Università del Sannio
Corso di Fisica 1
Lezione 4
Cinematica II
Prof.ssa Stefania
Petracca
Corso di Fisica 1 - Lez. 04 Cinematica II
1
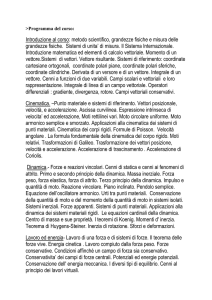
Vettore posizione
Per poter generalizzare i concetti
introdotti nella lezione
precedente al caso
bidimensionale, e
successivamente a quello
tridimensionale, occorre
riprendere alcuni concetti sui
vettori ed applicarli in maniera
pratica per i nostri intenti.
Innanzitutto bisogna sottolineare
che la posizione di un
qualsiasi corpo nello spazio è
un vettore. Quindi una generica
posizione nel piano deve essere
intesa come una grandezza
vettoriale. Dalla figura si nota
facilmente quanto affermato.
Corso di Fisica 1 - Lez. 04 Cinematica II
2
Vettore spostamento I
A seguito della natura vettoriale della
posizione segue a ruota che anche lo
spostamento (cioè la variazione tra due
posizioni consecutive) deve essere
inteso come un vettore. Infatti …
Corso di Fisica 1 - Lez. 04 Cinematica II
3
Vettore spostamento II
Bisogna notare che gli spostamenti possono non avere nulla in comune con il percorso
effettivo di un corpo al variare del tempo. Inoltre Il tempo non compare esplicitamente e il
concetto di vettore posizione contiene implicitamente il fatto che si sta osservando un moto
prendendo misure a tempi diversi. Più vicini tra loro sono i tempi, più è plausibile pensare
che gli spostamenti avvengono sulla traiettoria. Se dovessero mancare indicazioni sui tempi
il moto può solo essere estrapolato. Infine la traiettoria è la curva percorsa nello spazio,
senza nessun riferimento al tempo. La palla rossa potrebbe essere stata ferma in una
qualsiasi posizione, senza che dal grafico questo traspaia. Le stesse traiettorie possono
essere percorse in modo diverso, con diverse velocità, diverse fermate, diverse
accelerazioni.
Corso di Fisica 1 - Lez. 04 Cinematica II
4
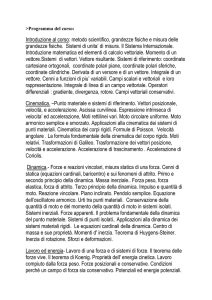
Vettore spostamento III
Lo spostamento totale su un percorso chiuso è nullo,
mentre la distanza percorsa non lo è.
In figura si riporta i vettori spostamento
mano a mano che l’intervallo di tempo
dt diminuisce. Si può estrapolare che
mano a mano che dt diventa più
piccolo, il modulo del vettore
spostamento |dr|=|r(t+dt) - r(t)| e la
lunghezza del tratto di traiettoria ds
tendono a coincidere. La retta su cui
giace il vettore spostamento, mano a
mano che dt diminuisce, tende a
essere tangente alla curva che
descrive la traiettoria: dr = ds τ con τ
versore (vettore di modulo 1) che giace
sulla retta tangente alla traiettoria nel
punto e che punta nella direzione
in cui avviene il moto.
Corso di Fisica 1 - Lez. 04 Cinematica II
5
Velocita’ media vettoriale
Estendiamo al caso bidimensionale il concetto di velocità media considerando il rapporto della
differenza tra due posizioni (in due istanti di tempo diversi) con l’intervallo di tempo stesso. La
velocità media, quindi, è un vettore ed indica la rapidità con cui un corpo si muove in una data
direzione e verso nell’intervallo di tempo considerato.
Una conseguenza fondamentale del concetto di
velocità media è che se la valutiamo su un
intervallo di tempo in cui la posizione iniziale e
quella finale coincidono otteniamo il vettore nullo
(velocità media nulla). Questa conclusione
discende direttamente dal fatto che su un
percorso chiuso il vettore spostamento è nullo.
Corso di Fisica 1 - Lez. 04 Cinematica II
6
Velecita’ istantanea vettoriale I
La velocità ad un certo istante di tempo viene definita a partire dalla velocità
media, considerando intervalli di tempo sempre più corti (si deve ipotizzare di
avere valori di misura della posizione per molti valori di tempo vicini tra loro. La
velocità istantanea è definita come il processo al limite del rapporto spostamento
diviso per l’intervallo di tempo, quando questo diventa sempre più piccolo (tende
a zero). Poiché sia lo spostamento che l’intervallo di tempo tendono a zero, il loro
rapporto, è un valore definito. La direzione della velocità istantanea (chiamata
d’ora in poi velocità) è definita dalla tangente geometrica alla traiettoria nel punto
considerato, nel verso della percorrenza delle traiettoria.
Corso di Fisica 1 - Lez. 04 Cinematica II
7
Velecita’ istantanea vettoriale II
Se la legge oraria r(t) è nota analiticamente, la velocità limite si ottiene con l’operazione di derivazione
L’operazione di derivazione di un vettore non è diversa da quella di una funzione (scalare) se si
conoscono le leggi orarie per le componenti x(t), y(t), z(t) del vettore posizione r(t). Infatti poiché è
sempre vero
per la regola della derivata della somma e dei prodotti (tenere in conto che i versori i, j, k sono costanti,
non variano con il tempo … quindi si comportano come le costanti nella derivazione)
Le componenti del vettore velocità sugli assi cartesiani sono date da
Corso di Fisica 1 - Lez. 04 Cinematica II
8
Accelerazione media vettoriale
Accelerazione media è calcolata come il rapporto tra le variazioni di velocità
istantanea relativi a due istanti di tempo:
Graficamente l’accelerazione media è interpretabile come segue
Corso di Fisica 1 - Lez. 04 Cinematica II
9
Accelerazione istantanea vettoriale
L’accelerazione ad un certo istante di tempo viene definita a partire dalla velocità media,
considerando intervalli di tempo sempre più brevi (si deve ipotizzare di avere valori di
misura della velocità istantanea per molti valori di tempo, vicini tra loro). L’accelerazione
istantanea (chiamata d’ora in poi accelerazione) è definita come il processo al limite del
quoziente tra variazione di velocità e l’intervallo di tempo in cui la variazione avviene, per
intervalli di tempo (e quindi variazioni di velocità) sempre più piccoli:
La accelerazione è nulla se la velocità non varia nel tempo (velocità costante). La
velocità è un vettore, e può essere costante in modulo (vedere moto circolare uniforme)
ma variare in modulo e direzione, e quindi l’accelerazione in questo caso non è nulla. La
direzione dell’accelerazione istantanea è determinata dalla differenza tra i vettori velocità
per istanti molto vicini tra loro. Matematicamente possiamo scrvere
Corso di Fisica 1 - Lez. 04 Cinematica II
10
In definitiva … la cinematica vettoriale
La velocità istantanea e l’accelerazione istantanea sono definite come le funzioni
(vettoriali) che si ottengono derivando nel tempo rispettivamente la funzione posizione e la
funzione velocità
Questo significa che è possibile conoscendo la funzione accelerazione in funzione del
tempo trovare la funzione velocità in funzione del tempo; successivamente integrando la
funzione velocità è possibile trovare la funzione posizione
Il moto è allora determinato a meno di due costanti (costanti di integrazione). Le condizioni
iniziali permettono di determinare in modo univoco il moto, dando la possibilità di definire i
valori delle costanti. (Gli integrali di funzioni vettoriali sono la somma degli integrali delle
componenti)
Corso di Fisica 1 - Lez. 04 Cinematica II
11
Moto circolare uniforme I
Si definisce moto circolare uniforme il moto di un corpo che descrive archi uguali in intervalli
di tempo uguali. A differenza del moto a velocità costante su una retta, ora la velocità
media (nel senso di vettore) cambia in direzione e verso, anche se il suo valore (modulo del
vettore velocità media) rimane uguale: questo comporta che nel moto circolare uniforme vi
sia un’accelerazione (variazione di velocità nel tempo). Riportiamo in grafico alcuni esempi
di spostamento durante il moto su una circonferenza.
Il generico vettore posizione, oltre alla scelta di un sistema di
coordinate cartesiane, può essere rappresentato in coordinate
polari. In tal caso bisogna assegnare un angolo e la distanza del
punto dall’origine degli assi.
Corso di Fisica 1 - Lez. 04 Cinematica II
12
Moto circolare uniforme II
Dato che il moto è uniforme possiamo affermare: archi uguali sono percorsi in intervalli
di tempi uguali. Quindi anche angoli uguali in intervalli di tempi uguali: l’angolo al centro
cresce proporzionalmente al tempo: θ(t) = ω t, con ω = costante. Poiché ω è costante
dθ(t) /dt= ω. ω viene chiamata velocità angolare e si misura in rad/s. Dato che il corpo in
moto dopo un giro ritorna ad avere le stesse posizione si introduce il concetto di periodo T
come il tempo necessario per compiere un giro completo. Quindi deve essere soddisfatta la
condizione 2 π = ω T ovvero T = 2 π / ω. Infine di notevole interesse è la cosiddetta
frequenza: numero di giri per unità di tempo. ν = 1 / T = ω / 2 π.
Calcoliamo esplicitamente tutte le grandezze necessarie allo studio completo del moto
circolare uniforme. Il generico punto sulla circonferenza ha come coordinate:
Il vettore velocità è
Il modulo della velocità lineare v e della velocità
angolare ω sono collegate dalla relazione |v| = r
ω. Dato ω, costante, la velocità lineare |v|
aumenta linearmente con l’aumentare del raggio
della circonferenza.
Infatti, a parità di angolo percorso, più ci allontana dal centro, maggiore è l’arco che si deve
percorrere, nello stesso tempo. Si può verificare, che le due espressioni per v(t) e r(t) verificano
che v·r = 0 (i due vettori sono perpendicolari).
Corso di Fisica 1 - Lez. 04 Cinematica II
13
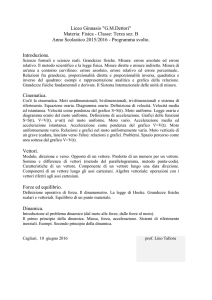
Moto circolare uniforme III:
accelerazione centripeta
Grafichiamo a due istanti di tempo diversi i vettori velocità (tangenti alla circonferenza).
Attraverso considerazioni geometriche otteniamo il valore dell’accelerazione:
Quando Δt tende a zero Δ v / Δ t tende
al valore dell’accelerazione (in modulo),
Δ r / Δ t al valore della velocità (in
modulo). L’accelerazione, in modulo,
vale quindi:
N.B. AA’ perpendicolare a OA, e BB’
perpendicolare a OB, per cui l’angolo
(BOP) è uguale all’angolo (A’AB’). I
triangoli sono isosceli, e avendo uguali
gli angoli al vertice, hanno uguali gli
angoli di base. Le basi sono tra loro
perpendicolari.
Corso di Fisica 1 - Lez. 04 Cinematica II
14
Moto circolare uniforme IV:
accelerazione centripeta
I vettori Δ v e Δ r sono tra loro ortogonali. Quando Δ t tende a 0, il vettore Δ r tende a d r,
perpendicolare a r la tangente alla circonferenza. Δ v tende a d v, perpendicolare alla
tangente, antiparallelo a r, ovvero diretto verso il centro, in verso opposto a quello del
vettore r: l'accelerazione è diretta verso il centro: accelerazione centripeta
Corso di Fisica 1 - Lez. 04 Cinematica II
15
Moto circolare uniforme V:
accelerazione centripeta
Eseguendo la derivata temporale in coordinate cartesiane del vettore velocità
precedentemente calcolato, abbiamo:
Tenendo conto della relazione che lega velocità lineare e velocità angolare, si ritrova la
relazione tra velocità lineare e accelerazione centripeta.
Corso di Fisica 1 - Lez. 04 Cinematica II
16
Moto circolare uniformemente
accelerato
Se il moto è circolare ma non uniforme abbiamo una variazione temporale sia del modulo
della velocità sia della velocità angolare.
L’accelerazione può essere scomposta in due componenti: tangenziale at = r α, con α
accelerazione angolare e ac= ω2r = v2 / r (accelerazione centripeta) sempre presente.
In una traiettoria curva qualsiasi, generalmente
sono presenti entrambe. In questo caso è
possibile tuttavia supporre per piccoli tratti della
traiettoria un moto circolare. In questo caso si
parlerà di cerchio osculatore.
Corso di Fisica 1 - Lez. 04 Cinematica II
17
Moto parabolico I
Il moto parabolico è costituito da due moti indipendenti: sull’asse x con acc. Nulla (moto
rettilineo ed uniforme) e sull’asse z con accelerazione costante (moto uniformemente
accelerato) diretta verso il basso (-g).
Integrando le equazioni per le accelerazioni lungo
i due assi otteniamo le relazioni che legano le
velocità al tempo
Corso di Fisica 1 - Lez. 04 Cinematica II
18
Moto parabolico II
La velocità lungo l’asse z, vz, prima diminuisce a causa della presenza di un’accelerazione
negativa, successivamente si annulla ad un certo tempo e poi in valore assoluto cresce
(ma con un segno meno). La derivata prima è sempre negativa e costante. La velocità
lungo l’asse x, vx, rimane costante. Tali velocità sono riportate di seguito
Infine integrando le relazioni per le velocità
otteniamo le leggi orarie per i due moti
Le leggi orarie sono
Corso di Fisica 1 - Lez. 04 Cinematica II
19
Moto parabolico III
La quota massima raggiunta dal corpo in caduta corrisponde all’istante di tempo in cui si
annulla la velocità lungo l’asse z :vz(tm) = 0
Per v0 = 0 (velocità iniziale nulla) e per α
= 0 (velocità iniziale orizzontale), la
quota massima è la quota iniziale z0;
per α = 90° (velocità iniziale verticale)
z(tm)= z0+(v0)2/2g.
Corso di Fisica 1 - Lez. 04 Cinematica II
20
Moto parabolico IV
Definiamo la gittata come lo spazio percorso in direzione orizzontale. La funzione x(t) è una
funzione crescente linearmente nel tempo ed il suo massimo corrisponde all’istante in cui il
moto termina (coordinata z nulla).
xG = x(t f ) =
(
v0 cos α
v0 sin α + v0 2 sin 2 α + 2 gz0
g
Nel caso di quota nulla (z0 = 0) la massima gittata
dipende soltanto dall’angolo di sparo. Ed in
particolare vale 45°.
Riportiamo due semplici esempi per
una descrizione visiva del moto
parabolico.
Corso di Fisica 1 - Lez. 04 Cinematica II
21
)