Il progetto nasce con l'esigenza di corrodere il rame nei CS in modo autonomo e
che non implichi la presenza ravvicinata dell'uomo a sostanze chimiche; inoltre
l'utente può dedicarsi ad altro senza stressarsi ad agitare la vaschetta.
Il prototipo consiste in una struttura che integra una vaschetta che viene
sollevata ed abbassata da un braccio meccanico, il tutto munito di sensori ottici
che rilevano la posizione del braccio meccanico ed un determinato circuito che
acquisisce l'informazione degli stessi sensori e pilota il motorino elettrico .
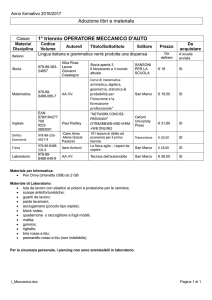
Il seguente sistema a blocchi indica in maniera comprensibile i vari stadi :
ALIMENTATORE
SENSORI
DRIVER
MOTOR DC
CONTATORE BINARIO
(CIRCUITO DIGITALE)
INTERFACCIA
SENSORI - CIRCUITO
DIGITALE
M1
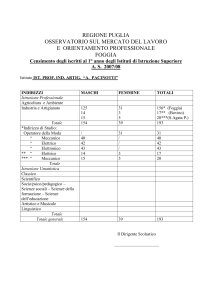
1) ALIMENTATORE
L'alimentatore deve mettere a disposizione una tensione livellata compresa tra
10-15volt ed una tensione stabilizzata di 5,6volt con una corrente di lavoro pari a
250mA. (Quando avviene l'inversione di marcia del motorino si ha una corrente
di picco pari a 600mA):
V1
-220/220V
T1
3TT201
D1
BA10G
7,7Vin
IC1
7805
IN
5 Vcc
OUT
50 Hz
COM
+
C1
470uF
+
D2
1N4148
C2
220uF
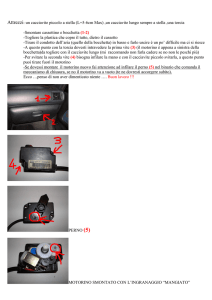
2) SENSORI + INTERFACCIA
Si tratta di particolari sensori-infrared monoblocco ovvero un unico dispositivo
che integra fotoled (trasmettitore) e fototransistor (ricevitore o detect) messi uno
di fronte all'altro.
Alimentando il fotoled esso emetterà un raggio infrarosso, se il fototransistor
riceve vuol dire che non vi sono ostacoli in mezzo e l'uscita, contrassegnata da un
cerchietto, vale 0; se il fototransistor NON riceve significa che nel mezzo del
monoblocco è presente un' ostacolo che ostruisce il passaggio della luce
infrarossa, e l'uscita vale 1.
+5VCC
+5VCC
R1
220
100
NOR
sensor1
R2
4.7k
3
U1A
LM358
+ 8
1
D3
1N4148
2
+5VCC
R5
100k
+5VCC
+5VCC
+13Vin
R9
390
R6
100k
CLOCK
+5VCC
2,5V
R4
100
220
sensor2
Q1
BC237
R3
4.7k
5
6
U1B
LM358
+
7
D4
1N4148
4
+5VCC
R7
100k
R8
100k
2,5V
Siccome i livelli logici forniti dai sensori sono compatibili solo con quelli C-MOS
ho dovuto progettare un'interfaccia costituita da 2 comparatori con soglia di
riferimento pari a Vcc/2 (gli operazionali sono alimentati con Vin poiché le
uscite valgono sempre un pò meno della tensione di alimentazione, ed
alimentarli con i 5Vcc sarebbe stato sconveniente).
Le due uscite degli operazionali confluiscono in una NOR artigianale realizzata
con due diodi (OR) ed un transistor configurato come stadio invertente (NOT).
Lo scopo è quello di dare in uscita un impulso ogni qual volta un sensore rileva il
braccio meccanico, informando così una circuiteria successiva che deve far
invertire marcia al braccio meccanico.
(il transistor invertente serve poiché dovrà pilotare l'ingresso di CK di un
Flip-Flop TTL in tecnologia NET [negative edge translation] le cui uscite
commutano solo sul fronte di discesa del segnale di CK). Attenzione, ora
potrebbe insorgere la critica dei meno esperti che direbbero "era meglio
configurare gli operazionali come comparatori invertenti fin dall'inizio ed invertire i
diodi risparmiando sul transistor (lasciando però la resistenza di pull'up)"
- assolutamente NO perché gli operazionali in questione, sono stati scelti perché
risultano economici ed occupano il pochissimo spazio di un DIL a 8pin, ma
hanno un determinato off-set che varia da dispositivo a dispositivo ed è
inaccettabile per il FF-JK in tecnologia TTL di cui ora parleremo.
3) Contatore binario modulo 2
Si tratta di un circuito digitale in grado di contare gli impulsi di CK ricevuti,
poiché può ricordare lo stato logico precedente. Ho sfruttato così uno dei due
FF-JK contenuti nell'integrato SN7476 e lo ho configurato come FF-Toggle: in
questo modo il dispositivo commuterà i livelli logici delle uscite complementari
( Q - Q ) solo dopo che avrà ricevuto un periodo completo di clock (più
precisamente commuterà esattamente sul fronte di discesa del ck, ovvero in quel
breve periodo in cui il segnale di clock passerà da 1logico a 0logico).
2
5
PR
16
CLOCK
Q
J
1
4
Vcc
15
SN7476
Q
K
14
CL
3
GND
13
Le uscite complementari (una la negazione dell'altra) controlleranno il driver
che piloterà il motorino in corrente continua. Quando Q=1 allora Qnegato=0 ed
il motorino del braccio meccanico girerà in un verso. Invece quando Q=0 allora
Qnegato=1 ed il motorino del braccio meccanico girerà nel verso contrario.
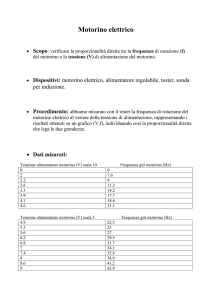
4) Driver
per driver ho utilizzato l'integrato DNE293 equivalente all'LM18293 cui
contiene al suo interno 4 stadi push-pull che ho collegati in parallelo a due a due,
e li ho configurati a BRIDGE (ponte). Quando un push-pull riceve in ingresso
zero logico in uscita darà massa altrimenti darà il positivo, naturalmente tale
driver supporta tranquillamente la corrente richiesta dal motorino fino ad un
limite di 2A.
7,7Vin
Q
7
1
Qneg
9
8
16
2
15
10
DNE293
6
3
14
4
5
12
11
13
+5Vcc
D1
1N4007
D2
1N4007
M1
D3
1N4007
D4
1N4007
Braccio meccanico
Vasca x acido
Circuito di controllo
tale prospettiva è molto semplice e priva di particolari: da comunque, in linea di
massima, l'idea del progetto finale che si vuole realizzare.