")
Leggi fondamentali della dinamica
[I. Newton, ~ 300 anni fa]
• Dal punto di vista logico, postulati da cui è possibile
derivare altre leggi come teoremi.
• Scelte in modo che esse, e le loro conseguenze,
siano in accordo, entro le precisioni di misura, con le
osservazioni sperimentali.
• Nel tempo, nuovi fenomeni (e/o migliori precisioni) →
miglioramenti successivi; le vecchie leggi sono prime
approssimazioni delle nuove (ex. relatività speciale,
meccanica quantistica).
Paolo Bagnaia - CTF - 1b - Meccanica del punto
♠
1
Prima legge
“Un corpo non soggetto ad interazioni, permane nel suo stato di
quiete o di moto rettilineo uniforme.”
Sembra facile. In realtà :
! si richiede la conoscenza delle interazioni, a priori dal loro
effetto sul moto dei corpi (altrimenti è un enunciato “circolare”);
! obiezione : si può sempre trovare un sistema di riferimento in
cui il principio sia soddisfatto (ex. un sistema solidale con il
corpo allo studio), in modo che il principio sia banalmente
valido per tutti i corpi, soggetti ad interazioni, oppure no.
¿ come si risolve questo problema ?
Paolo Bagnaia - CTF - 1b - Meccanica del punto
♠
2
Soluzione
Prima legge modificata : “Un corpo non soggetto ad interazioni
permane nel suo stato di quiete o di moto rettilineo uniforme, in
un sistema di riferimento inerziale”.
! la legge dice che il moto dei corpi si può studiare solo nei
sistemi in cui non compaiono anomalie (accelerazioni non
dovute ad interazioni);
! dato un sistema di riferimento inerziale, tutti i sistemi, in quiete
o in moto rettilineo uniforme rispetto ad esso, sono anche essi
dei sistemi di riferimento inerziali;
! dal punto di vista della dinamica, quiete e moto rettilineo
uniforme sono equivalenti.
[NB. non abbiamo fatto ricorso al concetto di “stelle fisse” (?!)]
Paolo Bagnaia - CTF - 1b - Meccanica del punto
♠
3
Seconda legge
“Una forza impressa ad un corpo produce un’accelerazione
parallela alla forza e ad essa proporzionale; la costante di
proporzionalità (“massa”) non dipende dalla forza, ma dalle
proprietà intrinseche del corpo.”
→
→
F=ma
! richiede la conoscenza delle forze, a priori dal loro effetto sul
moto dei corpi (altrimenti è un enunciato “circolare”);
! il coefficiente “m” è la massa di un corpo :
" la massa non dipende dallo stato di quiete o di moto del corpo;
" la massa si mantiene la stessa per tutta la vita di un corpo.
Paolo Bagnaia - CTF - 1b - Meccanica del punto
♠
4
Le forze
• la seconda legge è la base di tutta la dinamica :
! osservando la natura, si descrivono le forze con leggi
matematiche;
! quindi, applicando la seconda legge, si calcola il moto
dei corpi [ in sistemi inerziali !!! ] ;
• le forze sono additive→: ex.,
se su un corpo si
→
esercitano due forze ( F1 e F2 ), la legge dice :
→
→
→
→
m a = F1 + F2 = FTot
Paolo Bagnaia - CTF - 1b - Meccanica del punto
♠
5
Unità di misura della forza
[F] = [m] · [a] = [m · l · t -2]
si misura in Newton (MKS) o in dine (CGS);
1 N = 1 Kg · 1 m / 1 s2;
1 dine = 1 g · 1 cm / 1 s2 = 1 N / 105.
Paolo Bagnaia - CTF - 1b - Meccanica del punto
♠
6
Terza legge
→
“Quando un corpo A imprime una qualsiasi forza FAB su un
B, automaticamente il corpo B imprime su A una forza
corpo
→
FBA uguale in modulo e direzione ed opposta in verso”
(Principio di azione e reazione).
→
→
FAB = - FBA
! non è particolarmente difficile : molti esempi pratici (nuoto,
barche a remi, ecc.);
! nei sistemi isolati, la somma vettoriale di tutte le forze (cioè la
forza totale) è sempre nulla, perché tutte le forze tra corpi,
comunque complicate, si cancellano due a due.
Paolo Bagnaia - CTF - 1b - Meccanica del punto
♠
7
La forza peso
→
→
F = mg · g
accelerazione di gravità
[costante, = 9.8 m/s2, verso il basso]
massa (meglio, “massa gravitazionale”)
forza
→
" g è diretta verso il basso (vedi oltre, “gravitazione”);
" mg = m per tutti i corpi; cioè la “massa” che compare nel
secondo principio è identica (o meglio, è proporzionale) a quella
che compare nella forza peso e nella legge di gravitazione
(perché ???);
" conseguenza : l’accelerazione di caduta è la stessa per tutti i
→
→
corpi (a = g), ed è indipendente dalla massa.
Paolo Bagnaia - CTF - 1b - Meccanica del punto
♠
8
I vincoli
• esempi : tavoli, rotaie, fili inestensibili, ...
• il “trucco” consiste nel sostituire nel calcolo il vincolo
con una forza ortogonale al vincolo, che produca lo
stesso effetto sul moto.
→
Ex. :
forza vincolare [=-mg]
→
peso [=mg]
Paolo Bagnaia - CTF - 1b - Meccanica del punto
♠
9
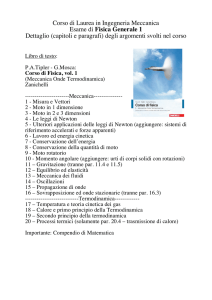
i vincoli nel moto circolare uniforme
a = v2 / r
F = m v2 / r
y
la forza è diretta
verso il centro
(forza centripeta)
a
a
x
in pratica, si può usare
un filo robusto (vincolo)
Paolo Bagnaia - CTF - 1b - Meccanica del punto
a
a
♠
10
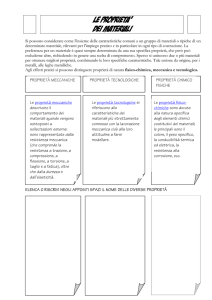
Scomposizione delle forze
•
•
•
esempio classico : il piano inclinato ;
→
la forza peso (Wtot) è diretta verso il basso;
scomposizione :
" sia θ l’angolo del piano inclinato
" W cos θ ortogonale al piano inclinato, bilanciata dalla
forza vincolare;
" W sin θ efficace, parallela al piano inclinato.
•
cioè, lungo il piano inclinato :
m a = W sin θ = m g sin θ
“come se” l’accelerazione di gravità g fosse
minore (× sin θ) e diretta lungo il p.i. .
Paolo Bagnaia - CTF - 1b - Meccanica del punto
♠
11
il piano inclinato
W cos θ
W sin θ
→
→
W cos θ
W = mg
θ
W sin θ
piano inclinato (caso senza attrito)
Paolo Bagnaia - CTF - 1b - Meccanica del punto
♠
12
Forze di attrito
Due tipi di attrito :
" attrito statico (impedisce l’inizio del moto) :
• opposto alle forze che agiscono sul corpo;
• valore massimo : Fstat(max) = µs N = µs m g
(in modulo, la direzione è differente !!!).
" attrito dinamico (agisce durante il moto) :
• F = µd N = µd m g
• direzione e verso = - v
" i coefficienti µs e µd sono differenti (µd < µs) e dipendono
dalle superfici dei corpi e dalla presenza di lubificanti,
polveri, etc. (cioè dalla presenza di asperità che
impediscano lo scorrimento delle superfici)
Paolo Bagnaia - CTF - 1b - Meccanica del punto
♠
13
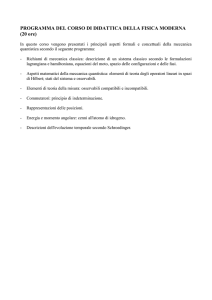
il piano inclinato + attrito
W cos θ
FTOT
Fa =
µ m g cos θ
W cos θ
W = mg
θ
W sin θ
piano inclinato (caso con attrito dinamico)
Paolo Bagnaia - CTF - 1b - Meccanica del punto
♠
14
il lavoro
• Si definisce lavoro di una forza F su un corpo che
si sposta di un tratto d :
L = F · d = F d cos θ
F,d concordi (θ < 90°);
• L>0
se
F,d discordi
• L<0
se
(θ > 90°);
F,d ortogonali (θ = 90°).
• L=0
se
ex.
a) caduta di un grave da fermo (forza peso) : L = m g h;
b) attrito dinamico : L < 0;
c) attrito statico : L = 0;
d) moto circolare uniforme (forza centripeta) : L = 0;
NB.
F può non essere l’unica forza che agisce sul corpo; si parla di
“lavoro di una forza su un corpo”.
Paolo Bagnaia - CTF - 1b - Meccanica del punto
♠
15
definizioni del lavoro
F
θ
L=F·d
d
definizioni
perfettamente
identiche
F
θ
d
L = F cos θ × d
= F × d cos θ
F cos θ
Paolo Bagnaia - CTF - 1b - Meccanica del punto
♠
16
Lavoro di forze variabili
L’espressione precedente può
essere “non definita” se una delle
grandezze in gioco varia in
modulo e/o in direzione nel
periodo considerato.
In tale caso, occorre scomporre il
tragitto in intervalli piccoli (al
limite, infinitesimi) e considerare il
lavoro totale come la somma dei
lavori infinitesimi, corrispondenti
ai tragitti:
Paolo Bagnaia - CTF - 1b - Meccanica del punto
F(x)
x
∫
L=
→
→
F(x)·dx
♠
17
Unità di misura del Lavoro
[e di tutte le grandezze con le stesse dimensioni * ]
[L] = [F d] = [m l2 t -2]
MKS : J = joule = 1 newton · 1 metro;
CGS :
erg = 1 dine · 1 centimetro = 1 J / 107.
_________________
*
Energia cinetica, Energia potenziale, Calore, Energia interna, … (vedi
nel seguito).
Paolo Bagnaia - CTF - 1b - Meccanica del punto
♠
18
Energia cinetica
• Un corpo, di massa m e velocità v (modulo),
possiede un’energia cinetica data da :
K = ½ m v2
• K dipende solo dal modulo della velocità, non
da direzione e verso;
• [K] = [ m v2 ] = [ m l2 t -2 ] = [ L ]
• pertanto K si misura in J (erg).
Paolo Bagnaia - CTF - 1b - Meccanica del punto
♠
19
teorema dell’energia cinetica
Il lavoro totale delle forze agenti su un corpo è uguale
alla variazione di energia cinetica del corpo stesso :
y
L = ∆ K = KFIN - KINI
vFIN
FIN
traiettoria
• valido per qualsiasi forza e
qualsiasi corpo (purché sia il
lavoro della forza totale);
vINI
INI
x
Paolo Bagnaia - CTF - 1b - Meccanica del punto
• correla grandezze differenti :
! lavoro (forze e
spostamento);
! energia cinetica (massa
e velocità).
♠
20
teorema dell’energia cinetica (2)
Dimostrazione (caso
unidimensionale con
accelerazione costante)
L = F ⋅ ∆x = m ⋅ a ⋅ ∆ x =
v - vo 1
= m⋅
⋅ ( v + v o )∆ t =
∆t 2
1
= m( v 2 - v 2o ) =
2
1
2 1
= mv - mv 2o .
2
2
Paolo Bagnaia - CTF - 1b - Meccanica del punto
amedia
v - vo
=
;
∆t
1
x = xo + v o ∆t + ⋅ a( ∆t )2 ;
2
1
x − xo = ∆x = v o ∆t + ( v − v o )∆t =
2
1
= ⋅ ( v + v o )∆t.
2
♠
21
teorema dell’energia cinetica (3)
Dimostrazione (caso
unidimensionale
generale)
L=
∫
x1
F ( x ) ⋅ dx
xo
dv
F ( x ) ⋅ dx = m ⋅ a ⋅ dx = m ⋅ ⋅ dx =
dt
dv
dv dx
= m ⋅ ⋅ ⋅ dx = m ⋅ ⋅ v ⋅ dx = m ⋅ v ⋅ dv
dx
dx dt
∫
v1
1
L=
mvdv = m( v12 − v o2 )
2
vo
Paolo Bagnaia - CTF - 1b - Meccanica del punto
QED
♠
22
La potenza
• definizione :
il lavoro compiuto nell’unità di tempo
W = dL / dt
1 Watt = 1 W = 1 J / 1 s
(anche :
cavallo-vapore = 736 W ;
lavoro in watt-ora = 3600 J)
W = dL / dt = d (F · x) / dt = F · v
Paolo Bagnaia - CTF - 1b - Meccanica del punto
[ se F costante ]
♠
23
Forze conservative
• una forza è conservativa se :
" in ogni ciclo chiuso L=0;
- oppure ! L in un cammino dipende solo dai punti iniziale e
finale e NON dalla traiettoria
" LAB + LBA = 0;
! LAB = -LBA.
y
B
A
[dimostrazione facile, da
LAB = -LBA per le proprietà
degli integrali]
x
Paolo Bagnaia - CTF - 1b - Meccanica del punto
♠
24
Energia potenziale
• se una forza è conservativa, si può definire una
funzione U(x), che dipende unicamente dal
punto dello spazio x, tale che [notare i “-” ] :
LAB = -∆UAB = U(xA) - U(xB) ;
U(xB) = U(xA) - ∫A F ·dx
B
• Teorema energia cinetica →
LAB = KB - KA = UA - UB ;
KB + UB = KA + UA = ETOT = costante
Paolo Bagnaia - CTF - 1b - Meccanica del punto
♠
25
differenze di energia potenziale
NB L’energia potenziale non è
una
grandezza
direttamente
misurabile.
Solamente
le
differenze di e.p. hanno rilevanza
in fisica (v. pag. prec.). La scelta
del punto di riferimento, rispetto a
cui si calcola l’e.p., si cancella
nelle differenze.
U(x0)=0
e.g. due scelte :
U*(x1)=0.
oppure
U(xA)-U(xB) = LAB = LA0 + L0B =
= LA1 + L1B = U*(xA)-U*(xB)
Paolo Bagnaia - CTF - 1b - Meccanica del punto
y
B
P0
P1
A
x
♠
26
Conservazione dell’energia
y
solo forze conservative
B
A
x
KB + UB = KA + UA = ETOT = cost.
Paolo Bagnaia - CTF - 1b - Meccanica del punto
ETOT è la
stessa nei vari
punti del
percorso !!!
♠
27
forze conservative : gravità
A
Gravità :
Ex.
oppure
U(x) = U(xo) - L
= U(xo) - m g h
= - m g h + costante
K(xA) = 0;
U(xA) = 0;
U(xB) = -mgh;
K(xB) = ½ m vB2 = ?
→ 0 = -mgh + ½ m vB2 → vB = √2gh
U(xA) = +mgh;
U(xB) = 0;
→ 0 + mgh = 0 + ½ m vB2
(!!!!)
→ vB = √2gh
Paolo Bagnaia - CTF - 1b - Meccanica del punto
B
♠
28
forze conservative : molla
Forze elastiche (ex. molla) :
F = - Kx
• la forza è proporzionale alla deformazione della molla;
• la costante di proporzionalità K indica la “robustezza” della
molla (= forza per deformazione unitaria);
• la forza è diretta lungo l’asse della molla, in senso opposto alla
deformazione;
• la forza è conservativa (facile : immaginare un ciclo).
∫
U(x) = - L = - (-Kx)dx = ½ K x2 + costante.
½ m v2 + ½ K x2 = costante.
Paolo Bagnaia - CTF - 1b - Meccanica del punto
♠
29
forze elastiche
x1
F1
x2 = 0
F2 = 0
x3
F3
0
Paolo Bagnaia - CTF - 1b - Meccanica del punto
x
♠
30
forze elastiche : energia
x1
F1
1→0
6→0
—
x2 = 0
2 0→
F2 = 0
—
5 0←
—
x3
3←0
F3
—
0
Paolo Bagnaia - CTF - 1b - Meccanica del punto
x
a v U K
—
4←0
—
a v U K
♠
31
Oscillazioni - moto armonico
Ex. molla (v. indietro) :
F = - K x;
U = ½ K x 2;
" la forza riporta il corpo nel punto di equilibrio (segno “-”)
→ oscillazioni, moto periodico;
" ricordiamo il moto circolare uniforme (a = - ωr);
" proiettiamo su un asse (ex. x) - moto “armonico” :
! x = A sin (ωt);
! v = dx/dt = Aω cos (ωt);
! a = dv/dt = d2x/dt2 = -Aω2 sin (ωt) = -ω2x ;
→ F = ma = - Kx = - KA sin (ωt) = - m A ω2 sin (ωt);
→ ω = √K / m ; T = 2π / ω = 2π √ m / K ;
" le oscillazioni sono “isocrone” (ω e T non dipendono da A)
→ oscillazioni più ampie sono compiute a velocità maggiore;
Paolo Bagnaia - CTF - 1b - Meccanica del punto
♠
32
moto armonico
y
proiettare il moto
circolare uniforme
sull’asse x
x
x
x
x(t) = A sin (ωt + φ)
T = 2π / ω
A
t
Paolo Bagnaia - CTF - 1b - Meccanica del punto
♠
33
moto armonico : energia
UK
x
[ω = √K / m ]
E = ½Kx2 + ½mv2 =
= ½K[Asin(ωt + φ)]2 + ½m[Aωcos(ωt + φ)]2 =
= ½KA2 = ½mA2 ω2 = costante
x,v
Aω
A
t
x(t) = A sin (ωt + φ)
v(t) = A ω cos (ωt + φ)
Paolo Bagnaia - CTF - 1b - Meccanica del punto
♠
34
forze conservative : pendolo
Fpeso = m g (verso il basso)
Ffilo = (vincolo lungo il filo)
L
θ
tutte le forze sono conservative.
U = m g h = m g L (1 - cos θ)
m
h=
L (1-cos θ)
anche : proiettare le forze lungo assi (parallelo e ortogonale al filo) :
FPAR = mg cos θ + T = 0
FORT = - mg sin θ ≈ - mg θ
(“-” indica la direzione verso
il punto di equilibrio)
Paolo Bagnaia - CTF - 1b - Meccanica del punto
♠
35
equazione del pendolo
Pendolo, caso di “piccole oscillazioni” :
x ≈ L θ;
F = - m g sin θ ≈ - mg θ = - mg x / L ;
" formalmente identico alla molla, con K = mg / L
→ oscillazioni isocrone;
frequenza, periodo :
! ω [= √K / m ] = √ g / L ;
! T = 2π / ω = 2π √ L / g ;
" moto armonico, di equazione
x = A sin (ωt);
A = xMAX = L θMAX.
Paolo Bagnaia - CTF - 1b - Meccanica del punto
♠
36
pendolo
θ
F⊥ = mg cos θ + T
= 0;
L
m
mg cos θ
h = L (1-cos θ)
θ
F|| = - mg sin θ
≈ - mg θ
mg sin θ
mg
Paolo Bagnaia - CTF - 1b - Meccanica del punto
♠
37
Forze non conservative
Ex. attrito :
• il lavoro dipende dal cammino (a
parità di coefficiente µ, maggiore
percorso = maggiore lavoro);
• la forza NON è conservativa (ex.
il lavoro in un ciclo chiuso NON è
nullo).
y
LAB > L’AB
B
A
x
L’energia si disperde nell’ambiente, e.g.
sotto forma di calore.
Paolo Bagnaia - CTF - 1b - Meccanica del punto
♠
38
Fine parte 1b
Paolo Bagnaia - CTF - 1b - Meccanica del punto
♠
39
")