Altivar 31
Guida alla programmazione
Variatori di velocità
per motori asincroni
Sommario
Avvertimenti _________________________________________________________________________________________________ 2
Le fasi dell’installazione e della messa in servizio ____________________________________________________________________ 3
Configurazione di base _________________________________________________________________________________________ 4
Funzioni de base _____________________________________________________________________________________________ 5
Messa in servizio - Consigli preliminari_____________________________________________________________________________ 7
Funzioni del display e dei tasti ___________________________________________________________________________________ 8
Opzione terminale remotato ____________________________________________________________________________________ 10
Programmazione ____________________________________________________________________________________________ 11
Compatibilità delle funzioni _____________________________________________________________________________________ 13
Lista delle funzioni degli ingressi / uscite __________________________________________________________________________ 14
Menu regolazioni SEt- ________________________________________________________________________________________ 16
Menu controllo motore drC- ____________________________________________________________________________________ 20
Menu Ingressi /uscite I-O-______________________________________________________________________________________ 23
Menu Comando CtL- _________________________________________________________________________________________ 26
Menu Funzioni applicazioni FUn- ________________________________________________________________________________ 37
Menu Difetti FLt- _____________________________________________________________________________________________ 60
Menu Comunicazione COM- ___________________________________________________________________________________ 63
Menu Visualizzazione SUP- ____________________________________________________________________________________ 64
Manutenzione _______________________________________________________________________________________________ 67
Difetti - cause - procedure di intervento ___________________________________________________________________________ 68
Tabella di memorizzazione configurazione/regolazioni _______________________________________________________________ 70
Indice dei codici dei parametri __________________________________________________________________________________ 74
Indice delle funzioni __________________________________________________________________________________________ 75
NOTA : Consultare anche la "Guida all’installazione".
1
Avvertimenti
Quando il variatore è sotto tensione, gli elementi di potenza, così come un certo
numero di dispositivi di controllo, sono collegati alla rete di alimentazione.
Per questo motivo è molto pericoloso toccarli. Il coperchio di protezione del
variatore deve restare chiuso.
In generale qualsiasi intervento, sia sulla parte elettrica che su quella meccanica
dell’impianto o della macchina, deve essere preceduto dall’interruzione
dell’alimentazione del variatore.
Dopo aver scollegato l’alimentazione dell'ALTIVAR ed atteso lo spegnimento
completo del display, attendere 10 minuti prima di intervenire sull’apparecchio.
Questa attesa corrisponde al tempo necessario alla scarica dei condensatori.
Il motore può essere fermato anche con variatore in funzione mediante
annullamento dei comandi di marcia o del riferimento di velocità, sempre con il
variatore alimentato. Se la sicurezza del personale impone di impedire eventuali
riavviamenti intempestivi, il blocco elettronico è insufficiente: Prevedere un
dispositivo di interruzione sul circuito di potenza.
Il variatore integra dei dispositivi di sicurezza che possono, in caso di guasto,
comandare l'arresto del variatore e di conseguenza l'arresto del motore. Il motore
può a sua volta subire un arresto per blocco meccanico. Gli arresti possono
inoltre essere dovuti a variazioni di tensione e in modo particolare a interruzioni
dell’alimentazione.
La scomparsa delle cause di arresto rischia di provocare un riavviamento che
potrebbe costituire un pericolo per alcune macchine o impianti, in particolare per
quelle che devono essere conformi alle normative in materia di sicurezza.
In questo caso è quindi importante che l’operatore si tuteli contro l’eventualità di
un riavviamento utilizzando ad esempio un rilevatore di bassa velocità che, in
caso di arresto non programmato del motore, comandi l’interruzione
dell'alimentazione del variatore.
L'installazione e la messa in servizio del variatore devono essere effettuate in
conformità con quanto previsto dalle norme internazionali IEC e nazionali del
Paese di utilizzo. La messa in conformità spetta all'installatore che per quanto concerne la Comunità Europea deve rispettare, tra le altre normative, la direttiva EMC.
Il rispetto dei requisiti essenziali della direttiva EMC è condizionato naturalmente
dall’applicazione di quanto previsto dal documento.
L'Altivar 31 deve essere considerato un componente poichè in base alle direttive
europee (direttiva macchine e direttiva compatibilità elettromagnetica) non si
tratta né di una macchina né di un apparecchio pronto all'impiego. Spetta
all’utilizzatore finale garantire la conformità della sua macchina a tali norme.
Il variatore non deve essere utilizzato come dispositivo di sicurezza per le
macchine che presentano un rischio per beni o persone (apparecchiature di
sollevamento ad esempio).
I controlli di sovravelocità o di non controllo traiettoria devono essere in questo
caso garantiti da dispositivi di sicurezza distinti e indipendenti dal variatore.
I prodotti e i materiali presentati in questo manuale sono in qualsiasi momento
suscettibili di evoluzione o modifiche sia sul piano estetico che tecnico e d’impiego.
La loro descrizione non può in alcun caso rivestire un aspetto contrattuale.
2
Le fasi dell’installazione e della messa in servizio
1 - Ricevimento del variatore
• Accertarsi che il riferimento del variatore riportato sull’etichetta sia conforme a quanto indicato sulla bolla di consegna e sull’ordine.
• Aprire l’imballo e verificare che l’Altivar 31 non sia stato danneggiato durante il trasporto.
2 - Verificare che la tensione di rete sia compatibile con la gamma di alimentazione del variatore
(vedere Guida all’installazione ATV 31)
- Il mancato rispetto della tensione di rete può provocare danni irreversibili al variatore
3 - Fissare il variatore
4 - Collegare al variatore:
• la rete di alimentazione, accertandosi che:
- sia compatibile con la gamma di tensione del variatore
- sia fuori tensione
• il motore, assicurandosi che gli avvolgimenti motore siano collegati secondo la tensione della rete di alimentazione
• il comando tramite gli ingressi logici
• la regolazione della velocità tramite gli ingressi logici o analogici
5 - Alimentare il variatore senza dare l’ordine di marcia
6 - Configurare:
La frequenza nominale (bFr) del motore, se diversa da 50 Hz.
7 - Configurare nel menu drC-:
I parametri motore, solo nel caso in cui la configurazione di base del variatore non sia adatta all’applicazione.
8 - Configurare nei menu I-O-, CtL- e FUn-:
Le funzioni applicazione solo nel caso in cui la configurazione di base del variatore non sia adatta all’applicazione, ad esempio il modo di
controllo: 3 fili, o 2 fili su transizione, o 2 fili su livello, o 2 fili su livello con priorità marcia avanti, o comando locale per ATV31ppppppA.
Si consiglia di accertarsi che le funzioni programmate siano compatibili con lo schema di cablaggio utilizzato.
9 - Regolare nel menu SEt-:
- i parametri ACC (Accelerazione) e dEC (Decelerazione),
- i parametri LSP (Velocità minima quando il valore del riferimento è zero) e HSP (Velocità massima quando il valore del riferimento è
al massimo),
- il parametro ItH (Protezione termica motore),
10 - Avviare
Consigli pratici
• La programmazione del variatore può essere preparata inserendo i dati nelle tabelle di memorizzazione configurazione e regolazioni
(vedere pag. 70), soprattutto quando è necessario modificare la configurazione di base
• Un ripristino delle preregolazioni di base è sempre possibile con il parametro FCS nei menu drC-, I-O-, CtL- e FUn- (impostare InI
per attivare la funzione, vedere pag. 22, 25, 36 o 59).
• L’autotuning, effettuabile con il menu drC-, permette di ottenere prestazioni ottimali in precisione e tempi di risposta.
L’autotuning misura la resistenza statorica del motore per ottimizzare gli algoritmi di comando.
3
Configurazione di base
Preregolazioni
L'Altivar 31 è preregolato di base per le condizioni d'impiego più comuni e frequenti:
• Visualizzazione: variatore pronto (rdY) a motore fermo e frequenza motore con motore in funzione.
• Frequenza motore (bFr): 50 Hz.
• Applicazione a coppia costante, controllo vettoriale del flusso senza rilevatore (UFt = n).
• Modo di arresto normale su rampa di decelerazione (Stt = rMP).
• Modo di arresto su difetto: ruota libera
• Rampe lineari (ACC, dEC): 3 secondi.
• Piccola velocità (LSP): 0 Hz.
• Grande velocità (HSP): 50 Hz.
• Guadagni anello frequenza: standard (FLG, StA).
• Corrente termica motore (ItH) = corrente nominale motore (valore in base al calibro del variatore).
• Corrente di frenatura con iniezione all’arresto (SdC1) = 0,7 x corrente nominale variatore, per 0,5 secondi.
• Adattamento automatico della rampa di decelerazione in caso di sovratensione alla frenatura.
• Nessun riavviamento automatico in seguito ad un difetto.
• Frequenza di commutazione 4 kHz.
• Ingressi logici:
- LI1, LI2 (2 sensi di marcia): comando 2 fili su transizione, LI1 = marcia avanti, LI2 = marcia indietro, non attivi sui variatori
ATV 31ppppppA (non configurati).
- LI3, LI4: 4 velocità preselezionate (velocità 1 = riferimento velocità o LSP, velocità 2 = 10 Hz, velocità 3 = 15 Hz,
velocità 4 = 20 Hz).
- LI5 - LI6: non attivi (non configurati).
• Ingressi analogici:
- AI1: riferimento velocità 0-10 V, non attivo sugli ATV 31ppppppA (non configurato).
- AI2: riferimento sommatore velocità 0±10 V.
- AI3: 4-20 mA non attivo (non configurato).
• Relè R1: il contatto si apre in caso di difetto (o di variatore fuori tensione)
• Relè R2: non attivo (non configurato).
• Uscita analogica AOC: 0-20 mA, non attiva (non configurata).
Gamma ATV 31ppppppA
I variatori ATV 31ppppppA preregolati in fabbrica sono forniti con comando locale attivato: i pulsanti RUN, STOP e il potenziometro del
variatore sono attivi. Gli ingressi logici LI1 e LI2 così come l’ingresso analogico AI1 non sono attivi (non configurati).
Se i valori sopra riportati sono compatibili con l'applicazione, il variatore è pronto per essere utilizzato senza dover procedere alla modifica
delle regolazioni.
4
Funzioni de base
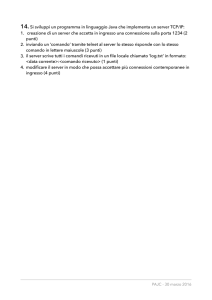
Protezione termica del variatore
Funzioni:
Protezione termica mediante sonda termica PTC fissata sul radiatore o integrata nel modulo di potenza.
Protezione indiretta del variatore contro i sovraccarichi mediante sgancio in caso di sovracorrente. Punti di intervento tipici:
- corrente motore = 185 % della corrente nominale variatore: 2 secondi
- corrente motore = 150 % della corrente nominale variatore: 60 secondi
Tempo
(secondi)
5000
3000
1000
200
160
100
60
2
0
1
1,1
1,2
1,3
1,4
1,5
1,6
1,7
1,8
1,9
Corrente motore / In variatore
Ventilazione dei variatori
Il ventilatore viene alimentato alla messa sotto tensione del variatore, quindi fermato dopo 10 secondi se non sopravviene alcun ordine di
marcia.
Il ventilatore viene alimentato automaticamente allo sblocco del variatore (senso di marcia + riferimento). Viene messo fuori tensione alcuni
secondi dopo il blocco del variatore (velocità motore < 0,2 Hz e frenatura mediante iniezione di cc terminata).
5
Funzioni di base
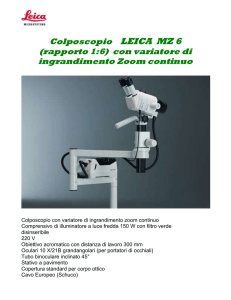
Protezione termica del motore
Funzione:
Protezione termica mediante calcolo della I2t.
La protezione tiene conto dei motori autoventilati
Attenzione, la memoria dello stato termico del motore viene azzerata alla messa fuori tensione del variatore.
Tempo di intervento t
in secondi
10 000
1 Hz 3 Hz 5 Hz
10 Hz
20 Hz
50 Hz
1 000
100
0,7
0,8
0,9
1
1,1
1,2
1,3
1,4
1,5
1,6
Corrente motore / ItH
6
Messa in servizio - Consigli preliminari
Prima di alimentare e configurare il variatore
- Verificare che la tensione di rete sia compatibile con la gamma della tensione di alimentazione del variatore (vedere
pagine 3 e 4 della Guida all’installazione dei variatori ATV 31). Il mancato rispetto della tensione di rete può provocare
danni irreversibili al variatore.
- Scollegare gli ingressi logici (stato 0) per evitare eventuali riavviamenti intempestivi.
Di default, all’uscita dai menu di configurazione, l’assegnazione di un ingresso ad un ordine di marcia provoca
l’avviamento immediato del motore.
Comando variatore mediante contattore di linea
- Evitare di comandare frequentemente il contattore (usura precoce dei condensatori di filtraggio); utilizzare gli ingressi
da LI1 a LI6 per comandare il variatore.
- In caso di cicli < 60 s, queste disposizioni sono tassative, altrimenti può esserci il rischio di distruzione della
resistenza di carica.
Regolazione utente e estensioni delle funzioni
Se necessario il display e i pulsanti consentono la modifica delle regolazioni e l’estensione delle funzioni illustrate in dettaglio nelle pagine
seguenti. Il ripristino della preregolazione di base è facilmente effettuabile attraverso il parametro FCS dei menu drC, I-O, CtL e FUn
(impostare a InI per attivare la funzione, vedere pag. 22, 25, 36 o 59).
I parametri sono di tre tipi:
- parametri di visualizzazione: valori visualizzati dal variatore
- parametri di regolazione: modificabili a motore fermo o in funzione
- parametri di configurazione: modificabili solo a motore fermo e non in frenatura. Visualizzabili in funzionamento.
- Accertarsi che le modifiche delle regolazioni effettuate in funzionamento non presentino pericoli; si consiglia
comunque di effettuarle preferibilmente a motore fermo.
Avviamento
Importante: nella preregolazione di base, in caso di messa in tensione o reset manuale dei difetti o ancora in seguito ad un comando di
arresto, il motore può essere alimentato solo in seguito al reset dei comandi "avanti", "indietro", "arresto mediante iniezione di cc". Di default
il variatore visualizza "nst" ma non parte.
Se è configurata la funzione riavviamento automatico (parametro Atr del menu FLt vedere pag. 60), questi comandi vengono acquisiti
senza bisogno di reset preventivo.
Prova su motore di debole potenza o senza motore
• Nella preregolazione di base la funzione di rilevamento "perdita di fase motore" è attiva (OPL = YES). Per verificare il variatore in
condizioni di test o di manutenzione e senza ricorrere ad un motore di potenza equivalente al calibro del variatore (in particolare per i
variatori di forte potenza), disattivare la funzione di rilevamento "perdita di fase motore" (OPL = no).
• Configurare la legge tensione / frequenza UFt = L (menu drC- pagina 21)
• La funzione di protezione termica del motore non è garantita dal variatore se le corrente motore è inferiore a 0,2 volte la corrente
nominale variatore.
Utilizzo di motori in parallelo
• Configurare la legge tensione / frequenza: UFt = L (menu drC- pagina 21)
• La protezione termica dei motori non è più garantita dal variatore. Utilizzare un altro dispositivo di protezione termica su ciascun
motore.
7
Funzioni del display e dei tasti
Altivar 31
• Spia rossa
"bus DC sotto tensione"
RUN
CAN
• 4 display "7 segmenti"
• 2 spie di stato CANopen
ERR
• Consente di passare
al menu o al parametro
precedente, o di aumentare
il valore visualizzato
ESC
ENT
• Consente di passare
al menu o al parametro
successivo, o di diminuire
il valore visualizzato
• Premendo i tasti
o
• Consente di entrare in un menu
o in un parametro, o di salvare
il parametro o il valore
visualizzato
la scelta non viene memorizzata.
• Tenendo premuti (>2 s) i tasti
o
si ottiene uno scorrimento rapido dei valori.
Memorizzazione, registrazione della scelta visualizzata: ENT
La memorizzazione è segnalata dal lampeggiamento del valore visualizzato
Visualizzazione normale con variatore non in difetto o in fase di messa in servizio:
- 43.0: Visualizzazione del parametro selezionato nel menu SUP (di default: frequenza motore).
In caso di limitazione di corrente, il valore visualizzato lampeggia.
- init: Sequenza d’inizializzazione
- rdY: Variatore pronto.
- dcb: Frenatura con iniezione di corrente continua in corso.
- nSt: Arresto a ruota libera.
- FSt: Arresto rapido
- tUn: Autotuning in corso.
In caso di difetto questo viene visualizzato tramite lampeggiamento.
8
• Consente di uscire da un menu o
da un parametro, o di lasciare il
valore visualizzato per tornare al
valore precedente in memoria
Funzioni del display e dei tasti
ATV31ppppppA:
• Spia rossa
"bus DC sotto tensione"
Altivar 31
RUN
• 4 display "7 segmenti"
CAN
ERR
• Consente di passare al menu
o al parametro precedente, o di
aumentare il valore visualizzato
ESC
• Consente di passare al menu
o al parametro successivo, o di
diminuire il valore visualizzato
ENT
RUN
• Potenziometro di regolazione,
attivo se il parametro Fr1 del menu
CtL resta configurato su AIP
STOP
RESET
• Pulsante RUN: comanda la messa
in tensione del motore in marcia
avanti, se il parametro tCC del menu
I-O resta configurato su LOC
• Premendo i tasti
o
• 2 spie di stato CANopen
• Consente di uscire da un menu o da un
parametro, o di lasciare il valore
visualizzato per tornare al valore
precedente in memoria
• Consente di entrare in un menu o in un
parametro, o di salvare il parametro o
il valore visualizzato
Pulsante STOP/RESET
• permette il riarmo dei difetti
• può sempre comandare l’arresto
del motore.
- Se tCC (menu I-O) non è
configurato in LOC, l’arresto
avviene a ruota libera.
- Se tCC (menu I-O) resta configurato
in LOC, l’arresto avviene su rampa,
ma se la frenatura con iniezione
di cc è già in corso, l’arresto avviene
a ruota libera.
la scelta non viene memorizzata.
• Tenendo premuti (>2 s) i tasti
o
si ottiene uno scorrimento rapido dei valori.
Memorizzazione, registrazione della scelta effettuata: ENT
La memorizzazione è segnalata dal lampeggiamento del valore visualizzato
Visualizzazione normale con variatore non in difetto o in fase di messa in servizio:
- 43.0: Visualizzazione del parametro selezionato nel menu SUP (di default: frequenza di uscita applicata al motore).
In caso di limitazione di corrente, il valore visualizzato lampeggia.
- init: Sequenza d’inizializzazione
- rdY: Variatore pronto.
- dcb: Frenatura con iniezione di corrente continua in corso.
- nSt: Arresto a ruota libera.
- FSt: Arresto rapido
- tUn: Autotuning in corso.
In caso di difetto questo viene visualizzato tramite lampeggiamento.
9
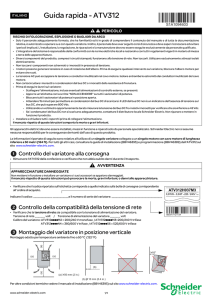
Opzione terminale remotato
Il terminale è un dispositivo di comando locale che può essere montato sulla porta della cassetta o dell’armadio. Comprende un cavo con
prese integrate, da collegare sul collegamento seriale del variatore (vedere le istruzioni fornite con il terminale). Il display di visualizzazione
e i tasti di programmazione sono gli stessi dell’Altivar 31 con in più un commutatore di blocco accesso ai menu e tre pulsanti per il comando
del variatore:
• FWD/REV: inversione del senso di rotazione
• RUN: ordine di marcia del motore
• STOP/RESET: oridne di arresto del motore o riarmo difetti
Il primo impulso sul pulsante comanda l’arresto del motore e, se è configurata la frenatura mediante iniezione di corrente continua,
all’arresto un secondo impulso interrompe la frenatura.
Vista frontale:
Vista posteriore:
Display
4 caratteri
ESC
Connettore
ENT
FWD
REV
RUN
STOP
RESET
Commutatore di blocco accesso:
• posizioni:
regolazioni e visualizzazione
accessibili
(menu SEt- e SUP)
• posizione:
tutti i menu accessibili
Nota: La protezione con codice di accesso confidenziale cliente ha priorità sul commutatore.
• Il commutatore di blocco accesso del terminale remotato consente di bloccare anche l’accesso con i tasti del variatore.
• Quando il terminale remotato è scollegato l’eventuale blocco resta attivo per i tasti del variatore.
• Perchè il terminale remotato sia attivo il parametro tbr del menu COM- deve restare alla preregolazione di base: 19.2 (vedere
pag. 73).
Salvataggio e caricamento delle configurazioni
Il terminale remotato permette di memorizzare fino a 4 configurazioni complete di variatori ATV31, offrendo in tal modo la possibilità di
salvare, trasportare e trasferire le configurazioni da un variatore ad altri variatori dello stesso calibro. Permette inoltre di mantenere 4
configurazioni diverse per uno stesso apparecchio. Vedere i parametri SCS e FCS dei menu drC-, I-O-, CtL-, e FUn.
10
Programmazione
Accesso ai menu
Messa sotto tensione
Visualizza lo stato del variatore
XXX
ESC
ENT
bFr
Frequenza motore (preregolazione visibile
solo alla prima messa sotto tensione)
ENT
ESC
ESC
ESC
ESC
Menu
ESC
ESC
ESC
ESC
SEt-
ENT
ENT
drCI-O-
ESC
SUP-
Ingressi / uscite
ESC
ENT
ESC
Comando
ENT
Funzioni
ESC
ENT
FLtCON-
Controllo motore
ENT
CtLFUn-
Regolazioni
ESC
ESC
Difetti
ENT
Comunicazione
ESC
ENT
ESC
Visualizzazione
Alcuni parametri sono accessibili da più menu per garantire maggior confort d’impiego:
- le regolazioni,
- il ritorno alla preregolazione di base,
- il richiamo e il salvataggio della configurazione.
I codici dei menu e sotto-menu sono divisi dai codici dei parametri con un trattino a destra.
Esempi: menu FUn-, parametro ACC.
11
Programmazione
Accesso ai parametri dei menu
Memorizzazione, registrazione della scelta effettuata : tasto
ENT
La memorizzazione viene segnalata dal lampeggio del valore visualizzato
Esempio:
Valore o configurazione
Parametro
Menu
SEt-
ENT
ACC
ESC
ENT
15 0
.
ESC
ESC
dEC
26 0
1 lampeggio
(registrazione)
.
26 0
.
ENT
(Parametro successivo)
Tutti i menu sono "a tendina"; se giunti all’ultimo parametro si tiene premuto il tasto
si passa dal primo all’ultimo parametro tenendo premuto il tasto
.
ENT
Menu
è possibile accedere al primo parametro e viceversa
1o
ESC
nmo
ultimo
Se si esce da un menu dopo aver modificato un parametro qualsiasi (nmo) e si torna quindi a questo menu senza essere entrati nel frattempo
in un altro menu, si entra automaticamente sul parametro nmo come qui di seguito illustrato. Se nel frattempo si è entrati in un altro menu
o in caso di una messa fuori tensione con successiva messa sotto tensione si accede sempre al primo parametro del menu come sopra
indicato.
1o
ENT
Menu
nmo
ESC
ultimo
Configurazione del parametro bFr
Questo parametro può essere modificato solo a motore fermo senza ordine di marcia.
>.H
Codice
bFr
12
Descrizione
Gamma di
regolazione
Preregolazione
di base
50
Frequenza standard motore
Questo parametro è visibile solo alla prima messa sotto tensione.
Resta sempre possibile modificarlo nel menu drC-.
50 Hz: IEC
60 Hz: NEMA
Questo parametro modifica le preregolazioni dei parametri: HSP pagina 16, Ftd pagina 19, FrS pagina 20 e tFr pagina
22.
Compatibilità delle funzioni
Funzioni incompatibili
Le seguenti funzioni non saranno accessibili o saranno disattivate nei casi qui di seguito riportati:
Riavviamento automatico
Possibile solo per il tipo di comando 2 fili su livello (tCC = 2C e tCt = LEL o PFO).
Ripresa al volo
Possibile solo per il tipo di comando 2 fili su livello (tCC = 2C e tCt = LEL o PFO).
Questa funzione è bloccata se l’iniezione automatica a motore fermo è configurata in continuo (AdC = Ct).
Marcia indietro
Solo sui variatori ATV31ppppppA questa funzione è bloccata se è attivo il comando locale (tCC = LOC)
Tabella di compatibilità delle funzioni
A
p
p
Gestione finecorsa
Velocità preselezionate
Regolatore PI
Marcia passo-passo JOG
X
p
X
p
p
p
Comando freno
p
p
X
p
p
p
p
p
p
A
p
A
p
p
p
p
p
p
Arresto con iniezione di corrente
Arresto ruota libera
Arresto rapido
Arresto con iniezione di corrente
Comando freno
Marcia passo-passo JOG
Regolatore PI
Velocità preselezionate
Gestione finecorsa
p
Ingressi sommatori
Più veloce / meno veloce (1)
Più veloce / meno veloce (1)
Ingressi sommatori
La scelta delle funzioni applicazione può essere limitata dal numero degli ingressi / uscite e dall’incompatibilità di alcune funzioni tra loro.
Le funzioni non riportate nella tabella non sono oggetto di incompatibilità.
Quando vi è incompatibilità tra funzioni, la prima funzione configurata impedisce la configurazione delle altre.
A
A
Arresto rapido
X
Arresto ruota libera
X
(1) Tranne impiego specifico con canale di regolazione Fr2 (vedere sinottici 28 e 30)
p Funzioni incompatibili
Funzioni compatibili
Senza oggetto
Funzioni prioritarie (funzioni che non possono essere attive contemporaneamente):
X A La funzione indicata dalla freccia è prioritaria sull’altra.
Le funzioni di arresto hanno priorità sugli ordini di marcia.
I riferimenti di velocità mediante ordine logico hanno priorità sui riferimenti analogici.
Funzioni di applicazione degli ingressi logici e analogici
Ciascuna delle funzioni delle pagine seguenti può essere assegnata ad uno degli ingressi.
Lo stesso ingresso può azionare più funzioni contemporaneamente (marcia indietro e 2a rampa ad esempio); occorre quindi accertarsi
che le funzioni siano compatibili tra loro.
Il menu di visualizzazione SUP- (parametri LIA e AIA pagina 66) permette di visualizzare le funzioni assegnate ad ogni ingresso allo scopo
di verificarne la compatibilità.
13
Lista delle funzioni degli ingressi / uscite
Ingressi logici
Pagina
Codice
Non configurata
-
-
44
44
44
45
51
51
48
48
46
38
55
39
39
40
23
61
60
63
34
35
56
58
58
62
PS2
PS4
PS8
PS16
Pr2
Pr4
USP
dSP
JOG
rPS
LC2
FSt
dCI
nSt
rrS
EtF
rSF
FLO
rFC
CCS
CHP
LAF
LAr
InH
Pagina
Codice
Non configurata
Valore 1
33
Fr1
Valore 2
Sommatore ingresso 2
Sommatore ingresso 3
Ritorno regolatore PI
33
42
42
51
Fr2
SA2
SA3
PIF
Pagina
24
24
24
24
24
24
24
24
24
24
24
54
Codice
OCr
rFr
OLO
OPr
FLt
rUn
FtA
FLA
CtA
SrA
tSA
BLC
Marcia avanti
2 velocità preselezionate
4 velocità preselezionate
8 velocità preselezionate
16 velocità preselezionate
2 riferimenti PI preselezionate
4 riferimenti PI preselezionate
Più veloce
Meno veloce
Marcia passo-passo
Commutazione di rampa
Commutazione 2a limitazione di corrente
Arresto rapido mediante ingresso logico
Iniezione di corrente continua mediante ingresso logico
Arresto ruota libera mediante ingresso logico
Marcia indietro
Difetto esterno
Reset (riarmo dei difetti)
Forzatura locale
Commutazione riferimento
Commutazione canale di comando
Commutazione motore
Limitazione marcia avanti (finecorsa)
Limitazione marcia indietro (finecorsa)
Inibizione dei difetti
Ingressi analogici
Uscita analogica / logica
Non configurata
Corrente motore
Frequenza motore
Coppia motore
Potenza emessa dal variatore
Variatore in difetto (informazione logica)
Variatore in funzione (informazione logica)
Soglia di frequenza raggiunta (informazione logica)
Velocità massima HSP raggiunta (informazione logica)
Soglia di corrente raggiunta (informazione logica)
Valore di frequenza raggiunto (informazione logica)
Soglia termica motore raggiunta (informazione logica)
Logica freno (informazione logica)
14
Preregolazione di base
ATV31pppppp ATV31ppppppA
LI5 - LI6
LI1 - LI2
LI5 - LI6
LI1
LI3
LI3
LI4
LI4
LI2
Preregolazione di base
ATV31pppppp ATV31ppppppA
AI3
AI1 - AI3
AI1
AIP
(potenziometro)
AI2
AI2
Preregolazione di base
AOC/AOV
Lista delle funzioni degli ingressi / uscite
Relè
Non configurato
Variatore in difetto
Variatore in funzione
Soglia di frequenza raggiunta
Velocità massima HSP raggiunta
Soglia di corrente raggiunta
Valore di frequenza raggiunto
Soglia termica motore raggiunta
Logica freno
Pagina
24
24
24
24
24
24
24
54
Codice
FLt
rUn
FtA
FLA
CtA
SrA
tSA
BLC
Preregolazione di base
R2
R1
15
Menu regolazioni SEt-
SEt-
ENT
LFr
ESC
ESC
ESC
ENT
Riferimento velocità impostato da terminale
ESC
rPI
ACC
ENT
ESC
ENT
ESC
ESC
SdS
ENT
Fattore di scala del parametro Spd
ESC
I parametri di regolazione possono essere modificati sia in marcia che a motore fermo.
Accertarsi che le modifiche effettuate con motore in funzione non presentino alcun pericolo; si consiglia di effettuarle
preferibilmente a motore fermo.
Parametri visualizzati qualunque siano le configurazioni degli altri menu.
.
Parametri visualizzati solo se la funzione corrispondente è stata selezionata in un altro menu. Questi parametri sono
accessibili e regolabili anche nel menu di configurazione della funzione corrispondente, per una maggiore semplicità di
programmazione. La loro descrizione è dettagliata nei rispettivi menu, nelle pagine indicate.
SEtCodice
LFr
rPI
ACC
Descrizione
Gamma di
Preregolazione
regolazione
di base
Valore velocità impostato da terminale remotato.
da 0 a HSP
Parametro visualizzato se LCC = YES pagina 35 o se Fr1 / Fr2 = LCC pagina 33, e se il terminale remotato
è collegato. In questo caso LFr è accessibile anche dalla tastiera del variatore.
LFr è reinizializzato a 0 alla messa fuori tensione.
Valore interno del regolatore PI
Vedere pag. 51 da 0,da 0 a 100 % 0
Tempi della rampa d’accelerazione
da 0,1 a 999,9 s
3s
Definiti per accelerare da 0 alla frequenza nominale FrS (parametro drC-).
dEC
Tempi della rampa di decelerazione
da 0,1 a 999,9 s
3s
Definiti per decelerare dalla frequenza nominale FrS (parametro drC-) a 0 Assicurarsi che il valore dEC
non sia troppo basso in relazione al carico da fermare.
tA1
Arrotondamento inizio rampa accelerazione tipo
da 0 a 100
10%
CUS in % del tempo totale di rampa (ACC o AC2)
Arrotondamento inizio rampa accelerazione tipo
da 0 a (100-tA1) 10%
CUS in % del tempo tot. di rampa (ACC o AC2)
Arrotondamento fine rampa decelerazione tipo
da 0 a 100
10%
CUS in % del tempo totale di rampa (dEC o dE2)
Arrotondamento fine rampa decelerazione tipo
da 0 a (100-tA3) 10%
CUS in % del tempo totale di rampa (dEC o dE2)
2o tempo della rampa di accelerazione
Vedere pag. 38 da 0,1 a 999,9 s
5s
2o tempo della rampa di decelerazione
Vedere pag. 38 da 0,1 a 999,9 s
5s
Velocità minima
da 0 a HSP
0 Hz
(Frequenza motore minima).
Velocità massima
da LSP a tFr
bFr
(frequenza motore massima): accertarsi che il valore regolato sia adatto al motore e all’applicazione.
Protezione termica del motore - corrente termica max
da 0,2 a 1,5 In (1) In base al calibro
del variatore
Regolare ItH all’intensità nominale indicata sulla targhetta motore.
Per disattivare la protezione termica, vedere OLL pagina 61.
tA2
tA3
tA4
AC2
dE2
LSP
HSP
ItH
(1) In corrisponde alla corrente nominale variatore indicata nella guida all’installazione e sulla targhetta del variatore.
16
Menu regolazioni SEt-
SEtCodice
UFr
FLG
Descrizione
Gamma di
regolazione
da 0 a 100 %
Compensazione RI / Boost di tensione
- Per UFt (pagina 21) = n o nLd: Compensazione RI,
- Per UFt = L o P: Boost di tensione,
Permette di ottimizzare la coppia a bassissima velocità (aumentare UFr se la coppia è insufficiente).
Accertarsi che il valore di UFr non sia troppo alto con motore a caldo (rischio d’instabilità).
Se si modifica UFt (pagina 21), UFr torna alla preregolazione di base (20 %).
Guadagno anello frequenza
da 1 a 100 %
20
Parametro accessibile solo se UFt (pagina 21) =n o nId.
Il parametro FLG regola la rampa di velocità in funzione dell’inerzia della macchina comandata.
Un eccesso di guadagno può provocare un’instabilità di funzionamento.
FLG basso
Hz
50
40
40
30
30
20
20
10
10
10
0
0
0
-10
-10
-10
In questo caso
aumentare FLG
30
20
0
0,1
0,2
0,3
0,4
0,5
t
StA basso
SdC2
0,5
t
0
0,1
0,2
0,3
0,4
0,5
t
40
30
30
20
20
10
10
10
0
0
0
-10
-10
-10
0
0,1
0,2
0,3
0,4
0,5
t
0
0,1
0,2
0,3
0,4
StA alto
Hz
40
In questo caso
aumentare StA
20
tdC2
0,4
50
30
SdC1
0,3
50
40
tdC1
0,2
StA corretto
Hz
50
tdC
0,1
In questo caso
ridurre FLG
Stabilità dell’anello frequenza
da 1 a 100 %
20
Parametro accessibile solo se UFt (pagina 21) =n o nId.
Permette di regolare il raggiungimento del regime stabilito dopo un transitorio di velocità (accelerazione o decelerazione) in
funzione della cinematica della macchina.Aumentare progressivamente la stabilità per evitare i superamenti in velocità.
Hz
IdC
0
FLG alto
Hz
50
40
SLP
FLG
Hz
50
StA
Preregolazione
di base
20
0,5
t
In questo caso
ridurre StA
0
0,1
0,2
0,3
0,4
0,5
t
Compensazione di scorrimento
da 0 a 150%
100
Parametro accessibile solo se UFt (pagina 21) =n o nId.
Permette di regolare la compensazione di scorrimento intorno al valore fissato dalla velocità nominale motore.
Sulle targhette motore le velocità indicate non sono obbligatoriamente esatte.
• Se lo scorrimento regolato è < scorrimento reale: il motore non gira alla velocità corretta in regime stabilito.
• Se lo scorrimento regolato è > scorrimento reale: il motore è sovracompensato e la velocità è instabile.
Intensità della corrente di frenatura con iniezione Vedere pag. 39 da 0 a In (1)
0,7 In (1)
di corrente continua attivata mediante ingresso
logico o scelta come modo di arresto (2).
Tempo totale di frenatura con iniezione di corrente Vedere pag. 39 da 0,1 a 30 s
0,5 s
continua scelta come modo di arresto (2).
Tempo d’iniezione di corrente continua
Vedere pag. 41 da 0,1 a 30 s
0,5 s
automatica a motore fermo.
Intensità della corrente d’iniezione automatica
Vedere pag. 41 da 0 a 1,2 In (1)
a motore fermo
2o tempo d’iniezione di corrente continua
Vedere pag. 41 da 0 a 30 s
automatica a motore fermo
2a intensità della corrente d’iniezione automatica Vedere pag. 41 da 0 a 1,2 In (1)
a motore fermo
0,7 In (1)
0s
0,5 In (1)
(1) In corrisponde alla corrente nominale variatore indicata nella guida all’installazione e sulla targhetta del variatore.
(2) Attenzione, queste regolazioni sono indipendenti dalla funzione "iniezione di corrente automatica a motore fermo".
Parametri visualizzati solo se la funzione corrispondente è stata selezionata in un altro menu. Questi parametri sono
accessibili e regolabili anche nel menu di configurazione della funzione corrispondente, per una maggiore semplicità di
programmazione. La loro descrizione è dettagliata nei rispettivi menu, nelle pagine indicate.
I parametri sottolineati appaiono nella preregolazione di base.
17
Menu regolazioni SEt-
SEtCodice
JPF
JF2
JGF
rPG
rIG
FbS
PIC
rP2
rP3
rP4
SP2
SP3
SP4
SP5
SP6
SP7
SP8
SP9
SP10
SP11
SP12
SP13
SP14
SP15
SP16
CLI
CL2
tLS
rSL
UFr2
FLG2
StA2
SLP2
Descrizione
Gamma di
Preregolazione
regolazione
di base
Frequenza mascherata
da 0 a 500
0 Hz
Impedisce un funzionamento prolungato ad una gamma di frequenza di ± 1 Hz intorno a JF2.
Questa funzione permette di eliminare una velocità critica che provoca una risonanza. La regolazione a 0
disattiva la funzione.
da 0 a 500
0 Hz
2a frequenza mascherata
Impedisce un funzionamento prolungato ad una gamma di frequenza di ± 1 Hz intorno a JPF.
Questa funzione permette di eliminare una velocità critica che provoca una risonanza. La regolazione a 0
disattiva la funzione.
Frequenza di funzionamento in marcia passoVedere pag. 46 da 0 a 10 Hz
10 Hz
passo
Guadagno proporzionale del regolatore PI
Vedere pag. 51 da 0,01 a 100
1
Guadagno integrale del regolatore PI
Vedere pag. 51 da 0,01 a 100 / s 1 / s
Coefficiente moltiplicatore del ritorno PI
Vedere pag. 51 da 0,1 a 100
1
Inversione del senso di correzione del regolatore PI Vedere pag. 51 nO - YES
nO
2o valore PI preselezionata
Vedere pag. 51 da 0 a 100 %
30 %
3o valore PI preselezionata
Vedere pag. 51 da 0 a 100 %
60 %
4o valore PI preselezionata
Vedere pag. 51 da 0 a 100 %
90 %
2a velocità preselezionata
Vedere pag. 45 da 0 a 500 Hz
10 Hz
3a velocità preselezionata
Vedere pag. 45 da 0 a 500 Hz
15 Hz
4a velocità preselezionata
Vedere pag. 45 da 0 a 500 Hz
20 Hz
5a velocità preselezionata
Vedere pag. 45 da 0 a 500 Hz
25 Hz
6a velocità preselezionata
Vedere pag. 45 da 0 a 500 Hz
30 Hz
7a velocità preselezionata
Vedere pag. 45 da 0 a 500 Hz
35 Hz
a
8 velocità preselezionata
Vedere pag. 45 da 0 a 500 Hz
40 Hz
9a velocità preselezionata
Vedere pag. 45 da 0 a 500 Hz
45 Hz
10a velocità preselezionata
Vedere pag. 45 da 0 a 500 Hz
50 Hz
11a velocità preselezionata
Vedere pag. 45 da 0 a 500 Hz
55 HZ
12a velocità preselezionata
Vedere pag. 45 da 0 a 500 Hz
60 Hz
13a velocità preselezionata
Vedere pag. 45 da 0 a 500 Hz
70 Hz
14a velocità preselezionata
Vedere pag. 45 da 0 a 500 Hz
80 Hz
15a velocità preselezionata
Vedere pag. 45 da 0 a 500 Hz
90 Hz
a
16 velocità preselezionata
Vedere pag. 45 da 0 a 500 Hz
100 Hz
Limitazione di corrente
da 0,25 a 1,5 In (1) 1,5 In (1)
Permette di limitare la coppia e il riscaldamento del motore.
2a limitazione di corrente
Vedere pag. 55 da 0,25 a 1,5 In (1) 1,5 In (1)
Tempo di funzionamento a piccola velocità
da 0 a 999,9 s
0 (nessuna
limitazione di tempo)
In seguito ad un funzionamento a LSP per un tempo definito, l’arresto del motore viene richieste automaticamente.
Il motore si riavvia se il riferimento frequenza è superiore a LSP e se è sempre presente un ordine di marcia.
Attenzione, il valore 0 corrisponde ad un tempo illimitato.
Soglia errore di riavviamento (soglia di "risveglio") Vedere pag. 52 da 0 a 100 %
0
Compensazione RI motore 2
Vedere pag. 57 da 0 a 100 %
20
Guadagno anello frequenza motore 2
Vedere pag. 57 da 1 a 100 %
20
Stabilità motore 2
Vedere pag. 57 da 1 a 100 %
20
Compensazione di scorrimento motore 2
Vedere pag. 57 da 0 a 150 %
100 %
(1) In corrisponde alla corrente nominale variatore indicata nella guida all’installazione e sulla targhetta del variatore.
Parametri visualizzati solo se la funzione corrispondente è stata selezionata in un altro menu.
Questi parametri sono accessibili e regolabili anche nel menu di configurazione della funzione corrispondente, per una
maggiore semplicità di programmazione. La loro descrizione è dettagliata nei rispettivi menu, nelle pagine indicate.
I parametri sottolineati appaiono nella preregolazione di base.
18
Menu regolazioni SEt-
SEtCodice
Ftd
ttd
Ctd
SdS
Descrizione
Gamma di
regolazione
da 0 a 500 Hz
Preregolazione
di base
bFr
Soglia di frequenza motore oltre la quale il contatto del relè
(R1 o R2 = FtA) si chiude o l’uscita AOV = 10 V (dO = StA)
Soglia dello stato termico motore oltre la quale il contatto del relè da 0 a 118 %
100 %
(R1 o R2 = tSA) si chiude o l’uscita AOV = 10 V (dO = tSA)
Soglia di corrente motore oltre la quale il contatto del relè
da 0 a 1,5 In (1)
In (1)
(R1 o R2 = CtA) si chiude o l’uscita AOV = 10 V (dO = CtA)
Fattore di scala del parametro di visualizzazione SPd1 / SPd2 / da 0,1 a 200
30
SPd3 (menu SUP- pagina 65)
Permette di visualizzare un valore proporzionale alla frequenza di uscita rFr: la velocità macchina, la velocità
motore ecc...
- se SdS y 1, visualizzazione di SPd1 (definizione possibile = 0,01)
- se 1 < SdS y 10, visualizzazione di SPd2 (definizione possibile = 0,1)
- se SdS > 10, visualizzazione di SPd3 (definizione possibile = 1)
- se SdS > 10 e SdS x rFr > 9999:
visualizzazione di Spd3 =
SdS x rFr
con 2 decimali
1000
esempio: per 24 223, viene visualizzato 24.22
- Se SdS > 10 e SdS x rFr > 65535, visualizzazione bloccata a 65.54
SFr
Esempio: Visualizzare la velocità motore
motore 4 poli, 1500 giri/mn a 50 Hz (velocità di sincronismo):
SdS = 30
SPd3 = 1500 a rFr = 50 Hz
Frequenza di commutazione
Vedere pag. 22 da 2,0 a 16 kHz
Questo parametro è accessibile anche nel menu drC-.
4 kHz
(1) In corrisponde alla corrente nominale variatore indicata nella guida all’installazione e sulla targhetta del variatore.
19
Menu controllo motore drC-
ENT
drC-
ESC
bFr
ESC
tAI
ESC
FCS
ESC
Frequenza standard motore
ENT
ESC
Ritorno alla preregolazione di base/Richiamo configurazione
ENT
I parametri possono essere modificati solo a motore fermo, senza ordine di marcia, tranne tUn, che può provocare la messa sotto
tensione del motore.
Sul terminale remotato opzionale questo menu è accessibile con commutatore in posizione
.
L’ottimizzazione delle prestazioni di funzionamento si ottiene:
- inserendo i valori indicati sulla targhetta del motore,
- avviando un autotuning (su un motore asincrono standard).
drCCodice
bFr
UnS
FrS
Descrizione
nSP
Preregolazione
di base
50
Frequenza standard motore
50 Hz: IEC
60 Hz: NEMA
Questo parametro modifica le preregolazioni dei parametri: HSP pagina 16, Ftd pagina 19, FrS pagina 20 e tFr
pagina 22.
Tensione nominale motore indicata sulla targhetta
in base al calibro in base al calibro
variatore
variatore
ATV31ppppM2: da 100 a 240 V
ATV31ppppM3X: da 100 a 240 V
ATV31ppppN4: da 100 a 500 V
ATV31ppppS6X: da 100 a 600 V
Frequenza nominale motore indicata sulla targhetta
da 10 a 500 Hz
50 Hz
Il rapporto
nCr
Gamma di
regolazione
UnS (in volt)
FrS (in Hz)
non deve superare i seguenti valori:
ATV31ppppM2: 7 max
ATV31ppppM3X: 7 max
ATV31ppppN4: 14 max
ATV31ppppS6X: 17 max
La preregolazione di base è 50 Hz, sostituita da una preregolazione di 60 Hz se bFr è impostata a 60 Hz.
Corrente nominale motore indicata sulla targhetta
da 0,25 a 1,5 In (1) in base al calibro
variatore
Velocità nominale motore indicata sulla targhetta
da 0 a 32760 RPM in base al calibro
variatore
da 0 a 9999 RPM quindi da 10.00 a 32.76 KRPM
Se la targhetta non riporta la velocità nominale ma la velocità di sincronismo e lo scorrimento in Hz o in %,
calcolare la velocità nominale come segue:
100 - scorrimento in %
• velocità nominale = velocità di sincronismo x
100
o
50 - scorrimento in Hz
• velocità nominale = velocità di sincronismo x
(motori 50 Hz)
50
o
60 - scorrimento in Hz
• velocità nominale = velocità di sincronismo x
(motori 60 Hz)
60
COS
Cos Phi motore indicato sulla targhetta
da 0,5 a 1
(1) In corrisponde alla corrente nominale variatore indicata nella guida all’installazione e sulla targhetta del variatore.
20
in base al calibro
variatore
Menu controllo motore drC-
drCCodice
rSC
tUn
tUS
UFt
Descrizione
Gamma di
regolazione
Preregolazione
di base
nO
Resistenza statorica a freddo
nO: funzione non attiva. Per applicazioni che non necessitano di
alte performances o che non tollerano la funzione autotuning
(passaggio di corrente nel motore) ad ogni messa sotto tensione.
Inlt: fuzione attiva.Per migliorare le performances a basse
velocità indipendentemente dallo stato tecnico del motore.
XXXX: Valore della resistenza statorica a freddo espressa in mΩ.
Attenzione:
• Si consiglia d’attivare questa funzione nelle applicazioni di
sollevamento e movimentazione
• La funzione va attivata a motore freddo
• Quando rSC=Inlt, il parametro tUn è forzato a POn.
Al primo ordine di marcia viene misurata la resistenza statorica e sul
parametro rSCcompare quindi il valore misurato.
• il valore XXXX può essere modificato attraverso i tasti:
Autotuning
nO
E’ assolutamente necessario che tutti i parametri motore (UnS, FrS, nCr, nSP, nSL, COS) siano configurati
correttamente prima di avviare l’autotuning.
nO: Autotuning non eseguito.
YES: L’autotuning verrà eseguito appena possibile, quindi il parametro passerà automaticamente a dOnE
o nO in caso di difetto (visualizzazione del difetto tnF se tnL = YES (vedere pag. 62).
dOnE: Utilizzo dei valori forniti dall’autotuning precedente.
rUn: L’autotuning viene eseguito ad ogni ordine di marcia.
POn: L’autotuning viene eseguito ad ogni messa sotto tensione.
LI1 a LI6: L’autotuning viene eseguito al passaggio da 0 V 1 di un ingresso logico assegnato a questa funzione.
Attenzione:
tUn è forzato a POn se rSC è diverso da nO.
L'autotuning viene eseguito solo se non è azionato alcun comando. Se una funzione "arresto ruota libera"
o "arresto rapido" è assegnata ad un ingresso logico, occorre mettere a 1 questo ingresso (attivo a 0).
L’autotuning può durare da 1 a 2 secondi. Non interrompere l’operazione ed attendere che il valore
visualizzato passi a "dOnE" o a "nO".
L’autotuning è effettuato alla corrente nominale motore.
Stato dell’autotuning (parametro a carattere informativo)
tAb
tAb: Il valore di default della resistenza statorica è utilizzato per comandare il motore.
PEnd: L'autotuning è stato richiesto ma non ancora eseguito.
PrOG: Autotuning in corso.
FAIL: L’autotuning non è riuscito.
dOnE: La resistenza statorica misurata con la funzione autotuning è utilizzata per comandare il motore.
Strd: La resistenza statorica a freddo (rSC diverso da nO) è utilizzata per comandare il motore
Scelta del tipo di legge tensione / frequenza
n
L: Coppia costante per motori in parallelo o motori speciali
P: Coppia variabile: applicazioni pompe e ventilatori
n: Controllo vettoriale del flusso senza trasduttore per applicazioni a coppia costante
nLd: Risparmio energetico, per applicazioni a coppia variabile senza bisogno di dinamica importante
(comportamento vicino alla legge P a vuoto e alla legge n in carico)
Tensione
UnS
L
n
P
FrS
nrd
Frequenza
Frequenza di commutazione aleatoria
YES
YES: Frequenza con modulazione aleatoria
nO: Frequenza fissa
La modulazione di frequenza aleatoria evita gli eventuali rumori di risonanza che potrebbero riscontrasi ad
una frequenza fissa.
21
Menu controllo motore drC-
drCCodice
SFr
tFr
SrF
Descrizione
Gamma di
regolazione
da 2,0 a 16 kHz
Frequenza di commutazione
(2)
La frequenza può essere regolata per ridurre il rumore prodotto dal motore.
Se la frequenza è regolata oltre 4 kHz, in caso di riscaldamento eccessivo il variatore riduce
automaticamente la frequenza di commutazione ripristinandola solo quando la temperatura torna normale.
Frequenza massima di uscita
da 10 a 500 Hz
60 Hz
La preregolazione di base è 60 Hz, sostituita da una preregolazione a 72 Hz se bFr è impostato a 60 Hz.
Eliminazione del filtro dell’anello di velocità
nO
nO: Il filtro dell’anello di velocità resta attivo (evita i superamenti di valore).
YES: Il filtro dell’anello di velocità è disattivato (per applicazioni con posizionamento, comporta un tempo
di risposta ridotto, con superamento possibile del valore).
FCS
SCS
Preregolazione
di base
4 kHz
Salvataggio della configurazione
nO
(1)
nO: Funzione non attiva
StrI: Effettua un salvataggio della configurazione in corso (tranne il risultato dell’autotuning) in memoria
EEPROM. SCS torna automaticamente a nO effettuato il salvataggio. Questa funzione permette di
conservare una configurazione di riserva oltre alla configurazione in corso.
Nei variatori usciti dalla fabbrica la configurazione in corso e la configurazione in memoria sono inizializzate
alla configurazione di base.
• Se il terminale remotato opzionale è collegato al variatore, saranno disponibili anche le scelte seguenti:
FIL1, FIL2, FIL3, FIL4 (file disponibili nella memoria EEPROM del terminale remotato per
salvare la configurazione in corso). Permettono di registrare da 1 a 4 configurazioni diverse, che potranno
in tal modo essere conservate o trasferite su altri variatori dello stesso calibro.
SCS torna automaticamente a nO effettuato il salvataggio.
Ritorno alla preregolazione di base / Richiamo configurazione
nO
(1)
nO: Funzione non attiva
rECI: La configurazione in corso diventa identica alla configurazione salvata precedentemente con SCS
= StrI. rECI viene visualizzato solo se è stato effettuato un salvataggio. FCS torna automaticamente a nO
terminata questa operazione.
InI: La configurazione in corso diventa identica alla preregolazione di base. FCS torna
automaticamente a nO terminata questa operazione.
• Se il terminale remotato opzionale è collegato al variatore, saranno disponibili anche le scelte seguenti,
a condizione che i file corrispondenti della memoria EEPROM del terminale remotato siano stati caricati
(da 0 a 4 file): FIL1, FIL2, FIL3, FIL4 . Permettono di sostituire la configurazione in corso
con una della quattro configurazioni che il terminale remotato può contenere.
FCS torna automaticamente a nO ad azione effettuata.
Attenzione: Se il messaggio nAd appare per un breve istante prima del passaggio a nO, significa che
il trasferimento di configurazione non è possibile e che non è stato effettuato (calibri variatori diversi ad
esempio). Se il messaggio ntr appare per un breve istante prima del passaggio a nO, significa che si
è verificato un errore di trasferimento della configurazione; in tal caso è necessario effettuare una
preregolazione di base con InI.
In entrambi i casi verificare la configurazione da trasferire prima di ritentare.
Per essere acquisiti rECI, InI e FL1 a FL4 richiedono una pressione prolungata (2 s) del tasto ENT.
(1) SCS e FCS sono accessibili da diversi menu di configurazione, ma riguardano l’insieme di tutti i menu e parametri.
(2) Parametro accessibile anche nel menu regolazione SEt-.
22
Menu Ingressi /uscite I-O-
ENT
I-O-
ESC
tCC
ESC
Comando 2 fili / 3 fili
ENT
ESC
ESC
FCS
ESC
Ritorno alla preregolazione di base / Richiamo configurazione
ENT
I parametri possono essere modificati solo a motore fermo, senza ordine di marcia.
Sul terminale remotato opzionale questo menu è accessibile con commutatore in posizione
.
I-OCodice
tCC
Descrizione
Preregolazione
di base
2C
ATV31ppppppA: LOC
Comando 2 fili / 3 fili
(Tipo di comando)
Configurazione del comando:
2C = comando 2 fili
3C = comando 3 fili
LOC = comando locale (RUN / STOP / RESET del variatore) solo per ATV31ppppppA (non visibile se LAC
= L3, vedere pag. 33).
Comando 2 fili: E’ lo stato aperto o chiuso dell’ingresso che comanda la marcia o l’arresto.
Esempio di cablaggio:
LI1: avanti
LIx: indietro
ATV 31
24 V
LI1 LIx
Comando 3 fili (Comando ad impulsi): un impulso "avanti" o "indietro" è sufficiente per comandare
l’avviamento, un impulso "stop" è sufficiente a comandare l’arresto.
Esempio di cablaggio:
ATV 31
LI1: stop
24 V LI1 LI2 LIx
LI2: avanti
LIx: indietro
tCt
rrS
La modifica di configurazione di tCC richiede la pressione prolungata (2 s) del tasto "ENT" e
comporta un ritorno alla preregolazione di base delle funzioni rrS, tCt e di tutte le funzioni assegnate
agli ingressi logici.
Tipo di comando 2 fili (parametro accessibile solo se tCC = 2C)
trn
LEL: Lo stato 0 o 1 è acquisito per la marcia o l’arresto.
trn: Un cambio di stato (transizione o fronte) è necessario per attivare la marcia al fine di evitare un
riavviamento intempestivo dopo un’interruzione dell’alimentazione.
PFO: Lo stato 0 o 1 è acquisito per la marcia o l’arresto, ma l’ingresso marcia "avanti" ha sempre priorità
sull’ingresso marcia "indietro".
Marcia indietro mediante ingresso logico
se tCC = 2C: LI2
se tCC = 3C: LI3
se tCC = LOC: nO
Se rrS = nO la marcia indietro resta attiva, con tensione negativa su AI2 ad esempio.
nO: Non configurata
LI2: Ingresso logico LI2, accessibile se tCC = 2C
LI3: Ingresso logico LI3,
LI4: Ingresso logico LI4
LI5: Ingresso logico LI5
LI6: Ingresso logico LI6
23
Menu Ingressi /uscite I-O-
I-OCodice
CrL3
CrH3
Descrizione
Preregolazione
di base
Valore per la velocità minima LSP sull’ingresso AI3, regolabile da 0 a 20 mA
4 mA
Valore per la velocità massima HSP sull’ingresso AI3, regolabile de 4 a 20 mA
20 mA
Questi due parametri consentono di configurare l’ingresso a 0-20 mA, 4-20 mA, 20-4 mA, ecc…
Frequenza
Frequenza
Esempio:
20 - 4 mA
HSP
LSP
LSP
0
CrL3
AOIt
dO
HSP
CrH3
20
AI 3
(mA)
0
CrH3
(4 mA)
CrL3
(20 mA)
AI 3
(mA)
Configurazione dell’uscita analogica
0A
0A: Configurazione 0 - 20 mA (utilizzare il morsetto AOC)
4A: Configurazione 4 - 20 mA (utilizzare il morsetto AOC)
10U: Configurazione 0 - 10 V (utilizzare il morsetto AOV)
Uscita analogica / logica AOC/AOV
nO
nO: Non configurata
OCr: Corrente motore. 20 mA o 10 V corrisponde al doppio della corrente nominale variatore
OFr: Frequenza motore. 20 mA o 10 V corrisponde alla frequenza max tFr (pagina 22)
Otr: Coppia motore. 20 mA o 10 V corrisponde al doppio della coppia nominale motore
OPr: Potenza emessa dal variatore. 20 mA o 10 V corrisponde al doppio della potenza nominale variatore
Le seguenti configurazioni (1) consentono la trasformazione dell’uscita analogica in uscita logica (vedere
schema nella guida all’installazione):
FLt: Variatore in difetto
rUn: Variatore in marcia
FtA: Soglia di frequenza raggiunta (parametro Ftd del menu SEt-, pagina 19)
FLA: Velocità massima HSP raggiunta
CtA: Soglia di corrente raggiunta (parametro Ctd del menu SEt-, pagina 19)
SrA: Valore di frequenza raggiunto
tSA: Soglia termica motore raggiunta (parametro ttd del menu SEt-, pagina 19)
bLC: Logica freno (per informazione, dal momento che questa configurazione può essere attivata o disattivata
solo dal menu FUn, vedere pag. 54)
APL: Interruzione del segnale 4-20 mA, anche se LFL = nO (pagina 62)
L’uscita logica è a 1 (24 V) quando è attiva la configurazione selezionata, ad eccezione di FLt (a 1 se il
variatore non è in difetto).
(1) Con questi valori configurare AOt = 0A.
r1
r2
24
Relè r1
FLt
nO: Non configurato
FLt: Variatore in difetto
rUn: Variatore in marcia
FtA: Soglia di frequenza raggiunta (parametro Ftd del menu SEt-, pagina 19)
FLA: Velocità massima HSP raggiunta
CtA: Soglia di corrente raggiunta (parametro Ctd del menu SEt-, pagina 19)
SrA: Valore di frequenza raggiunto
tSA: Soglia termica motore raggiunta (parametro ttd del menu SEt-, pagina 19)
APL: Interruzione del segnale 4-20 mA, anche se LFL = nO (pagina 62)
Il relè è sotto tensione quando è attiva la configurazione selezionata, ad eccezione di FLt (sotto tensione se
il variatore non è in difetto).
Relè r2
nO
nO: Non configurato
FLt: Variatore in difetto
rUn: Variatore in marcia
FtA: Soglia di frequenza raggiunta (parametro Ftd del menu SEt-, pagina 19)
FLA: Velocità massima HSP raggiunta
CtA: Soglia di corrente raggiunta (parametro Ctd del menu SEt-, pagina 19)
SrA: Valore di frequenza raggiunto
tSA: Soglia termica motore raggiunta (parametro ttd del menu SEt-, pagina 19)
bLC: Logica freno ( informazione, dal momento che questa configurazione può essere attivata o disattivata
solo dal menu FUn, vedere pag. 54)
APL: Interruzione del segnale 4-20 mA, anche se LFL = nO (pagina 62)
Il relè è sotto tensione quando è attiva la configurazione selezionata, ad eccezione di FLt (sotto tensione se
il variatore non è in difetto).
Menu Ingressi /uscite I-O-
I-OCodice
SCS
FCS
Descrizione
Preregolazione
di base
Salvataggio della configurazione
(1)
nO: Funzione non attiva
StrI: Effettua un salvataggio della configurazione in corso (tranne il risultato dell’autotuning) in memoria
EEPROM. SCS torna automaticamente a nO effettuato il salvataggio. Questa funzione permette di
conservare una configurazione di riserva oltre alla configurazione in corso.
Nei variatori usciti dalla fabbrica la configurazione in corso e la configurazione in memoria sono inizializzate
alla configurazione di base.
• Se il terminale remotato opzionale è collegato al variatore, saranno disponibili anche le scelte seguenti:
FIL1, FIL2, FIL3, FIL4 (file disponibili nella memoria EEPROM del terminale remotato per
salvare la configurazione in corso). Permettono di registrare da 1 a 4 configurazioni diverse, che potranno
in tal modo essere conservate o trasferite su altri variatori dello stesso calibro.
SCS torna automaticamente a nO effettuato il salvataggio.
Ritorno alla preregolazione di base / Richiamo configurazione
(1)
nO: Funzione non attiva
rECI: La configurazione in corso diventa identica alla configurazione salvata precedentemente con SCS
= StrI. rECI viene visualizzato solo se è stato effettuato un salvataggio. FCS torna automaticamente a nO
terminata questa operazione.
InI: La configurazione in corso diventa identica alla preregolazione di base. FCS torna
automaticamente a nO terminata questa operazione.
• Se il terminale remotato opzionale è collegato al variatore, saranno disponibili anche le scelte seguenti,
a condizione che i file corrispondenti della memoria EEPROM del terminale remotato siano stati caricati
(da 0 a 4 file): FIL1, FIL2, FIL3, FIL4 . Permettono di sostituire la configurazione in corso
con una della quattro configurazioni che il terminale remotato può contenere.
FCS torna automaticamente a nO ad azione effettuata.
Attenzione: Se il messaggio nAd appare per un breve istante prima del passaggio a nO, significa che
il trasferimento di configurazione non è possibile e che non è stato effettuato (calibri variatori diversi ad
esempio). Se il messaggio ntr appare per un breve istante prima del passaggio a nO, significa che si
è verificato un errore di trasferimento della configurazione; in tal caso è necessario effettuare una
preregolazione di base con InI.
In entrambi i casi verificare la configurazione da trasferire prima di ritentare.
Per essere acquisiti, rECI, InI e FL1 a FL4 richiedono una pressione prolungata (2 s) del tasto ENT.
(1) SCS e FCS sono accessibili da diversi menu di configurazione, ma riguardano l’insieme di tutti i menu e parametri.
25
Menu Comando CtL-
ENT
CtL-
ESC
LAC
ESC
Fr1
ESC
FCS
ESC
Livello di accesso alle funzioni
ENT
ESC
Ritorno alla preregolazione di base / Richiamo configurazione
ENT
I parametri possono essere modificati solo a motore fermo, senza ordine di marcia.
Sul terminale remotato opzionale questo menu è accessibile con commutatore in posizione
.
Canali di comando e di set up parametri
Gli ordini di comando (marcia avanti, marcia indietro ...) e l’impostazione dei parametri possono essere effettuati nei modi seguenti:
Comando CMD
tEr:
morsettiera (LI.)
LOC: tastiera (RUN/STOP) solo su ATV31ppppppA
LCC: terminale remotato (presa RJ45)
Mdb: Modbus (presa RJ45)
CAn: CANopen (presa RJ45)
Valore rFr
AI1-AI2-AI3: morsettiera
AIP: potenziometro solo su ATV31ppppppA
LCC: tastiera ATV31 o tastiera ATV31ppppppA o terminale remotato
Mdb: Modbus (presa RJ45)
CAn: CANopen (presa RJ45)
Nota:
I tasti Stop della tastiera e del terminale remotato possono conservare la loro priorità (parametro PSt del menu CtL-).
Il parametro LAC del menu CtL- permette di selezionare i modi di priorità dei canali di comando e di riferimento velocità, offrendo 3 livelli
di funzioni:
• LAC = L1:
• LAC = L2:
• LAC = L3:
Funzioni base, con priorità mediante bus di comunicazione. Questo livello offre l’intercambiabilità con l’ATV28.
Offre la possibilità di funzioni supplementari rispetto a L1:
- Più veloce / meno veloce (potenziometro motorizzato)
- Comando freno
- Commutazione 2a limitazione di corrente
- Commutazione motori
- Gestione finecorsa
Stesse possibilità che con L2, oltre alla modalità mista dei canali di comando e riferimento velocità.
I canali si combinano nel modo seguente se il parametro LAC = L1 o L2
Dal più prioritario al meno prioritario: Forzatura locale, CANopen, Modbus, Terminale remotato, Morsettiera / Tastiera (da destra a sinistra
sull’illustrazione sotto riportata).
Morsettiera
Tastiera
/
LCC
Modbus
CANopen
Terminale remotato
FLO
Forzatura locale
Vedere sinottici dettagliati pagine 28 e 29
• Sui variatori ATV31, in preregolazione di base, comando e riferimento velocità sono su morsettiera.
• Sui variatori ATV31ppppppA, in preregolazione di base, il comando è sulla tastiera integrata e il riferimento velocità sul potenziometro della tastiera
stessa.
• Con un terminale remotato, se LCC = YES (menu CtL-) il comando e il riferimento velocità dei parametri vengono dati attraverso il
terminale stesso (valore con LFr, menu SEt-)
26
Menu Comando CtLE’ possibile combinare i canali anche in modi diversi, come qui di seguito illustrato, se LAC = L3
Comando e riferimento velocità non separati (parametro CHCF = SIM):
Scelta canale riferimento:
parametro Fr1
Il canale di comando è preso
alla stessa origine
Scelta canale riferimento:
parametro Fr2
comando e riferimento velocità
H.+
Il canale di comando è preso
alla stessa origine
Il parametro rFC permette di scegliere il canale Fr1 o Fr2 o di configurare un ingresso logico o un bit della parola di comando per commutare
a distanza uno dei due.
Vedere sinottici dettagliati pagine 30 e 32.
Comando e riferimento velocità separati (parametro CHCF = SEP):
Riferimento
Scelta canale riferimento:
parametro Fr1
riferimento
velocità
Scelta canale riferimento:
parametro Fr2
H.+
Il parametro rFC permette di scegliere il canale Fr1 o Fr2 o di configurare un ingresso logico o un bit della parola di comando per commutare
a distanza uno dei due.
Comando
Scelta canale comando:
parametro Cd1
comando
Scelta canale comando:
parametro Cd2
++5
Il parametro CCS permette di scegliere il canale Cd1 o Cd2 o di configurare un ingresso logico o un bit della parola di comando per
commutare a distanza uno dei due.
Vedere sinottici dettagliati pagine 30 e 31.
27
Menu Comando CtLCanale di riferimento velocità per LAC = L1 o L2
Fr1
UPdt
Più
veloce
Nota: Se è configurata la funzione
Più veloce / Meno veloce (Fr1 = UPdt
o UPdH), gli ingressi sommatori
SA2 / SA3 non sono attivi.
Meno
veloce
UPdH
AI1
AI2
AI3
AIP
Velocità
preselezionate
nO
SA2
LFr
Terminale
remotato
(SP1)
nO
SP2
LI
AI1
SP16
AI2
Marcia
passo-passo
JOG
AI3
AIP
LI
SA3
PI non config.
nO
nO
PIF
AI3
)
Funzione PI
vedere pag. 49
nO
AI1
nO
AI2
UPdt
UPdH
Più
veloce
Meno
veloce
*
Canale 2
Fr2
AI3
Rampe
YES
AI2
Canale 1
PI config.
AI1
AIP
PIF
rFC
HSP
nO
nO
LCC
FLO
La scelta "Modbus" o "CANopen" si effettua in
linea mediante scrittura della parola di comando
corretta (vedere documentazione specifica del
bus).
AI1
AI2
AI3
AIP
Legenda:
28
LSP
Modbus
Forzatura locale
CANopen
nO
Parametro:
Il rettangolo nero rappresenta
la configurazione in preregolazione
di base
.H0
Funzione accessibile con LAC = L2
ACC DEC
AC2 DE2
H.H
Menu Comando CtLCanale di comando per LAC = L1 o L2
I parametri FLO, LCC, e la scelta del bus Modbus o CANopen sono comuni ai canali di riferimento velocità e di comando.
Esempio: LCC = YES da il comando e il riferimento mediante terminale remotato.
tCC
LCC
FLO
Tastiera
ATV31ppppppA
Terminale
remotato
CMD
(Avanti
Indietro
STOP
Tastiera ATV31ppppppA
Terminale remotato
PSt
(priorità
STOP)
Legenda:
Parametro:
Il rettangolo nero rappresenta
la configurazione in preregolazione di base
29
Menu Comando CtLCanale di riferimento velocità per LAC = L3
Fr1
UPdt
Più
veloce
Nota: Se è configurata la funzione Più veloce / Meno veloce (Fr1 = UPdt o UPdH), gli
ingressi sommatori SA2 / SA3 non sono attivi.
Meno
veloce
UPdH
FLOC
AI1
AI1
AI2
LFr
AI2
Velocità
preselezionate
AI3
AIP
LCC
LFr
AI3
AIP
nO
LCC
Mdb
Terminale
remotato
(SP1)
Terminale
remotato
CAn
SP2
SA2
LI
SP16
Marcia
passopasso JOG
nO
LI
AI1
Mdb
AI2
PI non config.
CAn
LFr
AI3
AIP
PIF
nO
PI config.
LCC
Mdb
Canale 1
Terminale
remotato
CAn
SA3
Rampe
LI
HSP
nO
Canale 2
nO
nO
AI1
rFC
FLO
LSP
.H0
ACC DEC
AC2 DE2
Forzatura locale
AI2
LFr
AI3
PIF
AIP
LCC
)
Funzione PI
vedere pag. 49
nO
Terminale
remotato
Mdb
AI1
CAn
AI2
Fr2
UPdt
UPdH
AI3
Più
veloce
Meno
veloce
*
nO
AI1
Legenda:
AI2
LFr
AI3
AIP
LCC
Terminale
remotato
30
Mdb
CAn
Parametro:
Il rettangolo nero rappresenta la
configurazione in preregolazione
di base
H.H
Menu Comando CtLCanale di comando per LAC = L3
Riferimento e comando non separati
I parametri Fr1, Fr2, rFC, FLO e FLOC sono comuni per il riferimento velocità e il comando. Il canale di comando è quindi determinato dal canale
di riferimento.
Esempio: se Fr1 = AI1 (ingresso analogico alla morsettiera) il comando è mediante LI (ingresso logico alla morsettiera).
Fr1
FLOC
Tastiera
ATV31ppppppA
Tastiera
ATV31ppppppA
Terminale
remotato
Terminale remotato
rFC
FLO
CHCF
Tastiera
ATV31ppppppA
Tastiera
ATV31ppppppA
Fr2
Forzatura locale
Avanti
Indietro
STOP
PSt
(priorità STOP)
Terminale
remotato
Terminale remotato
Legenda:
Parametro:
Il rettangolo nero rappresenta
la configurazione in preregolazione di base
31
Menu Comando CtLCanale di comando per LAC = L3
Modo misto (riferimento e comando separati)
I parametri FLO e FLOC sono comuni per il riferimento e il comando.
Esempio: in caso di riferimento in forzatura locale mediante AI1 (ingresso analogico alla morsettiera) il comando in forzatura locale è effettuato tramite LI (ingresso logico alla morsettiera).
FLOC
Cd1
Tastiera
ATV31ppppppA
Tastiera
ATV31ppppppA
Terminale
remotato
Terminale
remotato
CCS
FLO
CHCF
Forzatura locale
Tastiera
ATV31ppppppA
Tastiera
ATV31ppppppA
Cd2
Terminale
remotato
Legenda:
Parametro:
Il rettangolo nero rappresenta
la configurazione in preregolazione di base
32
PSt
(priorità STOP)
Terminale remotato
Avanti
Indietro
STOP
Menu Comando CtL-
Può esserci incompatibilità tra alcune funzioni (vedere tabella d’incompatibilità 13). In questo caso la prima funzione configurata
impedisce la configurazione delle altre.
CtLCodice
LAC
Descrizione
Gamma di
regolazione
Preregolazione
di base
Livello di accesso alle funzioni
L1
L1: Accesso alle funzioni standard. Questo livello consente naturalmente l’intercambiabilità con l’ATV28.
L2: Accesso alle funzioni avanzate nel menu Fun:
- Più veloce / meno veloce (potenziometro motorizzato)
- Comando freno
- Commutazione 2a limitazione di corrente
- Commutazione motori
- Gestione finecorsa
L3: Accesso alle funzioni avanzate e gestione modi di comando misti.
La configurazione di LAC a L3 provoca il ritorno alla preregolazione di base dei parametri
Fr1 (qui sotto), Cd1 (pagina 34), CHCF (pagina 34), e tCC (pagina 23), quest’ultimo forzato
a "2C" sui variatori ATV31ppppppA.
Il ritorno di L3 a L2 o L1 e il ritorno di L2 a L1 possono essere effettuati solo con una
"preregolazione di base" mediante FCS (pagina 36).
Fr1
La modifica di configurazione di LAC richiede la pressione prolungata di 2 secondi del tasto "ENT".
Configurazione valore 1
AI1
AIP per
ATV31ppppppA
AI1: Ingresso analogico AI1
AI2: Ingresso analogico AI2
AI3: Ingresso analogico AI3
AIP: Potenziometro (solo ATV31ppppppA)
Se LAC = L2 o L3, sono possibili le seguenti configurazioni aggiuntive:
UPdt: (1) Set up +veloce -veloce con LI
UpdH: (1) Set up + veloce/- veloce con i tasti r
della tastiera ATV31 o ATV31ppppppA o del terminale
remotato. Per impiego visualizzare la frequenza con rFr (vedere pag. 65)
r
Se LAC = L3, sono possibili le seguenti configurazioni aggiuntive:
Fr2
LCC: Set up mediante terminale remotato, parametro con LFr del menu SEt pagina 16.
Ndb: Set up via Modbus
CAn: Set up via CANopen
Configurazione valore 2
nO
nO: Non configurata
AI1: Ingresso analogico AI1
AI2: Ingresso analogico AI2
AI3: Ingresso analogico AI3
AIP: Potenziometro (solo ATV31ppppppA)
Se LAC = L2 o L3, sono possibili le seguenti configurazioni aggiuntive:
UPdt: (1) Set up +veloce -veloce con LI
UpdH: (1) Set up + veloce/- veloce con i tasti r
della tastiera ATV31 o ATV31ppppppA o del terminale
remotato.Visualizzare la frequenza rFr (vedere pag. 65)
r
Se LAC = L3, sono possibili le seguenti configurazioni aggiuntive:
LCC: Set up con il terminale remotato, parametro LFr del menu SEt pagina 16.
Ndb: Set up via Modbus
CAn: Set up via CANopen
(1) Attenzione, non si possono configurare contemporaneamente UPdt a Fr1 o Fr2 e UPdH a Fr1 o Fr2. E’ consentita una sola
configurazione UPdt / UPdH su un solo canale di riferimento velocità.
33
Menu comando CtL-
CtLCodice
rFC
Descrizione
Gamma di
regolazione
Preregolazione
di base
Commutazione valore
Fr1
Il parametro rFC permette di scegliere il canale Fr1 o Fr2 o di configurare un ingresso logico o un bit di
comando per commutare Fr1 o Fr2 a distanza.
Fr1: Parametro = riferimento 1
Fr2: Parametro = riferimento 2
LI1: Ingresso logico LI1
LI2: Ingresso logico LI2
LI3: Ingresso logico LI3
LI4: Ingresso logico LI4
LI5: Ingresso logico LI5
LI6: Ingresso logico LI6
Se LAC = L3, sono possibili le seguenti configurazioni aggiuntive:
C111: Bit 11 della parola di comando Modbus
C112: Bit 12 della parola di comando Modbus
C113: Bit 13 della parola di comando Modbus
C114: Bit 14 della parola di comando Modbus
C115: Bit 15 della parola di comando Modbus
C211: Bit 11 della parola di comando CANopen
C212: Bit 12 della parola di comando CANopen
C213: Bit 13 della parola di comando CANopen
C214: Bit 14 della parola di comando CANopen
C215: Bit 15 della parola di comando CANopen
CHCF
Cd1
Cd2
La commutazione del parametro impostato può essere effettuata in marcia.
Allo stato 0 dell’ingresso logico o del bit della parola di comando Fr1 è attivo.
Allo stato 1 dell’ingresso logico o del bit della parola di comando Fr2 è attivo.
Modo misto (canali di comando separati dai canali di riferimento)
Accessibile se LAC = L3
SIN: Non separati
SEP: Separati
Configurazione del canale di comando 1
Accessibile se CHCF = SEP e LAC = L3
tEr: Comando morsettiera
LOC: Comando tastiera (solo ATV31ppppppA)
LCC: Comando terminale remotato
Ndb: Comando via Modbus
CAn: Comando via CAN
Configurazione del canale di comando 2
Accessibile se CHCF = SEP e LAC = L3
tEr: Comando morsettiera
LOC: Comando tastiera (solo ATV31ppppppA)
LCC: Comando terminale remotato
Ndb: Comando via Modbus
CAn: Comando via CAN
Parametri visualizzati solo se la funzione è stata validata.
34
SIM
tEr
LOC per
ATV31ppppppA
Mdb
Menu comando CtL-
CtLCodice
CCS
COp
LCC
PSt
rOt
Descrizione
Gamma di
regolazione
Preregolazione
di base
Cd1
Commutazione canale di comando
Accessibile se CHCF = SEP e LAC = L3
Il parametro CCS permette di scegliere il canale Cd1 o Cd2 o di configurare un ingresso logico o un bit di
comando per commutare Cd1 o Cd2 a distanza.
Cd1: Canale comando = canale 1
Cd2: Canale comando = canale 2
LI1: Ingresso logico LI1
LI2: Ingresso logico LI2
LI3: Ingresso logico LI3
LI4: Ingresso logico LI4
LI5: Ingresso logico LI5
LI6: Ingresso logico LI6
C111: Bit 11 della parola di comando Modbus
C112: Bit 12 della parola di comando Modbus
C113: Bit 13 della parola di comando Modbus
C114: Bit 14 della parola di comando Modbus
C115: Bit 15 della parola di comando Modbus
C211: Bit 11 della parola di comando CANopen
C212: Bit 12 della parola di comando CANopen
C213: Bit 13 della parola di comando CANopen
C214: Bit 14 della parola di comando CANopen
C215: Bit 15 della parola di comando CANopen
Allo stato 0 dell’ingresso o del bit della parola di comando, il canale 1 è attivo,
allo stato 1 dell’ingresso o del bit della parola di comando, il canale 2 è attivo.
Copia canale 1 verso canale 2
nO
(copia solo in questo senso)
Accessibile se LAC = L3
nO: Nessuna copia
SP: Copia del riferimento
Cd: Copia del comando
ALL: Copia del comando e del riferimento
• Se il comando del canale 2 è da morsettiera, il comando del canale 1 non viene copiato.
• Se il riferimento del canale 2 è dato attraverso AI1, AI2, AI3 o AIP, il riferimento del canale 1 non viene
copiato.
• Il riferimento copiato è FrH (riferimento impostato), tranne il caso in cui il riferimento del canale 2 sia dato
tramite la funzione più veloce / meno veloce. In questo caso viene copiato il valore di rFr (frequenza motore).
- Una copia di comando singolo e/o di riferimento singolo può provocare la modifica del senso di
rotazione.
Comando tramite terminale remotato
nO
Parametro accessibile solo con l’opzione terminale remotato e per LAC = L1 o L2.
nO: Funzione non attiva
YES: Permette di validare il comando del variatore con i tasti STOP/RESET, RUN e FWD/REV del
terminale. Il valore della velocità è quindi dato dal parametro LFr del menu SEt-. Solo i comandi arresto ruota
libera, arresto rapido e arresto con iniezione di corrente restano attivi mediante morsettiera. Se il
collegamento variatore / terminale è interrotto o se il terminale non è presente il variatore si blocca
segnalando un difetto SLF.
Priorità stop
YES
Questa funzione dà la priorità al tasto STOP della tastiera (solo ATV31ppppppA) o al tasto STOP del
terminale remotato, qualunque sia il canale di comando (morsettiera o bus di comunicazione).
nO : Funzione non attiva
YES: Priorità tasto STOP
La modifica di configurazione di PSt richiede la pressione prolungata di 2 secondi del tasto "ENT".
Senso di marcia autorizzato
dFr
Senso di marcia autorizzato per il tasto RUN della tastiera (solo ATV31ppppppA) o il tasto RUN del
terminale remotato.
dFr: Avanti
drS: Indietro
bOt: Sono autorizzati entrambi i sensi di marcia (tranne per la tastiera dell’ATV31ppppppA: solo Avanti).
Parametri visualizzati solo se la funzione è stata validata.
35
Menu comando CtL-
CtLCodice
Descrizione
Gamma di
regolazione
Preregolazione
di base
SCS
Salvataggio della configurazione (1)
nO: Funzione non attiva
StrI: Effettua un salvataggio della configurazione in corso (tranne il risultato dell’autotuning) in memoria
EEPROM. SCS torna automaticamente a nO effettuato il salvataggio. Questa funzione permette di
conservare una configurazione di riserva oltre alla configurazione in corso.
Nei variatori usciti dalla fabbrica la configurazione in corso e la configurazione in memoria sono inizializzate
alla configurazione di base.
• Se il terminale remotato opzionale è collegato al variatore, saranno disponibili anche le scelte seguenti:
FIL1, FIL2, FIL3, FIL4 (file disponibili nella memoria EEPROM del terminale remotato per
salvare la configurazione in corso). Permettono di registrare da 1 a 4 configurazioni diverse, che potranno
in tal modo essere conservate o trasferite su altri variatori dello stesso calibro.
SCS torna automaticamente a nO effettuato il salvataggio.
FCS
Ritorno alla preregolazione di base / Richiamo configurazione
(1)
nO: Funzione non attiva
rECI: La configurazione in corso diventa identica alla configurazione salvata precedentemente con SCS
= StrI. rECI viene visualizzato solo se è stato effettuato un salvataggio. FCS torna automaticamente a nO
terminata questa operazione.
InI: La configurazione in corso diventa identica alla preregolazione di base. FCS torna
automaticamente a nO terminata questa operazione.
• Se il terminale remotato opzionale è collegato al variatore, saranno disponibili anche le scelte seguenti,
a condizione che i file corrispondenti della memoria EEPROM del terminale remotato siano stati caricati
(da 0 a 4 file): FIL1, FIL2, FIL3, FIL4 . Permettono di sostituire la configurazione in corso
con una della quattro configurazioni che il terminale remotato può contenere.
FCS torna automaticamente a nO ad azione effettuata.
Attenzione: Se il messaggio nAd appare per un breve istante prima del passaggio a nO, significa che
il trasferimento di configurazione non è possibile e che non è stato effettuato (calibri variatori diversi ad
esempio). Se il messaggio ntr appare per un breve istante prima del passaggio a nO, significa che si
è verificato un errore di trasferimento della configurazione; in tal caso è necessario effettuare una
preregolazione di base con InI.
In entrambi i casi verificare la configurazione da trasferire prima di ritentare.
Per essere acquisiti, rECI, InI e FL1 a FL4 richiedono una pressione prolungata (2 s) del tasto ENT.
(1) SCS e FCS sono accessibili da diversi menu di configurazione, ma riguardano l’insieme di tutti i menu e parametri.
36
Menu Funzioni applicazioni FUn-
ENT
FUn-
ESC
ESC
ESC
rPCSA1-
ENT
ENT
ESC
ESC
ENT
ENT
ESC
ESC
Sotto-menu
Sotto-menu
ENT
FCS
ESC
I parametri possono essere modificati solo a motore fermo, senza ordine di marcia.
Sul terminale remotato opzionale questo menu è accessibile con commutatore in posizione
.
Alcune funzioni comprendono numerosi parametri. Per rendere più chiara la programmazione ed evitare un fastidioso scorrimento dei
parametri, le funzioni sono state raggruppate in sotto-menu.
I sotto-menu sono riconoscibili grazie al trattino posto a destra del codice, come nei menu: PSS- ad esempio.
Ci può essere incompatibilità tra alcune funzioni (vedere tabella d’incompatibilità 13). In questo caso la prima funzione configurata
impedisce la configurazione delle altre.
FUnCodice
Descrizione
rPCrPt
Gamma di
regolazione
Preregolazione
di base
Rampe
Tipo di rampa
LIn
Definisce l’andamento delle rampe di accelerazione e decelerazione.
LIn: lineare
S: a S
U: a U
CUS: personalizzato
Rampe a S
Il coefficiente d'arrotondamento è fisso,
con t2 = 0,6 x t1
con t1 = tempo di rampa regolato.
Rampe a U
Il coefficiente d'arrotondamento è fisso,
con t2 = 0,5 x t1
con t1 = tempo di rampa regolato.
Rampe personnalizzate
tA1
tA1: regolabile da 0 a 100 % (di ACC o AC2)
tA2: regolabile da 0 a (100 % - tA1) (di ACC o AC2)
tA3: regolabile da 0 a 100 % (di dEC o dE2)
tA4: regolabile da 0 a (100 % - tA3) (di dEC o dE2)
Arrontondamento inizio rampa accelerazione tipo da 0 a 100
CUS in % del tempo totale di rampa (ACC o AC2)
10 %
Parametri visualizzati solo se la funzione è stata validata.
37
Menu Funzioni applicazioni FUn-
FUnCodice
rPC(segue)
Descrizione
tA2
tA3
tA4
ACC
dEC
rPS
Gamma di
regolazione
da 0 a (100-tA1)
Preregolazione
di base
10 %
Arrotondamento fine rampa accelerazione tipo
CUS in % del tempo totale di rampa (ACC o AC2)
Arrotondamento inizio rampa decelerazione tipo da 0 a 100
10 %
CUS in % del tempo totale di rampa (dEC o dE2)
Arrotondamento fine rampa decelerazione tipo
da 0 a (100-tA3) 10 %
CUS in % del tempo totale di rampa (dEC o dE2)
Tempi delle rampe di accelerazione e di
0,1 a 999,9 s
3s
decelerazione (1)
0,1 a 999,9 s
3s
Definiti per accelerare e decelerare passando da 0 alla frequenza nominale FrS
(parametro del menu drC-).
Accertarsi che il valore di dEC non sia troppo basso rispetto al carico da fermare.
Commutazione di rampa su ingresso logico
nO
Questa funzione resta attiva qualunque sia il canale di comando.
nO: Non configurata
LI1: Ingresso logico LI1
LI2: Ingresso logico LI2
LI3: Ingresso logico LI3
LI4: Ingresso logico LI4
LI5: Ingresso logico LI5
LI6: Ingresso logico LI6
Se LAC = L3, sono possibili le seguenti configurazioni:
Cd11: Bit 11 della parola di comando Modbus o CANopen
Cd12: Bit 12 della parola di comando Modbus o CANopen
Cd13: Bit 13 della parola di comando Modbus o CANopen
Cd14: Bit 14 della parola di comando Modbus o CANopen
Cd15: Bit 15 della parola di comando Modbus o CANopen
Frt
Allo stato 0 dell’ingresso logico o del bit della parola di comando, ACC e dEC sono
considerati.
Allo stato 1 dell’ingresso logico o del bit della parola di comando, AC2 e dE2 sono
considerati.
Soglia di commutazione di rampa
da 0 a 500 Hz
0
a
Commutazione 2 rampa se Frt è diverso da 0 (il valore 0 corrisponde alla funzione non
attiva) e frequenza di uscita superiore a Frt.
La commutazione della rampa mediante soglia può essere aggiunta alla commutazione
tramite LI o bit nel modo seguente:
LI o bit
0
0
1
1
Frequenza
<Frt
>Frt
<Frt
>Frt
Rampa
ACC, dEC
AC2, dE2
AC2, dE2
AC2, dE2
2o tempo della rampa di accelerazione (1):
da 0,1 a 999,9 s
5s
Validati mediante ingresso logico (rPS) o soglia di
frequenza (Frt).
dE2
2o tempo della rampa di decelerazione (1):
da 0,1 a 999,9 s
5s
Validati mediante ingresso logico (rPS) o soglia di
frequenza (Frt).
brA
Adattamento rampa di decelerazione
YES
L’attivazione di questa funzione permette di regolare automaticamente la rampa di
decelerazione, se questa è stata impostata ad un valore troppo basso tenuto conto
dell’inerzia del carico.
nO: funzione non attiva
YES: funzione attiva. La funzione è incompatibile con le applicazioni che richiedono:
• un posizionamento su rampa
• l’utilizzo di una resistenza di frenatura (questa non garantirebbe la sua funzione)
brA è forzato a nO se è configurato il comando freno bLC (pagina 54).
(1) Parametro accessibile anche nel menu regolazione SEt.
AC2
Parametri visualizzati solo se la funzione è stata validata.
38
Menu Funzioni applicazioni FUn-
FUnCodice
Descrizione
StCStt
FSt
Gamma di
regolazione
Preregolazione
di base
Modi di arresto
Modo di arresto normale
Stn
Modo di arresto alla scomparsa dell’ordine di marcia o alla comparsa di un comando Stop.
rNP: Su rampa
FSt: Arresto rapido
nSt: Arresto ruota libera
dCI: Arresto con iniezione di corrente continua
Arresto rapido mediante ingresso logico
nO
nO: Non configurata
LI1: Ingresso logico LI1
LI2: Ingresso logico LI2
LI3: Ingresso logico LI3
LI4: Ingresso logico LI4
LI5: Ingresso logico LI5
LI6: Ingresso logico LI6
Se LAC = L3, sono possibili le seguenti configurazioni:
Cd11: Bit 11 della parola di comando Modbus o CANopen
Cd12: Bit 12 della parola di comando Modbus o CANopen
Cd13: Bit 13 della parola di comando Modbus o CANopen
Cd14: Bit 14 della parola di comando Modbus o CANopen
Cd15: Bit 15 della parola di comando Modbus o CANopen
dCF
dCI
L’arresto viene attivato allo stato logico 0 dell’ingresso e allo stato 1 del bit della parola di
comando. L’arresto rapido è un arresto su rampa diviso il parametro dCF. Se l’ingresso torna allo
stato 1 ed il comando di marcia è sempre attivo, il motore riparte solo se è stato configurato il
comando 2 fili su livello (tCC = 2C e tCt = LEL o PFO, vedere pag. 23). Negli altri casi è
necessario un nuovo ordine di marcia.
Coefficiente di divisione del tempo della rampa da 0 a 10
4
di decelerazione per l’arresto rapido.
Accertarsi che la rampa ridotta non sia troppo corta rispetto al carico da fermare.
Il valore 0 corrisponde alla rampa minima.
Iniezione di corrente continua da ingresso logico
nO
nO: Non configurata
LI1: Ingresso logico LI1
LI2: Ingresso logico LI2
LI3: Ingresso logico LI3
LI4: Ingresso logico LI4
LI5: Ingresso logico LI5
LI6: Ingresso logico LI6
Se LAC = L3, sono possibili le seguenti configurazioni:
Cd11: Bit 11 della parola di comando Modbus o CANopen
Cd12: Bit 12 della parola di comando Modbus o CANopen
Cd13: Bit 13 della parola di comando Modbus o CANopen
Cd14: Bit 14 della parola di comando Modbus o CANopen
Cd15: Bit 15 della parola di comando Modbus o CANopen
IdC
tdC
La frenatura viene attivata allo stato logico 1 dell’ingresso o del bit della parola di comando.
Intensità della corrente di frenatura con iniezione da 0 a In (2)
0,7 In (2)
di corrente continua attivata da ingresso logico o
scelta come modo di arresto (1)(3)
Trascorsi 5 secondi la corrente d'iniezione viene tagliata a 0,5 Ith se è regolata ad un
valore superiore.
Tempo totale di frenatura con iniezione di corrente da 0,1 a 30 s
0,5 s
continua scelta come modo di arresto normale (1)(3)
(1) Parametro accessibile anche nel menu regolazione SEt-.
(2) In corrisponde alla corrente nominale variatore indicata nella guida all’installazione e sulla targhetta del variatore.
(3) Attenzione, queste regolazioni sono indipendenti dalla funzione "iniezione di corrente automatica a motore fermo".
Parametri visualizzati solo se la funzione è stata validata.
39
Menu Funzioni applicazioni FUn-
FUnCodice
StC(segue)
Descrizione
nSt
Arresto ruota libera mediante ingresso logico
nO: Non configurata
LI1: Ingresso logico LI1
LI2: Ingresso logico LI2
LI3: Ingresso logico LI3
LI4: Ingresso logico LI4
LI5: Ingresso logico LI5
LI6: Ingresso logico LI6
Gamma di
regolazione
Preregolazione
di base
nO
L'arresto viene attivato allo stato logico 0 dell’ingresso. Se l'ingresso torna allo stato 1 e il
comando di marcia è sempre attivo, il motore si riavvia solo se è stato configurato il comando
2 fili su livello. Negli altri casi è necessario un nuovo ordine di marcia.
40
Menu Funzioni applicazioni FUn-
FUnCodice
Descrizione
AdCAdC
tdC1
SdC1
Gamma di
regolazione
Preregolazione
di base
Iniezione di corrente continua a motore fermo
Iniezione di corrente automatica a motore
YES
fermo (a fine rampa)
nO: Nessuna iniezione
YES: Iniezione di durata regolabile, a motore fermo
Ct: Iniezione permanente a motore fermo.
Questo parametro provoca lo stabilirsi della corrente d’iniezione anche senza
ordine di marcia. E’ accessibile in marcia.
Tempo d’iniezione di corrente continua
da 0,1 a 30 s
automatica a motore fermo (1).
Intensità della corrente d’iniezione automatica da 0 a 1,2 In (2)
a motore fermo (1)
0,5 s
0,7 In (2)
Accertarsi che il motore sopporti questa corrente senza surriscaldarmento.
tdC2
SdC2
2o tempo d’iniezione di corrente continua
automatica a motore fermo (1).
2a intensità della corrente d’iniezione
automatica a motore fermo (1)
da 0 a 30 s
0s
da 0 a 1,2 In (2)
0,5 In (2)
Accertarsi che il motore sopporti questa corrente senza surriscaldamento.
AdC
SdC2
Funzionamento
YES
x
Ct
≠0
Ct
=0
Ordine di marcia
Velocità
(1) Parametro accessibile anche nel menu regolazione SEt-.
(2) In corrisponde alla corrente nominale variatore indicata nella guida all’installazione e sulla targhetta del variatore.
Parametri visualizzati solo se la funzione è stata validata.
41
Menu Funzioni applicazioni FUn-
FUnCodice
Descrizione
SAISA2
Gamma di
regolazione
Preregolazione
di base
Ingressi sommatori
Permette di sommare uno o due ingressi solo al riferimento velocità Fr1.
Sommatore ingresso 2
AI2
nO: Non configurato
AI1: Ingresso analogico AI1
AI2: Ingresso analogico AI2
AI3: Ingresso analogico AI3
AIP: Potenziometro (solo variatori tipo A)
Se LAC = L3, sono possibili le seguenti configurazioni:
SA3
Ndb: Set up via Modbus
CAn: Set up via CANopen
LCC: Set up tramite terminale remotato, parametro LFr del menu SEt pagina 16.
Sommatore ingresso 3
nO
nO: Non configurato
AI1: Ingresso analogico AI1
AI2: Ingresso analogico AI2
AI3: Ingresso analogico AI3
AIP: Potenziometro (solo variatori tipo A)
Se LAC = L3, sono possibili le seguenti configurazioni:
Ndb: Set up via Modbus
CAn: Set up via CANopen
LCC: Set up tramite terminale remotato, parametro LFr del menu SEt pagina 16.
Ingressi sommatori
.H
5)
5)!
Vedere sinottici completi pagine 28 e 30.
42
Nota:
AI2 è un ingresso analogico
differenziale (± 10 V) che consente
una sottrazione per somma di un
segnale negativo
Menu Funzioni applicazioni FUnVelocità preselezionate
Possono essere preselezionate 2, 4, 8, o 16 velocità che richiedono rispettivamente 1, 2, 3 o 4 ingressi logici.
L’ordine delle configurazioni da rispettare è il seguente: PS2, quindi PS4 quindi PS8 e infine PS16.
Tabella di combinazione degli ingressi velocità preselezionati
16 velocità
LI (PS16)
0
0
0
0
0
0
0
0
1
1
1
1
1
1
1
1
8 velocità
LI (PS8)
0
0
0
0
1
1
1
1
0
0
0
0
1
1
1
1
4 velocità
LI (PS4)
0
0
1
1
0
0
1
1
0
0
1
1
0
0
1
1
2 velocità
LI (PS2)
0
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
Valore velocità
Valore (1)
SP2
SP3
SP4
SP5
SP6
SP7
SP8
SP9
SP10
SP11
SP12
SP13
SP14
SP15
SP16
(1) Vedere sinottici pagina 28 e pagina 30: valore 1 = (SP1).
43
Menu Funzioni applicazioni FUn-
FUnCodice
Descrizione
PSSPS2
Gamma di
regolazione
Velocità preselezionate
2 velocità preselezionate
La scelta dell’ingresso logico configurato convalida la funzione.
nO: Non configurata
LI1: Ingresso logico LI1
LI2: Ingresso logico LI2
LI3: Ingresso logico LI3
LI4: Ingresso logico LI4
LI5: Ingresso logico LI5
LI6: Ingresso logico LI6
Preregolazione
di base
Se tCC = 2C: LI3
Se tCC = 3C: nO
Se tCC = LOC: LI3
Se LAC = L3, sono possibili le seguenti configurazioni:
PS4
Cd11: Bit 11 della parola di comando Modbus o CANopen
Cd12: Bit 12 della parola di comando Modbus o CANopen
Cd13: Bit 13 della parola di comando Modbus o CANopen
Cd14: Bit 14 della parola di comando Modbus o CANopen
Cd15: Bit 15 della parola di comando Modbus o CANopen
4 velocità preselezionate
La scelta dell’ingresso logico configurato convalida la funzione.
Accertarsi che PS2 sia stato configurato prima di configurare PS4.
Se tCC = 2C: LI4
Se tCC = 3C: nO
Se tCC = LOC: LI4
nO: Non configurata
LI1: Ingresso logico LI1
LI2: Ingresso logico LI2
LI3: Ingresso logico LI3
LI4: Ingresso logico LI4
LI5: Ingresso logico LI5
LI6: Ingresso logico LI6
Se LAC = L3, sono possibili le seguenti configurazioni:
PS8
Cd11: Bit 11 della parola di comando Modbus o CANopen
Cd12: Bit 12 della parola di comando Modbus o CANopen
Cd13: Bit 13 della parola di comando Modbus o CANopen
Cd14: Bit 14 della parola di comando Modbus o CANopen
Cd15: Bit 15 della parola di comando Modbus o CANopen
8 velocità preselezionate
La scelta dell’ingresso logico configurato convalida la funzione.
Accertarsi che PS4 sia stato configurato prima di configurare PS8.
nO: Non configurata
LI1: Ingresso logico LI1
LI2: Ingresso logico LI2
LI3: Ingresso logico LI3
LI4: Ingresso logico LI4
LI5: Ingresso logico LI5
LI6: Ingresso logico LI6
Se LAC = L3, sono possibili le seguenti configurazioni:
Cd11: Bit 11 della parola di comando Modbus o CANopen
Cd12: Bit 12 della parola di comando Modbus o CANopen
Cd13: Bit 13 della parola di comando Modbus o CANopen
Cd14: Bit 14 della parola di comando Modbus o CANopen
Cd15: Bit 15 della parola di comando Modbus o CANopen
44
nO
Menu Funzioni applicazioni FUn-
FUnCodice
PS16
Descrizione
Gamma di
regolazione
16 velocità preselezionate
La scelta dell’ingresso logico configurato convalida la funzione.
Accertarsi che PS8 sia stato configurato prima di configurare PS16.
Preregolazione
di base
nO
nO: Non configurata
LI1: Ingresso logico LI1
LI2: Ingresso logico LI2
LI3: Ingresso logico LI3
LI4: Ingresso logico LI4
LI5: Ingresso logico LI5
LI6: Ingresso logico LI6
Se LAC = L3, sono possibili le seguenti configurazioni:
SP2
SP3
SP4
SP5
SP6
SP7
SP8
SP9
SP10
SP11
SP12
SP13
SP14
SP15
SP16
Cd11: Bit 11 della parola di comando Modbus o CANopen
Cd12: Bit 12 della parola di comando Modbus o CANopen
Cd13: Bit 13 della parola di comando Modbus o CANopen
Cd14: Bit 14 della parola di comando Modbus o CANopen
Cd15: Bit 15 della parola di comando Modbus o CANopen
2a velocità preselezionata (1)
da 0,0 a 500,0 Hz
a
3 velocità preselezionata (1)
da 0,0 a 500,0 Hz
4a velocità preselezionata (1)
da 0,0 a 500,0 Hz
5a velocità preselezionata (1)
da 0,0 a 500,0 Hz
6a velocità preselezionata (1)
da 0,0 a 500,0 Hz
7a velocità preselezionata (1)
da 0,0 a 500,0 Hz
8a velocità preselezionata (1)
da 0,0 a 500,0 Hz
9a velocità preselezionata (1)
da 0,0 a 500,0 Hz
10a velocità preselezionata (1)
da 0,0 a 500,0 Hz
11a velocità preselezionata (1)
da 0,0 a 500,0 Hz
12a velocità preselezionata (1)
da 0,0 a 500,0 Hz
13a velocità preselezionata (1)
da 0,0 a 500,0 Hz
14a velocità preselezionata (1)
da 0,0 a 500,0 Hz
15a velocità preselezionata (1)
da 0,0 a 500,0 Hz
16a velocità preselezionata (1)
da 0,0 a 500,0 Hz
10 Hz
15 Hz
20 Hz
25 Hz
30 Hz
35 Hz
40 Hz
45 Hz
50 Hz
55 Hz
60 Hz
70 Hz
80 Hz
90 Hz
100 Hz
(1) Parametro accessibile anche nel menu regolazione SEt-.
Parametri visualizzati solo se la funzione è stata validata.
45
Menu Funzioni applicazioni FUn-
FUnCodice
Descrizione
JOGJOG
Gamma di
regolazione
Marcia passo-passo JOG
Marcia passo-passo
Preregolazione
di base
Se tCC = 2C: nO
Se tCC = 3C: LI4
Se tCC = LOC: nO
La scelta dell’ingresso logico configurato convalida la funzione.
nO: Non configurata
LI1: Ingresso logico LI1
LI2: Ingresso logico LI2
LI3: Ingresso logico LI3
LI4: Ingresso logico LI4
LI5: Ingresso logico LI5
LI6: Ingresso logico LI6
Esempio: Funzionamento in comando 2 fili (tCC = 2C)
Frequenza
motore
Rampa
DEC / DE2
Rampa
forzata a 0,1 s
Riferimento
Riferimento
JGF
Riferimento
JGF
LI (JOG)
u 0,5 s
Avanti
Indietro
JGF
Valore di riferimento in marcia passo-passo (1) da 0 a 10 Hz
(1) Parametro accessibile anche nel menu regolazione SEt-.
Parametri visualizzati solo se la funzione è stata validata.
46
10 Hz
Menu Funzioni applicazioni FUnPiù veloce / meno veloce
Funzione accessibile solo se LAC = L2 o L3 (vedere pag. 33).
Sono possibili due tipi di funzionamento.
1 Utilizzo dei pulsanti ad azione unica: sono necessari due ingressi logici oltre al o ai sensi di marcia.
L'ingresso assegnato al comando "più veloce" consente di aumentare la velocità, mentre l’ingresso assegnato al comando "meno veloce"
diminuisce la velocità.
2 Utilizzo dei pulsanti doppia azione: è necessario un solo ingresso logico assegnato a "più veloce".
Più veloce / meno veloce con tasti doppia azione:
Descrizione: 1 tasto a doppia pressione per ogni senso di rotazione. Ogni pressione del tasto chiude un contatto.
Rilasciato (meno
veloce)
1a pressione
(velocità mantenuta)
2a pressione
(più veloce)
tasto marcia avanti
–
a
aeb
tasto marcia indietro
–
c
ced
Esempio di cablaggio:
LI1: marcia avanti
LIx: marcia indietro
LIy: più veloce
Frequenza motore
LSP
0
LSP
Avanti
2a pressione
1a pressione
0
b
a
a
b
a
a
a
a
a
Indietro
2a pressione
1a pressione
0
d
c
c
Questo tipo di funzione più veloce/meno veloce è incompatibile con il comando 3 fili.
In entrambi i casi di utilizzo la velocità massima è data da HSP (vedere pag. 16).
Nota:
La commutazione del riferimento tramite rFC (vedere pag. 34) di un canale di riferimento qualsiasi nel canale di riferimento abbinato alla
funzione "Più veloce / Meno veloce" è accompagnata dalla copia del valore di rFr (frequenza motore). Questo consente di evitare un
indesiderato ritorno a zero della velocità al momento della commutazione.
47
Menu Funzioni applicazioni FUn-
FUnCodice
Descrizione
UPd-
USP
dSP
Str
Gamma di
Preregolazione
regolazione
di base
Più veloce / Meno veloce (potenziometro motorizzato)
Funzione accessibile solo se è selezionato LAC = L2 o L3 e UPdH o UPdt (vedere
pag. 33).
Più veloce
nO
Accessibile solo per UPdt.
La scelta dell’ingresso logico configurato convalida la funzione.
nO: Non configurata
LI1: Ingresso logico LI1
LI2: Ingresso logico LI2
LI3: Ingresso logico LI3
LI4: Ingresso logico LI4
LI5: Ingresso logico LI5
LI6: Ingresso logico LI6
Meno veloce
nO
Accessibile solo per UPdt.
La scelta dell’ingresso logico configurato convalida la funzione.
nO: Non configurata
LI1: Ingresso logico LI1
LI2: Ingresso logico LI2
LI3: Ingresso logico LI3
LI4: Ingresso logico LI4
LI5: Ingresso logico LI5
LI6: Ingresso logico LI6
Memorizzazione valore
nO
Associato alla funzione "più veloce / meno veloce", questo parametro permette di
memorizzare il riferimento:
• quando gli ordini di marcia scompaiono (salvataggio nella RAM)
• quando la rete di alimentazione o gli ordini di marcia scompaiono (salvataggio nella
EEPROM).
All’avviamento seguente il valore di riferimento della velocità sarà l’ultimo valore di
riferimento memorizzato.
nO: nessuna memorizzazione
rAN: memorizzazione nella RAM
EEP: memorizzazione nella EEPROM
Parametri visualizzati solo se la funzione è stata validata.
48
Menu Funzioni applicazioni FUnRegolatore PI
Sinottico
La funzione è attivata dall’assegnazione di un ingresso analogico al ritorno PI (misura).
Riferim.PI
interno
Pr2
Pr4
PII
Riferim. A
pagine 28 e 30
PIF
Ritorno
PI
PIC
Inversione
segnale
Soglia errore
di riavviamento
(risveglio)
tLS
rFC
Rampe
.H0
H.H
Guadagni PI
Valori di riferimento
PI preselezionati
PIF
Legenda:
FbS
Parametro:
Il rettangolo nero
rappresenta la
configurazione in
preregolazione di base
Riferimento B
Pagine 28 e 30
Ritorno PI:
Il ritorno PI deve essere assegnato ad uno degli ingressi analogici AI1, AI2 o AI3.
Riferimento PI:
Il riferimento PI può essere assegnato ai parametri seguenti con ordine di priorità:
- Riferimenti preselezionati tramite ingressi logici (rP2, rP3, rP4)
- Riferimento interno (rPI)
- Riferimento Fr1 (vedere pag. 33)
Tabella di combinazione dei riferimenti PI preselezionati
LI (Pr4)
LI (Pr2)
0
0
1
1
0
1
0
1
Pr2 = nO
Riferimento
rPI o Fr1
rPI o Fr1
rP2
rP3
rP4
Parametri accessibili nel menu regolazione SEt-:
• riferimento interno (rPI)
• riferimenti preselezionati (rP2, rP3, rP4)
• guadagno proporzionale del regolatore (rPG)
• guadagno integrale del regolatore (rIG)
• Parametro FbS:
Il parametro FbS permette di adattare il valore del ritorno PI al riferimento PI (adattamento calibro trasduttore)
Es.: Regolazione della pressione
Valore PI (processo) 0-5 Bar (0-100 %)
Calibro del trasduttore di pressione 0-10 bar
FbS = max scala trasduttore / max processo
FbS = 10/5= 2
• Parametro rSL:
Permette di fissare la soglia di errore PI oltre alla quale viene riattivato il regolatore PI (risveglio), in seguito ad un arresto provocato dal
superamento della soglia di tempo max alla piccola velocità tLS.
• Inversione del senso di correzione (PIC): se PIC = nO, la velocità del motore aumenta quando l'errore è positivo, esempio: regolazione
della pressione con compressore. Se PIC = YES, la velocità del motore scende quando l’errore è positivo, esempio: regolazione della
temperatura con ventilatore di raffreddamento.
49
Menu Funzioni applicazioni FUnMarcia "Manuale - Automatica" con PI.
Questa funzione associa il regolatore PI e la commutazione del riferimento rFC (pagina 34). In base allo stato dell’ingresso logico
il riferimento velocità è dato da Fr2 o dalla funzione PI.
Messa in servizio del regolatore PI
1 Configurazione in modo PI
Vedere sinottico pagina 49.
2 Fare una prova in preregolazione di base (nella maggior parte dei casi questa è adatta).
Per ottimizzare le prestazioni regolare rPG o rIG passo a passo e indipendentemente osservando l'effetto sul ritorno PI rispetto al
riferimento PI.
3 Se le preregolazioni di base sono instabili o il riferimento PI non rispettato.
Fare una prova con un riferimento di velocità in modo Manuale (senza regolatore PI) e a carico per la gamma di velocità del sistema:
- in regime stabilito la velocità deve essere stabile e conforme al valore di riferimento PI, il segnale di ritorno PI deve essere stabile.
- in regime transitorio la velocità deve seguire la rampa e stabilizzarsi rapidamente mentre il ritorno PI deve seguire la velocità.
Altrimenti vedere le regolazioni del controllo e/o il segnale del trasduttore e il cablaggio.
Posizionarsi in modo PI
Impostare brA su no (nessun adattamento di rampa)
Regolare le rampe di velocità (ACC, dEC) al minimo consentito dalla meccanica e senza provocare un difetto ObF.
Regolare il guadagno integrale (rIG) al minimo
Osservare il ritorno PI e il valore impostato
Fare una serie di marcia arresto o di variazione rapida di carico o di riferimento PI.
Regolare il guadagno proporzionale (rPG) in modo da trovare il miglior compromesso tra tempo di risposta e stabilità nelle fasi transitorie
(superamento ridotto riferimento PI e da 1 a 2 oscillazioni prima della stabilità).
Se il riferimento non viene rispettato a regime stabilito aumentare progressivamente il guadagno integrale (rIG), ridurre il guadagno
proporzionale (rPG) in caso di instabilità (pompaggio), trovare il compromesso tra tempo di risposta e precisione statica (Vedere
diagramma).
Fare delle prove su tutta la gamma di regolazione.
Tempo di stabilizzazione
Grandezza
regolata
Riferim PI
rPG alto
Superamento
riferimento PI
Errore statico
Guadagno
proporzionale
rPG basso
Tempo di salita
tempo
rIG alto
Riferimento PI
Guadagno
integrale
rIG basso
tempo
Riferimento PI
rPG e rIG corretti
tempo
La frequenza delle oscillazioni dipende dalla cinematica del sistema.
Superamento
Tempo di
Parametro
Tempo di salita
Errore statico
riferimento PI stabilizzazione
rPG
=
rIG
50
Menu Funzioni applicazioni FUn-
FUnCodice
Descrizione
PIPIF
rPG
rIG
FbS
PIC
Pr2
Gamma di
regolazione
Regolatore PI
Ritorno regolatore PI
nO: Non configurata
AI1: Ingresso analogico AI1
AI2: Ingresso analogico AI2
AI3: Ingresso analogico AI3
Guadagno proporzionale del regolatore PI (1) da 0,01 a 100
Garantisce una buona dinamica nei cambiamenti rapidi del ritorno PI.
Guadagno integrale del regolatore PI (1)
da 0,01 a 100
Garantisce precisione statica nei cambiamenti lenti del ritorno PI.
Coefficiente moltiplicatore del ritorno PI (1)
da 0,1 a 100
Per adattamento segnale di ritorno PI.
Inversione del senso di correzione del regolatore PI (1)
nO: normale
YES: inverso
2 riferimenti PI preselezionati
La scelta dell’ingresso logico configurato convalida la funzione.
nO: Non configurata
LI1: Ingresso logico LI1
LI2: Ingresso logico LI2
LI3: Ingresso logico LI3
LI4: Ingresso logico LI4
LI5: Ingresso logico LI5
LI6: Ingresso logico LI6
Preregolazione
di base
nO
1
1
1
nO
nO
Se LAC = L3, sono possibili le seguenti configurazioni:
Pr4
Cd11: Bit 11 della parola di comando Modbus o CANopen
Cd12: Bit 12 della parola di comando Modbus o CANopen
Cd13: Bit 13 della parola di comando Modbus o CANopen
Cd14: Bit 14 della parola di comando Modbus o CANopen
Cd15: Bit 15 della parola di comando Modbus o CANopen
4 riferimenti PI preselezionati
La scelta dell’ingresso logico configurato convalida la funzione.
Accertarsi che Pr2 sia stato configurato prima di configurare Pr4.
nO
nO: Non configurata
LI1: Ingresso logico LI1
LI2: Ingresso logico LI2
LI3: Ingresso logico LI3
LI4: Ingresso logico LI4
LI5: Ingresso logico LI5
LI6: Ingresso logico LI6
Se LAC = L3, sono possibili le seguenti configurazioni:
rP2
rP3
rP4
Cd11: Bit 11 della parola di comando Modbus o CANopen
Cd12: Bit 12 della parola di comando Modbus o CANopen
Cd13: Bit 13 della parola di comando Modbus o CANopen
Cd14: Bit 14 della parola di comando Modbus o CANopen
Cd15: Bit 15 della parola di comando Modbus o CANopen
2o valore PI preselezionato (1)
da 0 a 100 %
30 %
Viene visualizzato solo se Pr2 è stato validato dalla scelta di un ingresso.
3o valore PI preselezionato (1)
da 0 a 100 %
60 %
Viene visualizzato solo se Pr4 è stato validato dalla scelta di un ingresso.
4o valore PI preselezionato (1)
da 0 a 100 %
90 %
Viene visualizzato solo se Pr4 è stato validato dalla scelta di un ingresso.
(1) Parametro accessibile anche nel menu regolazione SEt-.
Parametri visualizzati solo se la funzione è stata validata.
51
Menu Funzioni applicazioni FUn-
FUnCodice
PI(segue)
Descrizione
rSL
PII
rPI
Preregolazione
di base
0
Soglia errore di riavviamento (soglia di
"risveglio")
Nel caso in cui le funzioni "PI" e "Tempo di funzionamento a piccola velocità " tLS (vedere
pag. 18) siano configurate contemporaneamente può accadere che il regolatore PI cerchi
di regolare ad una velocità inferiore a LSP.
Ne deriva un funzionamento insoddisfacente che consiste nell’avviare, passare a LSP
quindi fermarsi e così via…
Il parametro rSL (soglia errore di riavviamento) permette di regolare una soglia di errore PI
minima per riavviare in seguito ad un arresto prolungato su LSP.
La funzione non è attiva se tLS = 0.
Riferimento PI interno
nO
nO: Il valore di riferimento del regolatore PI è Fr1, tranne UPdH e UPdt (Più veloce / meno
veloce non può essere utilizzato come valore del riferimento PI).
YES: Il valore di set up del regolatore PI è interno, impostato tramite il parametro rPI.
Valore riferimento interno del regolatore PI (1) da 0 a 100 %
0
(1) Parametro accessibile anche nel menu regolazione SEt-.
Parametri visualizzati solo se la funzione è stata validata.
52
Gamma di
regolazione
da 0 a 100 %
Menu Funzioni applicazioni FUnComando freno
Funzione accessibile solo se LAC = L2 o L3 (pagina 28).
Questa funzione, assegnabile al relè R2 o all’uscita logica AOC, permette la gestione di un freno elettromagnetico tramite variatore.
Principio:
Sincronizzare l’apertura del freno con lo stabilirsi della coppia all’avviamento e alla chiusura del freno a velocità zero a motore fermo, per
eliminare gli sbalzi.
Logica freno
Velocità motore
Riferimento
velocità
t
0
Relè R2 o uscita logica AOC 1
t
0
Corrente motore
brt
Ibr
t
0
Frequenza motore
bEt
Riferimento velocità
brL
bEn
0
t
LI avanti o indietro
1
t
0
Stato freno
bloccato (chiuso)
sbloccato (aperto)
bloccato
Regolazioni accessibili nel menu FUn-:
- frequenza di apertura freno (brL)
- corrente di apertura freno (Ibr)
- temporizzazione di apertura freno (brt)
- frequenza di chiusura freno (bEn)
- temporizzazione di chiusura freno (bEt)
- impulso di apertura freno (bIP)
Consigli di regolazione del comando freno:
1 Frequenza di apertura freno:
- movimento orizzontale: regolare a 0.
- movimento verticale: regolare ad una frequenza pari allo scorrimento nominale del motore in Hz.
2 Corrente di apertura freno (Ibr):
- movimento orizzontale: regolare a 0.
- movimento verticale: preregolare alla corrente nominale motore quindi regolare in modo preciso per eliminare gli sbalzi all’avviamento
accertandosi che il carico massimo resti bloccato al momento dell’apertura del freno.
3 Temporizzazione di apertura freno (brt):
Tempo necessario al freno meccanico per aprirsi, da regolare in funzione del tipo di freno.
4 Frequenza di chiusura del freno (bEn):
- movimento orizzontale: regolare a 0.
- movimento verticale: regolare ad una frequenza pari allo scorrimento nominale del motore in Hz. Attenzione, bEn max = LSP,
occorre quindi regolare precedentemente LSP ad un valore adatto.
5 Temporizzazione di chiusura del freno (bEt):
Tempo necessario al freno meccanico per chiudersi, da regolare in funzione del tipo di freno.
6 Impulso di apertura freno:
- movimento orizzontale: regolare a nO.
- movimento verticale: regolare a YES, e verificare che il senso della coppia motore in comando "Marcia avanti" corrisponda al senso di
salita del carico. Se necessario invertire le due fasi del motore. Questo parametro provoca una coppia motore nel senso della salita
qualunque sia le senso di marcia comandato, per tenere il carico durante l’apertura del freno.
53
Menu Funzioni applicazioni FUn-
FUnCodice
Descrizione
bLCbLC
brL
Ibr
brt
LSP
bEn
bEt
bIP
Gamma di
regolazione
Comando freno
Funzione accessibile solo se LAC = L2 o L3 (pagina 28).
Configurazione comando freno
nO
nO: Non configurata
r2: Relè R2
dO: uscita logica AOC
Se bLC è configurato, i parametri FLr (pagina 61) e brA (pagina 38) sono forzati a nO ed
il parametro OPL (pagina 61) è forzato a YES
Frequenza di apertura freno
da 0.0 a 10.0 Hz in base al calibro
variatore
Soglia di corrente motore per apertura freno
da 0 a 1,36 In (1) in base al calibro
variatore
Tempo di apertura freno
da 0 a 5 s
0,5 s
0
Piccola velocità
da 0 a HSP
(pagina 16)
Frequenza motore a riferimento al minimo.
Questo parametro è ugualmente modificabile ne menu Set- (pagina 16)
Soglia di frequenza chiusura freno
nO - da 0 a LSP
nO
nO: Non configurata
0 a LSP: campo di regolazione in Hz
Se bLC è configurato e bEn è configurato a n0, il variatore si bloccherà in difetto bLF al
primo ordine di marcia
Tempo di chiusura freno
da 0 a 5 s
0,5 s
Impulso di apertura freno
nO
nO: La coppia motore durante l’apertura del freno è nel senso di rotazione comandato.
YES: La coppia motore durante l’apertura del freno è sempre nel senso avanti,
qualunque sia il senso di marcia comandato.
Verificare che il senso della coppia motore in comando "Marcia avanti"
corrisponda al senso di salita del carico. Invertire se necessario due fasi del
motore.
(1) In corrisponde alla corrente nominale variatore indicata nella guida all’installazione e sulla targhetta del variatore.
Parametri visualizzati solo se la funzione è stata validata.
54
Preregolazione
di base
Menu Funzioni applicazioni FUn-
FUnCodice
Descrizione
LC2LC2
Gamma di
regolazione
Commutazione 2a limitazione di corrente
Funzione accessibile solo se LAC = L2 o L3 (pagina 28).
Commutazione 2a limitazione di corrente
La scelta dell’ingresso logico configurato convalida la funzione.
nO: Non configurata
LI1: Ingresso logico LI1
LI2: Ingresso logico LI2
LI3: Ingresso logico LI3
LI4: Ingresso logico LI4
LI5: Ingresso logico LI5
LI6: Ingresso logico LI6
Preregolazione
di base
nO
Se LAC = L3, sono possibili le seguenti configurazioni:
Cd11: Bit 11 della parola di comando Modbus o CANopen
Cd12: Bit 12 della parola di comando Modbus o CANopen
Cd13: Bit 13 della parola di comando Modbus o CANopen
Cd14: Bit 14 della parola di comando Modbus o CANopen
Cd15: Bit 15 della parola di comando Modbus o CANopen
CL2
Allo stato 0 dell’ingresso logico o del bit della parola di comando, CL1 è validato (Menu SEt
pagina 18).
Allo stato 1 dell’ingresso logico o del bit della parola di comando, CL2 è validato.
2a limitazione di corrente (1)
da 0,25 a 1,5 In (2) 1,5 In (2)
(1) Parametro accessibile anche nel menu regolazione SEt-.
(2) In corrisponde alla corrente nominale variatore indicata nella guida all’installazione e sulla targhetta del variatore.
Parametri visualizzati solo se la funzione è stata validata.
55
Menu Funzioni applicazioni FUn-
FUnCodice
Descrizione
CHPCHP
Gamma di
regolazione
Commutazione motori
Funzione accessibile solo se LAC = L2 o L3 (pagina 28).
Commutazione motore 2
nO: Non configurata
LI1: Ingresso logico LI1
LI2: Ingresso logico LI2
LI3: Ingresso logico LI3
LI4: Ingresso logico LI4
LI5: Ingresso logico LI5
LI6: Ingresso logico LI6
Preregolazione
di base
nO
Se LAC = L3, sono possibili le seguenti configurazioni:
Cd11: Bit 11 della parola di comando Modbus o CANopen
Cd12: Bit 12 della parola di comando Modbus o CANopen
Cd13: Bit 13 della parola di comando Modbus o CANopen
Cd14: Bit 14 della parola di comando Modbus o CANopen
Cd15: Bit 15 della parola di comando Modbus o CANopen
LI o bit = 0: motore 1
LI o bit = 1: motore 2
- La funzione commutazione motori disattiva la protezione termica del motore.
Questa deve quindi essere effettuata indipendentemente dal variatore.
- Se si utilizza questa funzione, non utilizzare la funzione autotuning tUn (pagina
21) sul motore 2 e non configurare tUn = rUn o POn.
- I cambiamenti di parametri vengono acquisiti solo se il variatore è bloccato.
UnS2
FrS2
Tensione nominale motore 2 indicata sulla
targhetta
ATV31ppppM2: da 100 a 240 V
ATV31ppppM3X: da 100 a 240 V
ATV31ppppN4: da 100 a 500 V
ATV31ppppS6X: da 100 a 600 V
Frequenza nominale motore 2 indicata sulla
targhetta
Il rapporto
nCr2
nSP2
UnS (in volt)
FrS (in Hz)
in base al calibro
variatore
in base al calibro
variatore
da 10 a 500 Hz
50 Hz
non deve superare i seguenti valori
ATV31ppppM2: 7 max
ATV31ppppM3X: 7 max
ATV31ppppN4: 14 max
ATV31ppppS6X: 17 max
La preregolazione di base è 50 Hz, sostituita da una preregolazione di 60 Hz se bFr è a 60 Hz.
Corrente nominale motore 2 indicata sulla
da 0,25 a 1,5 In (2) in base al calibro
targhetta
variatore
Velocità nominale motore 2 indicata sulla
da 0 a 32760 RPM in base al calibro
targhetta
variatore
da 0 a 9999 RPM quindi da 10.00 a 32.76 KiloRPM
Se la targhetta non riporta la velocità nominale ma la velocità di sincronismo e lo
scorrimento in Hz o in %, calcolare la velocità nominale come segue:
100 - scorrimento in %
• velocità nominale = velocità di sincronismo x
100
o
50 - scorrimento in Hz
• velocità nominale = velocità di sincronismo x
(motori 50 Hz)
50
o
60 - scorrimento in Hz
• velocità nominale = velocità di sincronismo x
(motori 60 Hz)
60
(1) Parametro accessibile anche nel menu regolazione SEt-.
(2) In corrisponde alla corrente nominale variatore indicata nella guida all’installazione e sulla targhetta del variatore.
Parametri visualizzati solo se la funzione è stata validata.
56
Menu Funzioni applicazioni FUn-
FUnCodice
CHP(segue)
Descrizione
Gamma di
regolazione
da 0,5 a 1
Preregolazione
di base
in base al calibro
variatore
n
COS2
Cos Phi motore 2 indicato sulla targhetta
UFt2
Scelta del tipo di legge tensione / frequenza
motore 2
L: Coppia costante per motori in parallelo o motori speciali
P: Coppia variabile: applicazioni pompe e ventilatori
n: Controllo vettoriale del flusso senza rilevatore per applicazioni a coppia costante
nLd: Risparmio energetico per applicazioni a coppia variabile senza bisogno di dinamica
Importante (comportamento vicino alla legge P a vuoto e alla legge n in carico)
Tensione
UnS
L
n
P
Frequenza
FrS
UFr2
FLG2
Compensazione RI/Boost di tensione motore 2 (1) da 0 a 100 %
20
Per UFt2= n o nLd: Compensazione RI. Per UFt2 = L o P : Boost di tensione
Permette di ottimizzare la coppia a bassissima velocità (aumentare UFr2 se la coppia è
insufficiente).
Accertarsi che il valore di UFr2 non sia troppo alto a motore caldo (rischio d'instabilità). Se
si modifica UFt2, UFr2 torna alla preregolazione di base (20%).
Guadagno anello frequenza motore 2 (1)
da 1 a 100 %
20
Parametro accessibile solo se UFt2= n o nLd.
Il parametro FLG2 regola la rampa di velocità in funzione dell’inerzia della macchina comandata.
Un eccesso di guadagno può provocare un’instabilità di funzionamento.
FLG2
Hz
50
50
50
40
40
40
30
30
20
20
10
10
10
0
0
In questo caso
aumentare FLG2
20
-10
0
0,1
0,2
0,3
0,4
0,5
t
-10
In questo caso
ridurre FLG2
0
0
0,1
0,2
0,3
0,4
0,5
t
-10
0
0,1
0,2
0,3
0,4
0,5
t
Stabilità dell’anello frequenza motore 2 (1)
da 1 a 100 %
20
Parametro accessibile solo se UFt2= n o nLd.
Permette di regolare il raggiungimento del regime stabilito in seguito ad un transitorio di velocità
(accelerazione o decelerazione) in funzione della cinematica della macchina.
Aumentare progressivamente la stabilità per evitare i superamenti in velocità.
StA2 basso
StA2 corretto
StA2 alto
Hz
Hz
Hz
50
50
50
40
40
40
30
30
20
20
10
10
10
0
0
In questo caso
aumentare StA2
30
20
-10
SLP2
FLG2 alto
Hz
30
StA2
FLG2 corretto
Hz
0
0,1
0,2
0,3
0,4
0,5
t
-10
In questo caso
ridurre StA2
0
0
0,1
0,2
0,3
0,4
0,5
t
-10
0
0,1
0,2
0,3
0,4
0,5
t
Compensazione di scorrimento motore 2 (1)
da 0 a 150 %
100
Parametro accessibile solo se UFt2= n o nLd.
Permette di regolare la compensazione di scorrimento vicino al valore fissato dalla velocità
nominale motore.
Le velocità indicate sulle targhette motore non sono obbligatoriamente esatte.
• Se lo scorrimento regolato è < scorrimento reale: il motore non gira alla velocità corretta
in regime stabilito.
• Se lo scorrimento regolato è > scorrimento reale: il motore è sovracompensato e la
velocità è instabile.
(1) Parametro accessibile anche nel menu regolazione SEt-.
Parametri visualizzati solo se la funzione è stata validata.
57
Menu Funzioni applicazioni FUnGestione finecorsa
Funzione accessibile solo se LAC = L2 o L3 (pagina 28).
Questa funzione permette di gestire l’azione di uno o due finecorsa (1 o 2 sensi di marcia):
- configurazione di uno o due ingressi logici (limitazione avanti, limitazione indietro)
- scelta del tipo di arresto (su rampa, rapido, o a ruota libera).
In seguito all’arresto è consentito solo il riavviamento nell’altro senso.
- L'arresto avviene con ingresso allo stato 0, il senso di marcia è autorizzato a 1.
FUnCodice
Descrizione
LStLAF
LAr
LAS
Gamma di
regolazione
Gestione finecorsa
Funzione accessibile solo se LAC = L2 o L3 (pagina 28).
Limitazione marcia avanti
nO: Non configurata
LI1: Ingresso logico LI1
LI2: Ingresso logico LI2
LI3: Ingresso logico LI3
LI4: Ingresso logico LI4
LI5: Ingresso logico LI5
LI6: Ingresso logico LI6
Limitazione marcia indietro
nO: Non configurata
LI1: Ingresso logico LI1
LI2: Ingresso logico LI2
LI3: Ingresso logico LI3
LI4: Ingresso logico LI4
LI5: Ingresso logico LI5
LI6: Ingresso logico LI6
Tipo di arresto a finecorsa
rNP: Su rampa
FSt: Arresto rapido
nSt: Arresto ruota libera
.
Parametri visualizzati solo se la funzione è stata validata tramite selezione di un ingresso logico.
58
Preregolazione
di base
nO
nO
nSt
Menu Funzioni applicazioni FUn-
FUnSCS
FCS
Salvataggio della configurazione (1)
nO
nO: Funzione non attiva
StrI: Effettua un salvataggio della configurazione in corso (tranne il risultato
dell’autotuning) in memoria EEPROM. SCS torna automaticamente a nO effettuato il
salvataggio. Questa funzione permette di conservare una configurazione di riserva oltre alla
configurazione in corso.
Nei variatori usciti dalla fabbrica la configurazione in corso e la configurazione in memoria
sono inizializzate alla configurazione di base.
• Se il terminale remotato opzionale è collegato al variatore, saranno disponibili anche le
scelte seguenti: FIL1, FIL2, FIL3, FIL4 (file disponibili nella memoria
EEPROM del terminale remotato per salvare la configurazione in corso). Permettono di
registrare da 1 a 4 configurazioni diverse, che potranno in tal modo essere conservate o
trasferite su altri variatori dello stesso calibro.
SCS torna automaticamente a nO effettuato il salvataggio.
Ritorno alla preregolazione di base / Richiamo
nO
configurazione (1)
nO: Funzione non attiva
rECI: La configurazione in corso diventa identica alla configurazione salvata
precedentemente con SCS = StrI. rECI viene visualizzato solo se è stato effettuato un
salvataggio. FCS torna automaticamente a nO terminata questa operazione.
InI: La configurazione in corso diventa identica alla preregolazione di base. FCS torna
automaticamente a nO terminata questa operazione.
• Se il terminale remotato opzionale è collegato al variatore, saranno disponibili anche le
scelte seguenti, a condizione che i file corrispondenti della memoria EEPROM del
terminale remotato siano stati caricati (da 0 a 4 file): FIL1, FIL2, FIL3, FIL4 .
Permettono di sostituire la configurazione in corso con una della quattro configurazioni che
il terminale remotato può contenere.
FCS torna automaticamente a nO ad azione effettuata.
Attenzione: Se il messaggio nAd appare per un breve istante prima del passaggio a nO,
significa che il trasferimento di configurazione non è possibile e che non è stato effettuato
(calibri variatori diversi ad esempio). Se il messaggio ntr appare per un breve istante
prima del passaggio a nO, significa che si è verificato un errore di trasferimento della
configurazione; in tal caso è necessario effettuare una preregolazione di base con InI.
In entrambi i casi verificare la configurazione da trasferire prima di ritentare.
Per essere acquisiti, rECI, InI e FL1 a FL4 richiedono una pressione prolungata (2 s)
del tasto ENT.
(1) SCS e FCS sono accessibili da diversi menu di configurazione, ma riguardano l’insieme di tutti i menu e parametri
59
Menu Difetti FLt-
ENT
FLt-
ESC
Atr
ESC
Riavviamento automatico
ENT
ESC
ESC
rPr
ESC
Reset del tempo di funzionamento
ENT
I parametri possono essere modificati solo a motore fermo, senza ordine di marcia.
Sul terminale remotato opzionale questo menu è accessibile con commutatore in posizione
.
FLtCodice
Descrizione
Preregolazione
di base
nO
Atr
Riavviamento automatico
nO: Funzione non attiva
YES: Riavviamento automatico, in seguito a blocco su difetto, se questo è stato eliminato e se le altre
condizioni di funzionamento lo consentono. Il riavviamento si effettua con una serie di tentativi automatici
effettuati ad intervalli di tempo crescenti: 1 s, 5 s, 10 s, quindi 1 mn per i successivi.
Se l’avviamento non avviene al termine del tempo configurabile tAr, la procedura viene abbandonata e il
variatore resta bloccato fino alla messa fuori tensione e successiva rimessa in tensione.
I difetti che autorizzano questa funzione sono i seguenti:
Difetto esterno (EPF)
Interruzione 4-20 mA (LFF)
Difetto CANopen (COF)
Sovratensione rete (OSF),
Interruzione di una fase rete (PHF),
Interruzione di una fase motore (OPF),
Sovratensione bus DC (ObF),
Sovraccarico motore (OLF),
Collegamento seriale (SLF),
Surriscaldamento variatore (OHF).
Il relè di difetto del variatore resta quindi sganciato se la funzione è attiva. Il valore di riferimento della
velocità e il senso di marcia devono restare fissi.
Utilizzare il comando 2 fili (tCC = 2C) con tCt = LEL o PFO (pagina 23).
tAr
Durata massima del processo di riavviamento
5
5: 5 minuti
10: 10 minuti
30: 30 minuti
1h: 1 ora
2h: 2 ore
3h: 3 ore
Ct: Illimitato
Questo parametro viene visualizzato se Atr = YES. Permette di limitare il numero di riavviamenti consecutivi
in caso di difetto ricorrente.
Riarmo del difetto in corso
no
nO: Non configurata
LI1: Ingresso logico LI1
LI2: Ingresso logico LI2
LI3: Ingresso logico LI3
LI4: Ingresso logico LI4
LI5: Ingresso logico LI5
LI6: Ingresso logico LI6
Accertarsi che il riavviamento intempestivo non presenti pericoli per persone o cose.
rSF
Parametri visualizzati solo se la funzione è stata validata.
60
Menu Difetti FLt-
FLtCodice
FLr
EtF
Descrizione
Preregolazione
di base
Ripresa al volo (ripresa automatica di rampa)
nO
Permette la validazione di un riavviamento senza sbalzi se l’ordine di marcia è mantenuto dopo i seguenti
eventi:
- interruzione rete o semplice messa fuori tensione.
- riarmo del difetto in corso o riavviamento automatico.
- arresto ruota libera.
La velocità data dal variatore riparte dalla velocità stimata del motore al momento della ripresa e segue
quindi la rampa fino al valore di riferimento impostato.
Questa funzione richiede il comando 2 fili (tCC = 2C) con tCt = LEL o PFO.
nO: Funzione non attiva
YES: Funzione attiva
Quando la funzione è attiva interviene ad ogni ordine di marcia, provocando un leggero ritardo
(1 secondo max).
FLr è forzato a nO se è configurato il comando freno bLC (pagina 54).
Difetto esterno
nO
nO: Non configurata
LI1: Ingresso logico LI1
LI2: Ingresso logico LI2
LI3: Ingresso logico LI3
LI4: Ingresso logico LI4
LI5: Ingresso logico LI5
LI6: Ingresso logico LI6
Se LAC = L3, sono possibili le seguenti configurazioni:
EPL
OPL
IPL
OHL
OLL
Cd11: Bit 11 della parola di comando Modbus o CANopen
Cd12: Bit 12 della parola di comando Modbus o CANopen
Cd13: Bit 13 della parola di comando Modbus o CANopen
Cd14: Bit 14 della parola di comando Modbus o CANopen
Cd15: Bit 15 della parola di comando Modbus o CANopen
Modo di arresto su difetto esterno EPF
YES
nO: Difetto ignorato
YES: Difetto con arresto ruota libera
rNP: Difetto con arresto su rampa
FSt: Difetto con arresto rapido
Configurazione del difetto interruzione fase motore
YES
nO: Funzione non attiva
YES: Sgancio su difetto OPF
OAC: Nessuno sgancio su difetto, ma gestione della tensione di uscita per evitare una sovracorrente al
ripristino del collegamento con il motore e ripresa al volo anche se FLr = nO. Utilizzare con contattore a valle.
OPL è forzato a YES se il comando del freno bLC è configurato (pagina 54)
Configurazione del difetto perdita fase rete
YES
Questo parametro è accessibile solo sui variatori trifase.
nO: Difetto ignorato
YES: Difetto con arresto rapido
Modo di arresto su difetto surriscaldamento variatore OHF
YES
nO: Difetto ignorato
YES: Difetto con arresto ruota libera
rNP: Difetto con arresto su rampa
FSt: Difetto con arresto rapido
Modo di arresto su difetto sovraccarico motore OLF
YES
nO: Difetto ignorato
YES: Difetto con arresto ruota libera
rNP: Difetto con arresto su rampa
FSt: Difetto con arresto rapido
61
Menu Difetti FLt-
FLtCodice
SLL
COL
tnL
LFL
LFF
drn
StP
InH
Descrizione
Gamma di
regolazione
Preregolazione
di base
YES
Modo di arresto su difetto collegamento seriale Modbus SLF
nO: Difetto ignorato
YES: Difetto con arresto ruota libera
rNP: Difetto con arresto su rampa
FSt: Difetto con arresto rapido
Modo di arresto su difetto collegamento seriale CANopen COF
YES
nO: Difetto ignorato
YES: Difetto con arresto ruota libera
rNP: Difetto con arresto su rampa
FSt: Difetto con arresto rapido
Configurazione del difetto autotuning tnF
YES
nO: Difetto ignorato (il variatore prende i valori della preregolazione di base)
YES: Difetto con variatore bloccato.
Modo di arresto su difetto interruzione segnale 4 - 20 mA LFF
nO
nO: Difetto ignorato (solo valore possibile se CrL3 y 3 mA, vedere pag. 24)
YES: Difetto con arresto ruota libera
LFF: Il variatore passa alla velocità di ripristino (parametro LFF)
rLS: Il variatore mantiene la velocità che aveva al momento del difetto, fino alla scomparsa del difetto.
rNP: Difetto con arresto su rampa
FSt: Difetto con arresto rapido
Prima di configurare LFL a YES , rNP o FSt, verificare il collegamento dell’ingresso AI3 altrimenti il
variatore rischia di segnalare immediatamente un difetto LFF.
Velocità di ripristino per LFL
da 0 a 500 Hz
10 Hz
Regolazione della velocità di ripristino per arresto su difetto.
Marcia degradata in caso di sottotensione
nO
nO: Funzione non attiva
YES: La soglia di controllo della tensione di rete è:
ATV31ppppM2: 130 V
ATV31ppppM3X: 130 V
ATV31ppppN4: 270 V
ATV31ppppS6X: 340 V
In questo caso è obbligatorio utilizzare un’induttanza di linea e le prestazioni del variatore non sono più
garantite.
La configurazione di questa funzione richiede la pressione prolungata di 2 secondi del tasto "ENT".
Arresto controllato su interruzione di rete
nO
nO: Blocco del variatore e arresto del motore a "ruota libera"
NNS: Questo modo di arresto utilizza l’inerzia per mantenere il più a lungo possibile l’alimentazione del
variatore.
rMP: Arresto su rampa (dEC O dE2)
FSt: Arresto rapido, il tempo di arresto dipende dall’inerzia e dalle possibilità di frenatura del variatore.
Inibizione dei difetti
nO
L'inibizione dei difetti può provocare la distruzione del variatore. In questo caso, la garanzia non è più
valida.
nO: Non configurata
LI1: Ingresso logico LI1
LI2: Ingresso logico LI2
LI3: Ingresso logico LI3
LI4: Ingresso logico LI4
LI5: Ingresso logico LI5
LI6: Ingresso logico LI6
rPr
62
Allo stato 0 dell’ingresso, la funzione di controllo dei difetti è attiva,
Allo stato 1 dell’ingresso, la funzione di controllo dei difetti non è attiva.
Su fronte di salita (passaggio da 0 a1) dell’ingresso, i difetti in corso vengono riarmati.
La configurazione di questa funzione richiede la pressione prolungata di 2 secondi del tasto "ENT".
Reset del tempo di funzionamento
nO
nO: No
rtH: Reset del tempo di funzionamento
Il parametro rPr torna automaticamente a nO non appena viene effettuato il reset.
Menu Comunicazione COM-
ENT
CON-
ESC
Add
ESC
ENT
ESC
ESC
FLOC
ESC
ENT
I parametri possono essere modificati solo a motore fermo, senza ordine di marcia. Le modifiche dei parametri Add, tbr, tFO,
AdCO e bdCO verranno prese in conto dopo una messa fuori tensione con successiva messa in tensione.
Sul terminale remotato opzionale questo menu è accessibile con commutatore in posizione
.
CONCodice
Add
tbr
tFO
ttO
AdCO
bdCO
ErCO
FLO
FLOC
Descrizione
Gamma di
regolazione
da 1 a 247
Preregolazione
di base
1
19200
Modbus: indirizzo del variatore
Modbus: velocità de trasmissione
4.8: 4800 bit/secondo
9.6: 9600 bit/secondo
19.2: 19200 bit/secondo (Attenzione, solo questo valore permette l’utilizzo del terminale deportato)
Formato di comunicazione Modbus
8E1
8O1: 8 bit di dati, parità dispari, 1 bit di stop
8E1: 8 bit di dati, parità pari, 1 bit di stop (Attenzione, solo questo valore permette l’utilizzo del terminale
deportato)
8n1: 8 bit di dati, senza parità, 1 bit di stop
8n2: 8 bit di dati, senza parità, 2 bit di stop
Modbus: time-out
da 0,1 a 10 s
10 s
CANopen: indirizzo del variatore
da 0 a 127
0
CANopen: velocità di trasmissione
125
10.0: 10 kilobit/secondo
20.0: 20 kilobit/secondo
50.0: 50 kilobit/secondo
125.0: 125 kilobit/secondo
250.0: 250 kilobit/secondo
500.0: 500 kilobit/secondo
1000: 1000 kilobit/secondo
CANopen: registro errori (solo lettura)
0: "No error"
1: "Bus off error"
2: "Life time error"
3: "CAN overrun"
4: "Heartbeat error"
Forzatura locale
nO
nO: Non configurata
LI1: Ingresso logico LI1
LI2: Ingresso logico LI2
LI3: Ingresso logico LI3
LI4: Ingresso logico LI4
LI5: Ingresso logico LI5
LI6: Ingresso logico LI6
La forzatura locale riporta il controllo del variatore alla morsettiera e al terminale di programmazione.
Scelta del canale di riferimento e comando in forzatura locale
AI1
Accessibile solo se LAC = 3
AIP per
ATV31ppppppA
Il riferimento velocità viene acquisito solo in forzatura locale. Le funzioni PI, ingressi sommatori ecc... non sono attive.
Vedere sinottici pagine 28 a 31.
AI1: Ingresso analogico AI1, ingressi logici LI
AI2: Ingresso analogico AI2, ingressi logici LI
AI3: Ingresso analogico AI3, ingressi logici LI
AIP: Potenziometro (solo variatori tipo A), tasti RUN/STOP
LCC: Terminale remotato: valore LFr pagina 16, tasti RUN/STOP/FWD/REV.
Parametri visualizzati solo se la funzione è stata validata.
63
Menu Visualizzazione SUP-
ENT
SUP-
ESC
LFr
ENT
ESC
ESC
ESC
ESC
LIACPU
ENT
ENT
ESC
ESC
Sotto-menu
ENT
ESC
I parametri sono accessibili sia in marcia che a motore fermo.
Sul terminale remotato opzionale questo menu è accessibile con il commutatore in qualsiasi posizione.
Alcune funzioni comprendono diversi parametri. Per rendere più chiara la programmazione e per evitare un fastidioso scorrimento di
parametri le funzioni vengono raggruppate in sotto-menu.
I sotto-menu sono riconoscibili grazie al trattino posto a destra del codice, come nei menu : LIA- ad esempio.
Quando il variatore è in marcia, il valore visualizzato corrisponde al valore di uno dei parametri di visualizzazione. Di default il valore
visualizzato è la frequenza di uscita applicata al motore (parametro rFr).
Quando viene visualizzato il valore del nuovo parametro di visualizzazione desiderato, occorre tenere premuto per 2 secondi il tasto "ENT"
per validare la modifica del parametro di visualizzazione e memorizzarlo. Da questo momento in poi sarà il valore di questo parametro ad
essere visualizzato in marcia (anche in seguito ad una messa fuori tensione).
Se la nuova scelta non viene confermata da una seconda pressione prolungata del tasto "ENT", si tornerà al parametro precedente la
messa fuori tensione.
64
Menu Visualizzazione SUP-
SUPCodice
LFr
rPI
FrH
rFr
SPd1
o
SPd2
o
SPd3
LCr
Opr
ULn
tHr
tHd
LFt
Otr
rtH
Descrizione
Valore frequenza per il comando mediante
terminale integrato o terminale deportato
Valore interno PI
Valore riferimento impostato (in valore assoluto)
Frequenza di uscita applicata al motore
Gamma di variazione
da 0 a 500 Hz
da 0 a 100 %
da 0 a 500 Hz
- 500 Hz a + 500 Hz
Frequenza di uscita in unità cliente
SPd1 o SPd2 o SPd3 in base al parametro SdS pagina 19 (SPd3 in preregolazione di base).
Corrente nel motore
Potenza motore
100 % = Potenza nominale motore, calcolata in base ai parametri indicati nel menu drC-.
Tensione rete (fornisce la tensione rete misurata su bus DC, con motore a regime o fermo)
Stato termico motore
100 % = Stato termico nominale
118 % = Soglia "OLF" (sovraccarico motore)
Stato termico variatore
100 % = Stato termico nominale
118 % = Soglia "OHF" (surriscaldamento variatore)
Ultimo difetto rilevato
bLF: Difetto comando freno
CFF: Configurazione (parametri) non corretta
CFI: Configurazione (parametri) non valida
COF: Difetto comunicazione linea 2 (CANopen)
CrF: Difetto circuito carica condensatori
EEF: Difetto memoria EEPROM
EPF: Difetto esterno
InF: Difetto interno
LFF: Difetto 4-20 mA su AI3
nOF: Nessun difetto memorizzato
ObF: Difetto sovratensione bus DC
OCF: Difetto sovracorrente
OHF: Difetto surriscaldamento variatore
OLF: Difetto sovraccarico motore
OPF: Difetto interruzione fase motore
OSF: Difetto sovratensione rete
PHF: Difetto perdita fase rete
SCF: Difetto cortocircuito motore (fase, terra)
SLF: Difetto comunicazione Modbus
SOF: Difetto sovravelocità motore
tnF: Difetto autotuning
USF: Difetto sotto-tensione rete
Coppia motore
100 % = coppia nominale motore, calcolata in base ai parametri indicati nel menu drC-.
Tempo di funzionamento
da 0 a 65530 ore
Tempo totale di messa sotto tensione del motore:
da 0 a 9999 (ore), quindi da 10.00 a 65.53 (kiloore).
Può essere azzerato con il parametro rPr del menu FLt (vedere pag. 62).
Parametri visualizzati solo se la funzione è stata validata.
65
Menu Visualizzazione SUP-
SUPCodice
COd
Descrizione
Codice di blocco del terminale
Permette di proteggere la configurazione del variatore con un codice di accesso.
Attenzione: Prima di inserire un codice non dimenticare di annotarlo
tUS
UdP
LIALI1A
LI2A
LI3A
LI4A
LI5A
LI6A
LIS
• 0n: Nessun codice blocca l’accesso.
- Per bloccare l’accesso comporre un codice (da 2 a 9999) servendosi del tasto
per incrementare la cifra visualizzata, quindi premere "ENT". A questo punto viene
visualizzato il messaggio "On" e l’accesso al parametro risulterà bloccato.
• OFF: Un codice blocca l’accesso (da 2 a 9999).
- Per sbloccare l’accesso comporre il codice servendosi del tasto
per
incrementare la cifra visualizzata, quindi premere "ENT". Il codice resta visualizzato e
l’accesso risulta bloccato fino alla messa fuori tensione successiva. Alla rimessa in
tensione successiva l’accesso al parametro risulterà bloccato.
- Se si inserisce un codice non corretto il display visualizza "On" e l’accesso al
parametro resta bloccato
• XXXX: L’accesso al parametro è sbloccato (il codice resta visualizzato).
- Per riattivare il blocco con lo stesso codice, con l’accesso al parametro sbloccato,
tornare a "On" con il tasto
, quindi premere "ENT". "On" resta visualizzato e
l’accesso al parametro è bloccato.
- Per bloccare l’accesso con un nuovo codice, con l’accesso al parametro
sbloccato, comporre il nuovo codice servendosi del tasti
o
quindi premere
"ENT". A display viene visualizzato "On" e l’accesso al parametro è bloccato.
- Per eliminare il blocco con l’accesso al parametro sbloccato tornare a "OFF"
servendosi del tasto
, quindi premere "ENT". "OFF" resta visualizzato e l’accesso
al parametro risulta sbloccato restandolo anche in seguito alla messa fuori tensione
con successiva messa sotto tensione.
Quando l’accesso è bloccato da un codice sono accessibili solo i parametri di
visualizzazione, con possibilità di scegliere solo provvisoriamente il parametro visualizzato.
Stato dell’autotuning (parametro a carattere informativo)
tAb: Il valore di default della resistenza statorica è utilizzato per comandare il motore.
PEnd: L’autotuning è stato richiesto ma non ancora effettuato.
PrOG: Autotuning in corso.
FAIL: L’autotuning non è riuscito.
dOnE: La resistenza statorica misurata dall’autotuning è utilizzata per comandare il
motore.
Strd: La resistenza statorica a freddo (rSC diverso da nO) è utilizzata per comandare
il motore.
Visualizzazione della versione software dell’ATV31.
Es: 1102 = V1.1 IE02.
Funzioni degli ingressi logici
Permette di visualizzare le funzioni assegnate a ciascun ingresso. Se non è configurata
alcuna funzione, il messaggio visualizzato è nO. I tasti freccia
e
permettono di
visualizzare tutte le funzioni. Se allo stesso ingresso sono assegnate più funzioni
accertarsi che siano compatibili tra loro.
Permette di visualizzare lo stato degli ingressi logici (utilizzo dei segmenti del display: alto
= 1, basso = 0)
stato 1
stato 0
LI1
AIAAI1A
AI2A
AI3A
66
LI2 LI3
LI4 LI5
LI6
Esempio sopra: LI1 e LI6 sono a 1, da LI2 a LI5 sono a 0.
Funzioni degli ingressi analogici
Permette di visualizzare le funzioni assegnate ad ogni ingresso. Se non è visualizzata
alcuna funzione sul display appare il messaggio nO. I tasti freccia
e
permettono
di visualizzare tutte le funzioni. Se allo stesso ingresso sono assegnate più funzioni
accertarsi che siano compatibili tra loro.
Manutenzione
Manutenzione
L’Altivar 31 non richiede manutenzione preventiva. Tuttavia ad intervalli regolari si consiglia di:
• verificare lo stato e il serraggio dei collegamenti,
• accertarsi che la temperatura vicino all’apparecchio resti ad un livello accettabile e che la ventilazione sia sufficiente (durata media dei
ventilatori: da 3 a 5 anni a seconda delle condizioni d’impiego),
• se necessario spolverare il variatore.
Assistenza alla manutenzione, visualizzazione difetti
In caso di anomalia alla messa in servizio o in fase di impiego accertarsi per prima cosa che siano state osservate tutte le indicazioni relative
alle condizioni ambientali, al montaggio e ai collegamenti.
Il primo difetto rilevato viene memorizzato e visualizzato tramite lampeggiamento sul display: il variatore si blocca e il contatto del relè di
difetto (R1) si apre, se è stato assegnato a questa funzione (in preregolazione di base lo è).
Cancellazione del difetto
Scollegare l’alimentazione del variatore in caso di difetto non riarmabile.
Attendere lo spegnimento totale del display.
Ricercare la causa del difetto per eliminarla.
Lo sblocco del variatore in seguito a difetto si effettua:
• mediante messa fuori tensione fino al completo spegnimento del display e successiva rimessa in tensione del variatore,
• automaticamente nei casi descritti nella funzione "riavviamento automatico" (menu FLt-, Atr = YES),
• mediante un ingresso logico quando questo è assegnato alla funzione "reset difetto" (menu FLt-, rSF = LIp).
Menu visualizzazione:
Consente di prevenire e ricercare le cause dei difetti mediante visualizzazione dello stato del variatore e dei relativi valori correnti.
Ricambi e riparazioni:
Consultare il servizio assistenza Schneider Electric.
67
Difetti - cause - procedure di intervento
Mancato avviamento senza segnalazione del difetto
• Se non viene visualizzato alcun messaggio accertarsi che il variatore sia correttamente alimentato.
• La configurazione delle funzioni "Arresto rapido" o "Arresto ruota libera" comporta un mancato avviamento se gli ingressi logici
corrispondenti non sono sotto tensione. L’ATV31 visualizza allora il messaggio "nSt" in arresto ruota libera e "FSt" in arresto rapido.
Questo è normale poichè queste funzioni sono attive a zero per avere la certezza di arresto in caso di rottura del cavo.
• Accertarsi che il o gli ingressi di comando marcia siano azionati conformemente al modo di comando scelto (parametro tCC del menu I-O-).
• Se un ingresso è assegnato alla funzione di finecorsa ed è a zero, il variatore potrà avviare solo con un comando di senso opposto
(vedere pag. 58).
• Se il canale di riferimento velocità (pagina 28) o il canale di comando (pagina 29) è assegnato a Modbus o CANopen, alla messa sotto
tensione il variatore visualizza nSt e resta fermo fino a quando il bus di comunicazione non invia un ordine.
Difetti non riarmabili automaticamente
La causa del difetto deve essere eliminata prima del riarmo mediante messa fuori tensione e successiva messa sotto tensione.
I difetti CrF, SOF, tnF, bLF e OPF sono riarmabili anche a distanza mediante ingresso logico (parametro rSF del menu FLt- pagina 60).
Difetto
bLF
sequenza freno
Possibile causa
• corrente di salita freno
non raggiunta
•
CrF
circuito di carica
dei condensatori
EEF
Difetto EEprom
InF
difetto interno
OCF
sovracorrente
SCF
cortocircuito motore
•
•
•
•
•
•
•
•
SOF
sovravelocità
•
•
tnF
errore autotuning
•
•
68
Procedura di intervento
• Verificare il collegamento variatore / motore.
• Verificare gli avvolgimenti del motore.
• Verificare la regolazione Ibr del menu FUn- (vedere pag. 54)
soglia di frequenza di chiusura del • Effettuare le regolazioni previste da bEn (pagine 53 e 54).
freno bEn = nO (non configurata)
quando il comando del freno bLC
è configurato
difetto di comando del relè
• Sostituire il variatore.
di carico o resistenza di carica
deteriorata
difetto della memoria interna
• Verificare le condizioni ambientali (compatibilità elettromagnetica).
• Sostituire il variatore.
difetto interno
• Verificare le condizioni ambientali (compatibilità elettromagnetica).
• Sostituire il variatore.
Parametri dei menu SEt- e drC- • Verificare i parametri di SEt- e drC-.
non corretti
• Verificare il dimensionamento motore/variatore/carico.
inerzia o carico eccessivo
• Verificare lo stato della meccanica.
blocco meccanico
cortocircuito o messa a terra
• Verificare i cavi di collegamento del variatore al motore, e l’isolamento
in uscita variatore
del motore.
corrente di fuga importante a terra • Ridurre la frequenza di commutazione.
in uscita variatore in caso di più
• Aggiungere delle induttanze in serie al motore.
motori in parallelo.
instabilità o
• Verificare i parametri motore, guadagno e stabilità.
carico azionante eccessivo
• Aggiungere una resistenza di frenatura.
• Verificare il dimensionamento motore / variatore / carico.
motore speciale o motore di potenza • Utilizzare la legge L o la legge P (vedere UFt pagina 21).
• Verificare la presenza del motore in fase di autotuning.
non adatta al variatore
motore non collegato al variatore • In caso di utilizzo di un contattore a valle chiuderlo durante l’autotuning.
Difetti - cause - procedure di intervento
Difetti riarmabili con la funzione riavviamento automatico, in seguito all’eliminazione della causa
Anche questi difetti possono essere riarmati mediante messa fuori tensione e successiva messa sotto tensione del variatore o mediante
ingresso logico (parametro rSF del menu FLt- pagina 60)
Difetto
COF
difetto CANopen
EPF
difetto esterno
LFF
perdita 4-20 mA
ObF
sovratensione
in decelerazione
OHF
sovraccarico variatore
OLF
sovraccarico motore
OPF
interruzione fase motore
OSF
sovratensione
PHF
interruzione fase
rete
SLF
difetto Modbus
Possibile causa
• interruzione della comunicazione
su bus CANopen
• secondo l’utilizzatore
Procedura di intervento
• Verificare il bus di comunicazione.
• Consultare la documentazione specifica.
• secondo l’utilizzatore.
• perdita del valore di set up
4-20 mA sull’ingresso AI3
• frenatura troppo brutale
o carico trascinante
• Verificare il collegamento sull’ingresso AI3.
• Aumentare il tempo di decelerazione.
• Se necessario aggiungere una resistenza di frenatura.
• Attivare la funzione brA (pagina 38) se è compatible con
l'applicazione.
• temperatura variatore troppo
• Controllare il carico motore, la ventilazione variatore e le
elevata
condizioni ambientali. Attendere il raffreddamento per
riavviare.
• sgancio per corrente motore
• Verificare la regolazione ItH (pagina 16) della protezione
termica motore, controllare il carico del motore. Attendere il
troppo elevata
raffreddamento per riavviare.
• interruzione di una fase in uscita • Verificare i collegamenti del variatore al motore
variatore
• In caso di utilizzo di un contattore a valle, assegnare OPL a
• contattore a valle aperto
OAC (menu FLt- pagina 61).
• motore non collegato o di potenza • Prova su motore di debole potenza o senza motore: in
preregolazione di base, la funzione di rilevamento perdita
non sufficiente
fase motore è attiva (OPL = YES). Per verificare il variatore
• instabilità istantanea
in condizioni di test o di manutenzione e senza dover
della corrente motore
ricorrere ad un motore equivalente al calibro del variatore
(in particolare per i variatori di potenze elevate), disattivare
la funzione di rilevamento fase motore (OPL = no).
• Verificare e ottimizzare i parametri UFr (pagina 17), UnS e
nCr (pagina 20), ed eseguire un autotuning con tUn (pagina
21).
• tensione rete troppo elevata
• Verificare la tensione rete.
• rete disturbata
• variatore mal alimentato o
• Verificare il collegamento potenza e i fusibili.
intervento di un fusibile
• interruzione di una fase
• Riarmare.
• utilizzo su rete monofase
• Utilizzare una rete trifase.
di un ATV31 trifase
• carico con squilibrio
• Inibire il difetto con IPL = nO (menu FLt- pagina 61).
Protezione che funziona solo con
motore caricato
• interruzione della comunicazione • Verificare il bus di comunicazione.
su bus Modbus
• Consultare la documentazione specifica.
Difetti riarmati spontaneamente all’eliminazione della causa
Difetto
CFF
difetto configurazione
Possibile causa
• La configurazione utilizzata
è incoerente.
CFI
difetto configurazione
tramite collegamento seriale
• Configurazione non valida
La configurazione caricata
nel variatore tramite collegamento
seriale è incoerente.
• rete troppo debole
• Verificare la tensione e il parametro tensione.
• abbassamento di tensione
passeggero
• Sostituire il variatore.
• resistenza di carica deteriorata
USF
sottotensione
Procedura di intervento
• Tornare alla preregolazione di base o richiamare la
configurazione in memoria se valida. Vedere parametro
FCS del menu I-O-, drC-, CtL- o FUn-.
• Verificare la configurazione precedentemente caricata.
• Caricare una configurazione coerente.
69
Tabella di memorizzazione configurazione/regolazioni
Variatore ATV 31...............................................................................................................................................................................................
Eventuale n° identificazione cliente...................................................................................................................................................................
Parametro di regolazione 1o livello
>.H
Codice
bFr
Preregolaz. di base
50
Menu regolazioni
Regolazione cliente
SEt-
Codice
Preregolazione di base
ACC
AC2
dE2
dEC
tA1
tA2
tA3
tA4
LSP
HSP
ItH
UFr
FLG
StA
SLP
IdC
tdC
tdCI
SdC1
tdC2
SdC2
JPF
JF2
JGF
rPG
rIG
FbS
PIC
rP2
rP3
rP4
SP2
SP3
3s
5s
5s
3s
10%
10%
10%
10%
0 Hz
bFr
In base al calibro variatore
20 %
20 %
20 %
100 Hz
0,7 In (1)
0,5
0,5 s
0,7 In (1)
0s
0,5 In (1)
0 Hz
0 Hz
10 Hz
1
1/s
1
nO
30 %
60 %
90 %
10 Hz
15 Hz
Regolazione
cliente
Codice
s
s
s
s
%
%
%
%
Hz
Hz
A
%
%
%
%
A
s
s
s
s
A
Hz
Hz
Hz
/s
SP4
SP5
SP6
SP7
SP8
SP9
SP10
SP11
SP12
SP13
SP14
SP15
SP16
CLI
CL2
tLS
rSL
UFr2
FLG2
s StA2
SLP2
Ftd
ttd
Ctd
SdS
SFr
Preregolazione di base
Regolazione
cliente
20 Hz
25 Hz
30 Hz
35 Hz
40 Hz
45 Hz
50 Hz
55 HZ
60 Hz
70 Hz
80 Hz
90 Hz
100 Hz
1,5 In (1)
1,5 In (1)
0 (nessuna limitazione di tempo)
0
20 %
20 %
20 %
100 %
bFr
100 %
In (1)
30
4 kHz
Hz
Hz
Hz
Hz
Hz
Hz
Hz
Hz
Hz
Hz
Hz
Hz
Hz
A
A
s
%
%
%
%
Hz
%
A
kHz
%
%
%
Hz
Hz
(1) In corrisponde alla corrente nominale variatore indicata nella guida all’installazione e sulla targhetta del variatore
Parametri visualizzati solo se la funzione corrispondente è stata selezionata in un altro menu. La maggior parte sono
accessibili e regolabili anche dal menu di configurazione della funzione.
I parametri sottolineati appaiono nella preregolazione di base.
70
Tabella di memorizzazione configurazione/regolazioni
Menu controllo motore
Codice
bFr
UnS
FrS
nCr
nSP
COS
rSC
Preregolazione di base Regolazione cliente
50 Hz
Hz
in base al calibro variatore
V
50 Hz
Hz
in base al calibro variatore
A
in base al calibro variatore
RPM
in base al calibro variatore
nO
Menu Ingressi /uscite
Codice
tCC
tCt
rrS
CrL3
CrH3
Fr2
rFC
CHCF
Cd1
Codice
tUS
UFt
nrd
SFr
tFr
SrF
Preregolazione di base
tAb
n
YES
4 kHz
60 Hz
nO
Regolazione cliente
Codice
AOIt
Preregolazione di base
0A
Regolaz. cliente
kHz
Hz
I-O-
Preregolazione di base
2C
ATV31ppppppA: LOC
trn
se tCC = 2C, LI2
se tCC = 3C, LI3
se tCC = LOC: nO
4 mA
20 mA
Menu Comando
Codice
LAC
Fr1
drC-
Regolaz. cliente
mA
mA
dO
r1
nO
FLt
r2
nO
CtL-
Preregolazione di base
L1
AI1
AIP per ATV31ppppppA
nO
Fr1
SIM
tEr
LOC per ATV31ppppppA
Regolazione cliente
Codice
Cd2
CCS
COp
LCC
PSt
rOt
Preregolazione di base
Mdb
Cd1
Regolazione cliente
nO
nO
YES
dFr
Questi parametri appaiono solo se la funzione corrispondente è validata
71
Tabella di memorizzazione configurazione/regolazioni
Menu Funzioni applicazioni
Codice
rPCrPt
StC-
AdC-
SAIPSS-
tA1
tA2
tA3
tA4
ACC
dEC
rPS
Frt
AC2
dE2
brA
Stt
FSt
dCF
dCI
IdC
tdC
nSt
AdC
tdC1
SdC1
tdC2
SdC2
SA2
SA3
PS2
PS4
PS8
PS16
SP2
SP3
SP4
SP5
SP6
SP7
SP8
SP9
SP10
SP11
SP12
SP13
SP14
SP15
SP16
72
FUn-
Preregol. di base Regol. cliente
LIn
10 %
10 %
10 %
10 %
3s
3s
nO
0
5s
5s
YES
Stn
nO
4
nO
0,7 In
0,5 s
nO
YES
0,5 s
0,7 In (1)
0s
0,5 In (1)
AI2
nO
Se tCC = 2C: LI3
Se tCC = 3C: LI4
Se tCC = LOC: LI3
Se tCC = 2C: LI4
Se tCC = 3C:nO
Se tCC = LOC: LI4
nO
nO
10 Hz
15 Hz
20 Hz
25 Hz
30 Hz
35 Hz
40 Hz
45 Hz
50 Hz
55 Hz
60 Hz
70 Hz
80 Hz
90 Hz
100 Hz
Codice
JOGJOG
%
%
%
%
s
s
UPd-
PI-
Hz
s
s
A
s
bLCs
A
s
A
LC2-
CHP-
Hz
Hz
Hz
Hz
Hz
Hz
Hz
Hz
Hz
Hz
Hz
Hz
Hz
Hz
Hz
LSt-
JGF
USP
dSP
Str
PIF
rPG
rIG
FbS
PIC
Pr2
Pr4
rP2
rP3
rP4
rSL
PII
rPI
bLC
brL
Ibr
brt
bEn
bEt
bIP
LC2
CL2
Preregol. di base
Regol. cliente
Se tCC = 2C: nO
Se tCC = 3C: LI4
Se tCC = LOC: nO
10 Hz
nO
nO
nO
nO
1
1
1
nO
nO
nO
30 %
60 %
90 %
0
nO
0%
nO
in base al calibro variatore
in base al calibro variatore
0,5 s
nO
0,5 s
nO
nO
1,5 In (1)
CHP
nO
UnS2
FrS2
nCr2
nSP2
COS2
UFt2
UFr2
FLG2
StA2
SLP2
LAF
LAr
LAS
in base al calibro variatore
50 Hz
in base al calibro variatore
in base al calibro variatore
in base al calibro variatore
n
20 %
20 %
20 %
100 Hz
nO
nO
nSt
Hz
%
%
%
%
Hz
A
s
Hz
s
A
V
Hz
A
RPM
%
%
%
Hz
(1) In corrisponde alla corrente nominale variatore indicata nella
guida all’installazione e sulla targhetta del variatore
Questi parametri appaiono solo se la funzione
corrispondente è validata
Tabella di memorizzazione configurazione/regolazioni
Menu Difetti
Codice
Atr
tAr
rSF
FLr
EtF
EPL
OPL
IPL
OHL
OLL
FLt-
Preregolazione di base
nO
5
nO
nO
nO
YES
YES
YES
YES
YES
Menu Comunicazione
Codice
Add
tbr
tFO
ttO
AdCO
Regolazione cliente
Codice
SLL
COL
tnL
LFL
LFF
drn
StP
InH
rPr
Preregolazione di base
YES
YES
YES
nO
10 Hz
nO
nO
nO
nO
Regolazione cliente
Codice
bdCO
FLO
FLOC
Preregolazione di base
125
nO
AI1
AIP per ATV31ppppppA
Regolazione cliente
Hz
CON-
Preregolazione di base
1
19200
8E1
10 s
0
Regolazione cliente
s
Questi parametri appaiono solo se la funzione corrispondente è validata
73
Indice dei codici dei parametri
AC2
ACC
AdC
AdCO
Add
AI1A
AI2A
AI3A
AOIt
Atr
bdCO
bEn
bEt
bFr
bIP
bLC
brA
brL
brt
CCS
Cd1
Cd2
CHCF
CHP
CL2
CLI
COd
COp
COS
COS2
CrH3
CrL3
Ctd
dCF
dCI
dE2
dEC
dO
drn
dSP
EPL
ErCO
EtF
FbS
FCS
FLG
FLG2
FLO
74
38
38
41
63
63
66
66
66
24
60
63
54
54
20
54
54
38
54
54
35
34
34
34
56
55
18
66
35
20
57
24
24
19
39
39
38
16
24
62
48
61
63
61
51
22
17
57
63
FLOC
FLr
Fr1
Fr2
FrH
FrS
FrS2
Frt
FSt
Ftd
HSP
Ibr
IdC
InH
IPL
ItH
JF2
JGF
JOG
JPF
LAC
LAF
LAr
LAS
LC2
LCC
LCr
LFF
LFL
LFr
LFt
LI1A
LI2A
LI3A
LI4A
LI5A
LI6A
LIS
LSP
nCr
nCr2
nrd
nSP
nSP2
nSt
OHL
OLL
OPL
63
61
33
33
65
20
56
38
39
19
16
54
39
62
61
16
18
46
46
18
33
58
58
58
55
35
65
62
62
65
65
66
66
66
66
66
66
66
16
20
56
21
20
56
40
61
61
61
Opr
Otr
PIC
PIF
Pr2
Pr4
PS16
PS2
PS4
PS8
PSt
r1
r2
rFC
rFr
rIG
rOt
rP2
rP3
rP4
rPG
rPI
rPI
rPr
rPS
rPt
rrS
rSC
rSF
rSL
rtH
SA2
SA3
SCS
SdC1
SdC2
SdS
SFr
SLL
SLP
SLP2
SP10
SP11
SP12
SP13
SP14
SP15
SP16
65
65
51
51
51
51
45
44
44
44
35
24
24
34
65
51
35
51
51
51
51
52
65
62
38
37
23
21
60
52
65
42
42
22
41
41
19
22
62
17
57
45
45
45
45
45
45
45
SP2
SP3
SP4
SP5
SP6
SP7
SP8
SP9
SPd1
SPd2
SPd3
SrF
StA
StA2
StP
Str
Stt
tA1
tA2
tA3
tA4
tAr
tbr
tCC
tCt
tdC1
tdC
tdC2
tFr
tHd
tHr
tLS
ttd
ttO
tUn
tUS
tUS
UdP
UFr
UFr2
UFt
UFt2
ULn
UnS
UnS2
USP
45
45
45
45
45
45
45
45
65
65
65
22
17
57
62
48
39
37
38
38
38
60
63
23
23
41
39
41
22
65
65
18
19
63
21
21
66
66
17
57
21
57
65
20
56
48
Indice delle funzioni
Adattamento rampa di decelerazione
Arresto rapido mediante ingresso logico
Arresto ruota libera mediante ingresso logico
Autotuning
Canali di comando e di set up parametri
CANopen: indirizzo del variatore
Scelta del tipo di legge tensione / frequenza
Comando 2 fili / 3 fili
Comando freno
Commutazione 2a limitazione di corrente
Commutazione canale di comando
Commutazione valore
Commutazione di rampa su ingresso logico
Commutazione motori
Riarmo del difetto in corso
Ingressi sommatori
Forzatura locale
Frequenza di commutazione
Frequenza mascherata
Gestione finecorsa
Iniezione di corrente automatica a motore fermo (a fine rampa)
Iniezione di corrente continua da ingresso logico
Limitazione di corrente
Marcia passo-passo JOG
Modbus: indirizzo del variatore
Modi di arresto
Livello di accesso alle funzioni
Più veloce / meno veloce
Protezione termica del motore
Protezione termica del motore - corrente termica max
Protezione termica del variatore
Rampe
Ritorno alla preregolazione di base / Richiamo configurazione
Riavviamento automatico
Regolatore PI
Relè r1
Relè r2
Ripresa al volo (ripresa automatica di rampa)
Salvataggio della configurazione
Uscita analogica / logica AOC/AOV
Ventilazione dei variatori
Velocità preselezionate
38
39
40
21
26
63
21
23
53
55
35
34
38
56
60
42
63
22
39
58
41
39
18
46
63
39
33
47
6
16
5
37
22
60
49
24
24
61
22
24
5
43
75
VVDED303042 IT
atv31_programming manual_IT_V1
2003-09