Università degli Studi “Roma Tre”
Laurea in Fisica
Dipartimento di Matematica e Fisica
Il problema della misura in meccanica
quantistica e le teorie del collasso
Relatore:
Prof. Vittorio LUBICZ
Anno Accademico 2014-2015
Laureando:
Riccardo AZZALI
Indice
Introduzione
3
1 Il problema della misura nella Meccanica Quantistica
1.1 Evoluzione quantistica e riduzione del pacchetto d’onde
1.1.1 L’interpretazione ortodossa di Copenaghen . . .
1.1.2 Il principio di sovrapposizione . . . . . . . . . .
1.1.3 L’entanglement quantistico . . . . . . . . . . . .
1.1.4 La riduzione del pacchetto d’onde . . . . . . . .
1.2 Il processo di misura . . . . . . . . . . . . . . . . . . .
1.2.1 Il processo ideale . . . . . . . . . . . . . . . . .
1.2.2 La catena di Von Neumann . . . . . . . . . . .
1.2.3 Il gatto di Schrödinger . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
6
6
6
7
7
10
11
11
12
14
2 Interpretazioni al problema di misura
2.1 Le teorie a variabili nascoste . . . . . . . .
2.1.1 La teoria dell’onda pilota di Bohm
2.1.2 La meccanica bohmiana e la misura
2.2 La teoria dei multimondi . . . . . . . . . .
2.3 Wigner e il collasso con la coscienza . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
16
16
17
19
19
21
.
.
.
.
.
.
.
.
.
.
23
23
24
24
25
26
27
27
29
31
33
.
.
.
.
.
3 La teoria GRW
3.1 Premessa . . . . . . . . . . . . . . . . . . . .
3.2 Operatore densità . . . . . . . . . . . . . . .
3.2.1 Definizione dell’operatore densità . .
3.2.2 Matrice di densità ridotta . . . . . .
3.2.3 L’evoluzione temporale dell’operatore
3.3 Il lavoro di GRW . . . . . . . . . . . . . . .
3.3.1 Analisi dei microsistemi . . . . . . .
3.3.2 Il fattore di smorzamento F(k, q, t) .
3.3.3 Analisi dei macrosistemi . . . . . . .
3.3.4 Scelta dei parametri λ e α . . . . . .
1
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. . . . .
. . . . .
. . . . .
. . . . .
densità
. . . . .
. . . . .
. . . . .
. . . . .
. . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
4 Critiche alla teoria GRW
4.1 Il modello percettivo con la teoria GRW . . . . . . . . . . . . . . . . . .
4.2 L’assenza di una generalizzazione relativistica . . . . . . . . . . . . . . .
35
35
38
Appendice A Lo spazio di Hilbert e il prodotto tensoriale
A.1 Definizione dello spazio di Hilbert . . . . . . . . . . . . . . . . . . . . . .
A.2 Il prodotto tensoriale . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
40
40
41
Appendice B
Soluzione per l’equazione GRW (3.22) per la particella
libera
Bibliografia
43
49
2
Introduzione
L’argomento affrontato in questa tesi è il postulato del collasso della funzione d’onda
correllato inevitabilmente al processo di misura.
Nella meccanica quantistica vige il principio di sovrapposizione: se un sistema può trovarsi
in due o più stati distinti, potrà anche trovarsi nella sovrapposizione lineare di questi stati.
Per i sistemi macroscopici questo fenomeno di sovrapposizione non si è mai percepito ed
è stato la causa di numerosi dibattiti oltre che fisici anche filosofici.
Prima di proseguire soffermiamo l’attenzione sulle definizioni di “Misura in meccanica
quantistica” e “Collasso”:
1. La misura in meccanica quantistica indica l’interazione fra sistemi microscopici
(misurandi) e macroscopici (misuratori): la descrizione di tale processo risulta
complessa sia dal punto di vista pratico sia dal punto di vista concettuale.
2. Il collasso indica quel processo nel quale la funzione d’onda, rappresentante una
sovrapposizione lineare di stati di un qualche osservabile, si riduce (collassando) a
uno solo di questi stati, rappresentando quindi quel senso di realtà classica cui siamo
stati abituati dall’esperienze quotidiane (apparentemente il collasso è correlato alla
misura dell’osservabile in questione).
Se il sistema che vogliamo misurare si trova, secondo la teoria, nella sovrapposizione
di due o più stati e se la misura è un processo fisico descritto dalla meccanica quantistica,
che essendo una teoria lineare implica che le sovrapposizioni si conservano per evoluzione,
il come il quando e il perché avviene il collasso, ovvero il come il quando e il perché i
nostri processi di misura hanno esiti che corrispondono alle nostre definite percezioni,
sono ancora fonti di ricerca e di numerose interpretazioni.
La risposta ortodossa è che l’interazione con sistemi microscopici preserva le sovrapposizioni, quindi non è l’interazione dell’elettrone con un altro elettrone o un quanto del
campo elettromagnetico che costringe il sistema a “scegliere” il suo stato (e questo è stato
sperimentalmente verificato). Tuttavia, secondo l’ortodossia, è la natura macroscopica
dell’apparato che viene innescato dalla particella o da quelle con cui essa ha interagito
che porta a una sola delle due o più situazioni possibili. Ecco perchè la teoria del collasso
è strettamente correllata a quella della misura in meccanica quantistica in quanto il
misuratore è supposto essere sempre macroscopico.
3
La questione che tutt’ora non è stata ancora risolta riguarda proprio quest’approccio
ortodosso: esso richiede di dividere il mondo in due, i microsistemi e i macrosistemi, i
processi reversibili e quelli irreversibili, i sistemi classici e quelli quantistici (un elettrone
è quantistico e un gatto è classico). Non ci sarebbe nulla di male se le cose stessero così,
e così accade in molti ambiti classici: dieci particelle non sono un gas ma un numero di
Avogadro di molecole ha comportamenti irreversibili che sembrano contrastare la perfetta
reversibilità della teoria (meccanica classica) che soggiace all’interazione tra particelle. Ma
qui esistono parametri precisi che ci dicono cosa richiede un trattamento deterministico e
cosa implica (per le nostre limitazioni pratiche) un trattamento statistico.
In meccanica quantistica non esiste alcun parametro che permetta di definire il “confine
ambiguo” (come viene definito da Ghirardi in [1]). Per descrivere lo stato di un macrocristallo, o il comportamento di un superconduttore o tanti altri processi mesoscopici e/o
macroscopici, è essenziale una trattazione quantistica; perché e quando e dove dovremmo
abbandonarla per descrivere indici di apparecchi, tavoli e gatti?
In questa tesi saranno discusse le soluzioni più rilevanti di questo problema con una
dettagliata attenzione a quella che a mio avviso è la più interessante e (mi si conceda il
termine) “vicina alla realtà”: la teoria GRW.
Elaborata dai tre fisici italiani, Ghirardi, Rimini e Weber, questa teoria [2] assume che
ogni costituente del mondo fisico oltre ad ubbidire alla dinamica lineare di Schrödinger è
soggetto, a tempi casuali e con una certa frequenza media λ, a dei processi spontanei di
localizzazione spaziale.
In questo modo i tre fisici avendo modificato l’equazione di Schrödinger con l’aggiunta
di termini stocastici e non lineari, mostrano che la riduzione è un processo spontaneo
e indeterministico per qualunque sistema, indipendente quindi dal processo di misura.
Ogni sistema che sia microscopico o macroscopico sarà, per un certo tempo τ , descritto
dalla sovrapposizione di stati possibili; il tempo τ è inversamente proporzionale al numero
di particelle tale da rendere la durata della sovrapposizione impercettibile per i sistemi
macroscopici e significativa per i sistemi microscopici.
Quello, che noi ci immaginiamo,
bisogna che sia o una delle cose già
vedute, o un composto di cose o di
parti delle cose altra volta vedute.
Galileo Galilei
Dialogo sopra i due massimi sistemi
del mondo
4
Ringraziamenti
Con immenso piacere ringrazio il relatore di questa tesi, il Prof. Vittorio Lubicz, che
con pazienza, disponibilità, gentilezza e professionalità mi ha assistito e sostenuto nella
stesura del presente lavoro.
5
Capitolo 1
Il problema della misura nella
Meccanica Quantistica
1.1
Evoluzione quantistica e riduzione del pacchetto
d’onde
La meccanica quantistica, nonostante i numerosi esiti positivi ottenuti nella spiegazione
dei fenomeni microscopici, presenta “imbarazzanti” problemi che riguardano il suo campo
di validità. È un problema ancora aperto la ricerca di un confine tra microscopico e
macroscopico, tra comportamento quantistico e comportamento classico. Richiamando
i caratteri lineari della teoria (ovvero il principio di sovrapposizione e l’entanglement
quantistico) vale la pena soffermare l’attenzione sul modo in cui l’interpretazione ortodossa
della meccanica quantistica presenta tale difficoltà.
1.1.1
L’interpretazione ortodossa di Copenaghen
Fra tutte le interpretazioni che sono state date alla meccanica quantistica quella di
Copenaghen è sicuramente la più condivisa. Ispirata ai lavori fatti nel 1929 da Bohr e
Heisenberg, può essere riassunta dai seguenti assiomi:
1. Indicando con Σ gli stati di un sistema quantistico e con |Ψi i vettori dello spazio
di Hilbert H che descrive il sistema vale la seguente corrispondenza biunivoca:
Σ ⇔ |Ψi ∈ H
2. Ogni grandezza fisica A si può rappresentare in meccanica quantistica mediante un
operatore lineare  autoaggiunto che agisce su H. L’insieme dei valori possibili per
il risultato della misura della grandezza A è dato dallo spettro dell’operatore ad
essa associato.
6
3. Sia |Ψi il vettore che descrive il sistema all’istante iniziale t0 e si supponga che
tra l’istante t0 e t non si effettuino misure sul sistema. Allora lo stato all’istante
t è descritto dal vettore |Ψt i = U (t0 , t) |Ψt0 i dove U è un operatore unitario.
L’evoluzione temporale del vettore di stato |Ψt i è governata dall’equazione di
Schrödinger.
4. Quando la quantità fisica A è misurata su di un sistema nello stato normalizzato
|Ψi, la probabilità indicata con Pan di ottenere l’autovalore an del corrispondente
P n
2
osservabile A è: Pan = gi=1
|huin | Ψi| dove gn è il grado di degenerazione di an e
uin (i = 1, 2, ..., gn ) è un sistema di vettori che forma una base nel sottospazio Hn
delle autofunzioni associate all’autovalore di Â.
5. Se la misura della quantità fisica A su di un sistema nello stato |Ψt0 i dà il risultato
an , lo stato del sistema immediatamente dopo la misura è la proiezione normalizzata
|Ψan i sul sottospazio delle autofunzioni associate ad an .
1.1.2
Il principio di sovrapposizione
Il principio di sovrapposizione rappresenta il carattere lineare della teoria. Confermato
dalla moltitudine di esperimenti eseguiti sui microsistemi, evidenzia la grande divergenza
tra la visione del mondo classico e quella del mondo quantistico
Postulato 1 (Principio di sovrapposizione) In meccanica quantistica ogni stato di
un sistema S, ad un determinato tempo, è descritto completamente da un vettore unitario
|Ψi di uno spazio di Hilbert H associato con il sistema. Si considerino una grandezza
Q e i due stati |Ψ1 i e |Ψ2 i in cui Q abbia un valore definito: q1 nello stato descritto da
|Ψ1 i e q2 6= q1 nello stato descritto da |Ψ2 i; se |Ψi si esprime come combinazione lineare
di |Ψ1 i e |Ψ2 i, allora la misura di Q può fornire come risultato q1 oppure q2 . Viceversa
se nello stato descritto dal ket |Ψi la misura della grandezza Q fornisce come risultato
sia q1 sia q2 , allora |Ψi si esprime come combinazione lineare di |Ψ1 i e |Ψ2 i:
|Ψi =
N
=2
X
ci |Ψi i
(1.1)
i=1
dove
N
=2
X
|ci |2 = 1
∀ci ∈ C.
i=1
1.1.3
L’entanglement quantistico
L’entanglement, che tradotto dall’inglese significa intreccio, è un fenomeno quantistico
che descrive un’importante caratteristica del mondo non classico: se due stati di sistemi
differenti sono entangled non c’è modo di caratterizzarne uno senza far riferimento all’altro.
7
Postulato 2 (Entanglement) Uno stato |Ψi ∈ H1 ⊗ H2 si definisce stato entangled se
non può essere scritto come prodotto tensoriale |αi1 ⊗ |βi2 con |αi1 ∈ H1 e |βi2 ∈ H2 ;
nel caso contrario lo stato si definisce come stato prodotto o non-entangled.
Per rappresentare meglio il fenomeno si pensi al caso specifico in cui gli spazi di Hilbert
H1 e H2 siano entrambi bidimensionali e che {|0i1 , |1i1 } e {|0i2 , |1i2 } rappresentino due
coppie di ket di base.
Dal postulato noi sappiamo che un generico stato sarà definito entangled qualora non
possa essere scritto nella forma :
|Ψi i = |αi1 ⊗ |βi2 .
(1.2)
Adesso si ipotizzi un generico vettore di stato ammesso in tale spazio:
1
|Ψ1 i = √ (|0i1 |1i2 + |1i1 |1i2 )
2
(1.3)
che può essere scomposto (in base alle proprietà del prodotto tensoriale) in:
1
|Ψ1 i = √ {(|0i1 + |1i1 ) ⊗ |1i2 )}
2
(1.4)
esso è proprio della forma (1.2) ergo non sarà uno stato entangled.
Invece se si considera un altro generico vettore di stato ammesso in tale spazio come ad
esempio:
1
(1.5)
|Ψ2 i = √ (|0i1 |0i2 + |1i1 |1i2 )
2
esso non può essere scomposto nella forma (1.2) ergo è uno stato entangled.
Passiamo alla dimostrazione che uno stato entangled non è esprimibile come prodotto
di stati: si prenda uno stato più generico di quello dell’equazione (1.5) sempre riferito a
un sistema composto solo da due particelle
|Φi = c1 |ni1 |mi2 + c2 |n0 i1 |m0 i2 ,
(1.6)
dove la coppia |ni1 , |n0 i1 è una base ortonormale nello spazio della prima particella, la
coppia |mi2 , |m0 i2 è una base ortonormale nello spazio della seconda particella e i valori
c1 , c2 sono due numeri complessi che verificano la relazione
|c1 |2 + |c2 |2 = 1.
(1.7)
Si assuma ora per assurdo che lo stato |Φi della (1.6) sia esprimibile con il prodotto di
due generici stati: |xi1 corrispondente alla prima particella e |yi2 corrispondente alla
seconda particella
|Φi = |xi1 |yi2 .
(1.8)
8
i ket |xi1 e |yi2 si possono esprimere come combinazione delle due basi precedentemente
introdotte ovvero dalle coppie |ni1 , |n0 i1 e |mi2 , |m0 i2 :
|xi1 = a1 |ni1 + a2 |n0 i1 ,
(1.9a)
|xi2 = b1 |mi2 + b2 |m0 i2 ,
(1.9b)
dove le coppie a1 , a2 e b1 , b2 rispettano la (1.7).
Inserendo le equazioni (1.9) nella (1.8) si ottiene:
|Φi = |xi1 |yi2 = (a1 |ni1 + a2 |n0 i1 )(b1 |mi2 + b2 |m0 i2 ) =
(1.10)
= a1 b1 |ni1 |mi2 + a1 b2 |ni1 |m0 i2 + a2 b1 |n0 i1 |mi2 + a2 b2 |n0 i1 |m0 i2 .
Confrontando la (1.10) con la (1.6):
c1 |ni1 |mi2 +c2 |n0 i1 |m0 i2 = a1 b1 |ni1 |mi2 +a1 b2 |ni1 |m0 i2 +a2 b1 |n0 i1 |mi2 +a2 b2 |n0 i1 |m0 i2 ,
si evince che
a1 b2 = a2 b1 = 0.
(1.11)
La (1.11) implica a sua volta che si deve verificare almeno una delle due seguenti relazioni:
c1 = a1 b2 = 0,
(1.12a)
c2 = a2 b1 = 0,
(1.12b)
in netto contrasto con le nostre ipotesi iniziali.
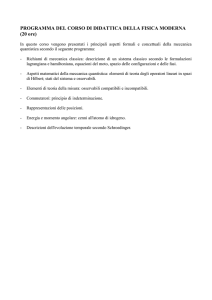
L’equazione (1.5) implica quindi che qualora noi, dopo aver effettuato una misura, sapessimo che il sistema numero 2 si trova nello stato |1i2 a causa dell’entanglement sapremmo
di conseguenza che il sistema numero 1 sarà nello stato |1i1 a prescindere dalla distanza
che separa le due particelle. Nella figura (1.1) si mostra graficamente questo fenomeno.
L’equazione (1.4) invece non implica nessuna correlazione univoca dei due sistemi.
Schrödinger commentò in [3] così l’entanglement:
Quando due sistemi, dei quali conosciamo gli stati sulla base della loro rispettiva
rappresentazione, subiscono una interazione fisica temporanea dovuta a forze note
che agiscono tra di loro, e quando, dopo un certo periodo di mutua interazione, i sistemi si separano nuovamente, non possiamo più descriverli come prima
dell’interazione, cioè dotando ognuno di loro di una propria rappresentazione.
9
Figura 1.1: Raffigurazione della correllazione non-locale di due quanti nello stato entangled
1.1.4
La riduzione del pacchetto d’onde
Come si evince dall’ultimo assioma dell’interpretazione ortodossa, in seguito ad
una misura effettuata sul sistema fisico lo stato che lo rappresenta non sarà più una
sovrapposizione di autostati della grandezza misurata, bensì uno solo degli autostati
relativi a tale grandezza fisica. Se, ad esempio, immaginiamo di misurare l’impulso di
una particella descritta da un pacchetto d’onda gaussiano, dopo la misura la funzione
d’onda della particella non sarà più un pacchetto d’onda, ma un autostato dell’impulso,
ossia un’onda piana.
Come spiega G.C.Ghirardi in [1]
La risposta ortodossa è che l’interazione con sistemi microscopici preserva le sovrapposizioni, quindi non è l’interazione dell’elettrone con un altro elettrone o un
quanto del campo elettromagnetico che costringe il sistema a "scegliere" il suo stato.
Tuttavia, secondo l’ortodossia, è la natura macroscopica dell’apparato che viene
innescato dalla particella o da quelle con cui essa ha interagito che porta a una
sola delle due situazioni possibili.
Il problema come già anticipato è quello di trovare una linea di demarcazione tra il livello
in cui l’evoluzione rappresentata dall’interazione delle particelle microscopiche è descritta
dall’equazione di Schrödinger e il livello a cui si deve far ricorso per descrivere i processi
di misura descritto invece dal postulato della riduzione del pacchetto.
10
1.2
1.2.1
Il processo di misura
Il processo ideale
La misurazione nella meccanica quantistica consiste sempre nell’interazione fra un
sistema microscopico e un sistema macroscopico (strumento di misura). Qualsiasi tentativo
di ottenere informazioni su sistemi microscopici richiede un processo di amplificazione
che correli strettamente le loro proprietà a situazioni macroscopicamente percepibili e
percettivamente distinguibili. Affrontiamo il problema della misura facendo riferimento a
quello che tecnicamente si indica come il processo ideale di misura di Von Neumann, che
per primo lo ha formulato in termini precisi [4]. Si consideri uno dei casi più semplici: un
generico stato |Ψi espresso dalla combinazione lineare di due stati |αi e |βi:
1
|Ψi = √ {|αi + |βi}.
2
(1.13)
Adesso s’ipotizzi uno strumento di misura ideale A (ovviamente macroscopico) che possa
indicare tre diverse posizioni: la posizione (+1) descritta dallo stato |A+1 i qualora legga
che il sistema si trovi nello stato |αi, la posizione (-1) descritta dallo stato |A−1 i qualora
legga che il sistema si trovi nello stato |βi e la posizione (0) descritta dallo stato |A0 i che
caratterizza l’apparecchio prima che esegua la misura.
In base all’equazione di Schrödinger l’evoluzione quantistica per i due stati, considerando
oltre al sistema microscopico anche quello dello strumento ideale macroscopico A, può
essere rappresentata (a meno di un fattore di fase):
|Ψ(0)i1 = |αi |A0 i ⇒ |Ψ(t)i1 = |αi |A+1 i ,
(1.14a)
|Ψ(0)i2 = |βi |A0 i ⇒ |Ψ(t)i2 = |βi |A−1 i .
(1.14b)
Per la linearità si avrà uno stato generico |Ψ(0)i iniziale che al tempo t = 0 sarà la
sovrapposizione di |Ψ(0)i1 e |Ψ(0)i2 :
1
|Ψ(0)i = √ {|αi |A0 i + |βi |A0 i},
2
(1.15)
il quale, dopo aver effettuato la misura al tempo t > 0, in base alle equazioni (1.14)
evolverà nello stato (a meno di un fattore di fase e ipotizzando per semplicità che i due
stati abbiano uguale energia):
1
|Ψ(t)i = √ {|αi |A+1 i + |βi |A−1 i}
2
11
(1.16)
che indica la sovrapposizione di due stati macroscopicamente differenti in quanto nel
primo l’apparecchio segna (+1) e nel secondo esso segna (-1).
La formulazione della (1.16) è stata fatta non considerando il collasso indotto dalla
riduzione del pacchetto esposto nell’assioma 5 dell’interpretazione di Copenaghen e
approfondito nella sezione 1.1.4. Questo è stato fatto perché la linearità, a cui la teoria
attribuisce validità illimitata, viene contraddetta dalla riduzione del pacchetto portando
quindi a sostenere che l’evoluzione del sistema che stiamo analizzando non è più governata
dalle leggi quantistiche, in altre parole la teoria non è in grado di spiegare la causa del
perché avviene quel peculiare processo di collasso quando interagiscono un misuratore
macroscopico ed un sistema microscopico.
Il problema della misura deriva dal fatto che l’atto pratico di misurazione va a favore
della riduzione del pacchetto e quindi contrasta con il risultato linerare elaborato nella
(1.16): un misuratore alla fine rileva un solo risultato definito.
Tutto ciò fa supporre che la teoria quantistica sia limitata e che quindi esista un confine
oltre il quale vigono le leggi classiche. La domanda che ci si pone diventa dunque: Questo
confine dove sta?
1.2.2
La catena di Von Neumann
Supponiamo che l’equazione (1.16) non descriva una proprietà fisica definita per
l’apparecchio macroscopico perché ancora non ci si è avvicinati al “confine” che delimita
il campo quantisitico da quello classico.
Von Neumann nel suo lavoro [4] suppone che per capire in quale posizione “classica” si
trova l’apparecchio A bisogna eseguire nuovamente una misura: mirata esclusivamente a
determinare la posizione segnata da A.
Esattamente come si è fatto per lo strumento A s’ipotizzi uno strumento di misura ideale
B (ovviamente macroscopico) che possa indicare tre diverse posizioni: la posizione (+1)
descritta dallo stato |B+1 i qualora legga che l’apparecchio A si trovi nello stato |A+1 i, la
posizione (-1) descritta dallo stato |B−1 i qualora legga che l’apparecchio A si trovi nello
stato |A−1 i e la posizione (0) descritta dallo stato |B0 i che caratterizza l’apparecchio
prima che esegua la misura.
La (1.16) in questo caso diviene:
1
|Ψ(t)i = √ {|αi |A+1 i |B0 i + |βi |A−1 i |B0 i}
(1.17)
2
e quindi l’evoluzione temporale della (1.17) per tempo t1 > t, ipotizzando sempre che gli
stati per semplicità abbiano uguale energia, diventa a meno di un fattore di fase:
1
|Ψ(t1 )i = √ {|αi |A+1 i |B+1 i + |βi |A−1 i |B−1 i},
(1.18)
2
che rappresenta di nuovo una sovrapposizione di stati con diverse proprietà macroscopiche
(che ora coinvolgono anche lo strumento B).
12
A questo si potrebbe ancora pensare che non si è raggiunto il "confine” tra mondo
quantistico e mondo classico e che quindi è necessaria un’ulteriore misura che accerti la
posizione dello strumento B. Si arriva così alla catena ideale di Von Neumann [4] che
coinvolge un numero sempre maggiore di sistemi che hanno lo scopo di descrivere lo stato
di quello che gerarchicamente lo precede.
Ad un tempo tn > t1 (sempre sotto le stesse ipotesi di uguale energia degli stati) a meno
di un fattore di fase la catena si può rappresentare come:
1
|Ψ(tn )i = √ {|αi |A+1 i |B+1 i , . . . , |Z+1 i + |βi |A−1 i |B−1 i , . . . , |Z−1 i}.
2
(1.19)
Se da una parte sembra che la situazione si complichi sempre di più e che l’entanglement
si diffonda come un’epidemia a contagiare via via un numero sempre più grande di
sistemi fisici, dall’altra tutti i sistemi che prendono parte al processo risultano avere
indici perfettamente correlati. Questo significa che qualora si raggiunga il livello nel quale
la meccanica quantistica cessa di valere allora tramite il postulato della riduzione del
pacchetto lo stato a destra della (1.19) andrà sostituito con uno dei termini della somma,
per ciascuno dei quali si ha una perfetta coerenza tra tutti gli esiti.
Interessante è vedere che il crescente numero di sistemi entangled nella catena di Neumann
sembra in un primo momento indurre ad una possibile soluzione al problema della
sovrapposizione degli stati macroscopici: se si considera un ensemble di sistemi preparati
in maniera identica, su cui vengono fatte le stesse misure ognuna avente una propria
frequenza, per la legge dei grandi numeri ci si avvicinerà sempre di più alle probabilità
teoriche.
La domanda che ora ci si può porre è la seguente: “È possibile distinguere se il processo in
esame è governato dall’equazione lineare di evoluzione o dalla riduzione del pacchetto?” o
meglio “quali sono le condizioni che rendono indistinguibili la teoria lineare dagli ensemble
statistici formati dal postulato di riduzione del pacchetto?”
G.C.Ghirardi in [1] risponde a tali quesiti dicendo che non risulta possibile distinguere le
due situazioni che ci interessano:
1. Se non risulta possibile per quanto riguarda l’apparato di misura A misurare
osservabili i cui operatori associati non commutano.
2. Se si limitano le proprie considerazioni ad un osservabile relativo ad un solo sottosistema (ad esempio la sola osservabile indice dell’apparecchio, come avviene
generalmente durante la misura).
3. Se si ignora uno dei costituenti della catena (riferendosi alla catena di von Neumann)
o si suppone che su di esso sia impossibile misurare osservabili incompatibili.
Una distinzione tra stato entangled e miscela richiederebbe, quindi, esperimenti
di correlazione che coinvolgano tutti i costituenti del sistema macroscopico compreso
13
l’ambiente circostante, e questo porta ad un’ovvia difficoltà pratica anche se in teoria
fattibile.
Nonostante queste considerazioni il problema della misura nella meccanica quantistica
rimane inalterato in quanto qualora la validità della teoria fosse illimitata si arriverebbe
ad una logica che contrasta con l’esperienza comune. D’altra parte qualora fosse limitata
si dovrebbe avere un confine (come la velocità della luce lo è per la relatività) che indichi
quale sia la linea di demarcazione fra sistemi che ubbidiscono a leggi diverse (ossia
classiche e quantistiche).
1.2.3
Il gatto di Schrödinger
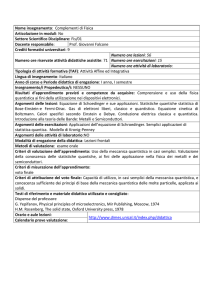
Nel 1935 Erwin Schrödinger allo scopo di evidenziare i risultati paradossali dell’interpretaziane di Copenaghen propose un esperimento immaginario in cui un gatto viene
messo in una scatola al cui interno c’è una fiala sigillata con del veleno. Grazie ad un
meccanismo ben costruito la fiala potrebbe rompersi. Dato che nessuno sa se e quando, a
seguito di un processo quantistico,il veleno verrà rilasciato, prima che si apra la scatola il
gatto è sia vivo che morto.
Nella figura (1.2) è rappresento graficamente il marchingegno immagiario appena esposto.
In [5] Schrödinger espone così il suo esperimento:
Si possono anche costruire casi del tutto burleschi. Si rinchiuda un gatto in una
scatola d’acciaio insieme alla seguente macchina infernale (che occorre proteggere
dalla possibilità d’essere afferrata direttamente dal gatto): in un contatore Geiger
si trova una minuscola porzione di sostanza radioattiva, così poca che nel corso
di un’ora forse uno dei suoi atomi si disintegrerà, ma anche, in modo parimenti
probabile, nessuno; se l’evento si verifica il contatore lo segnala e aziona un relais di
un martelletto che rompe una fiala con del cianuro. Dopo avere lasciato indisturbato
questo intero sistema per un’ora, si direbbe che il gatto è ancora vivo se nel frattempo
nessun atomo si fosse disintegrato, mentre la prima disintegrazione atomica lo
avrebbe avvelenato. La funzione Ψ dell’intero sistema porta ad affermare che in
essa il gatto vivo e il gatto morto non sono degli stati puri, ma miscelati con uguale
peso.
Interessante è vedere come Schrödinger sia riuscito a creare con un esperimento immaginario a coinvolgere le conseguenze della teoria quantistica al mondo macrospico
rappresentato dal gatto.
Il premio nobel Haroche commentò in [6] così tale paradosso:
Schrödinger descrisse uno diabolico congegno per cui un felino diventerebbe entangled
con un singolo atomo. Il sistema sarebbe descritto da una funzione d’onda che
rappresenta, al tempo stesso, il gatto vivo con l’atomo eccitato e il gatto morto
14
Figura 1.2: Raffigurazione dell’esperimento immaginario del gatto di Schrödinger
con l’atomo tornato nello stato fondamentale, dopo che il suo decadimento ha
innescato il dispositivo letale. Gli esperti di fisica quantistica obietteranno che il
gatto è un sistema complesso e aperto, che non può, neanche all’inizio del crudele
esperimento, essere descritto da una funzione d’onda. Il ragionamento, tuttavia,
solleva un’importante domanda: Perché, e come, la stranezza del mondo quantistico
scompare nei sistemi macroscopici?.
L’esperimento del gatto è ovviamente collegato al problema della misura. Come
già discusso precedentemente il postulato di riduzione del pacchetto afferma che, se un
sistema quantistico (come l’atomo dell’esperimento) si trova in una sovrapposizione della
forma |Ai + |Bi, una sua misura "costringe" il sistema a passare definitivamente nello
stato |Ai o |Bi. Da quel momento, la sovrapposizione è sparita e si parla di "collasso della
funzione d’onda". L’esatta modalità del "collasso" è un problema che l’interpretazione
di Copenaghen lascia aperto. Ricordo che la "misura" nell’ambito quantistico consiste
nell’interazione entangled tra un apparato macroscopico (il misuratore) ed un sistema
microscopico. Nel nostro caso, il gatto gioca il ruolo dell’apparato sperimentale, poiché
"registra" lo stato dell’atomo. Allora, la presenza del gatto fa sì che la sovrapposizione in
cui si trova l’atomo venga "trasferita" al sistema complessivo (atomo + gatto). L’atomo,
dunque, non è più in una sovrapposizione - così come non lo è il gatto. D’altra parte,
rimane un problema da affrontare: chi ha mai visto un gatto in una sovrapposizione di
vivo e morto?. Questo problema permane, naturalmente, anche se il gatto è sostituito da
un apparato sperimentale inanimato.
15
Capitolo 2
Interpretazioni al problema di
misura
È importante innanzitutto cercare di capire perché esiste una questione interpretativa
riguardante le teorie quantistiche. Nonostante in molti hanno avuto modo di verificarne
le risultanze teoriche in via sperimentale non sono pochi coloro che invece affermano che
il significato e le implicazioni della teoria quantistica non siano state ancora del tutto
comprese dalla comunità scientifica. Le diverse interpretazioni della meccanica quantistica
si differenziano su diversi punti tra cui principalmente la considerazione dei principi su
cui si fonda, deterministici o meno, l’influenza sulla realtà e sulle difficoltà nei processi di
misurazione scientifica degli esperimenti. Vale la pena soffermare l’attenzione sulle più
rilevanti interpretazioni diverse da quella ortodossa ovvero le teorie a variabili nascoste,
la teoria del multimondi e la teoria del collasso a causa della presa di coscienza da parte
dell’osservatore.
2.1
Le teorie a variabili nascoste
La teoria della meccanica quantistica è completa? Il vettore di stato rappresenta da
solo la più accurata specificazione possibile di un sistema fisico individuale? Se a queste
domande si dovessero dare risposte negative ci si addentrerebbe in quella che viene definita
una teoria a variabili nascoste.
Per variabili nascoste s’intendono quei parametri1 che qualora conosciuti consentirebbero
di determinare in modo preciso il valore di qualsiasi osservabile del sistema.
In particolare in queste teorie “posizione dell’indice dell’apparecchio”avrà sempre un
valore definito per ogni sistema, ed esso dipenderà dal valore delle variabili nascoste che
lo caratterizzano.
1
Questi parametri potrebbero essere sperimentalmente non reperibili, per questo si utilizza l’aggettivo
“nascoste”
16
Al fine di vedere l’applicabilità di questa teoria al problema della misura conviene riferirci
a quella che ancora oggi è considerata la teoria a variabili nascoste meglio formulata: la
meccanica bohmiana.
2.1.1
La teoria dell’onda pilota di Bohm
Partendo dall’ipotesi che ciascun sistema fisico elementare sia composto da un corpuscolo e da un’onda che lo guida (idea che va anche sotto il nome di dualismo oggettivo
onda-particella), Bohm ipotizzò in [7] che il movimento del corpuscolo sotto la guida
dell’onda avviene in accordo ad una legge che ha la forma della seconda legge di Newton
della meccanica classica. La principale differenza è che la particella è soggetta, oltre
che ad una forza classica, anche ad una forza “quantistica”, legata ad una forma di
energia chiamata potenziale quantico. Questa denominazione deriva dal fatto che nell’espressione del potenziale quantico è presente la costante di Planck e c’è una dipendenza
dalla funzione d’onda. La caratteristica principale della teoria di Bohm, che consente
di fornire una descrizione causale dei processi atomici, consiste nel fatto che la funzione
d’onda agisce come un’onda pilota che guida la particella corrispondente, attraverso
l’azione del potenziale quantico, nelle regioni dove l’onda è più intensa. Nonostante il
carattere intrinsecamente deterministico della teoria, le sue previsioni sono probabilistiche
poiché non è possibile avere una conoscenza esatta delle condizioni iniziali sulle variabili
dinamiche del sistema. Ciò è dovuto essenzialmente al principio di indeterminazione, il
quale rimane comunque un limite intrinseco al processo di misura.
Le assunzioni della teoria (scritte per semplicità per una singola particella) sono:
1. La funzione d’onda Ψ soddisfa l’equazione di Schrödinger;
2. Le particelle evolvono secondo l’equazione guida
~ x, t);
p~(~x, t) = ∇S(~
(2.1)
3. Non si possono predire e controllare con precisione le variabili dinamiche delle
particelle, ma si ha, in pratica, un insieme statistico con densità di probabilità
P (~x, t) = |Ψ(~x, t)|2 .
Per capire come Bohm abbia motivato la sua ipotesi conviene partire dall’evoluzione
temporale descritta dall’equazione di Schrödinger. Consideriamone il caso per un sistema
a molte particelle:
i~
∂ψ(x1 , x2 , ..., t) X −~2 2
=
∇i ψ(x1 , x2 , .., t) + V (x1 , x2 , ..)ψ(x1 , x2 , ..., t).
∂t
i 2mi
(2.2)
La funzione d’onda può essere scritta nella forma polare:
ψ(x1 , x2 , ..., t) =
q
ρ(x1 , x2 , .., t)eiS(x1 ,x2 ,...,t)/~ ,
17
(2.3)
dove la densità di probabilità ρ(x1 , x2 , ..., t) è
ρ(x1 , x2 , .., t) = |ψ(x1 , x2 , .., t)|2
(2.4)
Sostituendo la (2.3) alla (2.2) e separando parte reale e parte immaginaria si ottengono
le seguenti due equazioni:
−
∂ρ X
∇i S
=
)
∇i · (ρ
∂t
mi
i
X ~2
∇2 ρ
∇i ρ
∂S
i −
=V −
−
∂t
2ρ
2ρ
i 2mi
(2.5)
!2
+
X
i
1
(∇i S)2 .
2mi
(2.6)
La (2.5) è una equazione di continuità che esprime la conservazione di probabilità, mentre
la (2.6) esprime l’energia totale come somma dell’energia potenziale, del potenziale
quantistico e delle energie cinetiche.
Riscriviamo l’equazione (2.6) nella forma:
"
#
X 1
∂S
=−
(∇i S)2 + V + Q ,
∂t
2m
i
i
(2.7)
dove si è indicato con Q il “potenziale quantistico”,
Q=−
X
i
∇i ρ
~2 ∇2i ρ
−
2mi
2ρ
2ρ
!2
.
(2.8)
Ricordando l’equazione di Hamilton-Jacobi:
∂S
= −H
∂t
(2.9)
vediamo che la (2.7) rappresenta un’equazione di Hamilton-Jacobi generalizzata dove,
accanto al potenziale classico V, appare il potenziale quantistico Q.
Dunque per ricapitolare le particelle si muovono lungo le traiettorie del moto descritte
dall’equazione (2.1) ma l’azione S è determinata dalla (2.6) in cui compare oltre all’Hamiltoniana classica anche il “potenziale quantistico” Q.
È importante notare che, sebbene V possa essere spazialmente limitato, il potenziale
quantistico può trasportarne gli effetti anche in regioni dello spazio dove esso è nullo.
Mentre classicamente in tali regioni sono possibili solo moti rettilinei uniformi, in meccanica quantistica, per via della presenza del potenziale quantistico, si avrà una varietà di
moti dipendenti dalla forma della funzione d’onda. Attraverso questa formulazione si ha
anche una chiara visualizzazione del limite classico: nel limite ~ → 0 anche Q → 0 e la
(2.7) si riduce alla nota equazione di Hamilton-Jacobi della meccanica classica.
18
La particella si comporta in pratica come una nave che arriva al porto grazie alla potenza
dei suoi motori (vale a dire all’azione dei campi classici che conosciamo) ma sotto la guida
di un radar (vale a dire il potenziale quantico) che le indica la strada da seguire. Nell’ambito della teoria di Bohm, è proprio il potenziale quantico a determinare la non località
dei processi microscopici e la comunicazione istantanea tra le particelle subatomiche.
Inoltre, mentre ad ogni particella è sempre associata un’onda pilota, non si verifica la
situazione opposta: esistono infatti onde definite «vuote». Le onde vuote sono dotate
d’energia e momento, ma non sono associate ad alcuna particella. In numerose situazioni
d’interesse fisico, l’onda associata alla particella si divide in più parti aventi sovrapposizione spaziale trascurabile. Di queste, un’onda funge da guida alla particella e resta associata
ad essa, mentre le altre sono onde vuote. Un’onda vuota, dal punto di vista fisico, è
un’onda a tutti gli effetti e se rientrasse in contatto con la particella ne influenzerebbe
nuovamente il moto. Tuttavia i tentativi sperimentali di rivelare l’esistenza di onde vuote
con metodi ottici non hanno dato esito. Le onde pilota, se esistono, sono dotate d’energia
e momento non misurabili con le tecniche d’interferometria ottica disponibili. Questo
risultato, benché non definitivo, rende difficile considerare l’onda pilota come un’entità
fisica.
2.1.2
La meccanica bohmiana e la misura
L’interpretazione di Bohm risolve il problema della misura in modo semplice, dato
che durante l’atto della misura non si ha un vero e proprio collasso della funzione d’onda,
con successiva localizzazione della particella, ma semplicemente viene rivelata la sua
preesistente posizione. In altre parole la particella possiede sempre una definita posizione
che varia con continuità, indipendentemente dal fatto che venga effettuata una misura,
proprio perché le posizioni delle particelle assumono un carattere non contestuale nella
teoria. Altre osservabili invece devono assumere un carattere intrinsecamente contestuale,
come l’impulso e lo spin; questo fatto è dovuto proprio al teorema di Kochen-Specker [8],
il quale stabilisce l’impossibilità di avere un modello a variabili nascoste non-contestuale.
Ovvero non si può assumere che i valori di tutte le osservabili misurate erano già posseduti
dal sistema prima della misura. L’interazione con l’apparato o col resto del sistema può
aver cambiato i valori in modo impredicibile.
2.2
La teoria dei multimondi
A metà del 1900 H.Everett III pubblicò un lavoro [9] in cui si proponeva una soluzione
al processo di misura nella meccanica quantistica introducendo la teoria del «multiverso».
Questa teoria assume che la realtà, anche quella macroscopica, è rappresentata interamente
dalla funzione d’onda e quindi evolve secondo l’equazione di Scrhrödinger. Everett propose
che chiunque esamini l’evoluzione d’un sistema non è indipendente da tale evoluzione
19
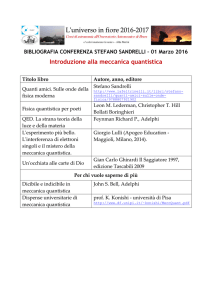
Figura 2.1: Rappresentazione del modello a multimondi del paradosso del gatto di Schrödinger
ma evolve insieme al sistema stesso. Il tema della correlazione è un argomento già
affrontato precedentemente ma la vera peculiarità della teoria del multiverso è che tutti
sistemi coinvolti nell’evoluzione (compresi quindi pure quelli macroscopici) anche se
corrispondono a situazioni percettivamente incompatibili vengono considerati reali ed
esistenti. Perché non riusciamo allora a percepire ad esempio che uno stato macroscopico
come la posizione di una sedia (esempio più volte usato da Ghirardi in [1]) sia la
sovrapposizione di due luoghi differenti nello stesso istante? In fondo se non esiste un
confine tra microscopico e macroscopico non avverrà mai il collasso della funzione d’onda
predetto dall’interpretazione di Copenaghen. Everett risolse questa domanda spiegando
che tutti gli stati sovrapposti della funzione d’onda appartengono ognuno ad un mondo
proprio tra i quali non vi è nessuna interazione. Quando proviamo a misurare tali stati,
essendone correlati, apparterremmo al mondo corrispondente allo stato misurato. Nel
paradosso del gatto di Schrödinger, come mostrato nella figura (2.1), l’universo si duplica
in uno in cui il gatto è vivo e in un altro in cui il gatto è morto.
Per superare alcune critiche rivolte all’interpretazione a molti mondi Albert propose una
soluzione alternativa [10]: si considera un solo mondo e un solo esempio di osservatore
ma lo si dota di un’infinità di menti, ciascuna delle quali percepisce uno diverso degli
esiti di ogni processo in cui possono darsi esiti perecettivamente diversi. Questo modello
è stato chiamato «foliazioni delle menti»
20
2.3
Wigner e il collasso con la coscienza
Ispirato ai lavori di Von Neumann [4] di cui si è già discusso nel paragrafo (1.2.2)
Wigner riprese l’equazione (1.19):
1
|Ψ(tn )i = √ {|αi |A+1 i |B+1 i , . . . , |Z+1 i + |βi |A−1 i |B−1 i , . . . , |Z−1 i}
2
e considerò come ultimi misuratori invece che due apparecchi Y e Z due persone coscienti:
lui stesso ed un suo amico.
In questo esperimento mentale, Wigner immagina che, in sua assenza, un amico compia
l’esperimento del gatto di Schrödinger; Wigner, poi, verrà a sapere se il gatto sia vivo o
morto solo al proprio ritorno al laboratorio.
Ci sono, dunque, due sistemi differenti: il sistema "scatola", che contiene il gatto di
Schrödinger e la fiala con il cianuro, e il sistema "laboratorio", all’interno del quale c’è
l’amico di Wigner. Qualora il gatto dovesse essere morto l’amico diventa triste, nel caso
contrario felice.
Il punto cruciale dell’esperimento mentale è nella seguente domanda: al ritorno Wigner,
vedrà che lo stato del sistema "laboratorio" sarà rappresentato dalla sovrapposizione tra
«gatto morto e amico triste» e «gatto vivo e amico felice» che collasserà non appena il
fisico verrà a conoscenza del risultato (diventando, quindi, un osservatore), oppure troverà
che la sovrapposizione è stata dissolta già da prima a causa della presenza dell’amico?
Nel celebre paradosso del gatto, si afferma che la scatola non si trovi in uno stato definito,
almeno dal punto di vista di un osservatore esterno, finché non viene aperta. Analogamente dovrebbe essere per il laboratorio (osservatore esterno del quale, è Wigner),
visto che, concettualmente, non c’è alcun motivo per supporre diversamente; questo
vuol dire che, finché Wigner è lontano, deve valere la sovrapposizione tra i due stati del
laboratorio, quelli di cui sopra si è fatto menzione: "gatto vivo e amico felice" e "gatto
morto e amico triste". Il punto è che nel laboratorio c’è l’amico del fisico, che, aprendo la
scatola mentre quest’ultimo è lontano, svolge il ruolo di osservatore del sistema "scatola"
e fa "collassare" lo stato di quest’ultima su uno dei due possibili ("gatto vivo" e "gatto
morto"); per logica, allora, poiché l’indeterminazione dello stato del sistema "laboratorio"
è dovuta solo all’indeterminazione del sistema "scatola", si ha che anche lo stato del
sistema "laboratorio" dovrebbe collassare già prima che Wigner ritorni, in contraddizione
con quanto appena affermato. Qui sta il paradosso.
Esposto questo problema Wigner si chiede se esiste qualche elemento caratteristico nella
catena che possa permettere di individuare uno stadio in cui risulti ragionevole porre la
riduzione e l’unico punto che può considerarsi peculiare è quello che coinvolge il passaggio
da stati fisici puri alla loro percezione ovvero la coscienza.
Assunto quindi che le leggi fisiche e le percezioni coscienti vadano messe su due piani
differenti Wigner attribuisce all’osservatore un ruolo fondamentale e non più passivo nella
fisica quantistica dando degli spunti filosofici riguardo a quanto la consapevolezza possa
21
influenzare il mondo a noi circostante.
22
Capitolo 3
La teoria GRW
3.1
Premessa
Al fine di risolvere le difficoltà del problema della misura nella meccanica quantistica
Ghirardi, Rimini e Weber proposero nel 1985 una teoria [2] in cui a venire modificata
fu proprio l’equazione di Schrödinger. Lo studio di questa modifica non fu affatto facile
in quanto bisognava unificare la teoria quantistica con la contraddittoria esperienza
macroscopica senza però apportare cambiamenti apprezzabili al mondo microscopico.
La base di questa teoria si fonda assumendo che ogni costituente del mondo fisico dotato
di massa (elettroni, protoni, neutroni e così via) oltre ad ubbidire alla dinamica lineare di
Schrödinger è soggetto, a tempi casuali e con una certa frequenza media λ, a dei processi
spontanei di localizzazione spaziali.
Come riassumono G.C.Ghirardi in [1] e J.S.Bell in [11] la teoria GRW cerca di porre
rimedio alla mancanza nell’interpretazione di Copenaghen riguardo al motivo per cui
avviene il collasso della funzione d’onda intendendo questo processo come assolutamente
naturale e non dovuto all’interazione con lo strumento di misura o da azioni di osservatori
coscienti.
Più in generale, data una funzione d’onda spaziale di N particelle Ψ(t, r1 , r2 , ..., rN ), la
teoria GRW afferma che, oltre ad evolversi nel tempo secondo l’equazione di Schrödinger,
quest’ultima possa occasionalmente fare un "salto" con probabilità nell’unità di tempo
uguale a N /τ , cioè decadere in una nuova funzione d’onda Ψ0 . La lettera τ indica una
nuova costante naturale con le dimensioni di un tempo: per rendere conto del fatto che
non è mai stata osservata una localizzazione spontanea in sistemi microscopici (in cui il
valore di N è piccolo), Ghirardi, Rimini e Weber propongono che τ debba assumere un
valore estremamente grande (dell’ordine di 1016 secondi). Per i sistemi macroscopici invece N ' 1023 e questo comporta, essendo N /τ grande, ad un’alta probabilità di localizzarsi.
23
3.2
Operatore densità
Il lavoro di GRW [2] comincia considerando l’evoluzione temporale dell’operatore
densità, ragion per cui di seguito esso verrà descritto seguendo la definizione tratta da
[12] e [13].
3.2.1
Definizione dell’operatore densità
L’operatore densità, in meccanica quantistica, è un operatore che può essere utilizzato
per descrivere un sistema fisico, sia che si trovi in uno stato puro1 , sia che si trovi in una
miscela statistica2 . Supponiamo che il sistema sia in una miscela statistica, ovvero che
possa trovarsi in uno degli stati |ψi i con probabilità pi tali che
X
pi = 1.
i
L’operatore densità è definito come
ρ=
X
pi |ψi ihψi |.
i
Si tratta quindi della somma, pesata con le probabilità, degli operatori di proiezione sugli
stati | ψi i.
Se il sistema è in uno stato puro |ψi, la somma si riduce al proiettore |ψihψ|. La matrice
densità è la matrice che rappresenta l’operatore densità in una certa base ortonormale
|un i. Gli elementi di matrice sono dati dall’espressione
ρmn =
X
pi hum |ψi ihψi |un i.
i
A rigore, quindi, la matrice densità è una rappresentazione dell’operatore densità dipendente dalla base scelta. In pratica, tuttavia, i due concetti sono spesso utilizzati in
maniera intercambiabile.
Sia ora A un operatore che rappresenta una grandezza osservabile del sistema. Se il
sistema è in una miscela statistica, la misura dell’osservabile A può dare risultati diversi,
1
Una sovrapposizione coerente o stato puro corrisponde all’esistenza di un osservabile la cui misura
sul sistema darebbe luogo ad esiti non aleatori e in particolare darebbe come risultato certo l’autovalore
corrispondente all’autostato dell’operatore autoaggiunto.
2
In meccanica quantistica, una miscela statistica o stato misto è lo stato di un sistema che non si
trova in una sovrapposizione coerente. Lo stato di un sistema così definito non corrisponde all’autostato
di un operatore autoaggiunto, che rappresenta l’osservabile fisica, e l’applicazione di quest’ultimo non dà
un risultato univoco (l’autovalore corrispondente) ma una distribuzione di probabilità nello spazio delle
fasi, usata per descrivere un ensemble di sistemi di cui non si conosce lo stato singolarmente. Il termine
nasce in diretta contrapposizione con quest’ultimo ed è dunque usato soltanto in meccanica quantistica,
ma di fatto rappresenta un concetto già noto in meccanica classica
24
a seconda dello stato |ψi i in cui il sistema si trova. Il valore medio di A per la miscela
statistica è allora la somma dei valori di aspettazione di A per ogni stato puro |ψi i, pesata
con le probabilità pi :
hAi =
=
P
=
P
=
P
P
i
i,n,m
pi hψi |A|ψi i =
pi hψi |un i hun | A |um i hum |ψi i =
(3.1)
n,m
hum | ρ |un i hun | A |um i =
m hum |ρA|um i
= tr(ρA)
ovvero la traccia del prodotto tra ρ e A. In altre parole, Si può inoltre dimostrare che:
1. ρ = ρ† , l’operatore densità è Hermitiano
2. tr(ρ) = 1, poiché
P
i
pi = 1
3. Gli autovalori di ρ sono non negativi
4. tr(ρ2 ) ≤ 1
5. L’operatore densità per uno stato puro è idempotente, cioè ρ2 = ρ
6. Se tr(ρ2 ) = 1, si ha ρ2 = ρ e quindi uno stato puro.
3.2.2
Matrice di densità ridotta
Si consideri un sistema bipartito, intendendo con questo termine un sistema composito
formato da due sottosistemi, che indicheremo con A e B. Lo spazio di Hilbert complessivo
è:
H = HA ⊗ HB .
Indicando la matrice densità del sistema composito con ρAB = ρA ⊗ ρB , possiamo definire,
a partire da essa, una nuova matrice densità relativa ad uno solo dei due sottosistemi
e detta matrice densità ridotta. La matrice densità ridotta del sistema A è data dalla
relazione:
ρA = trB (ρAB )
(3.2)
e analogamente
ρB = trA (ρAB )
(3.3)
dove con trA s’intende la traccia fatta sui gradi di libertà del sistema A e con trB quella
fatta sul sistema B.
Per dimostrare la (3.2) si consideri un set completo di stati ortonormali ad esempio in HB
25
{|ΨB1 i , . . . , |ΨBn i} ∈ HB .
La traccia su B dell’operatore ρAB è:
trB (ρAB ) =
=
Pn
i=1
Pn
i=1
hΨBi | ρAB |ΨBi i =
hΨBi | ρA ρB |ΨBi i =
(3.4)
= ρA
Pn
i=1 hΨBi | ρB |ΨBi i =
= ρA tr ρB = ρA .
La matrice densità ridotta ha tutte le caratteristiche di una matrice densità (nello spazio
del sottosistema).
3.2.3
L’evoluzione temporale dell’operatore densità
L’evoluzione temporale nella meccanica quantistica è descritta dall’equazione di
Schrödinger:
d
i~ |Ψi = Ĥ |Ψi .
(3.5)
dt
Calcolandone il complesso coniugato si ottiene:
−i~
d
hΨ| = hΨ| Ĥ.
dt
(3.6)
La derivata temporale dell’operatore ρ nel caso della miscela statistica vale:
i~
d
d X
ρ = i~
pi |ψi ihψi | =
dt
dt i
!
= i~
X
i
=
X
i
pi
!
d
d
|ψi i hψi | + |ψi i
hψi | =
dt
dt
pi Ĥ |ψi i hψi | −
X
pi |ψi i hψi | Ĥ = −[ρ, Ĥ],
(3.7)
i
dove con [ρ, Ĥ] si intende il commutatore di ρ e Ĥ. L’evoluzione temporale dell’operatore
densità sarà quindi rappresentata dall’equazione:
d
i
ρ = − [Ĥ, ρ].
dt
~
26
(3.8)
3.3
Il lavoro di GRW
L’idea di base di questo lavoro è riuscire ad inserire nell’evoluzione di Schrödinger
termini stocastici e non lineari in modo da passare da uno stato puro ad una miscela
statistica. Il vantaggio di questo passaggio è che, qualora il sistema si trovi in una miscela
statistica, nella rappresentazione delle coordinate dell’operatore densità i termini non
diagonali scompaiono, o detto in maniera semplice, la sovrapposizione lineare scompare.
Analizziamo nel dettaglio questo fatto, lavorando in una dimensione q, nella rappresentazione delle coordinate l’operatore ρ viene scritto
hq1 | ρ |q2 i ,
(3.9)
dove q1 e q2 sono punti della coordinata q. Lo stato |ψi viene scritto come sovrapposizione
degli stati |ψ1 i e |ψ2 i che indicano quando il sistema si trova rispettivamente in q1 e q2
|ψi = c1 |ψ1 i + c2 |ψ2 i
c1 , c2 ∈ C.
(3.10)
1. Si consideri il caso in cui il sistema è in uno stato puro |ψi, sappiamo quindi che
l’operatore densità ρ sarà il proiettore |ψihψ|. Gli elementi non diagonali della
matrice (3.9) in questo caso saranno diversi da zero poiché:
hq1 | ρ |q2 i = hq1 |ψihψ |q2 i = c1 c∗2 6= 0.
(3.11)
2. Nel caso in cui il sistema si trova in una miscela statistica l’operatore densità sarà
scritto come ρ = p1 |ψ1 i hψ1 | + p2 |ψ2 i hψ2 |, poiché p1 e p2 indicano la probabilità che
si verifichi rispettivamente o lo stato |ψ1 i o lo stato |ψ2 i gli elementi non diagonali
della matrice (3.9) in questo caso saranno nulli infatti:
hq1 | ρ |q2 i = p1 hq1 |ψ1 ihψ1 |q2 i + p2 hq1 |ψ2 ihψ2 |q2 i = 0.
3.3.1
(3.12)
Analisi dei microsistemi
I tre fisici italiani Ghirardi,Rimini e Weber nel loro lavoro “GRW” [2] considerarono
inizialmente un sistema composto da una singola particella che si muove in una dimensione
spaziale q. Indicando con λ la frequenza con cui avviene una localizzazione spontanea
modificarono la (3.8) nella forma:
d
i
ρ = − [Ĥ, ρ] − λ(ρ − T [ρ]),
dt
~
(3.13)
dove T [ρ] indica l’operatore:
T [ρ] =
1 Z +∞
α 2
π
α
2
α
2
dx e− 2 (q̂−x) ρ e− 2 (q̂−x) ,
−∞
27
(3.14)
α è una costante con dimensione inversa al quadrato della lunghezza, q̂ è l’operatore
posizione.
Nella rappresentazione delle coordinate l’operatore T [ρ] è espresso da:
0
00
hq | T [ρ] |q i =
1 Z +∞
α 2
π
i
αh
dx exp − (q 0 − x)2 + (q 00 − x)2
2
−∞
hq 0 | ρ |q 00 i ,
(3.15)
cosicché possa diventare facilmente:
0
00
hq | T [ρ] |q i =
1 Z +∞
α 2
π
−∞
i
αh
2
2
dx exp − 2x2 + q 0 + q 00 − 2(q 0 − q 00 )
2
hq 0 | ρ |q 00 i .
(3.16)
Ricordando la risoluzione dell’integrale di Gauss:
Z +∞
−bx2 +cx+f
ae
r
dx = a
−∞
!
π
c2
exp
+f .
b
4b
(3.17)
Con semplici passaggi algebrici si ottiene:
α
0
hq 0 | T [ρ] |q 00 i = e− 4 (q −q
00 )2
hq 0 | ρ |q 00 i .
(3.18)
Adesso si consideri il termine non Hamiltoniano λ(ρ − T [ρ]) della (3.13) che nella
rappresentazione di coordinate diventa:
α
0
λ hq 0 | ρ − T [ρ] |q 00 i = λ ( 1 − e− 4 (q −q
00 )2
) hq 0 | ρ |q 00 i .
(3.19)
Dalla (3.19) si vede che per distanze molto vicine |q 0 − q 00 | √1α , cioè quando q 0 ' q 00 , gli
elementi di matrice non Hamiltoniani tendono ad annullarsi facendo quindi evolvere il
sistema come stabilito dall’equazione di Schrödinger.
Differentemente se le distanze sono sufficientemente lontane |q 0 − q 00 | ≥ √1α la parte non
Hamiltoniana non scompare e influenzerà la soluzione della (3.13) sotto forma di una
funzione esponenziale approssimabile a e−λt .
Questo fattore di smorzamento (che verrà approfondito nella sezione seguente) è molto
importante poiché per gli stati separati da una distanza più larga di √1α in un intervallo
di tempo di ordine τ con
1
τ= ,
(3.20)
λ
si passerà da una sovrapposizione coerente ad una miscela statistica.
In altre parole lo stato del sistema subirà spontaneamente una localizzazione dopo aver
raggiunto un tempo di ordine τ . Questa è l’innovazione del lavoro GRW, ipotizzare che
la localizzazione sia un fenomeno spontaneo indipendente dall’atto di misura.
28
3.3.2
Il fattore di smorzamento F(k, q, t)
2
~
Si consideri l’equazione (3.13) nel caso di una particella libera, per cui Ĥ = − 2m
∇2 .
Nella rappresentazione delle coordinate avremo:
"
#
∂ 0
i~ ∂ 2
∂2
00
0
00
−α
(q 0 −q 00 )2
4
hq | ρ(t) |q i =
−
hq
|
ρ(t)
|q
i−λ(1−e
) hq 0 | ρ(t) |q 00 i . (3.21)
2
2
0
00
∂t
2m ∂q
∂q
Si può esprimere la soluzione della (3.21) introducendo la quantità hq 0 | ρS (t) |q 00 i rappresentante la soluzione dell’equazione di Schrödinger (ossia con λ = 0) soddisfacente le
stesse condizioni iniziali. Allora la soluzione della (3.21) è:
hq 0 | ρ(t) |q 00 i =
Z ∞
iky
1 Z∞
dk
dy e ~ F(k, q 0 − q 00 , t) hq 0 + y| ρS (t) |q 00 + yi ,
2π~ −∞
−∞
dove
(3.22)
α
kτ 2
1Z t
dτ e 4 (q− m )
.
(3.23)
F(k, q, t) = exp −λt 1 −
t 0
Nell’appendice (B) si mostra come la soluzione (3.22) si è ottenuta.
Studiamo alcune proprietà della funzione F(k, q, t) che ci saranno utili in seguito; si trova
facilmente che:
F(0, 0, t) = 1,
Fkq (0, 0, t) =
Fk (0, 0, t) = 0,
αλ 2
t,
4m
Fq (0, 0, t) = 0,
Fkk (0, 0, t) = −
Fkk (0, 0, t) = −
αλ
t,
2
αλ 3
t,
6m2
(3.24)
dove i pedici segnano la derivata rispetto alle variabili indicate.
Per capire l’evoluzione dinamica descritta dall’equazione (3.21) valutiamo adesso, facendo
uso delle equazioni che vanno dalla (3.22) alla (3.24) e della proprietà dell’operatore
densità (3.1), il valore medio e la propagazione degli operatori posizione q e impulso p
per un qualunque valore assegnato a t.
Il pedice S sarà messo per indicare il valore associato all’evoluzione pura di Schrödinger,
ovvero quando si pone λ = 0 nella (3.21).
Prima di proseguire riporto tre proprietà della δ di Dirac che saranno utili in seguito.
Z +∞
f (y)δ(y) d y = f (0),
(3.25)
−∞
Z ∞
−∞
Z +∞
−∞
dK eiKy K = i
∂ Z∞
∂
dK eiKy = 2πi δ(y),
∂y −∞
∂y
Z +∞
d
d
+∞
δ(y)φ(y) d t = [δ(y)φ(y]−∞ −
δ(y)
φ(y) d t.
dt
dy
−∞
29
(3.26)
(3.27)
Nella (3.27) il termine [δ(y)φ(y)]+∞
−∞ si annulla grazie alla definizione della δ.
La media della posizione è:
hq̂i = tr[q̂ρ(t)] =
Z ∞
dq hq| qρ(t) |qi =
Z ∞
−∞
=
dq q hq| ρ(t) |qi =
−∞
Z ∞
Z ∞
iky
1 Z∞
dk
dy
dq (q − y)e ~ F(k, 0, t) hq| ρS (t) |qi .
2π~ −∞
−∞
−∞
Sviluppando F (k, 0, t) fino al primo ordine in k (vedremo in seguito che l’approssimazione
è esatta) si ottiene:
Z ∞
Z ∞
iky
1 Z∞
dk
dy
dq (q − y)e ~ [F(0, 0, t) + k Fk (0, 0, t)] hq| ρS (t) |qi .
2π~ −∞
−∞
−∞
(3.28)
Ponendo il cambio di variabili k/~ = K la (3.28) diventa:
Z ∞
Z ∞
1 Z∞
dq (q − y)eiKy ~ K [F(0, 0, t) + K Fk (0, 0, t)] hq| ρS (t) |qi .
dy
~ dK
2π~ −∞
−∞
−∞
(3.29)
Utilizzando le proprietà (3.25) e (3.26) in (3.29) si ottiene:
hq̂iS F(0, 0, t) + i~ Fk (0, 0, t)
dove hq̂iS =
R∞
−∞
Z ∞
−∞
dy
Z ∞
dq (q − y)
−∞
∂
δ(y) hq| ρS (t) |qi ,
∂y
(3.30)
dq q hq| ρS (t) |qi = tr[q̂ρS (t)].
Integrando per parti la (3.30) sulla variabile y e usando la proprietà (3.27) si ottiene:
hq̂iS F(0, 0, t) + i~ Fk (0, 0, t)
Z ∞
−∞
dq
Z ∞
−∞
dy δ(y) hq| ρS (t) |qi =
= hq̂iS F(0, 0, t) + i~ tr[ρS (t)] Fk (0, 0, t) = hq̂iS ,
(3.31)
dove nell’ultimo passaggio si è fatto uso delle (3.24). È facile verificare che poiché la
variabile y all’interno della (3.30) è di primo grado qualsiasi sviluppo ulteriore al primo
ordine della funzione F (k, 0, t) sarebbe stato nullo una volta effettuata l’integrazione per
parti.
In maniera analoga per il valore medio dell’impulso si trova:
hp̂i = tr[p̂ρ(t)]hp̂iS F(0, 0, t) + i~ tr[ρS (t)] Fq (0, 0, t) = hp̂iS .
(3.32)
Il valore medio quadratico della posizione è:
hq̂ 2 i = hq̂ 2 iS F(0, 0, t) + 2i~ hq̂iS Fk (0, 0, t) − ~2 tr[ρS (t)] Fkk (0, 0, t) =
αλ~2 3
2
= hq̂ iS +
t.
(3.33)
6m2
30
In questo caso lo sviluppo della funzione F (k, 0, t) è stato protratto fino al secondo ordine
in quanto dovendo calcolare un valore quadratico la variabile y sarà di secondo grado, gli
ordini superiori avranno sempre valore nullo quando si effettua l’integrazione per parti.
Analogamente il valore quadratico medio dell’impulso è:
hp̂2 i = hp̂2 iS F(0, 0, t) − 2i~ hqiS Fq (0, 0, t) − ~2 tr[ρS (t)] Fqq (0, 0, t) =
αλ~2
t.
(3.34)
= hp̂2 iS +
2
Riassumendo per una particella libera l’equazione GRW (3.21) conduce ai seguenti valori
medi:
αλ~2 3
hq̂i = hq̂iS ,
hp̂i = hp̂iS ,
{q̂} ≡ hq̂ 2 i − hq̂i2 = {q̂}S +
t,
6m2
αλ~2
t.
(3.35)
{p̂} ≡ hp̂2 i − hp̂i2 = {p̂}S +
2
Le equazioni (3.35) mostrano che negli scarti quadratici medi appare l’effetto dell’evoluzione non Hamiltoniana, e che questa comporta in particolare ad una non conservazione
dell’energia:
αλ~2
t,
(3.36)
hEi = hEiS +
4m
dove hEiS è l’energia conservata per una particella libera associato all’evoluzione pura di
Schrödinger. Nelle sezioni 3.3.4 e 4.2 si approfondirà la rilevanza di questa conclusione.
3.3.3
Analisi dei macrosistemi
Dopo aver visto gli effetti che l’equazione GRW (3.21) comporta nel mondo microscopico, soffermiamo la nostra attenzione alle modifiche apportate da essa a livello macroscopico.
In questo paragrafo quindi si tenta di risolvere il problema legato alla misura in meccanica
quantistica, e in particolare alla questione della macro-oggettivazione, cioè il problema
di identificare il preciso luogo e momento in cui un sistema quantistico caratterizzato
da una sovrapposizione di stati fornisce risultati univoci (senza “interferenze”) a livello
macroscopico quando lo si osserva tramite un appropriato strumento di misura.
Consideriamo la dinamica nel modello GRW del moto di un sistema macroscopico
composto da N particelle. In tal caso la (3.13) diventa:
N
X
d
i
ρ = − [Ĥ, ρ] −
λk (ρ − Tk [ρ]).
dt
~
k=1
(3.37)
Introducendo gli operatori del moto del centro di massa Q̂ e del moto relativo r̂j (j =
1, 2, . . . , N − 1)
q̂k = Q̂ +
N
−1
X
j=1
31
ckj r̂j ,
e considerando che l’Hamiltoniana si scompone nella forma Ĥ = ĤQ + Ĥr , la (3.37)
diventa:
N
X
d
i
i
ρ = − [ĤQ , ρ] − [Ĥr , ρ] −
λk (ρ − Tk [ρ]),
(3.38)
dt
~
~
k=1
dove l’operatore densità ρ ha la forma ρ = ρQ ⊗ ρr = ρQ ρr mentre l’operatore Tk [ρ] si
ottiene dalla (3.14) come:
Tk [ρ] =
1 Z +∞
α 2
π
α
PN −1
dx e− 2 (Q̂+
j=1
ckj r̂j −x)2
α
ρ e− 2 (Q̂+
PN −1
j=1
ckj r̂j −x)2
(3.39)
.
−∞
Calcolandone la traccia sulle coordinate dei moti relativi r si ottiene:
trr (Tk [ρ]) =
Z
dr1 , . . . , drN −1
1 Z +∞
α 2
π
α
dx e− 2 (Q̂+
PN −1
j=1
ckj rj −x)2
−∞
α
PN −1
hρir e− 2 (Q̂+
j=1
ckj rj −x)2
(3.40)
dove hρir = hr1 , . . . , rN −1 | ρ |r1 , . . . , rN −1 i.
A questo punto includendo nella variabile x la quantità
di variabile si ottiene:
trr (Tk [ρ]) = TQ [trr (ρ)]
PN −1
j=1
ckj rj mediante un cambio
(3.41)
dove TQ [Â] è l’operatore:
TQ [Â] =
1 Z +∞
a 2
π
α
2
α
2
dx e− 2 (Q−x) [Â] e− 2 (Q−x) .
(3.42)
−∞
Nella rappresentazione delle coordinate si ha poi:
α
0
00 )2
hQ0 | T [ρ] |Q00 i = e− 4 (Q −Q
hQ0 | [trr (ρ)] |Q00 i .
(3.43)
Ricordando che in base alle (3.2) vale la relazione:
ρQ = trr (ρ)
(3.44)
e calcolando la traccia su r dell’equazione (3.38) utilizzando la (3.41) si ottiene:
N
X
d
i
ρQ = − [ĤQ , ρQ ] −
λk (ρQ − TQ [ρQ ]).
dt
~
k=1
(3.45)
L’equazione (3.45) mostra che l’operatore densità relativo al centro di massa di un sistema
macroscopico soddisfa un’equazione della stessa forma della (3.13) valida per un sistema
microscopico dove il parametro λ è sostituito dalla somma dei λk appartenenti ai singoli
costituenti del macrosistema.
Il centro di massa di un sistema macroscopico, dunque, si comporterà a tutti gli effetti come
32
se subisse dei processi stocastici di localizzazione con frequenza λmacro = N
k=1 λk ' N ,
dove N è dell’ordine del numero di Avogadro. Questo risultato rappresenta la predizione
principale del lavoro GRW e sulle sue implicazioni torneremo a discutere in seguito.
Per studiare il comportamento dell’operatore del moto relativo ρr consideriamo l’operatore
Tk [ρ] nella rappresentazione delle coordinate. Dalla (3.18) si avrà:
P
α
0
00
hQ0 , r0 | Tk [ρ] |Q00 , r00 i = e− 4 (Q −Q
+
PN −1
j=1
ckj [rj0 −rj00 ] )2
hQ0 , r0 | ρ |Q00 , r00 i .
(3.46)
L’ipotesi di GRW è che gli elementi di matrice di hQ0 , r0 | ρ |Q00 , r 00 i siano significativamente
P −1
0
00 √1 ,
diversi da zero solo quando viene soddisfatta la condizione N
j=1 ckj [rj − rj ] α
quindi scegliendo in maniera opportuna il parametro α la (3.46) diventa della forma (3.43)
e quindi vale l’approssimazione:
Tk [ρ] = TQ [ρ].
(3.47)
Il significato fisico della (3.47) è che una localizzazione di un singolo costituente di un
sistema rigido è equivalente alla localizzazione del centro di massa. Riprendendo la (3.38)
e ricordando che l’operatore densità ρ si può scomporre nella forma ρ = ρQ ⊗ ρr = ρQ ρr
si calcola facilemente che l’operatore ρr ubbidirà all’equazione:
i
d
ρr = − [Ĥr , ρ]
dt
~
(3.48)
Mettendo a confronto la (3.48) con la (3.45) si conclude che ρr a differenza di ρQ non è
influenzato dal termine non Hamiltoniano introdotto nella (3.38).
3.3.4
Scelta dei parametri λ e α
Come si è visto la teoria GRW dipende da due parametri costanti: λ e α. La
scelta dei loro valori è fondamentale in quanto, come già anticipato, bisogna unificare la
teoria quantistica con la contraddittoria esperienza macroscopica senza però apportare
cambiamenti apprezzabili al mondo microscopico.
Per semplicità assumiamo che la frequenza di localizzazione λk di tutti i microscopici
costituenti di un corpo macroscopico sia sempre la stessa, λk = λmicro , e che quindi il
centro di massa sia influenzato dallo stesso processo con una frequenza λmacro = N λmicro
dove con N s’intende una costante dell’ordine del numero di Avogadro, N ' 1023 .
Nel lavoro GRW [2] si propongono per i parametri della teoria i seguenti valori:
λmicro ' 10−16 sec−1 ,
(3.49)
1
√ ' 10−5 cm.
α
(3.50)
Questi implicano che in un sistema microscopico, la localizzazione avviene spontaneamente
1
in un intervallo di tempo dell’ordine di τ = λmicro
ossia una volta ogni 108 anni circa.
33
La scelta numerica di √1α rappresenta la distanza oltre la quale si passerà da una
sovrapposizione lineare ad una miscela statistica.
Con questi valori in un sistema microscopico la localizzazione non avviene praticamente
mai mantenendo quindi la validità della meccanica quantistica “standard”.
Per i corpi macroscopici invece la frequenza del centro di massa varrà:
λmacro = N λmicro ' 107 sec−1 ,
(3.51)
ossia ogni secondo circa 107 particelle verranno localizzate. Quindi in un decimilionesimo
di secondo almeno una particella del macrosistema verrà localizzata e come si è visto
nella (3.47) una localizzazione di un singolo costituente di un sistema rigido è equivalente
alla localizzazione del centro di massa. In conclusione, un macrosistema fisico tollererà
una sovrapposizione quantistica solamente per un decimilionesimo di secondo poi subirà
una localizzazione.
Riassumendo ipotizziamo di studiare un sistema macroscopico in un intervallo spaziale
di ampiezza |q 0 − q 00 | = 4 × 10−5 cm in un periodo di tempo τ = 10−7 sec. Dopo un
tempo di ordine τ , secondo la teoria GRW, le sovrapposizioni degli stati separati da una
distanza più grande di |q 0 − q 00 | = 4 × 10−5 cm si trasformeranno in miscele statistiche in
cui avvengono localizzazioni casuali e spontanee.
Riprendendo la (3.36), si può stimare quantitativamente il valore della quantità dell’energia
non conservata
αλ~2
δE =
t.
(3.52)
4m
Nel caso di un corpo microscopico in cui m ' 10−23 g si avrà che:
δE
' 10−25 eV sec−1 ,
t
(3.53)
che corrisponde con l’incremento di 1 eV ogni 1018 anni.
Nel caso macroscopico ovviamente l’incremento della massa e della frequenza è identico
di conseguenza l’energia non conservata rimane della stessa quantità del modello microscopico.
Questo risultato verrà ripreso successivamente riguardo la ricerca di una generalizzazione
relativistica della teoria GRW nella sezione 4.2.
34
Capitolo 4
Critiche alla teoria GRW
La teoria GRW presenta dei limiti che hanno dato luogo alle seguenti critiche:
1. Il modello GRW si configura come puramente fenomenologico, che richiede l’utilizzo
di processi apparentemente arbitrari, inventati al solo scopo di ottenere quello che
si desidera.
2. Il modello GRW contiene due nuove costanti che se la teoria dovesse essere considerata come reale acquisterebbero l’importanza di due costanti naturali, analogamente a
quanto è successo alla luce per la relatività e alla costante di Planck per la meccanica
quantistica. L’introduzione di due nuove ulteriori costanti è stata argomento di
discussione poichè per alcuni studiosi appare eccessiva.
3. Il modello GRW fornisce alla teoria l’irreversibilità (questo può essere visto sia
come un pregio sia come un difetto, a seconda del punto di vista).
4. Nonostante il grande impegno dedicatoci non si è riuscito ad elaborare una generalizzazione relativistica completamente soddisfacente.
4.1
Il modello percettivo con la teoria GRW
Tra i vari giudizi dati alla teoria GRW interessante è quello pubblicato da D.Albert,
Y.Aharonov e L.Vaidman nel [14].
Gli autori considerano un apparato di Stern-Gerlach come quello in figura (4.1) in cui
un atomo di spin 12 attraversa l’apparecchio per il quale il campo magnetico risulta
disomogeneo nella direzione dell’asse z. Uscendo dalla regione del magnete lo stato
dell’atomo sarà la sovrapposizione di stati corrispondenti ad una traiettoria deflessa verso
l’alto e una deflessa verso il basso che colpiranno in due punti differenti uno schermo
fluorescente posto ad una certa distanza. La peculiarità “aggiunta” in [14] è che all’impatto
l’atomo eccita un numero di atomi dello schermo che successivamente emettono un piccolo
35
fascio di fotoni che si propagano verso un osservatore cosciente. Si avranno così fotoni
emessi dalla parte alta dello schermo e circa altrettanti fotoni emessi dalla parte bassa
dello schermo.
Figura 4.1: Raffigurazione dell’esperimento di Stern-Gerlach
Un fatto ben noto è che la soglia della percezione visiva risulta estremamente bassa:
è stato dimostrato che basta che 7 o più fotoni colpiscano la retina di un osservatore
cosciente per produrre una percezione non ambigua. Avvalendosi di questa nozione i tre
autori del [14] fanno le seguenti considerazioni:
1. Prima che l’osservatore guardi lo schermo non v’è alcun dubbio che, secondo la teoria
GRW, si ha effettivamente la sovrapposizione delle due situazioni, fotoni emergenti
dalla parte alta dello schermo e fotoni emergenti dalla parte bassa dello schermo, che
portano a due differenti percezioni. Infatti, poiché il numero dei sistemi coinvolti
(l’atomo originale, gli atomi dello schermo, i fotoni) è estremamente piccolo, è
improbabile che un processo di localizzazione possa avvenire in tempi umanamente
brevi.
2. L’osservatore cosciente non finirà in uno stato mentale confuso; egli percepirà
esattamente solo uno dei due casi sovrapposti.
Queste considerazioni inducono a trarre tale conclusione [14]: la teoria GRW comporta
che nessuna misura è del tutto terminata, nessuna misura deve assolutamente avere un
esito, finché non vi sia un osservatore senziente che acquista coscienza dell’esito.
Ghirardi difende la sua teoria in due modi: il primo dicendo che non è assolutamente
necessaria la presenza alla fine della misura di un osservatore cosciente (in quanto
sostituendo egli con un apparecchio di indice macroscopico la riduzione avverrebbe come
prestabilito dalla teoria) e il secondo approfondendo lo studio biofisico sulla trasmissione
nervosa durante la percezione. Il processo di percezione implica i seguenti passi: Ogni
neurone possiede un prolungamento, detto assone, lungo il quale viaggiano, in uscita dal
36
neurone stesso, gli impulsi elettrici diretto ad altre cellule nervose o muscolari. Affinché
la conduzione di tali impulsi sia la più rapida possibile (circa 100 m/s) l’assone possiede
un rivestimento isolante (la guaina mielinica, composta da una sostanza detta mielina)
che limita il tempo impiegato per il passaggio di ioni positivi attraverso la membrana
cellulare, dal quale dipende lo spostamento dell’impulso stesso. L’impulso impiegherebbe
un tempo maggiore ad attraversare l’assone se non ci fosse la guaina mielinica. La guaina
mielinica presenta delle interruzioni (più precisamente delle zone di spessore minimo),
dette nodi di Ranvier.
Figura 4.2: Raffigurazione della trasmissione nervosa lungo un assone, la freccia indica la
direzione dell’impulso. Gli ioni N a+ e K + escono ed entrano dai nodi di Ranvier
portando alla trasmissione del segnale elettrico lungo l’assone stesso
Lo scopo di questi nodi è precisamente quello di lasciare filtrare N a+ e K + dalla zona
interna a quella esterna dell’assone portando a una polarizzazione e depolarizzazione
dei suoi segmenti che determinano la propagazione del segnale elettrico che induce la
percezione.
Interessante è notare che lo spessore della guaina è dell’ordine di 10−5 cm (proprio
l’ordine di grandezza della distanza caratteristica di localizzazione secondo il modello
GRW) mentre il tempo caratteristico della percezione cosciente è dell’ordine di 10−2 s.
Con questi parametri seguendo il ragionamento fatto nella sezione 3.3.4 del modello GRW
37
si arriva alla soppressione di uno dei due termini di sovrapposizione.
In conclusione, se ci si concentra sui fenomeni che avvengono nel cervello affinché si abbia
una percezione definita, il modello GRW assicura che la potenziale sovrapposizione di
segnali fisici che in un tempo t creerebbero percezioni definite e distinte viene soppressa
dinamicamente in un tempo inferiore a t.
4.2
L’assenza di una generalizzazione relativistica
Il problema più rilevante del modello GRW è l’incompatibilità con le teorie relativistiche. Questo problema non è in verità limitato solamente alla teoria GRW ma è esteso ad
altre modifiche della meccanica quantistica, come ad esempio la teoria dell’onda pilota di
Bohm.
A livello relativistico le interpretazioni come ad esempio la teoria dei multiversi di Everett,
la teoria della foliazione delle menti o la teoria che necessita del “potere” della presa di
coscienza da parte dell’osservatore non comportano conflitti tra processi del continuum
spaziotemporale.
Riguardo alla teoria dell’onda pilota, Bohm insieme ad Hiley ha mostrato [15] [16] un
modello della sua teoria del tutto equivalente alla teoria relativistica del campo mesonico
libero, dando alle osservabili del campo il ruolo dato nella teoria originale alle posizioni. L’elaborazione di tale modello è stata fatta ponendosi in un sistema di riferimento
facendolo diventare “privilegiato” e formulando così una teoria che descriva gli effetti
voluti. Il problema scaturisce perché la teoria [7] mostra che le traiettorie delle particelle
di Bohm non sono Lorentz-invarianti, infatti diversi osservatori inerziali possono associare
alla medesima particella traiettorie completamente diverse. Bell [11] commenta così il
problema relativistico dell’onda pilota:
Questa è una posizione incredibile [...] io penso che essa sia logicamente consistente,
ma dopo che uno ha colto il significato dell’ipotesi di invarianza di Lorentz nella
fisica moderna, io penso che uno non possa più accettare questa posizione [...]
Questo per me è un grande difetto. Tuttavia, ciò su cui si deve insistere è che la
teoria è in perfetto accordo coi dati sperimentali.
Il modello GRW a differenza della teoria dell’onda pilota non ha il problema di assumere
un sistema di riferimento privilegiato per essere formulato e quindi sembra consentire una
generalizzazione relativistica; di rilievo sono gli articoli pubblicati da parte di Tumulka
[17] e, indipendentemente, da Ghirardi stesso [18] sulle quali si sta svolgendo un vivace
dibattito a livello internazionale.
Una difficoltà s’incontra considerando che il modello GRW incorpora, come si è visto
nell’equazione (3.36), la non conservazione dell’energia: i termini non lineari sembrano
indurre ad un aumento infinito di energia e questo ovviamente si rivela inaccettabile in
quanto, nell’esperienza comune, l’energia sembra essere una quantità conservata. Tuttavia
38
dalla scelta dei parametri di cui si è discusso nella sezione 3.3.4 si mostra che la quantità
dell’energia non conservata, calcolata nell’equazione (3.53), è talmente piccola rispetto al
tempo umano che si può ritenere accettabile un suo incremento (in quanto impossibile per
gli umani da percepire); questo conferma la fattibilità di una generalizzazione relativistica
per il modello GRW: al giorno d’oggi però non si è ancora riusciti a formularne una che
soddisfi completamente le condizioni richieste.
39
Appendice A
Lo spazio di Hilbert e il prodotto
tensoriale
A.1
Definizione dello spazio di Hilbert
Definizione tratta da [19] e [20]
Uno spazio di Hilbert H=(H, h·, ·i) è uno spazio vettoriale H reale o complesso sul
quale è definito un prodotto interno h·, ·i tale che, detta d la distanza indotta da h·, ·i
su H, lo spazio metrico (H, d)sia completo(in cui tutte le successioni di Cauchy sono
convergenti ad un elemento dello spazio. Si tratta di un importante caso particolare di
spazio uniforme completo). Uno spazio di Hilbert è dunque uno spazio prehilbertiano, in
cui il prodotto interno definisce una norma, attraverso la quale si definisce una distanza
che è tale da rendere lo spazio completo.Esplicitamente, detto V uno spazio vettoriale
sul campo reale o complesso e h·, ·i un prodotto scalare (nel caso complesso, una forma
hermitiana) definito positivo su V, allora è naturalmente definita una norma k · k sullo
stesso spazio ponendo:
kvk :=
q
hv, vi
per ogni vettore v ∈ V Si può associare a uno spazio normato (V, k · k) una naturale
struttura metrica, ottenuta definendo la distanza d come:
d(u, v) := ku − vk per ogni u, v ∈ V Secondo la usuale identificazione di uno spazio
vettoriale con uno spazio affine costruito prendendo come punti i vettori stessi, si pone
come distanza tra due vettori la norma della loro differenza. Nel caso in cui la norma
derivi da un prodotto
scalare, vale dunque la seguente uguaglianza:
q
d(u, v) = hu − v, u − vi La presenza di un prodotto scalare fornisce il modo di
definire in generale alcune nozioni proprie dell’ambito degli spazi di Hilbert. Dati due
vettori u, v ∈ H, si può definire l’angolo θ da essi formato mediante la relazione:
40
cos θ =
hu, vi
kuk kvk
Coerentemente con la precedente definizione, dato un insieme qualsiasi K ⊂ H, si definisce
il complemento ortogonale di K come il sottospazio:
K ⊥ = {v ∈ H |hu, vi = 0 ∀u ∈ K} In particolare, due vettori u e v si dicono ortogonali
se hu, vi = 0, ossia se l’uno è nel complemento ortogonale dell’altro. Inoltre, una famiglia
di vettori si dice ortonormale se i vettori che la compongono sono a due a due ortogonali
e hanno norma 1.
Dati due vettori v, e ∈ H, si definisce la componente di v lungo e lo scalare hv, ei, e la
proiezione di v su e il vettore
hv, ei
e
he, ei
.
A.2
Il prodotto tensoriale
Considerati due spazi di Hilbert H1 e H2 di rispettive dimensioni D1 e D2 1 è lecito
dire che lo spazio di Hilbert H è il prodotto tensoriale di H1 e H2 definito H = H1 ⊗ H2
qualora si possa associare ad ogni coppia di ket |αi ∈ H1 e |βi ∈ H2 un terzo vettore
appartenente ad H, denotato con |αi ⊗ |βi 2 e chiamato prodotto tensoriale di |αi e |βi.
Per definizione, i vettori di H sono combinazioni lineari dei precedenti ket |αi ⊗ |βi e
sono soddisfatte le seguenti proprietà:
1. ∀ |αi ∈ H1
∀ |βi ∈ H2
c∈C
c(|αi ⊗ |βi) = c |αi ⊗ |βi = |αi ⊗ c |βi
2. ∀ |α1 i,|α2 i ∈ H1
(A.1)
∀ |βi ∈ H2
(|α1 i + |α2 i) ⊗ |βi = |α1 i ⊗ |βi + |α2 i ⊗ |βi
1
(A.2)
La dimensione n di uno spazio di Hilbert H è data dal numero massimo di vettori linearmente indipendenti.Un insieme di ket linearmente indipendenti {|α1 i , |α2 i , ..., |αn i} in uno spazio H n-dimensionale
costituisce una base di tale spazio.Se H = H1 ⊗ H2 allora la sua dimensione sarà il prodotto di D1 · D2
2
Equivalentemente si può scrivere come |α, βi o |αβi
41
3. ∀ |αi ∈ H1
∀ |β1 i , |β2 i ∈ H2
|αi ⊗ (|β1 i + |β2 i) = |αi ⊗ |β1 i + |αi ⊗ |β2 i
(A.3)
Siano |ii e |ji le basi ortonormail di H1 e H2 , allora la base ortonormale di H = H1 ⊗H2
è data da |ii ⊗ |ji. Ad esempio, se H1 e H2 sono due spazi di Hilbert bidimensionali
(D1 = D2 = 2) con ket di base |0i e |1i, allora H ha dimensione n = D1 · D2 = 4 e ket di
base (|0i ⊗ |0i,|0i ⊗ |1i,|1i ⊗ |0i e |1i ⊗ |1i). Perciò un generico vettore |Ψi ∈ H si può
espandere su questa base come segue:
|Ψi = c1 |00i + c2 |10i + c3 |01i + c4 |11i
42
Appendice B
Soluzione per l’equazione GRW
(3.22) per la particella libera
Per risolvere la (3.21) si ponga:
h
α
0 2
i
ρ(q, q 0 , t) ≡ hq| ρ(t) |qi = e−λt exp λte− 4 (q−q ) ρ̃(q, q 0 , t)
(B.1)
così da ottenere (derivando sul tempo)
α
∂ ρ̃(q, q 0 , t)
i~ ∂ 2 ρ̃(q, q 0 , t) ∂ 2 ρ̃(q, q 0 , t)
0 2
− αλt(q − q 0 )e− 4 (q−q )
=
−
2
2
0
∂t
2m
∂q
∂q
"
∂ ρ̃(q, q 0 , t) ∂ ρ̃(q, q 0 , t)
+
∂q
∂q 0
(B.2)
Effettuando il cambio di variabili:
e chiamando
x = q − q0,
(B.3a)
y = q + q0,
(B.3b)
x+y y−x
,
,t ,
ρ̂(x, y, t) = ρ̃
2
2
otteniamo con facili passaggi algebrici
"
#
α 2 ∂ ρ̂(x, y, t)
∂ ρ̂(x, y, t)
i~ ∂ 2 ρ̂(x, y, t)
=
2
− αλtx e− 4 x
.
∂t
m
∂x∂y
∂y
(B.4)
L’equazione (B.4) può essere risolta per separazione di variabili ponendo
ρ̂(x, y, t) = f (x, t)g(y).
43
(B.5)
!#
.
Ponendo la funzione g(y) nella forma:
dg(y)
+ iµg(y) = 0,
dy
da cui
µ=
(B.6)
i dg(y)
,
g(y) dy
(B.7)
l’equazione (B.5) diventa:
"
#
α 2 dg(y)
i~ ∂f (x, t) dg(y)
∂f (x, t)
g(y) =
2
− αλtxe− 4 x
f (x, t) ,
∂t
m
∂x
dy
dy
raccogliendo ed usando la (B.7)
(B.8)
#
"
α 2
∂f (x, t)
µ~ ∂f (x, t)
=
2
− αλtxe− 4 x f (x, t) ,
∂t
m
∂x
(B.9)
con µ costante arbitraria d’integrazione.
La soluzione della (B.6) è banale:
g(y) = e−iµy .
(B.10)
La soluzione della (B.9) è più complessa e si ottiene con il cambio di variabili:
z=−
µ~
1
t + x,
m
2
(B.11a)
w=
µ~
1
t + x,
m
2
(B.11b)
da cui
!
f (x, t) = V
µ~
1
t+ x ×
m
2
αλµ Z x/2−(µ~/m)t
× exp
4µ~
0
µ~
1
dz 0
t+ x
m
2
!2
−z
02
α
exp −
4
µ~
1
t + x + z0
m
2
!2
.
(B.12)
Usando le equazioni (B.12), (B.10), (B.5) e (B.3) si ottiene finalmente
!
µ~
1
0
t + (q − q 0 ) e−iµ(q+q ) ×
m
2
0
ρ̃(q, q , t) = V
× exp
αλm Z (q−q0 )/2−(µ~/m)t
4µ~
0
!2
µ~
1
dz 0
t + (q − q 0 )
m
2
α
2
− z 0 exp −
4
µ~
1
t + (q − q 0 ) + z 0
m
2
!2
.
(B.13)
44
La (B.13) è una soluzione dell’equazione (B.2) per ogni scelta opportuna della funzione V.
In maniera più compatta, servendoci delle (B.11) e delle (B.3), la (B.13) si può riscrivere
come:
α
αλm Z z 0 2
2 2
2
ρ̃(w, z, y) = V(w)e−iµy exp
dz (w − z 0 )e− 4 (w+z ) .
(B.14)
4µ~ 0
Effettuando il cambio di variabile y 0 = w + z 0 si avrà per la parte integrale della (B.14):
Z z
0
2
02
−α
(w+z 2 )2
4
dz (w − z )e
→
Z w+z
Z w+z
α
dy 0 [w2 − (w − y)2 ]e− 4 (w+z
2 )2
−
Z w
=
α
dy 0 [w2 − (w − y)2 ]e− 4 (w+z
2 )2
.(B.15)
0
0
n
2 )2
w
0
=
α
dy 0 [w2 − (w − y)2 ]e− 4 (w+z
α
2 2
o
La quantità − 0w dy 0 [w2 − (w − y)2 ]e− 4 (w+z ) , essendo funzione solo di w, la riassorbo
nella V(w) cosicché della (B.15) rimane la quantità:
R
Z w+z
α
dy 0 [w2 − (w − y)2 ]e− 4 (w+z
2 )2
=
0
Z w+z
=
α
2
dy 0 [−y 0 + 2wy 0 ]e− 4 (w+z
2 )2
=
0
Z w+z
=
α
2
dy 0 (−y 0 )e− 4 (w+z
2 )2
+ 2w
=
α
dy 0 y 0 e− 4 (w+z
2 )2
=
0
0
Z w+z
Z w+z
α
2
dy 0 (−y 0 )e− 4 (w+z
2 )2
+
0
α
4w
2 2
(1 − e− 4 (w+z ) ).
α
(B.16)
Inserendo la (B.16) nella (B.14), passando alle variabili q, q 0 , usando la (B.1) per passare
dalla ρ̃(q, q 0 , t) alla ρ(q, q 0 , t) ed infine integrando su tutti i µ si ha che:
Z ∞
!
#
"
α
2µ~
λm
0 2
0
ρ(q, q , t) =
dµ V µ, q − q +
×
t e−iµ(q+q ) exp
(q − q 0 ) 1 − e− 4 (q−q )
m
2µ~
−∞
!
α 2
λmα Z q−q0
× exp −
dy y 2 e− 4 y .
(B.17)
4µ~ 0
0
0
Si consideri ora la seguente semplificazione:
Z x
λmα Z x
λmα
2 Zx
d − α y2
λm
2 −α
y2
−α
y2
−α
y2
4
4
4
4
−
dy y e
=−
−
dy y e
=
xe
−
dy ye
,
4µ~ 0
4µ~
α 0
dy
µ~
0
(B.18)
dove si è usata la relazione (B.3) e nell’ultimo passaggio si è effettuata l’integrazione per
parti. Tramite la relazione (B.18) la (B.17) può essere semplificata con:
Z ∞
!
"
#
α 2
2µ~
λm
αZ x
−iµy
ρ(x, y, t) =
dµ V µ, x +
t e
exp
x−
dy y 2 e− 4 y .
m
2µ~
2 0
−∞
45
(B.19)
Ora se si considerino tali sostituzioni:
λm
δµ =
,
2µ~
"
#
α 2
λm
αZ x
Eλ (µ, x) = exp
x−
dy y 2 e− 4 y ,
2µ~
2 0
(B.20)
la (B.19) si può scrivere in maniera più compatta:
ρ(x, y, t) =
Z ∞
−∞
dµ V (µ, x + δµ t) e−iµy Eλ (µ, x) .
(B.21)
Saranno utili, per arrivare alla soluzione finale, le seguenti relazioni; ricordando che il
pedice S sarà messo per indicare il valore associato all’evoluzione pura di Schrödinger,
ovvero quando si pone λ = 0, (Eλ = 1) in questo caso la (B.21) sarà:
Z ∞
dµ VS (µ, x + δµ t) e−iµy ;
(B.22)
dµ V (µ, x) e−iµy Eλ (µ, x) = ρS (x, y, 0),
(B.23)
ρS (x, y, t) =
−∞
al tempo t = 0 la (B.21) sarà invece
ρ(x, y, 0) =
Z ∞
−∞
l’uguaglianza finale è data dal fatto che al tempo iniziale la “partenza” dell’evoluzione di
ρ(x, y, 0) e di ρS (x, y, 0) è la stessa.
Dalle (B.22) e (B.23) è facile dimostrare che:
VS (µ, x) = V (µ, x) Eλ (µ, x) ,
(B.24)
VS (µ, x + δµ t) = V (µ, x + δµ t) Eλ (µ, x + δµ t) ,
(B.25)
da cui si deduce che:
Tornando all’equazione (B.22) applicando l’antitrasformata di Fourier otteniamo:
VS (µ, x + δµ t) =
1 Z +∞ 0
0
dy ρS (x, y 0 , t)eiµy ,
2π −∞
(B.26)
che unita alla relazione (B.25) fornisce:
1 Z +∞ 0 ρS (x, y 0 , t) iµy0
V (µ, x + δµ t) =
dy
e .
2π −∞
Eλ (µ, x, δµ t)
(B.27)
Inserendo nella (B.21) la (B.27) si otterrà:
Z +∞
Eλ (µ, x)
1 Z∞
0
ρ(x, y, t) =
dµ
dy 0 ρS (x, y 0 , t)eiµ(y −y)
=
2π −∞
Eλ (µ, x + δµ t)
−∞
Z +∞
1 Z∞
Eλ (µ, x)
0
=
dµ
dy 0 ρS (x, y 0 + y, t)eiµy
.
2π −∞
Eλ (µ, x + δµ t)
−∞
46
(B.28)
Prima di proseguire soffermiamo la nostra attenzione sulla quantità
Eλ (µ, x)
= F(µ, x, t),
Eλ (µ, x + δµ t)
(B.29)
esplicitandola otteniamo:
(
"
Z x+δµ t
α 2
Eλ (µ, x)
λm
= exp
x − (x − δµ t) +
dy e− 4 y
Eλ (µ, x + δµ t)
2µ~
x
"
= exp λt + λ
Z δµ t
dz e
−α
(x+z)2
4
#
= exp λt + λ
0
Z t
#)
−α
(x+ 2µ~
t)2
4
m
dt e
=
,
(B.30)
0
applicando le sostituzioni 2µ~ = k e q = x si ottiene il fattore di smorzamento F(k, q, t)
di cui si è ampiamente discusso nella sezione 3.3.2:
exp λt + λ
Z t
−α
(q+ kt
t)2
4
m
dt e
= F(k, q, t).
(B.31)
0
Tornando alla (B.28) con semplici sostituzioni algebriche si ottiene:
Z +∞
y0
y0
1 Z∞
0
dy 0 ρS (q + , q 0 + , t)eiµy F(k, q − q 0 , t).
dµ
2π −∞
2
2
−∞
Infine ponendo y =
y0
2
eµ=
k
2~
(B.32)
avrò che
dµdy 0 =
dk
1
2dy = dkdy,
2~
~
inserite nella (B.32) mi daranno proprio l’equazione (3.22):
Z ∞
iky
1 Z∞
dk
dy e ~ F(k, q 0 − q 00 , t)ρS (q + y, q 0 + y, t)
ρ(q, q , t) =
2π~ −∞
−∞
0
47
(B.33)
Bibliografia
[1] G.C.Ghirardi. Un’occhiata alle carte di Dio. IlSaggiatore, 2012.
[2] T.Weber G. C. Ghirardi, A. Rimini. Unified dynamics for micorscopic and
macroscopic systems. Physical Review, 34(2):470–491, 1986.
[3] E. Schrödinger.
Die gegenwärtinge situation in der quantenmechanik.
Naturwissenschaften 23, pages 807–812 ; 823–828 ; 844–849, 1935.
[4] J. Von Neumann. Mathematical Foundations of Quantum Mechanics. Princeton
University Press, 1932.
[5] E. Schrödinger. Die gegenwärtige situation in der quantenmechanik [la situazione
attuale della meccanica quantistica]. Die Naturwissenschaften 23, pages 807–812,
823–828, 844–849; citazione a pag. 812, 1935.
[6] S.Haroche. Entanglement, decoherence and the quantum/classical boundary. Physics
Today, 1998.
[7] D.Bohm. A suggested interpretation of the quantum theory in terms of ”hidden”
variables. Physics Review, 85:166–193, 1952.
[8] S. Kochen and E.P. Specker. The problem of hidden variables in quantum mechanics.
Journal of Mathematics and Mechanics, (17):58–87, 1967.
[9] Hugh Everett III. “relative state” formulation of quantum mechanics. Reviews of
Modern Physics, 29:454–462, 1957.
[10] David Z.Albert. Quantum Mechanics and Experience. Harvard University Press,
1994.
[11] J.S.Bell. Dicibile e indicibile in meccanica quantistica. Adelphi, 2010.
[12] J.Sakurai. Meccanica quantistica moderna. Zanichelli, 1990.
[13] D’Emilio Picasso. Problemi di Meccanica Quantistica. ETS, 2011.
48
[14] David Z. Albert Yakir Aharonov and Lev Vaidman. How the result of a measurement
of a component of the spin of a spin-1/2 particle can turn out to be 100. Phys. Rev.,
60, 1988.
[15] B.Hiley D.Bohm. The Undivided Universe: An Ontological Interpretation of Quantum
Theory. Routledge, 1993.
[16] D. Bohm e B.J. Hiley. Non-locality and locality in the stochastic interpretation of
quantum mechanics,. Phys. Rep., 172:93–122, 1989.
[17] Roderich Tumulka. A relativistic version of the ghirardi–rimini–weber model. Journal
of Statistical Physics, 125:825–844, August 16, 2006.
[18] Grassi R. Pearle P. Ghirardi, G.C. Relativistic dynamical reduction models: general
framework and examples. Found. Phys., 20:1271–1316, 1990.
[19] Avner Friedman. Foundations of Modern Analysis. Courier Dover Publications, 1982.
[20] Mladinska Knjiga Walter Rudin. Real and Complex Analysis. McGraw-Hill, 1970.
49