La Comunicazione NR&N
Roberto Marani
Anna Gina Perri
Dipartimento di Ingegneria Elettrica
e dell’Informazione, Laboratorio di
Dispositivi Elettronici, Politecnico di
Bari
Memorie ferroelettriche e magnetiche:
stato dell’arte e sviluppi futuri
Ferroelettric and magnetic memories: status and future
challenges
Sommario
In questo articolo vengono esaminate le memorie di ultimissima generazione: le Memorie Ferroelettriche (FeRAM), basate sull’effetto fotoelettrico, e le Memorie Magnetiche (MRAM), basate sull’effetto tunnel magnetico. Entrambi questi tipi di memorie forniscono performance superiori rispetto alle attuali FlashRAM e promettono di superare
i limiti strutturali a cui le Flash stanno attualmente andando in contro.
Abstract
In this paper we present the status and future challenges of ferroelectric and magnetic memories, which are the promise for dramatic improvements in the speed, endurance and power consumption of non-volatile semiconductor memories.
1. Introduzione
Le memorie hanno assunto un ruolo sostanziale nell’attuale scenario tecnologico mondiale, essendo necessarie e praticamente presenti in ogni dispositivo
elettronico consumer (Fig. 1). Esse trovano applicazione, infatti, nei personal computer, nei cellulari, nelle macchine fotografiche digitali, nei sistemi audio: ovunque
ci sia, insomma, la necessità di memorizzare dati, in piccole o grandi quantità e
con tempi di accesso più o meno ridotti.
Figura 1
Applicazioni più comuni delle memorie in
elettronica.
La Comunicazione NR&N
161 161
R. Marani, A. G. Perri
Esistono diversi tipi di memoria, a seconda della capacità di memorizzazione
e del tempo necessario a reperire l’informazione in esse contenuta. Le memorie
sono generalmente organizzate in matrici bidimensionali di celle, ognuna delle
quali preposta alla memorizzazione di un bit.
L’accesso a ciascuna cella avviene secondo un meccanismo noto come accesso casuale, perchè la lettura del contenuto di ciascuna cella avviene in un tempo
indipendente dalla posizione occupata dalla cella nella matrice.
Le memorie a semiconduttore tradizionali sono realizzate mediante tecnologia
CMOS, che permette l’integrazione monolitica ad altissima scala (ULSI) di dispositivi MOSFET a canale n e a canale p. Peraltro le memorie a semiconduttore
possono essere realizzate secondo tecnologie differenti.
Una classificazione piuttosto importante riguarda la capacità di tali dispositivi
di conservare l’informazione quando questi non sono alimentati.
Le memorie sono dette volatili quando perdono l’intero contenuto informativo in assenza di alimentazione; sono non volatili quelle memorie che mantengono l’informazione anche in assenza di alimentazione.
In generale, le memorie volatili permettono un accesso più rapido al contenuto binario in esse memorizzato: è possibile accedere in lettura e/o scrittura
con tempi di accesso molto ridotti, bassi livelli di potenza e memorizzare grandi
quantità di dati. Al contrario, le memorie non volatili hanno tempi di accesso
sensibilmente più lunghi e mantengono, almeno attualmente, consumi di potenza
piuttosto elevati.
La tendenza attuale è quella di unire i vantaggi di entrambi tipi di memoria,
realizzando dispositivi in grado di mantenere l’informazione anche in assenza di
alimentazione, accedendo rapidamente al contenuto binario e con bassi livelli di
potenza. Molto significativa è, inoltre, la durata di una memoria a semiconduttore
che deve essere la più lunga possibile.
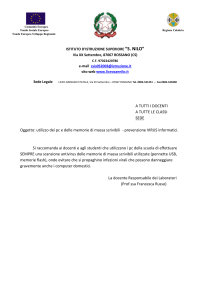
Nella Fig. 2 è mostrata la classificazione delle memorie nelle due grandi famiglie
di memorie volatili e non volatili.
Come si può facilmente osservare, ognuno dei due gruppi è costituito da tipi
diversi di dispositivi, a seconda delle loro intrinseche caratteristiche e delle modalità di funzionamento.
Per quanto riguarda il caso delle memorie volatili, esse adottano in generale teconologia CMOS ed hanno una complessità minore nel caso di DRAM (Dynamic
Random Access Memory) e maggiore nel caso di SRAM (Static RAM).
Figura 2
Classificazione delle memorie
162
La Comunicazione NR&N
Memorie ferroelettriche e magnetiche: stato dell’arte e sviluppi futuri
Ferroelectric and magnetic memories : status and future challenges
Le memorie non volatili racchiudono diverse famiglie di dispositivi, quasi tutti
basati sulla cella elementare con MOS floating gate, nella sua struttura base o
rielaborata per migliorarne le prestazioni.
Alle memorie non volatili appartengono anche le memorie ferroelettriche e
magnetiche che, impiegando principi di base e tecnologie differenti, permettono
il miglioramento spinto delle prestazioni e la conservazione, per tempi teoricamente indeterminati, delle informazioni in esse contenute.
In questo articolo vengono esaminate le memorie di ultimissima generazione:
le Memorie Ferro-elettriche (FeRAM), basate sull’effetto fotoelettrico, e le Memorie Magnetiche (MRAM), basate sull’effetto tunnel magnetico. Entrambi questi
tipi di memorie forniscono performance superiori rispetto alle attuali FlashRAM
e promettono di superare i limiti strutturali a cui le Flash stanno attualmente
andando in contro.
2. Memorie ferroelettriche: brevi cenni storici
Le memorie ferroelettriche rappresentano un’importante evoluzione tecnologica in quanto presentano, rispetto alle memorie a semiconduttore, indiscusse
migliorie in termini di velocità, durata e consumo di potenza.
Le attuali memorie Flash e le EEPROM permettono la memorizzazione in
modo non volatile di grandi quantità di dati ma richiedono alte tensioni di programmazione, tempi di programmazione lunghi ed una vita pari a qualche milione
di cicli di programmazione.
Altri tipi di tecnologie sono state dunque studiate per permettere la produzione di memorie a semiconduttore caratterizzate da basse tensioni di programmazione, tempi di programmazione più veloci ed una durata teoricamente illimitata.
Particolare importanza rivestono le memorie ferroelettriche e le memorie
magnetiche a film sottile, le prime basate sulla variazione dello stato di polarizzazione di un condensatore ferroelettrico, le seconde basate sull’impiego del
cosiddetto effetto magneto-resistivo gigante, che verrà discusso in seguito.
Le memorie non volatili ferroelettriche furono sviluppate e brevettate nei primi anni cinquanta, e già dimostrarono ottime caratteristiche in termini di durata,
velocità e basse tensioni di programmazione.
Una delle prime architetture brevettate si deve a J.R Anderson, che di fatto aggiungeva a ciascun elemento di memoria una coppia di diodi in serie per ridurre
la caduta di tensione sulle celle di memoria deselezionate.
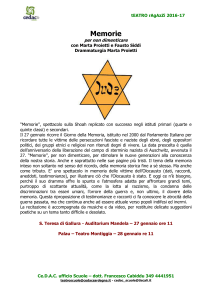
Tale architettura, mostrata in Fig. 3, richiedeva una tensione di breakdown
Figura 3
Memoria ferroelettrica brevettata da
Anderson
La Comunicazione NR&N
163 361
R. Marani, A. G. Perri
inversa della serie di diodi (rappresentata dai due triangoli con un rettangolo in
comune) maggiore della tensione di commutazione del condensatore ferroelettrico.
Le architetture attuali sono simili a quella proposta da Anderson, anche se
hanno sostituito il dispositivo a diodi con strutture MOS.
Durante gli anni sessanta e settanta molti studi sono stati fatti per combinare
le tecnologie ferroelettriche con le convenzionali tecnologie del silicio. L’idea era
quella di creare un transistore MOS con un gate di materiale ferroelettrico, così
da realizzare una cella di memoria basata sugli effetti di modulazione della polarizzazione ferroelettrica sulla conduttività del canale del transistore.
Tale tipo di struttura mista è stata subito abbandonata, a causa dell’esistenza di
incompatibilità tra i materiali ferroelettrici ed il silicio.
In particolare, la maggior parte dei materiali ferroelettrici tendono a perdere
ossigeno e a formare uno strato di materiale ridotto durante la fase di annealing.
L’ossigeno perso dallo strato ferroelettrico ossida il silicio nella regione di canale,
rendendo il dispositivo inservibile. Inoltre la permettività dei materiali ferroelettrici è di oltre due ordini di grandezza superiore rispetto a quella dell’ossido di
silicio (3.95 per il SiO2): ciò significa che anche uno strato molto sottile d’ossido di silicio presente sotto lo strato di materiale ferroelettrico impedisce alla
tensione di programmazione di localizzarsi ai capi di quest’ultimo, rendendo il
dispositivo di fatto inservibile.
Per risolvere questi problemi sono state proposte, negli anni ottanta, delle
soluzioni circuitali basate su componenti discreti.
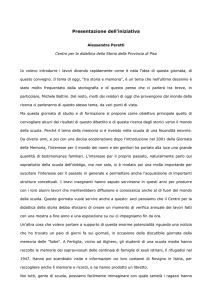
In particolare, come mostrato in Fig. 4, una cella di memoria ferroelettrica è
costituita da un condensatore ferroelettrico discreto in serie con un transistore
MOS, architettura simile a quella proposta da Anderson.
La Word line è la linea di attivazione della cella: se alta essa attiva il MOS che
collega direttamente il condensatore ferroelettrico con l’amplificatore. In questo
modo lo stato di carica del condensatore, che dipende dallo stato di polarizzazione del dielettrico, può essere comparato, dall’amplificatore, con una tensione
di riferimento.
Metalli nobili come il platino vengono utilizzati per realizzare gli elettrodi del
condensatore ferroelettrico. Utilizzando questa architettura scompare il problema legato alla cessione di ossigeno al silicio da parte del materiale ferroelettrico.
164
Figura 4
Schema di cella di memoria con condensatore ferroelettrico discreto
La Comunicazione NR&N
Memorie ferroelettriche e magnetiche: stato dell’arte e sviluppi futuri
Ferroelectric and magnetic memories : status and future challenges
Esistono diversi materiali adatti per realizzare condensatori ferroelettrici.
Il primo materiale utilizzato fu il PZT (Piombo Zirconio Titanato), seguito poi
dall’SBT (Stronzio Bismuto Tantalato): quest’ultimo materiale ha suscitato l’interesse da parte della comunità scientifica a causa della sua maggiore resistenza alla
fatica, rispetto al PZT. Ciò permette di utilizzare elettrodi di platino e garantisce
una vita del componente molto lunga. Il principale svantaggio dell’SBT è la necessità di essere trattato a temperature più alte (700°C) rispetto a quelle del PZT
(450°C), perché le proprietà ferroelettriche siano accentuate.
Un significativo progresso nella tecnologia del PZT si è ottenuto con l’impiego
di elettrodi in LSCO (Lantano Stronzio Cobalto ossido) che, sostituendo gli elettrodi in platino, hanno migliorato le caratteristiche di durata del materiale fino
ad approssimare l’SBT.
Diversi prototipi di memorie ferroelettriche in PZT e SBT sono stati realizzati
e la maggior parte dei problemi di fabbricazione sono stati risolti.
Poiché i processi realizzativi di questo tipo di memoria sono simili ai processi
utilizzati per le classiche DRAM che già incorporano condensatori con dielettrico ad alta costante, c’è da attendersi un altrettanto rapido incremento di densità
di integrazione ed una massiva diffusione del nuovo tipo di memorie sul mercato.
3. Funzionamento delle memorie ferroelettriche
La ferroelettricità, come è noto, è l’allineamento spontaneo dei dipoli elettrici
per mutua interazione sotto l’influenza di un campo elettrico esterno applicato.
Al di sotto di una certa temperatura critica Tc, detta temperatura di Curie,
alcuni isolanti mostrano caratteristiche di ferroelettricità.
La Fig. 5 mostra la dipendenza della permettività dielettrica relativa er dalla
temperatura.
Il termine permettività identifica, diversamente dal termine costante dielettrica, un comportamento non costante, che è tipico dei materiali ferroelettrici.
Poiché la capacità dei condensatori ferroelettrici è direttamente proporzionale alla permettività del materiale ferroelettrico, la curva capacità-temperatura ha
la stessa forma rappresentata in Fig. 5.
Si osservi che, in prossimità della temperatura critica, la permettività relativa
diventa molto elevata per poi decadere secondo la legge di Curie-Weiss data
da:
Figura 5
Andamento della permettività relativa in
funzione della temperatura
La Comunicazione NR&N
er =
C
T − Tc 1)
165 561
R. Marani, A. G. Perri
dove C è la costante di Curie e T è la temperatura.
Poiché lo stato ferroelettrico non esiste al di sopra della temperatura di Curie,
è importante che quest’ultima sia, per i materiali ferroelettrici impiegati, superiore alle temperature di esercizio.
Materiali come PZT ed SBT sono caratterizzati da una cella unitaria detta di
perovskite e rappresentata in Fig. 6.
La struttura cristallina è di tipo ABO3, dove B è un catione (Zirconio per il
PZT) localizzato al centro della cella unitaria, A è un catione relativamente grande (Piombo per il PZT) localizzato sugli spigoli della cella unitaria, O è un anione
di ossigeno localizzato al centro di ogni faccia della cella.
A temperatura più alta della temperatura di Curie, la struttura della perovskite
ha una simmetria cubica ed è paraelettrica.
Al di sotto della temperatura di Curie la cella perde la sua simmetria cubica
per assumere una struttura tetragonale, ortorombica o romboedrica.
Dalla Fig. 6 si osserva che il catione B possiede due posizioni di equilibrio stabile, che ne determinano l’effetto ferroelettrico, posizioni che possono essere controllate da un campo elettrico esterno.Tali materiali trovano dunque applicazione
come dielettrici per la realizzazione di condensatori ferroelettrici. L’applicazione
di una tensione ad un condensatore siffatto produce un cambiamento nella posizione del centroide carico nel materiale ferroelettrico.
Figura 6
Struttura di un cristallo di perovskite
ABO3
166
La Comunicazione NR&N
Memorie ferroelettriche e magnetiche: stato dell’arte e sviluppi futuri
Ferroelectric and magnetic memories : status and future challenges
Applicando un campo elettrico esterno ad un condensatore ferroelettrico si
ottiene una curva di isteresi, mostrata in Fig. 7, che mette in relazione la polarizzazione P con la tensione applicata.
La curva satura ad un valore di polarizzazione massimo Ps. Una volta raggiunto questo valore di polarizzazione è possibile osservare, dopo aver rimosso il
campo elettrico esterno, un decadimento della polarizzazione fino ad un valore
residuo Pr detto polarizzazione residua.
Tale decadimento non si verifica istantaneamente ma nell’arco di qualche millisecondo.
Il vettore spostamento di Maxwell D deve essere riscritto in modo da tenere
conto sia del campo elettrico esterno E sia della polarizzazione P:
D = e0E + P
2)
dove e0 è la permettività dello spazio vuoto.
Per la maggior parte dei materiali ferroelettrici si ha che il termine e0E è minore di P e ciò implica che D è circa eguale a P, ovvero che la curva di isteresi
mostrata in Fig. 7 rappresenta anche l’andamento di D in funzione del campo
elettrico applicato.
La polarizzazione ferroelettrica può cambiare in meno di un nanosecondo:
ciò permette sia di memorizzare sia di leggere lo stato di un bit con velocità di
accesso molto elevate.
Si tenga presente che ad ogni stato di polarizzazione è associato lo stato di un
bit. Per leggere a quale stato si trova il bit è necessario quindi stabilire a quale
stato di polarizzazione si trova il materiale ferroelettrico.
A tal proposito viene forzato un impulso di tensione molto stretto, della durata di qualche decina di nanosecondi: se tale impulso è tale da opporsi allo stato di
polarizzazione residua, viene prodotta una commutazione di polarizzazione con
la conseguente generazione di un impulso di corrente detta di commutazione.
Figura 7
Curva di isteresi per un materiale ferroelettrico
La Comunicazione NR&N
Tale impulso di corrente è sufficientemente largo, e può essere facilmente
rilevato da un amplificatore per determinare lo stato di polarizzazione iniziale.
167 761
R. Marani, A. G. Perri
4. La magnetoresistenza gigante
La scoperta della magnetoresistenza gigante GMR (Giant MagnetoResistance),
avvenuta nel 1988, nelle strutture a strato ferromagnetiche, ha dato origine ad
una vera e propria rivoluzione nel mondo dell’elettronica, con interessanti ricadute nel settore delle memorie.
La GMR è la variazione della resistenza di una struttura complessa, costituita
dall’alternanza di strati magnetici e non-magnetici, quando l’orientazione relativa
delle magnetizzazioni in strati magnetici adiacenti commuta a seguito dell’applicazione di un intenso campo magnetico.
Nella Fig. 8 è mostrata la struttura base, costituita da due strati magnetici ed
uno strato metallico non magnetico. La magnetizzazione di ogni strato magnetico dipende, in assenza di campo, dal suo spessore. E’ dunque possibile scegliere
gli spessori dei due strati magnetici in modo da garantire, in assenza di campo
magnetico applicato, magnetizzazioni antiparallele degli strati magnetici adiacenti
(configurazione anti-ferromagnetica, AF).
La Fig. 8 si riferisce al caso di una struttura GMR in cui lo strato magnetico
superiore ha uno spessore maggiore di quello inferiore. In tale condizione la resistenza offerta dalla struttura multistrato al passaggio di corrente di elettroni,
perpendicolare alla direzione di accrescimento degli strati, è molto elevata.
Strato magnetico
Strato non magnetico
Strato magnetico
A seguito dell’applicazione di un campo magnetico sufficientemente intenso,
è possibile variare l’orientazione della magnetizzazione di uno dei due strati in
modo da ottenere una condizione di parallelismo delle due magnetizzazioni: tale
stato, detto ferromagnetico (FM), garantisce una bassa resistenza al passaggio
di corrente elettrica, costituita da elettroni aventi spin opportuno.
E’ possibile definire un fattore di merito, indicato con GMR, che indica la variazione relativa di conduttanza tra i due stati di funzionamento del dispositivo:
GMR =
G FM − G AF
3)
G AF
in cui GAF e GFM indicano rispettivamente la conduttanza della struttura in
condizioni di funzionamento antiparallela e parallela.
E’ ovviamente auspicabile che la GMR sia la più alta possibile, in modo che vi sia
la massima differenza possibile tra la conduttanza allo stato ferromagnetico (alta)
e la conduttanza allo stato anti-ferromagnetico (bassa).
I primi esperimenti sulla GMR sono stati effettuati imponendo un flusso di
corrente nel piano degli strati (Current In Plane) non ottenendo, tuttavia, valori
sufficientemente elevati del fattore GMR.
Un importante passo in avanti, verso il raggiungimento di GMR sempre più
168
Figura 8
Struttura base GMR
La Comunicazione NR&N
Memorie ferroelettriche e magnetiche: stato dell’arte e sviluppi futuri
Ferroelectric and magnetic memories : status and future challenges
elevate, è stato ottenuto imponendo un flusso di corrente nella direzione perpendicolare agli strati costituenti la struttura (Current Perpendicular Plane). Alcuni
autori hanno dimostrato l’effettiva maggiore efficienza di quest’ultima architettura rispetto alla prima, in termini di migliori valori di GMR, in quanto il trasporto
di carica interessa non un solo strato, come nel caso della prima struttura ipotizzata, ma tutti gli strati che compongono la struttura.
Una miglioria del sistema rispetto alla configurazione evidenziata nella Fig. 8
consiste nell’utilizzare un numero elevato di strati, alternativamente magnetici e
non magnetici, come mostrato in Fig. 9. Ciò permette di ottenere valori maggiori
di resistenza elettrica, soprattutto in condizione di anti-ferromagnetismo.
Tuttavia questa soluzione presenta alcuni inconvenienti, legati principalmente
alla complessità della struttura composita realizzata. In particolare la struttura
bulk rende disordinato e non omogeneo il trasporto di cariche.
5. Memorie magnetiche: le MRAM a valvole di spin
Una RAM magnetica (MRAM), mostrata in Fig.10, è costituita da due strati
magnetici separati da uno non magnetico (o barriera-tunnel). Quest’ultimo ha la
funzione di separare i due strati precedenti e di rendere indipendenti le rispettive magnetizzazioni M1 ed M2.
A
B
C
Strato M1
Strato M2
Figura 9
Configurazioni multistrato (a) anti-ferromagnetiche e (b) ferromagnetiche
Output
Figura 10
Valvola di spin
La Comunicazione NR&N
169 961
R. Marani, A. G. Perri
Tale struttura, detta anche valvola di spin (spin valve), basa il suo principio
di funzionamento sul concetto di magnetoresistenza gigante: la variazione della
magnetizzazione di uno dei due strati provoca una variazione della resistenza
elettrica al passaggio di una corrente. La codifica di uno dei due stati di un bit è
legata proprio alla resistenza della valvola di spin, che si mantiene anche in assenza di alimentazione.
La scrittura di un bit richiede, pertanto, un campo megnetico che possa ruotare la magnetizzazione di uno dei due strati.
Ciò può essere ottenuto tramite una corrente, di intensità opportuna, da inviare su una linea elettrica dedicata.
Con riferimento alla Fig. 10, una intensa corrente sulla linea A può essere in
grado di modificare lo stato di magnetizzazione M1 e di variare la resistenza
dell’intera struttura. La lettura può essere effettuata tramite la misura della resistenza della valvola, operazione che non distrugge l’informazione immagazzinata
e che non richiede il refresh, tipico delle memorie realizzate in tecnologia CMOS.
Ciò determina una maggiore velocità delle memorie magnetiche rispetto alle
corrispondenti memorie DRAM, oltre ad un maggior numero di operazioni che
è teoricamente possibile prevedere.
La struttura a valvola di spin permette, inoltre, di realizzare facilmente porte
logiche veloci.
Con riferimento sempre alla Fig. 10, una singola valvola con due linee di input
indipendenti (A e B) è in grado di memorizzare un bit e implementare le funzioni
logiche AND e OR. Le linee di input, A e B, sono attraversate da correnti positive
o negative ±IA e ±IB di uguale intensità. Ciascuna delle due correnti da sola non
è in grado di invertire la magnetizzazione M1, a meno che non agisca congiuntamente con la corrente sull’altro ingresso: le due correnti IA e IB insieme, sono in
grado di ruotare M1 ma non M2. Per ottenere la rotazione anche della magnetizzazione M2 è necessario ricorrere all’impiego di una ulteriore linea C di ingresso.
Nella Fig. 11 è rappresentata una valvola di spin impiegata per realizzare una
porta AND. Assumendo come positiva la magnetizzazione dello strato inferiore
M2, rappresentata con una freccia diretta verso destra, l’allineamento della magnetizzazione M1 verso destra determina la configurazione pa
rallela alla quale corrisponde un “1” logico.
Diversamente, l’allineamento della magnetizzazione M1 verso sinistra determina la configurazione antiparallela alla quale compete la massima magnetoresistenza e, quindi, uno “0” logico in uscita.
Da un punto di vista operativo si imposta la struttura perché essa inizialmente
sia in configurazione antiparallela (0 logico in uscita) mediante l’imposizione di
correnti negative su entrambi gli ingressi A e B (0 logico su entrambi gli ingressi).
170
Figura 11
Porta AND a valvola di spin
La Comunicazione NR&N
Memorie ferroelettriche e magnetiche: stato dell’arte e sviluppi futuri
Ferroelectric and magnetic memories : status and future challenges
Una volta in questa condizione, sarà possibile invertire lo stato di magnetizzazione di M1 (e quindi ottenere un “1” logico in uscita) solo imponendo entrambe
le correnti positive sugli ingressi A e B.
Diversamente, nel caso in cui almeno uno degli ingressi sia “0”, il campo magnetico coercivo prodotto non è sufficiente ad invertire la direzione di magnetizzazione M1 dello strato superiore.
La Fig. 12 rappresenta schematicamente quanto esposto.
Nella configurazione (a) le correnti sugli ingressi, essendo negative, non invertono lo stato di magnetizzazione M1, facendo permanere lo stato di elevata
magnetoresistenza tra gli strati magnetici.
Nel caso (b) le due correnti in ingresso, essendo contropropaganti, non generano un campo magnetico sufficiente a produrre l’inversione della magnetizzazione M1, producendo ancora uno “0” logico in uscita.
Nel caso (c) le due correnti, che scorrono entrambe verso destra, riescono a
produrre un campo coercitivo sufficientemente elevato da invertire la direzione
di magnetizzazione M1, producendo un abbassamento della GMR ed un “1” logico
in uscita.
Per realizzare porte NAND è necessario negare l’uscita della porta AND corrispondente (cfr. Fig. 13).
Figura 12
Porta AND a due ingressi
Ciò può essere ottenuto invertendo la direzione di magnetizzazione M2, mediante l’introduzione di un ulteriore linea elettrica in grado di potenziare il campo coercivo prodotto dalle linee A e B.
Figura 13
Porta NAND
La Comunicazione NR&N
171 171
R. Marani, A. G. Perri
6. Conclusioni
In questo articolo sono state esaminate le memorie di ultimissima generazione:
le Memorie Ferro-elettriche (FeRAM) e le Memorie Magnetiche (MRAM).
Entrambi questi tipi di memorie forniscono performance superiori rispetto
alle attuali FlashRAM e promettono di superare i limiti strutturali a cui le Flash
stanno attualmente andando in contro.
In particolare le RAM magnetiche (MRAM) possono raggiungere timings teorici di 2.3 nanosecondi in scrittura. Si tratta di un tempo 1,000 volte più veloce delle attuali FlashRAM e 20 volte maggiore delle più veloci FeRAM, che comunque
ma rappresentano un passo avanti non indifferente rispetto alle attuali memorie
Flash.
Inoltre le MRAM accedono in lettura in 3 ns, circa 20 volte più veloce della
memoria DRAM e consumano meno di 1/100 rispetto alle DRAM.
Riteniamo, in definitiva, che le MRAM potranno sostituire le celle di SRAM
essendo veloci, piccole e resistenti alle radiazioni.
Bibliografia e webgrafia di riferimento
A. G. Perri: “Fondamenti di Dispositivi Elettronici”; Ed. Progedit, 2010, ISBN
978-88-6194-080-2.
A. G. Perri: “Dispositivi Elettronici Avanzati”; Ed. Progedit, 2011, ISBN 978-886194-081-9.
J.R. Anderson, “Electrical circuits employing ferroelectric capacitors,” U.S. Patent No. 2,876,436, 1959.
C.A. Paz de Araujo et al., “Fatigue-free ferroelectric capacitors with platinum
electrodes”, Nature, vol. 374, no. 627, 1995.
Fujitsu Limited, FRAM GUIDE BOOK, Fujitsu Semiconductor Manual, 2005.
http://physics.unl.edu/~tsymbal/tsymbal_files/GMR/gmr.html
www.lithium.it
www.hwupgrade.it/memorie.hwu
172
La Comunicazione NR&N