Programma del Corso
Definizioni e grandezze fondamentali
z
y
z
Sensibilità, risoluzione, selettività….
y
y
y
y
y
Elettronica per sensori
z
y
y
y
Generatori di tensione e corrente
Op. amp
Ponti di resistenze
Sensori di temperatura
z
y
y
y
y
y
y
y
y
y
z
Tecniche ottiche
Fibre ottiche
Fotoconduttori
Fotovoltaici
fotocatodi
Bolometri e piroelettrici
z
Deformazione
Spostamento
Accelerazione e forza
Flusso
Pressione
Sensori Chimici
y
y
y
y
Termistori
Termocoppie
Piroelettrici
Sensori di radiazione
z
Sensori Meccanici
Interazione gas-solido
ChemFET
Trasduzione di massa
Chemoresistenze
Calibrazione di sensori
y
y
Regressione statistica
Introduzione alle reti neurali
Corrado Di Natale, Sensors and Microsystems Group
Sensori: definizione
z Sensori, trasduttori e attuatori (una definizione possibile)
Grandezza
qualsiasi
trasduttore
Grandezza
qualsiasi
z
sensore
attuatore
Grandezza
elettrica
Sensore: Dispositivo Elettronico che converte una grandezza fisica, chimica o biologica in
un segnale elettronico.
y
y
Termometro clinico: temperatura Æ lunghezza non è un sensore
Termistore: temperatura Æ resistenza elettrica è un sensore
z Il sensore è quindi un componente di un circuito elettronico che lega le grandezze del
circuito (corrente, tensione, frequenza o fase) ad una o più grandezze ambientali.
Corrado Di Natale, Sensors and Microsystems Group
1
La catena di trasduzione
z
z
Generalmente un sensore è costituito di una serie di elementi in cui la grandezza
“misurata” viene trasdotta in grandezze intermedie fino ad arrivare al segnale
elettrico.
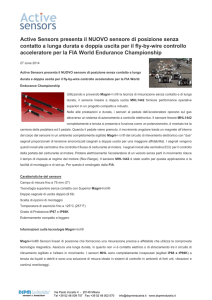
Esempio: accelerometro
fla
R(a )
Da
M
C(a)
accelerazione fi
Deflessione del cantilever: a fi
Riduzione della distanza tra le armature: d fi
Variazione della capacità DC
Fig ura 1
Corrado Di Natale, Sensors and Microsystems Group
I sensori e l’elettronica
I componenti elettronici hanno valori e parametri
dipendenti o dalle caratteristiche costruttive o dalle
caratteristiche del circuito stesso.
z Tramite i sensori il comportamento di un circuito
elettronico dipende dall’ambiente (o meglio da quelle
caratteristiche dell’ambiente a cui il sensore è sensibile).
z Queste caratteristiche rendono possibili una serie di
applicazioni dalla realizzazione di strumenti di misura
alla mimesi delle attività degli esseri viventi (robotica).
z Più il sistema diventa complesso più cresce il numero di
sensori, cioè le interfacce con l’ambiente esterno fi
sistema multisensoriale.
z Un sistema multisensoriale è un sistema in cui le
informazioni di più sensori concorrono a definere la
conoscenza di un ambiente.
z
y Sensor fusion
Corrado Di Natale, Sensors and Microsystems Group
2
I Microsensori
La tecnologia del silicio (microelettronica) rende possibile la realizzazione di
sistemi sensoriali in cui l’elemento sensibile sia integrato sullo stesso chip con
l’elettronica di controllo e misura.
z
Accelerometro
Sensore di pressione
Corrado Di Natale, Sensors and Microsystems Group
Paradigma Sensoriale “par excellance”:
il corpo umano
z
z
Il corpo umano acquisisce conoscenza dell’ambiente attraverso i
recettori sensoriali
Recettori sensoriali di tipo
y
y
z
z
z
z
FISICO: tatto, temperatura, ottica (visione), acustica (udito),…
CHIMICO: olfatto e gusto
I segnali dei recettori vengono elaborati (sensazioni) ed integrati
per formare la conoscenza (percezione) di un ambiente.
Il corpo umano possiede anche degli attuatori
Attuatori esterni: meccanici (muscoli) ed acustici (voce) che gli
consentono di interagire con l’ambiente.
Attuatori interni: biochimici (enzimi, ormoni,…) che gli
consentono di modificarsi in funzione dell’ambiente.
Corrado Di Natale, Sensors and Microsystems Group
3
Sensazione e Percezione
z
z
z
Sensazione: “Avverte i movimenti delle cose”
Percezione: “Riferisce le sensazioni alle cose stesse”
y
Cartesio: “Le passioni dell’anima” (1649)
y
Inciso : I movimenti Æ concetto differenziale (sensibilità)
La percezione come concetto multisensoriale:
y
“coscienza immediata di un tutto strutturato (totalità) le cui parti, considerate
singolarmente) non presentano le stesse qualità della totalità. La percezione ha proprietà
inscindibili dal tutto (non ne è la mera somma)” (Gestaltpsychologie)
Corrado Di Natale, Sensors and Microsystems Group
I parametri caratteristici dei sensori:
1. La curva di risposta
z
z
z
z
z
Formalmente un sensore descrive un mapping
dallo spazio del misurando allo spazio del segnale
d’uscita.
Se questi spazi hanno dimensione 1, il sensore è
rappresentabile attraverso una funzione V=f(M).
Questa funzione è detta risposta I/O o caratteristica
del sensore e rappresenta il parametro
fondamentale per caratterizzare un sensore.
La conoscenza della curva di risposta permette di
usare il sensore come strumento di misura: dalla
misura di V si evince una stima del misurando M
La curva di risposta si ottiene attraverso un
processo di calibrazione.
Misurando M
sensore
Segnale V
V
Regione
non-lineare
saturazione
Regione lineare
M
Corrado Di Natale, Sensors and Microsystems Group
4
I parametri caratteristici dei sensori:
2. Reversibilità
z
M
La reversibilità esprime la capacità del sensore di seguire, con una dinamica tipica
del sensore stesso, le variazioni del misurando. In particolare, un sensore è
reversibile se al cessare della sollecitazione del misurando la risposta del sensore
si annulla.
reversibile
M
Integrale
“dosimetro”
t
V
mono-uso
“disposable”
M
t
V
t
V
t
t
t
Corrado Di Natale, Sensors and Microsystems Group
I parametri caratteristici dei sensori:
3. Sensibilità
z
z
z
La sensibilità è definita come il rapporto tra la
variazione della risposta del sensore e la
variazione del misurando.
Definisce la capacità del sensore di seguire le
variazioni del misurando (cfr. definizione di
Cartesio della sensazione)
Matematicamente, si esprime come la derivata
della curva di risposta del sensore
S=
z
z
dV
dM
Nella regione di non linearità, S è funzione
del misurando.
Nella regione di linearità S è massima, perciò
sono massime le prestazioni del sensore
Corrado Di Natale, Sensors and Microsystems Group
V
M
Regione
lineare
Regione
non-lineare
saturazione
S
M
5
Sensibilità Globale
sensore
M
trasduttore
X
sensore
Vout
amplificatore
Va
filtro
A/D conv
N
Vf
condizionamento
z
Ognuno dei blocchi è caratterizzato da una sua funzione caratteristica che lega
l’uscita all’ingresso e quindi da una sensibilità.
( )
))
( (
( ( (
dN
d
S=
=
f
f ( f ( f ( M ))))
dM dM AD ( f A s
(
)
)))
N = f AD v f = f AD f f (v A ) = f AD f f f A (v out ) = f AD f f f A f s ( M )
z
Non solo il sensore risente della variazione del misurando M.
Corrado Di Natale, Sensors and Microsystems Group
Esempio: Sensibilità di un Sensore
resistivo di temperatura (Termistore)
RT (T ) = Ro (1+ aT );
I
V1 = RT (T ) ⋅ I
∆r(T)
V1
+
-
V1 = A ⋅ V 2
A
V2
∂V2 ∂V2 ∂Vi ∂R
=
⋅
⋅
= S i ⋅ ST ⋅ S A
∂T ∂V1 ∂R ∂T
S = A ⋅ I ⋅ a ⋅ Ro
S=
∆T fi ∆R fi ∆V1 fi ∆V2
S=
’S
j
j
Corrado Di Natale, Sensors and Microsystems Group
6
I parametri caratteristici dei sensori:
5. Risoluzione
z
z
z
z
z
La risoluzione è legata all’esistenza degli errori di misura e del rumore.
Per questo motivo, il segnale del sensore non è una grandezza deterministica ma ha
una componente aleatoria: V±dV. Dove dV esprime tutti gli errori di misura
dV è limitato inferiormente dal rumore elettronico del segnale V.
La risoluzione esprime come l’incertezza dV si traduce in una incertezza dM sulla
misura del misurando.
Vout Vnoise
Nella regione lineare:
resolution =
lim
=
S
Vout ÆVnoi se S
dM =
V±dV
tan a = S =
dV
S
z
z
dV
dM
M±dM
Corrado Di Natale, Sensors and Microsystems Group
M
z
La risoluzione dipende dalla sensibilità.
In sensori con sensibilità più alta gli errori di
misura influiscono di meno sulla stima del
misurando.
La definizione vale anche per sensori non
lineari, se nell’intervallo dV la curva è
assimilabile ad una retta.
Rumore elettronico
z
z
z
Il rumore è la manifesazione della natura statistica dei fenomeni che regolano il
passaggio di corrente.
Questo è dovuto principalmente alla natura discreta dei fenomeni elettrici.
Per definizione il rumore è:
y
y
y
y
A media nulla
Statisticamente definito
Distribuito in frequenza
A valore efficace diverso da 0.
Corrado Di Natale, Sensors and Microsystems Group
7
Densità Spettrale di Rumore
z
z
La potenza è proporzionale al quadrato della tensione (rms) o della corrente (rms).
La densità spettrale di potenza di rumore è definita come:
pn =
z
ÈW ˘
ÎÍ Hz ˚˙
Le densità spettrale di tensione e corrente sono definite come:
dEn2
df
en =
z
dPn
df
È V ˘
;
ÍÎ Hz ˙˚
in =
dI n2
df
È A ˘
ÍÎ Hz ˙˚
La tensione o la corrente di rumore, in una data banda di frequenza, si esprimono
come:
En [ f1 Æ f 2 ] =
f2
2
n
Ú e df [V ] ;
f1
I n[ f 1 Æ f 2] =
f2
Úi
2
n
df
f1
[ A];
Corrado Di Natale, Sensors and Microsystems Group
Distribuzioni spettrali di Rumore
Sv(f) [V2/Hz]
-20dB/dec
1/f
-40dB/dec
G-R
shot
termico
log f
termico :
S ( f ) = 4kTR
shot :
S ( f ) = 2aI o
G- R:
t
1+ w 2 t 2
Vb
S ( f ) = K a [b ª 2;a ª 1]
f
flic ker :
S( f ) = Ko
Rumore in eccesso
Corrado Di Natale, Sensors and Microsystems Group
8
Rumore Termico (Johnson Noise)
Potenza media di rumore Johnson generata per agitazione termica degli elettroni in un
resisitore e dissipata in un circuito contenente un resistore di uguale valore.
z
Pn = kTB
k = 1.38 ⋅ 10 -2 3
[W ]
J
K
In un circuito matched “R-R” la potenza dissipata in una delle due è data da:
z
2
Pn =
1 ÊÁ En ˆ
fi E n = 4kTRB
RË 2 ¯
[V ]
(
)
ª E n = 0.129 RB R[ MW ]
esempio :
R = 1KW ; B = 1KHz fi En = 0.129 mV
R = 100W ; B = 1KHz fi En = 41 nV
Il rumore Johnson si può anche esprimere con il generatore di corrente
z
In =
En
B
= 0.129
R [ MW ]
R
R
(
)
Corrado Di Natale, Sensors and Microsystems Group
Rumore shot
z
z
z
Termine che esprime la natura discreta della corrente che attraversa una giunzione
E’ un rumore in eccesso, quindi si manifesta solo quando una corrente viene
iniettata nel dispositivo.
Importante nei dispositivi a giunzione
I n = 2eIB = 5.66 ⋅ 10-10 IB
I n [ pA] = 0.566 IB con I [mA]
Corrado Di Natale, Sensors and Microsystems Group
9
Rumore Flicker
z
z
Rumore “universale” presente in tutti i fenomeni.
Aumenta “indefinitamente” al diminuire di f.
S=
cost
fa
con a ª 1
f2
En = K
Ú
f1
z
1
f
df = K log 2
f
f1
La quantità di rumore dipende solo dal rapporto f2/f1. Decadi diverse
forniscono lo stesso rumore:
y
y
En[10KHz-1KHz]= E n[0.01Hz-0.001KHz]
Se il rumore nella decade (0.1-1) Hz è pari ad 1 mV, il rumore nelle 9 decadi (10-91) Hz è
x
10 -9 Hz = 30 anni!
9 ⋅ 1mV = 3mV
Corrado Di Natale, Sensors and Microsystems Group
Esempio:
sensori chimici resistivi
Corrado Di Natale, Sensors and Microsystems Group
10
Esempio: Risoluzione di un Sensore
resistivo di temperatura (Termistore)
∂V2 ∂V2 ∂Vi ∂R
=
⋅
⋅
= S i ⋅ ST ⋅ S A
∂T ∂V1 ∂R ∂T
S = A ⋅ I ⋅ a ⋅ Ro
I
S=
∆r(T)
V1
+
-
A
V2 DTres =
DTres =
lim
DV 2 ÆV n oise
lim
DV 2 ÆV n oise
∆T fi ∆R fi ∆V1 fi ∆V2
DV2
DV 2
= lim
S t ot DV 2 ÆV noise A ⋅ I ⋅ a ⋅ Ro
D V2
Sj
’
j
Corrado Di Natale, Sensors and Microsystems Group
I parametri caratteristici dei sensori:
4. Selettività e cross-sensitivity (II)
Stato dell’ambiente
quanttità
ambiente
Sensibilità
Sensibilità
grandezze
Sensore
SPECIFICO
Sensore
NON SELETTIVO
grandezze
V @ Sj ⋅ M j
grandezze
V=
 Si ⋅ M i
i
Corrado Di Natale, Sensors and Microsystems Group
11
I parametri caratteristici dei sensori:
6. Limite di rivelazione
z
z
z
La risoluzione calcolata per un segnale uguale a 0, definisce il limit of detection
(LOD) del sensore.
La definizione traduce il fatto che non può esservi misura inferiore al suo errore.
Quando l’errore di misura raggiunge il suo limite inferiore, il rumore elettronico
Vn, si ha il limite di rivelazione teorico per quel sensore.
Si definisce un LODconvenzionale= (3 o 9)*LOD.
LOD =
dV
tan a = S =
dM
Vn
Vn
S
M
LOD
Corrado Di Natale, Sensors and Microsystems Group
I parametri caratteristici dei sensori:
7. Accuratezza e Riproducibilità
z
z
z
Accuratezza: capacità di un sistema di misura di fornire un valore del misurando
uguale al valor vero (ignoto)
Riproducibilità: capacità di un sensore di fornire lo stesso segnale a parità di
condizioni ambientali.
Sono grandezze statistiche: date N misure, il valor medio è relativo alla accuratezza
e la varianza alla riproducibilità.
• •• •• •
• •••••••
Yes Accuracy
Yes Reproduc.
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
Yes Accuracy
No Reproduc.
•
•
•
•
•
•
•
•
•
• •• •• •
• •• ••••
•
•
•
•
•
No Accuracy
No Reproduc.
No Accuracy
Yes Reproduc.
Figure 2: Pictorical representation of the definitions of accuracy and reproducibility
Corrado Di Natale, Sensors and Microsystems Group
12
I parametri caratteristici dei sensori:
8. Drift
Modifica temporale impredicibile delle caratteristiche del sensore.
In pratica, la curva di risposta si modifica col tempo per cui, nella stima del
misurando si introduce un errore che cambia (in genere cresce col tempo).
Il drift definisce il tempo di vita della calibrazione del sensore, cioè dopo quanto
tempo usare la stessa curva di risposta da luogo ad errori sul misurando non
tollerabili.
z
z
z
t0
t1
t2
V
M
Mm Mv Mv
Corrado Di Natale, Sensors and Microsystems Group
Esempio di un sensore reale
accelerometro ADXL50A
z
Curva di risposta
V ( a) = V0 + a⋅ K
z
Sensibilità
†
dV
S=
=K
da
z
V0 = 1.8V ; K = 0.019
V
g
a=
V - 1.8
g
0.019
†
mV
S = 19
g
Range dinamico
†y
Il range dinamico stabilisce il range di linearità entro il quale cioè la sensibilità
si mantiene costante, quindi le caratteristiche del sensore sono costanti. Tale
range è ± 50 g. S
Corrado Di Natale, Sensors and Microsystems Group
13
Esempio di un sensore reale
accelerometro ADXL50A
z
Rumore
La densità di rumore bianco del sensore è 125
y
Se ad esempio il segnale è filtrato da un filtro passa basso con frequenza di taglio 10 Hz,
il valore quadratico medio (rms) del
† rumore sarebbe
Vnoise ,
z
mV
y
rms
= 125
mV
Hz
Hz
⋅ 10Hz = 395 mV
Risoluzione
†
Resolution =
y
mV
Vn 125 Hz
mg
=
= 6.6
mV
S
19 g
Hz
1 mg =10 -3 g=0.0098 m/s 2
in una misura reale in cui il segnale è filtrato da un filtro passa basso con
frequenza
di taglio 10 Hz si otterrebbe una risoluzione pari a 20 mg.
†
Corrado Di Natale, Sensors and Microsystems Group
14