Termodinamica delle Macchine
II.1)
Sistemi termodinamici, equilibrio termodinamico.
Si chiama sistema termodinamico una definita quantità di materia o una definita porzione di spazio
su cui s'intende operare per particolari fini o che si vuole semplicemente osservare.
La quantità di materia si chiama massa di controllo, la porzione di spazio invece si chiama volume
di controllo.
Tutto ciò che è esterno al sistema e in grado di interagire con esso è indicato con il nome di
ambiente.
Si definiscono due tipi di sistemi: i sistemi chiusi, delimitati da superfici impermeabili al passaggio
di materia, e i sistemi aperti, i cui confini sono, almeno parzialmente, permeabili alla materia.
Un sistema chiuso è in equilibrio se le sue condizioni permangono indefinitamente invariate qualora
non si abbiano variazioni nelle condizioni dell’ambiente.
Se il sistema in equilibrio, in seguito a una piccola perturbazione esterna, ritorna nelle sue
condizioni iniziali, l’equilibrio è detto stabile; se viceversa non vi ritorna, l’equilibrio è detto
instabile.
Un sistema chiuso in equilibrio stabile viene anche detto in equilibrio termodinamico. Esso
comporta in particolare che risultano nulli tutti i flussi di massa e di energia e tutte le generazioni
interne di energia. L’equilibrio termodinamico implica infatti l’equilibrio meccanico, chimico e
termico del sistema.
Un sistema chiuso in equilibrio termodinamico può essere caratterizzato da un insieme di grandezze
dette proprietà termodinamiche.
Queste si suddividono in proprietà termostatiche o interne e proprietà meccaniche o esterne. Le
proprietà termostatiche sono dipendenti solo dalla struttura fisica e chimica della materia in sistemi
chiusi in equilibrio termodinamico (p.e. la temperatura e il volume del sistema). Le proprietà
meccaniche determinano la posizione del sistema nello spazio e nel tempo rispetto a un opportuno
sistema di riferimento (p.e. la quota e la velocità del sistema).
Le proprietà caratteristiche ora descritte si suddividono in intensive ed estensive. Le proprietà
intensive non dipendono dall’estensione del sistema (p.e. temperatura, pressione, conducibilità
elettrica). Invece le proprietà estensive dipendono dall’estensione del sistema e cioè dalla sua massa
(p.e. massa, volume, energia).
Le proprietà specifiche sono definite come proprietà estensive relative all’unità di massa (p.e. se si
indica con Y una generica proprietà estensiva, la corrispondente proprietà specifica è y = Y m ).
L’insieme delle proprietà termostatiche e meccaniche di un sistema chiuso all’equilibrio
termodinamico ne definisce lo stato; l’insieme delle proprietà termostatiche intensive definisce
invece lo stato termodinamico.
Si chiama varianza V di un sistema termodinamico il numero dei gradi di libertà del sistema ovvero
il numero delle variazioni indipendenti delle proprietà intensive p,T che possono essere imposte al
sistema senza che cambi il numero di fasi presenti.
Per conoscere quante proprietà intensive sono necessarie e sufficienti per individuare lo stato
termodinamico di un sistema in modo univoco si può impiegare la regola delle fasi, dovuta a Gibbs:
V = n−f +2
(II.1.1)
1
dove n è il numero dei componenti chimici del sistema e f il numero di fasi presenti nel sistema.
Se per esempio abbiamo un sistema costituito da ossigeno gassoso la varianza è 2. Le proprietà
intensive necessarie ad individuare univocamente lo stato del sistema sono due (p.e. p e T, oppure T
e s, oppure p e v).
Se abbiamo un sistema con più componenti, ad esempio l’aria, che dopo il processo rimangono
nelle stesse proporzioni, nella regola delle fasi lo posso considerare come un solo componente.
Se invece abbiamo un sistema costituito da vapore d’acqua in equilibrio con il liquido la varianza è
1 e abbiamo bisogno di una sola proprietà per individuarne lo stato.
Se sono in equilibrio tutte e tre le fasi la varianza è 0 e quindi esiste un solo stato di equilibrio che si
chiama punto triplo.
II.2)
Trasformazioni, calore, lavoro.
Si dice trasformazione termodinamica di un sistema una qualunque modificazione che comporti la
variazione di almeno una delle sue proprietà termostatiche. Una trasformazione che riporti il
sistema nello stato iniziale si dice trasformazione chiusa o ciclo.
Si consideri un sistema in equilibrio termodinamico. Se si modifica di una quantità infinitesima
qualcuna delle proprietà dell’ambiente in modo da alterare l’equilibrio ambiente-sistema,
quest’ultimo subirà una trasformazione infinitesima alla fine della quale raggiungerà una nuova
condizione di equilibrio. Una trasformazione finita costituita da una successione di trasformazioni
infinitesime così descritte è detta quasi statica.
All’energia che durante una qualsiasi trasformazione attraversa le superfici del sistema si dà il nome
di calore o di lavoro. Si parlerà di calore se l’energia è trasferita in conseguenza di una differenza di
temperatura esistente tra sistema e ambiente, altrimenti si parla di lavoro.
Per la definizione data non è possibile parlare di calore e di lavoro per un sistema in equilibrio
termodinamico perché essi sono energia in transito attraverso le pareti di un sistema sede di una
trasformazione.
Il calore e il lavoro non sono quindi proprietà di stato e il loro valore dipenderà dalla particolare
trasformazione effettuata.
Per effettuare i bilanci di energia, come per esempio avviene per il 1° Principio della
Termodinamica, è necessario attribuire un segni al valore numerico del calore e del lavoro. La
convenzione usata è di considerare il lavoro positivo se l’energia è somministrata all’ambiente,
negativo nel caso opposto; di considerare il calore positivo se l’energia è somministrata al sistema,
negativo nel caso opposto.
L-, Q+
Sistema
L+, Q-
Poiché il calore e il lavoro non sono funzioni di stato, la quantità infinitesima di lavoro compiuto e
la quantità di calore scambiato in una trasformazione infinitesima saranno indicati con i simboli δL,
δl, δQ, δq. La differenza di simbologia adoperata ricorda che il lavoro e il calore non sono
differenziali esatti.
2
Avviene una trasformazione reversibile quando, partendo da uno stato di equilibrio termodinamico,
il sistema e l’ambiente possono essere riportati nei rispettivi stati iniziali ripercorrendo la stessa
trasformazione senza che ne rimanga traccia alcuna. Questo significa che una trasformazione
reversibile è necessariamente quasi statica e passa attraverso una successione di stati di equilibrio
(quindi ha senso parlare di cammino della trasformazione).
Un prima causa di non reversibilità è quindi senz’altro la non quasi staticità della trasformazione.
Altre cause di irreversibilità sono ad esempio la viscosità, gli attriti e tutti quelli che si suole
denominare effetti dissipativi.
II.3)
1° Principio della termodinamica.
La formulazione del 1° principio della termodinamica per i sistemi chiusi può essere espressa come
un bilancio di energia che si deve realizzare qualunque sia la trasformazione che avviene all’interno
del sistema:
Eentrante - Euscente = Eaccumulata - Egenerata
(II.3.1)
L’energia totale posseduta da un corpo può essere considerata come somma di due energie: una a
livello microscopico posseduta dalle particelle costituenti la materia, come ad esempio energia
cinetica di traslazione, di rotazione intorno al nucleo e intorno al proprio asse degli elettroni o
energia potenziale delle particelle dovute a forza coulombiane; un’altra a livello macroscopico
connessa al corpo nel suo insieme, come ad esempio l’energia potenziale dovuta al campo
gravitazionale terrestre.
La somma di tutte le energie a livello microscopico è detta energia interna del sistema e si è visto
da relazioni sperimentali che essa ha delle relazioni con altre proprietà termostatiche. L’energia
interna è quindi essa stessa una proprietà termostatica.
Supponendo che il sistema chiuso sia in quiete, non avremo variazioni di energia cinetica e
gravitazionale a livello macroscopico e quindi l’energia accumulata si riduce alla sola energia
interna. Per quanto detto e per la convenzione sui segni, il 1° principio si può scrivere così:
Q - L = ∆u
(II.3.2)
avendo considerato le grandezze specifiche e avendo indicato con L il lavoro specifico in un
sistema chiuso.
La precedente relazione può essere scritta anche per una trasformazione infinitesima:
δQ − δL = du
(II.3.3)
Se lo scambio di lavoro con l’esterno si ha solo per variazioni di volume con una trasformazione
reversibile possiamo scrivere:
δQ − pdv = du
(II.3.4)
Consideriamo adesso un sistema aperto all’interno del quale evolve un fluido avente una portata
& e velocità c. Per il sistema aperto si dovrà considerare come lavoro anche quello fatto
massica m
& ⋅ dt per spostarlo di una quantità
dal fluido che segue l’elemento generico di massa dm = m
dx = c ⋅ dt ; detta Ω l’area della sezione attraversata dall’elemento di fluido e p la sua pressione,
questo lavoro può essere espresso come:
3
Lp =
(p ⋅ Ω ) ⋅ (c ⋅ dt ) = p ⋅ V& ⋅ dt = p ⋅ v ⋅ m& ⋅ dt = p ⋅ v
dm
dm
dm
(II.3.5)
& = Ω ⋅ c la
avendo considerato ancora una volta le grandezze specifiche e avendo indicato con V
portata volumetrica di fluido.
Questa grandezza è detta energia di pulsione concordemente alla sua unità di misura che vale:
[L ] = mN
p
2
⋅
m3 N ⋅ m J
=
=
kg kg kg
Per la convenzione sui segni l’energia di pulsione è positiva perché è un lavoro fatto dal fluido
verso l’ambiente esterno. Quindi:
∆u = Q − L = Q − L − (p 2 v 2 − p1 v1 ) = Q − L − ∆(pv )
(II.3.6)
E per una trasformazione elementare:
du = δQ − δL = δQ − δL − d (pv )
(II.3.7)
avendo indicato con δL = δL − d(pv ) il lavoro in un sistema aperto.
Introduciamo ora una grandezza detta entalpia specifica definita dalla relazione:
def
h = u + pv
(II.3.8)
Possiamo notare che l’entalpia è una proprietà termostatica, siccome nella sua espressione di
definizione compaiono solo proprietà termostatiche, ed è una grandezza intensiva.
In base alla (2.3.7) e alla (2.3.8) possiamo riscrivere in questo modo il 1°principio per i sistemi
aperti:
dh = δQ − δL
(II.3.9)
Nel caso in cui si abbia solo lavoro di variazione di volume con una trasformazione reversibile:
δL = δL − d (pv ) = pdv − vdp − pdv = − vdp
(II.3.10)
e quindi possiamo scrivere per la (2.3.9):
dh = δQ + vdp
II.4)
(II.3.11)
Calore specifico. Alcune particolari trasformazioni.
Si definisce calore specifico (questa è una terminologia impropria perché non è una grandezza
specifica) la quantità di calore per unità di massa scambiata tra sistema e ambiente che produce una
variazione unitaria della temperatura del sistema:
δQ
c=
(II.4.1)
dT
4
Consideriamo ora una trasformazione isocora, ovvero a volume costante, per un sistema chiuso.
Supponendo che il lavoro sia scambiato solo per variazione di volume abbiamo, dal primo
principio:
(II.4.2)
du = δQ = c v dT
dove si è indicato con c v =
∂u
∂T
il calore specifico a volume costante.
v = cost.
Se invece consideriamo una trasformazione isobara, ovvero a pressione costante, per un sistema
chiuso:
dh = δQ = c p dT
(II.4.3)
dove si è indicato con c p =
∂h
∂T
il calore specifico a pressione costante.
p = cost.
In generale cv e cp sono funzione sia della pressione che della temperatura assoluta, ma la
dipendenza dalla pressione si può in genere trascurare.
Differenziando la relazione che definisce l’entalpia si ottiene:
dh = du + d(pv )
e tenendo presenti le definizioni di cv e cp:
c p dT = c v dT + d(pv )
(II.4.4)
Se poi consideriamo un gas perfetto per il quale vale l’equazione di stato:
pv = RT
(II.4.5)
e la sostituiamo nella (2.4.4) otteniamo:
c p dT = c v dT + d(RT )
R = cp − cv
(II.4.6)
che è detta relazione di Mayer per i gas perfetti.
La costante R dipende dal tipo di gas e si può ricavare dalla relazione:
R=
nella quale R 0 = 8.314
esame espresso in
R0
M
(II.4.7)
J
è la costante universale dei gas e M il peso molecolare del gas in
kgmol ⋅ K
kg
.
kgmol
5
II.5)
Entropia. Piani termodinamici.
Abbiamo visto precedentemente che lavoro e calore non sono differenziali esatti. Consideriamo un
sistema chiuso con modalità di scambio di lavoro solo attraverso variazioni di volume e vediamo se
esiste un fattore ξ che moltiplicato per δQ renda quest’ultimo un differenziale esatto:
δQ = du + pdv
δQ = c v dT + pdv
ξ ⋅ δQ = ξ ⋅ c v dT + ξ ⋅ pdv
se consideriamo come funzione ξ:
ξ=
1
T
si ottiene:
dv
dT
δQ
= cv
+ p⋅
T
T
T
e nel caso in cui il fluido contenuto all’interno del sistema sia un gas perfetto dalla (2.4.5):
dv
dT
δQ
= cv ⋅
+R⋅
v
T
T
(II.5.1)
Ma da questa relazione vediamo che la forma differenziale è integrabile e quindi la grandezza
δQ
T
è
un differenziale esatto.
Questa grandezza, che per come è definita risulta essere una grandezza di stato, è detta entropia
specifica. La definizione ora data è valida per trasformazioni internamente reversibili:
def
ds rev =
δQ
T
(II.5.2)
Per una trasformazione adiabatica reversibile sarà allora ds = ds rev + ds irr = 0 mentre per una
trasformazione adiabatica reale avremo sempre ds = ds rev + ds irr = ds irr > 0 .
Dalla (2.5.2) si ottiene la 1a relazione di Gibbs:
ds =
dv
du
+p
T
T
(II.5.3)
ricordando invece la (2.3.8) e sostituendo nella (2.5.3) si ottiene la 2a relazione di Gibbs:
ds =
dp
dh
−v
T
T
(II.5.4)
6
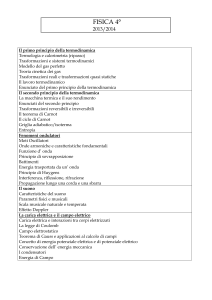
Con i piani termodinamici è molto comodo studiare le trasformazioni e in particolare i cicli
termodinamici.
Le relazioni relative al lavoro di variazione di volume nel caso di sistemi chiusi e di sistemi aperti
trovano una semplice rappresentazione nel diagramma di stato pressione-volume specifico detto
piano di Clapeyron o piano (p,v).
p
pB
pA
|L|
B
A
L
vA
vB
v
Nel caso di sistema chiuso avremo:
δL = pdv
vB
(II.5.5)
L = ∫ pdv
vA
Invece per un sistema aperto avremo:
δL = − vdp
pB
L = − ∫ vdp
L =
pA
pB
∫ vdp
(II.5.6)
pA
Le relazioni relative alla definizione di entropia possono essere efficacemente rappresentate nel
piano temperatura assoluta-entropia specifica detto piano di Gibbs o piano (T,s).
T
B
A
Q
sA
sB
s
Per una trasformazione internamente reversibile avremo:
7
δQ = Tds
sB
(II.5.7)
Q = ∫ Tds
sA
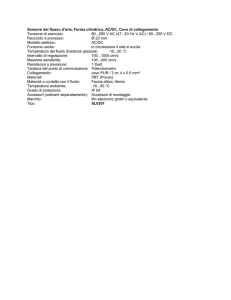
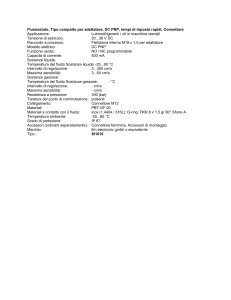
Il diagramma (T,s) è molto usato, soprattutto per considerazioni qualitative. Nella figura seguente è
riportato schematicamente quello relativo all’H2O:
T
C
x=0
A
p=cost
x=1
Vapore
surriscaldato
Vapore
saturo
Liquido
saturo
B
s
La curva A-C rappresenta la curva limite inferiore, luogo dei punti rappresentativi dei liquidi saturi
(ovvero x=0). La curva C-B rappresenta invece la curva limite superiore, luogo dei punti
rappresentativi dei vapori saturi (ovvero con x=1).
Ricordiamo che per una sostanza che presenta due fasi in equilibrio il titolo x è il rapporto tra la
massa di vapore saturo presente nella miscela e la massa totale:
x=
m vapore saturo
(II.5.8)
m totale
Segue che più è grande il titolo, più diminuisce nella miscela liquido-vapore la massa della fase
liquida.
Il punto C, massimo della curva a campana, è detto punto critico ed è caratteristico di ogni sostanza.
Al di sopra della temperatura del punto critico non può esistere la fase liquida di tale sostanza.
E’ da rimarcare che, in pratica, tutte le isobare coincidono lungo la curva limite inferiore e quindi
quest’ultima è rappresentativa, oltre che del liquido saturo, anche del liquido non saturo.
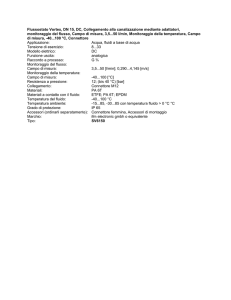
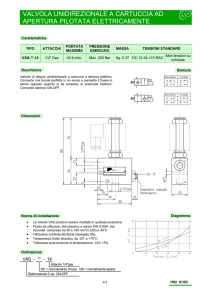
Il diagramma di stato più utilizzato nel campo degli impianti termici motori per il calcolo di
proprietà termostatiche di aeriformi e di vapori saturi a titolo molto alto è il diagramma (h,s) o
diagramma di Mollier. Qui di seguito si riporta il diagramma schematico (h,s) per l’H2O:
p=cost
h
x=1
T=cost
C
B
x=cost
x=0
A
s
8
La curva A-C rappresenta la curva dei liquidi saturi e, anche in questo caso, è praticamente il luogo
dei punti del liquido non saturo. All’interno della curva a campana le isobare sono dei segmenti di
retta e in ogni punto hanno pendenza uguale alla temperatura assoluta T.
II.6)
2° Principio Della Termodinamica. Ciclo di Carnot.
Per semplicità sarà seguita l’enunciazione delle leggi fisiche seguendo un’impostazione
fenomenologia generalizzando per via induttiva le osservazioni sperimentali. Ciò si discosta dagli
attuali corsi di Fisica Tecnica che seguono un’impostazione assiomatica del secondo principio.
Pertanto il 2° Principio della Termodinamica si esprime attraverso due enunciati storici, fra di loro
equivalenti.
Enunciato di Clausius: è impossibile realizzare una trasformazione termodinamica il cui unico
risultato sia quello di far passare calore da un corpo a temperatura inferiore ad un corpo a
temperatura superiore.
Enunciato di Kelvin-Planck: è impossibile realizzare una trasformazione termodinamica il cui unico
risultato sia quello di assorbire calore da una sola sorgente e di trasformarlo integralmente in lavoro.
Dall’enunciato di Kelvin-Planck si evince subito che la più semplice delle macchine motrici
termiche realizzabili opera con due sorgenti termiche.
Q1
Motore
termico
L
Q2
La macchina preleva una quantità di calore Q1 dall’esterno cedendola al suo fluido di lavoro.
Questo fluido è fatto poi espandere cedendo del lavoro all’esterno. Affinché la trasformazione di
calore in lavoro avvenga con continuità è necessario poi che la macchina faccia seguire al fluido un
ciclo termodinamico. Dovremo allora riportare il fluido nelle condizioni iniziali operando una
sottrazione di calore Q2.
T
2
Q1
1
Q2
s
Per il 1° Principio della Termodinamica possiamo scrivere:
∆U = Q1 − Q 2 − L = 0
perché il fluido ritorna nelle condizioni iniziali. Dunque risulta:
L = Q1 − Q 2
9
Il rendimento del ciclo vale:
η=
L Q1 − Q 2
Q
= 1− 2
=
Q1
Q1
Q1
(II.6.1)
Nel caso in cui le trasformazioni 1-2 e 2-1 siano internamente reversibili possiamo ricavare le
espressioni delle quantità di calore:
s2
Q1 = ∫ Tds
s1
s1
Q 2 = ∫ Tds
s2
La più semplice fra le macchine motrici termiche è quella che segue un ciclo di Carnot.
T1
Q1
Sistema
L
Q2
T2
Il sistema preleva una quantità Q1 di energia termica da un serbatoio di energia termica a
temperatura T1 con una trasformazione isoterma reversibile. Il fluido cede poi una quantità di lavoro
L all’esterno mediante una trasformazione adiabatica reversibile e una quantità di calore Q2
mediante una nuova trasformazione isoterma reversibile ad un serbatoio di energia termica a
temperatura T2.
Le trasformazioni anzidette possono essere rappresentate nel piano (T,s):
T
T1
T2
A
B
D
C
E
∆s
F s
Q1 = A ABFE = T1 ⋅ ∆s
Q 2 = A CDEF = T2 ⋅ ∆s
L = Q1 − Q 2 = A ABCD = (T1 − T2 ) ⋅ ∆s
10
Pertanto il rendimento del ciclo di Carnot è uguale a:
Q − Q 2 T1∆s − T2∆s T1 − T2
T
ηC = 1
= 1− 2
=
=
Q1
T1∆s
T1
T1
(II.6.2)
Questo rendimento è il migliore ipotizzabile per qualunque macchina termica che operi
ciclicamente tra le stesse temperature. Infatti seguendo un ciclo di Carnot riesco ad assorbire la
maggiore quantità possibile di calore Q1 a parità di ∆s e a cederne la minima possibile Q2.
II.7)
Temperature medie di adduzione e sottrazione di calore.
Consideriamo una generica trasformazione reversibile che porta il fluido dalle condizioni A di
equilibrio termodinamico alle condizioni B, ancora di equilibrio termodinamico.
T
B
Tma
A
Q1
∆s
s
La quantità di calore scambiato in questa trasformazione vale:
B
Q1 = ∫ Tds = Tma ⋅ ∆s
A
per il teorema della media. La temperatura Tma è detta temperatura media di adduzione di calore:
Tma =
Q1
∆s
(II.7.1)
Allo stesso modo, consideriamo una trasformazione reversibile che porta il fluido dalle condizioni
B alle condizioni A.
T
B
Tms
A
Q2
∆s
s
Anche in questo caso potremo calcolare il calore scambiato durante la trasformazione:
11
A
Q 2 = ∫ Tds = Tms ⋅ ∆s
B
La temperatura Tms è detta temperatura media di sottrazione del calore:
Tms =
Q2
∆s
(II.7.2)
Se ora consideriamo un ciclo generico le cui trasformazioni siano reversibili, possiamo facilmente
dimostrare che il suo rendimento è lo stesso di quello di un ciclo di Carnot che evolve tra le
temperature Tma e Tms :
η=
T
Q1 − Q 2 Tma ∆s − Tms ∆s Tma − Tms
=
=
= 1 − ms
Q1
Tma ∆s
Tma
Tma
(II.7.3)
Ogni ciclo per quanto complicato sia si può ricondurre ad un ciclo di Carnot tra Tms e Tma
Il ciclo termodinamico seguito dal fluido si discosterà alquanto da quello teorico, come si può
vedere dalla figura:
T
T1
T2
∆Τ A
D
B
C
s
Questo avviene sempre nelle macchine reali perché non è possibile effettuare trasformazioni
reversibili. Tali trasformazioni sono infatti necessariamente quasi statiche, ovvero si compiono in
un tempo infinito. Nelle macchine reali avverranno invece delle trasformazioni reali che
comportano sempre una produzione entropica. Per esempio potremo scambiare calore con una
sorgente solo sotto una differenza ∆T finita di temperatura e quindi il fluido non si porterà mai alla
temperatura di detta sorgente.
Inoltre l’espansione del fluido non potrà avvenire secondo un’adiabatica isoentropica. A causa degli
effetti dissipativi, l’espansione seguirà una trasformazione che possiamo ancora ritenere adiabatica
ma che darà un aumento di entropia.
Queste produzioni di entropia dovranno essere riassorbite per riportare il fluido nelle condizioni
iniziali e ciò comporta una sottrazione di una maggiore quantità di calore Q2.
Il rendimento di una macchina reale sarà allora certamente inferiore al rendimento di Carnot.
Per avere elevati rendimenti bisogna effettuare trasformazioni che si discostino il meno possibile da
trasformazioni reversibili fornendo calore alla più elevata temperatura che riusciamo a realizzare e
sottraendolo alla più bassa consentita.
12
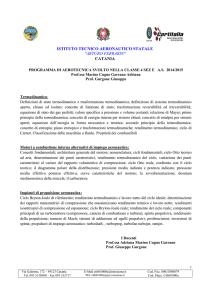
Effettuiamo un confronto tra diversi cicli aventi diverse Tma e Tms :
T
1
2
3
4
∆T
∆T
s
Nei casi 2 e 3 il lavoro scambiato è maggiore rispetto al caso 1 perché l’area racchiusa dal ciclo è
maggiore. Tuttavia il rendimento del ciclo 2 è inferiore a quello del ciclo 3 perché la quantità di
calore assorbita Q1, pari all’area sottesa dall’isoterma superiore, è più elevata.
Il ciclo 4 è poi quello che produce il maggior lavoro e ha maggior rendimento. Infatti ha una
temperatura media di sottrazione di calore inferiore al ciclo 2 e una temperatura media di adduzione
di calore più elevata del ciclo 3.
Da quanto esposto capiamo che dobbiamo anzitutto cercare di abbassare il più possibile la
temperatura Tms e di innalzare la Tma . Infatti la temperatura Tma alla quale cediamo il calore Q 1 è
un indice della bontà dell’energia, perché più essa è alta minore è il ∆S dato che Q 1 = Tma ⋅ ∆S;
inoltre più è bassa Tms più è alto il ∆S (Q 2 = Tms ⋅ ∆S), però questa volta il ∆S.
II.8)
Studio e classificazione dei cicli termodinamici.
Per attuare il processo di conversione di energia termica in energia meccanica si realizzano le
seguenti fasi:
1.
2.
3.
4.
energizzazione meccanica del fluido motore;
energizzazione termica del fluido motore;
disenergizzazione meccanica del fluido motore;
disenergizzazione termica del fluido motore.
Queste fasi sono effettuate assoggettando il fluido a delle trasformazioni. Le quattro trasformazioni
nel loro complesso costituiscono il ciclo termodinamico eseguito dal fluido.
Nel caso in cui il ciclo coincida con un ciclo di Carnot le quattro fasi sono:
1. compressione adiabatica isoentropica (energizzazione meccanica);
2. adduzione di calore con trasformazione isoterma (energizzazione termica);
3. espansione adiabatica isoentropica (disenergizzazione meccanica);
4. sottrazione di calore con trasformazione isoterma (disenergizzazione termica).
13
T
(2)
(3)
(1)
(4)
s
Abbiamo già detto che le trasformazioni di questo ciclo sono reversibili e quindi il calore e il lavoro
sono attribuibili solo a scambi con l’ambiente esterno. Dalla relazione (2.3.9):
dh = δQ e − δL e
(II.8.1)
E per una trasformazione reversibile si ha:
δQ e = Tds
(II.5.2)
δL e = − vdp
(II.3.10)
Sostituendo la (2.5.2) e la (2.3.10) nella (2.8.1) si ha:
dh = Tds + vdp
(II.8.2)
Questa relazione, ricavata analiticamente per trasformazioni reversibili, è valida in generale.
Consideriamo infatti un fluido che evolve in un condotto fisso e adiabatico. In queste ipotesi è:
δQ e = δL e = 0
e per il 1° Principio della Termodinamica:
dh = 0
Se il fluido è reale avrà una sua viscosità e, a causa degli attriti, dovrà spendere parte della propria
energia meccanica per attraversare il condotto. Queste perdite di carico si manifestano con un
decremento di pressione del fluido dall’ingresso all’uscita del condotto. Possiamo quindi attribuire
questo scambio di energia meccanica allo stesso modo di prima:
δL e + δL a = − vdp
Inoltre vi sarà una produzione di calore all’interno del fluido per opera degli attriti che causerà un
aumento di entropia del fluido:
δQ e + δQirr = Tds
Sostituendo nella (2.3.9) si ottiene:
14
− δL a = δQirr
(II.8.3)
Dalla (2.8.3) si desume che il fluido ha peggiorato le proprie caratteristiche per attraversare il
condotto perché ha convertito parte della propria energia meccanica (energia di “qualità”) in calore
(energia “degradata”) per vincere le forze di attrito.
Da quanto esposto si evince che possiamo studiare i cicli termodinamici con più gradi di
approssimazione, sia per il fluido di lavoro, sia per le trasformazioni cui il fluido stesso è
sottoposto:
Ciclo ideale
Ciclo limite
Ciclo reale
Fluido
Ideale
Reale
Reale
Macchina
Ideale
Ideale
Reale
Nello studio del ciclo ideale si fa l’ipotesi che il fluido abbia un comportamento da gas
piuccheperfetto e che le macchine siano in grado di eseguire trasformazioni reversibili.
Nel ciclo limite si considera il fluido nel suo reale comportamento, ovvero con le proprietà
termostatiche dipendenti dalla temperatura, mentre si continuano a considerare le macchine ideali.
Possiamo dire che questo ciclo rappresenta il limite tecnologico al quale si può giungere
perfezionando la costruzione delle macchine.
Aumentando il grado di precisione si possono considerare sia il fluido che le macchine nel loro
comportamento reale e studiare quindi il ciclo reale.
Il rendimento globale di un impianto termico è dato dal rapporto tra il lavoro utile all’asse del
motore Lua e la quantità di calore che può rilasciare il combustibile:
ηg =
L ua
mc Hi
(I.4.1)
Quando dobbiamo riscaldare il fluido per la sua energizzazione termica abbiamo necessità di
bruciare un combustibile. La combustione non avverrà certamente secondo una reazione ideale e
quindi parte del calore disponibile andrà perduto. Infatti vi saranno certamente allo scarico dei gas
incombusti e avverrà la dissociazione dell’anidride carbonica. Inoltre i fumi inviati al camino
possiedono ancora una certa quantità di calore che non è sfruttata per il riscaldamento del fluido.
Definiamo allora un rendimento di combustione dato dal rapporto tra la quantità di calore Q1 che si
riesce a cedere al fluido e il calore ottenuto dalla massa di combustibile che è bruciato:
ηb =
Q1
mcHi
(II.8.4)
Il fluido segue poi un determinato ciclo termodinamico che, come abbiamo visto, è caratterizzato da
un ciclo limite che avrà un proprio rendimento limite:
ηl =
L ul
Q1
(II.8.5)
Sarebbe certamente auspicabile che nella realtà il fluido seguisse perfettamente il ciclo limite.
Abbiamo visto però che ciò è realizzabile solo costruendo delle macchine ideali, in grado cioè di
realizzare trasformazioni reversibili. Invece il fluido seguirà un ciclo reale e si potrà pertanto
15
definire un rendimento reale uguale al rapporto tra il lavoro effettivamente scambiato durante il
ciclo e la quantità di calore assorbita dal fluido:
L ur
Q1
ηr =
(II.8.6)
Si potrà allora introdurre un nuovo indice che fa comprendere quanto il ciclo reale si avvicina a
quello limite. Questo indice è di carattere prettamente tecnologico siccome ci fa capire quanto le
macchine adoperate si avvicinano alle condizioni ideali di funzionamento.
Per questo esso è detto rendimento interno:
ηi =
L ur ηr
=
L ul ηl
(II.8.7)
Tuttavia il lavoro Lur è quello disponibile sul primo organo in movimento della macchina motrice,
per esempio sulle palette di una turbina. Questa avrà certamente il rotore calettato su di un asse e vi
saranno delle perdite meccaniche dovute all’attrito sui cuscinetti o all’azionamento dei servizi
ausiliari. Perciò è possibile definire un rendimento meccanico dato da:
ηm =
L ua
L ur
(II.8.8)
A questo punto, dal momento che abbiamo separato tutti i processi che conducono alla
determinazione del rendimento reale, è facile verificare che:
ηg =
L ua
Q1 L ul L ur L ua
=
⋅
⋅
⋅
= η b ⋅ η l ⋅ ηi ⋅ η m
m c H i m c H i Q1 L ul L ur
(II.8.9)
E’ anche possibile esprimere il rendimento globale impiegando la (2.8.7):
ηg = η b ⋅ η r ⋅ η m
(II.8.10)
E’ bene osservare che il rendimento globale del ciclo è limitato essenzialmente dal rendimento reale
perché esso è dato dal rapporto tra energie di tipo diverso. Abbiamo infatti una forte limitazione
dalla termodinamica ogni volta che vogliamo trasformare dell’energia di minore qualità (calore) in
una di migliore qualità (energia meccanica).
Il ciclo reale potrà al più raggiungere il ciclo limite e questo potrà essere conseguito migliorando il
livello tecnologico delle macchine costituenti l’impianto. Questo vuol dire che il rendimento interno
può tendere all’unità, compatibilmente con il fatto che è data dal rapporto di due energie
meccaniche.
Il rendimento limite potrà essere migliorato modificando opportunamente il ciclo ma esso, in ogni
caso, sarà inferiore del rendimento di un ciclo di Carnot che evolve tra le stesse temperature.
Proprio il ciclo di Carnot è limitato dalle temperature massime e minime a cui si può lavorare ed è
chiaro che, considerando tutte le limitazioni enunciate, i rendimenti reali degli impianti termici
siano così bassi.
Per quanto riguarda il rendimento di combustione possiamo dire che esso aumenta migliorando il
processo di combustione, mentre il rendimento meccanico aumenta lubrificando meglio le superfici
di contatto tra gli organi in movimento.
16