Cap. 5
Rappresentazioni grafiche di modelli
5.1 Schemi strutturali e schemi funzionali
Nello studio dei sistemi vengono usualmente impiegate rappresentazioni grafiche
convenzionali, denominate schemi. Questi ultimi si distinguono in schemi strutturali e schemi
funzionali.
Gli schemi strutturali sono rappresentazioni grafiche di un sistema reale, nei quali alcuni
blocchi rappresentano gli elementi costituenti il sistema, mentre altri rappresentano gli organi
di collegamento fra i suddetti elementi. Tali schemi danno, quindi, un’idea della
composizione fisica del sistema reale. Per rappresentare, ad esempio, il funzionamento di una
centrale idroelettrica, è possibile costruire lo schema strutturale di Fig. 5.1.1, dove q è la
portata d’acqua che giunge attraverso un’apposita condotta da un fiume, T è una turbina
collegata meccanicamente a un alternatore A che fornisce direttamente un sistema trifase di
tensioni.
q
T
A
Fig. 5.1.1 Schema di un sistema per la produzione dell’energia elettrica.
Uno schema funzionale è una rappresentazione grafica di un modello matematico di un
sistema reale, in cui alcuni simboli rappresentano le grandezze che figurano nel modello, e
altri simboli rappresentano i legami matematici fra tali grandezze.
Lo studio degli schemi funzionali viene sviluppato assumendo che il sistema reale sia
caratterizzato da k grandezze dipendenti, yi (t ) , e p grandezze indipendenti, ui (t ) , che sono le
grandezze d’ingresso. Delle k grandezze dipendenti, q sono le grandezze di uscita e k – q
sono le grandezze intermedie. Si ammette, inoltre, che il modello matematico del sistema nel
dominio del tempo sia costituito da k equazioni integro – differenziali, lineari, ordinarie e a
coefficienti costanti che legano le k grandezze dipendenti alle p grandezze indipendenti.
Al fine di associare uno schema funzionale al modello matematico del sistema, conviene
esprimere quest’ultimo nel dominio di s, trasformando secondo Laplace le k equazioni
integro-differenziali assumendo nulle le condizioni iniziali. Si ottiene, in tal modo, un sistema
costituito da k equazioni algebriche nel dominio di s, che legano le trasformate di Laplace
delle variabili dipendenti, Yi ( s ) , alle trasformate di Laplace delle grandezze indipendenti
U i ( s ) . Tali equazioni costituiscono la cosiddetta forma causa – effetto, la quale consiste
nell’esprimere la generica grandezza dipendente Yi ( s ) come combinazione lineare di tutte le
grandezze dipendenti, compresa eventualmente la stessa Yi ( s ) , e di tutte le grandezze
indipendenti U i ( s ) :
k
Yi ( s ) =
p
∑ Tij ( s) Y j (s) +
∑ Tij'
j =1
j =1
( s ) U j ( s ), i = 1, k ,
(5.1.1)
Il nome di formulazione causa – effetto dipende dal fatto che la grandezza dipendente al
primo membro può essere interpretata come l’effetto delle variabili al secondo membro che
acquistano così il significato di cause. I coefficienti Tij ( s ) e Tij' ( s ) si chiamano trasferenze e
sono, in genere, funzioni razionali fratte di s; le funzioni Tii ( s ) prendono il nome di
autotrasferenze mentre le funzioni Tij ( s ) con i ≠ j , vengono denominate trasferente mutue.
Esempio 5.1.1
Si consideri il seguente modello matematico di un sistema reale nel dominio del tempo:
Ay1( 2 ) + B y1(1) + C y1 − D y 2 = Fu1
.
(2)
(1)
(1)
Py 2 + H y 2 + K y1 = − Ju1
(5.1.2)
Trasformando secondo Laplace tale modello, assumendo nulle le condizioni iniziali, si ha il
seguente modello algebrico nel dominio di s:
As 2Y1 ( s ) + BsY1 ( s ) + CY1 ( s ) − DY2 ( s ) = FU 1 ( s )
2
Ps Y2 ( s ) + HsY2 ( s ) + KY1 ( s ) = − JsU 1 ( s )
(5.1.3)
Risolvendo la prima equazione rispetto a Y1 ( s ) e la seconda rispetto a Y2 ( s ) , si ottiene la
forma causa-effetto:
Y1 ( s ) = T12 ( s ) Y2 ( s ) + T '11 U 1 ( s )
,
Y2 ( s ) = T21 ( s ) Y1 ( s ) + T '21 ( s ) U 1 ( s )
(5.1.4)
dove:
T12 ( s ) =
D
F
,
, T11' ( s ) =
2
A s + B s+ C
A s + B s+ C
2
T21 ( s ) = −
K
Js
'
.
, T21
−
2
Ps + Hs
Ps + Hs
2
Bisogna osservare che, data l’arbitrarietà con cui è possibile risolvere le k equazioni che
governano il sistema, si può pervenire a diverse formulazioni causa – effetto; quindi a un
modello matematico si possono associare diversi schemi funzionali. Tutti gli schemi
funzionali associabili allo stesso modello matematico sono equivalenti fra loro, nel senso che
hanno in comune le grandezze d’ingresso, le grandezze d’uscita e le relazioni che intercorrono
fra esse.
Allo scopo di rappresentare graficamente le equazioni della forma causa – effetto (5.1.1), è
necessario scegliere dei simboli per rappresentare le grandezze e i legami matematici fra esse.
Gli schemi funzionali più utilizzati sono gli schemi a blocchi e i grafi di flusso.
5.2 Schemi a blocchi
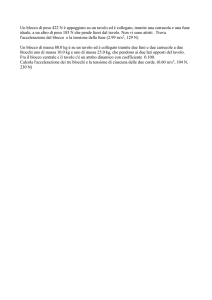
Le convenzioni adottate per
medianteschemi a blocchi, sono:
rappresentare
graficamente
le
equazioni
(5.1.1)
a)
b)
c)
d)
a ciascuna variabile indipendente, U i ( s ) , o dipendente, Yi ( s ) , si associa un segmento
orientato (cfr. Fig. 5.1.1 a));
l’operazione di moltiplicazione per una trasferenza si rappresenta con un blocco,
solitamente di forma rettangolare, dotato di un solo ingresso e una sola uscita,
all’interno del quale viene indicata la trasferenza per cui va moltiplicata la variabile
associata al segmento di ingresso per ottenere quella associata al segmento di uscita
(cfr. Fig. 5.1.1 b));
l’operazione di somma fra più grandezze si rappresenta mediante un blocco,
generalmente di forma circolare, dotato di un solo segmento di uscita e di più segmenti
di ingresso; a ciascuno di tali segmenti si associa il segno + o − a seconda che la
variabile corrispondente debba essere sommata o sottratta (cfr. Fig. 5.1.1 c));
il fatto che la stessa variabile figuri in più operazioni viene rappresentato con un punto
di diramazione, dal quale partono altri segmenti, orientati in maniera coerente, che
affluiscono ad altri blocchi.
Yi (Ui)
Tij
Yj
SEGMENTO ORIENTATO
Yi = Tij Yj
b)
BLOCCO MOLTIPLICATORE
Yi = Yj−1 + Yj − Yj+1
c)
BLOCCO SOMMATORE
d)
PUNTO DI DIRAMAZIONE
+
Yj−1
Yj
Yi
a)
+
−
Yi
Yj+1
Yi
Yi
Yi
Yi
Fig. 5.1.1 Convenzioni adottate per gli schemi a blocchi.
Può essere data, infine, la seguente definizione di schema a blocchi. Si dice schema a
blocchi un insieme di blocchi moltiplicatori e di blocchi sommatori, collegati fra loro da
segmenti orientati, sui quali possono esistere dei punti di diramazione. I blocchi
moltiplicatori, i blocchi sommatori e i punti di diramazione sono denominati elementi
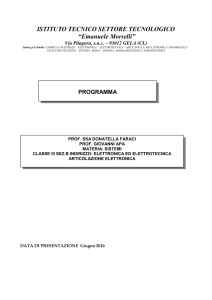
fondamentali dello schema a blocchi. Lo schema a blocchi corrispondente all’esempio 5.1.1 è
quelo riportato nella Fig. 5.1.2.
T12 ( s )
U1 ( s )
+
+
Y1 ( s )
T11' ( s )
+
+
T21 ( s )
+
Y2 ( s )
'
T21
(s)
Fig. 5.1.2 Schema a blocchi corrispondente al modello (5.1.4).
5.2.1 Algebra degli schemi a blocchi
Lo schema funzionale associato a un modello matematico può risultare alquanto
complicato, mentre molti metodi di studio dei sistemi di controllo si riferiscono a uno schema
a blocchi avente una struttura ben definita. Un problema che spesso ricorre nelle applicazioni
è, dunque, quello di trasformare un dato schema a blocchi in uno equivalente, avente però la
struttura desiderata. Tale problema può essere risolto utilizzando un insieme di procedimenti
che costituiscono l’algebra degli schemi a blocchi. I procedimenti di trasformazione si
distinguono in:
1) procedimenti di spostamento di un elemento fondamentale rispetto a un altro elemento
fondamentale adiacente;
2) procedimenti di sostituzione di un unico blocco con più blocchi e viceversa.
PROCEDIMENTI DI SPOSTAMENTO
Nei procedimenti di spostamento si prendono in considerazione, oltre all’elemento da
spostare, anche quello rispetto al quale avviene lo spostamento, detto elemento fisso, e il
segmento che li unisce, chiamato segmento comune. Sussistono allora le seguenti tre regole
fondamentali, la cui dimostrazione è immediata sulla base dell’applicazione delle condizioni
di equivalenza.
a) spostamento di un blocco moltiplicatore
Quale che sia l’elemento fisso, il blocco moltiplicatore scompare dal segmento in cui si
trovava nello schema di partenza e compare nello schema equivalente su tutti gli altri
segmenti orientati facenti capo all’elemento fisso. La trasferenza da associare ad ogni
nuovo blocco è la stessa del blocco spostato o la sua inversa a seconda che, considerando
un percorso attraverso l’elemento fisso, il segmento comune e quello che si considera
hanno verso concorde o discorde (cfr. Fig. 5.1.3 e 5.1.4 a) e b)).
b
G1−1
a
+
G1
− b
+
−
d
a
+
d
G1
≡
+
+
c
G1
d = G1 a – b + c
−1
d=[
c
a) schema di partenza
1
1
c+a–
b]G1
G1
G1
b) schema equivalente
Fig. 5.1.3 Spostamento di un blocco moltiplicatore rispetto a un blocco sommatore.
b
b
G1
a
a
a
a) schema di partenza
G1−1
G1
a
b) schema equivalente
Fig. 5.1.4 Spostamento di un blocco moltiplicatore rispetto a un punto di diramazione.
b) spostamento di un blocco sommatore rispetto a un altro blocco sommatore
Il blocco sommatore da spostare scompare dal segmento su cui si trovava e compare su
di uno solo dei segmenti che fanno capo all’elemento fisso; i segni da associare ai segmenti
di ingresso devono rispettare le relazioni di equivalenza. Naturalmente esistono diverse
soluzioni per lo spostamento dello stesso blocco sommatore (cfr. Fig. 5.1.5).
S2
S1
a
S2
+
S2
d
+
−
b
a
S1
+
d
≡
+
c
a
+
+
≡
+
c
−
b
d
−
b
S1
+
a–b+c=d
a) schema di partenza
(a + c) – b = d
b) schema equivalente
c
a + (c – b) = d
c) schema equivalente
Fig. 5.1.5 Spostamento di un blocco sommatore rispetto a un blocco sommatore.
c) spostamento di un blocco sommatore rispetto a un punto di diramazione
Il blocco da spostare scompare dal segmento su cui era e compare su tutti gli altri
segmenti che fanno capo al punto di diramazione (fig. 82). Anche in questo caso per
assegnare correttamente i segni ai segmenti entranti nei blocchi sommatori basta tener
conto delle condizioni di equivalenza.
+ b
+
b
+
+ b
a +
+
≡
a
Fig. 5.1.5 Spostamento di un blocco sommatore rispetto a un punto di diramazione.
PROCEDIMENTI DI SOSTITUZIONE
I procedimenti di sostituzione più comuni sono:
Sostituzione di parte dello schema costituita da soli blocchi sommatori con un unico blocco
sommatore
La sostituzione avviene con un blocco sommatore che ha tutti i segmenti d’ingresso della
parte di schema ablocchi di partenza, esclusi i segmenti comuni a due blocchi sommatori (cf.
Fig. 5.1.6).
c
+
b
b +
+
e
−
f
d
≡
d
a
+
+
+
a
c
+
+
+
+ −
f
e
f=a+b+c+d–e
f = [(b + c) + (a + d)] – e
Fig. 5.1.6 Sostituzione di parte di schema costituita dablocchi sommatori con un blocco
sommatore
Sostituzione di parte dello schema costituita da soli blocchi moltiplicatori connessi in cascata
con un unico blocco moltiplicatore e viceversa
Due o più blocchi moltiplicatori si dicono connessi in cascata se il segmento di uscita di
ognuno di essi è anche il segmento di ingresso del blocco successivo. La sostituzione viene
effettuata con un blocco moltiplicatore avente trasferenza pari al prodotto delle trasferenze dei
singoli blocchi moltiplicatori delloschema di partenza (cfr. Fig. 5.1.7). Il viceversa è illustrato
nella Fig. 5.1.8.
a
G1
G2
b
a
≡
b = G2 (G1 a)
b
G1⋅G2
b = (G1⋅G2) a
Fig. 5.1.7 Sostituzione diparte dello schema costituita dablocchi moltiplicatori in cascata con
un blocco moltiplicatore
a
G1
b
≡
a
G1/G2
b = G1 a
G2
b
b = G2 (G1/G2) a
Fig. 5.1.8 Sostituzione di un blocco moltiplicatore con due blocchi moltiplicatori in cascata.
Sostituzione di parte dello schema costituita da uno schema elementare a controreazione con
un unico blocco moltiplicatore
Lo schema elementare a controreazione è illustrato nella Fig. 5.1.9. A tale schema è possibile
sostituire uno schema equivalente costituito da un unico blocco moltiplicatore, la cui
trasferenza W(s) è data da:
W ( s) =
U +
G( s)
.
1 ∓ G (s ) H (s)
Ud
(5.1.5)
Y
G
± Yc
H
Fig. 5.1.9 Schema elementare a controreazione.
La (5.1.5) può essere verificata associando il seguente modello allo schema di Fig. 5.1.9:
U d = U ± Yc = U ± HY
Y = GU d = G (U ± HY )
Dalla seconda delle (5.1.6), si ottiene:
Y (1 ∓ GH ) = GU ,
e quindi:
Y=
G
U = WU .
1 ∓ GH
(5.1.6)
Sostituzione di parte dello schema costituita da moltiplicatori connessi in parallelo con un
unico blocco moltiplicatore e viceversa
Sia dato lo schema a blocchi di Fig. 5.1.10, costituito da tre blocchi moltiplicatori in
parallelo. Tale schema è equivalente a un blocco moltiplicatore avente trasferenza G(s) data
da:
G ( s ) = G1 ( s ) + G2 ( s ) − G3 ( s ) .
G1
a
+ b
G2
G3
+
-
Fig. 5.1.10 Schema costituito da tre blocchi in parallelo.
(5.1.7)