CTRD
CTRD
Manuale utente
Versione 2.5
MACTRD0010I0
SOMMARIO
SOMMARIO ....................................................................................................................................................... 2
1.1
AVVERTENZE ....................................................................................................................................... 4
2.
CARATTERISTICHE ................................................................................................................................... 5
2.1
2.2
2.3
2.4
3.
Generalità ................................................................................................................................................. 5
Ingressi - uscite ........................................................................................................................................ 5
Protezioni ................................................................................................................................................. 5
TAGLIE E DIMENSIONI CONVERTITORI ....................................................................................................... 6
POTENZA: COLLEGAMENTO E DIMENSIONAMENTO FUSIBILI ................................................. 7
3.1
3.2
3.3
3.4
3.5
3.6
Taglie fusibili CTRD (FL-FM1) .............................................................................................................. 7
Topografico generale ............................................................................................................................... 8
Contattore sempre inserito e arresto con minima velocità ...................................................................... 11
Contattore chiude-apre e arresto con minima velocità ........................................................................... 11
Significato dei segnali logici (connettore CN1): .................................................................................... 12
Significato dei segnali analogici (connettore CN1): ............................................................................... 13
4.
DESCRIZIONE DATI FONDAMENTALI ............................................................................................... 14
5.
PROCEDURA DI MESSA IN SERVIZIO ................................................................................................ 14
5.1
Malfunzionamenti con segnalazione d’allarme: diagnosi ....................................................................... 16
6.
ACCORGIMENTI ANTIDISTURBO ....................................................................................................... 17
7.
DESCRIZIONE DEI SEGNALI SUI CONNETTORI.............................................................................. 18
7.1
7.2
7.3
7.4
7.5
7.6
8.
DIAGNOSTICA ........................................................................................................................................... 26
8.1
8.2
9.
Comunicazione con PC o terminale operatore (connettore JP3) ............................................................ 18
Cavo di collegamento tra connettore JP3 e RS232 di un PC.................................................................. 18
Cavo di collegamento tra connettore JP3 e terminale operatore ............................................................ 18
ConnettoreJP4 ........................................................................................................................................ 19
Segnali sulle morsettiere ........................................................................................................................ 19
Collegamenti dei segnali esterni al connettore CN1 ............................................................................... 21
Visualizzazioni ....................................................................................................................................... 26
Allarmi ed esclusioni .............................................................................................................................. 26
DATI DISPONIBILI DA TASTIERINO ................................................................................................... 26
9.1
Descrizione funzionamento tastierino .................................................................................................... 26
9.2
Situazione a riposo ................................................................................................................................. 26
9.3
Impostazione e lettura dei parametri e connessioni ................................................................................ 26
9.4
Visualizzazione delle grandezze interne ................................................................................................ 27
9.5
SALVATAGGIO E RIPRISTINO ALLARMI ..................................................................................................... 27
N.B. I PARAMETRI CHE RAGGIUNGONO I VALORI SUPERIORI AL 19999 (ES: P20 IL FONDOSCALA
È 25000) VENGONO VISUALIZZATI CON IL SEGMENTO A FIANCO DEL SEGNO + ED IL SEGMENTO
DEL SEGNO - CHE SONO I SEGMENTI PRESENTI DELLA CIFRA 2. .............................................................. 27
POICHÉ I PARAMETRI DI DEFAULT SONO PARAMETRI STANDARD SICURAMENTE DIVERSI DA
QUELLI PERSONALIZZATI È OPPORTUNO CHE PER OGNI AZIONAMENTO DOPO L'INSTALLAZIONE
VENGA FATTA UNA COPIA ACCURATA DEI PARAMETRI DELLA MEMORIA PERMANENTE IN MODO
DA ESSERE IN GRADO DI RIPRODURLI SU UN EVENTUALE AZIONAMENTO DI RICAMBIO, OD IN
CASO DI RIPRISTINO DELLA MEMORIA CON I PARAMETRI DI DEFAULT. .............................................. 27
9.6
DIAGRAMMA FUNZIONAMENTO TASTIERINO............................................................................................ 28
9.7
Parametri ................................................................................................................................................ 29
9.8
Parametri per la visualizzazione assoluta ............................................................................................... 30
9.9
Parametri riservati .................................................................................................................................. 30
9.10 Collegamenti interni (IN GRASSETTO CONFIGURAZIONE DI DEFAULT)...................................................... 31
RANGE ............................................................................................................................................................... 31
9.11 Visualizzazioni ....................................................................................................................................... 33
9.12 Allarmi ................................................................................................................................................... 34
REV.2.5 07/11/13
9.13
9.14
10.
10.1
10.2
10.3
10.4
10.5
11.
11.1
11.2
11.3
11.4
12.
Ingressi ................................................................................................................................................... 34
Uscite ..................................................................................................................................................... 34
TARATURE E IMPOSTAZIONI........................................................................................................... 35
Adattamento col motore ......................................................................................................................... 35
Impostazioni dei riferimenti e dei limiti di velocità ............................................................................... 35
impostazioni livello uscita minima velocità ........................................................................................... 35
Impostazioni valori di limite e di picco ................................................................................................. 36
Comando autotaratura anello di corrente ............................................................................................... 36
SCHEMA A BLOCCHI DELLA REGOLAZIONE ............................................................................. 37
Riferimenti di velocità e rampa .............................................................................................................. 42
Limitazione di velocità e stadio rampa con arrotondamenti ................................................................... 42
Regolatore di velocità e limiti di corrente .............................................................................................. 42
Protezione termica motore ..................................................................................................................... 43
TERMINALE OPERATORE ................................................................................................................. 44
12.1 Descrizione dei tasti e loro funzionalità: ................................................................................................ 45
12.2 Menù principali: ..................................................................................................................................... 45
12.2.1 Visualizzazioni: .............................................................................................................................. 45
12.2.2 Impostazioni:.................................................................................................................................. 45
12.2.3 Simulazioni: ................................................................................................................................... 46
12.2.4 Autotarature:.................................................................................................................................. 46
12.2.5 Memorizzazioni: ............................................................................................................................. 46
12.3 Modifica di un valore: ............................................................................................................................ 46
12.3.1 Sigle di identificazione: .................................................................................................................. 46
12.3.2 Come modificare un parametro: .................................................................................................... 47
12.4 Segnalazione allarmi: ............................................................................................................................. 47
12.5 Settaggio della lingua di comunicazione: ............................................................................................... 47
12.6 Settaggio Baud rate ................................................................................................................................ 48
12.7 PARAMETRI:............................................................................................................................................ 48
13.
13.1
13.2
14.
RETROAZIONE DA ENCODER .......................................................................................................... 49
Descrizione collegamenti e tarature ....................................................................................................... 49
Disposizione dei punti d’interesse .......................................................................................................... 50
SCHEDA REGOLATORE DI CAMPO ES 95003 ............................................................................... 51
14.1 Descrizione: ........................................................................................................................................... 51
14.2 Configurazione del convertitore: ............................................................................................................ 51
14.3 Collegamento scheda eccitatrice con convertitore ctrd: ......................................................................... 51
14.4 Disposizione morsettiere: ....................................................................................................................... 52
14.5 Significato jumpers e led: ....................................................................................................................... 53
14.6 Schema a blocchi della regolazione ....................................................................................................... 54
14.7 TARATURA DELLA SCHEDA: .................................................................................................................... 55
14.7.1 Parametri di taratura ..................................................................................................................... 56
14.8 Modifica del numero di spire sul trasduttore amperometrico: ................................................................ 57
14.9 Procedura di sostituzione della ES 95003: ............................................................................................. 58
15.
15.1
15.2
15.3
15.4
15.5
15.6
INTERFACCIA PROFIBUS CS948 ...................................................................................................... 58
Descrizione Hardware ............................................................................................................................ 59
Impostazione del numero di nodo .......................................................................................................... 59
Descrizione Messaggio Profibus ............................................................................................................ 59
Dati di parametrizzazione: PKW............................................................................................................ 60
AK .......................................................................................................................................................... 60
PNU ....................................................................................................................................................... 61
15.6.1.1
15.7
15.8
PNU ........................................................................................................................................................... 61
IND ........................................................................................................................................................ 61
PWE ....................................................................................................................................................... 61
MANUALE D'USO
Pagina 3 di 66
SERIE CTRD -CS6621-
REV.2.5 07/11/13
15.9 Esempio di scrittura n° 1: ....................................................................................................................... 62
SCRITTURA DI P3 = 50% (VELOCITÀ JOG CW) ........................................................................................ 62
15.10
Esempio di scrittura n° 2: ................................................................................................................... 62
SCRITTURA DI S3 = 1 (JCW PRIMA, JCCW DOPO LA RAMPA) ............................................................. 62
15.11
Esempio di lettura n° 1: ...................................................................................................................... 63
LETTURA DI S10 (ESCLUSIONE ALLARMI) .............................................................................................. 63
15.12
Esempio di lettura n° 2: ...................................................................................................................... 63
LETTURA DI V6 (REAZIONE DI VELOCITÀ) ............................................................................................ 63
15.13
Dati di processo: PZD ........................................................................................................................ 64
15.14
GESTIONE ALLARMI ..................................................................................................................... 66
1.1 AVVERTENZE
•
Prima di installare e di utilizzare l’apparecchiatura leggere attentamente il manuale.
•
Si declina ogni responsabilità per qualsiasi uso improprio dell’apparecchiatura differente
da quelli prescritti nel manuale.
•
Nessuna modifica o operazione non prescritta dal manuale è consentita senza
l’autorizzazione esplicita del costruttore, e deve essere eseguita solo da personale
qualificato. In caso di mancata osservanza, il costruttore declina ogni responsabilità sulle
possibili conseguenze, e viene a decadere la garanzia.
•
La messa in servizio e l’installazione è consentita solo a personale qualificato, il quale è
responsabile del rispetto delle norme di sicurezza imposte dalle norme vigenti.
•
L’ azionamento se sprovvisto del filtro opportuno e collegato a reti pubbliche di
distribuzione a bassa tensione di zone residenziali, può provocare interferenze a radio
frequenze.
•
Nel caso specifico di impiego bisogna tenere conto delle norme di sicurezza valide per la
prevenzione degli infortuni. L'installazione, il cablaggio e l'apertura dell'apparecchiatura e
del convertitore devono avvenire in stato di assenza di tensione .
•
Apparecchiature e convertitori devono essere installati in una custodia a prova di contatto
con un grado di protezione IP secondo le norme.
•
Posizionare l’apparecchiatura in modo che sia facilitata la manutenzione, e che non ci sia
pericolo di interferenza con parti in movimento.
•
Assicurarsi che sia sempre garantita sufficiente ventilazione per smaltire le perdite del
convertitore.
•
In caso di incendio in prossimità dell’apparecchiatura non utilizzare mezzi estinguenti
contenenti acqua.
•
Evitare in ogni caso la penetrazione di acqua o altri fluidi all’interno dell’apparecchiatura.
•
Qualsiasi operazione all’interno dell’apparecchiatura deve essere fatta in assenza di
tensione. Essendo presenti condensatori, attendere almeno 5 minuti prima di accedere per
operazioni all’interno.
MANUALE D'USO
Pagina 4 di 66
SERIE CTRD -CS6621-
REV.2.5 07/11/13
2. CARATTERISTICHE
Gli azionamenti a tiristori TDE sono convertitori statici completamente digitali per il controllo della velocità e
coppia dei motori c.c. ad eccitazione indipendente. Un microprocessore a 16 bit genera tutte le funzioni del
convertitore, dalla rampa alle regolazioni alle visualizzazioni. L’algoritmo di controllo è basato su un modello
dell’insieme convertitore-motore che garantisce una dinamica particolarmente pronta. E’ possibile
modificare i parametri dell’azionamento attraverso: linea seriale optoisolata gestita da P.C, apposito
terminale operatore o tastierino a bordo scheda. Il PC permette il salvataggio dei parametri su disco come
pure il loro trasferimento ad altri azionamenti. Tutti i parametri sono accessibili tramite un menù a più livelli.
Le unità sono fornite con parametri di default interni.
La tecnologia digitale più avanzata aumenta le prestazioni del convertitore.
2.1 Generalità
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
Autotest dopo l’alimentazione e continuo controllo allarmi durante le operazioni.
Adattamento automatico della frequenza nel campo 45-65 Hz.
Allarme con indicazione del primo uscito su tastierino a bordo scheda.
Aggiustamento dei parametri e indicazioni dei segnali su: PC, tastierino, terminale operatore che può
eventualmente essere situato sul fronte porta.
Controllo visivo degli ingressi ed uscite.
Sequenze di marcia-arresto controllate dal microprocessore (inserzione contattore, abilitazione e
disabilitazione dell’azionamento).
Facile e precisa riproduzione dei valori memorizzati nell’unità.
Messa in servizio abbreviata: tutti i parametri relativi all’anello di corrente sono automaticamente
aggiustati durante la routine di autotaratura.
Aggiustamento dei parametri anche durante la marcia.
Rampa programmabile sui quattro quadranti con arrotondamento.
Due riferimenti interni di JOG.
Funzioni o configurazioni degli ingressi analogici ausiliari modificabili.
Possibilità di modificare le funzioni di controllo.
Reazione di velocità da dinamo tachimetrica o encoder.
Controllo tramite scheda interfaccia profibus (opzionale).
2.2 Ingressi - uscite
• Riferimento principale di velocità:
- da segnale analogico,
- da P.C. o terminale con impostazione digitale su linea RS232,
- da P.C. con impostazione digitale su linea RS485,
- da tastierino a bordo scheda
• Ingresso analogico per segnale aggiuntivo di velocità e 2 ingressi per riferimento o limite di corrente.
• Reazione di velocità da tachimetrica o encoder.
• Connessione indipendente per encoder con alimentazione tarabile 5-18v.
• 11 ingressi digitali optoisolati attivi con 24V presenti (LED acceso).
• 2 ingressi di blocco immediato, consenso alla marcia e sovratemperatura radiatore, ed un allarme
ritardato per mancanza eccitazione.
• 4 uscite analogiche di segnali: tachimetrica, corrente, riferimento per il regolatore di eccitazione, più una
che può essere liberamente programmata.
• 8 uscite digitali optoisolate con LED di segnalazione.
• Modi di lavoro selezionabili tramite programmazione.
2.3 Protezioni
• Test delle memorie all’inserzione alimentazioni.
• Controllo di superamento di І²t (protezione di sovratemperatura motore).
• Controllo guasto alimentazioni, fuori tolleranza rete e guasto fase, sequenza fasi, sovravelocità,
mancanza reazione velocità o sovracorrente tiristori.
• Controllo conduzione tiristori con allarme per mancata conduzione.
• Indicazione di guasto con evidenza del primo uscito.
MANUALE D'USO
Pagina 5 di 66
SERIE CTRD -CS6621-
REV.2.5 07/11/13
2.4 TAGLIE E DIMENSIONI CONVERTITORI
CORRENTE UNIDIREZIONALE
30A
CTRD-XX-030-U
50A
CTRD-XX-050-U
80A
CTRD-XX-080-U
140A
CTRD-XX-140-U
200A
CTRD-XX-200-U
280A
CTRD-XX-280-U
360A
CTRD-XX-360-U
*450A CTRD-XX-450-U
*600A CTRD-XX-600-U
*800A CTRD-XX-800-U
*1000A CTRD-XX-1000-U
BIDIREZIONALE
CTRD-XX-030-B
CTRD-XX-050-B
CTRD-XX-080-B
CTRD-XX-140-B
CTRD-XX-200-B
CTRD-XX-280-B
CTRD-XX-360-B
CTRD-XX-450-B
CTRD-XX-600-B
CTRD-XX-800-B
CTRD-XX-1000-B
VENTILATO TAGLIA
HxLxP
350x225x190
S
•
•
•
•
••
••
••
••
M
400x225x240
L
650x225x290
X
750x305x300
*Ponte raddrizzatore non presente
Dove:
XX
XX
•
••
S
= 12 per tiristori a 1200V
= 16 per tiristori a 1600V
= ventilatori alimentati internamente
=
“
“
esternamente
M
L
X
H
L
L
P
P
MANUALE D'USO
Pagina 6 di 66
SERIE CTRD -CS6621-
REV.2.5 07/11/13
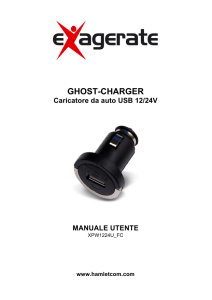
3. POTENZA: COLLEGAMENTO E DIMENSIONAMENTO FUSIBILI
CM
Contattore di potenza:
(per possibili schemi di sequenza vedi pag. 11)
Fusibili della linea e del motore (FM necessario solo per convertitori bidirezionali)
Tensione del campo: 380Vac max (non per 450 – 1000A)
Tensione di potenza: 220V ≤ Vac ≤ 415V
Tensione per alimentazione regolazione: 110V ≤ Vac ≤ 250V (max 35w)
FL-FM
Vac
Vp
Va
R
S
T
FL
1Amp
380V/220V
o 380/110V
max 35w
CM
!
REATTANZA
TRIFASE
IC
Va
Max 380 Vc
CM
CTRD...
CE3
R
S
T
4
CE1
2 3 4
0 110 220
CE2
CE4
3
2
1
CN1
+PD
-PI
FM1
-PD
+PI
0V
32 31 30
0V REF +10V
34 33 38
35
36 37
ALIMENTAZIONE
FM1
VENTILATORE
M
ALTRI INGRESSI
ANALOGICI
DT
RIFERIMENTO
DELLA VELOCITA'
3.1 Taglie fusibili CTRD (FL-FM1)
TAGLIA
CTRD
LIMITE
(Amp)
TIRISTORE
I²T( A²S)
FUSE FM1 GG SERIE ZILOX
(Amp)
FUSE FL
GG (Amp)
IND (mH)
30
34,5
SKKT27/XXE
TT25NXXK
800
1.060
50
50
DIN00/ DIN000
DIN00/ DIN000
50
0,959
50
57,5
SKKT57/XXE
TT56NXXK
8.000
9.100
100
100
DIN00/ DIN000
DIN00/ DIN-000
100
0,575
80
92
SKKT57/XXE
8.000
DIN-000
125
0,359
TT56NXXK
9.100
100
100
125A
125A
DIN-00
140
161
TT66NXXK
9.800
160
DIN-00
160
0,205
200
230
TT105NXXK
24.000
250
250
DIN-00
DIN1*
250
0,144
280
322
TT142NXXK
84.000
350
400
DIN-00
DIN1*
315
0,103
DIN-00
400
0,080
500
0,063
700
0,050
360
414
TT162NXXK
97.000
400
450
517
TT210NXXK
SKKT250/XXE
218.000
320.000
500
500
600
690
TT285NXXK
320.000
700
800
920
TT425NXXK
781.000
900
1000
1050
TT500NXXK
1.051.000
1100
MANUALE D'USO
Pagina 7 di 66
GRANDEZZA 3
SERIE CTRD -CS6621-
REV.2.5 07/11/13
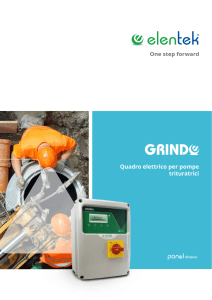
3.2 Topografico generale
CN3
CS904
CS6621
CN2
CS905
R
S
CN1
T
R
CS906
S
T
T
-PD
+PI
S
R
+PD
-PI
+M
-M
CS6621
CN1
CE1
CE3
CE2
CE4
Retro convertitore
CE1 = alimentazione scheda regolazione: 110/220vac max 35w
CE2 = non utilizzato
CE3 = alimentazione campo
CE4 = alimentazione ventilatori (fino a 360A)
MANUALE D'USO
Pagina 8 di 66
SERIE CTRD -CS6621-
REV.2.5 07/11/13
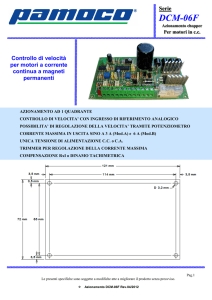
CS6621 SCHEDA REGOLAZIONE
CN2
CN3
L2
L3
J1
P1
L4 L5 L6 L7
J3
µ
J4
JP4
JP3
J5J6
R170
R171
R173
R174
J7J8
L8 L9 L10 L11 L12 L13 L14 L15
L16 L17 L18 L19 L20 L21 L22 L23
L36
P3
J10 P2
T
L
L24 L25 L26 L27 L28 L29 L30 L31 L32 L33 L34 L35
J13
1
CN6
8
J11
J14
J12
CN1
1
40
CS904 ALIMENTATORE SWITCHING E SINCRONISMI
RES 0V +24V
CN3
0V 110V 220V
T1
S1
R1
1.5A
250V
CS905 ACCENDITORI E TAGLIA IN CORRENTE
R1
R2
R3
CN2
TA4
TA3
TA2
TA1
mE
+24V
-24V
-PT
PD
T-
PI
T+
PD
S-
PI
S+
PD
R-
PI
R+
KG
KG
KG
KG
KG
KG
KG
KG
KG
KG
KG
KG
SPI
S+
PD
RPI
R+
PD
TPI
+E
T+
PD
-E
CS906 FILTRI R-C
T
S
R
R1
S1
T1
+PD
-PI
-PI
+PD
CS 8G3 TASTIERINO
s
MANUALE D'USO
-
+
Pagina 9 di 66
SERIE CTRD -CS6621-
MANUALE D'USO
Pagina 10 di 66
+PD/-PI
-PD/+PI
R
S
T
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
TA1
4
3
2
1
TA2
TA3
TA4
T1 S1 R1
CS906
JP3
-E
+E
G
G
K
R+
PD
K
RPD
MARCIA
CW
CCW
JOGCW
JOGCCW
RAMP EXCLUDED
IPD ENABLING
IPI ENABLING
ENABLING OF ADDITIONAL SIGNAL
RESET
RUN WITH DELAY
ENABLING 1
READT TO RUN
END OF RAMP
MIN.VEL./CONT.
EXTERNAL PROTECTION
FEEDING AND NETWORK CONTROL
CURRENT CONTROL
SPEED REACTION CONTROL
MOTOR THERMIC
0C
+24C
+24I
0PI
PWN1
PWN
0S
DT0
-I
+5E
DT2
DT1
0DGE
*DT
DSR
RF+
0DGE
0RF
DTR
SA
IPD
TX
IPI
RX
+10V
+5E
0S
-10V
1 2 3 4 5 6 7 8 9
CE3
CN1
1
G
G
K
RPI
K
R+
PI
JP4
RX
TX
TERM+
TERM0DGE
0DGE
TX/RX+
TX/RX-
OUT
INP
G
G
K
S+
PD
K
SPD
G
G
K
SPI
K
S+
PI
1 2 3 4 5 6 7 8 9
G
G
CS6608
CS 6621
K
T+
PD
K
TPD
G
G
K
TPI
K
T+
PI
R+
RS+
ST+
TPI
PD
mE
+24C
PT
-I
+I
Rs
Cs
Ts
Ss
0DGE
+8E
0DG
+8I
+VA
-18V
0P
+24PI
CE4
3/4
5/6
7/8
9/10
11/12
13/14/16
15/17/18
19
20/22
21
23/24
25/26
CN2
1/2
M
1 2 3 4
0V
+24V
Pt
2
3
4
5/6/7/8
9/10/11/12
13/14/16
15/17
18
19
20/21/22/24
23/25/26
CN3
1
+24C
PT
-E
+E
mE
+24C
+24C
PT
TA1
TA2
TA3
TA4
CN4
23/24
25/26
19
20/22
21
15/17/18
13/14/16
11/12
9/10
7/8
5/6
3/4
1/2
CN3
23/25/26
19
20/21/22/
24
18
15/17
13/14/16
5/6/7/8
9/10/11/
12
4
3
2
1
R1
-I
+I
mE
+24C
PT
PD
PI
T-
T+
S-
S+
R-
R+
+24PI
0P
-18V
+VA
+8I
0DG
+8E
0DGE
Ss
Ts
Cs
Rs
R2 R3
CS905
CS904
250V
1.5A
R1
K
G
K
G
K
G
K
G
K
G
K
G
K
G
K
G
K
G
K
G
K
G
K
G
0V
+24V
+24V
RES
220
110
0
T1
S1
T+ PI
T- PD
T- PI
T+ PD
S+ PI
S- PD
S- PI
S+ PD
R+ PI
R- PD
R- PI
R+ PD
4
3
2
1
CE2
REV.2.5 07/11/13
SERIE CTRD -CS6621-
REV.2.5 07/11/13
3.3 Contattore sempre inserito e arresto con minima velocità
CN1
RUN/STOP
STOP
1
MARCIA
2
ABILIT.CW
ABILIT.CCW
ABIL.MARCIA CON RITARDO
3
11
+24VP
RESET
IC
EMERGENZA *MICRO FUSE
13
PRONTO MARCIA
15
MARCIA CON MINIMA VELOCITÀ
10
RIPRISTINO ALLARMI
23
ALIM. INTERNE NON
STABILIZZATE
+24VP
0P
24
12
+24C
ABILIT.ESTERNA
22
0C
21
ALIMENT. IN-OUT
IC = CONTATTORE AUSILIARIO
3.4 Contattore chiude-apre e arresto con minima velocità
CN1
RUN/STOP
1
MARCIA
2
13
ABIL. CW
ABIL. CCW
PRONTO MARCIA
11
ABIL. MARCIA CON RITARDO
15
AZIONAM.IN MARCIA
MINIMA VELOCITA
23
24
ALIM.INTERNE NON
STABILIZZATE
10
RIPRISTINO ALLARMI
12
ABIL.ESTERNA
STOP
3
X
*
MICRO FUSE RESET
IC
+24VP
0P
EMERGENZA
+24C
22
0C
21
ALIMENT.IN-OUT
IC = CONTATTORE AUSILIARIO
* N.B. SE NON SI ESEGUE LA CONNESSIONE INDICATA CON X, QUANDO SI TOGLIE MARCIA,
IL CONVERTITORE VA IN ARRESTO SENZA ATTENDERE LA MIN. VELOCITA’
MANUALE D'USO
Pagina 11 di 66
SERIE CTRD -CS6621-
REV.2.5 07/11/13
3.5 Significato dei segnali logici (connettore CN1):
1
Marcia
Mette in marcia il convertitore purchè ci siano tutti i
consensi interni ed esterni.
2
Abilitazione CW
Abilita il riferimento di velocità entrante ai morsetti 33-34
con il suo segno.
3
Abilitazione CCW
Abilita il riferimento di velocità entrante ai morsetti 33-34
con il segno opposto.
4
Abilitazione rotazione JOG-CW
Abilita come riferimento di velocità il parametro P3 con il
suo segno.
5
Abilitazione rotazione JOG-CCW
Abilita come riferimento di velocità il parametro P4 con il
suo segno opposto.
6
Esclusione rampa
Provoca l’esclusione della rampa.
7
Abilitazione IPD
Abilita il segnale IPD.
8
Abilitazione IPI
Abilita il segnale IPI.
9
Abilitazione S. Agg.
Abilita il segnale aggiuntivo.
10
Reset allarmi
Resetta la memoria d’allarme.
11
Marcia con ritardo
Abilita la messa in marcia trascorso il tempo d’attesa P46.
12
Consenso 1
Abilita il consenso esterno. Se manca va in allarme.
13
Azionamento pronto
Attivo se l'azionamento è pronto (assenza di allarmi).
14
Fine rampa
Attivo quando l’uscita della rampa è uguale all’ingresso
15
Azionamento in marcia/minima
velocità
Attivo se S6=1 e l'azionamento è in marcia, se S6=0 attivo
quando supera la minima velocità.
16
Protezioni esterne
Attivo quando manca anche uno solo degli ingressi esterni.
17
Controllo rete e alimentazioni
Attivo con qualsiasi allarme relativo alla rete o alle
alimentazioni interne.
18
Controllo corrente
Attivo con qualsiasi allarme relativo alla conduzione del
convertitore alle mancate conduzioni dei tiristori.
19
Controllo reazione di velocità
Attivo con qualsiasi allarme relativo alla reazione di velocità
(tachimetrica o encoder).
20
Termico motore
Attivo quando si superano le costanti termiche del motore
(non blocca l’azionamento).
21
0c
E’ il comune negativo di tutti gli ingressi e uscite.
22
+24c
E’ il comune positivo di tutti gli ingressi e uscite (richiede
+24v di alimentazione).
23
+24v
Alimentazione non stabilizzata
eventuali carichi esterni.
24
Op
Zero riferito all’uscita del +24v.
+24v
disponibile
N.B.: 1÷12 sono comandati con segnali compresi in un range di 20V÷30V.
MANUALE D'USO
Pagina 12 di 66
SERIE CTRD -CS6621-
per
REV.2.5 07/11/13
3.6 Significato dei segnali analogici (connettore CN1):
25
OA1
Uscita della grandezza per il pilotaggio della scheda
eccitazione ES 95003 (opzionale).
26
OA2
Uscita analogica programmabile tramite SW1.
27
Ov comune
Zero comune per le uscite OA1-OA2.
28
Uscita analogica di velocità
Uscita normalizzata della tachimetrica.
29
Uscita analogica di corrente
Uscita normalizzata della corrente.
30
Ingresso DT2
Ingresso per dinamo tachimetrica 40-180v.
31
Ingresso DT1
Ingresso per dinamo tachimetrica 5-40v.
32
Ov comune
Zero comune per l’ingresso tachimetrica.
33
Ingresso riferimento analogico
Ingresso per riferimento di velocità.
34
Ov comune
Zero comune per gli ingressi 33-35-36-37.
35
Segnale aggiuntivo
Ingresso analogico per il segnale di riferimento aggiuntivo.
36
Segnale IPD
Ingresso analogico per il segnale di limite del ponte diretto.
37
Segnale IPI
Ingresso analogico per il segnale di limite del ponte
inverso.
38
Tensione di riferimento
Uscita della tensione di riferimento del +10v.
39
Ov comune
Zero comune per le uscite 38-40.
40
Tensione di riferimento
Uscita della tensione di riferimento del -10v.
MANUALE D'USO
Pagina 13 di 66
SERIE CTRD -CS6621-
REV.2.5 07/11/13
4. DESCRIZIONE DATI FONDAMENTALI
Per avere una visione generale dei dati a disposizione dell’utente consultare il capitolo 9, pag. 28 del
manuale.
5.
PROCEDURA DI MESSA IN SERVIZIO
La descrizione si riferisce all’uso del tastierino CS 8ET montato a bordo scheda (tra parentesi per l’uso
con terminale operatore o PC, capitolo 12, pag 46).
1) L'azionamento è consegnato con il limite di corrente già predisposto nel valore massimo 1,15 Ιn,
vedi targhetta apposta sul fianco del convertitore, con i parametri P53, P54, P55 predisposti nei
valori rispettivamente di 86,9%, 10s e 150%. Nel caso che l'applicazione richiedesse di
aumentare il limite occorre contattare la TDE MACNO.
2) A seconda se unidirezionale o bidirezionale, l'azionamento è già predisposto per il funzionamento
a due o quattro quadranti; se però vengono caricati i parametri di Default e l'azionamento è
unidirezionale occorre ripristinare il tipo di convertitore.
3)
Prima di dare tensione verificare che tutti i collegamenti siano fatti a regola d'arte e siano
conformi allo schema.
4) Dare tensione alla regolazione ed inserire, eventualmente, il terminale operatore o il personal
computer dopo aver predisposto i cavi di collegamento come descritto a pag. 19 (per il terminale
o PC vedi l’operatività a pag.46). Per il PC occorre caricare il software di gestione tramite "AZBAT", compare il menù su cui si devono operare le scelte desiderate; la password con cui viene
dato il software è "TDEautom", modificabile in seguito come si vuole con lettere o numeri fino a 8
cifre.
N.B.: Se per qualsiasi motivo vengono ricaricati i parametri di Default occorre riportare P53, P54, P55 ai
valori sopraindicati, altrimenti si corre il rischio che intervenga l'allarme termico azionamento.
5) Per correggere i parametri "Riservati" occorre caricare la chiave 92 al parametro P80; l'accesso
ai parametri riservati rimane valido fino a che l'azionamento rimane in tensione (PC o terminale
operatore P80=1992).
6) Se dopo aver dato tensione compaiono degli allarmi, prendere i provvedimenti relativi (vedi
tabella allarmi, pag. 16); comunque anche se non compare alcun allarme, occorre "TARARE" la
tensione di rete secondo la procedura che segue:
a) chiudere il contattore, leggere la tensione di rete e calcolare il valore: Vrete/Vrete nom. x 100,
b) mettersi in D17 ("visualizzazione” ⇒ “grandezze interne" ⇒ ”V17”) ed aggiustare il trimmer
"P1" sulla scheda fino a che si legge il valore sopra calcolato.
N.B. Tenere tale valore 2 - 3% più alto considerando che poi, con l'alimentatore a carico, la tensione
interna potrebbe scendere (dipende dall'impendenza di linea).
7) Passare in P31 ("predisposizioni” ⇒ “parametri “ ⇒ P31) e caricare il valore dato dalla formula:
Ιn motore/Ιllimite x 100.
8) Scegliere P38 e caricare il valore: Vm/Veff.rete x 100 dove:
Vm è la tensione a vuoto del motore ai giri nominali e
Veff. rete è la tensione nominale di rete.
MANUALE D'USO
Pagina 14 di 66
SERIE CTRD -CS6621-
REV.2.5 07/11/13
9) Tarare l’ingresso di tachimetrica come segue:
a) calcolare la tensione della dinamo ai giri nominali del motore, in modo da scegliere l’ingresso
adeguato e se il Jumper J10, tabelle pag. 37, andrà inserito in posizone di lavoro "L" o meno,
b) mettere il jumper J10 in test, posizione "T" e calcolare con la formula relativa al collegamento
sopra scelto, tabelle pag. 37, il valore che dovrà essere letto in % su "D6",
c) passare in "D6” (“visualizzazioni”⇒”grandezze interne”⇒”V6”) e ruotare il trimmer di taratura
tachimetrica P2 fino a leggere tale valore,
d) togliere il Jumper da "T" e, se previsto, connetterlo in "L". La taratura è finita salvo
piccolissimi ritocchi da fare una volta in marcia ai giri massimi.
(es.: DT= 100V scelto l'ingresso DT2 con il Jumper J10 chiuso su L, durante la taratura su D6
si deve leggere
3630
------- % = 36,3%
100
N.B. fare riferimento alla posizione “T” ed “L” a pag. 9
10) Togliere il campo al motore, chiudere il teleruttore di linea se per sequenza non viene chiuso
dall'uscita 03 (CN1-15) ma non chiudere CN1-1, altrimenti si va in marcia, attivare C 71=1
("autotarature” ⇒ “anello di corrente"). L'autotaratura va eseguita portando il motore fino alla
corrente limite prevista ed impostata in P29 e P30; se non si vuole una corrente troppo alta, si
può abbassare il limite; è consigliabile non andare comunque sotto la corrente nominale. Se si
ritocca il limite, alla fine dell'autotaratura occorre ripristinarlo e nuovamente memorizzarlo nella
EEPROM con C76=1( “memorizzazioni” ⇒ “salvataggio parametri su eeprom”). Il sistema
esegue l'autotaratura dell'anello di corrente che si conclude con il calcolo e salvataggio dei
parametri P39, P40. Se durante tale fase il sistema va in allarme, verificarli nel menù
("visualizzazione” ⇒ “allarmi") e prendere i provvedimenti relativi.
I possibili allarmi sono:
A8: ALLARME CONDUZIONE
A9: MOTORE IN MOVIMENTO
DURANTE AUTOTARATURA
A 12: CORRENTE MAI CONTINUA IN
AUTOTARATURA
A13: AUTOTARATURA IMPOSSIBILE
A16: CADUTA RESISTENZA TROPPO
ELEVATA
MANUALE D'USO
Verificare tiristori, collegamenti,teleruttori chiusi, etc.
Significa che il motore si muove durante l'autotaratura:
campo ancora presente (scollegare), motore con
magnetismo residuo o serie molto elevata (bloccare il
motore).Se il movimento risultasse appena impercettibile:
scollegare la tachimetrica.
Significa che il motore è troppo poco induttivo per il limite di
corrente impostato; bisogna allora aumentare il limite
diminuendo la resistenza di carico dei TA fino a portare la
corrente di limite ad un valore continuo ed eventualmente poi
abbassare "P29" e "P30" (limiti massimi di corrente) fino al
valore desiderato; si deve comunque considerare che il
motore lavorando in tali condizioni assorbe una Ιeff. molto
superiore
alla
corrente
continua,
con
eccessivo
sovrariscaldamento, per cui deve essere declassato.
Significa che il motore è talmente induttivo da mettere in crisi
il sistema. La cosa è pressochè impossibile in quanto il limite
di funzionamento del sistema si ha per un valore di picco
della corrente al limite di continuità minore del 3% della
corrente limite.
Il sistema non funziona se la caduta interna percentuale del
motore riferita alla corrente nominale supera il 40 % del
valore della tensione del motore o se la caduta in limite
supera il 50 % della tensione della concatenata,
Se si è nel primo caso ma distante dal secondo è sufficiente
abbassare P31 (Ιnom/Ιlim) e rifare l'autotaratura.
Pagina 15 di 66
SERIE CTRD -CS6621-
REV.2.5 07/11/13
11) Riconnettere il campo, abbassare la corrente limite P29/P30 = 20% e fare marcia con il
riferimento superiore a zero. Se interviene l'allarme della tachimetrica agire in conseguenza.
12) Portare gradualmente il motore al 100%(se il sistema lo accetta) della velocità verificando la
stabilità (eventualmente correggere P23 e P24) e ritoccare il trimmer P2 se la velocità è diversa
da quella desiderata.
13) A velocità massima (100%) leggere in "D18" (“visualizzazioni” ⇒ ”grandezze interne” ⇒ “V18”) la
forza elettromotrice e se il motore è diseccitato legger in "D6” (“V6") il numero di giri in %
corrispondenti all'inizio diseccitazione. Fermare il motore e riportare il valore letto in "D6" al
parametro P37 ed il valore letto in “D18" al parametro P38; indi salvare i parametri su EEPROM
con C76=1.
14) Eseguire tutte le altre variazioni se richieste dal funzionamento della macchina rampa, jog, limiti,
collegamenti interni, etc.; indi salvare i parametri o connessioni interne.
15) Riportare sul bollettino di collaudo allegato al convertitora tutti i parametri per una evenutale
sostituzione, oppure salvare su disco (“memorizzazioni” ⇒ “salvataggio su disco”).
5.1 Malfunzionamenti con segnalazione d’allarme: diagnosi
PROTEZIONE
DESCRIZIONE
ATTIVA
A1
Allarme micro Scheda regolazione con
problemi di funzionamento
A2
Allarme RAM Il convertitore ha letto dei
e EEPROM
valori di parametri errati
A3
A4
A5
A6
A7
Allarme senso
ciclico
Allarme
mancanza
fase
Allarme
tensione rete
Allarme
tensioni
interne non
corrette
Allarme picco
di corrente
La sequenza fasi non è
corretta
Manca una delle fasi in
ingresso
Indica una variazione della
tensione di rete
Indica un guasto ad una delle
alimentazioni interne
Controlla che il picco
istantaneo di corrente sia
inferiore al livello massimo
ammesso
Verifica la corretta conduzione
dei tiristori
A8
Allarme
conduzioni
A9
Allarme
reazione
velocità
Verifica l’integrità del
collegamento della
tachimetrica (D.T.) e la
polarità
A10
Allarme
Interviene se il valore di D.T.
MANUALE D'USO
PROVVEDIMENTI DI RIMEDIO
Sostituire la scheda regolazione.
Se non si riesce ad eliminare il problema
spegnendo e accendendo il convertitore eseguire
C74=1 (“memorizzazioni”⇒“ripristino valori di
default”), oppure C75=1 (“memorizzazioni”⇒
“ripristino EEPROM”) e successivamente C76=1
(“memorizzazioni” ⇒ “scrittura in EEPROM”).
Invertire due fasi in entrata al convertitore (es: fasi
R-T).
Verificare le connessioni di potenza in ingresso
Verificare la stabilità della rete o modificare il range
di tolleranza tramite i parametri P49-P50
Verificare
la
funzionalitaà
della
scheda
alimentatore CS 904, se le alimentazioni sono tutte
presenti sostituire la scheda CS 6621.
Verificare che i tiristori non siano danneggiati o
declassati, verficare inoltre eventuali cortocircuiti
sul motore.
Verificare l’integrità del contattore di linea o la
continuità della armatura: fusibili, contattore,
connessioni…
Se interviene verificare l’integrità del collegamento
della tachimetrica o il corretto verso di
collegamento (invertire eventualmente).
Può intervenire se il motore è trascinato dal carico.
Pagina 16 di 66
SERIE CTRD -CS6621-
REV.2.5 07/11/13
sovravelocità
A11
Allarme
termico
motore
A12
Allarme
corrente mai
continua in
autotaratura
Allarme
autotaratura
impossibile
Allarme
protezioni
esterne
Allarme
frequenza
fuori range
Allarme
tensione
motore
A13
A14
A15
A16
supera la velocità impostata in
P51
Interviene se si supera il
Questo allarme può insorgere se il motore lavora in
valore calcolato in P48
cicli di lavorazione che prevedono frequenti
sovraccarichi. Verificare il dimensionamento del
sistema motore-azionamento o le tarature dei limiti
di corrente.
Il motore è troppo poco
Aumentare la taglia del convertitore e ridurre
induttivo per il limite di
successivamente i limiti P29-P30.
corrente impostato
Il motore è eccessivamente
induttivo
Praticamente impossibile per motori standard.
Manca l’ingresso esternoo la
Verificare la presenza degli appositi ingressi o la
eccitazione o la pastiglia
corretta connessione del ov/+24v su CN1-21/22.
termica radiatore
Indica che la frequenza è fuori Verificare la stabilità della rete.
range (45-65Hz)
Si è superata la tensione
nominale del motore
Verificare l’impostazione del parametro P38 o
rieseguire l’autotaratura dell’anello di corente.
6. ACCORGIMENTI ANTIDISTURBO
Apparecchiature elettriche od elettroniche possono influenzarsi reciprocamente per via dei collegamenti di
rete od altre connessioni metalliche fra di loro. Al fine di minimizzare od eliminare l’influenza reciproca, è
necessaria una corretta installazione del convertitore stesso in congiunzione con eventuali accorgimenti
antidisturbo.
I seguenti avvisi si riferiscono ad una rete di alimentazione non disturbata. Se la rete è disturbata, devono
essere presi altri accorgimenti per ridurre i disturbi.
In questi casi non è possibile dare dei consigli generali e se gli accorgimenti antidisturbo non dovessero
dare i risultati desiderati, preghiamo di interpellare la TDE MACNO.
• Assicurarsi che tutti gli equipaggiamenti nell'armadio siano bene collegati alla sbarra di terra usando cavi
corti connessi a stella. È particolarmente importante che qualsiasi equipaggiamento di controllo
connesso al convertitore, ad esempio PLC, sia connesso alla stessa terra con cavi corti.
• Il convertitore deve essere fissato con viti e rondelle dentellate per garantire un buon collegamento
elettrico tra il contenitore esterno ed il supporto metallico che è collegato alla terra del quadro.
• Tenere separati e distanziati tra di loro i cavi di collegamento del motore, del convertitore ed i cavi di
controllo.
• Posare i cavi di controllo distanti almeno 10 cm da eventuali cavi di potenza paralleli. Anche in questo
caso è consigliabile l’uso di una canaletta metallica separata e collegata a terra. Se i cavi di controllo si
dovessero incrociare con i cavi di potenza, mantenere un angolo d’incrocio di 90°C.
• Nel caso in cui i gruppi R-C, per bobine in AC, o diodi volano, per le bobine in CC dei teleruttori, relè ed
altri commutatori elettromeccanici fossero installati nello stesso armadio del convertitore, bisogna
prevedere di montarli direttamente sui collegamenti delle bobine stesse.
• Eseguire tutti i collegamenti di controllo, misurazione e regolazione esterni con cavi schermati.
• Cavi sui quali si possono diffondere disturbi devono essere posati separatamente e distanti dai cavi di
controllo del convertitore.
MANUALE D'USO
Pagina 17 di 66
SERIE CTRD -CS6621-
REV.2.5 07/11/13
Se il convertitore deve operare in un ambiente particolarmente sensibile al rumore occorre, inoltre,
prendere i seguenti provvedimenti per ridurre le interferenze condotte e irradiate:
• Usare un filtro EMC monofase (tipo: Schaffner, RAFI, Rimonta, ecc.), da connettere in serie al CE1, per
alimentare la scheda regolazione.
• Adottare per l' armadio tutti gli accorgimenti possibili atti a bloccare le emissioni irradiate quali messa a
terra di tutte le parti metalliche, minima apertura di fori sull'involucro esterno, uso di guarnizioni
conduttrici.
7. DESCRIZIONE DEI SEGNALI SUI CONNETTORI
7.1 Comunicazione con PC o terminale operatore (connettore JP3)
JP3
JP3 - 1 +5E
JP3 - 2 RX
JP3 - 3 TX
JP3- 4 DTR
JP3 - 5 0DGE
JP3 - 6 DSR
JP3 - 9 +5E
JP3 - 4,6,7,8, nc
5
9
4
8
3
7
2
6
1
vaschetta DB9 vie maschio
PORTA RS - 232
Connettore da collegare alla porta seriale di un PC
o al terminale operatore per programmare la
scheda.
I segnali d' ingresso ed uscita sono compatibili con
lo standard RS232.
Le uscite sono galvanicamente isolate rispetto ai
circuiti di controllo.
7.2 Cavo di collegamento tra connettore JP3 e RS232 di un PC
JP3
PC
0DG
RING
DTR
CTS
TXD
RTS
RXD
DSR
CDT
5
9
4
8
3
7
2
6
1
N.C
N.C
N.C
N.C
N.C
VASCHETTA
9 VIE FEMMINA
5
9
4
8
3
7
2
6
1
0DGE
TX
RX
DSR
+5E
VASCHETTA
9 VIE FEMMINA
7.3 Cavo di collegamento tra connettore JP3 e terminale operatore
JP3
TERMINALE OPER.
5
9
4
8
3
7
2
6
1
5
9
4
8
3
7
2
6
1
VASC. 9 VIE FEMMINA
MANUALE D'USO
VASC. 9 VIE FEMMINA
Pagina 18 di 66
SERIE CTRD -CS6621-
REV.2.5 07/11/13
7.4 ConnettoreJP4
JP4
5
9
4
8
3
7
2
6
1
vaschetta DB9 vie femm.
IP4 - 1 TX
IP4 - 2 RX
IP4 - 3 +5E
IP4 - 4 TX/RXIP4 - 5 TX/RX+
IP4 - 6 0DGE
IP4 - 7 0DGE
IP4 - 8 TERM IP4 - 9 TERM +
JP4 contiene sia i segnali TX e RX relativi alla
porta RS232, sia i segnali alla porta diffe- renziale
RS485. Il comune per entrambe le porte è sulla
connessione JP4-6/7, mentre le connessioni
JP4/8/9 portano in uscita le terminazioni per
adattare la linea. Per terminare la linea JP4/9 va
collegato al JP9/5 e JP4/8 al JP4/4. Tutti si
segnali, comprese le alimentazioni, sono isolati
galvanicamente rispetto ai circuiti di controllo.
La linea seriale comunica in half duplex su quattro fili: RX+ ed RX- sono fili di ricezione per
l'azionamento mentre TX+ ed TX- sono fili di trasmissione. Si può fare il collegamento con solo due fili
collegando fra loro RX+ e TX+ ed RX- e TX- (i fili di comunicazione devono essere twistati, TX+ e
RX+ sono a livello alto a riposo).
7.5 Segnali sulle morsettiere
CN1
1
24V 5mA
SEGNALE
MARCIA
LED
L24
2
24V 5Ma
ABILITAZIONE CW
L25
3
24V 5mA
ABILITAZIONE CCW
L26
4
24V 5mA
JOG CW
L27
5
24V 5mA
JOG CCW
L28
6
24V 5mA
RAMPA ESCLUSA
L29
7
24V 5mA
ABILITAZIONE IPD
L30
8
24V 5mA
ABILITAZIONE IPI
L31
9
24V 5mA
ABILIT.SEGN.AGGIUNTIVO
L32
10
24V 5mA
RESET ALLARMI
L33
11
24V 5mA
ABILIT. MARCIA CON RITARDO
L34
12
24V 5mA
ABILITAZIONE ESTERNA
L35
CN2
21
24V 5mA
SEGNALE
PROTEZIONE TERMICA
LED
L5
19
24V 5mA
MANCANZA ECCITAZIONE
CN1
21
0C
C
22
+24C
+V
MANUALE D'USO
Pagina 19 di 66
L6
SERIE CTRD -CS6621-
REV.2.5 07/11/13
LED
L16
SEGNALE
PRONTO MARCIA
CN1
24V 80mA 13
L17
FINE DELLA RAMPA
24V 80mA 14
L18
S6 = 0 ≥ MIN. VELOCITÁ
S6 = 1 AZ. IN MARCIA
PROTEZIONE ESTERNA
24V 80mA 15
ALLARME RETE E ALIMENT.
MONITORAGGIO
MONITORAGGIO CORRENTE
24V 80mA 17
CONTROLLO VELOCITÁ
FEEDBACK
TERMICO MOTORE
24V 80mA 19
L19
L20
L21
L22
L23
24V 80mA 16
24V 80mA 18
24V 80mA 20
Uscite analogiche
D/A
25
± 10V 2mA
100 Ω
D/A
26
± 10V 2mA
100 Ω
27
MANUALE D'USO
Pagina 20 di 66
SERIE CTRD -CS6621-
REV.2.5 07/11/13
7.6 Collegamenti dei segnali esterni al connettore CN1
INGRESSI DIGITALI (0÷+24V)
I livelli di tensione ammessi agli ingressi digitali sono:
VL = 0 ÷4 V VH = 20 ÷ 30 V Іin = 5mA
CN1/1 - I1 Abilitazione marcia
1
L24
21
CN1/2 - I2 Abilitazione rotazione
CW
CN1/3 - I3 Abilitazione rotazione
CCW
CN1/4 - I4Abilitazione Jog-CW
2
L25
Abilita il riferimento di velocità entrante ai
morsetti 33-34 con il suo segno. La
tachimetrica avrà lo stesso segno del
riferimento.
L26
Abilita il riferimento di velocità entrante ai
morsetti 33-34 con segno rovesciato. La
tachimetrica avrà segno opposto del
riferimento.
21
3
21
4
L27
21
CN1/5 - I5Abilitazione Jog-CCW
5
L28
21
CN1/6 - I6Esclusione rampa
Si abilitano i riferimenti e si mette in marcia
l’azionamento purché ci siano tutti i consensi
interni ed esterni. Se l’azionamento é in
marcia e si apre I1, al raggiungimento della
minima velocità l’azionamento va in blocco.
6
L29
Abilita come riferimento di velocità il
parametro P3 con il suo segno (P3 positivo
⇒ DT positivo).
Abilita come riferimento di velocità il
parametro P4 con segno rovesciato (P4
positivo ⇒ DT negativo).
L’abilitazione provoca l’esclusione della
rampa.
21
CN1/7 - I7Abilitazione IPD
7
L30
Si abilita il segnale IPD secondo la funzione
programmata con S7. Se IPD non é abilitato,
il limite massimo interno per il ponte diretto é
dato dal parametro P29.
L31
Si abilita il segnale IPI secondo la funzione
programmata con S7. Se IPI non é abilitato,
il limite massimo interno per il ponte inverso
é dato dal parametro P30.
21
CN1/8 - I8Abilitazione IPI
8
21
MANUALE D'USO
Pagina 21 di 66
SERIE CTRD -CS6621-
REV.2.5 07/11/13
9
CN1/9 - I9Abilitazione segnale
aggiuntivo
L32
Si abilita il segnale aggiuntivo secondo la
funzione programmata con S4. Tale segnale
tiene conto dei coefficienti correttivi P6
proporzionale e P5 assoluto.
L33
Si ripristinano le memorie di allarme se non
ci sono più allarmi presenti. Il ripristino
avviene solo sul fronte di salita del segnale
in ingresso.
L34
Si
abilita
la
messa
in
marcia
dell’azionamento trascorso il tempo di attesa
P46.
Se
aperto,
l’azionamento
va
immediatamente in blocco.
21
10
CN1/10 - I10Reset allarmi
21
11
CN1/11 - I11Abilitazione marcia
con ritardo
21
12
CN1/12 - I12Consenso 12
Si dal consenso esterno all’azionamento. Se
manca
anche
transitoriamente
è
memorizzata la situazione e quindi occorre
ripristinare. Al mancare, si ha il blocco
dell’azionamento.
L35
21
24C
CN1\13 - O1Pronto marcia
Imax 40 mA
13
L16
21
0C
24C
CN1/14 – O2Fine rampa
Imax 40 mA
14
L17
21
CN1/15 - O3 Azionamento in
marcia/
minima velocità
Imax 40 mA
MANUALE D'USO
+24V:
(LED ACCESO)
Si porta a +24V quando l’azionamento é in
marcia e l’uscita della rampa diventa uguale
all’ingresso. Con l’azionamento in stop si
porta a 0V.
0C
24C
15
L18
21
+24V:
(LED ACCESO)
Se l’azionamento non presenta alcun
allarme, tale uscita si porta a +24V; l’uscita
si apre al verificarsi di qualsiasi allarme,
escluso l’allarme termico, e rimane in tale
situazione sino a successivo ripristino.
0C
Pagina 22 di 66
+24V:
(LED ACCESO)
Se S6=1 e l’azionamento é in marcia oppure
se S6=0 e si supera la minima velocità allora
tale uscita si porta a +24V. In arresto é in
ogni caso a 0V anche se il motore é in
rotazione.
SERIE CTRD -CS6621-
REV.2.5 07/11/13
24C
CN1/16 - O4 Protezioni esterne
Imax 40 mA
16
L19
21
0C
24C
CN1/17 - O5 Controllo rete e
alimentazioni
17
Imax 40 mA
L20
21
0C
24C
CN1/18 - 06 Controllo corrente
Imax 40 mA
18
L21
21
0C
24C
CN1/19 - O7 Controllo tachimetrica
Imax 40 mA
19
L22
21
20
L23
21
0C
CN1/21
Comune negativo
21
0C
CN1/22
Comune positivo
24V max 200mA
22
+24C
MANUALE D'USO
+24V:
(LED ACCESO)
Segnala portandosi a +24V un qualsiasi
allarme relativo alla rete, senso ciclico
rovescio, mancanza fase, tensione fuori
tolleranza (P49, P50) ed alle alimentazioni
interne alla scheda. Blocca l’azionamento e
rimane memorizzato.
+24V:
(LED ACCESO)
Segnala portandosi a +24V qualsiasi allarme
relativo alla conduzione del convertitore
come la massima corrente istantanea e la
mancata conduzione di uno o più tiristori.
Blocca l’azionamento e rimane memorizzata.
+24V:
(LED ACCESO)
Segnala portandosi a +24V qualsiasi allarme
relativo alla velocità come tachimetrica
assente, rovescia o per sovravelocità (P51).
Blocca l’azionamento e rimane memorizzato.
0C
24C
CN1/20 - O8 Termico motore
Imax 40 mA
+24V:
(LED ACCESO)
Segnala portandosi a +24V la mancanza
anche solo transitoria di uno dei consensi
esterni (consenso 1, pastiglia termica,
mancanza eccitazione); l’azionamento va in
blocco immediato.
Il blocco rimane memorizzato ed occorre
ripristinare.
Pagina 23 di 66
+24V:
(LED ACCESO)
Segnala portandosi a +24V il superamento
della corrente termica (P45) rallentata con la
costante termica (P44). Il calcolo è fatto
considerando il quadrato della corrente
media ed è elaborato anche con
l’azionamento in arresto. L’allarme é solo
segnalato e non blocca l’azionamento.
Comune negativo di tutti gli ingressi e le
uscite digitali.
E’ il comune positivo di tutte le uscite digitali.
Richiede 24V di alimentazione.
SERIE CTRD -CS6621-
REV.2.5 07/11/13
23
CN1/23-24
Alimentazione non
stabilizzata
24V ±10% max
200mA
CN1/25 - OA1Uscita analogica
± 10V / 2 mA
Alimentazione non stabilizzata della scheda.
Puó essere usata per carichi esterni quali
ingressi ed uscite logiche con un massimo di
200 mA.
+VP
+
24
0P
Uscita analogica relativa al controllo della
scheda eccitatrice ES95003 (opzionale),
proviene da un amplificatore operazionale
con in serie una resistenza da 100Ω.
-
25
+
100
0.01u
27
CN1/26- OA2Uscita analogica
± 10V / 2 mA
Uscita analogica relativa ad una grandezza
interna selezionabile tramite lo switch S1. Il
valore é compreso tra ±10V e proviene da
un amplificatore operazionale con in serie
una resistenza da 100Ω.
-
26
+
100
0.01u
27
CN1/27
Comune 0s
CN1/28 - OA3 Uscita analogica di
velocità
± 10V - 2 mA
CN1/29 - OA4 Uscita anlogica di
corrente
± 10V - 2 mA
CN1/30/31/32
Ingressi dinamo
tachimetrica
DT1: 5V÷40V,
DT2: 40V÷180V
27
0V delle uscite analogiche.
0S
Uscita normalizzata della tachimetrica
(10V=100% di velocitá). Puó servire per una
lettura analogica, e proviene da un
amplificatore operazionale con in serie una
resistenza da 100Ω.
-
28
+
100
0.01u
27
Uscita normalizzata della corrente con segno
positivo per conduzione del ponte diretto e
segno negativo per conduzione del ponte
inverso; la normalizzazione é di 5V per il
100% di corrente. E’l’uscita di un
amplificatore operazionale con in serie una
resistenza da 100Ω.
-
29
+
100
0.01u
27
L
T
+5V
6,1K
30
DT2
J10
40K
P2
5K
Ingresso del segnale tachimetrico.
Si entra in 30 o in 31 a seconda del livello di
tensione (vedi procedura di messa in
servizio, pag.14 e tabelle pag.37).
31
DT1
32
0DT
MANUALE D'USO
Pagina 24 di 66
SERIE CTRD -CS6621-
REV.2.5 07/11/13
CN1/33
Ingresso riferimento
analogico
± 10V,
0 ÷ 20mA,
4 ÷ 20mA.
J11
+5V
33K5
10K
33
20K
J12
500
RF
Ingresso per il riferimento di velocità.
L' ingresso è ± 10V.
J12 aperto -> ± 10V
J12 chiuso -> ± 20mA o 0 ÷ 20mA
J11 e J12 chiusi -> 4 ÷ 20mA
+ / - 5V
+
10K
34
CN1/34
Comune 0v
CN1/35
Ingresso segnale
aggiuntivo
± 10V - 0,25 mA
34
0V
-
SA
35
+
0V della regolazione: fa da comune per gli
ingressi 33,35,36,37.
Ingreso analogico per il segnale di
riferimento aggiuntivo SA connesso con li
collegamento interno S4.
34
CN1/36
Ingresso segnale IPD
± 10V - 0,25 mA
-
IPD
36
Ingresso analogico per il segnale di limite del
ponte diretto o altro (vedi il collegamento
interno S7).
+
34
CN1/37
-
Ingresso segnale IPI
± 10V - 0,25 mA
IPI
37
Ingresso analogico per il segnale di limite del
ponte inverso o altro (vedi il collegamento
interno S7).
+
34
100
CN1/38/39/40
Tensioni di riferimento
±10V - 10mA
38
+10V
39
100
40
MANUALE D'USO
-10V
Pagina 25 di 66
Uscita
delle
tensioni
di
riferimento
±10V/10mA
ottenute
da
amplificatori
operazionali con in serie 100ohm. Possono
servire
come
alimentazione
dei
potenziometri di riferimento.
SERIE CTRD -CS6621-
REV.2.5 07/11/13
8. DIAGNOSTICA
8.1 Visualizzazioni
Molte sono le grandezze analogiche e logiche che possono essere visualizzate sul tastierino o
tramite linea seriale agevolando la diagnostica in caso di intervento dei relè , protezioni o di non
corretto funzionamento. Il rispettivo elenco dettagliato è riportato nel paragrafo 9.11, pag. 35.
8.2 Allarmi ed esclusioni
In presenza di un qualsiasi allarme l'azionamento va in blocco ed il segnale AZIONAMENTO
PRONTO diventa non attivo.
Quando l'azionamento è in una situazione di allarme il display lampeggia; si può vedere quali sono gli
allarmi scorrendo le indicazioni di allarme (Axx) e vedendo quali sono attive (H); quelle non attive
sono basse (L). Lista degli allarmi dettagliata par. 9.12, pag. 36.
9. DATI DISPONIBILI DA TASTIERINO
9.1 Descrizione funzionamento tastierino
Il tastierino dispone di tre tasti, 'S' (selezione), '-' (diminuisci), '+' (aumenta) e di un display a quattro cifre
e mezza più i punti decimali ed il segno '-'.
s
-
+
9.2 Situazione a riposo
All'accensione dell'apparecchiatura il tastierino visualizza la situazione di "Stop"; quando l'azionamento è
in una situazione di allarme, il display del tastierino lampeggia alternando la scritta “Stop” con la
visualizzazione del primo allarme intervenuto.
Il tastierino si riporta automaticamente nella situazione di riposo dopo dieci secondi dall'ultima manovra,
salvo non si sia nella condizione di display di una grandezza interna o di uno stato digitale.
9.3 Impostazione e lettura dei parametri e connessioni
Premere il pulsante 'S' , sul tastierino comparirà l'indirizzo dell'ultimo parametro o grandezza selezionata,
spostarsi coi tasti '+' e '-' nel menú fino a che si trova l'indirizzo del parametro (P) o della connessione (c)
che si vuole leggere ed eventualmente correggere. A lato del numero del parametro o connessione
compare la lettera 't' se riservato alla TDE MACNO e la lettera 'n' se il parametro è uno la cui modifica
richiede che l'azionamento non sia in marcia (offline).
Se si preme il tasto 'S' compare il valore del parametro che può cosi' essere letto; ripremendo 'S' si
ritorna al menú, per correggere il valore del “P” o della “c” una volta che si è entrati in visualizzazione
bisogna premere contemporaneamente i tasti '-' e '+' ; in quel momento si mette a lampeggiare il punto
decimale della prima cifra a sinistra avvertendo che da quel momento il movimento dei tasti '-' e '+'
modifica il valore impostato; la modifica del valore avviene solo da fermo se il parametro è offline e con
P80 = “valore chiave” per i parametri riservati TDE MACNO.
MANUALE D'USO
Pagina 26 di 66
SERIE CTRD -CS6621-
REV.2.5 07/11/13
I parametri e le connessioni riservati TDE MACNO non compaiono nella lista se non viene impostato il
codice di accesso P80.
Una volta corretto il valore se si preme il tasto 'S' si ritorna al menú utilizzando il parametro o la
connessione modificata; se si vuole uscire senza considerare la modifica basta attendere dieci secondi e
sul tastierino comparirà l'indirizzo senza che sia stato considerato il valore modificato; se non si tocca il
valore per uscire basta ripremere il tasto 'S' (verrà considerato lo stesso valore precedente). Una volta in
menu è sufficiente non fare niente perché il tastierino si porti nella situazione di riposo.
Se si vogliono salvare i nuovi valori impostati è necessario, prima di spegnere l’azionamento, effettuare la
connessione c76=1 vedi paragrafo xxx .
9.4 Visualizzazione delle grandezze interne
Dal menú ci si sposta con i tasti '+' o '-' fino a che compare l'indirizzo della grandezza da visualizzare
'dxx'; premendo 'S' scompare l'indirizzo e compare il valore.
Da tale stato si torna al menú solo ripremendo il tasto 'S', dal menú si torna automaticamente alla
situazione di riposo dopo un tempo pari a 10 secondi.
9.5 SALVATAGGIO E RIPRISTINO ALLARMI
All'accensione l'azionamento prende i parametri dalla memoria permanente (EEPROM) e li trasferisce
sulla memoria di lavoro (RAM). Tutte le modifiche che si fanno sugli stessi vengono fatte nella memoria di
lavoro (RAM); se si vuole che tali modifiche siano salvate sulla memoria permanente (EEPROM) si deve
attivare la connessione (C76 = 1).
Nel caso di allarme EEPROM (A2H) nella memoria di lavoro non si trovano i valori permanenti; per
ripristinare il sistema bisogna scrivere nuovi valori sulla memoria permanente e quindi ripristinare, per tale
scopo si usano i parametri di default, scritti nella memoria di sistema (EPROM), che vengono dapprima
trasferiti nella memoria di lavoro (C74=1) e poi vengono salvati nella memoria permanente (C76=1),
quindi si opera il ripristino che normalmente avviene salvo nel caso di guasto permanente.
Se dopo aver fatto delle modifiche nella memoria di lavoro (RAM) si volesse tornare ai parametri iniziali
che si trovano nella memoria permanente (EEPROM), senza spegnere e accendere è sufficiente attivare
la connessione (C75 = 1).
Le procedure sono esemplificate di seguito :
C74
C76
C75
N.B. I PARAMETRI CHE RAGGIUNGONO I VALORI SUPERIORI AL 19999 (ES: P20 IL FONDOSCALA
È 25000) VENGONO VISUALIZZATI CON IL SEGMENTO A FIANCO DEL SEGNO + ED IL
SEGMENTO DEL SEGNO - CHE SONO I SEGMENTI PRESENTI DELLA CIFRA 2.
POICHÉ I PARAMETRI DI DEFAULT SONO PARAMETRI STANDARD SICURAMENTE DIVERSI
DA QUELLI PERSONALIZZATI È OPPORTUNO CHE PER OGNI AZIONAMENTO DOPO
L'INSTALLAZIONE VENGA FATTA UNA COPIA ACCURATA DEI PARAMETRI DELLA MEMORIA
PERMANENTE IN MODO DA ESSERE IN GRADO DI RIPRODURLI SU UN EVENTUALE
AZIONAMENTO DI RICAMBIO, OD IN CASO DI RIPRISTINO DELLA MEMORIA CON I
PARAMETRI DI DEFAULT.
MANUALE D'USO
Pagina 27 di 66
SERIE CTRD -CS6621-
REV.2.5 07/11/13
9.6 DIAGRAMMA FUNZIONAMENTO TASTIERINO
SITUAZIONE RIPOSO
RUN
TORNA ALL'ULTIMA
STOP
SCELTA FATTA
PREMERE
SIMULTANEAMENTE
S
PARAMETRO NUMERO
−
1
+
n
P.XX.Y
VALORE
S
XXX
S
CORREZ.VALORE
+
−
• XXX
−
+
SALVA NUOVO VALORE
T=10s
S
T=10s
T=10s
ESCE DOPO 10sec. SENZA SALVARE
PREMERE
SIMULTANEAMENTE
CONNESSIONE NUMERO
−
1
n
+
c.XX.Y
VALORE
S
XXX
S
CORREZ.VALORE
+
−
• XXX
−
+
SALVA NUOVO VALORE
T=10s
S
T=10s
T=10s
ESCE DOPO 10sec. SENZA SALVARE
GRANDEZZA INTERNA
−
1
+
n
d.XX.Y
TABELLA RIASSUNTIVA DELLE GRANDEZZE VISIBILI SUL TASTIERINO
ALLARME
−
n
+
SIGLA
DESCRIZIONE
P.XX.Y
P=parametro
STATO
XX=numero
A.XX.Y
Y=eventuale indicazione di riservato (r), riservato TDE (t), off-line (n)
c.XX.Y
Y=eventuale indicazione di riservato (r), riservato TDE (t), off-line (n)
INGRESSO
−
+
n
C=connessioni
XX=numero
S
1
XXX
S
T=10s
1
VALORE
S
STATO
d.XX
d=display (sola visualizzazione)
XX=numero
i .XX.Y
A.XX.Y
A=allarmi
XX=numero
Y=valore (H=attivo, L=non attivo)
S
i.XX.Y
i=ingresso
XX=numero
USCITA
−
1
n
+
Y=valore (H=attivo, L=non attivo)
STATO
o.XX.Y
o .XX.Y
o=uscita
XX=numero
Y=valore (H=attivo, L=non attivo)
X.XXXX
S
MANUALE D'USO
puntino lampeggiante: valore del parametro o della connessione
che possono essere modificati con ‘ + ‘ ‘ − ‘
Pagina 28 di 66
SERIE CTRD -CS6621-
REV.2.5 07/11/13
9.7 Parametri
Note: offline = n, riservati = t
Par. Descrizione
P1
Numero azionamento
(per collegamento in multidrop)
P2
Codice per baud rate
(9600, 38400, 57600, 115200)
P3
Velocitá Jog Cw
P4
Velocitá Jog CCW
P5
Coefficente di correzione assoluta per segnale aggiuntivo
P6
Coefficente di correzione proporzionale alla velocitá per
segnale aggiuntivo
P7
Coefficente di correzione per ingresso segnale riferimento
P8
Coefficente di correzione per segnale IPD
P9
Coefficente di correzione per segnale IPI
P10 Coefficente di correzione per riferimento finale
(dopo rampa)
P11 Tempo di accelerazione CW
P12 Tempo di decelerazione CW
P13 Tempo di arrotondamento iniziale CW
P14 Tempo di arrotondamento finale CW
P15 Tempo di accelerazione CCW
P16 Tempo di decelerazione CCW
P17 Tempo di arrotondamento iniziale CCW
P18 Tempo di arrotondamento finale CCW
P19 Disponibile
P20 Frequenza massima encoder (/2)
P21 Limite di velocitá max CW
P22 Limite di velocitá max CCW
P23 Guadagno proporzionale del regolatore di velocitá
P24 Tempo della costante di anticipo del “
“
P25 Coefficiente adattamento guadagno in zona a potenza
costante
P26 Coefficiente per la caduta statica del reg. di velocitá
P27 Valore iniziale di partenza dell'integrale del regolatore
velocità
P28 Disponibile
P29 Limite massimo di corrente del ponte diretto
P30 Limite massimo di corrente del ponte inverso
P31 Corrente nominale del motore
P32 Disponibile
P33 Corrente ammessa sul motore (di/dt)
P34 Corrente di campo nominale
P35 Tensione motore in zona a potenza costante
(% di P38)
P36 Livello max di tensione motore (% di P38)
(150% esclude controllo)
P37 Rapporto fra giri inizio diseccitazione e giri massimi
P38 Tensione del motore riferita alla rete ai giri nominali
P39 Caduta resistiva in % del motore alla corrente nominale
riferita alla tensione nominale
P40 Costante di tempo di armatura
P41 Coefficiente inversamente proporzionale al guadagno dell'
anello di corrente
MANUALE D'USO
Pagina 29 di 66
Range
1÷120
Default
255
Note
n
0÷3
0
n
±100.0 (%Vmax)
±100.0 (%Vmax)
±400.0 (%)
±400.0 (%)
0.0
0.0
0.0
0.0
±400.0 (%)
±400.0 (%)
±400.0 (%)
±400.0 (%)
100.0
100.0
100.0
100.0
0.5÷900.0 sec
0.5÷900.0 sec
0.0÷10.0 sec
0.0÷10.0 sec
0.5÷900.0 sec
0.5÷900.0 sec
0.0÷10.0 sec
0.0÷10.0 sec
10.0
10.0
1.0
1.0
10.0
10.0
1.0
1.0
n
n
n
n
n
n
3000÷25000
0.0÷100.0 (%Vmax)
0.0÷100.0 (%Vmax)
1.0÷100.0
30.0÷1000.0 (ms)
0.0÷100.0
10000
100.0
100.0
4.0
150.0
100.0
n
0.0÷10.0 (%)
±100.0 (%max)
0.0
0.0
n
0.0÷100.0 (%Imax)
0.0÷100.0 (%Imax)
20.÷100.0 (%Imax)
100.0
100.0
66.7
n
10.0÷300.0 (In/sec.)
30.0÷100.0 (%)
40.0÷120.0 (%)
150.0
90.0
100.0
n
n
n
50.0÷150.0 (%)
120.0
n
10.0÷100.0 (%)
20.0÷125.0
2.0÷40.0(%)
100.0
105.0
7.0
n
n
n
3.0÷200.0 (ms)
2.0÷100.0
10.0
20.0
n
n
n
SERIE CTRD -CS6621-
REV.2.5 07/11/13
P42
P43
P44
P45
P46
P47
P48
P49
P50
P51
P52
P53
P54
P55
P56
P57
P58
P59
P60
P61
⇓
P79
P80
Coeff. di rapporto tra guadagno integrale e proporzionale
dell' anello di corrente
Caduta % di linea per I=0.82In
(corrente nominale in alternata)
Costante termica Th del motore
(P44 = 2400.0 escl. controllo)
Corrente termica del motore per preallarme
Tempo attesa per chiusura contattore
Taratura livello della minima velocitá
Corrente termica del motore per allarme
Livello massimo di tensione ammesso sulla rete
Livello minimo di tensione ammesso sulla rete
Velocitá max. ammessa (>112.5% esclude controllo)
Ritardo massimo per allarmi ritardati
Corrente nominale azionamento
(P53=100% esclude controllo)
Tempo preallarme termico azionamento (I=1.5*In)
Tempo allarme termico azionamento (% di P54)
Offset canale reazione di velocitá
Offset canale riferimento di velocitá
Offset canale segnale di correzione
Offset canale segnale IPD
Offset canale segnale IPI
Disponibili
0.0÷100.0
20.0
n
2.0÷20.0 (%)
6.0
n
2.0÷2400.0 (sec.)
180.0
n
20.0÷100.0 %
50.0÷2000.0 (ms)
0.0÷100.0 (%Vmax)
20.0÷100.0 (%)
105.0÷130.0 (%)
50.0÷-95.0 (%)
0.0÷115.0 (%)
0.1÷3000.0 (sec)
20.0÷100.0
(%Imax)
10.0÷200.0 (sec)
100.0÷400.0 (%)
±4095 (±100%)
±4095 (±100%)
±4095 (±100%)
±4095 (±100%)
±4095 (±100%)
66.7
250.0
1.0
70.0
115.0
85.0
110.0
60.0
66.7
n
n
30.0
133.0
0.0
0.0
0.0
0.0
0.0
n
n
t
Chiave accesso parametri riservati
0÷32000
92
t
Range
0.0÷3200.0
0.0÷3200.0
0.0÷3200.0
default Note
1500.0
50.0
380.0
n
n
n
9.8 Parametri per la visualizzazione assoluta
Par.
P81
P82
P83
P84
⇓
P89
Descrizione
Velocitá max. del motore per visualizzazione n/1'
Valore della corrente limite del ponte (A)
Valore tensione nom. della rete (Veff)
Disponibili
9.9 Parametri riservati
Par. Descrizione
Range
P90 Livello controllo conduzione
0.0÷200.0 (%Imax)
(200% esclude controllo)
P91 Guadagno cor rezione regolatore di corrente
0.0÷8.0
P92 Correzione offset F.E.M.
1.0÷10.0 (%)
P93 Soglia di corrente per controllo tachimetrica (100% esclude 0.0÷100.0 (%)
controllo)
P94 Soglia di zero dinamo tachimetrica
0.0÷5.0 (%)
P95 Soglia FEM per avere DT >soglia
1.0÷100.0 (%)
P96 Valore cresta per max corrente
100.0÷200.0 (%)
(200% esclude controllo)
P97 Durata impulso accensione (ms)
0.1÷10.0 (ms)
P98 Tempo attesa dopo inversione (ms)
1.5÷30.0 (ms)
P99 Soglia di corrente equivalente a zero
0.2÷3.0 (%)
MANUALE D'USO
Pagina 30 di 66
default Note
19.9
t
0.0
3.7
2.0
t
t
t
2.0
20.0
100.0
t
t
t
1.6
2.0
0.6
t
t
t
SERIE CTRD -CS6621-
REV.2.5 07/11/13
9.10 Collegamenti interni (IN GRASSETTO CONFIGURAZIONE DI DEFAULT)
SW
C1
C2
C3
C4
C5
C6
C7
C8
C9
C10
C11
C12
C13
C14
C15
C16
C17
C18
C19
C20
C21
C22
Descrizione
RANGE
Determina quale dei segnali interni viene posto sull’uscita 1 ÷ 19 (18)
analogica CN1-26 (PWM)
0 = tutto
Determina cosa si usa nello stadio di velocitá
1 = solo proporzionale
2 = rif. stadio corrente
3 = bloccato
Determina se JOG CW e JOG CCW vanno prima o dopo 0 = jcw prima jccw prima
rampa
1 = jcw dopo jccw prima
2 = jcw prima jccw dopo
3 = jcw dopo jccw dopo
Determina se il segnale aggiuntivo va prima della rampa, 0 = dopo rampa
dopo la rampa o dopo stadio di velocitá
1 = prima rampa
2 = dopo stadio di velocitá
Determina se le visualizzazioni sono in percentuale o in 0 = visualizza in %
valori assoluti
1 = visualizza in assoluto
Determina se si lavora con O3 = minima velocitá oppure 0 = minima velocitá
1 = azionamento in marcia
O3 = azionamento in marcia
Determina se si lavora con il ponte diretto e/o inverso in 0 = I7 L_PD I8 L_PI
limite esterno, in limite interno o in somma. Deve essere in 1 = I7 somma I8 L_PD,L_PI
combinazione con I7, I8. (con I7, I8 = 0 si lavora solo con 2 = I7 tiro PD, I8 L_PI
limiti interni P29, P30)
3 = I7 L_PD, I8 tiro PI
4 = I7 tiro PD, I8 tiro PI
0 = due ponti (bidirez.)
Determina tipo di convertitore
1 = solo ponte diretto
2 = solo ponte inverso
3 = unidir. invers. campo
4 = bidirez. invers. campo
0 = nessuno escluso
Esclusione allarmi offline
1 = escluso manc. Campo
Esclusione allarme senso ciclico e allarmi frequenza e fase 0 = nessuno escluso
1 = escluso senso ciclico
2 = esclusi freq. e fase
3 = esclusi senso ciclico
frequenza e fase
1 ÷ 20 (6)
Scelta grandezza (1) per stato azionamento
1 ÷ 20 (11)
Scelta grandezza (2) per stato azionamento
1 ÷ 20 (5)
Scelta grandezza (3) per stato azionamento
1 ÷ 20 (10)
Scelta grandezza (4) per stato azionamento
0 = non valida
Validitá impostazione multipla switch
1 = valida
Scelta parametro (1) per impostazione multipla
1 ÷ 99
(0 = nessun parametro)
Scelta parametro (2) per impostazione multipla
1 ÷ 99
(0 = nessun parametro)
Scelta parametro (3) per impostazione multipla
1 ÷ 99
(0 = nessun parametro)
Scelta parametro (4) per impostazione multipla
1 ÷ 99
(0 = nessun parametro)
0 = off 1 = on
On/off terminalino passivo
0 = off 1 = on
Marcia software
(in parallelo con XMARCIA)
0 = off 1 = on
Abil. segnale CW
(in parallelo con XS_CW)
MANUALE D'USO
Pagina 31 di 66
Note
n
n
n
n
n
n
n
SERIE CTRD -CS6621-
REV.2.5 07/11/13
C23
C24
C25
C26
C27
C28
C29
C30
C31
C32
C33
C34
C35
C36
C37
C38
C39
C40
C41
C42
C43
C44
C45
C46
C47
C48
C49
C50
C51
C52
C53
C54
C55
C56
C57
C58
C59
C60
C61
C62
C63
C64
C65
C66
C67
Abil. segnale CCW
(in parallelo con XS_CCW)
Abil. segnale JOG CW
(in parallelo con XJOGCW)
Abil. segnale JOG CCW
(in parallelo con XJOGCCW)
Esclusione rampa
(in parallelo con XRAMPA_E)
Abilitazione limite ponte diretto
(in parallelo con XAB_LIM_PD)
Abil. limite ponte inverso
(in parallelo con XAB_LIM_PI)
Abil. segnale aggiuntivo
(in parallelo con XA_S_AGG)
Reset allarmi
(in parallelo con XRIP_ALL)
Abilitazione marcia con ritardo
(in serie con XAB_MR)
Servizio 1
(in serie con XSERV1)
Riservato
consenso presenza eccitaz.
(in parallelo con XMECC)
riservato
riservato
Significato ingresso IPR1
Significato ingresso IPR2
Riservato
Riservato
Bit in parallelo con I_FUN1
Bit in parallelo con I_FUN2
Bit in parallelo con I_FUN3
Bit in serie con I_FUN4
Riservato
Riservato
Riservato
Riservato
Riservato
Riservato
Riservato
Riservato
Riservato
Riservato
Riservato
Riservato
Significato uscita OPR1
Significato uscita OPR2
Riservato
Riservato
Scelta per x2/4 (0 = x2, 1 = x4)
Abilitazione task profibus dati di processo
Riservato
Riservato
Riservato
Riservato
Riservato
MANUALE D'USO
Pagina 32 di 66
0 = off 1 = on
0 = off 1 = on
0 = off 1 = on
0 = off 1 = on
0 = off 1 = on
0 = off 1 = on
0 = off 1 = on
0 = off 1 = on
0 = off 1 = on
0 = off 1 = on
0 = off 1 = on
0 ÷ 5 (0)
0 ÷ 5 (1)
0 = off
0 = off
0 = off
0 = off
n
n
1 = on
1 = on
1 = on
1 = on
0 ÷ 2 (0)
0 ÷ 2 (1)
n
n
0 = off 1 = on
0 = off 1 = on
n
n
SERIE CTRD -CS6621-
REV.2.5 07/11/13
C68
C69
C70
C71
C72
C73
C74
C75
C76
C77
C78
C79
C80
Riservato
Riservato
Riservato
Autotaratura anello di corrente
Riservato
Riservato
Ripristino valori di default
Ripristino valori eeprom
Scrittura eeprom
Autotaratura offset conv. esterno
Riservato
Riservato
Riservato
0 = off
0 = off
0 = off
0 = off
0 = off
0 = off
0 = off
1 = on
1 = on
1 = on
1 = on
1 = on
1 = on
1 = on
n
n
n
n
n
9.11 Visualizzazioni
D
D0
D1
D2
D3
D4
D5
D6
D7
D8
D9
D10
D11
D12
D13
D14
D15
D16
D17
D18
D19
D20
D21
D22
D23
Descrizione
Versione EPROM scheda
Rif.velocitá esterno
Segnale aggiuntivo prima dell'adattamento
Segnale aggiuntivo dopo dell'adattamento
Riferimento di velocitá dopo la rampa
Riferimento totale di velocitá
Reazione di velocitá(filtr. 100 ms)
Riferimento di veloc. prima della rampa
Parte integrale
Somma segn. Aggiuntivo + correzione
Richiesta di corrente (out regolatore)
Richiesta corrente sul ponte corretta
Limite finale ponte diretto
Limite finale ponte inverso
Frequenza di rete
Segnale esterno IPD
Segnale esterno IPI
Tensione della rete
Forza E.M. motore riferita alla rete
Tensione motore riferita alla rete
Reazione di velocitá (media 10 ms)
Riservato
Riservato
Riservato
MANUALE D'USO
Pagina 33 di 66
Visualizzazione
PWM
(%)
(%)
(%)
(%)
(%)
(%)
(%)
(%)
(%)
(%)
PWM
PWM
Note
PWM
PWM
(%)
(%)
(Hz)
(%)
(%)
(%)
(%)
(%)
(%)
SERIE CTRD -CS6621-
REV.2.5 07/11/13
9.12 Allarmi
A
A1
A2
A3
A4
A5
A6
A7
A8
A9
A10
A11
A12
A13
A14
A15
A16
Descrizione
Allarme microprocessore fault
Errori in eeprom o ram
Senso ciclico errato
Mancanza fase
Tensione rete errata
Alimentazioni interne errate
Picco corrente elevato
Allarme mancata conduzione
Errore retroazione di velocità
Sovravelocità motore
Termico motore
Oscillazioni della corrente durante l’autotaratura
Autotaratura della corrente impossibile
Allarme sugli ingressi
Frequenza di lavoro errata
Tensione motore errata
9.13 Ingressi
I
I1
I2
I3
I4
I5
I6
I7
I8
I9
I10
I11
I12
Descrizione
marcia
selezione avanti
selezione indietro
jog avanti
jog indietro
rampa esclusa
abilitazione corrente ponte diretto
abilitazione corrente ponte inverso
abilitazione segnale aggiuntivo
ripristino allarmi
abilitazione marcia ritardata
consenso esterno
9.14 Uscite
O
O1
O2
O3
O4
O5
O6
O7
O8
Descrizione
Pronto Marcia
Fine rampa
Azionamento in marcia/min. velocità
Protezione esterne
Controllo alimentazioni
Controllo corrente
Controllo tachimetrica
Termico motore
MANUALE D'USO
Pagina 34 di 66
SERIE CTRD -CS6621-
REV.2.5 07/11/13
10. TARATURE E IMPOSTAZIONI
10.1 Adattamento col motore
P29
P30
P31
P53
P54
P55
Impostare o verificare:
Limite massimo di corrente del ponte diretto
Limite massimo di corrente del ponte inverso
Rapporto tra corrente nominale motore e nominale azionamento
Corrente nominale azionamento (86.9%)
Tempo preallarme termico azionamento (10sec.)
Tempo allarme termico azionamento (% di P54) (133.0)
NOTA: se specificato nell’ordine, il convertitore è già pretarato per il motore a cui è abbinato.
10.2 Impostazioni dei riferimenti e dei limiti di velocità
La velocità massima va tarata in combinazione con J10 ed il trimmer P3, leggendo la grandezza D6 con
J10 in posizione T, come indicato dalla tabelle sottostanti:
L
5-20v
40-120v
DT1
DT2
L
T
500/VDT1 %
3630/VDT1 %
T
L
10-40v
50-180v
T
L
T
967/VDT1 %
4100/VDT1 %
La velocità sarà pari al ±100.0% dei riferimenti interni ed a ±10V del riferimento analogico, quest’ultimo può
essere eventualmente corretto tramite il parametro P7.
10.3 impostazioni livello uscita minima velocità
L' uscita O3 (CN1-15) può essere configurata come segnalazione di superamento di minima velocità
tramite la connessione C6 = 1 (default = 0, azionamento in marcia), portandosi a +24v quando si supera il
livello d’intervento programmato in P47 (default 1%).
VELOCITA' (D4)
V
MINIMA VELOCITA'
V
V <=P47
P47
V min
MIN
VELOCITA' O3
MASSIMA VELOCITA'
V > P51
P51 V max
O3=L
MAX
VELOCITA'
A10H
A10
L’allarme di sovravelocità (A10H) interviene quando la reazione di velocità supera il livello programmato in
P51 (default 110.0%).
MANUALE D'USO
Pagina 35 di 66
SERIE CTRD -CS6621-
REV.2.5 07/11/13
10.4 Impostazioni valori di limite e di picco
I parametri P29, P30 impostano il valore massimo ammesso per la corrente efficace di picco erogabile dall’
azionamento, essi sono espressi in percentuale del valore limite tipico della taglia (1.15% Inom), esempio:
se In azionamento è 50Amp (57.5Amp Imax), In motore è 40Amp e si vuole limitare la corrente massima
erogabile ad un valore non superiore a 1.2 In motore (48Amp) si deve impostare:
P29=P30=48/57.5∗100=83.4%
Il rapporto tra il limite del convertitore e la taglia del motore è determinato dal parametro P31, mantenedo i
valori precedenti:
P31=40/57.5∗100=69.5%
10.5 Comando autotaratura anello di corrente
Esistono due parametri P41 e P42. Il loro valore è prefissato e sulla base di tali valori, il sistema in fase di
autotaratura fissa il guadagno proporzionale ed integrale dell’anello di corrente.
Facendo riferimento allo schema tradizionale:
Ci
R
Ri
I RIF.
R
-IR.
IO
+
R
dove: ΙRIF = segnale di riferimento
-ΙR. = segnale retroazione
si può scrivere:
I valori di P41 an P42 sono legati all'equazione sopra scritta dalle seguenti relazioni:
da cui si vede che aumentare il P41 equivale a rallentare l'anello di corrente sia nel guadagno integrale che
proporzionale, mentre aumentare il P42 equivale ad aumentare il guadagno integrale (come ridurre la sola
capacità).
Il sistema lega automaticamente tali parametri alle caratteristiche del motore, calcolando in autotaratura.
Kautotar ; conviene in ogni caso non toccare P41 e P42.
MANUALE D'USO
Pagina 36 di 66
SERIE CTRD -CS6621-
MANUALE D'USO
Pagina 37 di 66
PAG.2
TS
SS
RS
%
3630
VDT1
ORF
SA
IPD
IPI
34
35
36
37
I
~
PAG.1
=
J11
J6
R1
4100
VDT1
-
967
VDT1
R2
LIM
R3
=
%
J12
%
J5
23-24
CN2
25-26
-I
VR
IM
0S
+I
+2V
PAG.1
+5V
DT
2.5 RAPP.TA
RI1//RI2
(+/- 10V 0.25mA)
(+/- 10V 0.25mA)
I
T
50-180V
53K
(+/- 10V 0.25mA)
LETTURA
TENSIONE
RETE
TV
+VR
RF+
33
J10
J4
10-40V
12.6K
+
(0-20mA 10V)
%
T
500
VDT1
(+/- 10V 0.33mA)
L
INGRESSO TA PER
LETTURA CORRENTE
CS905
TA4
TA3
TA2
TA1
40-120V
47K
DT2
T
5-20V
6.5K
L
DT1
J10
J4
VALORI INGRESSO DT
*DT
L
P2
TDT
J10 J3 IN POS. T
LETTURE IN V6 CON
32
DT1
31
INGRESSI ANALOGICI
DT2
CN1
30
D
A
-
-
-
-
P60
OFFSET
+
P59
OFFSET
+
P58
OFFSET
+
P57
OFFSET
+
P56
OFFSET
+
V17
VR
IM
V16
IPI
V15
IPD
V2
SA
V6
P6
+
P9
P8
I8
I7
P5
E1
PAG.1
PAG.1
V11
DT
I
P3
+
+
S3=0-2
V7
+
+
-
+
S3=0-1
S7=1
S7=0,2,3,4
S7=1
S4=2
S4=0
V3
+
S3=1-3
(PG.4)
S4=1
C4
JOGCW
PD
+/- 10V 100
2mA
USCITE ANALOGICHE DIRETTE
(PG.3)
(PG.4)
(PG.3)
C6
KASS.
CORRENTE MEDIA
COEFF.
CORRETIVO
+
C3
(PG.4)
OFFSET
VELOCITA'
(PG.4)
C2
COEFF.
CORRETIVO
V1
KP
RF
DT
+
0/- 5V 100
2mA
+
Tacc
Tarrj
TACC
TDEC
TARRI
TARRF
JOGCCW
-I
DT0
29
28
CN1
I6
Tarrf
CW
P11
P12
P13
P14
RAMPA
P4
CCW
P16
P17
P18
P19
Tdec
-
C5
V4
S3=2-3
(PG.4)
+
+
+ +
V9
P26
WMAX CCW
CADUTA
STATICA
-
VMAX CW
IRIF
V5
n5
I
VR
LIMP I
LIM PD
I AGG.
P22
VRIF
P21
DT
PG.2
PG.2-4
PG.2
PG.2
PG.2
PG.2
PG.2
PG.2-4
REV.2.5 07/11/13
11. SCHEMA A BLOCCHI DELLA REGOLAZIONE
SERIE CTRD -CS6621-
MANUALE D'USO
I AGG.
LIM PD
PG.1
PG.1
Pagina 38 di 66
SERIE CTRD -CS6621-
SS
4
23/25/26
-18
19
+24I
0PI
+VA
+8I
0DG
+8E
0DGE
CS
TS
3
RS
2
1
IMAX PI
DI
DT
P33
P30
S2=0-1
LIM
P29
OFFSET
CURRENT
IMAX PD
P23
PG.1
S2=2
KPV
18
15/17
13/14/16
20/21/22/24
+
-
CN3
5/6/7/8
9/10/11/12
LIMP PI
VRIF
PG.1
PG.1
DT
PG.1
SPEED REGULATION
+
+
+
V13
LIM PI
+
+VRIF
0VS
-VRF
-VS
+24I
0VDE
LIM PD
V12
FOR ANALOG AND LOGIC CIRCUIT
FLYBACK FEEDING
+VDE
FEEDING
SERIAL PORT
~
>
<
P24
P27
V8
SYNC.GENERATOR
+VS
E2
KIV
VAL.IN.
INTEGRAL
S2=1-2-3
0PI
PG.1
n10
V10
VR
I
IRF
V14
P43
P42
P41
P40
S8=0
S8=1
S8=2
BIDIRECTIONAL
UNIDIRECTIONAL PD
UNIDIRECTIONAL PI
CONVERTER`S TYPE
MAIN VOLTAGE
V17
V18
MOTOR EMF REFERRED TO NETWORK
n18
V19
MOTOR VOLTAGE
n19
NETWORK FREQUENCY
DISPLAY
% VOLTAGE DROP
KII
KC
L/R
P39
P38
VM/Eon
R IN/VM
P31
In/IL
PARAMETERS
CURRENT REGULATOR
TYPE P.I. WITH MODEL
PD
PI
T-
T+
S-
S+
R-
R+
+VP
+VP
0PI
+24I
-VRIF
0VS
-10V 10mA 10R
0S
+10V 10mA 10R
0P
24V 0.25A
OUTPUS POWER SUPPLIES
+VRIF
PD
PI
40
39
38
24
23
CN1
15-17-18
13-14-16
11-12
9-10
7-8
5-6
3-4
1-2
CN2
REV.2.5 07/11/13
MANUALE D'USO
PG.3
I10
I11=ABMR
I
PG.3
PG.1
Pagina 39 di 66
RESET
P.Tach.
P.Corr.
P.Alim.
P.Est.
P.Int.
I1= RUN
PG.3
P51
R
I=0
P46
T
DT>Vm
MEMORY
ALARM
DT
PG.1
1=CCURRENT=0
1=SPEED > MINIMUN
PG.3
I9 = ABSA
I5 = JOG CCW
I4 = JOG CW
I3 = AB CCW
I2 = AB CW
0=IMPULSE STOP
INTERNAL LOGIC
S6=1
S6=0
READY TO RUN
SA
J CCW
J CW
CCW
CW
O1 PG.3
C6 PG.1
C5 PG.1
C4 PG.1
C3 PG.1
C2 PG.1
CURRENT REGULATOR ENABLING
SPEED REGULATOR ENABLING
RUN DRIVE
SPEED MIN.
O3 PG.3
REV.2.5 07/11/13
SERIE CTRD -CS6621-
REV.2.5 07/11/13
INPUTS ON / OFF
CN1
pin
1
24V 5mA
2
24V 5mA
3
24V 5mA
4
24V 5mA
5
24V 5mA
6
24V 5mA
7
24V 5mA
8
24V 5mA
9
24V 5mA
10
24V 5mA
11
24V 5mA
12
24V 5mA
SEGNALE
LED
Marcia
L24
Abilitazione CW
L25
Abilitazione CCW
L26
JOG CW
L27
JOG CCW
L28
Rampa esclusa
L29
Abilitazione IPD
L30
Abilitazione IPI
L31
Abiltazione segn. aggiuntivo
L32
Reset allarmi
L33
Abilitazione marcia con ritardo
L34
Abilitazione esterna
L35
CN2
pin
21
SEGNALE
LED
24V 5mA
Protezione termica
L3
19
24V 5mA
Mancanza eccitazione
L4
CN1
pin
21
0C
C
22
+24C
+V
VISUALIZZAZIONI INTERNE
Allarme ram-eeprom
L5
Ricambio
L6
Trasmettitore termico
L7
Segnale tempo
L8
Abilitazione RS485
L9
Trasmettitore RS485
L10
Ciclo
L11
Sincronismo
L12
n
5
6
10
18
19
term. uscite analogiche
velocitá di riferimento
velocitá di feedback
corrente
E.M.F
tensione motore
valore corrente a 10V
100% Vmax
100% Vmax
100% I lim
141% Vrete
141% Vrete
OUTPUTS ON / OFF
MANUALE D'USO
Pagina 40 di 66
SERIE CTRD -CS6621-
REV.2.5 07/11/13
+V
LED
24V 80mA
CN1
pin
13
24V 80mA
14
24V 80mA
15
24V 80mA
16
24V 80mA
17
24V 80mA
18
24V 80mA
19
24V 80mA
20
SEGNALE
L16
Pronto marcia
L17
Fine della rampa
L18
S6 = 0 ≥ Minim. velocitá
S6 = 1 comando marcia
L19
Protezione esterna
L20
Allarme rete e alim.
monitoraggio
L21
Monitoraggio corrente
L22
Controllo velocitá
feedback
L23
Termico
Uscite
analogiche
D/A
25
± 10V 2mA
D/A
26
± 10V 2mA
27
MANUALE D'USO
Pagina 41 di 66
SERIE CTRD -CS6621-
REV.2.5 07/11/13
11.1 Riferimenti di velocità e rampa
Sono possibili tre riferimenti di velocità , uno analogico e due digitali.
Il riferimento analogico, ±10V per la massima velocità, viene applicato al morsetto 33 del connettore CN1, il
verso di rotazione del motore poi dipenderà dall’abilitazione di CN1-2 o CN1-3, se il segnale presenta un
offset può essere compensato tramite il parametro P57 il cui valore di risoluzione ±4095 bit (100% del fondo
scala).
Se la massima velocità deve essere raggiunta con un valore di tensione di riferimento esterno diverso da
±10V, si può impostare il coefficiente di correzione al parametro P07 (default 100%); si deve però tenere
presente che questa operazione riduce la risoluzione del riferimento.
I due riferimenti digitali sono impostabili ai parametri P03, P04, con fondo scala ±100.0% per la massima
velocità.
rif. Analogico CW
rif. Analogico CCW
JOG-CW
JOG-CCW
CN1-2
H
L
L
L
CN1-3
L
H
L
L
CN1-4
L
L
H
L
CN1-5
L
L
L
H
11.2 Limitazione di velocità e stadio rampa con arrotondamenti
I parametri P21 e P22 servono a limitare il massimo riferimento nei due sensi di marcia, e sono
programmabili nel range 0÷100.0%; è da tenere presente che essendo la regolazione di tipo digitale, in
nessun caso si supera il limite massimo impostato in P21 e P22 .
La rampa sul riferimento di velocità e relativi arrotondamenti, sono sempre inseriti altrimenti possono
essere esclusi abilitando l’ingresso CN1-6.
I tempi di Acc. CW, Dec. CW, Acc. CCW, Dec. CCW, per andare da velocità da 0 a Vmax sono impostabili
direttamente in secondi ai parametri P11, P12, P15, P16, gli arrotondamenti si impostano ai parametri P13,
P14, P17, P18.
11.3 Regolatore di velocità e limiti di corrente
Il regolatore di velocità riceve il riferimento dal blocco riferimento mentre ricava la velocità dalla dinamo
tachimetrica connessa all'albero del motore.
La massima velocità dipende dalla taratura del trimmer P2 e dal J10. Si può avere una immagine della
velocità con fondo scala ±10V all'uscita analogica CN1-28.
È di tipo PI (PROPORZIONALE-INTEGRALE) con un filtro del primo ordine sull`errore. Vi è la possibilità di
impostare in maniera separata ed indipendente il guadagno proporzionale Kp, la costante di anticipo Ta
(pari al tempo di integrazione moltiplicata per Kp ).
In pratica il regolatore di velocità agisce con le costanti calcolate secondo le seguenti equazioni, facendo
quindi riferimento allo schema tradizionale:
Cv
R
Rv
V REF.
R
-DT
VO
+
R
dove : Vref = segnale di riferimento
-DT = feedback dinamo tachimetrica
MANUALE D'USO
Pagina 42 di 66
SERIE CTRD -CS6621-
REV.2.5 07/11/13
si può scrivere:
VO
R
R
1
1
1
= v+
= v (1 +
) = K P (1 +
)
Vref . − DT R s ⋅ Cv ⋅ R R
s ⋅ Cv ⋅ Rv
s ⋅ Cv ⋅ Rv
I due parametri P23 e P24 sono legati all'equazione sopra scritta dalle relazioni:
P 23 = K P
P 24 = Cv Rv ( mS )
da cui si vede che modificare il P23 equivale a cambiare il guadagno di tutto il sistema in maniera
direttamente proporzionale, mentre aumentare il P24 equivale a rallentare il guadagno integrale ma
aumentare il margine di fase.
L`azione integrale del regolatore di velocità, che si può vedere nella grandezza analogica D8, può essere
esclusa impostando la connessione c2=1 (default c2=0 integrale inserito).
Il valore iniziale dell'integratore del regolatore di velocità può essere impostato al parametro P27 (scala
±100.0%). Stabilisce il valore iniziale di corrente del regolatore di velocità, nel momento in cui si mette in
marcia l’azionamento. Può essere utile per partenze contro freno o in presenza di carichi sbilanciati, dove
sia necessario mettersi subito in fase di recupero
11.4 Protezione termica motore
Il circuito di calcolo del preallarme termico motore interviene se il valore quadratico medio della corrente
assorbita (calcolato sul valore medio della corrente nell’ambito di T/6 e quindi senza tenere conto del ripple
della corrente stessa!) supera il valore termico impostato “P45” tenendo conto della costante termica del
motore “P44”. Non provoca l’arresto dell’azionamento, ma porta a livello alto l’uscita CN1-20 (O8); non è
memorizzato e quindi l’intervento rientra quando il valore scende sotto la soglia.
L'intervento del circuito provoca l'arresto immediato intervenendo se il valore calcolato come sopra supera
P48. È memorizzato e provoca l’arresto immediato dell’azionamento; deve essere ripristinato. Il ripristino
viene accettato solo se il valore calcolato è sceso sotto P48; perciò se non si vuole aspettare, bisogna
spegnere l’azionamento.
MANUALE D'USO
Pagina 43 di 66
SERIE CTRD -CS6621-
REV.2.5 07/11/13
12. TERMINALE OPERATORE
FUNZIONI DEL
TASTIERINO
−
+
E
S
Attesa valori
S
visualizzazioni
S
Parametri
Stato ingressi
Stato uscite
Allarmi
Grandezze interne
Colleg. interni
impostazioni
S
P
I
O
A
V
S
MANUALE D'USO
Parametri
Colleg. interni
P
S
simulazioni
autotarature
memorizzazioni
S
S
S
Riferimenti (offset)
Pagina 44 di 66
E
Anello di corrente
Offset input analogici
Salvo parametri
su EEPROM
Ripristino
paramametri
da Eeprom
Ripristino parametri
default
SERIE CTRD -CS6621-
REV.2.5 07/11/13
12.1 Descrizione dei tasti e loro funzionalità:
I tasti per la comunicazione con la scheda regolazione sono:
+
−
E
S
per aumentare
per diminuire
per uscire e ritornare al livello precedente
per entrare, selezionare e confermare
Appena si alimenta la scheda di regolazione, il display indica la versione del software attualmente usato e
subito dopo si posiziona in “Attesa Valori”, dove visualizza una grandezza interna fra V06 – V11 – V19.
Premendo il tasto S si entra in comunicazione con il convertitore e il menù visualizzato è:
“VISUALIZZAZIONI”.
A questo punto premendo i tasti + e/o − è possibile passare agli altri menù principali: Impostazioni,
SIMULAZIONI, AUTOTARATURE e MEMORIZZAZIONI. Una volta scelto il menù è possibile entrare
premendo ancora il tasto S e poi scorrere i vari sottomenù premendo i tasti + e/o − .
Dopo aver scelto il sottomenù è possibile entrare nuovamente premendo il tasto S e passare quindi alla
visualizzazione delle grandezze o dei parametri specifici premendo ancora + e/o -.
12.2 Menù principali:
I menù principali sono:
VISUALIZZAZIONI:
per visualizzare lo stato degli ingressi, uscite, allarmi, parametri, grandezze interne.
IMPOSTAZIONI:
per modificare i parametri P e S.
SIMULAZIONI:
per simulare riferimenti di velocità o riferimenti di corrente.
AUTOTARATURE:
per eseguire l’autotaratura dell’anello di corrente e degli offset analogici.
MEMORIZZAZIONI: per memorizzare i parametri, ripristinare i parametri di Default o da eeprom, ecc.
12.2.1 VISUALIZZAZIONI:
Il menù visualizzazioni è composto dai seguenti sottomenù:
Visualizzazione parametri:
si visualizzano i parametri P.
Stato ingressi:
è indicato lo stato (on, off) di tutti gli ingressi della scheda di regolazione
del convertitore. E’ indicato lo stato ON se ai morsetti relativi è applicato lo
sblocco 24 Vdc.
Stato uscite:
è indicato lo stato (on, off) di tutte le uscite della scheda di regolazione.
Stato ON se è presente in uscita un 24Vdc.
è indicato l’allarme o più allarmi intervenuti. Se non ci sono allarmi sul
display appare: “NESSUN ALLARME E = Esci “.
Visualizzazione allarmi:
Grandezze interne:
Visualizzazioni
Collegamenti Interni:
sono visualizzate le grandezze V01 a V20 e il valore assunto in quel
momento dalle stesse.
sono visualizzati i parametri S per la configurazione interna della scheda.
12.2.2 IMPOSTAZIONI:
MANUALE D'USO
Pagina 45 di 66
SERIE CTRD -CS6621-
REV.2.5 07/11/13
Il menù impostazioni è composto da:
Impostazione parametri:
Impostazione collegamenti
interni:
è possibile visualizzare e modificare tutti i parametri P.
è possibile visualizzare e modificare tutti i parametri S.
12.2.3 SIMULAZIONI:
Il menù simulazioni è composto da:
Riferimenti:
sono presenti due grandezze, offset di velocità E01 e offset di corrente
E02. La prima permette di creare internamente alla scheda un offset di
velocità da utilizzare come riferimento di velocità interno senza bisogno
di collegamenti esterni. La seconda crea un offset di corrente con il
quale è possibile comandare l’azionamento con il solo anello di
corrente.
12.2.4 AUTOTARATURE:
Il menù autotarature è composto da:
Taratura anello corrente:
Taratura ingressi analogici:
il convertitore esegue l’autotaratura delle costanti e dei coefficienti
dell’anello di corrente.
il convertitore esegue l’autotaratura degli ingressi analogici impostando
automaticamente i parametri relativi. (P56-P57-P58-P59-P60).
12.2.5 MEMORIZZAZIONI:
Il menù memorizzazioni è composto da:
Salvataggio parametri:
Ripristino da eeprom:
Ripristino parametri di
default:
Salvataggio parametri su
disco:
Cambio della Password:
da questo menù si esegue il salvataggio dei parametri modificabili su
EEPROM che altrimenti andrebbero persi allo spegnimento della
scheda.
con questa operazione è possibile ritornare ai parametri precedenti
all’ultima taratura fatta, sempre che non sia stato eseguito il salvataggio
parametri su EEPROM.
eseguendo questa operazione è possibile ritornare ai parametri di
default preimpostati in fase di collaudo della scheda.
questa operazione è possibile solo se collegati con un PC, permette di
eseguire un salvataggio dei parametri su un Hard Disk, o su un disco
floppy.
questa operazione è possibile solo se collegati con un PC, permette di
variare la password di accesso richiesto quando si entra nei menù
Impostazioni, Simulazioni, Autotarature e Memorizzazioni.
12.3 Modifica di un valore:
12.3.1 SIGLE DI IDENTIFICAZIONE:
Per i parametri e le grandezze presenti nei vari menù sono utilizzati i seguenti simboli:
“P”
=
sono indicati quei parametri presenti nel menù “Impostazioni” – “Impostazioni parametri”.
“S”
=
“V”
=
sono indicati quei parametri che modificano i collegamenti interni della scheda (Switch
interni), presenti nel menù “Impostazioni” – “Impostazioni collegamenti interni”
sono indicate tutte quelle grandezze interne che possono essere visualizzate nel menù
MANUALE D'USO
Pagina 46 di 66
SERIE CTRD -CS6621-
REV.2.5 07/11/13
“Visualizzazioni” – Vis. Grandezze interne”.
Queste sigle sono seguite dai numeri che identificano tutti i parametri e o grandezze.
12.3.2 COME MODIFICARE UN PARAMETRO:
I parametri sono modificabili solo nel menù “Impostazioni”. Una volta trovato il parametro “P” od “S” da
modificare premere il tasto S più volte fino a spostare il cursore sotto la cifra da cambiare, quindi tramite i
tasti + e/o – si aumenta o si diminuisce il valore. Mantenendo premuto il tasto + e/o- si ottiene lo
scorrimento dei numeri. Inserito il nuovo numero si deve premere il tasto E, quindi nuovamente il tasto S
per confermare il cambiamento, il valore modificato è immediatamente attivo e che una volta impostati tutti i
parametri è necessario eseguire il salvataggio su EEPROM, andando nel menù “Memorizzazioni”.
12.4 Segnalazione allarmi:
Se è intervenuto qualche allarme, in qualsiasi posizione ci si trovi all’interno dei menù, appare la scritta
lampeggiante “Allarme Presente”. A questo punto non eseguire il ripristino (reset) dal quadro o da S 30, (in
questo modo l’allarme è cancellato e non è possibile avere una diagnostica) ma andare nel menù
“Visualizzazioni” e quindi nel sottomenù “Visualizzazione Allarmi”, premere il tasto S e poi + e/o – per
verificare se ci sono più allarmi. Prendere quindi gli adeguati provvedimenti.
12.5 Settaggio della lingua di comunicazione:
Sul retro della scheda Display CS8G3 si trova uno dip-switch a 6 vie per il settaggio della “lingua” con la
quale sono visualizzati i messaggi e i parametri.
LINGUA ITALIANA
LINGUA INGLESE
N.B. Questa operazione va eseguita prima di dare tensione alla scheda o al terminale operatore.
MANUALE D'USO
Pagina 47 di 66
SERIE CTRD -CS6621-
REV.2.5 07/11/13
12.6 Settaggio Baud rate
Come già accennato al paragrafo precedente, sulla scheda terminale operatore, CS8G3, sono disponibili
due switches per l’impostazione dei baud rate; per la comunicazione fra PC e/o terminale operatore e la
scheda di regolazione:
Si tenga presente che:
9.600 baud rate
38.400 baud rate
57.600 baud rate
115.200 baud rate
N.B. Questa impostazione sul display deve essere fatta in concomitanza con l’impostazione fatta al
parametro P02 altrimenti il convertitore entra in errore comunicazione. Il settaggio degli
switches va fatto con il tastierino scollegato.
12.7 PARAMETRI:
La completa messa a punto dell’azionamento è eseguita assegnando il giusto valore ad ogni parametro; ma
i parametri che l’utente deve realmente modificare sono quasi sempre in numero limitato, perché la
maggior parte di loro richiede normalmente il valore di default.
Valore di default significa valore predeterminato (memorizzato nella memoria EPROM), che il sistema
assume automaticamente se l’utente non inserisce un valore diverso tramite l’interfaccia.
I parametri sono divisi in 2 gruppi:
Parametri “P”,
Parametri impostazione collegamenti interni “S” .
Per la descrizione dei parametri guardare par 9.7
MANUALE D'USO
Pagina 48 di 66
SERIE CTRD -CS6621-
REV.2.5 07/11/13
13. RETROAZIONE DA ENCODER
13.1 Descrizione collegamenti e tarature
La scheda regolazione CS 6621, dispone di un alimentatore tarabile tramite il trimmer P3 che partendo da
una tensione di 24v, ± 15% (morsetti CN6-1/2), consente di ottenere una tensione in uscita (morsetti CN63/4) compresa nel campo 5-18 Volt, 300mA massimi, per alimentare l’encoder. L’alimentazione è del tipo
switching step-down per cui se VA ed IA sono la tensione e la corrente assorbite dall’encoder e VI è la
tensione di alimentazione della scheda, la corrente di ingresso è:
II[mA] =
VA[V ] × IA[mA]
+ 15
VI[V ]
E’ possibile utilizzare la scheda con i seguenti tipi di encoder:
a) Encoder con uscite differenziali. I due canali d’uscita vanno portati agli ingressi CN6-5/6 (canale a) e
CN6-7/8 (canale b).
b) Uscite singole. Utilizzare i soli morsetti CN6-6 (canale a) e CN6-8 (canale b), nel qual caso il livello di
passaggio 0/1 è ½ VA con 10% di isteresi.
c) Open collector. Occorre predisporre le resistenze di carico sulle apposite torrette: R173 e R174 per
uscite npn, o R170 e R171 per tipo pnp. Il valore della resistenza si calcola conoscendo la massima
corrente che si vuole assorbire (generare) Ic con la seguente formula:
R[ Kohm] =
VA[V ]
Ic[mA]
La parte alimentatore ed ingresso impulsi sono galvanicamente isolati tramite optoisolatori, la parte di
decodifica è alimentata direttamente dalla scheda regolazione CS 6621.
La tensione VI può essere presa dal +24V della scheda regolazione se l’assorbimento è compatibile.
La frequenza di lavoro massima è data dalla relazione:
frequenza[ Hz ] =
NI × N . max 4
×
K
60
dove:
NI
impulsi per giro dell’encoder
N.max giri al minuto massimi del motore
K
coefficiente che è determinato da C61 (0 = x2, 1 = x4).
Il Jumper J4 chiuso esclude la retroazione della tachimetrica integrata nella scheda regolazione e passa la
regolazione all’encoder; se aperto il sistema lavora in dinamo tachimetrica.
Per lavorare con l’encoder bisogna impostare al parametro “P20” la massima frequenza di lavoro divisa per
4 per cui, semplificando la formula precedentemente vista, si può scrivere:
P 20 =
NI × N . max
60 × K
dove:
K=1
K=2
con C61=0
Con C61=1
Il campo di lavoro accettato per “P20” è 3000 – 25000 corrispondente ad una frequenza di lavoro compresa
fra 6 e 50 Khz.
Il riferimento lavora come con la dinamo tachimetrica e la frequenza massima si ha con V.rif. ± 10 V.
Impostando la connessione interna C1=6 viene riportato sull’uscita analogica programmabile (CN1-26) un
segnale ± 10V, proporzionale alla massima velocità del motore.
N.B.: - usare sempre la frequenza più alta possibile. Prima di procedere alla messa in marcia del
motore, tarare la tensione di alimentazione dell’encoder tramite il trimmer P3.
MANUALE D'USO
Pagina 49 di 66
SERIE CTRD -CS6621-
REV.2.5 07/11/13
13.2 Disposizione dei punti d’interesse
1
2
3
4
5
6
7
8
MANUALE D'USO
CN6
-Input +24v
-0v
-0v
-out 5-18v
-canale A
-canale /A
-canale B
-canale /B
Pagina 50 di 66
SERIE CTRD -CS6621-
REV.2.5 07/11/13
14. SCHEDA REGOLATORE DI CAMPO ES 95003
14.1 Descrizione:
La ES 95003 è un regolatore di tensione che, abbinato ad un convertitore serie CTRD o scheda CS 6621,
permette la regolazione della corrente di campo di un motore in corrente continua. La taratura della scheda
ES 95003 è fatta direttamente da terminale operatore o da PC tramite i parametri P34, P35 e P37.
Durante la fase di autotaratura dell’anello di corrente il sistema provvede da solo a mettere in blocco il
regolatore di campo e quindi a togliere la corrente di eccitazione.
14.2 Configurazione del convertitore:
Con tale scheda è possibile l’utilizzo di tutte le configurazioni del convertitore, programmabili tramite lo
switch “S8”, che non comportino l’inversione del campo; in particolare sono possibili le seguenti
configurazioni:
S8= 0 Doppio ponte di armatura con logica di scambio. L’utilizzo della scheda regolatore è limitato al
funzionamento a potenza costante (campo unidirezionale).
S8= 1 Unidirezionale unico ponte di armatura, solo ponte diretto. La scheda regolatore serve solo per
funzionamento a potenza costante.
S8= 2 Unidirezionale unico ponte di armatura, solo ponte inverso. La scheda regolatore serve solo per
funzionamento a potenza costante
14.3 Collegamento scheda eccitatrice con convertitore ctrd:
1
2
CE4
fino a 600A
CE2
INTERNAL FAN
solo fino a 360A
Alla morsettiera M2 della ES 95003 e precisamente ai morsetti 3-4 si collega la alimentazione (AC) della
scheda, tenendo presente che la max tensione d’ingresso è di 415 Vac. Ai morsetti 1-2 di M2 si collega
l’eccitazione del motore.
MANUALE D'USO
Pagina 51 di 66
SERIE CTRD -CS6621-
REV.2.5 07/11/13
E’ consigliabile collegare in parallelo al “campo” una resistenza da almeno 1 Kohm 100 Watt.
L'abilitazione del campo é fatta automaticamente dalla scheda di regolazione, quando é chiuso il Jumper
J8 della scheda di eccitazione.
14.4 Disposizione morsettiere:
M3
Flat cable
CS 6309
M2
Flat cable
CS 6814
∼
∼
0P
+24v
+24vI
CIE
+24c
IE
0s
Tar
/pwm
pwm
1 ECC+
12
11
10
9
8
7
6
5
4
3
2
1
M2
2 ECC3 AC∼
4 AC∼
1 +VA
M1
2 -VA
MANUALE D'USO
Pagina 52 di 66
SERIE CTRD -CS6621-
M3
REV.2.5 07/11/13
14.5 Significato jumpers e led:
J1
J2
J3
J4
J5
J6
J7
J8
LED D7
LED D14
LED D16
Non utilizzato
Taratura max Iecc
Taratura max Iecc
Taratura max Iecc
Taratura max Iecc
Cambio guadagno anello di corrente ON=basso, OFF=alto
(SEMPRE APERTO)
Abilitazione regolazione eccitazione ON=sblocco regolazione
Segnalazione presenza Iecc
Segnalazione presenza alimentazioni
Segnalazione sblocco regolazione
M3
J1
LED D7
J2 J3 J4 J5
LED D16
J8
MANUALE D'USO
J6
J7
LED D14
Pagina 53 di 66
SERIE CTRD -CS6621-
REV.2.5 07/11/13
14.6 Schema a blocchi della regolazione
ES 95003
REGOLAZ.
FL1
S1
__
S1
M
PWM
2
FL1
7
8
SIRIO
1745
7 S
__ 20
380
8 S
ON/OFF
J
1
POTEN
CS6814
D16
CS6309
+
VOLTAGE
J
-
___
PWM
VOLT.CUR.REG
+24V
I1
J6=0
J6=C
CURRENT
~
+24V
D
REFERENCE
I2
+
1
1
G1
G1
1
1 +24
1
1
1
1
1 I1
G3
+EC
+EC
K
2
4
3
G4
1
M2
AC
1
A
A
AC
4
~
TT26N
AC
-
3
AC
LMV
TAR
3
ZKB4
3
G2
G2
J
4
0S
1
I.E
J
K
G3
1 I2
J
5
+EC
+EC
J
AC
G4
AC2
1
3
2
4
A
A
TT26N
FLAT
+EC
D7
P24
LM
6
4
2 -15V
0S
2
0S
+24
+24
0P
10
11
~
12
~
-ECC
+24
J
9
=
4 LM
1 +15V
CIE
7
8
1
HTP
+5
=
TENSION
+5
-
=
+15
+15V
-15V
+15V
1
-15V
2
LEM
3 LM
=
ARMATURA
RT
=
TRANSDU
MANUALE D'USO
GN
Pagina 54 di 66
1
2
RT
VOLTA
D14
M1
+V
SERIE CTRD -CS6621-
-
3
REV.2.5 07/11/13
14.7 TARATURA DELLA SCHEDA:
La corrente massima erogabile é 24 Amp e dipende dal numero di spire passanti per il trasduttore di
corrente e dalla chiusura dei Jumpers secondo la seguente tabella:
J5
J4
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
0
J3
1
1
0
0
1
1
0
0
1
1
0
0
1
1
0
0
1
1
1
1
0
0
0
0
1
1
1
1
0
0
0
0
J2
1
1
1
1
1
1
1
1
0
0
0
0
0
0
0
0
Np: 1
24.0
22.6
21.2
19.9
18.5
17.1
15.8
14.4
13.0
11.6
10.3
8.9
7.5
6.1
4.8
3.4
Iecc max(A) per n° spire(Np)
Np:2
Np:3
Np:6
12.0
8
4
11.3
7.5
3.7
10.6
7
3.5
9.9
6.6
3.3
9.2
6.1
3.0
8.5
5.7
2.8
7.9
5.2
2.6
7.2
4.8
2.4
6.5
4.3
2.1
5.8
3.8
1.9
5.1
3.4
1.7
4.4
2.9
1.4
3.7
2.5
1.2
3
2
1
2.4
1.6
0.8
1.7
1.1
0.5
1=Jumper inserito, 0= Jumper aperto
Np=Numero di spire passanti nel trasduttore di corrente
I valori in tabella sono ricavati dalla seguente formula:
Errore. Non si possono creare oggetti dalla modifica di codici di campo.1 = (A)
Considerando i Jumpers J2, J3, J4 e J5 tutti inseriti, il valore ottenuto fra parentesi è 17.47; quindi si può
scrivere che:
= (A)
Dalla formula si può constatare che per avere 24 Amp in uscita sono necessarie n° 1 spire nel trasduttore.
La corrente di campo effettiva è data dalla seguente relazione:
= [A]
Dove P34 è il parametro che permette di regolare la corrente di eccitazione una volta tarata con le spire sul
trasduttore di corrente e i Jumper J2,J3,J4 e J5.
Per semplificare le operazioni di taratura della scheda sono stati previsti tre modelli con spire diverse nel
trasduttore di corrente:
1 spira: campo di utilizzo 24A÷6A
3 spire: campo di utilizzo 8A÷2A
6 spire: campo di utilizzo 4A÷1A
(I valori di corrente specificati sono da intendersi come valori di Iecc Max possibile con il tipo di scheda).
MANUALE D'USO
Pagina 55 di 66
SERIE CTRD -CS6621-
REV.2.5 07/11/13
A questo punto, conoscendo la corrente di eccitazione del motore, scegliere il modello di ES 95003 più’
opportuno e con l’aiuto della tabella (pag. 69), settare i Jumpers J2 ÷ J5 in modo che la corrente di
eccitazione sia circa 5 ÷ 10% in più’ di quella nominale max del motore.
La tensione di armatura va prelevata dal convertitore attraverso delle resistenze calcolate (vedi formula per
il calcolo di R1 e R15 ) e portata sulla morsettiera M1: +VA, -VA della scheda ES 95003.
NB: Le resistenze R1, R15 sono normalmente già calcolate e montate direttamente all’interno della
eccitatrice. Comunque, riportiamo di seguito le formule per dimostrare quali sono i calcoli per trovarne il
valore e la potenza.
Linea 380Vac
------120//120//180Kohm = 45 Kohm=R1=R15
Linea 415Vac
------100//100Kohm = 50 Kohm=R1=R15
Linea 440Vac
------- 53Kohm=R1=R15
Dove:
Veff = tensione efficace nominale concatenata di rete; che alimenta il convertitore.
La potenza max. dissipata da ciascuna resistenza (R1 e R15)è data dalle seguente formula:
Pmax = R1x 0,04 [W] con R1 espressa in Kohm
Ai morsetti M3-5/4 (IE - 0S) c’è un segnale filtrato proporzionale alla corrente di campo con valore massimo
di -5V per Iecc.= Iecc. max, dove Iecc max corrisponde alla taratura fissata con NP e J2-5.
Rispettivamente dai morsetti M3-3/4 (Varm. - 0S) esce un segnale filtrato proporzionale al valore assoluto
della tensione del motore e con valore di -7V, quando la tensione di armatura corrisponde alla tensione
efficace nominale di alimentazione del convertitore.
14.7.1 PARAMETRI DI TARATURA
P25 range da 0 ÷ 100%
P35 range da 40 ÷ 120%
P34 range da 30 ÷ 100%
P37 range da 10 ÷ 100%
Una volta eseguite le tarature hardware si può agire sui parametri P34 (corrente di campo nominale) per
correggere eventualmente la corrente di eccitazione max dopo averla pretarata con le spire sul T.A. e con il
settaggio dei Jumper e P35 (tensione del motore in % di P38) per definire la tensione di armatura di
deflussaggio del motore.
Si deve considerare che:
a) se P34 = 100%, la corrente di campo è pari alla Iecc max tarata con i Jumper e n° spire sul T.A. Se si
dovesse scendere con P34 sotto il 70% e con i Jumper J5, J4, J3 e J2 aperti, è consigliabile per ragioni
di risposta del regolatore cambiare il numero di spire primarie NP.
b) se P35 = 100%, la tensione del motore di inizio deflussaggio è pari a quella impostata in P38, cioè:
dove Veff. è la tensione efficace nominale concatenata di rete che alimenta il convertitore; esempio:
380V, 415V, 440V, ecc.
quindi:
Sul parametro P37 va impostato il valore in % dato dalla seguente formula:
MANUALE D'USO
Pagina 56 di 66
SERIE CTRD -CS6621-
REV.2.5 07/11/13
Una volta impostati tali parametri si può fare marcia, verificare che il valore di campo e di tensione sia
quello desiderato ed eventualmente ritoccare i parametri; se il campo fosse poco induttivo (Tecc.<150ms) o
si notasse instabilità nella corrente di campo, converrà chiudere il Jumper J6 che riduce il guadagno della
regolazione. Dato che con tale sistema si limita anche la corrente max del campo nella zona deflussata con
la seguente relazione:
dove V6 e' il valore assoluto della percentuale di velocità del motore letta in V6, e' opportuno tenere P37
all'incirca il 5% più alto della velocità di inizio di diseccitazione per tenere conto di un eventuale reazione
d'indotto a meno che la macchina non sia particolarmente satura, nel qual caso P37 non va' aumentato.
In P36 va poi impostato il livello di allarme di massima tensione in funzione di P38; tenendo conto che
questo allarme e' basato sulla tensione calcolata e non letta , quindi soggetto ad una inevitabile
imprecisione fra i due valori; tale parametro dovrà essere del 10-20% superiore a P35, comunque va
aggiustato in modo che non intervenga in condizione di lavoro normale. Per una taratura più precisa e'
sufficiente mettere dapprima il valore più alto, quindi si porta il motore in zona deflussata, si legge V18
(tensione motore %) e si mette P36 tale che P36xP38>1,1xV18.
Con il parametro P25 e' poi possibile aumentare automaticamente il guadagno dinamico del regolatore di
velocità per tenere conto della diminuzione della coppia, a parità di corrente, nella zona a potenza costante;
l'aumento del guadagno avviene secondo la seguente formula:
Nella zona non deflussata, quando |V6| e’ < P37, il guadagno è tenuto costante al valore G=P23.
Dalla relazione sopra scritta si vede che si ha una compensazione pressoché totale della variazione di
guadagno dell'anello di velocità con P25 = 100% mentre non si ha alcuna compensazione se P25 = 0; per
cui se si pone P25=100% si ottiene all’incirca la stessa prestazione dinamica del regolatore di velocità in
qualsiasi condizione di lavoro.
Allarme di mancanza eccitazione:
Tale allarme si ha se alla scheda di regolazione del convertitore non è presente il segnale CIE quando
l'azionamento si aspetta di avere inserito il campo; ciò avviene subito dopo l'alimentazione della scheda se
S9= 0 o dopo che sul morsetto CN1-11 (I 11) della scheda di regolazione del convertitore è stato portato un
+24V se S9= 1. Con I 11=1, all'entrata in marcia passa il "tempo di attesa per chiusura contattore" (P46)
che consente al campo di portarsi al valore nominale; nel caso di campi particolarmente induttivi occorrerà
predisporre un tempo sufficiente perché ciò avvenga (P46>=2xT eccitazione dove T eccitazione e’ la
costante di tempo del campo 0.5÷1sec.). L'allarme e' ritardato di circa 1sec, per tenere conto
dell'assestamento del campo stesso; comunque, senza alcun ritardo, al momento del rilievo della
mancanza campo i limiti di corrente del ponte o dei ponti di armatura sono messi a zero e ci rimangono
fino a che il campo e' assente (salvo in autotaratura).
Il livello di controllo della presenza campo nella scheda ES 95003 e' fatto verificando che la corrente
effettiva del campo sia maggiore di 0,4 volte il valore calcolato per Iecc con la formula del paragrafo
precedente per cui, se il valore di P37 fosse più alto del 50-100% rispetto al valore di inizio diseccitazione
(P35), se la velocità fosse alterata, o se la tensione di diseccitazione (P38) fosse troppo bassa; si potrebbe
avere l'intervento del controllo di mancanza eccitazione una volta che il regolatore di tensione rilevasse una
corrente effettiva.
14.8 Modifica del numero di spire sul trasduttore amperometrico:
MANUALE D'USO
Pagina 57 di 66
SERIE CTRD -CS6621-
REV.2.5 07/11/13
Nel caso fosse necessario modificare il numero delle spire del T.A. della scheda ES 95003, bisogna tenere
presente che deve essere usato un cavo conduttore che sia in grado di portare la corrente richiesta max. di
eccitazione. Si tenga presente che la scheda ES95003 è in grado di erogare una corrente max di 24 Amp.
Attenzione!: rispettare il senso di avvolgimento delle spire. Il numero delle spire coincide con il
numero di passaggi all’interno del trasduttore.
AC1 4
AC2 3
ECC- 2
ECC+1
⇐
ESEMPIO
CON
N°3 SPIRE
QUESTO
CAVO PASSA
ALL’INTERNO
DEL T.A.
M2
Il disegno è la rappresentazione della scheda CS 6814 che si trova nella parte inferiore della ES 95003.
14.9 Procedura di sostituzione della ES 95003:
In caso di sostituzione della scheda, occorre tenere presente quanto segue:
1) Togliere tensione al quadro elettrico.
2) Verificare se la corrente max di eccitazione della scheda ricambio (4A, 12A, 24A; vedi targhetta di
identificazione applicata lateralmente al contenitore) corrisponda a quella della scheda da sostituire.
Se cosi fosse i Jumper J2, J3, J4 e J5 vanno inseriti nella medesima posizione della scheda guasta.
3) Se la corrente di uscita Imax è diversa è necessario riavvolgere il trasduttore di corrente.
4) Tarare i Jumper da J2 a J5 come da tabella al pag. 67.
5) Assicurarsi che i Jumper J1 e J7 siano aperti.
5) Aprire il Jumper J6 e inserirlo solo se si nota instabilità nella corrente di eccitazione (vedere pag. 67).
6) Assicurarsi che il Jumper J8 sia chiuso.
7) Collegare la scheda di ricambio come da schema, collegando un voltmetro in parallelo al campo.
8) Dare tensione al quadro e togliere lo sblocco regolazione al convertitore (filo collegato al morsetto
CN1-1 della scheda di regolazione).
9) Eseguire la marcia del convertitore e controllare sul voltmetro che la tensione di uscita corrisponda al
valore previsto, eventualmente ritarare il parametro P34.
10) Se necessario fare riferimento a questo manuale, per la taratura degli altri parametri ( P35, P37, P25).
11) Memorizzare le eventuali variazioni dei parametri eseguendo il salvataggio dei parametri su eeprom.
12) Togliere tensione al quadro e ricollegare lo sblocco regolazione sul CN1-1 della scheda regolazione;
precedentemente scollegato al punto 8.
13) La scheda è ora pronta per essere messa in funzione.
15. INTERFACCIA PROFIBUS CS948
MANUALE D'USO
Pagina 58 di 66
SERIE CTRD -CS6621-
REV.2.5 07/11/13
La CS948 è una scheda di interfaccia (con versione software 1.04) da applicare agli azionamenti
TDEMACNO delle serie CTRD; essa implementa il protocollo di comunicazione Profibus DP.
In base alle indicazioni del profilo standard di comunicazione per gli azionamenti (PROFIDrive), il
messaggio profibus è diviso in due parti indipendenti: dati di parametrizzazione e dati di processo. Questo
consente di operare a velocità diverse sui due tipi di dati.
La scheda si collega al bus Profibus per mezzo di un connettore DB9 con piedinatura secondo lo standard
Profibus.
15.1 Descrizione Hardware
1
Connettore verso l’azionamento
2
Dip
switch
per
la
selezione
terminazione (non montato)
3
Connettore DB9 per bus Profibus
4
Connettore flat per bus Profibus
1
della
2
3
4
Pin n.
1
2
3
4
5
6
7
8
9
Piedinatura del connettore DB9 (uguale a quella del Flat):
Nome
Descrizione
SHIELD
schermo protettivo
A
DE
GNDISO
+5vISO
Rx/Tx data positivo
Segnale di controllo per ripetitore
0v dell’alimentazione
Alimentazione +5v in uscita
B
Rx/Tx data negativo
15.2 Impostazione del numero di nodo
Il numero del nodo Profibus è lo stesso numero dello slave impostato tramite tastierino sull’azionamento.
Per cambiare il numero di nodo:
• Impostare il parametro P1: numero azionamento.
• Eseguire un salvataggio dei dati in EEPROM
• Spegnere e riaccendere l’azionamento.
Consultare il manuale d’uso dell’azionamento per la corrispondenza dei parametri e per le procedure di
salvataggio dei parametri su EEPROM.
15.3 Descrizione Messaggio Profibus
MANUALE D'USO
Pagina 59 di 66
SERIE CTRD -CS6621-
REV.2.5 07/11/13
Il messaggio profibus viene trasmesso ciclicamente dal master verso l’azionamento. La richiesta verso
l’azionamento è composta di due parti:
Messaggio Profibus
PKW
PZD
1) PKW : dati di parametrizzazione
2) PZD : dati di processo
La risposta dell’azionamento verso il master ha la stessa composizione.
15.4 Dati di parametrizzazione: PKW
La parte di messaggio PKW ha una lunghezza fissa (4 word), e consente di cambiare i parametri
dell’azionamento. Nel caso che l’applicazione non richieda nessun cambiamento di parametri, è sufficiente
impostare il campo AK = 0 (No Task), per comunicare all’azionamento che non c’è nessuna richiesta da
eseguire. Gli altri campi vengono automaticamente ignorati.
Il messaggio PKW è composto come segue:
PKW
PKE
16bit
AK
SPM
4 bit
1
IND
PWE
16bit
32bit
PNU
11bit
Nella descrizione seguente sono elencate tutte le funzioni e i tipi di parametri consentiti dalla scheda
CS948. Tuttavia gli azionamenti non ammettono tutte le possibilità di impostazione. Per sapere quali
combinazioni sono ammesse bisogna consultare i manuali degli azionamenti.
15.5 AK
Il campo AK contiene l’operazione da eseguire. Valori validi per la richiesta del master verso l’azionamento:
AK
0
1
2
3
4
5
descrizione
No task
Lettura byte
Lettura word
n.c.
Scrittura byte
Scrittura word
Valori validi per la risposta dell’azionamento verso il master:
MANUALE D'USO
Pagina 60 di 66
SERIE CTRD -CS6621-
REV.2.5 07/11/13
AK
0
1
2
3
4
5
14
descrizione
Nessun task
Lettura byte ok
Lettura word ok
n.c.
Scrittura byte ok
Scrittura word ok
Operazione non permessa
Nel caso in cui l’azionamento risponda con un codice 14 (operazione non permessa), nel campo PWE
viene specificato un codice di errore:
PWE
1
2
3
4
5
descrizione
Valore fuori range
Parametro protetto da chiave
Parametro protetto quando l’azionamento è in marcia
Parametro non esistente
Tipo operazione non ammesso
15.6 PNU
Il campo PNU contiene il tipo di parametro interessato. Per la descrizione dei parametri fare riferimento al
manuale d’uso. La seguente tabella riporta il valore dei campi AK e PNU del messaggio profibus per le
operazioni di lettura e scrittura:
descrizione
parametri P
parametri c
parametri d
parametri A
parametri I
parametri O
n. bit
16
8
16
8
8
8
Read (AK)
2
1
2
1
1
1
Write (AK)
5
4
-
15.6.1.1 PNU
1
2
3
4
5
6
15.7 IND
Il valore del campo IND è il n. del parametro. Per la descrizione dei parametri fare riferimento al manuale
d’uso.
15.8 PWE
Il campo PWE contiene il valore del parametro. Per la descrizione dei parametri fare riferimento al manuale
d’uso. L’allineamento dei campi all’interno dei 32 bit è il seguente:
PWE
32bit
16bit
8bit
MANUALE D'USO
Pagina 61 di 66
SERIE CTRD -CS6621-
REV.2.5 07/11/13
15.9 Esempio di scrittura n° 1:
SCRITTURA DI P3 = 50% (VELOCITÀ JOG CW)
Campo
valore dec.
valore esadec.
descrizione
AK
PNU
IND
PWE
=5
=1
=3
= 4095x50/100 = 2047
= 5H (4 bit)
= 001H (12 bit)
= 00 03H
= 00 00 07 FFH
(scrittura word)
( parametro di tipo P)
Domanda MS -> SL:
PKE
IND
PWE
5 001 00 03 00 00 07 FF
Risposta SL -> MS:
PKE
IND
PWE
5 001 00 03 00 00 07 FF
15.10 Esempio di scrittura n° 2:
SCRITTURA DI S3 = 1 (JCW PRIMA, JCCW DOPO LA RAMPA)
Campo
valore dec.
valore esadec.
descrizione
AK
PNU
IND
PWE
=4
=2
=3
=1
= 4H
= 002H
= 00 03H
= 00 00 00 01H
(scrittura byte)
( parametro di tipo S)
Domanda MS -> SL:
PKE
IND
PWE
4 002 00 03 00 00 00 01
Risposta SL -> MS:
PKE
IND
PWE
E 002 00 03 00 00 00 03
L’azionamento risponde con un codice EH (operazione non permessa) perchè il parametro S3 si può
modificare solo fuori marcia ( PWE = 03). Il parametro S3 rimane non impostato.
MANUALE D'USO
Pagina 62 di 66
SERIE CTRD -CS6621-
REV.2.5 07/11/13
15.11 Esempio di lettura n° 1:
LETTURA DI S10 (ESCLUSIONE ALLARMI)
Campo
valore dec.
valore esadec.
descrizione
AK
PNU
IND
=1
=2
= 10
= 1H
= 002H
= 0AH
(lettura byte)
( parametro di tipo S)
Domanda MS -> SL:
PKE
IND
PWE
1 002 00 0A 00 00 00 00
Risposta SL -> MS:
PKE
IND
PWE
1 002 00 0A 00 00 00 01
Quindi il parametro S10 = 1 (escluso allarme senso ciclico)
15.12 Esempio di lettura n° 2:
LETTURA DI V6 (REAZIONE DI VELOCITÀ)
Campo
Valore dec.
valore esadec.
descrizione
AK
PNU
IND
=2
=3
=6
= 2H
= 003H
= 06H
(lettura word)
( parametro di tipo V)
Domanda MS -> SL:
PKE
IND
PWE
2 003 00 06 00 00 00 00
Risposta SL -> MS:
PKE
IND
PWE
2 003 00 06 00 00 03 33
Quindi il valore letto è 333H = 819. Dal manuale d’uso risulta che V6 è una percentuale su fondoscala
4095, quindi
V6 = 819*100/4095=20.0%
MANUALE D'USO
Pagina 63 di 66
SERIE CTRD -CS6621-
REV.2.5 07/11/13
15.13 Dati di processo: PZD
La parte di messaggio PZD contiene i dati che devono essere scambiati ciclicamente tra master e slave:
diagnostica, set point, velocità misurata, ecc. Questi dati vengono presi in considerazione solo se la
connessione “abilitazione dati profibus” viene abilitata. Il Master spedisce alla scheda CS948 dei valori in
scrittura per l’azionamento e la scheda risponde con dei valori letti dall’azionamento.
Per abilitare questi dati impostare C62 = 1 (abilitazione dati di processo).
E’ possibile tramite C15 = 1 forzare, via Profibus, le connessioni da C21 a C34.
La lettura ripropone lo stato delle uscite digitali nell’ LSB mentre nell MSB abbiamo il codice allarmi
Control Word:
Status Word:
bit
descrizione
bit
descrizione
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
C21
C22
C23
C24
C25
C26
C27
C28
C29
C30
C31
C32
C33
C34
N.U.
N.U.
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
o1
o2
o3
o4
o5
o6
o7
o8
Vedi tabella allarmi
Vedi tabella allarmi
Autotaratura in corso
*** N.U.
*** N.U.
*** N.U.
Errore generico
Presenza allarmi
b8
0
0
1
1
b9
0
1
0
1
Descrizione
errore generico
richiesta fuori range
parametri non abilitati
non ammesso on line
Master → Slave
Control Word
word data1
word data2
word data3
word data4
word data5
word data4
word data5
Slave → Master
Status Word
word data1
word data2
word data3
Sul CTRD sono possibili solo quattro word in scrittura e cinque word in lettura. E’ possibile impostare il
parametro che intendiamo modificare inserendo nelle connessioni prestabilite (C16-C19) il numero del
parametro, cosi ad esempio se C16 = 3 modificheremo il parametro P3 con la word data1, se C19 = 29
modificheremo il parametro P29 con la word data4. Per le visualizzazioni il sistema è simile solo che
utilizzeremo le connessioni da C11 a C14 ed inseriremo il numero relativo alla grandezza di visualizzazione
(da d0 a d20) che intendiamo ricevere. La quinta word in lettura contiene i bit relativi agli ingressi elaborati
(combinazioni tra ingressi morsettiera e connessioni interne).
MANUALE D'USO
Pagina 64 di 66
SERIE CTRD -CS6621-
REV.2.5 07/11/13
N.B.: E’ importante imporre a 0 il contenuto delle connessioni (C16-C19) non utilizzate altrimenti i
parametri indirizzati da queste connessioni verranno comunque sovrascritti.
Se si abilita C15 sarà comunque necessario abilitare gli ingressi: marcia con ritardo e
abilitazione esterna. Non sarà più possibile resettare gli allarmi da tastierino.
Per conoscere i fondoscala utilizzati per il profibus consultare i seguenti raggruppamenti
Variabili memorizzate in modo diretto:
P01, P02, P20, P56, P57, P58, P59, P60, P80
Variabili memorizzate come n*10 (visualizz. con un decimale)
P11, P12, P13, P14, P15, P16, P17, P18, P23, P24, P33, P40, P41, P42, P43, P44, P46, P52, P54, P81,
P82, P83, P91, P92, P97, P98
Variabili con fondo scala = 4095 (fsV):
P03, P04, P05, P06, P07, P08, P09, P10, P21, P22, P27, P29, P30, P34, P35, P36, P47, P51, P55,
P90, P93, P94
d1, d2, d3, d4, d5, d6, d7, d8, d9, d10, d11, d12, d13, d14, d15, d16, d17, d18, d19, d20
Variabili con fondo scala = 6143 (fsT):
P49, P50, P95
Variabili con fondo scala = 32767 (fsN):
P25, P26, P31, P37, P39, P45, P48, P53
Variabili con fondo scala = 511 (fsC):
P96, P99
Variabili con fondo scala = 1000 (fsM):
P43
Variabili con fondo scala = 23170 (=32767/1.414)(fsX):
P38
La routine di gestione interfaccia PROFIBUS viene eseguita in polling mediamente ogni 2-3 ms (con punte
di attesa di 6 ms) nella condizione di offline, mentre con azionamento online (motore in marcia) si ha una
scansione ad ogni accensione (3.3 ms in media) con rete a 50 Hz, e una ogni due accensioni (5.5 ms in
media) con rete a 60 Hz.
N.B.: nelle varie descrizioni relative alla scheda di regolazione per CTRD si fa riferimento
indifferentemente ai termini SWITCH interni (SW01-:-SW70) e connessioni interne (c01-:-c70),
cosi' pure per le grandezze interne (V01-:-V20) oppure (d01-:-d20).
N.B.: durante autotaratura non viene eseguita la routine di gestione PROFIBUS, inoltre a fine
autotaratura si ha una fase di memorizzazione su eeprom durante la quale vengono sospese
le routines di gestione seriale e PROFIBUS.
A.A.A: Il profilo relativo alla seriale per le grandezze d17 d18 d19 è diverso e si rimanda al manuale
relativo (Az_Prot.txt).
MANUALE D'USO
Pagina 65 di 66
SERIE CTRD -CS6621-
REV.2.5 07/11/13
15.14 GESTIONE ALLARMI
La lettura degli allarmi tramite PROFIBUS avviene in modo analogo a quello usato sulla linea seriale:
•
•
•
•
con il codice PNU = 0x04 si entra nella richiesta allarmi
con il subcodice IND = 0x00 si chiede il riassunto allarmi
con il subcodice IND = 0x04 -:- 0x09 si chiede il dettaglio
con IND = 0 si ha word di risposta (in PWE) con i seguenti bit:
0008H = protezioni esterne
0010H = controllo alimentazioni
0020H = controllo corrente
0040H = controllo reazione di velocita`
0080H = termico motore
0100H = RAM, EEPROM
(OUT4)
(OUT5)
(OUT6)
(OUT7)
(OUT8)
(LED1)
• con IND = 4 -> protezioni esterne (subcodice COD_PROTE)
bit 0-:-7 = 8 allarmi ingressi espansione (n.u.)
bit 11 = mancanza consenso ingresso n. 12
bit 12 = mancanza consenso ingresso n. 13
bit 13 = mancanza eccitazione
bit 14 = sovratemperatura tiristori
bit 15 = external trip (per CS6611)
• con IND = 5 -> controllo alimentazioni (COD_RETE)
bit 0 = mancanza fase R
bit 1 = mancanza fase S
bit 2 = mancanza fase T
bit 3 = senso ciclico non corretto
bit 4 = tensione < minimo
bit 5 = tensione > massimo
bit 6 = alimentazioni interne
bit 7 = frequenza < minimo
bit 8 = frequenza > massimo
bit 9 = tensione motore > massimo
• con IND = 6 -> controllo corrente (COD_CONDUZ)
bit 0 = corrente istantanea troppo elevata
bit 1 = allarme conduzione
bit 2 = mancata conduzione su coppia R+Sbit 3 = mancata conduzione su coppia R+Tbit 4 = mancata conduzione su coppia S+Tbit 5 = mancata conduzione su coppia S+Rbit 6 = mancata conduzione su coppia T+Rbit 7 = mancata conduzione su coppia T+Sbit 8 = corrente mai continua in autotaratura
bit 9 = autotaratura impossibile
bit 10 = caduta resistiva troppo elevata
bit 11 = corrente non si azzera (inversione)
bit 12 = caduta resist. troppo bassa
MANUALE D'USO
Pagina 66 di 66
SERIE CTRD -CS6621-
REV.2.5 07/11/13
• con IND = 7 -> controllo reazione di vel. (COD_VA)
bit 0 = mancanza reazione di velocita`
bit 1 = reazione di velocita` rovescia
bit 2 = motore in sovravelocita`
bit 3 = motore in movimento durante autotar.
• con IND = 8 -> termico motore (COD_TERM)
bit 0 = preallarme termico motore
bit 1 = preallarme termico azionamento
bit 2 = allarme termico motore
bit 3 = allarme termico azionamento
bit 8-:-15 = 8 allarmi ritardati espansione (n.u.)
• con IND = 9 -> RAM e EEPROM (COD_PROTI)
bit 0 = errore EEPROM
bit 1 = errore RAM
bit 2 = errore scrittura eeprom
MANUALE D'USO
Pagina 67 di 66
SERIE CTRD -CS6621-