Capitolo II – Idrostatica
II.1 Sforzo
E’ possibile distinguere due tipi di forze agenti sul corpo fluido: le forze di corpo e le forze di
contatto.
Le forze di corpo sono in grado di penetrare in tutte le parti del corpo fluido e di agire su di esse: è
pertanto naturale pensarle come distribuite sul volume occupato dal corpo fluido. La forza di
gravità è il più importante esempio del primo tipo di forze, ma vanno ricordate anche le forze di
natura elettromagnetica, che agiscono sui fluidi che trasportano cariche elettriche, e le forze
apparenti, che agiscono sui fluidi in movimento in sistemi di riferimento non inerziale. Le forze di
volume o di corpo vengono introdotte in Idrodinamica tramite le rispettive densità. Ad esempio per
le densità della forza peso e delle forze apparenti agenti sul fluido in moto in un riferimento non
inerziale, con velocità di rotazione angolare Ω=Ω(t) e di traslazione v=v(t), si ha:
f p = − ρ g k
& ×r
f a = − ρ v& + Ω × Ω × r + 2Ω × u + Ω
(
)
(1)
in cui k è il versore dell’asse z, orientato verso l’alto, e r è il vettore posizione del punto considerato
nel corpo fluido in cui si calcola la densità della forza apparente. u è la velocità relativa del fluido
rispetto al sistema di riferimento in moto.
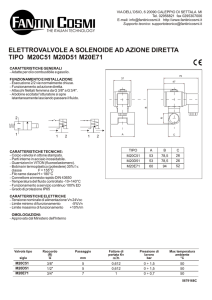
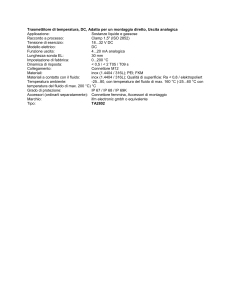
Per comprendere il ruolo e la modalità di azione delle forze di contatto, si consideri un corpo fluido
di volume V, in equilibrio sotto l’azione di una distribuzione di forze di corpo. Si divida il corpo
fluido in due porzioni, limitate da una superficie A: affinché ciascuna delle due porzioni risulti in
equilibrio è necessario esercitare su di esse, attraverso A, un sistema di forze costituenti l’azione
reciproca che si scambiano le due porzioni (figura II.1).
V2
V1
A
A
Π
−Π
Figura II.1 Partizione del corpo fluido in due corpi in equilibrio
Tale sistema di forze, costituito da due forze Π uguali in modulo e direzione e di verso opposto, può
essere pensato come derivante da una distribuzione continua di forza di contatto sulla superficie A.
1
In altre parole si può ipotizzare una partizione della superficie di separazione in aree elementari dA
sulle quali agiscano forze di contatto elementari dΠ. Il rapporto:
φ=
dΠ
dA
(2)
è definito, per dA che tende a zero, sforzo agente sulla superficie dA. Lo sforzo è un vettore,
avente le dimensioni di una forza per unità di superficie: [Nm-2], funzione del tempo, della
posizione attorno cui si fa tendere a zero dA e della giacitura di quest’ultima. La forza di contatto
agente sull’area elementare dA si calcola immediatamente dalla (2):
dΠ = φ dA
(3)
e di conseguenza, la forza di contatto risultante su A, si calcola tramite la:
Π = ∫ φ dA
(4)
A
II.2 Dipendenza dello sforzo dalla giacitura. Tetraedro di Cauchy.
Si è detto sinteticamente che lo sforzo agente su una superficie elementare passante per un punto
dipende dall’orientamento o giacitura della superficie stessa, oltre che dalla posizione e dal tempo.
In altre parole, sulle superfici elementari passanti per il medesimo punto, con normali aventi
direzione diversa, lo sforzo assumerà valori diversi. Si può tuttavia mostrare che, se si conoscono
gli sforzi relativi a tre superfici elementari passanti per lo stesso punto e aventi normali
mutuamente perpendicolari (dunque linearmente indipendenti) è possibile calcolare lo sforzo su
una superficie elementare, comunque orientata, come combinazione lineare degli sforzi noti, con
coefficienti le componenti del versore normale alla superficie su cui si vuole calcolare lo sforzo.
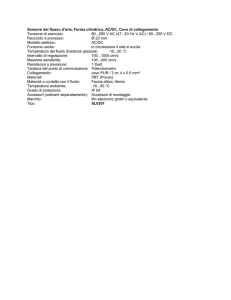
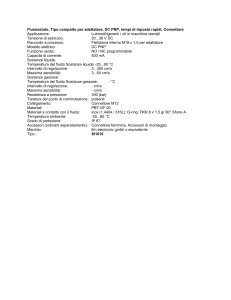
A tale scopo si consideri l’elemento fluido avente forma di tetraedro (tetraedro di Cauchy),
riportato in figura II.2, delimitato dalla superficie di contorno costituita dalla faccia dA di normale
entrante n, avente componenti nx, ny, nz, e dalle facce di area pari alle proiezioni di dA sui piani
normali agli assi coordinati:
(5)
dA n ⋅ i = −dAn x , dA n ⋅ j = − dAn y , dA n ⋅ k = − dAn z
di normali entranti rispettivamente coincidenti con i versori i,j,k; il segno meno è dovuto al fatto
che, per definizione, l’angolo formato dal versore n con i versori i,j,k è compreso tra π/2 e 3π/2.
Si imponga ora l’equilibrio delle forze di corpo e di contatto agenti sul tetraedro fluido. A tal fine si
potranno esprimere le forze di corpo come f c dV , essendo fc la densità delle forze di corpo
(comprese eventualmente quelle di inerzia) e dV il volume del tetraedro. Per quanto riguarda le
forze di contatto, si dovrà esprimere la risultante delle forze di contatto agenti sul tetraedro
attraverso la superficie che lo delimita. Indicando dunque con φ ,φ x ,φ y ,φ z gli sforzi agenti
rispettivamente sulle superfici dA ,−dAn x , − dAn y , − dAn z si ha:
f c dV + (φ − φ x n x − φ y n y − φ z n z )dA = 0
(6)
Il volume del tetraedro dV e l’area dA possono essere espressi rispettivamente come αl 3 , β l 2 . Di
conseguenza la (6) diviene:
2
f cαl 3 + (φ − φ x n x − φ y n y − φ z n z )β l 2 = 0
(6)
in cui: l,α,β sono rispettivamente una dimensione spaziale caratteristica del tetraedro (ad es. un lato
del tetraedro) e i coefficienti di proporzionalità del volume del tetraedro dV e della superficie dA
rispetto a l 3 , l 2 .Si divida primo e secondo membro per β l 2 :
fc
α
l + φ = φ x nx + φ y n y + φ z nz
β
(7 )
z
y
n
i
dA
dA nx
j
x
dA ny
k
dA nz
Figura II.2 Il tetraedro di Cauchy.
Facendo tendere a zero l, ipotizzando che il tetraedro racchiuda sempre il medesimo punto, il
termine contenente le forze di corpo si annulla e di conseguenza dalla (7) si ha:
φ = φ x nx + φ y n y + φ z nz
(8)
La formula (8) esprime sinteticamente il fatto che: lo sforzo agente su una superficie elementare
dA, di versore normale n, passante per un punto, risulta dato alla combinazione lineare degli
sforzi agenti su tre superfici elementari passanti per il medesimo punto, le cui normali i,j,k siano
linearmente indipendenti. I coefficienti della combinazione lineare sono le componenti del
versore normale n rispetto alle direzioni individuate dalle normali i,j,k. Il risultato importante
consiste pertanto nel fatto che se si conoscono gli sforzi agenti su tre superfici aventi normali
linearmente indipendenti (ossia mutuamente perpendicolari) passanti per il medesimo punto è
possibile ottenere lo sforzo φ su una superficie elementare di normale n passante per quel punto.
Si proietti ora la (8) sulle direzioni individuate dai tre versori linearmente indipendenti i,j,k,
associati agli assi x,y,z e si indichi con ϕ ij la componente secondo l’asse i dello sforzo agente sulla
superficie avente come normale il versore dell’asse j. Pertanto con ϕ xy si indica la componente
secondo x dello sforzo agente sulla superficie avente come normale il versore j dell’asse y. Il
primo indice denota la direzione della componente di sforzo, il secondo la direzione della normale
alla superficie sulla quale lo sforzo agisce.
3
Si ha:
φ ⋅ i = φ xx n x + φ xy n y + φ xz n z
φ ⋅ j = φ yx n x + φ yy n y + φ yz n z
φ ⋅ k = φ zx n x + φ zy n y + φ zz n z
(9)
La (9) può essere vista come il prodotto righe per colonne della matrice:
φ xx
φ yx
φ
zx
φ xy
φ yy
φ zy
φ xz
φ yz
φ zz
(10)
per il vettore colonna di componenti: (nx, ny, nz). In altre parole lo sforzo agente su una superficie
di normale n è espresso come il prodotto righe per colonne della matrice (10) per il versore
colonna n. La relazione tra le componenti cartesiane dello sforzo e le componenti della giacitura
è una relazione lineare. La linearità della relazione è una proprietà che vale indipendentemente
dal sistema di riferimento adottato.
Le quantità ϕ ij sono sforzi. Se gli indici sono uguali rappresentano componenti di sforzo normale
alla superficie su cui agiscono, se sono diversi rappresentano componenti di sforzo tangenti alla
superficie su cui agiscono. Definita la pressione p come la media aritmetica dei tre sforzi normali:
p=
φ xx + φ yy + φ zz
3
(11)
è possibile esprimere la (10) come:
φ xx
φ yx
φ
zx
φ xy
φ yy
φ zy
φ xz p
φ yz = 0
φ zz 0
0
p
0
0 φ xx − p
φ xy
φ xz
0 + φ yx
φ yy − p
φ yz
p φ zx
φ zy
φ zz −
p
(12)
ossia come la somma di una matrice che fornisce la parte di sforzo, espresso tramite la pressione,
puramente normale alla superficie su cui agisce e di modulo indipendente dalla giacitura, ossia da n,
e in una parte, detta residua, che tiene conto di una parte normale e della parte tangenziale, entrambi
di modulo dipendenti da n. In simbologia matriciale, detta I la matrice identità e
Φ, Φ R rispettivamente la matrice a primo membro e la seconda matrice a secondo membro della
(12), dette rispettivamente matrice degli sforzi e degli sforzi residui, si ha:
Φ = pI + Φ R
(13)
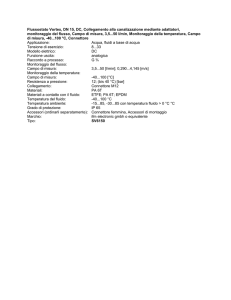
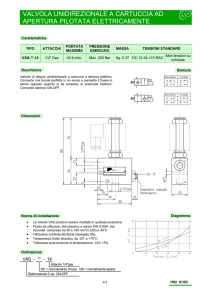
La matrice Φ è simmetrica; in altre parole i suoi elementi soddisfano la condizione: ϕ ij = ϕ ji . Tale
proprietà si verifica imponendo l’equilibrio alla rotazione di un elemento fluido piano (figura II.3),
di forma quadrata, di lato l, attorno al suo centro di figura o. I versi degli sforzi tangenziali sono
compatibili con il fatto che il sistema di sforzi deve essere localmente in equilibrio. Le forze di
corpo (comprese eventualmente quelle di inerzia) e quelle dovute agli sforzi normali, danno un
contributo nullo al momento calcolato rispetto ad o: le forze di corpo sono infatti applicate in o,
mentre le forze dovute agli sforzi normali hanno retta d’azione passante per o. L’equilibrio alla
4
rotazione pertanto coinvolge esclusivamente il momento delle forze elementari dovute agli sforzi
tangenziali e fornisce:
ϕ xy l 2 − ϕ yxl 2 = 0 ⇒ ϕ xy = ϕ yx
avendo assunto positivo il momento che tende a far ruotare l’elemento in senso antiorario. Il
ragionamento può facilmente essere esteso ad un elemento cubico, calcolando i momenti, aventi il
verso concorde con i versori i,j,k, ottenendosi tre relazioni di simmetria per gli sforzi tangenziali.
y
ϕ yy
ϕ xy
ϕ yx
ϕ yx
o
ϕ xx
ϕ xx
ϕ yy
ϕ xy
x
Figura II.3 Equilibrio alla rotazione dell’elemento fluido
La proprietà di simmetria si estende alla matrice Φ R , ottenendosi quest’ultima per sottrazione dalla
matrice Φ della matrice pI, simmetrica.
Lo sforzo ϕ, agente su una superficie dA avente normale n, può dunque essere espresso nel modo
seguente:
φ = Φn = pn + Φ R n
(14)
e pertanto le sue componenti secondo i versori n e τ, rispettivamente normale e tangenziale a dA
sono date dalle:
φ ⋅ n = Φn ⋅ n = p + Φ R n ⋅ n
φ ⋅ τ = Φn ⋅ τ = Φ R n ⋅ τ
(15)
Si osservi quanto segue:
•
•
la componente normale viene espressa come la somma della quantità p e della quantità
Φ Rn ⋅ n ;
la grandezza p è la pressione, dimensionalmente omogenea ad uno sforzo e perciò misurata
in [Nm-2]. Essa non dipende dalla giacitura della superficie elementare su cui agisce, ma
solo dalla posizione e dal tempo. Dipende inoltre dal moto. Poiché i fluidi non resistono a
5
•
•
sforzi di trazione, assunti positivi gli sforzi di compressione, p potrà assumere solo valori
positivi o al limite nulli.
la parte di componente normale Φ R n ⋅ n dipende dalla giacitura della superficie elementare
su cui agisce, oltre che dalla posizione e dal tempo. Dipende inoltre dal moto.
La componente tangenziale Φ R n ⋅ τ dipende dalla giacitura della superficie elementare su
cui agisce, oltre che dalla posizione e dal tempo. Dipende inoltre dal moto.
La dipendenza della pressione dalla posizione, dal tempo e dal moto viene ottenuta risolvendo le
equazioni di equilibrio dinamico del corpo fluido, che verranno esaminate in seguito.
La dipendenza della componente tangenziale Φ R n ⋅ τ e della parte di componente normale Φ R n ⋅ n
dal moto viene invece espressa dalla relazione costitutiva che, nei fluidi viscosi, mette in relazione
tali componenti con la velocità con cui il corpo fluido si deforma.
Nel seguito verranno considerati esclusivamente fluidi viscosi Newtoniani, in cui le componenti
Φ R n ⋅ n ,Φ R n ⋅ τ dipendono linearmente dalla velocità con cui si deforma il corpo fluido e tendono
a zero al tendere a zero di questa, cioè sono nulli in un fluido in quiete. Semplificando, si può
affermare che in un fluido viscoso Newtoniano in quiete, le componenti Φ R n ⋅ n ,Φ R n ⋅ τ ,
considerate rispetto a qualsiasi superficie elementare dA, sono nulle. Un fluido viscoso newtoniano,
sottoposto a componenti di sforzo tangenziali inizia immediatamente a deformarsi.
II.2 Equazione indefinita dell’idrostatica.
Un corpo fluido è in quiete rispetto ad un dato riferimento se, rispetto a quest’ultimo, la velocità e
l’accelerazione sono nulle in tutti i punti appartenenti al corpo fluido. Tale definizione implica
che un corpo fluido in quiete rispetto ad un riferimento, potrebbe non esserlo in un altro. Basti
pensare ad una massa d’acqua in un contenitore in rotazione con velocità angolare costante. Dopo
un certo tempo l’acqua si dispone in quiete rispetto al contenitore. L’osservatore posto in un sistema
di riferimento fisso osserva un moto della massa fluida, che si muove in effetti rigidamente come se
fosse un tutt’uno con il contenitore.
Le forze di corpo agenti su un corpo fluido in quiete rispetto ad un dato riferimento in moto rigido
& = 0.
stazionario sono la forza peso e le forze apparenti, date dalla (1) con u=0, Ω
Per quanto riguarda lo sforzo agente su una qualsiasi area elementare dA, definita in seno al corpo
fluido, essendo nulle le componenti della matrice Φ R , stante quanto affermato nel precedente
paragrafo, si ha:
(16)
φ = pn
Si vuole ora imporre l’equilibrio delle forze su un elemento fluido, pensato per semplicità come un
cubetto infinitesimo di lato l. Tale equilibrio deve esprimere il fatto che la somma delle risultanti
delle forze di corpo e di contatto è nulla. La risultante delle forze di corpo vale, considerando la sola
forza peso:
(17 )
− ρg l 3 k
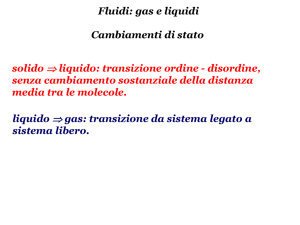
Mentre per la risultante delle forze di contatto si devono considerare le pressioni agenti su tutte le
facce del cubetto. Tra facce opposte si avrà ovviamente una variazione di pressione dp, legata alla
variazione di posizione. Tale variazione può essere espressa per mezzo di uno sviluppo in serie di
Taylor della pressione di punto iniziale x,y,z arrestato al primo ordine. Pertanto per la risultante
delle forze di contatto si ha, facendo riferimento alla figura II.4:
6
∂p
∂p
∂p
∂p
∂p
∂p
pl 2 (i + j + k ) − p + l l 2 i − p + l l 2 j − p + l l 2 k = − i +
j + k l 3
∂x
∂y
∂z
∂y
∂z
∂x
- (p+(dp/dz) l) l2 k
z
(18)
- (p+(dp/dy) l) l2 j
p l2 i
- (p+(dp/dx) l) l2 i
y
l
p l2 j
p l2 k
x
Figura II.4. L’elemento fluido in quiete e le forze di contatto agenti su di esso.
Il secondo membro della (18) esprime la risultante delle forze di contatto agenti sul cubetto fluido
attraverso la sua superficie: sommando a tale risultante la risultante delle forze di corpo (17),
dividendo per l3 e facendo tendere l a zero, si ha:
− grad( p ) − ρgk = 0
(19)
La (19) è l’equazione indefinita della statica per il corpo fluido soggetto alla sola forza di gravità.
L’equazione (19) è detta indefinita in quanto vale per ogni singolo punto occupato dal corpo fluido
in quiete. Se il fluido è omogeneo e incomprimibile, la densità è costante in tutta la massa fluida e il
secondo termine a primo membro può essere scritto nella forma grad(ρgz ) ossia come il gradiente
del potenziale della densità della forza peso. Ne segue che la (19) diviene:
grad( p + ρgz ) = 0
(20 )
La soluzione della (20) è data dalla:
p + ρgz = cost
(21)
in cui la costante si intende rispetto allo spazio ed al tempo. Il risultato ottenuto dalla (21) è di
estremo interesse. In pratica afferma che in un corpo fluido incomprimibile in quiete rispetto ad un
sistema di riferimento in cui agisce la sola forza peso, le superfici a pressione costante o isobare
sono i piani z=cost, ossia le superfici orizzontali.
Dalla (21) si ottiene la distribuzione di pressione in un fluido omogeneo, incomprimibile in quiete
sottoposto all’azione della gravità. Si è soliti porla nella forma:
p
+ z = ζ = cost
ρg
(22)
in cui si mette in evidenza il fatto che nel corpo fluido incomprimibile in quiete rispetto ad un
sistema di riferimento in cui agisce la sola forza peso la grandezza ζ, dimensionalmente omogenea
ad una quota e definita quota piezometrica, resta costante.
7
II.3 Equazione globale dell’Idrostatica
Si consideri un corpo fluido omogeneo, incomprimibile, in quiete. L’equilibrio delle forze imposto
su tale corpo deve esprimere il fatto che la risultante delle forze di contatto esercitate sul corpo
attraverso la superficie di contorno σ, del volume materiale occupato dal corpo, e delle forze di
corpo deve essere nulla. Pertanto:
(23)
∫ pndσ + ∫ f dV = 0
c
σ
V
In cui si è indicato con f c la densità delle forze di corpo ed n la normale entrante alla superficie di
contorno di V. Se le forze di corpo coincidono con la sola forza di gravità, la (23) diviene:
(24)
∫σ pndσ − ∫ ρgkdV = 0
V
di solito posta nella forma: Π+G=0, essendo: Π = ∫ pndσ , G = − ∫ ρgkdV rispettivamente le
σ
V
risultanti delle forze di contatto, dovute alla pressione, esercitate sul corpo attraverso la superficie di
contorno σ e della forza peso. Si osservi che la (24) poteva essere anche ottenuta dalla integrazione
diretta sul volume del corpo della (19) grazie ad un teorema analogo al teorema della divergenza,
detto teorema del gradiente, il cui enunciato è sinteticamente il seguente:
∫ grad( p )dV = −σ∫ pndσ
(25)
V
Integrando la (19) e applicando il teorema del gradiente:
− ∫ grad( p )dV − ∫ ρgkdV = ∫ pndσ − ∫ ρgkdV = 0
V
V
σ
(26)
V
a secondo membro si ritrova la (24). L’utilità della forma globale si rivela pienamente nel calcolo
delle spinte esercitate da un corpo fluido su una superficie, come si vedrà nelle applicazioni.
8