RISONANZA MAGNETICA
CAMPO DI APPLICAZIONE
Si tratta di una tecnica diagnostica ormai molto diffusa. Offre prestazioni in un certo
senso complementari rispetto alle tecniche diagnostiche radiologiche che fanno uso di
radiazioni ionizzanti (TAC e raggi X).
Il contrasto delle immagini fornite dalla TAC e dai raggi X è basato sulla presenza di
materiali a numero atomico medio/alto e pertanto sono bene evidenziate strutture
ossee, calcificazioni e volumetrie di parti molli in cui siano stati iniettati mezzi di
contrasto (MDC).
Al contrario la formazione dell’immagine nella MR è basata sul segnale proveniente
dai quei protoni che sono il nucleo degli atomi di idrogeno della molecola di acqua ed
il contrasto dell’immagine è determinato dall’ambiente fisico-bio-chimico in cui dette
molecole sono immerse. Pertanto l’informazione proviene dall’idrogeno, che è
l’elemento avente il minor numero atomico. In pratica questa modalità diagnostica è
in grado di visualizzare con buona risoluzione spaziale i vari tessuti dell’organismo,
potendone differenziare compartimenti aventi minime diversità di struttura e/o
composizione. Le normali tecniche radiologiche non raggiungono il potere
discriminante tra le varie tipologie di tessuti che invece la MR offre. Ad esempio,
nell’imaging cerebrale la distinzione tra materia grigia, materia bianca e liquido
cefalorachidiano è netta, in quanto si riesce spesso a far sì che questi tipi di tessuto
occupino fino a quasi il 50% del range dinamico dell’immagine. In confronto nella
TAC, con la scala di Hounsfield, gli stessi tessuti coprono solo qualche unità %
dell’intero range dinamico dell’immagine. Inoltre va fatto osservare che la MR non
utilizza radiazioni ionizzanti e, pertanto, permette la ripetizione di esami a tempi
ravvicinati senza l’insorgenza di problematiche di natura radioprotezionistica per il
paziente.
Allo stato attuale delle conoscenze non vi sono motivi per ritenere dannoso un esame
di MR, eccetto negli ovvi casi in cui il campo magnetico interagisca con impianti
metallici presenti nel corpo del paziente (come pacemaker o clip vascolari) o con
schegge metalliche di origine traumatica o altro. Solo in alcuni casi particolari, come
nel caso di pazienti in gravidanza, va osservato il principio di giustificazione: la
metodica deve essere ritenuta potenzialmente dannosa ed applicata solo dopo attenta
valutazione del rapporto rischio/beneficio.
In generale gli svantaggi nell’utilizzo della MR sono principalmente rappresentati dal
costo e dal tempo necessario all’acquisizione delle immagini.
CAUTELE
Il paziente non deve assolutamente indossare oggetti di materiale metallico potenzialmente ferromagnetico, quali orologi, bracciali, catenine. Particolare attenzione
deve essere posta nell’accertamento che il paziente non abbia subito in passato
1
incidenti in seguito ai quali schegge metalliche possano essere rimaste nei tessuti. In
base all’anamnesi si deve verificare che il paziente non abbia subito operazioni
chirurgiche che abbiano comportato l'impianto di oggetti metallici. Tutti gli oggetti di
materiale ferromagnetico immersi in un campo magnetico intenso subiscono forze
rilevanti che possono provocarne lo spostamento con conseguente danno ai tessuti, ad
esempio nel caso delle schegge che possano trovarsi vicino a vasi sanguigni. Anche
in assenza di tali rischi, la semplice presenza di materiale ferromagnetico può alterare
il campo di radiofrequenza cui sono sottoposti i tessuti e causare un anomalo
riscaldamento dei tessuti circostanti, con conseguente possibile danno. Il pigmento di
determinati tatuaggi può provocare simili problemi.
La presenza di protesi, clip vascolari, stent, stimolatori cardiaci o altri apparati
medico-chirurgici impedisce l'esecuzione o la corretta lettura dell'esame. Dagli anni
1990 vengono utilizzati sempre più spesso materiali MR-compatibili, ma con
l'aumentare della potenza degli scanner tale problema si ripresenta continuamente:
occorre per tal motivo conoscere, per ogni materiale utilizzato, fino a che intensità del
campo magnetico esso è da considerarsi MR-free.
TIPOLOGIE DIAGNOSTICHE
Oltre alla diagnostica MR standard, di natura essenzialmente strutturale, esiste la
risonanza magnetica di diffusione (DTI = Diffusion Tensor Imaging), utilizzata
principalmente nell’imaging cerebrale per lo studio delle connessioni tra le varie
porzioni dell’encefalo (con la trattografia si possono mappare i percorsi degli assoni
nella materia bianca del tessuto cerebrale). Inoltre esiste la risonanza magnetica
funzionale (fMRI = functional Magnetic Resonance Imaging) utilizzata per lo studio
dell’attività cerebrale. La fMRI risulta di fondamentale importanza nelle
neuroscienze. Nell’attività clinica il suo utilizzo principale consiste come ausilio nella
pianificazione di operazioni neurochirurgiche che prevedano l’asportazione di
porzioni critiche di tessuto cerebrale.
ECCITAZIONE TRASVERSALE PER RISONANZA
Se esposto ad un campo statico Bo abbastanza intenso, un corpo contenente un’alta
percentuale di acqua si polarizza magneticamente, grazie al contributo dei momenti
magnetici mp dei protoni, sviluppando un momento magnetico macroscopico m
orientato parallelamente al campo magnetico Bo (che viene detto campo
polarizzatore). Nessun segnale utile può essere ottenuto da questo momento
magnetico m statico, sebbene esso risulti la somma vettoriale di tanti contributi dei
vettori microscopici mp, che precedono alla frequenza di Larmor nL attorno alla
direzione di Bo. I singoli moti di precessione sono incoerenti (caotici) e danno una
risultante trasversale identicamente nulla.
Per ottenere un segnale ricevibile da un’antenna e che sia utile, risulta necessario
applicare al corpo un campo magnetico B1(t), detto campo eccitatore, variabile con il
tempo ed avente direzione perpendicolare (trasversa ® xy) rispetto al campo
2
principale Bo (longitudinale ® z). Se la dipendenza temporale di una componente
trasversa di B1(t) è data dall’andamento armonico
B1(t) = B1 cos(2 p nL t),
con ampiezza B1 e frequenza eguale alla frequenza di Larmor, si realizzerà la
condizione di risonanza, adatta a trasferire efficacemente energia agli spin dei protoni
del corpo. Una spiegazione accurata della forma del campo eccitatore (o drive) e
della sua azione sui momenti magnetici dei protoni sarebbe molto elaborata, ma per
semplicità ci si può limitare a dire che il sistema di dipoli esce dalla condizione di
equilibrio termodinamico regolato dalla distribuzione di Boltzmann e che, a seguito
dell’apporto energetico, il valore di Ndown cresce a spese di Nup. Si può arrivare ad
avere un’inversione della popolazione, con Ndown > Nup. Questo fatto comporta una
progressiva riduzione della componente z del momento magnetico macroscopico m
fino al suo azzeramento e successivo raggiungimento di valori negativi (orientamento
antiparallelo). A questo fatto si deve aggiungere la nascita di una componente di m
trasversa (giacente cioè nel piano xy) e ruotante con la velocità angolare di Larmor
wL = 2 p nL . Questo succede poiché adesso è il campo eccitatore B1(t) a “guidare la
danza” e a costringere i momenti microscopici mp a ruotare coerentemente (in fase).
Il risultato finale dell’applicazione del campo eccitatore B1(t) è che la
magnetizzazione macroscopica m inizia a scostarsi dall’asse z, formando con detto
asse l’angolo q, (angolo di flip) che continua crescere finché dura l’applicazione di
B1(t). Questo scostamento dall’asse z è accompagnato dal moto di precessione che m
compie alla velocità angolare di Larmor. Come indicato nella figura seguente, la
precessione è descritta dall’angolo f che varia nel tempo con la legge f = wL t.
Nella figura di sinistra il campo eccitatore B1(t) è stato applicato fino a portare la
magnetizzazione m nel piano xy (angolo di flip q = p/2). In questa situazione si avrà
Nup = Ndown poiché la componente z di m è nulla. Nella figura di destra viene mostrata
la precessione della magnetizzazione m attorno all’asse z con velocità angolare wL. In
questo caso l’angolo di flip q è minore di p/2. In assenza di interazione con
3
l’ambiente e di fenomeni dissipativi il moto di precessione perdura mentre q resta
costante poiché l’energia del sistema non varia. La frequenza di questo moto è
e vale nL = 63.86 MHz per Bo = 1.5 T. Si è nel campo delle radio-frequenze (RF). Il
moto di precessione di m dà origine ad un campo magnetico rotante, il quale, per la
legge dell’induzione elettromagnetica (Faraday-Neumann-Lenz), genera un segnale
RF di frequenza nL, segnale che un’antenna può ricevere e passare agli appositi
dispositivi di immagazzinamento ed elaborazione dati. La potenza del segnale RF è
proporzionale a sin2(q), massima quindi per q = p/2 e nulla per q = 0 e q = p.
IMPULSI p/2 E p
L’applicazione del campo eccitatore (drive) B1(t) ad un momento magnetico m
inizialmente orientato lungo l’asse z produce crescita dell’angolo di flip q dal valore
inizialmente nullo fino ad un valore che dipende dalla durata dell’applicazione. Si
può dimostrare che se il drive viene applicato per una durata tpulse (per poi essere
spento), l’angolo di flip è dato dalla relazione q = g B1 tpulse. Sono frequentemente
utilizzate le applicazioni tali da portare m nel piano xy (impulso p/2) oppure
addirittura in direzione antiparallela rispetto all’asse z (impulso p). Nel primo caso la
durata tpulse dell’impulso deve obbedire alla relazione B1 tpulse = p/(2 g) e la potenza
del segnale RF emesso dai dipoli è massima. Invece, nel secondo caso la durata tpulse
dell’impulso deve obbedire alla relazione B1 tpulse = p/g e la potenza del segnale RF
emesso è nulla. Come esempio, si ha q = p/2 con B1 = 5.87 mT e tpulse = 1 ms.
TEMPI DI RILASSAMENTO LONGITUDINALE E TRASVERSALE
Il sistema di dipoli, dopo l’applicazione di un drive B1(t), ritorna più o meno
rapidamente allo stato iniziale di equilibrio termodinamico iniziale caratterizzato da
un momento magnetico m statico ed orientato lungo l’asse z. I meccanismi principali
che promuovono questo ritorno sono due, l’interazione spin-reticolo, caratterizzata
dal tempo T1 e l’interazione spin-spin, caratterizzata dal tempo T2.
L’interazione spin-reticolo (o nucleare; viene anche detta interazione spin-lattice
dall’inglese spin-lattice relaxation) è dovuta al fatto che durante la precessione di
Larmor gli spin elementari interagiscono con le molecole dei tessuti. Dette interazioni
sono dissipative, sottraggono energia al sistema riconducendolo verso la condizione
di equilibrio termodinamico iniziale. L’effetto visibile sul momento magnetico
macroscopico m è la progressiva riduzione dell’angolo di flip q verso lo zero poiché
la componente z di m tende a ritornare al valore che aveva prima dell’applicazione del
drive. Il corrispondente tempo caratteristico è T1 e viene detto tempo di rilassamento
longitudinale poiché definisce la scala di tempo con la quale il momento
macroscopico m tende a riallinearsi con il campo polarizzatore Bo (asse z).
4
L’interazione spin-spin è dovuta al fatto ogni momento magnetico microscopico mp
produce un piccolo campo magnetico e, quindi, ogni spin durante il moto di
precessione subisce gli effetti delle piccole alterazioni (casuali) del campo magnetico
polarizzatore prodotte dai momenti magnetici degli altri protoni vicini. Pertanto ogni
spin si trova a precedere in un campo magnetico leggermente diverso da quello
sentito dagli altri e finisce per precedere con una frequenza di Larmor leggermente
diversa da quelle degli altri. Questo effetto non è dissipativo, tende a conservare la
componente z dei momenti magnetici, ma produce una progressiva perdita di
coerenza tra i moti di precessione microscopici (l’azione del drive è cessata in quanto
impulsiva !) e finisce per distruggere la componente rotante trasversa del momento
magnetico macroscopico m. Conseguentemente il segnale RF si attenua fino a sparire.
La sequenza di eccitazione/rilassamento in cui si utilizza questo effetto si chiama FID
(da Free Induction Decay). Il tempo caratteristico dei fenomeni collegati
all’interazione spin-spin è T2, che viene detto tempo di rilassamente trasversale.
Vale sempre la relazione T1 > T2. Purtroppo i due fenomeni di rilassamento
precedentemente illustrati agiscono contemporaneamente e questo complica le
determinazioni dei due tempi caratteristici. Soprattutto la determinazione di T1 è resa
problematica dal concorrente effetto dell’interazione spin-spin con tempo T2 < T1 e
per separare gli effetti sono richieste complesse sequenze di eccitazione-rilassamento.
Nella figura successiva le frecce indicano in maniera qualitativa e schematica come
i singoli momenti magnetici microscopici mp si sommano per comporre il momento
magnetico macroscopico m prima, subito dopo ed un po’ dopo l’applicazione di un
drive.
a) Situazione iniziale
Prima dell’applicazione del drive di eccitazione B1(t) ad un tessuto, in presenza del
campo magnetico di polarizzazione Bo, i momenti magnetici mp sono orientati
parallelamente a Bo.
Il sistema è nello stato di equilibrio termodinamico, l’energia è minima ed il sistema
non irradia segnale RF.
b) Applicazione dell’impulso di eccitazione
Subito dopo la fine dell’applicazione di un drive B1(t) per un tempo t = tpulse
5
tutti i momenti magnetici microscopici effettuano un moto di precessione coerente
(tutti i momenti ruotano con lo stesso angolo f) attorno a Bo formando uno stesso
angolo di flip θ (θ = g B1 tpulse) con l’asse z;
- il sistema ha acquistato una certa energia dipendente da θ;
- può inoltre essere rivelato un segnale RF con frequenza nL, risultante dalla sovrapposizione coerente dei segnali emessi dai singoli dipoli magnetici microscopici mp.
c)- d) Interazione spin-spin
Ogni momento magnetico (spin) produce nelle proprie vicinanze un debole campo
magnetico che influenza i momenti magnetici (spin) vicini. Il campo magnetico Bo
presente nella posizione di ognuno dei momenti risulta pertanto perturbato dal campo
magnetico dovuto agli spin vicini, per cui
- le velocità di precessione di Larmor wL dei vari dipoli magnetici mp differiranno,
anche se di poco;
- le fasi f delle precessioni relative cominceranno a differire, prima di poco, con un
allargamento Df ® figura c), poi sino alla totale perdita di coerenza ® figura d);
- il tempo caratteristico di questo processo di progressiva perdita di coerenza, dovuta
all’interazione spin-spin, è denominato tempo T2 (tempo di rilassamento trasversale);
- il segnale emesso dal sistema di spin decade a zero con la stessa costante tempo T2;
- l’energia del sistema resterebbe invariata, se non fosse per la contemporanea azione
del meccanismo di cui al punto successivo e), meccanismo che dissipa energia in
misura usualmente moderata sulla scala di tempo di T2.
e) Interazione spin-lattice
Durante la precessione di Larmor i singoli dipoli magnetici interagiscono con le
molecole dell’organo cui appartengono. Tali interazioni sono dissipative e quindi
sottraggono gradualmente energia ai dipoli. Conseguentemente l’angolo di flip θ si
riduce a zero attraverso il graduale ritorno della componente z di m al valore previsto
dall’equilibrio termodinamico. Il sistema ritorna alla condizione di minima energia.
Questo processo di riallineamento di m con la direzione del campo polarizzatore Bo e
conseguente ritorno all’energia minima viene denominato rilassamento per interazione spin-lattice. Tale rilassamento (rilassamento longitudinale) avviene con la
costante tempo caratteristica T1, più lunga di T2.
-
TIPO DI INDAGINI MR
Le principale proprietà dei tessuti indagabili con la tecnica MR sono: il contenuto
percentuale in acqua ed i tempi T1 e T2.
La determinazione di tali proprietà può essere effettuata osservando il segnale emesso
dai tessuti (eco – in inglese echo) in risposta a particolari impulsi di drive della
risonanza (sequenze drive-echo).
Determinazione del contenuto in H2O e di T2
Il contenuto percentuale di acqua e il tempo T2 possono essere determinati con una
singola sequenza del tipo di quella descritta nella figura precedente, in cui l’impulso
di drive è un impulso p/2 (si pensi ad una versione di quella figura con θ = p/2).
6
Tale sequenza va sotto il nome di FID (Free Induction Decay). Il tempo di
decadimento dell’eco fornisce direttamente la misura di T2. L’ampiezza iniziale dell’eco stesso, essendo proporzionale all’intensità del momento magnetico macroscopico m e quindi in definitiva alla concentrazione tissutale di H (della molecola H2O),
fornisce l’indicazione del contenuto percentuale di acqua. I protoni di H di altre
molecole non danno segnale poiché risuonano a frequenze diverse (chemical shift).
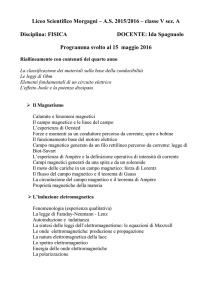
Le immagini MR basate sui valori di T2 sono dette immagini T2 (T2-weighted
images) mentre le immagini basate sul contenuto percentuale di acqua sono
denominate immagini MR in modalità PD (PD-weighted images dove PD sta per
Proton Density).
Determinazione di T1
La determinazione di T1 richiede la ripetizione di diverse sequenze IR (inversion
recovery). In generale, nel caso di ripetizioni della stessa sequenza, il tempo che
trascorre tra l’inizio di una sequenza e l’inizio della successiva è chiamato tempo di
ripetizione (TR). In questo caso specifico il TR è parecchio superiore a T1 per
permettere al sistema di ritornare ogni volta allo stato iniziale di equilibrio
termodinamico. Le varie sequenze consistono nell’applicazione di un impulso p e,
dopo un tempo TE che cambia di volta in volta, di un impulso p/2. L’effetto
dell’impulso p/2 è quello di eliminare (o almeno ridurre drasticamente) l’effetto
dell’interazione spin-spin (tempo T2) e quindi di mettere in evidenza l’effetto
dell’interazione spin-reticolo caratterizzata dal tempo di rilassamento longitudinale
T1. Si può dimostrare che dopo l’applicazione di un impulso p la componente
longitudinale (asse z) del momento macroscopico m varia secondo la legge
mz(t) = mzo [1 – 2 exp(-t / T1)]
dove t rappresenta il tempo durante il quale l’interazione spin-reticolo è lasciata
lavorare. La componente mz(t) vale -mzo al tempo t = 0, passa per lo zero al tempo t =
T1 ln(2) e vale praticamente +mzo a partire da t » 5 T1. I valori di TE permettono di
esplorare questo andamento per alcuni tempi t e di ricavare una stima per T1. Nelle
figure seguenti si descrive il comportamento del sistema per alcuni valori di TE.
B
Sequenza IR
TE = 0 sec
B
B
p
a)
b)
B
B
c)
d)
Sequenza IR
TE < T1 ln(2)
B
B
θ
p
wL
wL
a)
b)
c)
d)
7
Sequenza IR
TE > T1 ln(2)
a) Situazione iniziale
Prima dell’applicazione del drive B1 ad un tessuto, in presenza di un campo
magnetico di polarizzazione Bo :
- i momenti magnetici sono orientati parallelamente al campo di polarizzazione Bo ;
- l’energia è minima e nessun segnale RF viene irradiato dal sistema.
b) Applicazione dell’impulso p
Immediatamente dopo la fine dell’applicazione dell’impulso p :
- tutti i momenti magnetici sono stati ruotati di 180° (flip θ = 180°);
- tutti i dipoli magnetici hanno acquisito una energia eguale a Umax ;
- nessun segnale viene emesso essendo l’angolo di flip θ = 180°.
c) interazione con il tessuto (spin-reticolo o spin-lattice)
Il sistema di spin viene lasciato interagire con il tessuto per un certo tempo (TE). Per
effetto dell’interazione spin-lattice (costante tempo di rilassamento longitudinale T1):
- l’energia del sistema di dipoli diminuisce;
- la componente mz aumenta (manifesta la tendenza a passare da -mzo a +mzo confrontare le 3 figure);
- i dipoli non irradiano poiché i relativi moti di precessione diventano incoerenti per
l’effetto spin-spin con tempo caratteristico T2 (più breve !).
d) Applicazione dell’impulso p/2
Viene applicato un impulso p/2. Alla fine dell’impulso p/2 :
- i momenti magnetici subiscono un nuovo flip di 90 °;
- la componente z della loro risultante precede attorno a B0 poiché, a seguito della
rotazione di p/2, essa è diventata la componente trasversa (vedi figura);
- viene emesso un segnale RF la cui ampiezza dipende dal valore di mz divenuta
adesso la componente trasversa. Il suo valore, e quindi l’ampiezza del segnale RF
emesso, dipendono dal tempo TE di interazione spin – tessuto lasciato intercorrere tra
le fasi b) e c). Nella prima figura TE = 0, nella seconda TE < T1 ln(2) mentre nella
terza figura TE > T1 ln(2) [ad esempio TE = 2 T1].
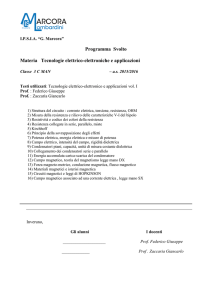
L’esecuzione della misura di T1 richiede la ripetizione dell’intera sequenza abcde
appena descritta (a intervalli TR e con diversi valori di TE crescenti ed
opportunamente dislocati).
Ad ogni ripetizione, al crescere di TE il segnale di eco emesso varierà seguendo
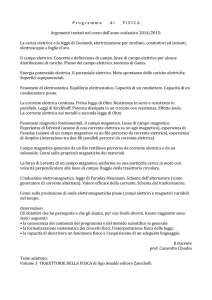
l’andamento temporale generato da mz(t) = mzo [1 – 2 exp(-t/T1)]. Il grafico che
segue riporta l’andamento del segnale misurato eseguendo una serie di 7 misure con
8
tempi di attesa eco TE via via crescenti da 0 sec a 10 sec. Il tempo T1 dedotto dalla
figura risulta 1.5 sec. Dalla figura risulta che la componente z del momento
.
.
magnetico cambia segno al tempo t = T1 ln(2) = 1.5 0.6931 s » 1.04 s.
M(z) after inversion, T 1= 1.5s
1
0.8
0.6
M(t) normalized
0.4
0.2
0
-0.2
-0.4
-0.6
-0.8
-1
0
1
2
3
4
5
6
7
8
9
10
t (s)
Per evidenziare la potenzialità dei vari parametri misurati con la MR per quel che
concerne la capacità di distinguere tessuti di tipo diverso (contrasto) vengono riportati
in tabella i valori di T1, T2 e %H2O misurati su campioni di tessuto di topo di 25
giorni di età.
Cervello
Fegato
Milza
Rene
Muscolo
T1 (ms)
337
154
295
292
256
T2 (ms)
89
43
74
71
56
%H2O
79
71
78
79
78
IMAGING MR (MRI)
Nella pratica clinica dalla MR si ricavano delle immagini, da cui il termine Magnetic
Resonance Imaging (MRI), immagini che vengono o stampate come lastre e
consultate come lastre (vecchia maniera) oppure vengono registrare in formato
digitale su altri supporti più moderni e visualizzate sullo schermo di un computer
(nuova maniera). Nel primo caso è sufficiente l’acquisizione di scansioni planari (2D)
di sezioni significative dell’organo da studiare mentre nel secondo caso risulta
fruibile una scansione volumetrica (3D) dell’organo, ottenuta impilando scansioni
planari contigue ravvicinate (distanza relativa dell’ordine del mm). In entrambi i casi
la MR produce delle immagini, con pixel (voxel nel caso 3D) di lato di circa 1 mm.
Nel gergo dell’imaging dicesi slice (termine inglese per l’italiano sezione o fetta)
l’immagine 2D che è risultato di una scansione planare. Talvolta con il termine slice
s’intende anche la sezione del corpo da cui quell’immagine ha avuto origine.
9
Per poter costruire le immagini occorre distinguere, con risoluzione spaziale del mm,
i segnali sulla base della zona di provenienza. La localizzazione spaziale del segnale
è ottenuta creando dei gradienti di campo magnetico orientati lungo gli assi x, y e z.
Un gradiente di campo magnetico è una variazione del campo magnetico rispetto ad
una variazione di posizione. Un gradiente mono-direzionale (asse x) è una variazione
di campo magnetico rispetto a variazioni di posizione lungo un asse (asse x).
L’impiego di gradienti, opportunamente temporizzati, orientati nelle tre direzioni x, y
e z permette di distinguere (separare) i segnali provenienti da regioni diverse con la
risoluzione spaziale richiesta. In questo modo ogni elemento (®voxel dell’immagine)
del corpo in esame è sottoposto ad un campo diverso e risuona ad una frequenza
leggermente diversa dagli altri.
Pertanto, mediante l’analisi delle componenti in frequenza (componenti spettrali) del
segnale acquisito in presenza di gradienti di campo è possibile ottenere
l’informazione spaziale necessaria a ricostruire le immagini MR.
SEQUENZA DI CONTROLLO DEI GRADIENTI DI CAMPO
Selezione della slice
La selezione della slice avviene applicando durante
l’eccitazione un gradiente di campo perpendicolare
allo strato che si desidera analizzare. Se ad esempio lo
strato da analizzare è verticale (piano xy di figura),
durante l’impulso di drive (frequenza di drive = ndrive)
si applicherà un gradiente lungo la direzione orizzontale
(asse z di figura). Pertanto i voxel di ogni slice verticale
si troveranno in un campo statico B diverso.
Poiché vale wL = g B verranno eccitati solo i dipoli
appartenenti allo strato z = z* in cui il campo B obbedisce
alla relazione B = wdrive / g . Terminato il drive tutti e soli i
voxel dello strato z = z* emetteranno un segnale con la
stessa frequenza ndrive.
Codifica di fase
Subito dopo la fine del drive viene applicato impulsivamente
un gradiente di B in una direzione perpendicolare al
gradiente di selezione slice (es.: parallelo asse y).
I dipoli appartenenti a differenti strisce della slice
aventi y diverso precederanno, durante l’impulso, con
una frequenza leggermente diversa: alcuni
anticiperanno e altri ritarderanno. Alla fine dell’impulso, con lo spegnimento del gradiente lungo y,
riacquisteranno la comune frequenza iniziale di precessione, ma avranno una fase diversa (fase codificata).
In pratica la realizzazione di questo tipo di codifica
richiede la ripetizione di questa procedura più volte.
10
Codifica di frequenza
Dopo lo spegnimento del gradiente y viene acceso un
gradiente x nella direzione perpendicolare alle precedenti e comunque parallelo alla slice (asse x).
I segnali provenienti da dipoli aventi x diversi sono
distinguibili avendo diversa frequenza.
I dipoli aventi lo stesso valore di x sentiranno lo
stesso campo e quindi precederanno con la stessa
frequenza, ma i relativi segnali saranno distinguibili
in quanto, avendo diverso y, hanno una fase diversa
a seguito della precedente codifica di fase.
Spettro emesso
Il segnale proveniente dalla slice eccitata sarà costituito dalla sovrapposizione di
segnali emessi dai singoli voxel, ciascuno dei quali avrà una propria ampiezza, fase e
frequenza (per effetto delle codifiche precedentemente illustrate). Tale segnale sarà
quindi costituito da uno spettro di frequenze, dal quale può essere direttamente
ricavata la Trasformata di Fourier (FT) dell’immagine. Appositi algoritmi matematici
(FFT inversa) realizzano l’inversione della FT in modo rapidissimo e danno le
immagini spaziali. Queste, per ogni slice, sono le mappe delle distribuzioni spaziali
delle grandezza fisiche misurate: PD, T1 e T2. Con una scansione che preveda
l’acquisizione di molte fette opportunamente posizionate lungo l’asse z si ottiene
l’immagine 3D, il cui potenziale informativo risulta superiore a quello delle tradizionali lastre purché si abbiano a disposizione opportuni mezzi informatici di
visualizzazione.
ELEMENTI COSTITUENTI UNO SCANNER MR
Uno scanner MR commerciale è formato da elementi che creano campi magnetici
statici oppure variabili nel tempo e nello spazio, coordinati da una complessa
elettronica di controllo, che è assistita da un calcolatore. Tali elementi sono:
-il magnete principale, la cui funzione è creare un campo magnetico statico e
omogeneo di elevata intensità per permettere la polarizzazione dei nuclei;
-le bobine a radiofrequenza, che generano il campo magnetico rotante alla frequenza
di Larmor e ricevono i segnali RF emessi dai dipoli;
-le bobine di gradiente, che generano campi magnetici che variano linearmente nello
spazio, indispensabili alla generazione di immagini;
-varie bobine ausiliarie, che servono per compensare per eventuali disomogeneità o
per modificare in altro modo le geometrie dei campi principali.
MAGNETE PRINCIPALE
Il magnete principale è il componente più grande e costoso dello scanner. Tutto il
resto dello scanner può essere considerato ausiliario ad esso. La sua funzione è quella
11
di creare un campo magnetico costante nello spazio e nel tempo. La specifica più
importante di un magnete per l'imaging a risonanza magnetica è l'intensità Bo del
campo prodotto. Campi magnetici di maggiore intensità aumentano il rapporto
segnale rumore (SNR) dell'immagine, permettendo risoluzioni più alte o scansioni
più rapide. Tuttavia, intensità più alte richiedono magneti più costosi e con costi di
manutenzione più elevati, oltre ad avere bisogno di misure di sicurezza più rigorose.
Attualmente campi magnetici a 1.5 T sono considerati un buon compromesso tra
costo e prestazioni per l'uso clinico generale. Sta comunque iniziando l'introduzione
di campi magnetici a 3 T soprattutto per applicazioni di fMRI o per l'imaging
cardiaco.
Un parametro altrettanto importante per valutare la qualità di un magnete è
l’omogeneità del campo Bo: le fluttuazioni nell'intensità del campo all'interno della
regione utile all’imaging (FoV = Field of View) dovrebbero essere inferiori allo
0,001%.
Tre tipologie di magnete sono usate:
Magnete permanente. Magneti convenzionali fatti di materiali ferromagnetici (ad
esempio acciaio) possono essere usati per ottenere il campo principale. Magneti di
questo tipo sono estremamente ingombranti (con un peso che può superare le 100
tonnellate), ma una volta installati hanno bassi costi di manutenzione. I magneti
permanenti possono raggiungere solo intensità di campo limitate (normalmente
inferiori a 0.4 T) ed hanno stabilità nel tempo ed omogeneità non eccellenti. Pongono
inoltre problemi di sicurezza, in quanto il campo magnetico non può essere mai
disattivato.
Elettromagnete resistivo. Si tratta di un solenoide di cavo di rame. I vantaggi di
questo tipo di magnete sono il basso costo, ma l'intensità di campo è limitata e la
stabilità scarsa. L'elettromagnete richiede un’elevata corrente elettrica per mantenere
attivo il campo, il che lo rende costoso da utilizzare. Questa soluzione risulta ormai
obsoleta.
Elettromagnete a superconduttore. Quando una lega di niobio-titanio è raffreddata
con elio liquido alla temperatura assoluta di 4 K, essa diventa superconduttiva, cioè
riduce la propria resistività a zero. Costruendo un elettromagnete con cavo
superconduttore, è possibile ottenere intensità di campo molto alte con ottime
caratteristiche di stabilità. La costruzione di un tale magnete è estremamente costosa.
Inoltre anche l'elio per il raffreddamento è costoso e molto difficile da maneggiare.
Tuttavia, nonostante il costo, magneti a superconduttore raffreddati ad elio sono i più
comunemente usati negli scanner moderni. Nonostante l'isolamento termico, il calore
presente nell'ambiente attorno allo scanner causa una lenta ebollizione ed
evaporazione dell'elio liquido. Di conseguenza è necessario rabboccare regolarmente
l'elio. Per questo motivo, un criostato può essere usato per ricondensare l'elio che
evapora.
I magneti principali sono disponibili in diverse forme. I magneti permanenti sono più
frequentemente fatti a forma di ferro di cavallo, mentre quelli a superconduttore sono
12
in genere toroidali. Tuttavia sono a volte usati anche magneti permanenti quadrati e
magneti a superconduttore a ferro di cavallo.
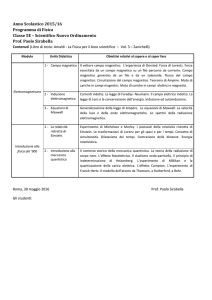
PD-weighted
T2-weighted
T1-weighted
13
RENDERING DI ACQUISIZIONE 3D (T1-weighted)
RENDERING DOPO RIMOZIONE DELLO SCALPO (BRAIN EXTRACTION)
14