UNIVERSITA’ DEGLI STUDI DI TRENTO
SCUOLA DI SPECIALIZZAZIONE ALL’INSEGNAMENTO SECONDARIO
INDIRIZZO SCIENTIFICO MATEMATICO FISICO INFORMATICO
classe A049 matematica e fisica
Unità didattica
ANATOMIA
DELLE
ONDE SONORE
Dott. Mario Sandri
Matricola 117039
Anno Accademico 2004/2005
Anatomia delle onde sonore
Mario Sandri
INDICE DEI CONTENUTI
Pagina 3
Destinatari
Pagina 3
Prerequisiti
Pagina 3
Accertamento dei prerequisiti
Pagina 4
Obiettivi
Pagina 4
Obiettivi generali
Pagina 4
Obiettivi trasversali
Pagina 5
Obiettivi specifici
Pagina 5
Conoscenze (obiettivi cognitivi)
Pagina 5
Competenze (obiettivi operativi)
Pagina 5
Capacità (obiettivi metacognitivi)
Pagina 6
Sviluppo dei contenuti
Pagina 6
Moto armonico semplice
Pagina 10
Esempio 1
Pagina 11
Esempio 2
Pagina 12
Smorzamento
Pagina 17
Pagina 18
Esempio
Modi normali di oscillazione trasversale delle corde a estremi fissi
Pagina 23
Esempio 1
Pagina 24
Esempio 2
Pagina 25
Metodologie didattiche
Pagina 25
Materiali e strumenti utilizzati
Pagina 26
Controllo dell’apprendimento
Pagina 26
Valutazione
Pagina 26
Recupero e approfondimento
Pagina 26
Tempi dell’intervento didattico
Pagina 27
Bibliografia
Pagina 2
Anatomia delle onde sonore
Mario Sandri
DESTINATARI
Questa unità didattica è rivolta a studenti del 5° anno del Liceo Scientifico, del Liceo scientifico
P.N.I. e degli istituti tecnici.
PREREQUISITI
•
Conoscere il concetto di derivata totale e parziale
•
Conoscenza delle funzioni trigonometriche
•
Saper calcolare le derivate
•
Conoscere i tre principi della dinamica
•
Conoscere le funzioni esponenziali
•
Saper fare calcoli letterari
•
Conoscere le relazioni tra spostamento, velocità e accelerazione
•
Conoscere un’equazione differenziale
•
Conoscere i fondamenti della fisica
•
Conoscere le funzioni in due variabili
ACCERTAMENTO DEI PREREQUISITI
Questa unità didattica prevede che l’alunno abbia completamente acquisito nelle unità didattiche
precedenti le conoscenze e le competenze sui concetti fondamentali della fisica e sulla relazione che
intercorrono tra le grandezze spostamento, velocità e accelerazione, nonché su concetti
fondamentali della matematica quali le funzione in più variabili, la trigonometria e le derivate.
Come accertamento dei prerequisiti si accettano i risultati delle verifiche sommative delle unità
didattiche precedenti, pur ritenendo necessario condurre una lezione dialogata, durante la quale
l’insegnante verifica ulteriormente le conoscenze ponendo alcune domande opportune.
Alcuni punti essenziali e di strategica importanza sono da rivedere, integrare e rinforzare in
classe, durante la prima ora dell’unità didattica, con modalità dialogica-interattiva. Gli studenti
carenti in determinati argomenti, saranno invitati, entro la successiva lezione, a rivedere le
tematiche in questione.
Pagina 3
Anatomia delle onde sonore
Mario Sandri
OBIETTIVI
Obiettivi generali
•
Acquisire le conoscenze, competenze e capacità previste dall’unità didattica per l’argomento
anatomia delle onde sonore
•
Contribuire a sviluppare e soddisfare l’interesse degli studenti per la fisica, in generale, e per
l’acustica, in particolare
•
Saper utilizzare consapevolmente procedure matematiche nell’ambito fisico
•
Riconoscere il contributo dato dalla fisica allo sviluppo delle scienze musicali
•
Migliorare l’abilità di lettura di grafici evidenziando in tal senso anche capacità critiche
•
Motivare gli alunni ad attività di studio teorico degli aspetti quotidiani della fisica
•
Contribuire a rendere gli studenti in grado di affrontare situazioni problematiche di natura
acustica avvalendosi nei modelli fisico-matematici più adatti alla loro rappresentazione
•
Condurre ad un appropriato utilizzo del lessico specifico della fisica e della musica e a saper
argomentare con proprietà di espressione e rigore logico
•
Sviluppare il senso critico e la capacità di correggere errori
•
Acquisire un’adeguata conoscenza e comprensione dei contenuti proposti insieme alla
consapevolezza del proprio stile di apprendimento
•
Possedere e migliorare il metodo di studio
•
Abituare ad un metodo autonomo di lavoro, consolidando la capacità progettuale ed
organizzativa
Obiettivi trasversali
•
Educare gli alunni ad un comportamento corretto e responsabile verso compagni ed
insegnanti e al rispetto reciproco nei rapporti interpersonali
•
Sviluppare attitudine alla comunicazione favorendo lo scambio di opinioni tra docente e
allievo e tra allievi
•
Proseguire ed ampliare il processo di preparazione scientifica e culturale degli studenti
•
Contribuire a sviluppare lo spirito critico e l’attitudine a riesaminare criticamente ed a
sistemare logicamente le conoscenze acquisite
Pagina 4
Anatomia delle onde sonore
Mario Sandri
Obiettivi specifici
Conoscenze (obiettivi cognitivi)
•
Conoscere la relazione tra le diverse forze applicate ad un sistema
•
Conoscere le leggi che governano il moto ondoso
•
Conoscere i parametri fondamentali che caratterizzano le onde
•
Conoscere l’equazione di un’onda
•
Conoscere il significato fisico di grandezze comunemente adottate nel gergo
musicale
Competenze (obiettivi operativi)
•
Saper determinare la frequenza di oscillazione di oscillatore armonico
•
Saper determinare le caratteristiche principali di un’onda
•
Saper determinare il tipo di smorzamento subito da un’onda
•
Saper determinare la frequenza di oscillazione di una corda vibrante
•
Saper determinare il tipo di armonica di una corda vibrante
Capacità (obiettivi metacognitivi)
•
Riconoscere la stretta analogia tra fisica e musica
•
Acquisire la capacità di leggere ed interpretare fenomeni del mondo reale e fisico,
applicando le competenze fisico-matematiche acquisite
•
Saper utilizzare le conoscenze e le competenze acquisite per risolvere problemi
•
Essere in grado di riconoscere in contesti diversi la presenza di propagazione di tipo
ondoso ed essere in grado di trarre informazioni sul fenomeno che rappresentano,
utilizzando le conoscenze e competenze acquisite.
Pagina 5
Anatomia delle onde sonore
Mario Sandri
SVILUPPO DEI CONTENUTI
MOTO ARMONICO SEMPLICE
Un moto oscillatorio o vibrazionale è un moto a carattere ripetitivo, di cui si può definire un
periodo. Esiste la possibilità di tale moto ogni qualvolta esiste una forza di richiamo che tende a
riportare il sistema perturbato verso la sua posizione di equilibrio. Tra i casi più importanti
ricordiamo quelli in cui agisce una forza gravitazionale, come nel pendolo, o elastica, come nelle
molle, o elettrica, come negli orologi, o magnetica, come nelle bussole.
Consideriamo ora un corpo di massa m [kg] collegato ad una parete da una molla di costante
elastica k [N/m] e lunghezza a riposo l [m]. Facciamo in modo di prendere un corpo di massa molto
maggiore rispetto a quella della molla così da poter escludere ques’ultima. Per semplicità
supponiamo che non vi sia la presenza di attrito e che il moto avvenga in una direzione. La
posizione di equilibrio si ha quando il corpo si trova a distanza l dalla parete, cioè la molla non è né
in trazione né in compressione. Se ora spostiamo il corpo dalla posizione di equilibrio il corpo
subisce una forza che lo tende a riportare nella posizione di equilibrio come da figura. A seguito di
questa perturbazione l’effetto che si osserva è una oscillazione attorno alla posizione di equilibrio.
Pagina 6
Anatomia delle onde sonore
Mario Sandri
Tale forza di richiamo è espressa dalla legge di Hooke:
JG
G
F e = −k x
G
dove x ( t ) è il vettore spostamento e dipende dal tempo. Il segno meno deriva dal fatto che la forza
elastica è, appunto, una forza di richiamo e dunque è diretta in senso contrario rispetto alla
G
deformazione x ( t ) . Per il secondo principio della dinamica (o legge di Newton) il moto corpo è
descritto anche dalla seguente equazione:
G
JG
G
d2x
F = ma = m 2
dt
G
G d2x
dove a = 2
dt
è il vettore accelerazione. Non essendoci altre forze in gioco, si deriva
JG JG
immediatamente che F e = F e dunque risulta:
G
G
d2 x
m 2 = −k x
dt
che riscritto in una dimensione diventa:
m
d 2x
= −kx
dt 2
Senza perdere in generalità possiamo scrivere l’equazione in questa maniera:
d 2x
+ ω02 x = 0
2
dt
dove ω0 =
k
[rad/s] è la pulsazione del moto e dipende unicamente da proprietà intrinseche della
m
molla e dell’oggetto. L’equazione precedente è quella generale per un oscillatore armonico
unidimensionale con pulsazione assegnata. La soluzione di questa equazione, in regime di piccole
oscillazioni come nel caso in esame, è un’onda la cui espressione è la seguente:
Pagina 7
Anatomia delle onde sonore
Mario Sandri
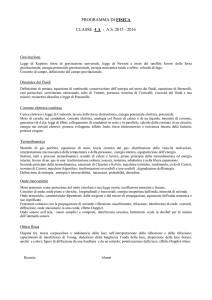
x ( t ) = A cos (ω0t + ϕ )
dove A [m] rappresenta l’ampiezza dell’onda e φ [rad] la fase iniziale. Questi due parametri devono
essere determinati dalle condizioni iniziali. Da tale soluzione possiamo ricavarci l’espressione per la
velocità e per l’accelerazione ricordando come queste due quantità sono legate alla posizione:
v (t ) =
dx
= − Aω0 sin (ω0t + ϕ )
dt
d 2x
a ( t ) = 2 = − Aω02 cos (ω0t + ϕ ) = −ω02 x ( t )
dt
I parametri A e φ ora possono essere facilmente trovati imponendo le condizioni iniziali sulla
posizione e sulla velocità:
x (t = 0) = l
v ( t = 0 ) = v0
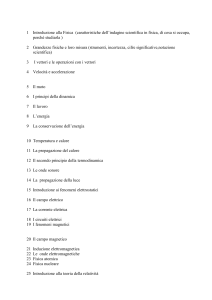
La figura mostra l’andamento, in funzione del tempo, della posizione, velocità e accelerazione del
corpo.
20
15
10
5
0
0
2
4
6
8
10
12
-5
-10
-15
-20
Tempo (s)
x(t)
v(t)
Pagina 8
a(t)
14
16
18
20
Anatomia delle onde sonore
Analizziamo
ora
Mario Sandri
alcune
caratteristiche
riguardanti
le
proprietà
dell’onda
trovata.
Precedentemente è stata vista la relazione tra la pulsazione dell’onda e le proprietà intrinseche e
misurabili del sistema. Ora osserviamo alcune qualità specifiche tipiche di ogni onda quali il
periodo T [s] e la frequenza f [Hz]:
T=
f =
2π
= 2π
m
k
1
1
=
T 2π
k
m
ω0
L’espressione trovata mostra che la frequenza cresce quanto più la molla è rigida, cioè quanto è più
grande è k, e diminuisce quanto è più grande la massa m (effetto di inerzia). Va sottolineato che il
sistema ha una sola frequenza di oscillazione spontanea, ossia non forzata da stimoli periodici
interni, la frequenza propria o di risonanza.
Facendo alcune considerazioni energetiche, l’energia totale H [J] associata all’oscillazione è la
somma dell’energia cinetica EC [J], dovuta al movimento dell’oggetto, e di quella potenziale
elastica EP [J], associata alla deformazione della molla rispetto alla posizione di equilibrio. In
formule possiamo esprimere questa relazione nel seguente modo H = EC + EP e dunque la sua
espressione risulta essere pari a:
H=
1 2 1 2 1
1
mv + kx = mA2ω02 sin 2 (ω0t + ϕ ) + kA2 cos 2 (ω0t + ϕ )
2
2
2
2
L’energia totale risulta essere costante in quanto non subentrano fenomeni di dissipazione e dunque,
nel caso perfettamente ideale, l’energia, durante ogni oscillazione, si converte tutta da potenziale a
cinetica e viceversa, senza decadere.
Pagina 9
Anatomia delle onde sonore
Mario Sandri
ESEMPIO 1
Dato un oggetto di massa pari a 3 kg e costante elastica pari a 2 N/m, calcolare la posizione, la
velocità e l’accelerazione dell’oggetto dopo un periodo di 10 s, sapendo che la lunghezza a riposo
della molla è pari a 4 cm e la velocità iniziale del corpo è di 0,2 m/s.
Risoluzione
Il problema così espresso si presenta ad una facile risoluzione. Applicando le regole viste
precedentemente, ricaviamo inizialmente la pulsazione del moto:
ω0 =
k
2
=
= 0,82 rad / s
m
3
e poi i parametri A e φ dalle condizioni iniziali. Nell’istante iniziale abbiamo le seguenti relazioni:
x ( t = 0 ) = A cos ϕ = 0, 04 m
v ( t = 0 ) = 0,82 A sin ϕ = 0, 2 m / s
Facendo il rapporto tra le due equazioni si ricava:
tan ϕ =
sin ϕ
0, 2
=
= 6, 09
cos ϕ 0, 04 ⋅ 0,82
da cui φ risulta essere pari a 1,41 rad. Inserendo poi tale risultato nella prima delle due equazioni
precedenti si ottiene che A vale 0,25 m. Ricavati i parametri incogniti possiamo inserirli nelle
formule generali e otteniamo:
x ( t = 10 s ) = 0, 25 ⋅ cos ( 0,82 ⋅10 + 1, 41) = −0, 24 m = −24 cm
v ( t = 10 s ) = −0,82 ⋅ 0, 25 ⋅ sin ( 0,82 ⋅10 + 1, 41) = 0, 03 m / s = 3 cm / s
a ( t = 10 s ) = −0,822 ⋅ 0, 25 ⋅ cos ( 0,82 ⋅10 + 1, 41) = 0,16 m / s 2 = 16 cm / s 2
Pagina 10
Anatomia delle onde sonore
Mario Sandri
ESEMPIO 2
Determinare che caratteristiche deve avere un sistema massa-molla per avere la frequenza di
risonanza pari ad un La a 440 Hz.
Risoluzione
Dalla definizione di frequenza: f =
1
2π
k
è possibile ricavare la relazione che intercorre tra la
m
costante elastica della molla e la massa dell’oggetto ancorato. In formule si ottiene:
k = ( 2π f ) m
2
Ponendo ad esempio una costante elastica pari a 10 N/m si ricava una massa di 1,3 mg.
Tali valori ci indicano come sia difficile, ma non impossibile, ricavare una frequenza di oscillazione
così elevata con un sistema massa-molla. Le formule suggeriscono invece come sia molto più
facilmente ottenibile un sistema che oscilla alla frequenza dell’ordine dell’Hertz. Infatti per ottenere
una frequenza di 1 Hz basta utilizzare una massa di 0,1 kg e una costante elastica di 3,95 N/m.
Pagina 11
Anatomia delle onde sonore
Mario Sandri
SMORZAMENTO
Il caso precedente è un caso ideale in cui l’energia si conserva. Nella pratica questo però non
avviene in quanto ci sono forze dissipative che tendono a far smorzare il moto. Nel caso che si
andrà ad esaminare, per semplicità, si considererà come punto di partenza il caso visto in
precedenza con l’aggiunta dell’attrito dovuto al mezzo in cui l’oggetto si trova ad oscillare.
La forza di attrito viscoso che si genera a causa del moto del corpo è data da:
JJG
G
Fa = −γ v
dove γ [kg/s] è il coefficiente di attrito viscoso. Continua a sussistere la forza di Hooke e anche in
questo caso deve valere la legge di Newton che si può esprimere in questa maniera:
JG JJG JG
F e + Fa = F
Passando direttamente al caso unidimensionale e con piccoli passaggi matematici si ottiene la
seguente espressione:
m
d 2x
dx
+γ
+ kx = 0
2
dt
dt
che viene comunemente scritta in questo modo:
Pagina 12
Anatomia delle onde sonore
Mario Sandri
d 2 x 1 dx
+
+ ω02 x = 0
2
τ dt
dt
dove ω0 =
k
m
rappresenta la pulsazione caratteristica del sistema e τ =
[s] è il tempo di
m
γ
smorzamento del sistema. La precedente equazione ammette una soluzione generale del tipo:
x ( t ) = Aeα1t + Beα 2t
dove A e B sono due costanti determinate dalle condizioni iniziali, mentre α1 e α2 sono le soluzioni
dell’equazione algebrica associata:
1
α 2 + α + ω02 = 0
τ
che presenta due radici di espressione pari a:
α =−
Se si chiama ∆ =
1
1
±
− ω02
2
2τ
4τ
1
− ω02 [rad2/s2] si possono ottenere tre casi distinti.
2
4τ
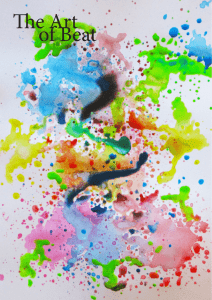
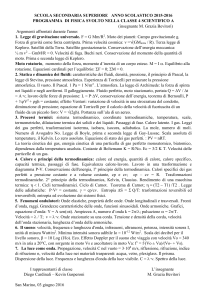
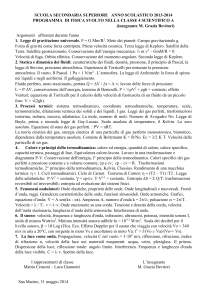
1. Caso: moto armonico sottosmorzato
Questo è il caso in cui ∆ < 0 e la soluzione assume la seguente espressione:
x ( t ) = Ae
−
t
2τ
cos (ωs t + ϕ )
dove A e φ sono da determinare con le condizioni iniziali e ωs = ω02 −
Pagina 13
1
[rad/s]
4τ 2
Anatomia delle onde sonore
Mario Sandri
4
3
Posizione (m)
2
1
0
0
10
20
30
40
50
60
70
-1
-2
-3
Tempo (s)
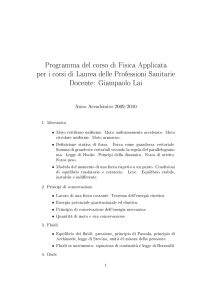
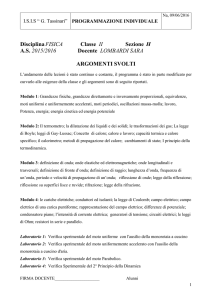
2. Caso: smorzamento critico
Si ottiene questo moto quando ∆ = 0 e il moto presenta la seguente espressione:
x (t ) = e
−
t
2τ
( B + Dt )
Dove B e D sono due costanti che si ricavano dalle condizioni iniziali.
Pagina 14
80
Anatomia delle onde sonore
Mario Sandri
3,5
3
Posizione (m)
2,5
2
1,5
1
0,5
0
0
5
10
15
20
25
Tempo (s)
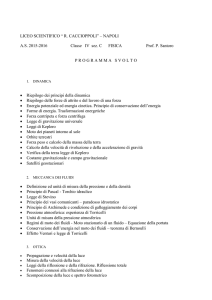
3. Caso: moto armonico sovrasmorzato
Tale situazione si verifica quando ∆ > 0 e la soluzione assume la seguente forma:
x ( t ) = C1et
∆
+ C2 e − t
∆
dove anche in questo caso C1 e C2 sono due costanti da determinare con le condizioni
iniziali.
Pagina 15
Anatomia delle onde sonore
Mario Sandri
3,5
3
Posizione (m)
2,5
2
1,5
1
0,5
0
0
5
10
15
20
25
Tempo (s)
Ovviamente il caso che maggiormente interessa è quello sottosmorzato in cui oltre al normale moto
armonico vi è un fattore esponenziale che fa decrescere il segnale. Questo è il caso che ci
aspettiamo che si verifichi quando si ha a che fare con onde sonore che decadono inevitabilmente.
Facendo alcune considerazione sull’energia in gioco, essendoci una forza dissipativa, l’energia
totale non si conserva e dunque si ottiene una variazione di energia meccanica pari a:
dH
= −γ v 2
dt
Questo avviene perché l’energia, originariamente propria del sistema oscillante, si trasferisce
all’ambiente generando onde meccaniche che possono propagarsi a distanza anche sotto forma di
suono. Tale accoppiamento tra sistema oscillante e mezzo ambiente è pertanto essenziale per la
trasmissione a distanza dell’energia meccanica e dunque, in particolare, di quella acustica.
Pagina 16
Anatomia delle onde sonore
Mario Sandri
ESEMPIO
Dato un sistema di un oggetto di massa 5 kg incernierato ad una parete con una molla di
costante elastica pari a 3 N/m, soggetto ad un attrito viscoso dell’aria pari a 1,5 kg/s e spostato dalla
posizione di equilibrio per una lunghezza pari a 0,3 m, determinare il tipo di moto e i suoi parametri
caratteristici.
Risoluzione
Innanzitutto vediamo il valore di τ e ω0 utilizzando le formule precedentemente viste:
τ=
ω0 =
m
γ
=
5
= 3.3 s
1,5
k
3
=
= 0.77 rad / s
m
5
Ora è possibile calcolare il ∆ e da esso determinare il tipo di moto:
∆=
1
1
− ω02 =
− 0, 77 2 = −0, 49 rad 2 / s 2
2
2
4τ
4 ⋅ 3,3
dato che tale parametro assume un valore negativo, allora se ne può dedurre che il moto è
sottosmorzato e dunque vi è la propagazione di un’onda. L’altro parametro importante del sistema
è:
ωs = ω02 −
1
= −∆ = − ( −0, 49 ) = 0, 7 rad / s
4τ 2
Pagina 17
Anatomia delle onde sonore
Mario Sandri
MODI NORMALI DI OSCILLAZIONE TRASVERSALE DELLE CORDE A ESTREMI
FISSI
Un’onda si dice trasversale se il moto delle particelle del mezzo si sviluppa in direzione
perpendicolare alla direzione di propagazione. Il mezzo di sostegno di un’onda trasversale può
essere schematizzato come una sequenza di oscillatori armonici vincolati a muoversi ad esempio
lungo l’asse y, e collegati tra loro da molle. Lo spostamento verticale di uno degli oscillatori e il
successivo rilascio provoca la trasmissione del suo stato di moto oscillatorio agli oscillatori
accoppiati adiacenti. La propagazione avviene nella direzione dell’asse x, mentre il moto delle
particelle avviene lungo l’asse y.
Dal caso di molte masse discrete alla distribuzione continua di masse, che ad esempio forma una
corda musicale il passo è breve. La corda è costituita da molecole tenute assieme da forze
intermolecolari di varia natura, ad esempio dall’attrazione di origine elettrostatica. Il loro
comportamento, almeno per piccole deformazioni, può essere molto ben assimilato a quello di forze
elastiche. Si consideri allora una corda sottile e omogenea di lunghezza L [m] ancorata ai suoi due
estremi, e si scelga l’asse z parallelo alla configurazione rettilinea che la corda assume a riposo in
JG
virtù della tensione T [N] ad essa applicata. Si trascurino per semplicità gli attriti. Sia inoltre
ρ=
dm
[kg/m] la densità lineare della corda. Prendiamo in esame la dinamica del tratto di corda
dz
compreso tra z e z + dz la cui massa è dm = ρ dz [kg] e che, all’istante t [s], è spostata
trasversalmente di una quantità S ( z, t ) [m] perpendicolarmente all’asse z. Per la definizione di
tensione del filo, gli effetti dinamici esercitati sul tratto dz dalla parte rimanente della corda possono
JG
JG
essere schematizzati tramite le due forze T ( z ) e T ( z + dz ) applicate ai due estremi A e B del tratto
considerato. A causa della curvatura del tratto AB le due tensioni, pur uguali in modulo, non si
equilibrano perché non hanno stessa direzione.
Pagina 18
Anatomia delle onde sonore
Mario Sandri
Applichiamo ora la legge di Newton alla coordinata perpendicolare all’asse z, cioè lungo lo
spostamento S ( z, t ) , e otteniamo:
∂2S
dm ⋅ a = ρ dz 2 = T sin (θ + dθ ) − T sin (θ )
∂t
In pratica, l’angolo θ è sempre molto piccolo per cui si potrà scrivere:
ρ
∂2S
dz = T (θ + dθ ) − Tθ = Tdθ
∂t 2
D’altra parte l’angolo θ non è altro che la pendenza della curva S ( z, t ) a t costante riportata in un
diagramma cartesiano di ascissa z e cioè:
θ tan θ =
∂S
∂z
e differenziato rispetto a z risulta:
dθ =
∂θ
∂2S
dz = 2 dx
∂z
∂x
Pagina 19
Anatomia delle onde sonore
Mario Sandri
Utilizzando questa espressione e inserendola nella formula di partenza si trova:
∂2S T ∂2S
=
∂t 2 ρ ∂z 2
L’equazione precedente è chiamata equazione d’onda la cui soluzione generale è del tipo:
S ( z , t ) = A ( z ) cos (ω t + ϕ )
Tale espressione è formalmente simile a quella dell’oscillatore armonico, tuttavia in tale caso
l’ampiezza non risulta essere più costante, ma dipendente dalla posizione. Con pochi passaggi
matematici è possibile ottenere la seguente equazione che descrive il comportamento del fattore
A ( z ) in funzione di z:
d 2 A( z )
ρ
= − ω2 A( z )
2
dz
T
che è a tutti gli effetti l’equazione di un oscillatore armonico nella posizione, la cui soluzione è del
tipo:
A ( z ) = A cos ( k z + α )
dove A e α sono costanti da determinare con le condizioni iniziali, mentre k è il vettore d’onda e
vale k =
2π
λ
[m-1] dove λ [m] rappresenta la lunghezza d’onda. Con facili passaggi matematici si
giunge alla seguente espressione che lega la pulsazione al vettore d’onda:
ω=k
T
ρ
Da considerazioni del tutto indipendenti al contesto in cui si sta lavorando è possibile trovare la
relazione generale tra questi due parametri che viene detta relazione di dispersione:
Pagina 20
Anatomia delle onde sonore
Mario Sandri
ω
k
=
2π f
=λf
2π / λ
Ora è possibile trovare il valore di alcuni parametri. Si ha che S ( 0, t ) = S ( L, t ) = 0 e da ciò si
ottiene:
sin α = 0
sin kL = 0
La prima equazione ammette soluzione per α = 0 , mentre la seconda per kL = nπ
con
n = 0, ±1, ±2,... . Da quest’ultima si ottiene che il vettore d’onda può assumere solo valori discreti
pari a:
kn =
nπ
L
Da tale parametro possiamo ricavarci tutti gli altri:
ωn =
nπ
L
fn =
n T
2L ρ
λn =
T
ρ
2L
n
La legge e le relazioni trovate tuttavia non sono applicabili per n troppo grandi.
I modi normali di oscillazione di una corda vibrante sono detti parziali o armoniche della corda:
quello di minima frequenza è l’armonica fondamentale, o tono, i successivi le armoniche superiori,
o iperoni. Come si vede dalle relazioni precedenti, in linea di principio una corda vibrante a estremi
fissi possiede infiniti modi normali.
La figura indica che l’oscillazione massima avviene ai ventri: al trascorrere del tempo, questi
passano da un estremo positivo ad uno negativo, come suggerito nel disegno dalle curve continua e
Pagina 21
Anatomia delle onde sonore
Mario Sandri
tratteggiata. Vi sono punti che non si muovono e vengono detti nodi. Due nodi sono inevitabilmente
presenti agli estremi fissati della corda.
Da relazioni generali riguardanti le onde si conosce la relazione che intercorre tra la lunghezza
d’onda e la frequenza λ f = v in cui v [m/s] è la velocità dell’onda nel mezzo. Da tali relazioni si
ottiene che la velocità dell’onda nel caso considerato è:
v=
T
ρ
Pagina 22
Anatomia delle onde sonore
Mario Sandri
ESEMPIO 1
Dato uno strumento a corda, vogliamo che una sua corda di lunghezza pari ad 1 m abbia una
frequenza fondamentale di un La e cioè 440 Hz. Determinare la densità lineare e la tensione della
corda. Calcolare inoltre il vettore d’onda, la pulsazione,la lunghezza d’onda e la velocità dell’onda.
Risoluzione
Dalla definizione di frequenza f n =
n T
è possibile ricavare la relazione che intercorre tra la
2L ρ
tensione e la densità lineare. Si ricordi che per l’armonica fondamentale si ha n = 1. Da ciò si
ricava:
T = ( 2 Lf1 ) ρ
2
Ponendo ad esempio una densità lineare pari a 0,001 kg/m si ottiene una tensione pari a 774,4 N.
Valutiamo ora gli altri parametri in gioco:
k1 =
ω1 =
π
T
L
ρ
=
π
L
π
1
=
π
1
= 3,14 m −1
774, 4
= 2764, 6 rad / s
0, 001
λ1 = 2 L = 2 ⋅1 = 2 m
v=
T
ρ
=
774, 4
= 880 m / s
0, 001
Pagina 23
Anatomia delle onde sonore
Mario Sandri
ESEMPIO 2
Utilizzando come punto di partenza l’esempio precedente, calcolare i parametri fondamentali
per la quinta armonica.
Procedimento
La quinta armonica è caratterizzata dall’avere n = 5 e dunque basterà sostituire nelle formule
generali i parametri già trovati precedentemente. Fatto ciò si ottiene:
k5 =
ω5 =
nπ
L
f5 =
T
ρ
nπ 5π
=
= 15, 7 m −1
1
L
=
5π
1
774, 4
= 13823, 0 rad / s
0, 001
5 774, 4
n T
=
= 2000 Hz
2 L ρ 2 ⋅1 0, 001
λ5 =
2 L 2 ⋅1
=
= 0, 4 m
n
5
Pagina 24
Anatomia delle onde sonore
Mario Sandri
METODOLOGIE DIDATTICHE
Le strategie didattiche che si intendono adottare sono prevalentemente la lezione frontale,
limitata ad una breve parte dell’ora di lezione per sfruttare al meglio i tempi di attenzione, la lezione
interattiva che stimoli gli allievi a porre e a porsi domande, a collegare situazioni e a ricercare
soluzioni.
Per la presentazione dei nuovi contenuti e per lo svolgimento di esercizi significativi si farà uso
di lezioni frontali; per la risoluzione di ulteriori esercizi in collaborazione insegnate-allievi si farà
uso invece di lezioni dialogiche, con lo scopo di coinvolgere gli studenti nella realizzazione delle
lezioni, sollecitandoli con opportune domande. I momenti di lezione frontale e dialogica non
saranno rigidamente distinti, ma si potranno alternare nell’ambito della stessa ora di lezione. Alla
presentazione di ogni nuovo concetto o metodo di risoluzione di problemi, seguirà lo svolgimento
di esempi numerici. Talvolta sarà più opportuno partire da esempi significativi per giungere alla
formulazione di proprietà generali. Inoltre la correzione in classe degli esercizi farà da spunto per
nuove riflessioni e argomentazioni.
Una parte del monte ore dedicato alla seguente unità didattica verrà affrontata nel laboratorio di
informatica, dove gli studenti creeranno e poi utilizzeranno un programma compilato con Microsoft
Excel che illustrerà loro il comportamento di un moto armonico in funzione dei parametri
caratteristici e quello di un moto sforzato.
MATERIALI E STRUMENTI UTILIZZATI
•
Lavagna, gessi colorati
•
Libro di testo. Questo strumento dovrà presentare un linguaggio adeguato all’età,
evidenziare i nodi concettuali evitando nel contempo pericolose banalizzazioni, sostenere
uno studio individuale e le attività in classe. Il testo andrà usato in modo critico, adattandolo
ed eventualmente semplificandolo, cercando un punto di contatto tra gli obiettivi della
programmazione in classe e le abilità possedute dagli alunni. La difficoltà di un testo può
essere legata ai contenuti, alle operazioni cognitive, agli aspetti linguistici o agli aspetti
grafici. Per questo motivo, spesso emerge la necessità di completare, ridurre, schematizzare
ed evidenziare quanto contenuto nel testo.
•
Personal computer. Sarà indispensabile che ogni alunno abbia la possibilità di lavorare su un
singolo PC per evitare che alcuni ragazzi non lavorino affatto. Sarà importante verificare la
loro conoscenza del programma Microsoft Excel. A seguito di possibili carenze verrà inoltre
aggiunto un piccolo intervento di recupero.
Pagina 25
Anatomia delle onde sonore
Mario Sandri
CONTROLLO DELL’APPRENDIMENTO
L’insegnante potrà valutare l’andamento dell’attività didattica e controllare la comprensione
dell’argomento da parte degli alunni attraverso verifiche formative costituite da esercizi mirati, di
difficoltà crescente, da svolgere a casa. Tali esercizi saranno successivamente discussi in classe,
puntando principalmente su quelli in cui gli studenti hanno riscontrato maggiori difficoltà.
VALUTAZIONE
La valutazione dell’apprendimento si attua attraverso prove orali.
RECUPERO E APPROFONDIMENTO
Si prevedono attività di recupero per integrare e completare l’attività didattica. L’insegnamento
è in ogni caso orientato alla continua ripresa degli argomenti su cui gli studenti incontrano maggiori
difficoltà. Gli argomenti da recuperare sono individuati attraverso le prove orali. Le forme di
recupero previste sono:
•
Recupero svolto in classe attraverso la ripresa di concetti non ben assimilati e lo
svolgimento di esercizi chiarificatori;
•
Attività pomeridiane con gli studenti interessati (“sportello” e ”ascolto didattico”);
•
Assegnazione allo studente di esercizi mirati alla difficoltà da recuperare e guidati nella
risoluzione.
TEMPI DELL’INTERVENTO DIDATTICO
Viene proposta una descrizione del susseguirsi delle attività didattiche con i tempi necessari a
ciascuna attività. Questa proposta va comunque considerata in maniera elastica, in quanto l’attività
dipende molto dalle esigenze degli studenti.
Accertamento dei prerequisiti
1h
Moto armonico semplice
1h
Esempi ed esercizi
1h
Smorzamento
1h
Esempi ed esercizi
1h
Modi normali di oscillazione trasversale delle corde ad estremi fissi
1h
Esempi ed esercizi
1h
Attività di laboratorio informatico
2h
Pagina 26
Anatomia delle onde sonore
Mario Sandri
Prove orali
BIBLIOGRAFIA
A. Frova, FISICA E MUSICA, Zanichelli
A. Caforio, A. Ferilli, PHYSICA vol.1, Le Monnier
A. Caforio, A. Ferilli, PHYSICA vol.2, Le Monnier
C. Mencuccini, V. Silvestrini, FISICA I, Liquori Editore
Pagina 27