Cos'è un sistema operativo?
Definizione:
Un sistema operativo è un programma che controlla l'esecuzione di
programmi applicativi e agisce come interfaccia tra le applicazioni e
l'hardware del calcolatore
Obiettivi
Efficienza:
Un S.O. cerca di utilizzare in modo efficiente le risorse del calcolatore
Semplicità:
Un sistema operativo dovrebbe semplificare l'utilizzazione
dell'hardware di un calcolatore
1
Visione: S.O. come gestore di risorse
Alcune osservazioni:
Gestendo le risorse di un calcolatore, un S.O. controlla il
funzionamento del calcolatore stesso...
... ma questo controllo è esercitato in modo "particolare"
Normalmente:
Il meccanismo di controllo è esterno al sistema controllato
(esempio: termostato e impianto di riscaldamento)
In un elaboratore:
Il S.O. è un programma, simile all'oggetto del controllo, ovvero le
applicazioni controllate
Il S.O. deve lasciare il controllo alle applicazioni e affidarsi al
processore per riottenere il controllo
2
Visione: S.O. come macchina estesa
Visione "a strati" delle componenti hardware/software che
compongono un elaboratore:
Utente
Programmi
applicativi
Programmatore
di sistema
Librerie
Programmi
di sistema
Sistemista
Tool di sistema
Progettista
di S.O.
Sistema operativo
Computer hardware
3
Visione: S.O. come macchina estesa
Un sistema operativo:
nasconde ai programmatori i dettagli dell'hardware fornendogli
una API conveniente e facile da usare
agisce come intermediario tra programmatore e hardware
Parole chiave:
Indipendenza dall'hardware
Comodità d'uso
Programmabilità
4
Visione 2: S.O. come macchina estesa
Servizi estesi offerti da un S.O.:
esecuzione di programmi
accesso semplificato ai dispositivi di I/O
accesso controllato a dispositivi, file system, etc.
accounting ed accesso al sistema
rilevazione e risposta agli errori
...
5
Storia dei Sistemi Operativi
L'evoluzione dei sistemi operativi
è stata spinta dal progresso tecnologico dell'hardware
ha guidato il progresso tecnologico dell'hardware
Esempio:
Gestione degli interrupt
Protezione della memoria
Memoria virtuale
....
6
Storia dei Sistemi Operativi
Generazione 1: 1945 - 1955
Generazione 2: 1955 - 1965
transistor e sistemi batch
Generazione 3: 1965 – 1980
valvole e tavole di commutazione
circuiti integrati, multiprogrammazione e time-sharing
Generazione 4: 1980 – oggi
personal computer
7
Generazione 0
Babbage (1792-1871)
Cerca di costruire la macchina analitica (programmabile, meccanica)
Non aveva sistema operativo
La prima programmatrice della storia e' Lady Ada Lovelace (figlia del
poeta Lord Byron)
8
Generazione 1 (1944-1955)
Come venivano costruiti?
Come venivano usati?
solo calcoli numerici (calcolatori non elaboratori)
un singolo gruppo di persone progettava, costruiva, programmava e
manuteneva il proprio computer
Come venivano programmati?
macchine a valvole e tavole di commutazione
in linguaggio macchina
programmazione su tavole di commutazione
non esisteva il concetto di assembler!
Quale sistemi operativi venivano usati?
nessuno!
9
Generazione 1 (1944-1955)
Principali problemi
grossi problemi di affidabilità (guasti frequenti)
rigidità nell'assegnazione dei ruoli;
non esiste il concetto di programmatore come entità separata dal
costruttore di computer e dall'utente
utilizzazione lenta e complessa; l'operatore doveva:
1. caricare il programma da eseguire
2. inserire i dati di input
3. lanciare l'esecuzione del programma
4. attendere il risultato
5. ricominciare dal punto 1.
tutto ciò a causa dell'assenza del sistema operativo
10
Generazione 1 (1944-1955)
Frasi celebri
Nel futuro i computer arriveranno a pesare non più di una tonnellata e
mezzo (Popular Mechanics, 1949)
Penso che ci sia mercato nel mondo per non più di cinque computer
(Thomas Watson, chairman di IBM, 1943)
Ho girato avanti e indietro questa nazione (USA) e ho parlato con la
gente. Vi assicura che questa moda dell'elaborazione automatica non
vedrà l'anno prossimo (Editor di libri scientifici di Prentice Hall, 1947)
11
Generazione 2 (1955-1965)
Come venivano costruiti?
introduzione dei transistor
costruzione di macchine più affidabili ed economiche
Come venivano usati?
le macchine iniziano ad essere utilizzate per compiti diversi
si crea un mercato, grazie alle ridotte dimensioni e al prezzo più
abbordabile
avviene una separazione tra costruttori, operatori e programmatori
Come venivano programmati?
Assembly e primi linguaggi ad "alto livello" (Fortran,..)
tramite schede perforate
Quale sistemi operativi venivano usati?
sistemi operativi batch
12
Generazione 2 (1955-1965)
Definizione: job
con job si indica il generico programma utente
Ciclo di esecuzione di un job:
il programmatore
scrive (su carta) un programma in un linguaggio ad alto livello
perfora una serie di schede registrandovi il programma ed i dati di input
consegna le schede ad un operatore
l'operatore
inserisce schede di controllo scritte in JCL
inserisce il pacco di schede del programma
attende il risultato e lo consegna al programmatore
Nota: operatore != programmatore == utente
13
Generazione 2 (1955-1965)
Sistema operativo
primi rudimentali esempi di sistema operativo, detti anche monitor
residenti:
controllo iniziale al monitor
il controllo viene ceduto al job corrente
una volta terminato il job, il controllo ritorna al monitor
il monitor residente è in grado di eseguire una sequenza di job,
trasferendo il controllo dall'uno all'altro
Detti anche sistemi batch ("infornata")
14
Generazione 2 (1955-1965)
Job Control Language (JCL-FMS)
(da una lezione di A.S. Tanenbaum)
15
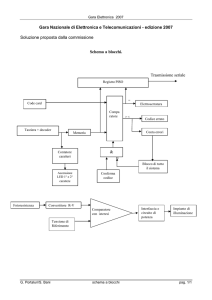
Generazione 2 (1955-1965)
Memory layout per un s.o. batch (versione semplificata)
S.O.
(monitor)
Memoria
vuota
1. Stato iniziale
S.O.
(monitor)
S.O.
(monitor)
Compilatore
Fortran
Programma
in esecuzione
Memoria
vuota
Memoria
vuota
2. Dopo il caricamento
del compilatore fortran
3. Dopo la
compilazione
16
Generazione 2 (1955-1965)
Principali problemi
Molte risorse restavano inutilizzate:
durante le operazioni di lettura schede / stampa, durante il
caricamento di un nuovo job, il processore restava inutilizzato
parte della memoria restava inutilizzata
Primo miglioramento (ma non una soluzione)
caricamento di numerosi job su nastro (off-line)
elaborazione (output su nastro)
stampa del nastro di output (off-line)
17
Generazione 2 (1955-1965)
(da una lezione di A.S. Tanenbaum)
18
Generazione 3 (1965-1980)
Come venivano costruiti?
Come venivano usati?
man mano sparisce la figura dell'operatore come "interfaccia" degli utenti
verso la macchine
utente == operatore
Come venivano programmati?
circuiti integrati
linguaggi ad "alto livello": C, shell scripting
editor testuali, editor grafici, compilatori
accesso al sistema da terminali
Quale sistemi operativi venivano usati?
non più batch ma interattivi
multi-programmazione
time sharing
19
Generazione 3 - Multiprogrammazione
Definizione: multiprogrammazione
utilizzare il processore durante i periodi di I/O di un job per eseguire
altri job
Vantaggi
il processore non viene lasciato idle durante operazioni di I/O molto
lunghe
la memoria viene utilizzata al meglio, caricando il maggior numero di
job possibili
Nota
per gestire la multiprogrammazione, il s.o. deve gestire un pool
("insieme") di job da eseguire, fra cui alternare il processore
Simultaneous Peripheral Operation On-line (SPOOL)
ad esempio: print spooler
20
Generazione 3 - Multiprogrammazione
Caratteristiche tecniche:
Più job contemporaneamente in
memoria
S.O.
Una componente del s.o. detto
scheduler si preoccupa di alternarli
nell'uso della CPU
Job 1
quando un job richiede un'operaz.
di I/O, la CPU viene assegnata ad
un altro job.
Job 2
Job 3
Job 4
21
Generazione 3 - Multiprogrammazione
Esecuzione
CPU
Richiesta di I/O
Richiesta di I/O
I/O Completato
Richiesta di I/O
I/O Completato
22
Generazione 3 - Multiprogrammazione
S.O. multiprogrammati: quali caratteristiche?
routine di I/O devono essere fornite dal s.o.
gestione della memoria
CPU scheduling
il sistema deve allocare la memoria per i job multipli presenti
contemporaenamente
il sistema deve scegliere tra i diversi job pronti ad eseguire
allocazione delle risorse di I/O
Il sistema operativo deve essere in grado di allocare le risorse di I/O
fra diversi processi
23
Generazione 3 - Time-sharing
Definizione - Time sharing
E’ l’estensione logica della multiprogrammazione
L'esecuzione della CPU viene suddivisa in un certo numero di quanti
temporali
Allo scadere di un quanto, il job corrente viene interrotto e l'esecuzione
passa ad un altro job
anche in assenza di richieste di I/O
I passaggi (switch) avvengono così frequentemente che più utenti
possono interagire con i programmi in esecuzione
24
Generazione 3 - Time-sharing
Esecuzione
CPU
Context switch
Context switch
Context switch
Context switch
Context switch
Context switch
Context switch
Context switch
Context switch
25
Generazione 3 - Time-sharing
S.O. time-sharing: quali caratteristiche?
Gestione della memoria
CPU Scheduling
Il numero di programmi eseguiti dagli utenti può essere molto grande;
si rende necessario la gestione della memoria virtuale
Lo scheduling deve essere di tipo preemptive o time-sliced, ovvero
sospendere periodicamente l’esecuzione di un programma a favore di
un altro
Meccanismi di protezione
La presenza di più utenti rende necessari meccanismi di protezione
(e.g. protezione nel file system, della memoria, etc.)
26
Generazione 3 - Storia
Compatible Time-Sharing System (CTSS) (1962)
introdusse il concetto di multiprogrammazione
introdusse il concetto di time-sharing
Multics (1965)
introduzione del concetto di processo
Unix (1970)
derivato da CTSS e da Multics
sviluppato inizialmente ai Bell-labs su un PDP-7
riscritto in linguaggio C per renderlo portabile
27
Generazione 4 (1980- ) - Personal computer
Ancora una frase celebre
Non c’è ragione per cui qualcuno possa volere un computer a casa
sua (Ken Olson, fondatore di Digital, 1977)
Punti chiave
I personal computer sono dedicati a singoli utenti
L’obiettivo primario diventa la facilità d’uso
Essendo dedicati a singoli utenti, i sistemi operativi per PC sono in
generale più semplici
Tecnologie a finestre
Tuttavia, tecnologie sviluppate per sistemi operativi più complessi
possono essere adottate
28
Sistemi paralleli
Definizione - Sistema parallelo
un singolo elaboratore che possiede più unità di elaborazione
Si dicono anche sistemi tightly coupled
alcune risorse contenute nell'elaboratore possono essere condivise
esempio: memoria
la comunicazione avviene tramite memoria condivisa o canali di
communicazione dedicati
Vantaggi dei sistemi paralleli
incremento delle prestazioni
incremento dell’affidabilità (graceful degradation)
29
Sistemi paralleli
Tassonomia basata sulla struttura
SIMD - Single Instruction, Multiple Data
Le CPU eseguono all'unisono lo stesso programma su dati diversi
MIMD - Multiple Instruction, Multiple Data
Le CPU eseguono programmi differenti su dati differenti
Tassonomia basata sulla dimensione
A seconda del numero (e della potenza) dei processori si suddividono
in
sistemi a basso parallelismo
pochi processori in genere molto potenti
sistemi massicciamente paralleli
gran numero di processori, che possono avere anche potenza non
elevata
30
Sistemi paralleli
Symmetric multiprocessing (SMP)
Ogni processore esegue una copia identica del sistema operativo
Processi diversi possono essere eseguiti contemporaneamente
Molti sistemi operativi moderni supportano SMP
Asymmetric multiprocessing
Ogni processore è assegnato ad un compito specifico; un processore
master gestisce l’allocazione del lavoro ai processori slave
Più comune in sistemi estremamente grandi
31
Sistemi distribuiti
Definizione - Sistema distribuito
Sono sistemi composti da più elaboratori indipendenti (con proprie
risorse e proprio sistema operativo)
Si dicono anche sistemi loosely coupled
Ogni processore possiede la propria memoria locale
I processori sono collegati tramite linee di comunicazione (rete, linee
telefoniche, wireless, etc)
Vantaggi dei sistemi distribuiti
Condivisione di risorse
Suddivisione di carico, incremento delle prestazioni
Affidabilità
Possibilità di comunicare
32
Sistemi distribuiti
Sistemi operativi di rete
forniscono condivisione di file
forniscono la possibilità di comunicare
ogni computer opera independentemente dagli altri
Sistemi operativi distribuiti
minore autonomia tra i computer
dà l’impressione che un singolo sistema operativo stia controllando la
rete
33
Sistemi real-time
Definizione: sistemi real-time
Sono quei sistemi per i quali i risultati sono considerati validi solo se
corretti ed ottenuti entro e non oltre un dato istante (tempo utile)
34
Sistemi real-time
I sistemi real-time si dividono in:
hard real-time:
se il mancato rispetto dei vincoli temporali può avere effetti catastrofici
e.g. controllo assetto velivoli, controllo centrali nucleari,
apparecchiature per terapia intensiva
soft real-time:
se si hanno solamente disagi o disservizi
e.g. programmi interattivi
N.B.
real-time non significa necessariamente esecuzione veloce
35
Lo "zoo" dei sistemi operativi
Mainframe operating systems
Server operating systems
Multiprocessor operating systems
Personal computer operating systems
Network operating systems
Distributed operating systems
Real-time operating systems
Embedded operating systems
Smart card operating systems
36
Architettura dei sistemi operativi
Cos'è l'architettura di un sistema operativo?
descrive quali sono le varie componenti del s.o. e come queste sono
collegate fra loro
i vari sistemi operativi sono molto diversi l'uno dall'altro nella loro
architettura
la progettazione dell'architettura è un problema fondamentale
L'architettura di un s.o. da diversi punti di vista:
servizi forniti
(visione utente)
interfaccia di sistema
(visione programmatore)
componenti del sistema
(visione progettista s.o.)
38
Componenti di un sistema operativo
Gestione dei processi
Gestione della memoria principale
Gestione della memoria secondaria
Gestione file system
Gestione dei dispositivi di I/O
Protezione
Networking
39
Gestione dei processi
Un processo è un programma in esecuzione
Un processo utilizza le risorse fornite dal computer per assolvere i
propri compiti
Il sistema operativo è responsabile delle seguenti attività
riguardanti la gestione dei processi:
creazione e terminazione dei processi
sospensione e riattivazione dei processi
gestione dei deadlock
comunicazione tra processi
sincronizzazione tra processi
40
Gestione della memoria principale
La memoria principale
è un "array" di byte indirizzabili singolarmente.
è un deposito di informazioni (dati/istruzioni) facilmente accessibile e
condiviso tra la CPU ed i dispositivi di I/O
Il sistema operativo:
tiene traccia di quali parti della memoria sono usate e da chi
decide quali processi caricare quando diventa disponibile spazio in
memoria
alloca e dealloca lo spazio di memoria quando necessario
41
Gestione della memoria secondaria
Memoria secondaria:
poichè la memoria principale è volatile e troppo piccola per contenere
tutti i dati e tutti i programmi in modo permanente,
un computer è dotato di memoria secondaria
in generale, la memoria secondaria è data da hard disk, dischi ottici,
nastri, etc.
Il sistema operativo è responsabile delle seguenti attività:
allocazione dello spazio inutilizzato
gestione dello spazio di memorizzazione
ordinamento efficiente delle richieste (disk scheduling)
42
Gestione del file system
Un file è l'astrazione informatica di un archivio di dati
il concetto di file è indipendente dal media sul quale viene
memorizzato (che ha caratteristiche proprie e propria organizzazione
fisica)
Un file system è composto da un insieme di file
Il sistema operativo è responsabile delle seguenti attività:
creazione e cancellazione di file
creazione e cancellazione di directory
manipolazione di file e directory
codifica del file system sulla memoria secondaria
43
Gestione dell'I/O
La gestione dell’I/O richiede:
un interfaccia comune per la gestione dei device driver
un insieme di driver per dispositivi hardware specifici
un sistema di gestione di buffer per il caching delle informazioni
44
Protezione
Il termine protezione si riferisce al meccanismo per controllare
gli accessi di programmi, processi o utenti alle risorse del
sistema e degli utenti
Il meccanismo di protezione deve:
Distinguere tra uso autorizzato e non autorizzato
Specificare i controlli che possono essere imposti
Fornire un meccanismo di attuazione della protezione
45
Networking
Consente
di far comunicare due o più elaboratori
di condividere risorse
Quali servizi
protocolli di comunicazione a basso livello
TCP/IP
UDP
servizi di comunicazione ad alto livello
file system distribuiti (NFS, ...)
print spooler
46
Interprete dei comandi
Il S.O. deve fornire un interfaccia utente con cui:
attivare un programma, terminare un programma, etc.
interagire con le componenti del sistema operativo (file system)
Può essere:
grafica (a finestre, icone, etc.)
testuale (linea di comando)
Differenze
cambia il "linguaggio" utilizzato, ma il concetto è lo stesso
vi sono però differenze di espressività
N.B.
L'interprete dei comandi usa i servizi dei gestori di processi,
I/O, memoria principale e secondaria...
47
System call
Interfaccia programmatore - s.o.
Ogni volta che un processo ha bisogno di un servizio del s.o. richiama
una system call
sono in genere disponibili come istruzioni a livello assembler
esistono librerie che permettono di invocare le system call da diversi
linguaggi (ad es. librerie C)
vengono normalmente realizzate tramite interrupt software
48
System call
49
System call
50
System call
Tutti i sistemi operativi hanno le proprie system call
51
Implementazione del file system
Problemi da tenere in considerazione
organizzazione di un disco
allocazione dello spazio in blocchi
gestione spazio libero
implementazione delle directory
tecniche per ottimizzare le prestazioni
tecniche per garantire la coerenza
1
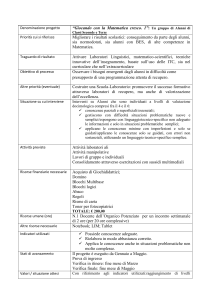
Organizzazione del disco
Struttura di un disco
un disco può essere diviso in una o più partizioni, porzioni
indipendenti del disco che possono ospitare file system distinti
il primo settore dei dischi è il cosidetto master boot record (MBR)
è utilizzato per fare il boot del sistema
contiene la partition table (tabella delle partizioni)
contiene l'indicazione della partizione attiva
Al boot del sistema, il codice memorizzato nel MBR viene letto ed eseguito
MBR
Partizione 1
Partizione 2
Partizione 3
Struttura del disco
2
Organizzazione del disco
Struttura di una partizione
ogni partizione inizia con un boot block
Il codice nel MBR carica il boot block della partizione attiva e lo esegue
Il boot block fornisce invece il codice che carica ed esegue il s.o.
L'organizzazione del resto della partizione dipende dal file system
Boot
Block
Gestione
Gestione Root
Superblock
spazio libero Spazio occ. dir
File e directory
Struttura di una partizione
3
Organizzazione del disco
In generale
superblock
tabelle per la gestione dello spazio libero
struttura dati contenente informazioni sui blocchi liberi
tabelle per la gestione dello spazio occupato
contiene informazioni sui file presenti nel sistema
non presente in tutti i file system
root dir
contiene informazioni sul tipo di file system e sui parametri
fondamentali della sua organizzazione
directory radice (del file system)
file e directory
4
Allocazione
Problema dell'allocazione
Poiché l’hardware e il device driver consentono di accedere al
disco come ad un insieme di blocchi dati di dimensione fissa.
Nasce il problema di come scegliere i blocchi dati da utilizzare
per un file e come questi blocchi dati vengono collegati assieme
a formare una struttura unica
5
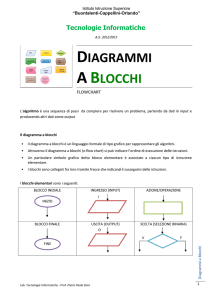
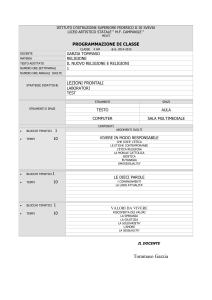
Allocazione contigua
Descrizione
0- 5
6-11
i file sono memorizzati in sequenze
contigue di blocchi di dischi
Vantaggi
12-17
18-23
24-29
30-35
non è necessario utilizzare strutture
dati per collegare i blocchi
l'accesso sequenziale è efficiente
blocchi contigui non necessitano
operazioni di seek
l'accesso diretto è efficiente
block= offset/blocksize;
pos= offset%blocksize;
36-41
directory
Name
Start Size
a
0
4
b
13
11
c
30
3
d
33
3
6
Allocazione contigua
Svantaggi
si ripropongono le stesse problematiche dell’allocazione contigua
in memoria centrale
frammentazione esterna
politica di scelta dell’area di blocchi liberi da usare per
allocare spazio per un file: first fit, best fit, worst fit....
inoltre:
i file non possono crescere!
Quando utilizzare allocazione contigua?
memoria secondaria write-only (CD-ROM, DVD)
7
Allocazione concatenata
Descrizione
ogni file è costituito da un lista concatenata di blocchi.
ogni blocco contiene un puntatore al blocco successivo
il descrittore del file contiene i puntatori al primo e all’ultimo
elemento della lista
3
10
7
nil
0-5
nil
4
5
6
directory
Name
Start End
a
0
4
b
1
6
6-11
spazio allocabile
8
Allocazione concatenata
Vantaggi
risolve il problema della frammentazione esterna
l’accesso sequenziale o in “append mode" è efficiente
Svantaggi
l’accesso diretto è inefficiente
progressivamente l’efficienza globale del file system degrada
(i blocchi sono disseminati nel disco, aumenta il n. di seek)
la dimensione utile di un blocco non è una potenza di due
se il blocco è piccolo (512 byte) l’overhead per i puntatori può
essere rilevante
9
Allocazione concatenata
Per minimizzare l’overhead dovuto ai puntatori
4, 8, 16 blocchi riuniti in cluster vengono allocati in modo indivisibile
Vantaggi
la percentuale di spazio utilizzato per i puntatori diminuisce
Svantaggi
aumenta lo spazio sprecato per la frammentazione interna
10
Allocazione basata su FAT
Descrizione
invece di utilizzare parte del blocco dati per
contenere il puntatore al blocco successivo
si crea una tabella unica con un elemento
per blocco (o per cluster)
spazio allocabile
FAT
3
10
7
nil
6
0-5
nil
4
6-11
directory
Name
Start End
a
0
4
b
1
6
5
11
Allocazione basata su FAT
Vantaggi
i blocchi dati sono interamente dedicati... ai dati
Svantaggi
la scansione richiede anche la lettura della FAT, aumentando
così il numero di accessi al disco.
Ovviamente
potendo fare caching in memoria dei blocchi FAT
l'accesso diretto diventa più efficiente, in quanto la lista di
puntatori può essere seguita in memoria
Il DOS usa l'allocazione basata su FAT
12
Allocazione indicizzata
Descrizione
l'elenco dei blocchi che compongono un file viene memorizzato
in un blocco (o area) indice
per accedere ad un file, si carica in memoria la sua area indice
e si utilizzano i puntatori contenuti
spazio allocabile
directory
Name
Index
a
2
b
8
0-5
6-11
0, 3,
7, 4
2, 10,
5, 6
13
Allocazione indicizzata
Vantaggi
risolve (come l’allocazione concatenata) il problema
dell’allocazione esterna.
è efficiente per l’accesso diretto
il blocco indice deve essere caricato in memoria solo quando il
file è aperto
Svantaggi
la dimensione del blocco indice determina l’ampiezza
massima del file
utilizzare blocchi indici troppo grandi comporta un notevole
spreco di spazio
Come risolvere il trade-off?
14
Allocazione indicizzata - Possibili soluzioni
Concatenazione di blocchi indice
l’ultimo elemento del blocco indice non punta al blocco dati ma
al blocco indice successivo
si ripropone il problema per l’accesso diretto a file di grandi
dimensioni
spazio allocabile
directory
Name
Index
a
0
b
8
0-5
6-11
2, 3,
4, 9
1, 5,
6, nil
7, 10,
11, nil
15
Allocazione indicizzata - Possibili soluzioni
Indice multilivello
si utilizza un blocco indice dei blocchi indice
degradano le prestazioni, in quanto richiede un maggior numero
di accessi
spazio allocabile
directory
Name
Index
a
0
0-5
1,2,
nil,nil
3,4,
7,8
10,11,
nil,nil
6-11
16
Allocazione indicizzata e UNIX
In UNIX
ogni file è associato ad un i-node (index node)
un i-node è una struttura dati contenente gli attributi del file, e
un indice di blocchi diretti e indiretti, secondo uno schema misto
I-node
Attributes
Direct
blocks
...
Data
...
Single indirect
Double indirect
Triple indirect
Data
.
Index .
.
...
Data
Index
...
Data
Data
...
Index
...
Data
Index
17
Allocazione e performance
Lo schema UNIX
garantisce buone performance nel caso di accesso sequenziale
file brevi sono acceduti più velocemente e occupano meno
memoria
Ulteriori miglioramenti
pre-caricamento (per esempio nell’allocazione concatenata
fornisce buone prestazioni per l’accesso sequenziale).
combinazione dell’allocazione contigua e indicizzata
contigua per piccoli file ove possibile
indicizzata per grandi file
18
Gestione spazio libero - Mappa di bit
Descrizione
0
ad ogni blocco corrisponde un bit in una bitmap
i blocchi liberi sono associati ad un bit di valore 0, i blocchi
occupati sono associati ad un bit di valore 1
1
2
3
4
5
f1
6
7
8
9 10 11
f2
12 13
14 15 16 17 18 19 20 21
22 23
f3
1 1 1 1 1 0 0 1
1 1 1 1 0 0 0 0
0 1 1 1 0 0 0 0
19
Gestione spazio libero - Mappa di bit
Vantaggi
Svantaggi
semplice, è possibile selezionare aree contigue
la memorizzazione del vettore può richiedere molto spazio
Nota:
Intel 80386 e succ. Motorola 68020 e succ. hanno istruzioni per
trovare l’offset del primo bit acceso/spento in una word
20
Gestione spazio libero - Lista concatenata
Descrizione
i blocchi liberi vengono mantenuti in una lista
concatenata
si integra perfettamente con il metodo FAT
per l'allocazione delle aree libere
spazio allocabile
FAT
3
10
7
nil
0-5
6
nil
6-11
4
directory
Name
Start End
a
0
4
b
1
6
Free list
5
21
Gestione spazio libero - lista concatenata
Vantaggi
richiede poco spazio in memoria centrale
Svantaggi
l’allocazione di un’area di ampie dimensioni è costosa
l’allocazione di aree libere contigue è molto difficoltosa
22
Gestione spazio libero - Lista concatenata (blocchi)
Descrizione
Free list
è costituita da una lista concatenata di blocchi contenenti
puntatori a blocchi liberi
12
35
23
32
33
45
22
11
32
55
27
34
53
65
28
19
39
59
97
94
93
95
08
nil
23
Gestione spazio libero - Lista concatenata (blocchi)
Vantaggi
ad ogni istante, è sufficiente mantenere in memoria
semplicemente un blocco contenente elementi liberi
non è necessario utilizzare una struttura dati a parte;
i blocchi contenenti elenchi di blocchi liberi possono essere
mantenuti all'interno dei blocchi liberi stessi
Svantaggi
l’allocazione di un’area di ampie dimensioni è costosa
l’allocazione di aree libere contigue è molto difficoltosa
24
Gestione spazio libero: un po' di conti
Premesse
blocchi: 1K
dimensione partizione: 16GB
Mappa di bit
Lista concatenata (FAT)
224 bit = 221 byte = 2048 blocchi = 2MB per la bitmap
224 puntatori = 224*3 byte = 48MB per la FAT
Lista concatenata (blocchi)
spazio occupato nei blocchi liberi
25
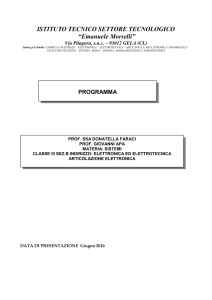
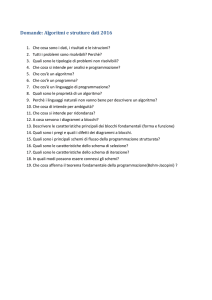
Gestione spazio libero: un po' di conti
Scegliere la dimensione di un cluster
cluster grandi: alta velocità di lettura ma elevata frammentazione
cluster piccoli: bassa velocità e scarsa frammentazione,
dati ottenuti su file system reali, lunghezza media: 2Kb
Block size
© 1995-2002 Andrew S. Tanenbaum
26
Implementazione delle directory
Una directory
è un file speciale contenente informazioni sui file contenuti nella
directory
una directory è suddivisa in un certo numero di directory entry
ogni directory entry deve permettere di accedere a tutte le
informazioni necessarie per gestire il file
nome
attributi
informazioni di allocazione
Scelte implementative da considerare
attributi contenuti nelle directory entry oppure nell'i-node
lista lineare (array) vs hash table
27
Implementazione delle directory
Informazioni nelle directory entry
la directory entry contiene tutte le
informazioni necessarie associate
ad un file
utilizzata da MS-DOS
nome file
attributi
info allocaz.
nome file
attributi
info allocaz.
Informazione negli i-node
le informazioni sono contenute
negli inode; una directory entry
contiene un indice di inode
utilizzata in UNIX
nome
nome
nome
nome
i-node
i-node
i-node
i-node
28
Implementazione delle directory
Problema della lunghezza dei nomi
memorizzare nomi a lunghezza variabile nelle directory
comporta una serie di problemi
Lunghezza fissa
è il meccanismo più semplice...
...ma presenta un trade-off:
spazio riservato molto grande, spreco di memoria
spazio riservato troppo piccolo, nomi troppo brevi
Lunghezza variabile
la struttura dati diviene più complessa
due possibili esempi nel lucido successivo
29