Note di Algebra Astratta
Basilio Bona
DAUIN-Politecnico di Torino
2007 – 2008
Basilio Bona (DAUIN-Politecnico di Torino)
Note di Algebra Astratta
2007 – 2008
1 / 47
Introduzione
Lo studio astratto dei gruppi, necessario, ad esempio, per caratterizzare la
nozione di rotazione di corpi rigidi, come pure le nozioni di spazio
vettoriale, di spazio proiettivo e delle algebre vettoriali, richiedono
un’introduzione preliminare alle strutture algebriche più generali. In
particolare, partiremo dalle definizioni di gruppoide, monoide, gruppo,
anello e campo, per inquadrare teoricamente le strutture algebriche
astratte in un unico schema concettuale.
Il lettore interessato potrà trovare materiale di approfondimento nel sito
http://mathworld.wolfram.com/
che rappresenta un buon punto di partenza per cercare definizioni, esempi,
materiale storico e bibliografico sull’Algebra Astratta.
Basilio Bona (DAUIN-Politecnico di Torino)
Note di Algebra Astratta
2007 – 2008
2 / 47
Gruppoide
Un gruppoide (in inglese grupoid) è una delle strutture algebriche più
generali, e viene descritto come {G; ◦}, consistente in un insieme G di
elementi qualsiasi e di un’operazione binaria o operatore binario, indicata
dal simbolo ◦, che non si richiede essere, in generale, né associativa, né
commutativa, ma solo chiusa rispetto agli elementi di G, ossia
se a, b ∈ G, allora anche a ◦ b = c ∈ G.
L’operatore ◦ non è assimilabile ad una “somma” o ad un “prodotto”, in
quanto può essere qualcosa di molto generale, come l’operazione di
concatenazione tra stringhe, il massimo comun divisore tra due interi, il
resto di una divisione, la proiezione in un sottospazio geometrico eccetera.
Tuttavia quando ◦ è riconducibile ad una somma, il gruppoide si dice
additivo, mentre se ◦ è riconducibile ad un prodotto, il gruppoide si dice
moltiplicativo.
Le proprietà di un gruppoide sono comunque troppo generali per essere di
qualche interesse; occorre arricchire la struttura algebrica con altri assiomi.
Basilio Bona (DAUIN-Politecnico di Torino)
Note di Algebra Astratta
2007 – 2008
3 / 47
Semigruppo
Nel semigruppo si introduce la proprietà associativa dell’operazione ◦. Un
semigruppo o gruppoide associativo (in inglese semigroup) è un gruppoide
{G; ◦} in cui l’operatore ◦ è associativo, ossia
se a, b, c ∈ G, allora a ◦ (b ◦ c) = (a ◦ b) ◦ c
Non è richiesta la presenza di un elemento neutro, come accade per il
monoide, o di un elemento identità, come invece accade per il gruppo.
Basilio Bona (DAUIN-Politecnico di Torino)
Note di Algebra Astratta
2007 – 2008
4 / 47
Monoide
Nel definire un monoide si aggiunge agli assiomi del semigruppo quello di
esistenza di un elemento neutro nei confronti dell’operazione ◦.
Un monoide (in inglese monoid) è un semigruppo {M; ◦, u} dotato di un
elemento neutro (o elemento identità o elemento unità) rispetto
all’operazione ◦, indicato con u, tale che
∀a ∈ M, a ◦ u = u ◦ a = a.
Spesso l’elemento neutro viene indicato con il simbolo 0 se l’operazione ◦
è riconducibile alla somma, oppure con il simbolo 1 se l’operazione ◦ è
riconducibile al prodotto. Qui non si ipotizza ancora l’esistenza di un
elemento inverso, che invece viene introdotto tra gli assiomi che
definiscono il gruppo.
Basilio Bona (DAUIN-Politecnico di Torino)
Note di Algebra Astratta
2007 – 2008
5 / 47
Gruppo
Il gruppo (in inglese group) G è una struttura algebrica definita dagli
assiomi del monoide, ai quali si aggiunge quello dell’esistenza dell’elemento
inverso. Questa proprietà rende il gruppo sufficientemente “ricco” di
struttura per rappresentare numerosi enti matematici alla base della fisica
matematica e dell’ingegneria.
Un gruppo è un monoide {G; ◦, u, a−1 }, dotato dell’elemento inverso a−1 .
Ovvero, ∀a ∈ G esiste un elemento a−1 , detto inverso di a, tale che
a ◦ a−1 = a−1 ◦ a = u
In particolare, se a ◦ a−1 = u, l’inverso si dice destro, se invece
a−1 ◦ a = u, l’inverso si dice sinistro.
Se l’operatore ◦ è la somma, l’inverso di a si indica più comunemente con
−a; se invece ◦ è il prodotto, l’inverso di a si indica con a−1 .
La presenza dell’inverso fa sı̀ che ogni gruppo debba contenere almeno un
elemento.
Basilio Bona (DAUIN-Politecnico di Torino)
Note di Algebra Astratta
2007 – 2008
6 / 47
Gruppo Commutativo
Un gruppo G si dice commutativo oppure abeliano, in onore del
matematico norvegese Niels Abel (1802–1829), quando gli argomenti
dell’operatore ◦ possono commutare, ossia
∀a, b ∈ G, a ◦ b = b ◦ a.
In questo caso, l’inverso destro coincide con l’inverso sinistro.
Basilio Bona (DAUIN-Politecnico di Torino)
Note di Algebra Astratta
2007 – 2008
7 / 47
Esempi
Gli insiemi Z, Q, R e C, rispettivamente dei numeri interi, razionali,
reali e complessi, formano gruppi commutativi rispetto all’operazione
di somma, dove ◦ viene sostituito dal simbolo +.
Gli insiemi Q∗ , R∗ e C∗ rispettivamente dei numeri razionali, reali e
complessi non nulli, formano gruppi commutativi rispetto
all’operazione di moltiplicazione, dove ◦ viene sostituito dal simbolo
×.
L’insieme GL(n, R) delle matrici n × n invertibili, formano un gruppo
non commutativo rispetto al prodotto matriciale.
L’insieme SX di tutte le trasformazioni biiettive di un insieme X in sè
stesso, formano un gruppo non commutativo rispetto all’operazione ◦
di composizione delle trasformazioni; ovvero (f ◦ g )(x) = f (g (x)).
Le rotazioni in uno spazio tridimensionale formano un gruppo non
commutativo rispetto al prodotto matriciale. Tale gruppo è detto
gruppo (speciale) di rotazione (ortonormale) e si indica con
n
o
SO(3) = R ∈ R3×3 | RT R = I, det R = +1
In inglese, si chiama Special Orthonormal group of dimension 3
Basilio Bona (DAUIN-Politecnico di Torino)
Note di Algebra Astratta
2007 – 2008
8 / 47
Anello
Un anello (in inglese ring ) A è un sistema {A; +, ·} di elementi a ∈ A,
con due operazioni + e ·, chiamate somma (o addizione) e prodotto (o
moltiplicazione), che soddisfano i seguenti due assiomi:
{A, +} è un gruppo commutativo con elemento neutro indicato con
0, che viene chiamato gruppo additivo dell’anello.
{A, ·} è un semigruppo.
Basilio Bona (DAUIN-Politecnico di Torino)
Note di Algebra Astratta
2007 – 2008
9 / 47
Gli assiomi degli anelli implicano le seguenti proprietà:
proprietà associativa rispetto alla somma:
∀a, b, c ∈ A, (a + b) + c = a + (b + c)
proprietà commutativa rispetto alla somma:
∀a, b ∈ A, a + b = b + a
esistenza dell’elemento neutro o identità rispetto alla somma:
∃0 ∈ A → ∀a ∈ A, 0 + a = a + 0 = a
esistenza dell’elemento inverso rispetto alla somma:
∀a ∈ A → ∃(−a) ∈ A, a + (−a) = (−a) + a = 0
proprietà associativa rispetto al prodotto:
∀a, b, c ∈ A, a · (b · c) = (a · b) · c
proprietà distributiva del prodotto rispetto alla somma:
∀a, b, c ∈ A, a · (b + c) = (a · b) + (a · c)
Basilio Bona (DAUIN-Politecnico di Torino)
Note di Algebra Astratta
2007 – 2008
10 / 47
Un anello contiene sempre almeno un elemento.
Può essere interessante elencare le proprietà che non sono possedute dagli
anelli:
non è richiesto che un anello possieda un elemento neutro o identità
rispetto al prodotto. Se lo possiede, esso prende il nome di unità;
non si esige la validità di alcun assioma dei quozienti; in particolare se
A è dotato di unità, non si esige che un elemento non nullo a 6= 0 sia
dotato di inverso (destro, sinistro o bilaterale);
non si postula la proprietà commutativa del prodotto;
non si postula alcuna legge di annullamento del prodotto1 : possono
cioè esistere anelli dotati di elementi a 6= 0 tali che a · b = 0, oppure
b · a = 0 per qualche b 6= 0; questo implica anche che, se a · b = a · c,
non necessariamente b = c. Si dice che a è un divisore (sinistro) dello
zero, essendo b = a−1 · 0, e che b divide a destra lo zero, essendo
a = 0 · b −1 .
non si richiede che un elemento non nullo a 6= 0 sia dotato di un
elemento inverso.
1
la legge di annullamento del prodotto stabilisce che, dato b 6= 0, se a · b = 0, sia
a = 0.
Basilio Bona (DAUIN-Politecnico di Torino)
Note di Algebra Astratta
2007 – 2008
11 / 47
Esempi
Si pensi alla familiare “algebra delle matrici”, dove non vale in
generale la proprietà commutativa, dove esistono elementi non
invertibili e dove è possibile trovare elementi non nulli il cui prodotto
fornisce un elemento nullo; inoltre si sa che in generale AB = AC non
implica B = C. Quindi l’insieme delle matrici quadrate M ∈ Rn×n ,
con n ≥ 2, forma un anello non commutativo con divisori dello zero.
L’insieme degli interi Z forma un anello {Z, +, ·} con identità, che
però non è un anello di divisione2 .
Sia m un intero e mZ = {n ∈ Z | m divide n} sia l’insieme dei multipli
interi di m. Allora {mZ, +, ·} è un anello, ma privo dell’identità a
meno che non sia m = ±1.
2
vedi oltre
Basilio Bona (DAUIN-Politecnico di Torino)
Note di Algebra Astratta
2007 – 2008
12 / 47
Corpo
Si definisce corpo un anello A, tale che nell’insieme A∗ = A − {0} (ossia
quando A sia stato privato dell’elemento nullo3 ) ogni equazione a · x = b,
oppure y · a = b, ammetta almeno una soluzione x = a−1 · b oppure
y = b · a−1 . Si può dimostrare che A∗ è un gruppo.
Possono esistere corpi commutativi e corpi non commutativi; questi ultimi
sono chiamati anche corpi sghembi, mentre i corpi commutativi sono
conosciuti più comunemente come campi. In inglese i corpi prendono
anche il nome di anelli di divisione (division ring ) o campi sghembi (skew
field).
Tra gli esempi di corpi non commutativi o sghembi si possono citare i
quaternioni.
3
segue che A deve contenere almeno due elementi.
Basilio Bona (DAUIN-Politecnico di Torino)
Note di Algebra Astratta
2007 – 2008
13 / 47
Campo
Se agli assiomi di un anello si aggiunge, con alcune cautele, l’assioma
dell’esistenza di un elemento inverso anche per l’operazione di prodotto, si
ottiene il campo.
Un campo (in inglese field) F è un sistema {F; +, ·} di elementi α ∈ F e
due operazioni + e ·, chiamate somma (o addizione) e prodotto (o
moltiplicazione), che soddisfa i seguenti tre assiomi:
{F, +} è un gruppo commutativo con elemento neutro indicato con
0. Il gruppo {F, +} è detto gruppo additivo del campo.
{F ∗ , ·} è un gruppo commutativo con unità u, indicata con il simbolo
1, dove F ∗ = F − {0}. Il gruppo {F ∗ , ·} è detto gruppo
moltiplicativo del campo.
vale la proprietà distributiva di · rispetto a +, ossia, dati α, β, γ ∈ F
si ha:
α · (β + γ) = α · β + α · γ
che, per altro, era già compresa tra gli assiomi degli anelli.
Basilio Bona (DAUIN-Politecnico di Torino)
Note di Algebra Astratta
2007 – 2008
14 / 47
Campo
Una definizione alternativa è la seguente: un campo è un anello di
divisione (o campo sghembo), con gruppo moltiplicativo commutativo.
Si può osservare che un campo è un corpo commutativo, sia per la
somma, sia per il prodotto.
L’inverso rispetto alla somma si indica con −α, mentre l’inverso rispetto al
prodotto si indica con α−1 .
Esempi
Tra gli esempi più comuni di corpi si trovano il corpo dei numeri reali,
indicati con R e il corpo dei numeri complessi, indicati con C, nonché il
corpo dei numeri razionali Q. In questi casi il generico elemento α di
questi corpi prende il nome di scalare, rispettivamente reale o complesso.
Basilio Bona (DAUIN-Politecnico di Torino)
Note di Algebra Astratta
2007 – 2008
15 / 47
Algebra
La parola algebra deriva dal titolo “Hisab al-jabr w’al-muqabala” di un
trattato dovuto al matematico persiano Muhammed ibn Musa
Al-Khwarizmi4 (circa 780-850) che trattava per la prima volta metodi
algebrici.
Nell’uso moderno, la parola assume diversi significati:
L’algebra che si insegna nelle scuole medie inferiori e superiori,
distinguendola dalla geometria, e che tratta di equazioni polinomiali,
funzioni di una o più variabili, di massimi e minimi ecc. La si chiama
anche algebra elementare o aritmetica.
L’algebra che studia il sistema dei numeri e le loro proprietà,
utilizzando i concetti di gruppo, anello, coomologia, teoria degli
invarianti ecc. Essa prende il nome di algebra astratta.
L’algebra che indica, più tecnicamente, una particolare struttura
formale: in particolare uno spazio vettoriale definito su un campo, con
un operatore prodotto.
4
il cui nome distorto diede origine alla parola algoritmo.
Basilio Bona (DAUIN-Politecnico di Torino)
Note di Algebra Astratta
2007 – 2008
16 / 47
Spazi e Algebre Vettoriali
A noi interessa il terzo significato e quindi, per definire formalmente
un’algebra, è necessario definire prima il concetto e la struttura di uno
spazio vettoriale, i cui elementi rappresentano le entità più interessanti ed
utili per lo studio della meccanica, dell’elettromagnetismo e, in generale, di
molti settori della fisica classica e moderna.
Basilio Bona (DAUIN-Politecnico di Torino)
Note di Algebra Astratta
2007 – 2008
17 / 47
Spazi Vettoriali
Dato un campo qualsiasi F, lo spazio vettoriale (in inglese vector space)
V(F), è l’insieme di quegli elementi, chiamati vettori, che indicheremo
d’ora in avanti con una lettera minuscola in grassetto, come ad esempio v.
I vettori soddisfano le seguenti proprietà assiomatiche:
è definita l’operazione +, detta somma vettoriale, tale che {V(F); +}
forma un gruppo abeliano; l’elemento identità è chiamato 0;
per ogni scalare α ∈ F e ogni vettore v ∈ V(F), esiste un vettore
(prodotto per scalare) αv ∈ V(F);
Basilio Bona (DAUIN-Politecnico di Torino)
Note di Algebra Astratta
2007 – 2008
18 / 47
Spazi Vettoriali
per ogni α, β ∈ F e ogni v, w ∈ V(F) valgono le seguenti proprietà:
I
proprietà associativa rispetto al prodotto per scalare:
α(βv) = (αβ)v
I
proprietà distributiva rispetto alla somma vettoriale:
α(v + w) = αv + αw
I
proprietà distributiva rispetto al prodotto per scalare:
(α + β)v = αv + βv
I
Esistenza dell’identità rispetto al prodotto per scalare:
1(v) = v; ∀v
Se F = R, lo spazio vettoriale è detto reale, mentre se F = C, è detto
complesso.
Basilio Bona (DAUIN-Politecnico di Torino)
Note di Algebra Astratta
2007 – 2008
19 / 47
Vettori
Gli elementi di uno spazio vettoriale si chiamano “vettori”, ma non
dobbiamo fare l’errore di identificare questi generici elementi con i vettori a
cui siamo abituati, cioè i classici segmenti orientati nello spazio, dotati di
direzione, modulo e verso.
Ad esempio, la meccanica quantistica considera “vettori” le matrici reali
2 × 2 e le indica con il simbolo |v i; tali matrici non presentano né una
direzione, né una lunghezza, tuttavia obbediscono agli assiomi che
definiscono lo spazio vettoriale e quindi possono essere a ragione definiti
vettori.
Infatti, qualunque matrice Rm×n o Cm×n può essere pensata come una
lista di mn elementi e quindi rappresentabile come un vettore in Vmn (R) o
Vmn (C).
Basilio Bona (DAUIN-Politecnico di Torino)
Note di Algebra Astratta
2007 – 2008
20 / 47
Indipendenza lineare – Base – Dimensione
Dati n vettori qualsiasi ai ∈ V(F), un vettore generico v ∈ V(F) è detto
combinazione lineare di {a1 , a2 , . . . , an } se esso può essere scritto come
v = λ1 a1 + λ2 a2 + · · · λn an
con λi ∈ F. L’insieme di vettori {a1 , a2 , . . . , an } è detto linearmente
indipendente se nessun elemento ai può essere scritto come combinazione
lineare dei restanti aj , j 6= i. In altre parole, l’unica soluzione
dell’equazione
λ1 a1 + λ2 a2 + · · · λn an = 0
è quella con λ1 = λ2 = · · · = λn = 0.
Basilio Bona (DAUIN-Politecnico di Torino)
Note di Algebra Astratta
2007 – 2008
21 / 47
Indipendenza lineare
Data la combinazione lineare v = λ1 a1 + λ2 a2 + · · · λn an , se tutti i vettori
ai sono linearmente indipendenti, allora gli scalari λi sono unici e prendono
il nome di coordinate o componenti di v.
Le combinazioni lineari di vettori linearmente indipendenti {a1 , a2 , . . . , ak },
con k ≤ n, formano un sottospazio S(F) ⊆ V(F). Si dice che questo
sottospazio è coperto o descritto (in inglese spanned) da {a1 , a2 , . . . , ak }.
Ogni insieme di vettori {a1 , a2 , . . . , an } che risulti linearmente
indipendente, forma una base in V.
Tutte le basi in V hanno lo stesso numero di elementi (nel nostro caso n),
e questo numero prende il nome di dimensione dello spazio e si indica con
dim(V).
Basilio Bona (DAUIN-Politecnico di Torino)
Note di Algebra Astratta
2007 – 2008
22 / 47
Funzioni Lineari
Dati due spazi vettoriali U(F) e V(F), che per comodità assumiamo
definiti entrambi sullo stesso campo F, una funzione L : U → V si dice
lineare, se per ogni a, b ∈ U e λ ∈ F valgono i seguenti assiomi
L(a + b) = L(a) + L(b) = La + Lb
L(λa) = λL(a) = λLa
(1)
Una funzione lineare L : U → U viene chiamata anche operatore lineare,
trasformazione lineare oppure endomorfismo (in inglese endomorphism).
L’insieme di tutte le funzioni lineari L : U → V forma uno spazio lineare
L(F).
L’insieme delle funzioni lineari L : U → U forma un anello, indicato con il
simbolo End(U).
Ricordiamo infine che qualsiasi funzione lineare da U a V è rappresentabile
con una matrice M ∈ Rm×n , dove m e n sono le dimensioni
rispettivamente di V e U.
Basilio Bona (DAUIN-Politecnico di Torino)
Note di Algebra Astratta
2007 – 2008
23 / 47
Funzione iniettiva, suriettiva e biiettiva
La funzione o trasformazione f : A → B, tra due insiemi generici A e B si
dice essere iniettiva (in inglese injective oppure one-to-one function) se
∀a, b ∈ A, f (a) = f (b)
implica a = b
ossia ad ogni elemento dell’immagine A della funzione corrisponde uno ed
un solo elemento del dominio B della funzione.
La funzione o trasformazione f : A → B, tra due insiemi generici A e B si
dice essere suriettiva (in inglese surjective oppure onto function) se
f (A) = B
ossia la trasformazione del dominio della funzione copre (in inglese spans)
ovvero coincide integralmente con l’intera immagine.
La funzione o trasformazione f : A → B, tra due insiemi generici A e B si
dice essere biiettiva (in inglese one-to-one correspondence) se f è
contemporaneamente iniettiva e suriettiva.
Basilio Bona (DAUIN-Politecnico di Torino)
Note di Algebra Astratta
2007 – 2008
24 / 47
Morfismo e isomorfismo
Prendiamo due strutture algebriche dello stesso tipo universale (come, ad
esempio, due gruppi, due anelli, o due algebre), X e Y. Definiamo
morfismo una generica trasformazione tra X e Y.
L’isomorfismo è un morfismo biiettivo.
In particolare, dati due spazi vettoriali U(F) e V(F), definiti sullo stesso
campo F, questi si dicono isomorfi, se tra loro sussiste un isomorfismo (in
inglese isomorphism), ovvero se esiste una trasformazione lineare biiettiva
fu : vi = fu ui tra vettori ui ∈ U e vettori vi ∈ V tale che
fu (λ1 u1 + λ2 u2 ) = λ1 fu (u1 ) + λ2 fu (u2 )
e similmente esiste una trasformazione lineare biiettiva fv : ui = fv vi tra
vettori vi ∈ V e vettori ui ∈ U tale che
fv (λ1 v1 + λ2 v2 ) = λ1 fv (v1 ) + λ2 fv (v2 )
Un isomorfismo è dunque una trasformazione biiettiva che conserva tutte
le relazioni lineari e conseguentemente la struttura algebrica degli spazi
vettoriali coinvolti.
Basilio Bona (DAUIN-Politecnico di Torino)
Note di Algebra Astratta
2007 – 2008
25 / 47
Endomorfismo e automorfismo
Possiamo ora stabilire, senza dimostrarlo, il seguente teorema:
TEOREMA: ogni spazio vettoriale a n dimensioni Vn (F) definito sul
campo F è isomorfo allo spazio F n delle n-ple di scalari del campo F.
Se F = R, questo teorema permette di affermare che possiamo
concentrare la nostra attenzione sulle n-ple di reali, senza perdere in
generalità, perché ogni altro “tipo” di vettore sarà isomorfo a queste
ultime. Infatti l’isomorfismo conserva le operazioni e conserva pure gli
assiomi.
L’endomorfismo è un morfismo suriettivo da X a X , cioè in sé stesso.
L’automorfismo è un isomorfismo da X a X , cioè in sé stesso.
Basilio Bona (DAUIN-Politecnico di Torino)
Note di Algebra Astratta
2007 – 2008
26 / 47
Vettori
L’esempio classico di spazio vettoriale reale è quello rappresentato da n-ple
di reali, Vn (R) = Rn ; in questi casi un elemento (vettore) viene
rappresentato per componenti
v1
v2
n
v=
... , v ∈ R , vi ∈ R
vn
Poiché le proprietà dello spazio vettoriale inducono una struttura lineare
sullo spazio V, esso viene indicato anche con il termine di spazio vettoriale
lineare o semplicemente spazio lineare (in inglese linear vector space o
semplicemente linear space).
Inoltre, come si può notare, tra gli assiomi non compare alcuna operazione
di prodotto.
Basilio Bona (DAUIN-Politecnico di Torino)
Note di Algebra Astratta
2007 – 2008
27 / 47
Metrica
La struttura dello spazio vettoriale, ossia l’insieme di proprietà che
derivano dagli assiomi, non permette di definire concetti geometrici quali
l’angolo o la distanza, che invece sono impliciti nella definizione puramente
geometrica di vettore. Per consentire di definire tali concetti è necessario
dotare lo spazio vettoriale di una struttura quadratica o metrica.
L’introduzione di una metrica in uno spazio vettoriale genera un’algebra
che rende possibile l’esecuzione di calcoli su oggetti geometrici. La metrica
più comune è quella indotta dalla definizione di prodotto scalare.
Basilio Bona (DAUIN-Politecnico di Torino)
Note di Algebra Astratta
2007 – 2008
28 / 47
Prodotto scalare o interno
Abbiamo visto che la struttura assiomatica di spazio vettoriale non
comprende la definizione di un prodotto, mentre per calcolare con enti
geometrici è necessario introdurre una struttura quadratica o metrica; una
delle metriche più comuni è quella derivata dal prodotto scalare o interno
tra vettori.
Dati due vettori reali a, b ∈ V(R), il prodotto scalare o interno (in inglese
scalar o inner product) a · b è un numero reale che può venire definito sia
in modo geometrico sia in modo analitico (per componenti):
definizione geometrica:
definizione analitica:
a · b = kak kbk cos θ
X
a·b=
ak bk = aT b
(2)
(3)
k
dove θ, (0◦ ≤ θ ≤ 180◦ ) è l’angolo compreso tra a e b.
Basilio Bona (DAUIN-Politecnico di Torino)
Note di Algebra Astratta
2007 – 2008
29 / 47
Norma e angolo
La definizione geometrica implica di aver preventivamente definito il
concetto di angolo e di lunghezza, mentre nell’approccio analitico la
lunghezza ovvero la norma (in inglese norm) può essere definita come
grandezza derivata dal prodotto scalare
sX
√
√
kak = a · a =
ak2 = aT a
(4)
k
e l’angolo come
−1
θ = cos
a·a
kak kbk
La metrica è dunque definita a partire dal prodotto scalare e si chiamano
spazi Euclidei o Cartesiani quelli per cui vale la metrica (4).
Basilio Bona (DAUIN-Politecnico di Torino)
Note di Algebra Astratta
2007 – 2008
30 / 47
Assiomi del prodotto scalare
Il prodotto scalare · non corrisponde al prodotto ◦ che appare nella
definizione di gruppo; infatti il prodotto scalare opera su due vettori e
genera uno scalare, mentre il prodotto ◦ genera un vettore.
Il prodotto scalare soddisfa i seguenti assiomi
Proprietà distributiva rispetto alla somma:
(a + b) · c = a · c + b · c
Proprietà distributiva rispetto al prodotto per scalare:
α(a · b) = (αa) · b = a · (αb)
Proprietà commutativa:
a·b=b·a
Positività:
a · a > 0, ∀a 6= 0
Nota: spesso il prodotto scalare tra a e b viene indicato con aT b, ma qui
preferisco indicarlo con il più generale a · b per mettere in evidenza il suo
significato geometrico.
Basilio Bona (DAUIN-Politecnico di Torino)
Note di Algebra Astratta
2007 – 2008
31 / 47
Algebra Vettoriale
Dato un campo F, un’algebra vettoriale (in inglese vector algebra o linear
algebra) è uno spazio lineare (vettoriale) V(F) dotato di un operatore
(prodotto) bilineare5 tra vettori, che indicheremo con il generico simbolo
◦, e che obbedisce al seguente assioma: dato λ ∈ F e a, b ∈ V, risulta
λ(a ◦ b) = (λa) ◦ b = a ◦ (λb)
Esistono numerose algebre; tra queste citiamo, oltre all’algebra delle
matrici, l’algebra di Clifford, l’algebra di Lie e l’algebra dei quaternioni, che
sono utili nello studiare gli aspetti geometrici e cinematici della robotica e
della computer vision.
5
bilineare significa “lineare rispetto a entrambi gli operandi”. Questa proprietà
implica la proprietà distributiva; in altre parole la proprietà distributiva è implicita in
un’algebra.
Basilio Bona (DAUIN-Politecnico di Torino)
Note di Algebra Astratta
2007 – 2008
32 / 47
Il prodotto ◦
In generale il prodotto ◦ non coincide con il prodotto scalare, perché
quest’ultimo non è un prodotto tra vettori che dia come risultato un
vettore. Tuttavia il prodotto scalare si dimostra dotato di sufficiente
struttura da risultare utile per la maggior parte delle applicazioni necessarie
al calcolo geometrico.
Un altro prodotto comunemente utilizzato nella fisica è il prodotto
esterno, che però vale solo in spazi vettoriali a dimensione 3.
Come vedremo, le proprietà del prodotto esterno non sono ancora quelle
che si vorrebbero possedute da un generico prodotto tra vettori, ma
tuttavia anch’esso svolge una funzione essenziale nella descrizione della
cinematica e della dinamica dei manipolatori, nonchè di numerose
proprietà dell’elettromagnetismo.
Basilio Bona (DAUIN-Politecnico di Torino)
Note di Algebra Astratta
2007 – 2008
33 / 47
Prodotto vettoriale o esterno - 1
T
T
Dati due vettori x = x1 x2 x3 e y = y1 y2 y3 , con x, y ∈ R3 ,
il prodotto vettoriale o esterno (in inglese outer o external o vector
product) x × y è un vettore che soddisfa le relazioni seguenti:
x2 y3 − x3 y2
(5)
z = x × y = x3 y1 − x1 y3
x1 y2 − x2 y1
La (5) può essere scritta come prodotto della matrice antisimmetrica S(x)
per il vettore y:
0 −x3 x2
0 −x1 y = S(x)y
(6)
x × y = x3
−x2 x1
0
Le proprietà delle matrici antisimmetriche e i loro utilizzi sono descritte
altrove.
Basilio Bona (DAUIN-Politecnico di Torino)
Note di Algebra Astratta
2007 – 2008
34 / 47
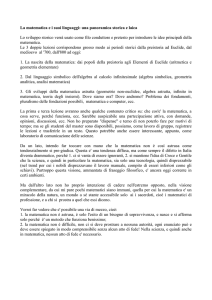
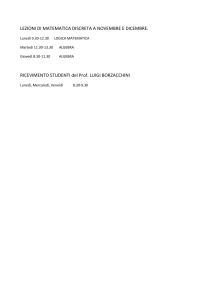
Prodotto vettoriale o esterno - 2
La norma del prodotto esterno vale
kzk = kxk kyk sin θ
(7)
dove θ è l’angolo tra i due vettori x e y misurato sul piano xy definito da
questi ultimi; la direzione di z è ortogonale al piano xy , il verso è dato
dall’applicazione della regola della mano destra , per portare x su y
compiendo la rotazione di angolo minimo.
Figura: regola della mano destra applicata al prodotto vettoriale.
Basilio Bona (DAUIN-Politecnico di Torino)
Note di Algebra Astratta
2007 – 2008
35 / 47
Proprietà del prodotto esterno
Il prodotto vettoriale soddisfa le seguenti proprietà:
x×x=0
x × y = − (y × x) ; anticommutativo
x × (y + z) = (x × y) + (x × z) ; distributivo rispetto alla somma
α (x × y) = (αx) × y = x × (αy) ; distributivo rispetto al prodotto per
scalare
x × (y × z) 6= (x × y) × z; non è associativo
Basilio Bona (DAUIN-Politecnico di Torino)
Note di Algebra Astratta
2007 – 2008
36 / 47
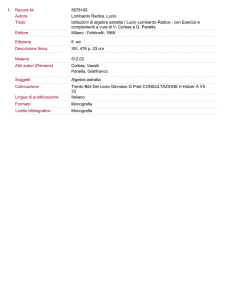
Prodotto triplo scalare
Dati tre vettori tridimensionali x, y, z, si definisce prodotto triplo scalare
il prodotto
z · (x × y)
Geometricamente il prodotto triplo scalare ha norma kx · (y × z)k pari al
volume del parallelepipedo generato dai tre vettori, in quanto ky × zk è
l’area della base e kx cos θk è l’altezza.
Figura: prodotto triplo scalare.
Basilio Bona (DAUIN-Politecnico di Torino)
Note di Algebra Astratta
2007 – 2008
37 / 47
Prodotto triplo scalare
Risulta poi evidente che valgono le seguenti identità
z · (x × y) = x · (y × z) = y · (z × x)
(8)
perché il prodotto corrisponde al volume dello stesso solido (area base ×
altezza); va notato come si conserva l’ordine ciclico dei vettori.
Inoltre vale la relazione
x · (y × z) = (x × y) · z
che segue dalla (8) e dalla commutatività del prodotto scalare.
Notate come la posizione della parentesi sia critica: infatti scrivere
(x · y) × z non avrebbe alcun significato, trattandosi di un prodotto
vettoriale tra uno scalare e un vettore.
Basilio Bona (DAUIN-Politecnico di Torino)
Note di Algebra Astratta
2007 – 2008
38 / 47
Prodotto triplo vettoriale
Dati tre vettori tridimensionali x, y, z, si definisce prodotto triplo
vettoriale il prodotto esterno triplo non associativo, ossia:
x × (y × z) = (x · z) y − (x · y) z
(x × y) × z = (x · z) y − (y · z) x
(9)
Dati i vettori x, y, z, w, valgono le seguenti relazioni:
(x × y) · z = − (z × y) · x
(x × y) · (z × w) = (x · z)(y · w) − (x · w)(y · z)
x × (y × (z × w)) = y(x · (z × w)) − (x · y)(z × w)
(10)
Il prodotto vettoriale è definito solo in spazi vettoriali di dimensione 3; la
generalizzazione di questo prodotto a spazi n-dimensionali, con n > 3,
richiede di introdurre le algebre di Clifford, cosa che va oltre gli scopi di
queste slide.
Basilio Bona (DAUIN-Politecnico di Torino)
Note di Algebra Astratta
2007 – 2008
39 / 47
Prodotto diadico - 1
Dati due vettori x, y ∈ Rn , si
x1 y1
..
:=
xy
.
xn y1
definisce prodotto diadico il seguente
. . . x1 yn
.. ≡ xyT ≡ D(x, y)
xi yi
.
. . . xn yn
Bisogna notare che alcuni testi anglosassoni chiamano questo prodotto
external product, generando confusione con il prodotto vettoriale.
Il prodotto diadico non è commutativo in quanto, essendo
D(x, y) = DT (y, x)
risulta x y 6= y x.
La matrice D che si ottiene come risultato del prodotto diadico risulta
sempre avere rango ρ(D) = 1, qualunque sia la dimensione n dei vettori di
partenza.
Basilio Bona (DAUIN-Politecnico di Torino)
Note di Algebra Astratta
2007 – 2008
40 / 47
Prodotto diadico - 2
Una proprietà utile che lega il prodotto vettoriale triplo e il prodotto
diadico (per vettori tridimensionali) è la seguente
x × (y × z) = [(x · z) I − z x] y
(x × y) × z = [(x · z) I − x z] y
È interessante sottolineare che, mentre il prodotto esterno al primo
termine delle relazioni precedenti è definito solo per vettori tridimensionali,
i prodotti al secondo termine si possono calcolare indipendentemente dalle
dimensioni dello spazio vettoriale.
Basilio Bona (DAUIN-Politecnico di Torino)
Note di Algebra Astratta
2007 – 2008
41 / 47
Altri prodotti tra vettori
Poiché il prodotto interno è un prodotto tra vettori che fornisce uno scalare
ed il prodotto esterno non è associativo, nasce la necessità di definire un
prodotto ab tra vettori che obbedisca alla maggior parte delle regole della
moltiplicazione “ordinaria”, ovvero possegga almeno le proprietà di essere
associativo e distributivo, mentre la commutatività non è essenziale.
Si richiede anche che venga preservata la norma, ossia kabk = kak kbk.
Sono stati definiti in passato prodotti tra vettori che soddisfano questi
requisiti. Di solito essi vengono trascurati nei testi elementari di algebra
vettoriale.
Tra questi, un qualche interesse per l’applicazione alla cinematica teorica e
alla computer vision, oltreché nella fisica quantistica, rivestono il prodotto
di Hamilton e il prodotto di Clifford.
Basilio Bona (DAUIN-Politecnico di Torino)
Note di Algebra Astratta
2007 – 2008
42 / 47
Prodotto di Hamilton
Il prodotto di Hamilton trova la sua giustificazione nell’ambito della
definizione di prodotto tra quaternioni, entità che approfondiremo meglio
più avanti.
Qui ci limitiamo a definire tale prodotto nel modo seguente
ab := −a · b + a × b
(11)
Questo prodotto ha ora solo più un significato storico, in quanto presenta
la spiacevole caratteristica di fornire un numero negativo come risultato
del prodotto di un vettore per sé stesso
aa = −a · a + a × a = − kak2
(12)
Esso fu presto abbandonato in favore di altri più semplici o più utili, come
i precedenti prodotti interno ed esterno, oppure più generali dal punto di
vista geometrico, come il prodotto di Clifford.
Basilio Bona (DAUIN-Politecnico di Torino)
Note di Algebra Astratta
2007 – 2008
43 / 47
Prodotto di Clifford - 1
È stato dimostrato che un prodotto vettoriale che permetta di soddisfare
gli stessi assiomi del prodotto tra due numeri reali, ossia la distributività,
l’associatività e la commutatività, non esiste per spazi vettoriali con
dimensioni n ≥ 3.
Se si lascia cadere l’assioma della commutatività, si può definire il
prodotto di Clifford, dal nome del matematico inglese William Clifford
(1845-1879) che per primo lo introdusse. Esso consente di estendere a
spazi vettoriali Rn , con n > 3, il prodotto esterno.
Basilio Bona (DAUIN-Politecnico di Torino)
Note di Algebra Astratta
2007 – 2008
44 / 47
Prodotto di Clifford - 2
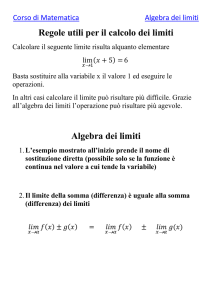
Limitiamoci in un primo momento, per semplicità, al piano R2 .
Dati due vettori a = a1 i + a2 j, e b = b1 i + b2 j, il prodotto di Clifford
risulta essere definito come:
ab := a1 b1 + a2 b2 + (a1 b2 − a2 b1 )e12 = a · b + (a1 b2 − a2 b1 )e12
(13)
dove e12 prende il nome di bivettore. Esso è definito come l’area dotata di
segno del parallelogrammo compreso tra i e j; in un certo senso è analogo
al prodotto esterno i × j, salvo il fatto che quest’ultimo è interpretato
come vettore ortogonale al piano in cui sono contenuti i e j, mentre il
bivettore è da interpretarsi come un’area (in inglese patch ossia “pezza” )
nel medesimo piano, come illustrato in Figura.
Figura: Il bivettore e12 nel piano R3 .
Basilio Bona (DAUIN-Politecnico di Torino)
Note di Algebra Astratta
2007 – 2008
45 / 47
Prodotto di Clifford - 3
L’estensione allo spazio R3 si ottiene assumendo che sia verificata la
seguente identità:
cc = c2 = c · c
(14)
se poi consideriamo c = a + b, otteniamo:
(a + b)(a + b) = (a + b) · (a + b)
(15)
da cui segue
aa + ab + ba + bb = a · a + a · b + b · a + b · b
e quindi
ab + ba = 2a · b
ovvero
ab = 2a · b − ba
Basilio Bona (DAUIN-Politecnico di Torino)
Note di Algebra Astratta
(16)
2007 – 2008
46 / 47
Derivata di vettori
In generale i vettori che rappresentano punti geometrici o grandezze fisiche
e cinematiche sono funzioni del tempo t. La derivata rispetto al tempo di
un vettore è anch’essa un vettore, definito come segue
ẋ
(t)
1
d
x(t) = ẋ(t) = ẋ2 (t)
dt
ẋ3 (t)
(17)
In modo analogo si definiscono derivate di ordine superiore, a partire dalla
derivata seconda
ẍ
(t)
1
d
ẋ(t) = ẍ(t) = ẍ2 (t)
(18)
dt
ẍ (t)
3
Le derivate del prodotto scalare e vettoriale soddisfano le consuete
proprietà della derivata di un prodotto:
d(x · y)
= ẋ · y + x · ẏ
dt
Basilio Bona (DAUIN-Politecnico di Torino)
e
d(x × y)
= (ẋ × y) + (x × ẏ)
dt
Note di Algebra Astratta
2007 – 2008
(19)
47 / 47