPPORTO SEGNALE/RUMORE SU SINGOLO IMPULSO (cont.)
Indicando con
l'inviluppo e con
r = nx2 + n y2
θ = arctg
ny
nx
la fase, ed operando la trasformazione nx, ny → r, θ si ha:
Pfa =
2π ∞
1
2πσ
2
∫ ∫e
−r
2
2σ 2
rdrdθ
0 VT
CAP.3 – LUC.15/92
FONDAMENTI DI RIVELAZIONE RADAR
CALCOLO DEL RAPPORTO SEGNALE/RUMORE SU SINGOLO IMPULSO (cont.)
Pertanto:
Pfa = e
−
VT2
2σ 2
= 1 − F (VT )
dove F(v) è la funzione di distribuzione dell’ampiezza (inviluppo)
del rumore.
p(v)
PFA
VT
v
Quindi la probabilità di falso allarme è rappresentata dall'area
tratteggiata.
CAP.3 – LUC.16/92
FONDAMENTI DI RIVELAZIONE RADAR
CALCOLO DEL RAPPORTO SEGNALE/RUMORE SU SINGOLO IMPULSO (cont.)
Si osserva che se VT rimane costante e la deviazione standard σ
del processo di rumore aumenta, la probabilità di falso allarme
cresce molto rapidamente.
-6
Ad es. se si richiede Pfa=10
VT
σ
si ha
= −2 ln ( Pfa ) = 5.256
CAP.3 – LUC.17/92
FONDAMENTI DI RIVELAZIONE RADAR
CALCOLO DEL RAPPORTO SEGNALE/RUMORE SU SINGOLO IMPULSO (cont.)
Se la σ del rumore cresce del 20% si ha
Pfa = e
− 5.256
2
( 2⋅1.44 )
≈ 6.8 ⋅ 10 −5
e quindi la Pfa è aumentata di 68 volte rispetto al valore
precedente a fronte di un aumento di 1.58 dB della potenza di
rumore.
Di conseguenza occorre che il controllo del rapporto VT/σ sia
molto accurato.
CAP.3 – LUC.18/92
FONDAMENTI DI RIVELAZIONE RADAR
CALCOLO DEL RAPPORTO SEGNALE/RUMORE SU SINGOLO IMPULSO (cont.)
Si supponga ora che il bersaglio sia presente, sia fisso e di
operare la decisione sull'inviluppo del singolo impulso ricevuto.
Quando il bersaglio è presente,
il segnale di inviluppo non è
generato soltanto dalle componenti del segnale di disturbo ma
anche dalle componenti del segnale utile.
I (t ) = sI (t ) + nI (t )
Q (t ) = sQ (t ) + nQ (t )
Se il bersaglio è fisso le componenti del segnale utile non sono
aleatorie.
CAP.3 – LUC.19/92
FONDAMENTI DI RIVELAZIONE RADAR
CALCOLO DEL RAPPORTO SEGNALE/RUMORE SU SINGOLO IMPULSO (cont.)
Si supponga che il vettore S sia caratterizzato da una ampiezza di
picco A.
nQ = n y
V
S = (s I + jsQ )
nx = nI
Componenti del segnale ricevuto
Se il bersaglio fosse in movimento il vettore S ruoterebbe con una
velocità angolare proporzionale alla frequenza Doppler fd.
CAP.3 – LUC.20/92
FONDAMENTI DI RIVELAZIONE RADAR
CALCOLO DEL RAPPORTO SEGNALE/RUMORE SU SINGOLO IMPULSO (cont.)
Un parametro che caratterizza la situazione è il rapporto
Aeff
σ ,
in cui Aeff è la tensione RMS del segnale che per definizione è pari
a
A
2 . Di solito al posto del parametro Aeff si utilizza il rapporto
segnale rumore dato da
A2
SNR =
2σ 2
La presenza del fattore 2 giustifica il fatto che A è una ampiezza di
picco.
CAP.3 – LUC.21/92
FONDAMENTI DI RIVELAZIONE RADAR
CALCOLO DEL RAPPORTO SEGNALE/RUMORE SU SINGOLO IMPULSO (cont.)
ny
y=Q
S
nx
x=I
s x = sI = A cos θ
s y = sQ = A sin θ
e di conseguenza le componenti del vettore V associato al segnale ricevuto
(somma vettoriale del segnale utile e del rumore) hanno l'espressione
vx = I = A cos θ + nI = A cos θ + nx
v y = Q = A sin θ + nQ = A sin θ + n y
CAP.3 – LUC.22/92
FONDAMENTI DI RIVELAZIONE RADAR
CALCOLO DEL RAPPORTO SEGNALE/RUMORE SU SINGOLO IMPULSO (cont.)
Siccome il valore di A è deterministico (poiché il bersaglio è fisso),
dal punto di vista statistico le componenti del vettore V sono
variabili aleatorie gaussiane ma a valor medio non nullo a causa
della presenza di A. In queste ipotesi la densità di probabilità
congiunta di v
x
e vy è gaussiana a valor medio non nullo. Di
conseguenza
PD = Prob v > VT bersaglio presente =
∫∫
v >VT
f vx ,vy ( x, y ) dxdy
in cui v è l’inviluppo del segnale, e le componenti vx e vy non sono
più indipendenti (il calcolo si complica).
CAP.3 – LUC.23/92
FONDAMENTI DI RIVELAZIONE RADAR
CALCOLO DEL RAPPORTO SEGNALE/RUMORE SU SINGOLO IMPULSO (cont.)
Occorre
ricordare
l’espressione
della
funzione
di
Bessel
modificate di ordine zero I0(α):
1
I0 (α ) =
2π
2π
α cosθ
e
dθ
∫
0
la quale, si ricorda, ammette lo sviluppo in serie:
α
I 0 (α ) = 1 + ∑ k
2
k
!
⋅
k =1
∞
k
2
CAP.3 – LUC.24/92
FONDAMENTI DI RIVELAZIONE RADAR
CALCOLO DEL RAPPORTO SEGNALE/RUMORE SU SINGOLO IMPULSO (cont.)
Siccome la densità congiunta delle componenti di V è
( v − A cos θ )2 + ( v − A sin θ )2
1
x
y
=
−
p ( vx , v y ) =
exp
2πσ 2
2σ 2
vx2 + v 2y + A2 − 2vx A cosθ − 2v y A sin θ
=
exp −
2
2
2πσ
2σ
1
CAP.3 – LUC.25/92
FONDAMENTI DI RIVELAZIONE RADAR
CALCOLO DEL RAPPORTO SEGNALE/RUMORE SU SINGOLO IMPULSO (cont.)
operando la trasformazione
vx , v y → r , ϕ
si ha la densità
congiunta dell’inviluppo r e dell’argomento:
r 2 + A2 − 2 A(r cos ϕ cos θ + r sin ϕ sin θ )
p ( r,ϕ ) =
exp −
=
2
2πσ 2
2
σ
r
r 2 + A2 − 2 Ar cos (ϕ − θ )
exp −
=
2
2
2πσ
2σ
r
da cui
r 2 + A2 2π
Ar
−
−
p (r ) =
dϕ
exp
exp
cos
ϕ
θ
(
)
∫
2
2
2
2πσ
2σ 0
σ
r
CAP.3 – LUC.26/92
FONDAMENTI DI RIVELAZIONE RADAR
CALCOLO DEL RAPPORTO SEGNALE/RUMORE SU SINGOLO IMPULSO (cont.)
Ricordando la definizione di I0(x) si ha:
r 2 + A2
p (r ) = 2 exp −
2
2
σ
σ
r
Ar
I0 2 U (r )
σ
è chiamata densità di probabilità di tipo RICE o Riceana.
Per definizione
∞
PD =
∫ p(r )dr = Q(V
T
)
VT
Per A2 >> σ2 la densità di Rice è circa gaussiana con valore atteso
A e varianza σ2; l’approssimazione è già buona per A > 5σ.
CAP.3 – LUC.27/92
FONDAMENTI DI RIVELAZIONE RADAR
CALCOLO DEL RAPPORTO SEGNALE/RUMORE SU SINGOLO IMPULSO (cont.)
∞
PD =
∫ p(r )dr = Q(V
T
)
VT
non è esprimibile in forma chiusa ed è
denominata funzione di Marcum. Essa fornisce la probabilità di
corretta rivelazione.
Può far comodo esprimere la PD in funzione della Pfa. Sfruttando la
Pfa = e
−
VT2
2σ 2
= 1 − F (VT )
si può scrivere che
VT
σ 2
= − ln ( Pfa )
CAP.3 – LUC.28/92
FONDAMENTI DI RIVELAZIONE RADAR
CALCOLO DEL RAPPORTO SEGNALE/RUMORE SU SINGOLO IMPULSO (cont.)
Se si pone
x=
r
2σ
A2
SNR =
2σ 2
⇒
PD = 2e− SNR
∞
∫
( )
(
) (
)
x ⋅ exp − x 2 I0 2 SNRx dx
− ln Pfa
L'espressione è importante poiché mette in relazione PD e Pfa.
CAP.3 – LUC.29/92
FONDAMENTI DI RIVELAZIONE RADAR
CALCOLO DEL RAPPORTO SEGNALE/RUMORE SU SINGOLO IMPULSO (cont.)
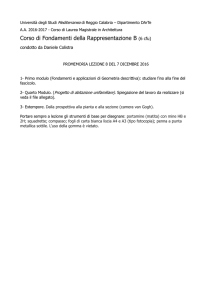
Se si fissa la Pfa, noto il rapporto segnale rumore è possibile
ottenere la PD attraverso la funzione di Marcum. Di solito la
funzione di Marcum viene graficata in funzione del rapporto
segnale rumore al variare della Pfa.
Di solito tali curve sono parametrate sulla Pfa.
CAP.3 – LUC.30/92
FONDAMENTI DI RIVELAZIONE RADAR
CALCOLO DEL RAPPORTO SEGNALE/RUMORE SU SINGOLO IMPULSO
Probabilità di rivelazione in funzione del rapporto segnale-rumore (funzione di Marcum)
CAP.3 – LUC.31/92
FONDAMENTI DI RIVELAZIONE RADAR
BERSAGLI FLUTTUANTI E MODELLI DI SWERLING (SINGOLO IMPULSO)
La sezione trasversa di back-scattering (RCS) di un oggetto non
sferico e in movimento rispetto al radar deve essere considerata
variabile nel tempo a causa ad es. delle continue variazioni di
assetto del bersaglio. Le variazioni della RCS possono essere
tenute in conto trattando la RCS come un processo stocastico.
La caratterizzazione completa di un processo stocastico richiede
la conoscenza delle densità di probabilità congiunte di ogni
ordine. Siccome non si hanno a disposizione tali dati, ci si limita a
considerare una descrizione stocastica del fenomeno basata sui
momenti del primo e del secondo ordine (medie e funzioni di
correlazione).
CAP.3 – LUC.32/92
FONDAMENTI DI RIVELAZIONE RADAR
BERSAGLI FLUTTUANTI E MODELLI DI SWERLING (SINGOLO IMPULSO)
Modelli della RCS per un sistema discreto di diffusori (cont.)
3
5
4
4
1
T
2
2
1
Caratterizzazione dell’oggetto mediante scatteratori elementari (N = 5)
2
4π
δi
λ
k =1
2
in cui |v| è la potenza riemessa, k è la costante che proviene dalla
equazione radar.
σ = v 2 (t ) k =
N
∑ α i exp j
CAP.3 – LUC.33/92
FONDAMENTI DI RIVELAZIONE RADAR
BERSAGLI FLUTTUANTI E MODELLI DI SWERLING (SINGOLO IMPULSO)
Modelli della RCS per un sistema discreto di diffusori (cont.)
RCS di un sistema costituito da 5 scatteratori: diagramma polare
CAP.3 – LUC.34/92
FONDAMENTI DI RIVELAZIONE RADAR
BERSAGLI FLUTTUANTI E MODELLI DI SWERLING (SINGOLO IMPULSO)
Modelli della RCS per un sistema discreto di diffusori (cont.)
RCS di un sistema costituito da 5 scatteratori: istogramma
CAP.3 – LUC.35/92
FONDAMENTI DI RIVELAZIONE RADAR
BERSAGLI FLUTTUANTI E MODELLI DI SWERLING (SINGOLO IMPULSO)
Modelli della RCS per un sistema discreto di diffusori (cont.)
Per avere un idea dell'entità della variazione della RCS σ, si
consideri un caso semplice in cui si hanno solo due scatteratori
(N = 2). Si supponga inoltre che i due elementi scatteranti siano
identici e non interagenti, in campo lontano.
δ = l ⋅ sin(θ ) per cui la differenza di fase è pari a
∆ϕ =
∆ϕ = ϕ 2 − ϕ1 =
4πδ
λ
4π
l sin θ
λ
1
l
2
Sistema costituito da due scatteratori
CAP.3 – LUC.36/92
FONDAMENTI DI RIVELAZIONE RADAR
BERSAGLI FLUTTUANTI E MODELLI DI SWERLING (SINGOLO IMPULSO)
Modelli della RCS per un sistema discreto di diffusori (cont.)
a
a
2
A
a
a
∆ϕ
A/2
a2
A
4π
cos
sin
=
1
+
l
θ
2
λ
2
Composizione vettoriale dei due contributi che raggiungono il radar
Se l'ampiezza dei due contributi vale a e lo sfasamento tra i due è
pari a ∆ϕ il modulo del vettore somma A è
2
a2
A
2
2 ∆ϕ
=
= a cos
2
2
2
∆ϕ
+
cos
1
2
2
2
l
a
=
+
cos
π
sin
θ
1
4
λ
2
CAP.3 – LUC.37/92
FONDAMENTI DI RIVELAZIONE RADAR
BERSAGLI FLUTTUANTI E MODELLI DI SWERLING (SINGOLO IMPULSO)
Modelli della RCS per un sistema discreto di diffusori (cont.)
La RCS complessiva è
σ TOT
4π l
sin θ
= 2σ 1 1 + cos
λ
Per θ = 0 si ha σtot=4σ1.
Se
sin θ =
che, equivale a
λ
4l
θ = λ 4l ,
si ha:
4π l
λ
sin θ = π
da cui σ TOT = 0 .
CAP.3 – LUC.38/92
FONDAMENTI DI RIVELAZIONE RADAR
BERSAGLI FLUTTUANTI E MODELLI DI SWERLING (SINGOLO IMPULSO)
Modelli della RCS per un sistema discreto di diffusori (cont.)
σ TOT
4σ 1
4
0
sinθ
sin
λ
4l
λ
2l
3λ
4l
5λ
4l
1
Andamento della σTOT di due diffusori isotropici eguali a distanza l
CAP.3 – LUC.39/92
FONDAMENTI DI RIVELAZIONE RADAR
BERSAGLI FLUTTUANTI E MODELLI DI SWERLING (SINGOLO IMPULSO)
Modelli della RCS per un sistema discreto di diffusori (cont.)
In generale il numero di lobi nel semipiano
ν=
2
λ
2l
=
4l
λ
Il fattore due tiene conto del fatto che sinθ assume valori
tra -1 e 1. La larghezza del lobo è pari a λ/2l.
Se ad es. l = 5λ si ha v = 20 e l'oggetto ha dimensioni dell'ordine
delle centinaia di λ, per ogni coppia di scatteratori si avranno
centinaia di lobi.
CAP.3 – LUC.40/92
FONDAMENTI DI RIVELAZIONE RADAR
BERSAGLI FLUTTUANTI E MODELLI DI SWERLING (SINGOLO IMPULSO)
Modelli della RCS per un sistema discreto di diffusori
Andamento della RCS per due diffusori eguali: (a) l = λ, (b) l =2λ, (c) l = 4λ
CAP.3 – LUC.41/92
FONDAMENTI DI RIVELAZIONE RADAR
BERSAGLI FLUTTUANTI E MODELLI DI SWERLING (SINGOLO IMPULSO)
Modelli di RCS per oggetti complessi (cont.)
Andamento della RCS di un aereo B-26 per λ= 10 cm
CAP.3 – LUC.42/92
FONDAMENTI DI RIVELAZIONE RADAR
BERSAGLI FLUTTUANTI E MODELLI DI SWERLING (SINGOLO IMPULSO)
Modelli di RCS per oggetti complessi (cont.)
(in dB below
45)
b
0
a
a
=45°
-10
-20
-30
-40
-20
-10
0
10
20
30
40
50
60
70
80
90
100
110
(degrees)
Andamento della RCS per un corner reflector
CAP.3 – LUC.43/92
FONDAMENTI DI RIVELAZIONE RADAR
BERSAGLI FLUTTUANTI E MODELLI DI SWERLING (SINGOLO IMPULSO)
Modelli di RCS per oggetti complessi (cont.)
Un altro parametro importante al quale è legato l'andamento della
RCS è la polarizzazione dell'onda e.m. che incide sull'oggetto. Ciò
vale per tutti gli oggetti tranne che per la sfera.
TX
V
V
H
H
RX
H
V
H
V
Combinazioni delle polarizzazioni in
trasmissione e ricezione
CAP.3 – LUC.44/92
FONDAMENTI DI RIVELAZIONE RADAR
BERSAGLI FLUTTUANTI E MODELLI DI SWERLING (SINGOLO IMPULSO)
Modelli di RCS per oggetti complessi (cont.)
Un oggetto di forma complicata come ad es. un aeroplano può
anche dare luogo a riflessioni multiple del segnale incidente
Riflessioni multiple da un aereo
I contributi alla potenza retrodiffusa prodotti dalle riflessioni
multiple possono essere di notevole entità e quindi la RCS può
anche essere molto elevata. In generale questi tipi di riflessioni
multiple possono essere riflessioni a due o tre o quattro “rimbalzi”.
CAP.3 – LUC.45/92
FONDAMENTI DI RIVELAZIONE RADAR
BERSAGLI FLUTTUANTI E MODELLI DI SWERLING (SINGOLO IMPULSO)
Modelli di RCS per oggetti complessi
Un modo conveniente per caratterizzare la RCS di un generico bersaglio,
consiste nel considerarla come un processo stocastico, visto che i modelli
e.m. possono essere estremamente complicati. A volte però ciò può
portare ad approssimazioni anche grossolane.
I modelli stocastici più utilizzati sono i quattro Modelli di Swerling. Essi
qualificano la variazione nel tempo della RCS assegnando a questa una
funzione di densità di probabilità al primo ordine e un andamento della
funzione di correlazione che decresce rapidamente (o lentamente)
rispetto alle costanti di tempo in gioco (come il dwell time td e il tempo
di scansione Ts ).
CAP.3 – LUC.46/92
FONDAMENTI DI RIVELAZIONE RADAR
BERSAGLI FLUTTUANTI E MODELLI DI SWERLING (SINGOLO IMPULSO)
Modelli di Swerling (1° e 2°) (cont.)
Nei modelli Swerling1 e Swerling2 si assume che la RCS σ sia
caratterizzata da una densità di probabilità di tipo esponenziale
p (σ ) =
1
σ0
e
−
σ
σ0
U (σ )
in cui σ0 è il valore medio della RCS.
Nel modello Swerling1 si assume che l'andamento della RCS
all'interno del dwell time sia fortemente correlato (fluttuazione
della RCS lenta). Al contrario nel modello Swerling2 si suppone
che la RCS presenti un andamento fortemente decorrelato
all'interno del dwell time (fluttuazione rapida della RCS).
CAP.3 – LUC.47/92
FONDAMENTI DI RIVELAZIONE RADAR
BERSAGLI FLUTTUANTI E MODELLI DI SWERLING (SINGOLO IMPULSO)
Modelli di Swerling (1° e 2°) (cont.)
SW 1
SW 3
(a)
tD
SW 2
SW 4
t
(b)
tD
t
Andamento della ampiezza, che mostra la diversa correlazione
tra impulso ed impulso nei modelli di Swerling:
(a) 1 e 3, correlazione unitaria (b) 2 e 4, scorrelazione
CAP.3 – LUC.48/92
FONDAMENTI DI RIVELAZIONE RADAR
BERSAGLI FLUTTUANTI E MODELLI DI SWERLING (SINGOLO IMPULSO)
Modelli di Swerling (1° e 2°) (cont.)
SW 1
SW 3
SW 2
SW 4
t
tD
(a)
TSCAN
(a)
t
tD
(b)
TSCAN
Andamento tipico, da scansione a scansione, nei modelli di Swerling:
(a) Swerling1 (o 3), (b) Swerling2 (o 4)
CAP.3 – LUC.49/92
FONDAMENTI DI RIVELAZIONE RADAR
BERSAGLI FLUTTUANTI E MODELLI DI SWERLING (SINGOLO IMPULSO)
Modelli di Swerling (1° e 2°) (cont.)
Considerando
il
bersaglio
costituito
da
numerosi
diffusori
indipendenti per il teorema del limite centrale la sua eco
complessa ha componenti in fase e quadratura (I e Q) gaussiane
a valor medio nullo e con eguale varianza e indipendenti. Pertanto
l'ampiezza
A= I +Q
2
2
è distribuita secondo la Rayleigh e il suo quadrato che è
proporzionale alla RCS è distribuito in modo esponenziale.
CAP.3 – LUC.50/92
FONDAMENTI DI RIVELAZIONE RADAR
BERSAGLI FLUTTUANTI E MODELLI DI SWERLING (SINGOLO IMPULSO)
Modelli di Swerling (1° e 2°)
Per i modelli Swerling3 e Swerling4 (SW3 e SW4) si ripete il discorso
fatto per i modelli SW1 e SW2 ma la funzione di densità del primo
ordine della RCS è pari a
p (σ ) =
4σ
σ
2
0
e
− 2σ
σ0
U (σ )
Il modello SW3 è a fluttuazione lenta mentre SW4 è a fluttuazione
rapida; il termine “rapida” indica una costante di tempo ben più piccola
del dwell time. Per completezza si considera anche il modello di
Swerling relativo al bersaglio fisso convenzionalmente indicato come
Swerling5 (SW5) o Swerling0 (SW0).
CAP.3 – LUC.51/92
FONDAMENTI DI RIVELAZIONE RADAR
BERSAGLI FLUTTUANTI E MODELLI DI SWERLING (SINGOLO IMPULSO)
Probabilità di rivelazione per bersagli fluttuanti (cont.)
Sia
A2
s = SNR =
2σ n2
il rapporto segnale/rumore associato all'eco di ampiezza di valore
efficace
A
2 del bersaglio; σn è il valore efficace della tensione
di rumore. Nelle ipotesi di bersaglio fisso la probabilità di corretta
rivelazione è pari a
PD = PD ( s ) = 2e
−s
∞
∫
( )
x⋅e
− x2
(
)
⋅ I 0 2 sx dx
− ln Pfa
CAP.3 – LUC.52/92
FONDAMENTI DI RIVELAZIONE RADAR
BERSAGLI FLUTTUANTI E MODELLI DI SWERLING (SINGOLO IMPULSO)
Probabilità di rivelazione per bersagli fluttuanti (cont.)
Se la RCS del bersaglio non è costante ma varia secondo un modello di
Swerling, nota la probabilità di corretta rivelazione PD condizionata ad
un valore di s, PD(s), e la densità di probabilità della variabile s, p(s), per
definizione la probabilità di corretta rivelazione è data dalla relazione
∞
∫
PD = PD ( s) p( s)ds
0
Se si impiegano i modelli SW1 e SW2 si ha che
s
s0
1
p(s) = e U (s)
s0
in cui s0 è il valore medio del SNR.
−
CAP.3 – LUC.53/92
FONDAMENTI DI RIVELAZIONE RADAR
BERSAGLI FLUTTUANTI E MODELLI DI SWERLING (SINGOLO IMPULSO)
Probabilità di rivelazione per bersagli fluttuanti (cont.)
Nel caso di bersagli SW1 e SW2 esiste una procedura più agevole.
I segnali presenti sulle componenti in fase e quadratura sono dati dalla
somma delle tensioni vI(t) e vQ(t) associate al segnale di eco prodotto dal
bersaglio (supposto ad es. di tipo SW2) con due segnali nI(t) e nQ(t),
rappresentativi di un processo di rumore additivo supposto gaussiano.
I (t ) = vI (t ) + nI (t )
Q (t ) = vQ (t ) + nQ (t )
Se il bersaglio segue un modello di tipo SW2 la statistica dei segnali vI e
vQ è anch'essa gaussiana (infatti i modelli SW1 e SW2 si applicano a
bersagli complessi con numerosi diffusori), e l'inviluppo dei segnali è
Rayleigh.
CAP.3 – LUC.54/92
FONDAMENTI DI RIVELAZIONE RADAR
BERSAGLI FLUTTUANTI E MODELLI DI SWERLING (SINGOLO IMPULSO)
Probabilità di rivelazione per bersagli fluttuanti (cont.)
Le grandezze I e Q sono ancora variabili gaussiane con varianze
pari a
σ s2
SNR = 2
σn
σ I2 = σ Q2 = σ s2 + σ n2 = σ n2 ( 1 + SNR )
Detto v(t) il segnale di inviluppo
v ( t ) = I 2 ( t ) + Q2 ( t )
la densità di probabilità associata all'inviluppo v(t) è di tipo
Rayleigh
v2
p ( v ) = 2 exp − 2
σ
2σ
v
U ( v )
2
2
2
σ
=
σ
+
σ
s
n .
in cui
CAP.3 – LUC.55/92
FONDAMENTI DI RIVELAZIONE RADAR
BERSAGLI FLUTTUANTI E MODELLI DI SWERLING (SINGOLO IMPULSO)
Probabilità di rivelazione per bersagli fluttuanti (cont.)
Applicando la definizione di
VT2
PD = exp − 2
2σ n ( 1 + SNR )
VT2
Pfa = exp −
2
2σ n
Sostituendo
1
ln ( Pfa )
1+ SNR
= Pfa
PD = exp
1 + SNR
ln ( Pfa )
ln ( PD )
= 1 + SNR
CAP.3 – LUC.56/92
FONDAMENTI DI RIVELAZIONE RADAR
BERSAGLI FLUTTUANTI E MODELLI DI SWERLING (SINGOLO IMPULSO)
Probabilità di rivelazione per bersagli fluttuanti (cont.)
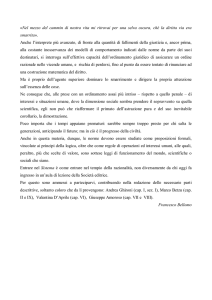
PD = Probabilità di rivelazione (%)
Andamento
qualitativo della
probabilità di
rivelazione per
bersaglio Swerling1 e
per bersaglio non
fluttuante
(integrazione di 10
impulsi)
100
80
60
Bersaglio
Swerling1
40
Bersaglio
fisso
20
Da tali curve è possibile ricavare
il valore del rapporto SNRmin
necessario per calcolare la portata
radar.
Tali
curve
sono
equivalenti, come scopo, alle
curve di Marcum già viste nel
caso di bersaglio fisso.
10
8
6
4
2
1
SNR (dB)
-8
-4
0
4
8
12
CAP.3 – LUC.57/92
FONDAMENTI DI RIVELAZIONE RADAR
BERSAGLI FLUTTUANTI E MODELLI DI SWERLING (SINGOLO IMPULSO)
Probabilità di rivelazione per bersagli fluttuanti (cont.)
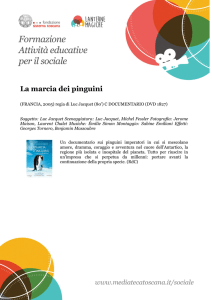
Incremento del SNR su singolo impulso, dB
20
Incremento dello SNR
necessario per rivelare un
bersaglio fluttuante rispetto al
bersaglio fisso
15
Swerling
1e2
10
(P
fa
5
0
0.05 0.1
0.2 0.3
0.5
0.7 0.8
0.9 0.95
)
A parità di PD (in particolare per
PD= 0.9), nel caso di un bersaglio
SW1 si deve incrementare il SNRmin-fisso
di una quantità ∆SNRmin= 7.5dB.
Swerling
3e4
-5
0.01
= 10 −6 ÷ 10 −10
0.99
Probabilità di rivelazione
CAP.3 – LUC.58/92
FONDAMENTI DI RIVELAZIONE RADAR
BERSAGLI FLUTTUANTI E MODELLI DI SWERLING (SINGOLO IMPULSO)
Probabilità di rivelazione per bersagli fluttuanti
fs (SNR)
1: “basso” SNR medio
SNR
PD
1
s1
s2
SNR
Andamento tipico della probabilità di detezione al variare dello SNR (curva inferiore)
e densità di probabilità di SNR (curve superiori)
CAP.3 – LUC.59/92
FONDAMENTI DI RIVELAZIONE RADAR
BERSAGLI FLUTTUANTI E MODELLI DI SWERLING (SINGOLO IMPULSO)
Caratterizzazione statistica della RCS (cont.)
La potenza del segnale ricevuto, a meno di un fattore costante
proveniente dalla equazione radar, è pari a
p (t ) = I 2 (t ) + Q 2 (t )
Per definizione la tensione del segnale di inviluppo v(t) relativo all'eco
ricevuto è pari a
v( t ) =
p( t ) = σ
a meno di una costante moltiplicativa.
CAP.3 – LUC.60/92
FONDAMENTI DI RIVELAZIONE RADAR
BERSAGLI FLUTTUANTI E MODELLI DI SWERLING (SINGOLO IMPULSO)
Caratterizzazione statistica della RCS (cont.)
La densità di probabilità pv(v) del segnale v(t) è legata alla densità della
RCS, pΣ (σ ) attraverso la relazione (trasformazione di variabili
aleatorie y = g ( x ) con g ( x ) = x ):
pv ( v ) = pΣ (σ = v
2
)
1
= pΣ ( v 2 ) 2v
dv dσ
Assegnata la pv(v) è possibile ricavare la funzione pΣ(σ) attraverso la
relazione
(
pΣ (σ ) = pv v = σ
)
dv (σ )
dσ
= pv
( )2
σ
1
σ
CAP.3 – LUC.61/92
FONDAMENTI DI RIVELAZIONE RADAR
BERSAGLI FLUTTUANTI E MODELLI DI SWERLING (SINGOLO IMPULSO)
Caratterizzazione statistica della RCS (cont.)
Ad es. se
1
σ
pΣ (σ ) =
exp −
σ0
σ0
U (σ )
v2
pv ( v ) =
exp −
σ0
σ0
U ( v )
2v
2
che è una espressione Rayleigh con σ0 = 2σn .
2
Per i modelli SW1 e SW2, 2σn è pari alla potenza del segnale.
CAP.3 – LUC.62/92
FONDAMENTI DI RIVELAZIONE RADAR
BERSAGLI FLUTTUANTI E MODELLI DI SWERLING (SINGOLO IMPULSO)
Caratterizzazione statistica della RCS (cont.)
Alcuni modelli di RCS vengono ricavati approssimando un bersaglio
generico con un insieme di N elementi scatteranti. La potenza del segnale
di eco, e quindi la RCS y, è pari a
y = x12 + x22 + ... + xN2
in cui xi sono variabili gaussiane. Se esse hanno valor medio nullo e la
stessa varianza, la funzione di densità di probabilità della RCS y ha
l'espressione
fy ( y) =
(σ
N − 1)
(
y 2
n
y
exp
− 2 U ( y )
N
2σ n
2 Γ ( N 2)
)
in cui σn2 è la varianza associata alla singola variabile gaussiana.
Si osserva che se N è un numero pari, N = 2m, si ottiene una funzione di
densità esponenziale se si pone m = 1. Se invece si pone m = 2 si ottiene
la funzione di densità relativa ai modelli SW3 e SW4.
CAP.3 – LUC.63/92
FONDAMENTI DI RIVELAZIONE RADAR
BERSAGLI FLUTTUANTI E MODELLI DI SWERLING (SINGOLO IMPULSO)
Caratterizzazione statistica della RCS (cont.)
fy ( y) =
La
(σ
N − 1)
(
y 2
n
y
exp − 2 U ( y )
N
2σ n
2 Γ ( N 2)
)
può essere estesa ad un parametro m qualsiasi (non intero) e si
ha
fy ( y) =
(σ
y
exp − 2 U ( y )
2m
2σ n
2 Γ ( m)
y m −1
n
)
Per bersagli aeromobili i valori tipici di m sono 0.9 < m < 2 mentre
per satelliti o cilindri sono dell'ordine di 0.3 < m < 2.
CAP.3 – LUC.64/92
FONDAMENTI DI RIVELAZIONE RADAR
BERSAGLI FLUTTUANTI E MODELLI DI SWERLING (SINGOLO IMPULSO)
Caratterizzazione statistica della RCS
Esistono altri modelli come quello proposto da RICE in cui si
ipotizza di avere un oggetto in cui sia identificabile un elemento
diffondente principale circondato da tanti piccoli diffusori casuali.
Un altro modello è quello Log-Normale; la legge Log-Normale si
ottiene calcolando l'esponenziale di una variabile gaussiana che
abbia valor medio positivo. Una RCS y di tipo log-normale ha
densità:
2
ln
y
µ
−
(
)
1
f ( y) =
exp −
U ( y )
2
2sd
sd ⋅ y ⋅ 2π
con:
sd = deviazione standard del logaritmo di y
µ = valore atteso del logaritmo di y
CAP.3 – LUC.65/92
FONDAMENTI DI RIVELAZIONE RADAR
BERSAGLI FLUTTUANTI E MODELLI DI SWERLING (SINGOLO IMPULSO)
La tecnologia
STEALTH e le relative contromisure (cont.)
Con il termine inglese stealth ( lett. azione furtiva, l’essere furtivo,
clandestinità ) si intende la tecnologia militare che ha come scopo
quello di rendere un aereo o un missile "quasi invisibile" al radar
nemico o a qualsiasi altra forma di rivelazione (elettronica,
termica, ect.).
CAP.3 – LUC.66/92
FONDAMENTI DI RIVELAZIONE RADAR
BERSAGLI FLUTTUANTI E MODELLI DI SWERLING (SINGOLO IMPULSO)
La tecnologia
STEALTH e le relative contromisure
Alla base della capacità di un aereo o di un missile stealth di evadere le
contromisure difensive del nemico vi è la combinazione degli effetti dovuti a
materiali particolari e di un’adeguata forma dell’oggetto.
La riflessione dell’eco radar da parte di un Bombardiere Stealth B-2 disposto
frontalmente è pari a –40 dBm2 cioè 10-4 m2 .
Il nuovo aereo JSF ( Joint Strike Fighter) viene visto con una RCS (Radar
Cross Section) leggermente superiore, circa –30 dBm2.
Il nuovo F/A-18E/F della Marina ha un RCS di
+1 dBm2, mentre il
bombardiere della precedente generazione, il noto B-52, ha RCS di +40 dBm2.
Le tecniche per ridure la RCS di un aeromobile (o di un'imbarcazione) si
basano (a) sui materiali, e (b) sulla forma.
CAP.3 – LUC.67/92
FONDAMENTI DI RIVELAZIONE RADAR
BERSAGLI FLUTTUANTI E MODELLI DI SWERLING (SINGOLO IMPULSO)
Punti che contribuiscono alla RCS di un aereo e tecniche per
ridurre la RCS agendo sulla forma
CAP.3 – LUC.68/92
FONDAMENTI DI RIVELAZIONE RADAR
BERSAGLI FLUTTUANTI E MODELLI DI SWERLING (SINGOLO IMPULSO)
Punti che contribuiscono alla RCS di un aereo e tecniche per
ridurre la RCS agendo sulla forma
CAP.3 – LUC.69/92
FONDAMENTI DI RIVELAZIONE RADAR
BERSAGLI FLUTTUANTI E MODELLI DI SWERLING (SINGOLO IMPULSO)
La tabella che segue, presa da Aviation-Week, 2001, mostra
valori tipici di RCS per veicoli e oggetti
CAP.3 – LUC.70/92
FONDAMENTI DI RIVELAZIONE RADAR
INTEGRAZIONE DEGLI IMPULSI
Processo di integrazione Coerente (cont.)
Si supponga di aver ricevuto N impulsi relativi ad un determinato
bersaglio supposto fermo e fisso (frequenza Doppler fD = 0). Inoltre si
ipotizzi che il disturbo sia il solo rumore termico. Il processo di somma
viene comunemente denominato "integrazione degli impulsi". Il tipo di
integrazione sopra descritto è di tipo coerente poiché tiene conto delle
fasi associate ai segnali relativi ai singoli echi ricevuti e fornisce un
guadagno di integrazione Gint.
Il rapporto SNR all'uscita dell'integratore è pari a
SNRout = Gint SNRin
in cui SNRin è il rapporto SNR che va inserito nella equazione del radar.
CAP.3 – LUC.71/92
FONDAMENTI DI RIVELAZIONE RADAR
INTEGRAZIONE DEGLI IMPULSI
Processo di integrazione Coerente (cont.)
Il guadagno Gint derivante dal processo di integrazione può essere
giustificato in base alle osservazioni riportate di seguito. Si
supponga il bersaglio fisso.
1
2
n1
s1
v1
n2
s2
nN
N
sN
vN
v2
Composizione vettoriale di segnale e rumore
CAP.3 – LUC.72/92
FONDAMENTI DI RIVELAZIONE RADAR
INTEGRAZIONE DEGLI IMPULSI
Processo di integrazione Coerente (cont.)
Ai vettori del segnale utile, vanno sommati i vettori ni
rappresentativi del processo di disturbo, le cui componenti sono
pari a
nIi(t) e nQi(t) i=1,..,N . L'orientamento e l'ampiezza dei
vettori di disturbo sono aleatori. I segnali ricevuti (somma di
segnale utile e rumore) sono rappresentati dai vettori v1, v2..., vN.
Quando si effettua integrazione i vettori dei segnali utili si sommano in
N
fase dando luogo ad un vettore il cui modulo sRis è pari a
∑s
i
i =1
e, nel
CAP.3 – LUC.73/92
FONDAMENTI DI RIVELAZIONE RADAR
INTEGRAZIONE DEGLI IMPULSI
caso di eguali ampiezze, a Ns1 (s1: tensione associata al segnale utile).
Invece i vettori associati ai segnali di rumore formano un poligonale
aleatoria come indicato in figura in cui nRis è la tensione associata al
vettore risultante.
sN
s2
s1
n2
n1
n Ris
nN
Somma delle componenti di segnale utile e di rumore
CAP.3 – LUC.74/92
FONDAMENTI DI RIVELAZIONE RADAR
INTEGRAZIONE DEGLI IMPULSI
Processo di integrazione Coerente (cont.)
Nelle ipotesi in cui siano note le varianze σ
2
i
i =1,..., N, delle variabili
di rumore e che queste ultime siano indipendenti e a valor medio nullo,
la varianza del rumore complessivo è pari a
2
σ TOT
=
N
∑
σ i2
i =1
2
2
σ
=
σ
∀i
i
Se
si ha
2
σ TOT
= Nσ 2
CAP.3 – LUC.75/92
FONDAMENTI DI RIVELAZIONE RADAR
INTEGRAZIONE DEGLI IMPULSI
Processo di integrazione Coerente (cont.)
Se si va a calcolare lo SNR associato al bersaglio fisso dopo il
processo di integrazione, dalle definizioni precedenti si ha
SNRout =
s
2
Ris
2
TOT
2σ
2
N s
s1
=
= N 2 = N ⋅ SNRin
2Nσ
2σ 1
2 2
1
2
1
Con l'ntegrazione coerente si è ottenuto un guadagno di
integrazione pari a N.
CAP.3 – LUC.76/92
FONDAMENTI DI RIVELAZIONE RADAR
INTEGRAZIONE DEGLI IMPULSI
Processo di integrazione Coerente
Se il bersaglio è mobile (ossia fD ≠ 0) occorre fare una
somma pesata dei vettori ricevuti in modo da "mettere in
fase" i vettori associati al segnale utile. Per eseguire una
simile operazione occorre conoscere, in linea di principio, la
frequenza Doppler associata al bersaglio. In seguito
verranno analizzati metodi di rivelazione ottima per tale
situazione; essi conducono a un “banco di filtri” nel dominio
della frequenza Doppler.
CAP.3 – LUC.77/92
FONDAMENTI DI RIVELAZIONE RADAR
INTEGRAZIONE DEGLI IMPULSI
Processo di Integrazione non coerente (cont.)
Si supponga che il bersaglio sia fisso.
Per ogni eco ricevuto si possono individuare due componenti di
segnale Ii(t) e Qi(t) i=1,..., N. Si supponga di estrarre i relativi
inviluppi vi (t ) =
( I (t )
1
2
+ Qi (t ) 2 ) e di sommarli. L'operazione di
decisione viene ora effettuata sulla variabile aleatoria somma degli
inviluppi associati ai singoli echi ricevuti.
CAP.3 – LUC.78/92
FONDAMENTI DI RIVELAZIONE RADAR
INTEGRAZIONE DEGLI IMPULSI
Processo di Integrazione non coerente (cont.)
Per il calcolo della probabilità di corretta rivelazione, PD, o della probabilità
di falso allarme, Pfa, in questo nuovo caso occorre calcolare la funzione di
densità della v.a. somma degli inviluppi. Per fare ciò si può supporre che le
v.a. di inviluppo siano statisticamente indipendenti. Di conseguenza la
funzione di densità della v.a. somma è pari alla convoluzione delle densità
di probabilità (non necessariamente uguali) delle singole v.a. Ovviamente
se le funzioni di densità delle singole v.a sono uguali, per determinare la
densità della variabile somma basta calcolare l'antitrasformata di Fourier
della n-esima potenza della funzione caratteristica della densità di
probabilità associata alla singola v.a.
CAP.3 – LUC.79/92
FONDAMENTI DI RIVELAZIONE RADAR
INTEGRAZIONE DEGLI IMPULSI
Processo di Integrazione non coerente (cont.)
Va osservato che non è possibile applicare il teorema del
limite centrale in quanto se N non è sufficientemente elevato,
esso non fornisce delle buone approssimazioni sulle code
della distribuzione della v.a. somma. Siccome ci si interessa
della
Pfa
e
quindi
dell'andamento
delle
code
della
distribuzione della v.a. somma, non è possibile approssimare
la densità della v.a. somma con la legge gaussiana.
CAP.3 – LUC.80/92
FONDAMENTI DI RIVELAZIONE RADAR
INTEGRAZIONE DEGLI IMPULSI
Processo di Integrazione non coerente
Nel caso di rivelazione non coerente, il guadagno di integrazione
è inferiore a N. Inoltre si dimostra che l'efficienza di integrazione
non coerente è funzione del numero di impulsi integrati e dipende
dai valori di PD e Pfa. Occorre infine precisare se l'operazione di
integrazione non coerente viene fatta considerando le grandezze
I (t ) + Q (t )
2
i
2
i
oppure considerando le grandezze
2
2
I i (t ) + Qi (t ) .
CAP.3 – LUC.81/92
FONDAMENTI DI RIVELAZIONE RADAR
INTEGRAZIONE DEGLI IMPULSI
Guadagno di integrazione in funzione del numero di impulsi
integrati non coerentemente (N)
1.000
12
PD =0.99
PD =0.90
G
100
=N
PD =0.50
PD =0.99
PD=0.90
nfa=10
4
ti
nt
eg
ra
t
or
PD =0.50
Pe
rfe
c
Guadagno di integrazione
nfa=10
G=
10
1
1
10
100
N
1.000
N
10.000
CAP.3 – LUC.82/92
FONDAMENTI DI RIVELAZIONE RADAR
INTEGRAZIONE DEGLI IMPULSI
Perdita di Integrazione Li (N) rispetto al caso di integrazione coerente
14
12
Perdita di integrazione Li(N), dB
nfa=10
nfa=10
12
4
10
PD=0.50
PD=0.90
8
PD=0.99
6
4
2
0
1
10
100
1.000
N
10.000
CAP.3 – LUC.83/92
FONDAMENTI DI RIVELAZIONE RADAR
INTEGRAZIONE DEGLI IMPULSI
Altri metodi di Integrazione Incoerente (cont.)
Un altro metodo di integrazione incoerente molto utilizzato è di tipo non lineare
e si basa sulla elaborazione del segnale ottenuto dal troncamento del segnale
ricevuto rispetto ad una soglia.
Si consideri un rivelatore (detector) che abbia la caratteristica in figura
Ao
1
T1
Ai
Caratteristica ingresso-uscita del rivelatore - quantizzatore
In generale si può assumere che tra l'ampiezza del segnale in ingresso al
detector Ai e quella in uscita Ao, ci sia una relazione del tipo Ao=g(Ai).
In uscita dal detector si possono avere i due casi Ao= 0 oppure Ao= 1.
Si tratta quindi di un quantizzatore ad 1 bit.
CAP.3 – LUC.84/92
FONDAMENTI DI RIVELAZIONE RADAR
INTEGRAZIONE DEGLI IMPULSI
Altri metodi di Integrazione Incoerente (cont.)
Ricevitore
Radar
Rivelatore
Soglia T1
(prima soglia)
Quantizzatore
Contatore
Campionatore
Bersaglio
SI/NO
Soglia T2
(seconda soglia)
Schema a blocchi di un rivelatore a “doppia soglia” oppure a
“finestra mobile binaria”
T1 è il valore di prima soglia. All'uscita del rivelatore (quantizzatore) si
ottiene una stringa di bit.
CAP.3 – LUC.85/92
FONDAMENTI DI RIVELAZIONE RADAR
INTEGRAZIONE DEGLI IMPULSI
Altri metodi di Integrazione Incoerente (cont.)
{0,1}
z -1
z -1
z -1
+
SI
>T2
NO
1
0
Registro a scorrimento
Il segnale in uscita da tale registro viene calcolato in questo modo. Se il
numero di 1 (cioè di detezioni) presenti nel registro ad un certo istante
supera un valore prefissato T2 (detto valore di seconda soglia), in uscita
dal registro a scorrimento viene emesso un valore 1, altrimenti si ha 0
(cioè si considera il bersaglio presente oppure no).
CAP.3 – LUC.86/92
FONDAMENTI DI RIVELAZIONE RADAR
INTEGRAZIONE DEGLI IMPULSI
Altri metodi di Integrazione Incoerente (cont.)
Finestra mobile di lunghezza N in grado di traslare sul segnale in uscita dal detector
muovendosi di un bit alla volta. Se il numero di 1 contenuti nella finestra ad un certo
istante supera il valore di seconda soglia viene emesso un valore 1 altrimenti 0. Di
solito si parla di logiche del tipo 3 su 5, 8 su 10 e 4 su 7. Ciò significa che viene emesso
un valore uno se il numero di 1 presenti nella finestra supera ad es. il valore di 4 quando
la finestra è lunga 7.
Logica 4 su 7
0 0 1 0 0 1 1 1 0 1 0 0
SIN
0 1 1 1 1 1
S OUT
Esempio di sequenze binarie nel rivelatore a “doppia soglia”
CAP.3 – LUC.87/92
FONDAMENTI DI RIVELAZIONE RADAR
INTEGRAZIONE DEGLI IMPULSI
Altri metodi di Integrazione Incoerente (cont.)
La lunghezza N del registro a scorrimento deve essere scelta in
relazione al tempo di insistenza (td ) che dipende a sua volta dalla
PRF. In generale la lunghezza della finestra può essere assunta pari
a PRF • td. La soglia T1 ,e il valore della seconda soglia T2, devono
essere scelti in modo da ottenere la Pfa desiderata e massimizzare la
PD.
CAP.3 – LUC.88/92
FONDAMENTI DI RIVELAZIONE RADAR
INTEGRAZIONE DEGLI IMPULSI
Tende a 0.2035
10.000
Numero di impulsi integrati N
1.000
Numero di impulsi
N in funzione
di nopt/N
100
10
1
0
0.2
0.4
0.6
0.8
Valore ottimo di T2 /N
1.0
CAP.3 – LUC.89/92
FONDAMENTI DI RIVELAZIONE RADAR
INTEGRAZIONE DEGLI IMPULSI
Altri metodi di Integrazione Incoerente
L'uso della finestra mobile comporta una perdita (dovuta alla
quantizzazione
integrazione
a
1
esaminati
bit)
rispetto
ai
procedimenti
precedentemente.
In
pratica
di
il
guadagno di integrazione Gint può essere determinato
sottraendo 1÷1.5 dB dal valore del guadagno di integrazione
non coerente.
CAP.3 – LUC.90/92
FONDAMENTI DI RIVELAZIONE RADAR
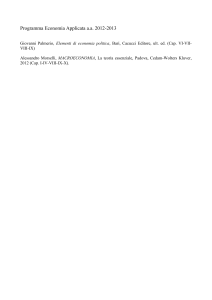
INTEGRAZIONE DEGLI IMPULSI
Per un bersaglio non fluttuante le curve di Blake riportano l'andamento del SNR in
funzione del numero di impulsi di integrazione per un fissato valore della probabilità di
corretta rivelazione al variare della pfa.
15
13.2
Pfa=10 -12
10
10 -10
10 -8
SNR, dB
5
10 -6
10 -4
0
-5
- 10
- 15
1
10
100
1.000
10.000
Numero di impulsi, N
SNR in funzione del numero di impulsi di integrazione per un fissato valore della probabilità di corretta
rivelazione (PD= 0.90), per bersaglio fisso e 5 valori di Pfa (da: Blake)
CAP.3 – LUC.91/92
FONDAMENTI DI RIVELAZIONE RADAR
INTEGRAZIONE DEGLI IMPULSI
dB
20
17.7
PD = 0.80
6
-6
Pn = 10 (n = 0.69 x 10 )
FEHLNER'S DATA, BASED ON MARCUM &
SWERLING, COSTANT n
1 Steady target, video integration
2 Fast fluctuation, video integration (Swerling case 2)
3 Slow fluctuation, video integration (Swerling case 1)
4 Steady target, coherent integration
5 Slow fluctuation, coherent integration
15
12.5
1
10
2
3
5
5
0
4
Fluctuation loss
= 5.2 dB
1 2
-5
- 10
- 15
1
2
3
5
10
100
1.000
10.000
N
SNR (dB) su singolo impulso richiesto per avere PD = 0.8, Pfa = 10 in
funzione del numero di impulsi integrati N (Barton)
-6
CAP.3 – LUC.92/92