TECNICA robotica
Robot mobile per la fruizione
e la ricostruzione 3D
di una caverna paleolitica
Tommaso Gramegna, Grazia Cicirelli, Massimo Ianigro, Gianni Attolico, Arcangelo Distante
L’obiettivo di questo lavoro è quello di sviluppare un robot mobile autonomo per la fruizione remota di
una grotta ricca di pitture e reperti preistorici.
Il luogo esplorato è la “Grotta dei Cervi” sita a Porto Badisco in Puglia. Tale grotta conserva pitture
murarie che risalgono all’era Neolitica.
L’uso di un robot mobile è ideale per questo tipo di task poiché non necessita di grosse modifiche
dell’ambiente né dell’installazione di nuove infrastrutture. Il sito archeologico, infatti, non deve né essere
danneggiato né subire interventi invasivi.
Il robot è in grado di esplorare l’ambiente, di costruire la mappa 2D della grotta, di posizionarsi rispetto
alle pitture e di ricostruire un modello 3D delle aree di interesse a partire da un set di tre immagini
acquisite da tre punti di vista differenti.
Keyword
Robot mobile, Navigazione Autonoma, Ricostruzione 3D,
Fruizione di Beni Culturali.
La terra conserva tesori artistici spesso inaccessibili al
pubblico a causa delle difficili condizioni di accesso, delle
caratteristiche strutturali ostili e della necessità di preservare tali tesori da deterioramento ed eventuali danni.
Nel sud dell’Italia, lungo la costa Adriatica, una grotta
custodisce uno dei tesori più sorprendenti e straordinari
per la sua valenza artistica e culturale.
Questa è la “Grotta dei Cervi” la quale ha conservato per
secoli, sui suoi muri, una grossa quantità di pitture di
scene di caccia, cervi, gruppi di uomini e piccoli animali.
Tali pitture risalgono all’era Neolitica.
I lunghi corridoi della grotta sono decorati con affascinanti pitture rosse e nere realizzate con ocra rossa e guano
di pipistrello.
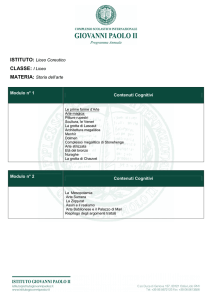
Alcuni di questi disegni sono mostrati nella figura 1.
La grotta è costituita da una serie di corridoi stretti e tortuosi, e il suo accesso è consentito solo ad un numero
ristretto di persone autorizzate le quali, durante l’esplorazione della grotta, devono sia avere cura della propria
incolumità, sia avere la massima cura nel preservare l’ambiente non danneggiandolo e non introducendo elementi
che potrebbero inquinarlo.
T. Gramegna, G. Cicirelli, M. Ianigro, G. Attolico, A. Distante Istituto di
Studi sui Sistemi Intelligenti per l’Automazione CNR - ISSIA, Bari
90 - Automazione e Strumentazione - Luglio-Agosto 2006
Figura 1 - Alcune delle pitture preistoriche presenti sui muri del
sito archeologico della “Grotta dei Cervi”
La soluzione tecnologica presentata in questo lavoro, per la
fruizione remota del sito, sembra essere la più adatta poiché
da un lato soddisfa le condizioni di conservazione della grotta, con i suoi tesori artistici e storici, e dall’altro assicura la
sicurezza degli utenti
L’uso, infatti, di un robot mobile, propriamente equipaggiato,
non necessita di grossi cambiamenti dell’ambiente riducendo
così al minimo il rischio di danneggiare la grotta e, inoltre,
navigando autonomamente, può gestire gli strumenti necessari per la visione, la misurazione e la caratterizzazione del sito.
È stata eseguita una sessione sperimentale in uno dei corridoi
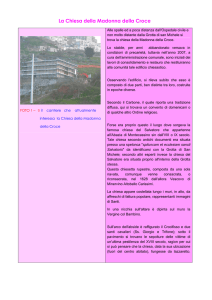
all’interno della Grotta dei Cervi. Nella figura 2 viene presentata l’unica mappa disponibile della struttura della grotta,
ricavata attraverso misurazioni manuali. Tale mappa dà un’i-
TECNICA robotica
dea della tortuosità e della lunghezza dei corridoi caratterizzanti la grotta. Sempre nella figura 2 viene evidenziata la zona
che è stata ispezionata dal robot durante la sessione sperimentale.
Il robot usato nella sessione sperimentale è costituito da una
piattaforma robotica mobile equipaggiata con un sensore
laser, sensori a ultrasuoni, inclinometri, una telecamera, un
compasso ed un’antenna per la comunicazione wireless fra il
robot ed un computer remoto.
il veicolo di ruote cingolate, ma in questo modo si rischierebbe di danneggiare pesantemente il suolo preistorico.
Utilizzando i diversi dispositivi sensoriali, di cui è dotato il
robot, è stato possibile, durante l’ispezione della grotta, ottenere una ricostruzione planare della superficie ispezionata e
una ricostruzione tridimensionale di alcune zone di particolare interesse.
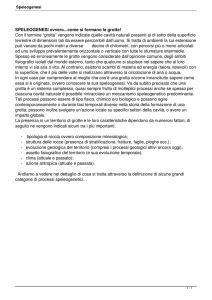
Figura 3 - Il robot mobile nella sua configurazione finale durante
la navigazione nella “Grotta dei Cervi”
Figura 2 - La mappa ricostruita manualmente della “Grotta dei
Cervi”. La zona evidenziata è il corridoio ispezionato dal veicolo
mobile
I sistemi sensoriali elencati sono stati opportunamente assemblati perché il robot soddisfacesse i requisiti del particolare
task da svolgere. Una immagine del robot assemblato è
mostrata nella figura 3.
La piattaforma robotica è costituita da quattro ruote da fuoristrada che possono affrontare pendenze del 45% e soglie di 9
cm. Ci sono, inoltre, sedici sensori sonar posizionati davanti e
dietro il robot, capaci di individuare ostacoli fino a 7 m di
distanza. La piattaforma robotica contiene quattro motori, un
processore locale e le batterie. Sulla piattaforma è stato installato un sensore laser capace di individuare oggetti fino ad una
distanza di 80 m con una risoluzione di mezzo grado. La piattaforma inoltre dispone di un compasso, di inclinometri e di
odometri con correzione inerziale.
Sulla piattaforma è stato posizionato un supporto di altezza
appropriata per ospitare sulla sua sommità il sistema di illuminazione e la telecamera. Tale supporto è in alluminio e ha
un’altezza di 1 m per poter acquisire le immagini delle pitture che, infatti, si trovano sui muri ad un’altezza compresa fra
1 e 2. A causa della completa oscurità della grotta è stato
necessario fornire il robot di una lampada per poter illuminare le zone d’interesse e permetterne la fruizione. La lampada
è stata posizionata opportunamente sul supporto in alluminio
per poter ottenere il miglior risultato. Durante la sessione sperimentale sono emerse alcune limitazioni strutturali del veicolo. In particolare, esso ha difficoltà a superare grosse irregolarità del terreno come dossi ripidi e buche profonde. Una
soluzione a questo problema potrebbe essere quella di dotare
La planimetria del sito è stata ottenuta usando il sensore laser.
Questa fornisce informazione nuova e utile, sebbene approssimata, sulla struttura della grotta. Tale informazione non era disponibile prima della ispezione con il nostro veicolo mobile. È importante notare che la struttura della grotta, fornita dalla mappa del
sito, è di particolare interesse per la conoscenza e la fruizione del
sito archeologico, poiché essa descrive la morfologia dell’ambiente. In questo modo ogni pittura può essere caratterizzata al
meglio studiando così il loro ruolo e il loro significato a partire dal
contesto e posizione in cui si trovano. Inoltre la planimetria del
sito è importante per la navigazione del robot all’interno della
grotta. Ricordiamo che uno dei problemi fondamentali della navigazione di un veicolo mobile è quello di determinare la sua posizione e orientazione nell’ambiente. Inoltre in questo particolare
contesto il robot deve essere in grado di raggiungere autonomamente una posizione designata (target) partendo da una qualunque posizione dell’ambiente. Questo può essere fatto utilizzando
l’informazione fornita dalla mappa costruita con il sensore laser.
A causa, però, della instabilità del veicolo per le irregolarità del
terreno, la posizione finale del robot nei pressi del target può essere imprecisa. Il robot deve, quindi, una volta raggiunto il target,
raffinare la propria posizione e orientazione rispetto ad esso. Per
la navigazione sono, inoltre, necessari elementi di riferimento per
permettere al robot di referenziarsi durante la navigazione. Questi
elementi possono essere artificiali, ossia oggetti esterni opportunamente inseriti nell’ambiente o naturali poiché sono elementi già
presenti nell’ambiente senza alcun intervento esterno. Nel nostro
contesto, a causa della impossibilità di modificare in alcun modo
il sito, sono stati considerati punti di riferimento naturali, ossia le
stesse pitture sono sia punti target per il veicolo sia punti di riferimento per la sua navigazione. Nella zona ispezionata quattro posi-
Luglio-Agosto 2006 - Automazione e Strumentazione - 91
TECNICA robotica
zioni target sono state definite per il robot, che corrispondono a
quattro zone particolarmente interessanti per la ricca presenza di
pitture preistoriche. Un’altra applicazione eseguita nel sito ispezionato è la ricostruzione del modello tridimensionale VRML del
muro circostante le pitture, usando tre immagini della stessa scena
acquisite da tre punti di vista differenti. Le immagini sono state
acquisite dalla telecamera del robot con lunghezza focale fissa. La
metodologia utilizzata usa come vincoli geometrici, le corrispondenze fra gli spigoli nelle differenti immagini. Di seguito sono
descritti, nel prossimo paragrafo, la costruzione della mappa planare del sito e il metodo usato per la ricostruzione 3D di una zona
della grotta. Infine sono presentate alcune conclusioni.
Ispezione della grotta preistorica
La soluzione tecnologica proposta in questo lavoro, per la fruizione di una grotta preistorica è caratterizzata dall’uso di un
robot mobile che, navigando nel sito, acquisisce le immagini
delle zone di particolare interesse per la presenza delle pitture
murarie preistoriche, inviandole ad una stazione remota.
Per quanto riguarda la navigazione del robot, uno dei problemi
fondamentali è la determinazione della posizione del robot nell’ambiente. La mappa planare del sito, ricostruita usando il
sensore laser, è utile per calcolare la posizione approssimativa
del robot nell’ambiente e quindi per la navigazione da una
posizione all’altra. Una volta che il veicolo raggiunge la posizione target, è necessario un posizionamento più preciso per
poter acquisire le immagini delle pitture da un punto di vista
ottimale.
In questo contesto, il problema da risolvere è quello del posizionamento automatico della telecamera montata sul veicolo.
Diversi metodi per la stima della posizione della telecamera
possono essere trovati in letteratura [1, 2, 3]. Molti di questi
usano modelli visivi o punti di riferimento che spesso sono
rappresentati da oggetti tridimensionali che devono essere confrontati con le rispettive proiezioni bidimensionali sul piano
immagine [4].
Spesso vengono utilizzati elementi di riferimento artificiali per
poter semplificare il problema della loro rilevazione sul piano
immagine [5], ma questo richiede di strutturare appositamente
l’ambiente di navigazione. Tale soluzione non può essere presa
in considerazione nel caso della grotta.
Nel contesto del visual servoing i metodi di localizzazione
sono classificati in base alla conoscenza o meno del modello
del target (metodi model-based [7] e metodi model-free [8]) o
alla conoscenza dei parametri della telecamera [6].
Il problema comune in questi metodi consiste nello stabilire la
corrispondenza fra il modello del target e l’immagine corrente, nel caso dei metodi model-based; e fra l’immagine di riferimento e l’immagine corrente per i metodi model-free. Se la
corrispondenza fra le caratteristiche del modello sono note a
priori, in letteratura si possono trovare molti metodi modelbased per la stima della posizione [9].
Gli autori seguono questo approccio proponendo una versione
nuova dell’algoritmo POSIT [10, 11]. Esso si basa su considerazioni geometriche che combinano la proiezione prospettica e
92 - Automazione e Strumentazione - Luglio-Agosto 2006
la proiezione ortografica scalata di punti caratteristici della
scena. L’algoritmo POSIT calcola la posizione di un oggetto
usando una approssimazione iniziale del modello prospettico
della telecamera e raffinando la stima in un ciclo fino ad ottenere la posizione prospettica finale. Il principale vantaggio di
questo metodo sta nel suo basso costo computazionale. Inoltre
l’algoritmo POSIT calcola la posizione della telecamera utilizzando una singola immagine e considerando il modello 3D del
target nel sistema di riferimento del target stesso. Le condizioni necessarie sono l’estrazione di almeno quattro punti non
complanari del modello bidimensionale del target sul piano
immagine e la giusta corrispondenza fra i punti caratteristici
estratti con quelli del modello 3D.
L’applicabilità di questo metodo in un ambiente complesso
come una grotta è stata convalidata come descritto in [12].
Costruzione della mappa planare
La mappa planare del sito costruita utilizzando il sensore laser
del robot permette di determinare la posizione approssimata
del robot nell’ambiente. Durante la navigazione del robot il
sensore laser colleziona i dati relativi all’ambiente per la successiva costruzione della mappa. A causa delle irregolarità del
terreno i dati laser vengono integrati con i dati forniti dagli
inclinometri al fine di ottenere l’informazione tridimensionale dell’ambiente. Il sensore laser potrebbe essere utile anche
per la ricostruzione della struttura del pavimento della grotta.
Infatti, durante la navigazione, orientando il raggio laser verso
il terreno si collezionerebbero dati relativi alla struttura dello
stesso. Questo risulterebbe molto utile per la navigazione
completamente autonoma del veicolo nella grotta. Partendo
dalla conoscenza della mappa del sito, uno degli obiettivi è
quello di realizzare un percorso permettendo la fruizione di
quelle zone particolarmente ricche di pitture preistoriche.
Elementi di riferimento artificiali, ma non invasivi, identificati dal sensore laser e distinguibili sulla mappa, sono utili per
determinare le posizioni di tali zone.
A tal fine, quattro bastoncini verticali sono stati posizionati
nelle vicinanze delle zone d’interesse, così il robot può sia
localizzarsi in queste zone sia permettere la fruizione visiva
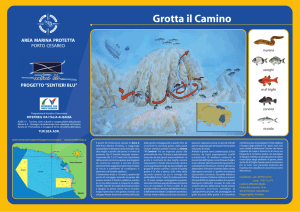
delle pitture. Nella figura 4 viene mostrata la mappa costruita
usando il sensore laser durante la navigazione del robot nel
corridoio ispezionato della Grotta dei Cervi. I quattro punti
rossi indicano la posizione dei bastoncini localizzati nei pressi delle zone particolarmente ricche di disegni preistorici.
Ricostruzione 3D delle pitture murarie
La seconda applicazione testata durante la sessione sperimentale nel sito è stata la ricostruzione del modello VRML completo delle quattro zone d’interesse. La ricostruzione del
modello 3D mediante tecniche di computer vision generalmente richiede l’estrazione, sull’immagine, di caratteristiche
delle scene, come punti, linee, spigoli, angoli ecc. e di metterli in corrispondenza con quelli tridimensionali [13, 14, 15].
Inoltre è importante determinare la corrispondenza fra punti
in immagini differenti poiché la precisione del modello risultante dipende fortemente dalla accuratezza di tali corrispondenze.
TECNICA robotica
angoli per ogni coppia di immagini, viene individuato l’insieme di
angoli appartenenti a tutte e tre le immagini. Questi angoli sono
detti inliers. Una volta note le corrispondenze, è possibile definire
la Matrice Fondamentale della telecamera, ossia la matrice contenente informazioni sui parametri intrinseci della telecamera (calibrazione) [18]. A questo punto tutti i dati utili per la costruzione
del modello 3D della scena sono a disposizione e tale modello è
ricavato applicando la tecnica del reticolo poligonale. Il modello
3D è stato costruito utilizzando il linguaggio VRML: prima viene
ricavato il reticolo triangolare della superficie 3D e poi la tessitura della scena, ottenuta dalle immagini, viene mappata su di esso.
Qui presentiamo un esempio del metodo di ricostruzione 3D
descritto, applicato a tre immagini della zona numero 4 indicata
nella figura 4. Nella figura 5(a) sono mostrate le tre immagini
della scena selezionata e nella figura 5(b) sono evidenziati gli
inliers estratti durante la procedura di matching. La figura 6, infine, mostra il modello tridimensionale della stessa scena.
Figura 4 - Mappa planare del corridoio ispezionato nella grotta.
I punti in rosso individuano le zone particolarmente interessanti
per la presenza delle pitture preistoriche
Il metodo usato in questo lavoro usa come vincoli geometrici
le corrispondenze degli angoli in immagini differenti. Una
scena 3D complessa è ricostruita usando un insieme di tre
immagini della stessa scena acquisite da tre punti di vista differenti. L’unico requisito è che siano acquisite dalla stessa
telecamera con la stessa lunghezza focale.
1. L’applicazione richiede che vengano eseguiti i seguenti
passi: acquisizione delle immagini; estrazione degli angoli;
costruzione delle corrispondenze sparse; determinazione degli
inliers; calibrazione della telecamera; ricostruzione 3D; visualizzazione del modello 3D. Una volta acquisite le tre immagini di una scena con la telecamera del robot, i punti, caratterizzati da un’alta curvatura che chiameremo angoli, vengono
estratti da ogni immagine utilizzando l’algoritmo di Harris
[16]. Un numero massimo prefissato di punti viene estratto da
ogni immagine. Per ogni coppia di immagini i punti estratti sono
messi in corrispondenza utilizzando una procedura di matching.
Inizialmente viene applicata una tecnica di correlazione per stabilire i punti, tra due immagini, candidati ad essere in corrispondenza. Per ogni coppia di punti viene calcolata una probabilità di concordanza e, se questa probabilità supera una soglia prefissata,
viene stabilito il match. Inoltre per eliminare ogni ambiguità tra le
corrispondenze candidate viene calcolato il numero di corrispondenze candidate simili trovate in un intorno del match stabilito. La
somma di questi valori per tutti i match candidati definisce una
funzione energia. La minimizzazione di questa funzione energia
attraverso una tecnica di rilassamento risolve il problema dell’ambiguità [17]. Una volta determinata la corrispondenza degli
Figura 5 - (a) Tre immagini di una stessa zona acquisite da tre
punti di vista diversi. (b) I punti bianchi indicano gli inliers estratti
nella procedura di matching, durante la fase di ricostruzione
tridimensionale della scena
Conclusioni
In questo lavoro è stata proposta una soluzione tecnologica
per la fruizione di un sito archeologico non aperto al pubblico
per la sua struttura molto complessa e potenzialmente pericolosa. La soluzione proposta non solo garantisce l’incolumità
degli utenti, ma anche la sicurezza del sito dal rischio di danneggiamenti ed inquinamento.
Figura 6 - Modello 3D della scena della figura 5
Luglio-Agosto 2006 - Automazione e Strumentazione - 93
TECNICA robotica
L’utilizzo di un robot mobile, che naviga nella grotta acquisendo e inviando ad una stazione remota le immagini delle
zone di interesse ricche di disegni preistorici, sembra una
soluzione appropriata per la fruizione di tale sito archeologico nel rispetto dell’ambiente.
La costruzione di un tale sistema richiede lo sviluppo di diversi moduli. Due di questi sono stati descritti in questo lavoro:
il modulo per la costruzione di una mappa bidimensionale
della grotta e il modulo per la ricostruzione del modello tridimensionale di zone particolarmente interessanti.
Il primo costruisce la mappa utile per la navigazione del veicolo all’interno della grotta e per il suo posizionamento nei
pressi delle zone di interesse. Inoltre fornisce la struttura bidimensionale dei corridoi e degli ambienti che compongono
questo complesso sito.
Il secondo modulo costruisce il modello tridimensionale delle
zone dove sono presenti le pitture. Tali modelli VRML possono essere utilizzati off-line dagli utenti ed inoltre sono utili per
lo studio dei disegni, da parte degli esperti, all’interno del loro
contesto.
Le potenzialità di tali moduli sono state provate durante una
sessione sperimentale all’interno della “Grotta dei Cervi”.
Un sommario della sessione sperimentale è disponibile su un
video che mostra la costruzione della mappa planare attraverso l’uso del sensore laser, la locazione di alcune zone d’interesse ricche di pitture preistoriche e, infine, la ricostruzione
tridimensionale di una di queste zone [19].
Sebbene ci siano ancora alcuni limiti strutturali da risolvere,
la soluzione proposta sembra essere adatta all’obiettivo della
fruizione di un sito archeologico senza alcun intervento invasivo sullo stesso. Essa permette di migliorare la conoscenza di
questi siti collezionando grandi quantità di informazione
prima non disponibili agli esperti, rispettando gli inestimabili
tesori archeologici che questi siti conservano.
Bibliografia
[1] E. Malis, “Survey of vision-based robot control,” ENSIETA European Naval Ship Design Short Course, France 2002.
[2] R. Talluri, J.K. Aggarwal, “Position Estimation Techniques
for an Autonomous Mobile Robot - A Review,” The Handbook
of Pattern Recognition and Computer Vision, World Scientific
Publishing Co., pp. 769-801, Singapore 1993.
[3] K. Sugihara, “Some location problems for robot navigation using a single camera,” Computer Vision Graphics and
Image Processing, vol. 42, pp. 112-129, 1988.
[4] M. Betken, L. Gurvits, “Mobile Robot Localization Using
Landmarks,” IEEE Transactions On Robotics And
Automation, vol. 13, no. 2, pp. 251-263, 1997.
[5] T. D’Orazio, F.P. Lovergine, M. Ianigro, E. Stella, A.
Distante, “Mobile Robot Position Determination Using Visual
Landmarks.,” IEEE Transactions on Industrial Electronics,
vol. 41, no 6, pp. 654-662, 1994.
[6] K. Hashimoto, “Visual Servoing,” World Scientific, ISBN
981-02-1364-6, 1993.
94 - Automazione e Strumentazione - Luglio-Agosto 2006
[7] D.F. DeMenthon, L.S. Davis, “Model-based object pose in
25 lines of code,” International Journal of Computer Vision, vol.
15, n. 2, pp. 123-141, 1995.
[8] R. Basri, E. Rivlin, I. Shimshoni, “Visual homing: surfing
on the epipole,” International Journal of Computer Vision, vol.
33, n. 2, pp. 117-137, 1999.
[9] I. Lopez, A. Frangi, B. van der Wijst, H. Broers, “Pose
Estimation from 2D to 3D for Computer Vision in an Assembly
Node,” Technical Report CTB500-02-0000, Philips CFT,
Netherlands 2000.
[10] T. Gramegna, L. Venturino, G. Cicirelli, G. Attolico, A.
Distante, “Optimization of the Posit algorithm for indoor autonomous navigation,” Robotics and Autonomous Systems, vol.
48, n. 2-3, pp. 145-162, September 2004.
[11] T. Gramegna, L. Venturino, G. Cicirelli, G. Attolico, A.
Distante, “Autonomous robot navigation using uncalibrated
images,” 8th Conference on Intelligent Autonomous Systems, pp.
881-888, Netherlands 2004.
[12] L. Venturino, T. Gramegna, G. Cicirelli, G. Attolico, A.
Distante “Self positioning to observe prehistoric paints in a
cave,” Workshop Interazione e Comunicazione Visuale nei Beni
Culturali, Italy 2004, in stampa.
[13] J.K. Aggarwal, B.C. Vemuri, “3-D model construction
from multiple views and intensity data,” IEEE Conf. Computer
Vision and Pattern Recognition, pp. 435-437, Florida 1986.
[14] V. Sequeira, K. Ng, E. Wolfart, J.G.M. Gonçalves, D.C.
Hogg, “Automated Reconstruction of 3D Models from Real
Environments,” ISPRS Journal of Photogrammetry and
Remote Sensing, vol. 54, pp. 1-22, February 1999.
[15] L. Venturino, T. Gramegna, G. Cicirelli, G. Attolico, A.
Distante, “Improving 3D scene reconstruction through the application of geometric constraints”, 11th International Workshop on
Systems, Signals and Image Processing, Poland 2004, in stampa.
[16] C. Harris, M. Stephens, “A combined corner and edge
detector,” 4th Alvey Conference, pp. 147-151, 1988.
[17] Z. Zhang, R. Deriche, O. Faugeras, Q. Luong, “A robust
technique for matching two uncalibrated images trough the
recovery of the unknown epipolar geometry,” Technical report
N° 2273, Institut national de recherche en informatique et en
automatique, 1994.
[18] R.I. Hartley, “Kruppa’s equations derived from the fundamental matrix,” IEEE Transactions on pattern analysis and
machine intelligence, vol. 19, n. 2, pp. 133-135, February
1997.
[19] T. Gramegna, L. Venturino, M. Ianigro, G. Attolico, A.
Distante, “Archaeological cave fruition and 3D reconstruction
using a mobile robot,” 2005 International Conference on
■
Robotics and Automation, Spain 2005.
Ringraziamenti. Gli autori ringraziano Arturo Argentieri per il suo prezioso supporto tecnico. Un doveroso ringraziamento va anche all’Istituto
Italiano di Speleologia nonché al suo presidente Ninì Ciccarese per il supporto fornito durante l’esplorazione della grotta. Infine gli autori ringraziano la D.ssa Maria Antonietta Gorgoglione della Sovrintendenza dei
Beni Culturali.