FISICA MATEMATICA
F. CARDIN — M. Favretti
Un giorno Hyakujō era a passeggio con il suo maestro Bashō.
Sopra le loro teste passò uno stormo di anatre selvatiche:
Bashō chiese: “Cosa sono?” “Anatre!” — rispose Hyakujō. “E
dove sono andate?” chiese Bashō. “Sono volate via.” “Come?
—sbottò Bashō pigliando per il naso Hyakujō e torcendoglielo
fortissimo— come avrebbero potuto volare via?” A quelle
parole, Hyakujō giunse al satori.
Aneddoto Zen
INTRO (ma va riscritta) La Meccanica Classica (nel seguito MC) ha avuto una storia
lunga e il cammino volto ad assiomatizzarla nel modo corretto è stato tortuoso: oggetto
del nostro studio (prembolo, si spera, ad approfondimenti meno edulcorati) sarà una
porzione ridotta del vasto terreno di indagine di questa disciplina. Si vuol porre l’accento, in buona sostanza, sulla precisa correlazione che esiste tra il problema (trovare un
modello standard per la MC) e la sua soluzione (sviluppare la Matematica adatta a descriverla). Ragioni storiche, filosofiche, o semplici coincidenze hanno portato i pionieri
della materia (Lagrange, Dirichlet, ma anche Eulero, Gauss) a formulare le idee che incontreremo e che poi sono culminate in lavori poderosi e omnicomprensivi: basti solo
pensare alla Méchanique Celeste di Laplace, summa tecnica e filosofica della concezione
del mondo.
L’Universo che avremo a mente sarà quello newtoniano pre-relativistico, dotato di un
Dio orologiaio (che cioè può –e lo permette a noi– dividere il tempo in intervalli arbitrariamente piccoli) che fa largo uso dell’invarianza galileiana: tale assunto è impreciso,
ma per nulla banale.
Nel seguito si daranno per scontati (l’extensor n’a pas du temps) molti concetti di Algebra Lineare, Geometria e Analisi, che comunque dovrebbero essere “patrimonio comune
a ogni persona istruita”.
Spazi Cinematici e Inerziali L’ambiente di lavoro più naturale atto a descrivere l’Universo scelto è uno spazio euclideo E3 (R) dotato di una base ortonormale equiorientata,
cioè di un prodotto scalare. I punti dello spazio
P assumono allora naturalmente delle
coordinate in tale base {e1 , e2 , e3 } tale che v = v1 ei , per ogni v ∈ E3 (R).
Ricordiamo (sarà utile in seguito averli a mente) due risultati:
Teorema di Parseval. Se V = {e1 , . . . , en } è base ortogonale di Rn e due vettori v, w che
in E hanno coordinate v = (x i ), w = ( yi ), in V si scrivono come v = (x i′ ), w = ( yi′ ),
P3
P3
P3
allora il loro prodotto scalare è i=1 x i yi = i=1 x i′ yi′ = i=1 (v · ei )(w · ei )
Teorema sulle basi ON. Se E = {e1 , . . . , en } è una base ortonormale di En (R) ogni
P3
vettore v si scrive in modo unico come v = i=1 (v · e j )e j
1
FISMAT 2008/2009
La dimostrazione di ambo questi fatti è facile, o comunque vive in ogni buon libro di
Algebra Lineare.
Spazi con questa struttura si dicono Spazi Cinematici. Da questo vasto sottoinsieme
però, è utile isolarne uno proprio, più ristretto. Tale spazio è detto Spazio Inerziale, perchè la sua struttura realizza quello che è il classico “principio di inerzia” galileiano: una
particella dinamicamente isolata –il cui moto sia cioè libero da interazioni dinamiche con
altre particelle– si muove di moto rettilineo uniforme1 . Gli spazi inerziali godono, rispetto ad altri, del seguente privilegio. In virtù del principio di inerzia un moto rettilineo
osservato nel sistema di riferimento R = Ox yz è osservato nello stesso modo nel sistema R ′ = O′ x ′ y ′ z ′ (in altre parole i due riferimenti sono identici a meno di traslazioni:
l’insieme dei sistemi inerziali è invariante sotto l’azione del gruppo Tras(R3 )).
Come detto, il tempo che si utilizza in questo modello è quello newtoniano, slegato dalla rappresentazione che si ha dello spazio. Questo “insieme di istanti” ordinati
e dotato di intervalli infinitamente suddividibili si modellizza naturalmente come una
retta affine euclidea. Fissato un versore τ ogni istante di tempo è identificato dalla sola
coordinata t di modo che t = tτ.
OSSERVAZIONE. I cambi di riferimento per lo spazio restano allora ben separati da quelli
adottati per un cambio di riferimento temporale: dei primi ci occuperemo diffusamente,
per i secondi bastando la sola azione del sunnominato gruppo di traslazione su R; in
buona sostanza l’“oggetto” geometrico che tratteremo sarà del tipo Rk × R, ove k è un
multiplo di 3 (si vedrà, tra pochissimo, perchè).
Gli oggetti che abitano lo spazio che siamo andati definendo sono punti dotati di
massa: su entrambe le nozioni (quella di punto, entità astratta di dimensione nulla, privo
di struttura interna, omogeneo ad ogni altro, e quella di massa, “etichetta” numerica –
reale, strettamente positiva, dato che oggetti di massa nulla sono assenti a tutti gli effetti
dal sistema– da assegnare ad un determinato punto) non insisteremo con pretese di
eccessivo rigore: le idee di punto e di massa saranno pensate come primitive nella mente
dei lettori.
Disponendo allora di un insieme di n punti materiali in E3 , {M1 , . . . , Mn } di masse
m1 , . . . , mn (insieme che sarà detto sistema meccanico), definiremo come spazio delle configurazioni (o spazio delle fasi) del sistema il massimo sottoinsieme S in cui è possibile
assegnare ai punti delle coordinate (OP1 , . . . , OPn ) ∈ R3 × · · · × R3 = R3n .
L’esempio più semplice di spazio delle configurazioni di un dato sistema si trova quando i punti sono liberi (o anche privi di vincoli), cioè quando S = R3n . Ai punti è poi possibile applicare (se ne vogliamo studiare il moto) dei vettori velocità (che sono in sostanza
vettori di A3 : la funzione che associa ogni punto al suo vettore velocità è un oggetto particolarmente raffinato il cui studio affronteremo diffusamente). Questa nuova nozione si
traduce nell’identificare il sistema con due n-uple di trivettori (OP1 , . . . , OPn ), (v1 , . . . , vn ):
1
E non è il caso di precisare come la stasi sia un caso particolare di moto uniforme, preisamente quello
di velocità nulla.
2
FISMAT 2008/2009
lo spazio risultante, di dimensione doppia, si dice spazio degli atti di moto del sistema.
Nel caso di n punti materiali liberi da vincoli, tale spazio coincide con R6n .
L’ultimo oggetto da descrivere è la forza: essa sarà per noi una funzione
Fi : R × R3n × R3n −→ R3
che rappresenta, nel dato istante t, l’interazione della i–esima particella con le altre
n − 1 e con le loro velocità. Non mancano esempi che incarnino questa definizione,
che affianchiamo a quella di forza posizionale. Con tale nome si designa una forza che
p
prende valori nel solo spazio delle configurazioni del sistema, e cioè Fi : R3n −→ R3 per
ogni punto di coordinate OPi .
• Un esempio di forza posizionale: la forza elastica esplicata tra due masse vincolate
ad una molla (oppure l’interazione gravitazionale o elettromagnetica tra due corpi
dotati di massa o di carica): i cosiddetti campi newtoniani, un esempio dei quali è
F (OP1 , OP2 ) = F (P1 P2 ) = γ
m1 m2
|P1 P2 |2
e P1 P2
(γ è una costante sperimentalmente determinata, M1 , m2 sono le masse –o cariche–
p
dei corpi in gioco e |v| = v · v la usuale norma euclidea reale).
• Un esempio di forza non posizionale: la forza viscosa, che un fluido (come l’aria o
l’acqua) esplica su di una massa immersa in esso. Tale forza è infatti proporzionale
alla velocità del punto materiale.
Il caso in cui su di una particella agisca una forza posizionale merita di essere isolato dagli altri: supponiamo (per fissare le idee) che n = 1 e sulla unica particella del
sistema agisca una forza posizionale. Allora alla funzione F : R3 −→ R3 che manda
OP = (x 1 , x 2 , x 3 ) in F (OP) si può associare una forma differenziale d L : R3 −→ (R3 )∗ ,
cioè ad ogni punto OP è possibile associare una forma lineare che agisce così:
X
d L(OP).v =
Fα (OP)vα
Si possono notare da subito varie analogie, che però per ora lasciamo all’intuizione personale. Sottolineiamo solo che la nozione di invarianza di una forza nel cambio di
sistema di riferimento passa attraverso la nozione di invarianza dell’integrale della sua
forma lavoro (tale è il nome di d L(#)) che è indipendente da riparametrizzazioni.
VINCOLI E’ necessario, alfine di sviluppare appieno la teoria, che le funzioni forze
siano dei dati del sistema. Per ogni coppia di particelle in un sistema libero è possibile
impostare (almeno in teoria) un sistema di equazioni che tiene conto di ogni mutua
interazione e risolverlo: la prima famiglia di forze di cui vogliamo una espressione è
quella delle forze vincolari, vale a dire delle forze esplicate da un vincolo posto al moto
del sistema. Spieghiamoci meglio: nei casi in cui lo spazio delle configurazioni di un dato
3
FISMAT 2008/2009
sistema sia un sottoinsieme proprio di R3n diremo che i punti del sistema sono vincolati
a muoversi solo in una determinata regione S dello spazio. Questa idea, che sembra
nascere per semplificare l’impostazione delle suddette equazioni risolutive, è in realtà
spesso una complicazione: nulla assicura infatti che la struttura di S sia lineare, o anche
solo sufficientemente liscia per lasciarsi descrivere comodamente da equazioni semplici.
Dobbiamo anzitutto riuscire a descrivere geometricamente il vincolo S: vorremmo
utilizzare variabili libere, che non costringano sempre a specificare la natura di S ma
contengano “in sè stesse” l’informazione che il moto dei punti avviene solo in una determinata regione dello spazio. Tali coordinate, dette lagrangiane, emergono naturalmente
se si pensa al vincolo come luogo degli zeri di una funzione f : R3n −→ Rk che manda
OP = (OP1 , . . . , OPn ) in ( f1 (OP), . . . , f k (OP)): si presentano da subito vari problemi di
natura organizzativa, che però possono essere risolti ipotizzando un sufficiente grado
di liscezza (nei casi pratici si ha sempre a che fare con funzioni C ∞ , quando non reali
analitiche) e invocando di conseguenza il teorema della funzione implicita nel suo caso
generale.
Supponiamo dunque f almeno C 1 , che esista OP∗ tale che f (OP∗ ) = 0, e che
rk d f (OP∗ ) = k (il massimo). Allora la mappa lineare d f (OP∗ ) ha un minore non nullo di rango k, e invocando il succitato teorema è possibile esplicitare k variabili come
funzioni delle restanti n − k.
In altre (forse più comprensibili) parole, sia N = 3n − k. Nelle ipotesi di prima
Ý
esistono un aperto U ⊆ RN e una funzione O
P : U −→ R3n , che manda q = (q1 , . . . , qN )
Ý
in O
P(q) tali che
Ý
1. f (O
P(q)) ≡ 0 per ogni q ∈ U
Ý stabilisce un omeomorfismo con la sua immagine OP(U)
Ý
2. OP
(cioè tale insieme è
3n
aperto nella topologia indotta su S da quella di R ).
Poniamo l’accento su un fatto importante ma poco visibile: tale descrizione è di natura
squisitamente locale.
Un esempio potrebbe essere la parametrizzazione
della sfera in R3 (cioè la determinazione dello spazio
delle configurazioni di un unico punto vincolato a
muoversi su di una superficie sferica). Fissato r > 0 si
ha allora che S = f ← (0) ove f : R3 −→ R, f (x, y, z) =
x 2 + y 2 + z 2 − r 2 . Scegliamo il punto OP ∗ = N =
(0, 0, r): visibilmente f (OP ∗ ) = 0, e altrettanto visibilmente rk d f (N ) = rk ( 0 0 2r ) = 1. Esiste allora un aperto
Ý
Ý
U in R2 tale che (q1 , q2 ) 7→ O
P(q1 , q2 ) e f ◦O
P = 0 in ogni
punto di U. Osserviamo da subito una differenza con la
formulazione “classica” del teorema del Dini: in quest’ultima versione infatti la funzione esplicitanda vivrebbe in
R. Così è, dato che z(x, y) è una funzione scalare. Ma quel che interessa a noi èp
parametrizzare
Ý
vettorialmente la superficie S, di modo che O P(q) = (x(q), y(q), z(q)) = (q1 , q2 , r 2 − q12 − q22 ).
Al lettore più preparato non saranno sfuggite altre osservazioni:
4
FISMAT 2008/2009
• Il procedimento seguito è esattamente quello che permette la parametrizzazione, in forma
cartesiana, di una varietà differenziale data come luogo degli zeri di una sommersione:
la funzione trovata è quella che parametrizza tutti i punti dell’emisfero Nord di S, e un
possibile atlante è costituito dalla parametrizzazione trovata e da quella che parametrizza
i punti dell’emisfero australe (più una parametrizzazione, locale o globale, dell’Equatore).
Ý sulle prime
• La parametrizzazione trovata è espressa in forma di Monge (l’azione di OP(·)
due variabili è cioè l’identità), e prende il nome di immersione vincolare.
• La nozione di compatibilità tra carte rende possibile la “sovrapposizione” di parametrizzazioni diverse (ricordiamo che due carte (U, φU ), (V, φV ) si dicono C k –differenzialmente
compatibili se la mappa φV φU−1 : φU (U ∩ V ) −→ φV (U ∩ V ) è un C k –diffeomorfismo).
• La parametrizzazione trovata è comprensibilmente tutt’altro che unica (e anzi esistono
atlanti per S2 strettamente più piccoli di quello trovato): un altro esempio potrebbe essere quello che parametrizza tale varietà mediante le coordinate sferiche, di modo che S2
privata del meridiano di Greenwich è diffeomorfa all’aperto ]0, 2π[×] − π, π[.
Abbandoniamo questa disquisizione prettamente geometrica per particolarizzare il
lavoro fatto al caso fisico: vogliamo esprimere analiticamente i vincoli alla dinamica
di un corpo. Supponiamo per esempio di avere dei punti materiali che viaggiano su
un vincolo liscio (cioè privo di attrito): tale liscezza si traduce nell’azione delle sole
forze che hanno componente nulla nel piano affine tangente alla varietà S nel punto
di coordinate OPi . Le suddette forze appartengono insomma all’ortogonale dello spazio
tangente al vincolo: la costruzione di TOP∗ S è classica, costruiamo l’insieme dei vettori
tangenti a tutte le curve differenziabili il cui sostegno è Γ ⊂ S. Si ha allora
Ý
f (O
P(λ(t))) ≡ 0 ⇐⇒ d f (OP∗ )
e allora
Ý
dO
P(0)
dλ
≡0
(1)
TOP S = ker d f (OP∗ ) .
∗
Volendo una descrizione alternativa, che usi l’immersione vincolare (e dunque “traduca” le coordinate dall’aperto di riferimento della parametrizzazione alla varietà in esame), possiamo procedere
Ý
a rovescio. Siano U, O
P(·): U −→ RN l’aperto e
la funzione esplicitante. Prendiamo curve arbitrarie
Ý
definite in U e ivi almeno C 1 , tali che O
P(γ(0)) =
∗
OP . Allora detto I j il dominio della curva γ j pasÝ
sante per q∗ , si ha O
P(γ j (t)) ∈ S per ogni t ∈ I j ∩ U.
Derivando, per la regola della catena, si avrà poi
Ý
dO
P(γ(t)) ′
Ý
Ý ∗ ).γ′ (0)
(0) = d OP(q
= d OP(γ(0))·γ
dγ
t=0
(2)
5
FISMAT 2008/2009
Ý
essendo ora d O
P(q∗ ) suriettiva, al variare di γ′ (0) essa copre l’intero codominio, e allora
TOP∗ S = im d OÝP(q∗) .
(
OP ∈ S
.
In sostanza l’atto di moto (OP, v) si dirà compatibile col vincolo S se
v ∈ TOP S
I vettori Φ appartenenti alla classe delle reazioni vincolari compatibili ΥOP,v,t mantengono allora il punto sul vincolo: abbiamo appena configurato la struttura di tutti i moti
dinamicamente possibili per la configurazione data. Esse hanno infatti tutte la forma
mi
d 2 OPi (t)
d2 t
= Fi OP(t),
dOP(t)
dt
,t
+ φi (t)
∀ i = 1, . . . , n
ove Φ(t) = (φ1 (t), . . . φn (t)) ∈ Υ.
OSSERVAZIONE. Le incognite di questa equazione sono sia le funzioni t 7→ OP j (t) che i
vincoli φ j (t): per tale ragione questa non è una equazione differenziale risolvibile con
metodi usuali.
L’ultima osservazione porge l’occasione di introdurre quello che è l’argomento cardine di tutta la Fisica Matematica (e in generale delle Scienze Applicate), e cioè lo studio ragionato delle equazioni differenziali. Senza dover entrare nel merito (sarà compito
di un corso di Analisi) possiamo enucleare il problema in riuscire a determinare quali
funzioni abbiano delle date relazioni non banali con le proprie derivate k-esime.
Il caso generale (ma si badi, in assenza di vincoli, cioè Φ = (0, . . . , 0)) che da subito
andremo ad affrontare sarà quello in cui ż(t) = Z(z(t), t), ove Z : Rm × R −→ Rm e
la cui soluzione è una funzione t 7→ z(t). Il problema è veramente analogo a quello
che si presenta a noi, dato che possiamo ricondurci ad esso ponendo OPi′ (t) = vi (t) e
vi′ (t) = m1 Fi (OP(t), v(t), t) per ogni i = 1, . . . , n. Abbiamo allora ridotto una ED del
i
secondo ordine in R3n ad un sistema del primo ordine in dimensione doppia. Studiamo
allora l’oggetto
Z : R6n × R −→ R6n
(z, t) = OP
, t 7→ Z(z, t)
v
Segue un problema legato alle condizioni iniziali, e vale il teorema di Cauchy
1 (Cauchy). Sia Z : Rm+1 −→ Rm , lipschitziana in Rm uniformemente lipschitziana2
in [a, b] ⊆ R. Dati t 0 ∈ [a, b] e la condizione iniziale z(t 0 ) = z0 esiste unica la soluzione
al sistema
(
ż = Z(z, t)
(PC)
z(t 0 ) = z0
TEOREMA
2
6
Ciò equivale a chiedere che Z(z1 , t) − Z(z2 , t) ≤ Λ z1 − z2 indipendentemente da t.
FISMAT 2008/2009
Dimostrazione. Omessa. Si basa, come molti risultati di questo tipo, su un argomento di
punto fisso.
OSSERVAZIONE. Questo teorema è una traccia (storica, scientifica, filosofica) del deter-
minismo classico laplaciano e positivista: assegnate posizioni e velocità iniziali al sistema, l’evoluzione temporale di ognuno degli n punti nello spazio delle fasi è univocamente determinata.
Sistemi Autonomi Supponiamo ora che la funzione Z(·) sia indipendente dal tempo:
allora Z : Rm −→ Rm , l’equazione differenziale viene detta autonoma e Z viene chiamato
campo vettoriale3 . Siamo chiamati a risolvere ż(t) = Z(z(t)) con la condizione z(t 0 ) = z0 .
La nostra ricerca si volge a trovare delle curve i cui vettori del campo siano i vettori
derivati, deve cioè valere
γ′ (t) = Z(z(t)) = ż(t) per ogni γ(·): I −→ Rm
Una prima domanda è: esistono soluzioni costanti al problema? Ebbene, ciò accade solo
se il punto z0 è uno zero del campo vettoriale Z(·). In tal caso il punto z0 è detto equilibrio
del sistema.
Il problema meccanico si riduce allora a trovare per quali coppie configurazione/velocità
il sistema è in equilibrio (cinematico e) dinamico, cioè a trovare gli zeri di una equazione
algebrica:
(
v0i ≡ 0
∀i = 1, . . . , n
Fi (OP0 , 0) = 0
Il problema giace oltre qualunque pretesa di trovare un metodo generale: così come
esistono serie e integrali il cui valore preciso di convergenza non è calcolabile, esistono
ED per cui, addirittura, è impossibile scrivere una soluzione a meno di quadratura (cioè
a meno del calcolo di un integrale).
Una nota terminologica: la traiettoria di un equilibrio è detta quiete (con un ovvio
richiamo fisico!), e anzi in generale un certo atto di moto (OP, v) ∈ R6n è un equilibrio
se la quiete è una traiettoria dinamicamente ammissibile per quel sistema (e questa
definizione ha il merito di descrivere anche il caso di presenza di vincolo):
(OP, v) è un equilibrio se esiste Φ(t) ∈ ΥOP,v,t tale che 0 = F(OP, 0, t) + Φ(t)
PROPOSIZIONE 1. Se ż(t) = Z(z(t)), z(t 0 ) = z0 è un sistema autonomo allora il suo insieme
delle soluzioni è invariante per traslazione4 .
Dimostrazione. Siano φ(·) una soluzione del PC, e sia τc l’operatore di traslazione tale
che τc z(t) = z(t − c). Allora posto z(t − c) = z̃(t), si ha˙˜z(t) = ż(t − c) = Z(z(t − c)) =
Z(z̃(t)), e allora anche z̃(·) è soluzione al PC.
3
La “vera” definizione di campo vettoriale sarebbe quella di una applicazione Z : A(Rm ) −→ A(Rm ) ×
R che manda P nella coppia (P, v)
4
In altre parole l’insieme ς delle soluzioni del PC è invariante sotto l’azione del gruppo Tras(R).
m
7
FISMAT 2008/2009
OSSERVAZIONE. Tale risultato smette di valere, se il campo non è autonomo. Il van-
taggio principale offerto da questo risultato è la possibilità di ricondurre la condizione
iniziale z(t 0 ) = z0 a quella z(0) = z0′ , e dunque spesso nel seguito ometteremo questa
informazione sulla condizione iniziale.
1 (Integrale Primo). Una funzione E : Rm −→ R si dice integrale primo della
ED autonoma ż(t) = Z(z(t)) se, per ogni soluzione z̄(·) della suddetta, si ha che t 7→
E(z̄(t)) è una funzione costante per ogni t nel dominio di z̄.
DEFINIZIONE
OSSERVAZIONE. La costante k = E(z(t)) è indipendente dal particolare t 0 ∈ Dom z, ma
può a priori dipendere dalla particolare soluzione z̄(·) considerata.
2. Sia Z(#): Rm −→ Rm un campo vettoriale localmente lipschitziano. Allora il campo scalare E(#): Rm −→ R è un integrale primo del PC ż(t) = Z(z(t))
se, e solo se, per ogni y ∈ Dom Z , si ha Z( y) ∈ ker d E( y) (cioè alternativamente
d E( y) ∈ ⟨Z( y)⟩⊥ ).
PROPOSIZIONE
Dimostrazione. Supponiamo che d E(·).Z(·) ≡ 0 per ogni y ∈ Dom Z. Allora se φ è
soluzione al PC, per la regola della catena si ha
d(E(φ(t)) = d E(φ(t)).φ ′ (t) = d E(φ(t)).Z(t) ≡ 0
e ciò implica che E(φ(t)) sia identicamente costante (almeno) in un aperto contenuto
in Dom Z.
Viceversa, se E(#) è un integrale primo per il PC, e se φ è una soluzione al suddetto,
derivando la composizione E ◦ φ = k si ha la tesi.
Ora, qual è l’utilità di questo oggetto?
Come è possibile determinarlo? La risposta
alla seconda domanda è, purtroppo, un deciso “in nessun modo generale”. Per quanto
riguarda però la prima, possiamo notare che
la conoscenza di un integrale primo E(·) per
il campo Z(·) permette di abbassare la dimensionalità del problema. Consideriamo infatti
il solito PC e il luogo degli z ∈ Rm tali che
E(z) = E(z(t 0 )) = E(z0 ): tale luogo
Σ := {z ∈ Rm | E(z) − E(z0 ) = 0
ha struttura di varietà (m − 1)-dimensionale,
e se supponiamo che t 7→ z(t) sia una curva
passante per z0 troviamo che E(z(t)) = k =
E(z(t 0 )) = E(z0 ), e allora z(t) ⊂ Σ. Il vantaggio è chiaro: alla ricerca di soluzioni,
invece dell’intero spazio Rm si può studiare il più ristretto sottoinsieme Σ (si vincola la
8
FISMAT 2008/2009
soluzione ad abitare la sola zona E ← (E(z))). Disponendo di più di un integrale primo
(diciamo ri r ≤ m−1 funzioni scalari E1 , . . . , Er ) si riesce allora a rendere
più forte questo
Tr
vincolo, imponendo a tutte le soluzioni di vivere nell’intersezione j=1 E ←
(E(z)).
j
Note di Meccanica dei Sistemi Rigidi
Ma si può ascendere in virtù di una forza che è
discendente.
Giovanni Lindo Ferretti (CCCP)
Il nostro spazio di lavoro sarà E3 (R) dotato delle tre operazioni
• Prodotto Scalare (canonico): la forma bilineare non P
degenere, definitaPpositiva, che ha
n
n
matrice identica nella base E = {e1 , . . . , en }: v · w = i, j=1 vi δi j w j = i=1 v1 w i dotato
delle usuali proprietà (simmetria, linearità, positività. . . )
e v w 1 1 1
2 =
• Prodotto Vettoriale: la forma bilineare alternante definita come v × w = ee2 uv2 w
3 3 w3
v w −v w
1 2
2 1
v3 w1 −v1 w3
dotato delle proprietà usuali (ne ricordiamo alcune):
v1 w2 −v2 w1
– Il prodotto misto definito da mix(u, v, w) = u · (v × w) è invariante sotto l’azione dei
3–cicli (perchè?);
– Per il doppio prodotto vettore u × (v × w) vale l’identità
u × (v × w) = (u · w)v − (v · w)w
• Prodotto tensore: dati due vettori v, w ∈ Rn il prodotto tensore tra i due è definito come
la matrice n× n che agisce come (v ⊗ w)u = (w ·u)v: questo si può vedere anche lavorando
in coordinate, se si nota che, per come è definito, la matrice del prodotto tensore v ⊗ w è
v1 w1 ... v1 wn
v 1
.. . . ..
.
( w1 ... wn ) =
(v ⊗ w)i j = vi w j
. .
.
vn
vn w1 ... vn w n
Consideriamo ora due terne (nel seguito, indicheremo così dei riferimenti ortonormali in E3 (R)):
una di loro, (O, e∗i ), sarà detta base fissa, mentre l’altra (O, ei ) sarà detta base mobile. Per indagare
le relazioni tra i due, introduciamo la matrice dei prodotti scalari traPle due basi: R = (ri j =
(e∗i · e j ). Ricordando che per basi ortonormali vale la relazione v · w = (e j · v)(e j · w) possiamo
mostrare che la matrice R è ortogonale:
RR t =
3
X
k=1
=
3
X
k=1
R ik R tk j =
3
X
k=1
R ik R jk =
3
X
(e∗i · ek )(e∗j · ek ) =
k=1
3
X
(ek · e∗i )(ek · e∗j ) = e∗i · e∗j = δi j
k=1
allora R ∈ O3 (R) e det2 R = 1 (le trasformazioni incorporate sono allora tutte le isometrie, dirette e inverse: al riguardo c’è da spendere una parola. La Meccanica Classica è invariante per
9
FISMAT 2008/2009
isometrie inverse (cioè le leggi fisiche sono invarianti sotto riflessioni), ma così non è per tutta la
Fisica: un primo esempio si incontrerà in Elettromagnetismo, studiando le proprietà del campo
magnetico. Tale campo vettoriale, che ha la proprietà di cambiare verso se riflesso, è dotato di
una chiralità). La matrice R costituisce allora il cambio di base tra le due terne: in notazione
coordinate–free si ha cioè u∗ = Ru ⇐⇒ u = R t u∗ per ogni u ∈ R3 .
2 (Vettore Solidale). Diremo un vettore u solidale ad una data terna se le sue coordinate in quella terna non sono funzione del tempo.
DEFINIZIONE
Vogliamo trovare l’espressione di u̇(t): si ha derivando rispetto al tempo l’espressione u∗ =
Ru, che u̇∗ = Ṙu, e dunque, derivando specularmente anche u = R t u∗ si ha u̇ = R t u̇∗ = R t Ṙu.
La derivazione di un vettore nel dato riferimento è allora identica all’azione di una certa trasformazione lineare. Quali caratteristiche possiede tale trasformazione? Ci serve una lunga digressione. Cominciamo con una descrizione dell’insieme degli operatori antisimmetrici di E3 (R).
TEOREMA
2 (Rappresentazione degli operatori antisimmetrici di E3 (R)). L’insieme
Skew3 (R) := {(ai j ) ∈ M3 (R) | ai j + a ji = 0}
è un sottospazio vettoriale di M3 (R) di dimensione 3. Inoltre si ha (non canonicamente) Skew3 (R) ≃
R3 .
Dimostrazione. La verifica che Skew3 è un sottospazio è facile. Per la dimensione, Skew3 è una
sottovarietà lineare, è descritto dalle 6 equazioni {ai j + a ji = 0}i, j=1,...,3 . Allora la sua dimensione
è dim Skew3 (R) = dim M3 (R) − 6 = 9 −6 = 3. Infine,
un isomorfismo (fissata una base, che per
a
0 a b
noi sarà sempre quella canonica) è τ: −a 0 c 7→ b (infatti τ è visibilmente suriettiva, e
per ragioni di dimensione si conclude).
c
−b −c 0
3. Sia ω ∈ E3 8R) fissato. L’applicazione Lω : E3 (R) −→ E3 (R) che manda u in ω×u
è lineare e antisimmetrica.
PROPOSIZIONE
Dimostrazione. La linearità di Lω discende da quella del prodotto vettore. Per provare che essa
è antisimmetrica (proprietà che, comunque, discende anch’essa dal prodotto vettore), si può far
così: L i j = e j Lei = e j (ω×ei ) = e1 (e j ×ω) (permutando i vettori) = −ei (ω×e j ) = −ei Le j = −L ji .
Svolgendo il prodotto si trova che
0 −ω3 ω2
L = ω3 0 −ω1
−ω2 ω1
0
Resta solo da provare che
4. Sia R(t) una matrice tale che R(t) ∈ SO3 (R) per ogni t ∈ R. Allora la matrice
A(t) := R (t)Ṙ(t) è antisimmetrica.
PROPOSIZIONE
t
Dimostrazione. Facile, derivando R t R = I con la regola di Leibniz.
La conclusione cui volevamo giungere può essere così sintetizzata: esiste un unico vettore
ω ∈ E3 (R) tale che Au = ω × u (per ogni u ∈ E3 (R)).
Se pensiamo di derivare rispetto al tempo dei particolari vettori solidali, quelli della base
mobile, scopriamo quelle che sono dette formule di Poisson.
10
FISMAT 2008/2009
3 (Poisson). Siano E , E ∗ due terne (una fissa e una mobile). Rispetto alla terna fissa, i
vettori della mobile risentono di una “velocità angolare”
TEOREMA
ω=
3
1X
2
i=1
ei × ėi
Dimostrazione. E’ un conto, basta scrivere e1 × ėi = ei × (ω × ei ) e sviluppare di conseguenza il
doppio prodotto vettore.
P3
Generalizziamo: dato un vettore qualunque u = i=1 ui ei la sua velocità nella base mobile è
!
3
3
3
3
X
X
X
X
u̇(t) =
u̇i (t)ei (t) +
u1 (t)ėi (t) = u̇(t) +
ω × ei (t) = u̇(t) + ω × u(t)
ui
i=1
i=1
i=1
i=1
Abbiamo trovato una espressione per la velocità (nella base mobile) di un vettore rispetto alla
base fissa. Applichiamo questa conoscenza a
Rotazioni piane Sono le trasformazioni per cui e3∗ ≡ e3 (e allora il moto avviene nel piano
⟨e1 , e2 ⟩ ed è una rotazione). La matrice di tale rotazione è univocamente determinata da
cos θ − sin θ 0 R(θ ) = sin θ cos θ 0
0
E’ allora facile calcolare Ṙ(θ ) = θ̇
− sin θ − cos θ 0
cos θ − sin θ 0
0
0
0
0
1
t
0 −θ̇ 0
θ̇ 0 0
0 0 0
. L’applicazione
e R (θ )Ṙ(θ ) =
0
lineare A agisce dunque su u come ω × u, dove ω = 0 (si vede facendo il conto). Osserviamo
θ̇
che ω è un vettore che ha (unica) componente parallela ad e3 ≡ e3∗ : il campo dei vettori velocità
è piano, e i vettori vP sono
• In modulo uguali per P, Q se OP = OQ;
• In direzione ortogonali alla congiungente OP (di modo che {ω, OP, v} sia una terna equiorientata);
• In verso dettato dal senso di rotazione (cioè dal segno di θ̇ e dal prodotto vettore).
Tutto quanto detto sfocia in una formula fondamentale che caratterizza i moti rigidi:
DEFINIZIONE 3 (Moto Rigido). Il moto di un corpo S si dice rigido se dati comunque P, Q ∈ S , è
costante (nel tempo) la quantità |OP − OQ|. In altre parole, definiamo moti rigidi delle rigidità
non inverse (traslazioni, rotazioni, ecc. . . ).
Osserviamo che ogni sistema S in moto rigido ammette una terna ortonormale solidale:
affinchè la definizione abbia senso infatti, S deve essere fatto almeno da due punti P, Q. Il
vettore PQ normalizzato fa da primo versore, un qualunque vettore normale u a lui fa da secondo
versore, e il prodotto vettore OP × u = v fa da terzo asse.
˙ otteniamo
Fatto chiave: per ogni P, Q ∈ S si ha OP + PQ = OQ e se cerchiamo la velocità PQ
vq − vP =
11
d
t
˙ =
(OQ − OP) = PQ
d
dt
PQ = ω × PQ
FISMAT 2008/2009
Quest’ultima formula si scrive solitamente
vQ = vP + ω × PQ
(⋆)
detta formula fondamentale dei moti rigidi.
Atti di Moto Dato un moto e un istante di tempo, consideriamo il campo vettoriale che associa
al punto OP la coppia (OP, vP ): tale campo è detto atto di moto del sistema. Diamo alcune
definizioni:
• L’atto di moto si dice rigido se vale la formula vQ = vP + ω × PQ per ogni coppia di punti
P, Q.
• L’atto di moto si dice traslatorio se per ogni coppia P, Q vale vP = vQ .
• L’atto di moto si dice rotatorio se esiste un punto Q tale che vQ = 0 all’istante di tempo
dato.
• L’atto di moto si dice piano se il campo vettoriale delle velocità è piano (cioè esiste un
piano π ∈ E3 tale che vP ∈ π per ogni punto P).
• L’atto di moto si dice elicoidale se esiste una retta r tale che vP k r per ogni punto P ∈ r:
l’atto di moto elicoidale si scompone in sostanza in una rotazione piana e una traslazione
lungo l’asse di rotazione.
TEOREMA 4 (Dell’asse Centrale). Ogni moto rigido è elicoidale (cioè ogni campo vettoriale che
verifica (⋆) ammette un asse centrale.
Dimostrazione. Se vale vP = vQ + ω × PQ possiamo proiettare tutto su ω: si ha vP · ω = vQ · ω
(perchè ω · (ω × PQ) = 0: ciò ci dice anche che ogni punto ha ugual componente parallela a ω).
vp ·ω
Sia allora τ vP := ω·ω ω: ogni velocità si scompone allora in vP = τ vP + vP⊥ . Ma allora
vP = τ vP + vP⊥ = τ vQ + vQ⊥ + ω × PQ
vP⊥ = vQ⊥ + ω × PQ
Se esiste Q tale che vQ⊥ = 0, allora vP⊥ = ω × PQ (cioè il moto di P rispetto a Q è solo rotatorio) e
in particolare vP = 0 per ogni P sulla retta per Q parallela a ω (fare il conto per capire perchè).
Per tali punti vP = τ vP , e alloa i punti di questa retta sono soggetti a sola traslazione: l’atto di
moto, composizione dei due, è elicoidale). Cerchiamo allora (fissato O) un punto Q tale che
vQ⊥ = vO⊥ + ω × OQ = 0, cioè vO = OQ × ω. Abbiamo già risolto questo problema: esiste uno e un
solo vettore OQ tale che questa relazione sia vera, e tale vettore è
OQ =
la retta Q + ⟨ω⟩ è allora quella cercata.
12
ω × vO⊥
ω·ω
FISMAT 2008/2009
e2∗
e2
x
b
z
x
e1
P
e1∗
b
vP
y
y
e3∗ ≡ e3
v ·ω
P
OSSERVAZIONE. Applicando questo risultato a un moto rigido piano, si trova che τ vP = ω·ω
ω=0
per ogni P: ciò è logico, a posteriori, dato che il moto deve restare piano. La componente di
traslazione lungo l’asse e3 di rotazione è allora nulla: moti rotatori sono moti elicoidali degeneri.
Osservazione meno banale è che ad ogni istante esiste un punto Q che non ruota (per
definizione di moto rotatorio). Tale punto è quello che si dice centro istantaneo di rotazione
del moto, e può essere trovato con semplici considerazioni geometriche.
Moto di puro rotolamento La situazione
fisica è quella di un disco di raggio R che si
muova lungo una direzione orizzontale, rotolando senza strisciare. Questa condizione si
traduce nel “vincolo sulle velocità” vC ≡ 0, se
θ
C è il punto di contatto tra il disco e l’asse delle
x di un opportuno riferimento.
A descrivere il moto basta una sola coorP′
P
dinata, al contrario del caso generale in cui
sarebbero necessarie sia x C (ascissa del punto di contatto) che φ (angolo pazzato dal disco): questo perchè le due grandezze, nel caso di
puro rotolamento (che può essere visto come la situazione “speculare” all’assenza di attrito, dato
che presuppone una reazione vincolare tangente infinita), sono legate dalla relazione x G = Rφ.
Sia G il centro del disco, e proviamo a scrivere la formula fondamentale dei moti rigidi:
b
b
b
b
b
vG = vC + ω × C G = ω × C G ⇒ ẋ G e1∗ = θ̇ R(e3∗ × e2∗ ) = −θ̇ Re1∗
Allora ẋ G = Rθ̇ ⇒ x G (t) = Rθ (t) + k, come ci aspettavamo.
OSSERVAZIONE. Fissato un punto sul bordo di D, la traiettoria che esso segue è un arco di
cicloide. Esiste un modo di ricavare questo fatto dalla equazione del moto?
Dinamica Relativa Vorremmo ora cercare una formula generale per le velcoità relative: quella che possediamo si riferisce solo a riferimenti solidali che condividono l’origine con il riferimento fisso. In tale trattazione sia le coordinate dei vettori generici sia i versori di base sono funzioni
del tempo (ometteremo dunque per alleggerire la notazione questo particolare). Se le origini
13
FISMAT 2008/2009
non coincidono, per un generico vettore OP varrà la semplice relazione O ∗ P = O ∗ O + OP. Se
consideriamo la derivata rispetto al tempo di OP dobbiamo allora svolgere
dO ∗ P
dt
=
dO ∗ O
dt
+
dOP
dt
3
X
(a)
= vO +
ẋ i ei +
i=1
(a)
= vO +
3
X
!
x i ėi
3
X
ẋ i ei +
3
X
i=1
(τ)
=
i=1
i=1
!
x i (ω × ei )
(a)
(r)
= vO + vP + ω × OP
(3)
(a)
e se definiamo vP := vO +ω×OP (velocità di trascinamento del sistema), abbiamo compendiato
la relazione tra i moti in
(a)
(r)
(τ)
vP = vP + vP
(VR)
(formula fondamentale della dinamica relativa, o formula fondamentale dell’invarianza galileiana).
(r)
OSSERVAZIONE. Se Pè fermo rispetto alla terna mobile, vP = 0, e si riscopre la formula dei moti
(a)
(a)
rigidi vP = vO + ω × OP (che è com’è ovvio un caso particolare di moto relativo).
Vorremmo ora scrivere analoghe relazioni per le accelerazione relative. Strada ovvia è
derivare l’equazione precedente:
(a)
(a)
d vP
dt
=
d vO
dt
(r)
+
d vP
dt
+
dω × OP
dt
(a)
il membro di sinistra è semplicemente a P . Per quanto riguarda gli altri, per evitare confusione,
isoliamo ogni termine.
(r )
•
•
d vP
dt
dω×OP
dt
(a)
•
d vO
dt
(r)
=
=
(r)
a P + ω × vP
=
dω
dt
× OP + ω ×
dOP
dt
=
(r)
ω̇ × OP + ω × (vP + ω × OP)
(a)
aO Riordinando i vari termini si ha
(a)
(r)
(a)
(r)
a P = a P + aO + ω̇ × OP + ω × (ω × OP) + 2ω × vP
(a)
(r)
a P = a P + a PC e + a PC o
(AR)
(a)
In tal modo (AR) si è compendiata nell’ultima relazione. Il termine a PC e = aO + ω̇ × OP + ω ×
(τ)
(ω × OP) è detto accelerazione di trascinamento (per ovvia derivazione dalla velocità vP ), o
(r)
accelerazione complementare centripeta, mentre il termine a PC o = 2ω × vP è detto accelerazione
di Coriolis.
OSSERVAZIONE. La dinamica galieiana classica si fonda sul postulato (che importiamo come
tale da un corso di Elementi di Fisica) secondo il quale le forze osservate sono indipendenti dal
riferimento, e vale il principio d’inerzia assieme alla legge cardinale della dinamica, ma P = FP
14
FISMAT 2008/2009
(ove FP indica le forze agenti su P –solo quelle vere–). Allora, se supponiamo di avere il sistema
fisso E ∗ e il sistema mobile E , grazie alle relazioni appena trovate, abbiamo
(a)
(r)
ma P = ma P + mA(i) = F
Ques’ultima relazione in particolare porge il modo di correggere l’equazione cardinale riferendola a sistemi non inerziali: il termine mA(i) è detto termine d’inerzia, e rappresenta il termine
“correttivo” da aggiungere considerando sistemi che non rispondono al primo principio della
Dinamica5 . Allora
ma P = F − mA(i) = F + F (i)
Benchè termini di forza apparente possano comparire anche in moti rettilinei (è sufficiente
che non siano uniformi), i riferimenti non inerziali per eccellenza sono quelli rotanti. Il sistema
rotante per eccellenza è ovviamente il nostro pianeta: non mancano esempi di come termini
inerziali (ancorchè piccoli, osservabili senza nessuna particolare strumentazione) appaiano in
moti che osserviamo quotidianamente. Vediamo due esempi
Accelerazione centripeta, deviazione dalla verticale Se particolarizziamo le equazioni
precedenti al caso terrestre, l’accelerazione centripeta (o meglio, l’apparente termine centrifugo) agisce su quella di gravità deviandone la direzione: nella relazione g′ − g = ω × (ω × OP),
il termine OP è il raggio del parallelo di latitudine λ: per un osservatore fisso (esterno al sistema rotante Terra) il punto P descrive un moto circolare attorno a tale parallelo: r = R cos λ.
Svolgiamo esplicitamente il prodotto vettore, ricordando che ω × OP = −(θ̇ R cos λ)e3 :
−ω × (ω × OP) = det
e1
e2
e3
θ̇ sin λ θ̇ cos λ
0
0
0
−θ̇ R cos λ
=
θ̇ 2 R cos2 λ
−θ̇ 2 R cos λ sin λ
0
p
la norma di tale vettore è ω4 R2 cos2 λ(cos2 λ + sin2 λ) = ω2 R cos λ; esso ha sempre due componenti, è diretto lungo il raggio del parallelo di latitudine λ, ha verso uscente e quindi è responsabile del termine apparente centrifugo. Si può vedere come il termine in modulo dipenda da
cos λ: L’effetto di distorsione dalla verticale è massimo all’equatore (λ = 0 o π) e nullo ai poli
(λ = π/2).
Coriolis, venti geostrofici e chiralità sanitaria Calcoliamo esplicitamente il termine −2ω×
(r)
vP : supponiamo anzitutto che la velocità del dato punto P abbia componente nulla in e1 (fisicamente, l’oggetto in moto non sale nè scende di quota). Con le solite regole sul prodotto vettore
si ha
(r)
−2ω × vP = det
e1
e2 e3
θ̇ sin λ θ̇ cos λ 0
0
v ′y
vz′
=
vz cos λ
−vz sin λ
v y sin λ
Questo vettore è sempre orientato verso destra nel nostro emisfero e verso sinistra in quello
australe. Se esaminiamo le due componenti che si trovano nel piano orizzontale, è chiaro che
il termine complementare devia la traiettoria verso destra: ciò è vero anche in generale, dato
5
Enunciato nelle parole di Newton: Corpvs omne perseverare in statv suo qviescendi vel movendi
vniformiter in directvm, nisi quatenvs a viribvs impressis cogitvr statvm illvm mvtare.
15
FISMAT 2008/2009
che in qualunque punto dell’emisfero Nord si assiste ad una deviazione.6 . Ciò è la causa di molti
fenomeni metereologici cui assistiamo comunemente:
• La caratteristica forma a spirale dei cicloni, causata dai venti che sono deviati dalla direzione radiale da una componente che ne “curva” il moto sempre nella stessa direzione.
• La circolazione delle correnti oceaniche (fenomeno osservato e sfruttato da Colombo nella
sua prima traversata atlantica) che girano sempre in un senso in un emisfero e sempre nel
senso opposto nell’altro emisfero.
• Il senso di rotazione (orario in un emisfero e antiorario nell’altro) degli scarichi dei lavandini.
• I venti geostrofici: in alta quota i venti viaggiano a velocità costante. Perchè ciò accada, la
forza della pressione deve essere bilanciata dalla forza di Coriolis. Se la pressione, come
è ovvio, è diretta verso il basso, e la forza di Coriolis spinge verso destra, la direzione del
vento non può che andare da Ovest a Est, facilitando certi viaggi
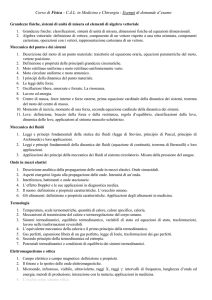
z intercontinentali.
z
ω
ω
b
b
P
b
y
x
x
y
Figura 1: Termini apparenti inerziali che compaiono in riferimenti rotanti. La prima figura mostra il
termine di “deviazione laterale” cui sono soggetti i gravi (in nero le velocità, entranti o uscenti, e in rosso
le forze apparenti). La seconda invece il termine apparente centrifugo.
Complemento – Angoli di Eulero e loro applicazioni in Meccanica E’ spesso utile
avere la possibilità di riferirsi ad una terna solidale secondo la quale i calcoli di equazioni del
moto o di coordinate si semplifichino. Diventa allora naturale, invece di utilizzare i coseni
direttori, scegliere di riferirsi agli angoli di Eulero. Siano date due terne di origine comune,
E = (O, x̂ i ), F = (O, ξ̂i ): è possibile mostrare che esiste una e una sola rigidità (per la precisione
composizione di tre rotazioni) che manda E in F :
6
All’Equatore tale effetto è nullo, ma basta spostarsi verso Sud in un qualsiasi punto dell’emisfero
(r)
australe per avere un termine (verificare questo, magari con un disegno) 2ω × vP che fa deviare verso
sinistra.
16
FISMAT 2008/2009
• Sia r la retta intersezione tra i piani ⟨x 1 , x 2 ⟩ e ⟨ξ1 , ξ2 ⟩ (se i due piani coincidono la terna
mobile ruota attorno all’asse verticale, e il moto si può facilmente descrivere in altro modo). Sia ψ(x 1, r) l’angolo (detto di precessione) tra l’asse x 1 ed r (che è detta linea nodale,
o retta dei nodi). La prima rotazione ha asse x 3 e angolo ψ;
• Sia poi θ l’angolo (detto di precessione) tra x 3 e ξ3 . La seconda rotazione ha asse r e
angolo θ ;
• Sia infine φ (detto di rotazione propria) l’angolo tra ξ1 e la linea nodale. L’ultima rotazione
sarà allora quella di asse ξ3 e angolo φ.
2
1
3
linea dei nodi
Figura 2: Angoli di Eulero: l’angolo in (1) è la rotazione propria, quello in (2) la nutazione, e quello in
(3) la precessione.
La trasformazione da eseguire per mandare E in F è allora (R(α) indica la matrice
di SO2 (R))
1
R(ψ)
SO3 (R) ∋ H = R(φ) 1
R(θ )
1
cos α − sin α
sin α cos α
Appare allora chiaro che la sua inversa (=trasposta) sarà quella che ci permette di “vedere” i
vettori ξ̂i come combinazione dei vettori della terna fissa. Si avrà dunque
cos φ cos ψ−cos θ sin φ sin ψ cos ψ sin φ+cos θ cos φ sin ψ sin θ sin ψ
t
E(ψ, θ , φ) = H = − cos θ cos ψ sin φ−cos φ sin ψ cos θ cos φ cos ψ−sin φ sin ψ cos ψ sin θ
sin θ sin φ
− cos φ sin θ
cos θ
risultano allora chiare le relazioni tra ξ̂i e x̂ j , relazioni che altrimenti sarebbero state molto più
difficili da decodificare (dovendosi basare su mere considerazioni trigonometriche). Il vantaggio
non è però solo questo: vogliamo esprimere le coordinate del vettore velocità angolare ω nel
riferimento mobile; ecco come fare. Scegliamo il riferimento (non ortonormale, ma la cosa si
17
FISMAT 2008/2009
rivelerà tra poco irrilevante) (O, n̂, x̂ 3 , ξ̂e ) (n̂ è il versore della retta dei nodi, preso positivo nel
senso tale che n̂ × x̂ 3 = ξ3 ). In tale riferimento il vettore ω ha coordinate
ω = ωn n̂ + ω x ξ̂e + ω x x̂ 3
Ricordando la definizione di velocità angolare θ̇ e il risultato per cui in una rotazione piana di
supporto π il vettore ω ha direzione parallela a π⊥ , otteniamo
ω = θ̇ n̂ + φ̇ ξ̂3 + ψ̇ x̂ 3
semplici considerazioni geometriche porgono poi n̂ = cos φ ξ̂1 − sin φ ξ̂2 . Allora nei due riferimenti il vettore ω ha coordinate
ωΞ =
θ̇ cos φ+ψ̇ sin φ sin θ
−θ̇ sin φ+ψ̇ cos φ sin θ
φ̇+ψ̇ cos θ
ωX =
θ̇ cos ψ+φ̇ sin ψ sin θ
θ̇ sin ψ−φ̇ cos φ sin θ
ψ̇+φ̇ cos θ
Equazioni Differenziali Faremo un uso costante, in tutta questa sezione, del teorema
di esistenza–unicità di Cauchy–Lipschitz, che assicura che a certe condizioni di regolarità
sul campo X (·) (i.e. l’uniforme lipschitzianità), l’equazione differenziale (ED) ż = Z(z)
con la condizione iniziale z(0) = z0 ammette unica soluzione t 7→ z(t). La trattazione
passa attraverso alcuni punti chiave:
• Mostrare che l’ipotesi di uniforme lipschitzianità locale è davvero necessaria;
• Studiare un primo esempio di sitema differenziale del primo ordine, non lineare,
e la sua tecnica risolutiva standard, la separazione delle variabili;
• Introdurre una tecnica per definire coordinate lagrangiane su di un vincolo olonomo
1–dimensionale;
• Studiare inc he modo questi strumenti risolvono il generico problema z̈ = Z(z),
con Z(·) campo regolare (almeno C 1). In particolare noteremo che la risolubilità
di tali sistemi dipende dalla possibilità di trovare un integrale primo per Z, E(z, ż);
• Evolvere quest’ultimo punto per capire come raffigurare le curve di livello di E
possa dare informazioni sulle soluzioni, sul loro comportamento al limite, ecc.;
• Studiare a fondo metodi risolutivi per le ED lineari del secondo ordine a coefficienti
costanti.
Campi vettoriali non lipschitziani Per il primo punto l’esempio è classico. Supponiamo di aver posto su di una guida rettilinea una massa m libera di muoversi senza attrito,
18
FISMAT 2008/2009
p
di avere il campo F : R3 −→ R3 , che manda OP in ( 3 x, 0, 0), e di voler cercare soluzioni
al PC
p
3
x(t)
mẍ(t)
=
x(0) = 0
ẋ(0) = 0
Osserviamo alcune cose: anzitutto x ∗ = 0 è una configurazione di equilibrio, e la
soluzione x(t) = x ∗ (quiete in x ∗ ) è una soluzione ammissibile. In secondo luogo, il
campo in esame non rispetta le ipotesi del teorema di Cauchy–Lipschitz, nemmeno riportato al primo ordine (in particolare non c’è lipschitzianità in nessun intorno di 0).
Mostriamo ora che il problema dato ammette in realtà infinite soluzioni: fissato τ > 0
costruiamo “a mano” la soluzione
0
se 0 ≤ t ≤ τ
x τ (t) =
3
a(t − τ) se
t≥τ
Verificare che x : τ(t) risolve il problema iniziale è semplice, una volta fissato in 6ma(t −
p
τ) = 3 a(t − τ), a = (6m)1 3/2 . Diamo una interpretazione fisica: il sistema è in quiete fino
ad un dato istante τ nel quale si “sveglia” e parte all’infinito con velocità quadratica. Per
campi non lipschitziani, il determinismo classico fugge anch’esso all’infinito.
ED Lineari del primo ordine
Supponiamo di voler studiare il Problema di Cauchy
(
ẋ = f (x)
x(0) = x 0
il campo f sia lipschitziano, e tale che f (x 0 ) 6= 0 (altrimenti esiste la soluzione costante
x(t) ≡ x 0 , che per CL è anche l’unica). Fatta questa assunzione sul segno, se x(t) è
soluzione al PC, esiste tutto un intorno destro di t = 0 tale che f (x(t)) > 0. Allora si ha
la possibilità di dividere:
Zτ
d x(t)
1
d x(t)/d t
= 1 =⇒
=τ
f (x(t))
d t f (x(t))
0
a questo punto, per ẋ(t) = f (x) > 0, t 7→ x(t) è un diffeomorfismo, e ammette per
inversa una certa x 7→ t(x). Risolvendo l’integrale con il cambio di variabile (integrando
da x 0 = a x) si ha
Z x
dξ
G(x) :=
=t
f (ξ)
x
0
(il metodo di sostituzione è abbastanza grafico e la notazione frazionaria aiuta a con1
6= 0) si trova
fondere!). In breve invertendo G (cio è possibile perchè G ′ (x) = f (x)
x(t) = G −1 (t) .
19
FISMAT 2008/2009
Parametrizzazione di Frènet Siamo ora interessati come da programma a trovare
il modo di introdurre opportune coordinate lagrangiane su di un vincolo olonomo 1–
dimensionale. Partiamo da un esempio meccanico: una massa m > 0 soggetta a una
forza posizionale (campo C 1), e al vincolo geometrico liscio parametrizzato dalla curdOP(λ)
va regolare λ 7→ OP(λ). Supponiamo anche che dλ 6= 0 per ogni λ nell’intervallo I
mandato
in
Γ,
supporto
della
curva.
Osserviamo fin da subito che il problema così posto è molto generale, e la sua
t
soluzione può coinvolgere equazioni che
si discostano molto dalla linearità. Focalizziamo l’attenzione su quest’altro punto:
n
saremmo tentati di introdurre come coordinate lagrangiane sul vincolo proprio quelle
che parametrizzano il cammino della massa m: non è però questo il modo più efficiente di procedere (un altro metodo farà
guadagnare maggior generalità). Introduciamo allora il parametro d’arco su Γ della curva OP(λ) (strumento preso a prestito dalla teoria della rettificazione di curve). Scelto
λ0 ∈ I, la lunghezza di Γ (non geometrica, ma dinamica, nel senso che tiene conto di
passaggi anche ripetuti per lo stesso punto) è
Z λ
dOP(ξ) s(λ) :=
dλ dξ
λ
0
Osserviamo che
ds
dλ
dOP(λ) = dλ > 0: ciò comporta che s è un diffeomorfismo sulla sua
immagine, ed ammette inversa s 7→ λ̄(s). Possiamo allora scegliere come parametro
lagrangiano libero su Γ quest’ultima funzione:
Ý
O
P(s) := OP(λ̄(s))
Ý
e il parametro è s 7−→ O
P(s)
Quanto fatto è il passo iniziale per costruire quello che si chiama triedro di Frènet.
Ý
d OP(s)
Ý
P(s)). Tale vettore ha norma 1:
Definiamo ds =: t(s) (vettore tangente a O
dOP(λ) d
λ̄(s)
kt(s)k = =1
dλ
ds λ=λ̄(s)
ricordando che
dλ(s) ds s
.
=1
ds(λ) .
dλ λ=λ̄(s)
Ora, cosa accade derivando t(s)? Supponiamolo costante: t′ (s) = 0, e dunque
possiamo pensare che t′ (s) mappi una sorta di curvatura di Γ: definiamo
dt(s) k(s) := ds (curvatura locale di Γ)
20
FISMAT 2008/2009
il versore parallelo a quest’ultimo (n(s) =
.
dt(s) ds ) è quello che viene detto versore
dt(s)
ds
normale a Γ: si ha infatti
n(s) · t(s) = 0
per ogni s
dt(s)
d
cosa che si dimostra facilmente: 0 = ds
(t(s) · t(s) = 2t(s) ds = 2n(s) · t(s). Se ora
definiamo b(s) = t(s) × n(s) otteniamo la terna cercata, solidale al moto e localmente
molto utile per “proiettare” lungo direzioni ortogonali le coordinate delle forze in gioco
nel sistema: molte caratteristiche dinamiche si possono ora sintetizzare facilmente. Per
esempio, la condizione di assenza di attrito in Φ(t) = φ t (t)t + φn (t)n + φ b (t)b diventa
φ t ≡ 0.
Ý
Il moto t 7→ O
P(s(t)) è allora dinamicamente possibile se (cercando funzioni t 7→
¨
s(t)) accade che mOP(t)
= F (OP(t)) + Φ(t). Troviamo una espressione per l’accelerazione nella terna di Frènet. Con un conto
a(t) =
d
dt
d
dt
Ý
O
P(s(t))
=
=
d
dt
d
Ý
dO
P ds
dt
ds d t
!
=
(t(s(t)) · ṡ(t)) =
dt
ds
· ṡ2 + t · s̈ =
ṡ2
ρ(s)
· n(s) + s̈ · t(s)
(4)
ove ρ(s) := (k(s))−1 è detto raggio di curvatura del cerchio osculatore a Γ. Se ora
proiettiamo l’ultima equazione ottenuta lungo i versori della terna di Frènet abbiamo
t:
n:
b:
Ý
ms̈ = t(s) · F(O
P(s(t)))
mṡ 2
Ý
= n(s) · F(O
P(s(t))) + φn (t)
ρ(s)
Ý
0 = b(s) · F(O
P(s(t))) + φ b (t)
Osserviamo che l’equazione ottenuta proiettando lungo t è una EDO di secondo ordine
Ý
in R. Ma la funzione t(s) · F(O
P(s(t))) è nota: siamo allora ricondotti allo studio del PC
ms̈(t) = f (s(t))
(⋆)
s(0) = s0
ṡ(0) = ṡ0
Equazioni del secondo ordine – Ritratti in Fase Cerchiamo allora di risolvere il
generico problema di Cauchy per una equazione del secondo ordine portata in forma
normale. La strategia è trovare un integrale primo alla (⋆), una volta ridottala ad un
sistema del primo ordine.
(
z := ( sṡ ) 7−→
21
ṡ = v
v̇ = f (s)
FISMAT 2008/2009
Allora gli eventuali integrali primi sono certe funzioni φ(s, ṡ). Tentiamo una strada
euristica: definiamo la funzione
Zs
1 2
f (ξ)dξ
E(s, ṡ) := ṡ −
2
s
0
condizione affinchè E(·) sia integrale primo è che la sua derivata di Lie lugo il campo sia
nulla: LX E = ∇E(s, ṡ) · X (s, ṡ) ≡ 0: scritta in altro modo
∂E
ṡ
∂s
∂E
f (s) = s̈(t) − f (s(t)) ṡ(t) = 0
∂ ṡ
OSSERVAZIONE. Il procedimento “a gambero”
si nota che s̈(t) −
è qualcosa di simile:
f (s(t)) = 0 ⇒ (s̈(t) − f (s(t)))ṡ(t) = 0 ⇒
d
dt
ṡ 2 (t)
2
−
Rs
s0
f (ξ)dξ .
Vorremmo mostrare che tra i due problemi non c’è alcuna differenza:
Rs
1 2
ṡ
−
f (ξ)dξ
s0
2
(⋆) ⇐⇒ (⋆⋆) = s(0) = s0
ṡ(0) = ṡ0
Una implicazione (⋆ ⇒ ⋆⋆) è piuttosto ovvia, come appena visto. Per quanto riguarda
l’altra, supponiamo di avere una curva che soddisfa (⋆⋆). Derivando ambi i membri
otteniamo
ṡs̈ − f (s)ṡ = 0 ⇒ ṡ(s̈ − f (s)) = 0
(♦)
Supponiamo ora ṡ(0) = ṡ0 6= 0 (velocità iniziale non nulla). Allora esiste tutto un intorno
(wlog, un intorno destro) di t = 0 tale che ṡ(t) 6= 0. Sia ora t 1 il primo punto in cui
s(t) = 0 (cioè t 1 è il primo istante di arresto). Se 0 ≤ t < t 1 da (◊) segue l’equivalenza
cercata. Ora, cosa accade in t 1 (dove nulla si può evincere da (◊), essendo ṡ = 0)?
Si ha s(t 1 ) = s1 (a priori qualunque cosa) e ṡ(t 1 ) = 0: a questo punto può essere
f (s1 ) nullo o no. Vedremo che una di queste due alternative è impossibile.
Se f (s1 ) = 0, il sistema ha raggiunto l’atto di moto (s1 , 0), configurazione di equilibrio
(perchè forza e velocità sono nulle). Esiste allora quantomeno la soluzione “quiete in s1 ”:
questo però viola il Teorema di esistenza e unicità di Cauchy–Lipschitz, perchè ad uno
stesso Problema di Cauchy (PC(t 1 ; s1 )) ci sarebbero due soluzioni diverse intersecantisi
in (t 1 , s1 ), la quiete eterna e la soluzione che arriva con velocità non nulla dai tempi
t < t 1 per approdare ferma in t 1 . Fare questa ipotesi allora è assurdo, e f (s1 ) 6= 0.
OSSERVAZIONE. (Importante!) Conoscendo un istante di arresto x ∗ per il sistema, abbi-
amo una informazione qualitativa del tutto generale: la forza F(·) agente sul sistema non
può annullarsi in x ∗ , pena la violazione del teorema di Cauchy.
Un altro risultato del tutto generale: gli istanti d’arresto si trovano in corrispndenza
delle inversioni del moto (perchè ṡ deve cambiare segno?7 ).
7
Sviluppando in serie ṡ(t) nell’intorno di t 1 si ha ṡ(t 1 ) = f (s(t 1 ))(t − t 1 ) + o(t − t 1 ): ma allora
mantenendosi costante il segno di f (s(t)) in un intorno di t 1 , ṡ cambia segno nello stesso intorno.
22
FISMAT 2008/2009
Il risultato è che, per un motivo o per l’altro, s̈(t) − f (s(t)) ṡ(t) = 0 implica che
s̈ − f (s) = 0 in tutto un intorno bucato di t 1 , e per continuità di s̈ − f (s), ciò implica da
solo che s̈(t 1 ) − f (s(t 1 )) = 0. Questo lungo discorso ha allora mostrato l’equivalenza tra
(⋆) e (⋆⋆). Torniamo ora al vecchio problema: supponiamo ṡ(0) 6= 0; esplicitando ṡ(t) in
forma normale, nell’espressione dell’integrale dell’energia, si ha
s
ṡ(t) = sgn(ṡ0 )
Z
ṡ02
s
+2
f (ξ)dξ
s0
e ora separando le variabili G(s) =
Rs
dλ
q
R
s0 sgn(ṡ ) ṡ 2 +2 s f (ξ)dξ
0
0
s
= t, e invertendo G si ottiene
0
una espressione per s(t). Questo è il prototipo di un sistema dinamico integrabile.
Torniamo anche a studiare la struttura dell’integrale primo di un sistema del secondo
ordine: non dovrebbe essere sfuggita l’“incarnazione” del già citato abbassamento dimensionale di cui godiamo quando troviamo un integrale primo al sistema. Diamo ora uno
2
sguardo più ravvicinato a questa idea. Anzitutto una nota terminologica: il termine ṡ2
Rs
è quello che si dice energia cinetica matematica, mentre il termine − s f (ξ)dξ è quello
0
che si dice energia potenziale matematica8 .
L’idea è semplice: fissato un certo ε vorremmo studiare le fibre di ε mediante E,
che nel piano (s, ṡ) sono curve (in genere varietà di dimensione 1). Dobbiamo allora
concetrarci per studiare l’insieme
(
E ← (ε) :=
(s, ṡ) :
ṡ2
2
Z
−
s
)
f (ξ)dξ = ε
s0
Osserviamo alcune cose:
1. Tutte le curve hanno grafici simmetrici rispetto all’asse s; ciò è dovuto al termine
quadratico in ṡ: se (s, ṡ) è soluzione, ovviamente lo è anche (s − ṡ).
2. Questo metodo di lavoro poggia da un punto di vista teorico sul principio di conservazione dell’energia totale di un sistema: fissato un valore per E(·), la somma
K + U di energia cinetica e potenziale deve essere costante.
3. Da quest’ultima considerazione discende che non tutti i valori di U sono ammissibili: l’energia cinetica è sempre una quantità non negativa, e dunque laddove la
somma delle due supera il valore fissato non possono esserci curve (cioè traiettorie di moto). Spesso si indica pittorescamente questa condizione dicendo che il
sistema è intrappolato in una “buca di potenziale” (in inglese potential well).
8
In opposizione alle energie cinetica e potenziale fisiche, che prevedono la comparsa di un fattore m di
massa del sistema dinamico.
23
FISMAT 2008/2009
4. Risultato del tutto generale, nel piano (s, ṡ) è univocamente fissato il verso di
percorrenza delle traiettorie: concorde alla direzione dell’incremento delle s nel
semipiano superiore, e discorde nell’inferiore. Nel caso (ad esempio) di orbite
chiuse (cioè nel caso in cui E ← (ε) ⊆ K ⋐ R2 ), tale senso di percorrenza è sempre
orario.
5. Il teorema della funzione implicita porge la risposta alla domanda: qualu curve
di livello di E(s, ṡ) sono (ovunque) regolari? La condizione è che sia massimo
rk d E(s, ṡ)|(s∗ ,ṡ∗ ) , cioè che
rk − f (s∗ ) ṡ∗ = 1
per ogni (s∗ , ṡ∗ ) punto di equilibrio per il sistema. Questo permette una osservazione non banale: le patologie degli insiemi di livello (cioè i valori per cui E ← (e)
non è una 1–varietà) si trovano nei punti tali che ṡ∗ = 0 e f (s∗ ) = 0, cioè negli
equilibri del sistema: tutti tali punti, per soddisfare la condizione ṡ∗ = 0 devono
stare sull’asse s.
Studiamo allora qualche esempio particolare: la procedura standard che attueremo è
quella per costruire il ritratto in fase di un sistema dinamico.
Pendolo Matematico Supponiamo che su una massa m > 0 vincolata a muoversi lungo una circonferenza di raggio R agisca la forza di gravità (cioè il vincolo sia privo di
attrito). Allora, introducendo opportune coordinate lagrangiane sul vincolo, e in particolare adottando la terna mobile di Frènet, introdotto il parametro d’arco s(t) = Rθ (t)9,
si ha (g è l’accelerazione di gravità)
t : ms̈ = −mg sin θ (t)
2
n : mṡρ = −mg cos θ (t) + φn (t)
b : 0 = φ b (t)
Allora mRθ̈ = −mg sin θ porta a dover risolvere il PC
¨
g
θ̈ =− R sin θ
θ (0)=θ0
θ̇ (0)=θ˙0
g
E’ facile risalire ad un integrale dell’energia per il sistema: E(θ , θ̇ ) = 12 θ̇ 2 − R (cos θ − 1).
g
Grafichiamo allora il termine di energia potenziale: U(θ ) = − R (cos θ − 1). Disegnare
le fibre di un fissato valore dell’energia E ← (e) è UNA QUESTIONE MISTICA. Facciamo
alcune osservazioni:
9
Si può arrivare a questa espressione per l’ascissa curvilinea
con elementari considerazioni geometriche,
R λ dOP(ξ) dξ,
per una volta che il risultato è già noto,
dλ
λ
ma attuare il procedimento standard s(λ) =:=
0
sarà un utile esercizio.
24
FISMAT 2008/2009
• Se e < 0 le fibre sono vuote;
• Se e = 0 le fibre di e sono i punti di equilibrio del sistema;
2g
• Supponiamo ora e = R . Ciò accade in θ = kπ: come detto i punti trovati risolvendo d E(θ , θ̇ ) = (0, 0) sono i punti critici in cui E(θ , θ̇ ) non è una 1–varietà, perchè
2g
in tali punti rk d E = 0. L’aspetto delle fibre di R sarà allora piuttosto strano:
sono curve che sembrano intersecarsi nei suddetti punti θ = kπ. Tali curve, dette
separatrici, dividono le curve nel piano delle fasi in due classi topologicamente
2g
equivalenti, l’ultima delle quali è quella delle fibre degli e < R ;
2g
• Se e < R il moto è intrappolato in una buca di potenziale: le traiettorie nel piano
delle fasi sono ellissi (ma attenzione, queste non sono le traiettorie della massa m
nello spazio!);
• Da ultimo, il caso e >
2g
,
R
trattato con considerazioni analoghe.
(y**2)/2-(1-cos(x))
7
6
5
4
3
2
1
0
-1
8
7
6
5
4
3
2
1
0
-1
-2
4
3
2
-8
1
-6
-4
0
-2
-1
0
2
-2
4
6
-3
8 -4
Notiamo varie conferme di quanto detto. I punti dove ṡ = 0 non sono zeri del campo
vettoriale, fissato un certo valore dell’energia le uniche curve ammissibili sono quelle
per cui la somma U(θ ) + K(θ̇ ) non “sfora” il valore prefissato, il verso di percorrenza
2g
delle curve chiuse (moti periodici) è univocamente determinato, le curve E ← ( R ), dette
separatrici del moto, dividono le curve nel piano delle fasi in due classi topologicamente
equivalenti, una omotopa ad S1 ed una a tutto R (queste sole sono infatti le classi di
equivalenza per i cappi in R2 ).
25
FISMAT 2008/2009
All’occhio più attento risulta però una incongruenza: come è possibile raggiungere
effettivamente gli equilibri in θ = π, se abbiamo mostrato che questo è vietato dal
Teorema di esistenza e unicità? Questa apparente contraddizione si risolve mostrando
che il tempo per giungere in θ = π è infinito. Con lo stesso metodo di separazione delle
variabili troviamo in fatti che il tempo impegato per arrivare dalla configurazione (θ0 , 0)
a quella (π, 0) è
r
Zπ
R
dξ
t=
p
2g θ
1 + cos ξ
0
questo integrale è non solo improprio, ma anche ellittico, dunque non risolvibile con
∼π Æ 1 1 2 ∼π
tecniche elementari. Possiamo però stimarne la convergenza: p 1
1+cos ξ
1
,
|ξ−π|
2
(ξ−π)
chiaramente divergente se ξ −→ π, e dunque t = +∞.
Considerazioni analoche permettono di trovare una espressione per il periodo di oscillazione: tale tempo è il doppio di quello impiegato a percorrere la distanza tra due
punti a velocità nulla:
Z θf
dξ
T (e) = 2
Æ
2g
θi
2e + R (cos ξ − 1)
Anche questo integrale è ellittico, ma non è questa l’informazione più interessante: possiamo infatti osservare che (cfr. anche Landau–Lifšic, “Mechanics”, 3; §11) il periodo di
oscillazione dipende dall’energia iniziale:
T (e) =
r Z
2
e
θf
θi
dξ
Æ
2g
1 − eR sin2 ξ
ED lineari del II ordine a coefficienti costanti L’esempio fisico è classico e ben studiato: problemi di questo tipo si incontrano quando si debbano studiare bilanci dinamici
che coinvolgono forze elastiche o campi newtoniani (posizionali) insieme a forze viscose
(dipendenti linearmente dalla velocità). Dato il Problema di Cauchy
a ẍ + b ẋ + c x = 0
x(0) = x 0
ẋ(0) = ẋ 0
(ED2)
l’insieme delle sue soluzioni ha struttura di spazio vettoriale su C. La strategia operativa
allora è volta a trovare una base di tale spazio: cerchiamo funzioni che facciano da test,
del tipo eλt . Troviamo in buona sintesi che i λ ∈ R che verificano l’equazione sono tali
che
eλt risolve (ED2) ⇐⇒ (aλ2 + bλ + c)eλt = 0
26
FISMAT 2008/2009
Ma allora, date le note proprietà di positività di eλt , l’unico modo è chepλ sia una radice
b2 −4ac
−b±
del polinomio aλ2 + bλ + c: ciò accade ovviamente per λ1,2 =
2a
dovremo discriminare le soluzioni a seconda del segno di ∆ = b2 − 4ac 10 .
, e allora
∆ > 0 In questo caso le due radici sono reali e distinte, e tutte le soluzioni al PC si trovano
come
x(t; c1, c2 ) = c1 eλ1 t + c2 eλ2 t al variare di c1 , c2 ∈ R
la strada per capire la dimensione di questo spazio di soluzioni è quella di trovare
un isomorfismo con un R–spazio vettoriale canonico: quest’ultimo è esattamente
lo spazio delle configurazioni, visto come insieme delle condizioni iniziali al tempo
t = 0: dati x 0 , ẋ 0 troviamo che
x(0; c1 , c2 ) = c1 + c2 = x 0
=⇒ λ11
ẋ(0; c1 , c2 ) = λ1 c1 + λ2 c2 = ẋ 0
e allora c1 =
x 0 λ2 −ẋ 0
λ2 −λ1
e c2 =
ẋ 0 −λ1 x 0
.
λ2 −λ1
1
λ2
c1 c2
=
x
0
ẋ 0
Si è allora stabilito che R2 ≃ R–spazio delle
soluzioni al PC. Allora la dimensione di quest’ultimo è 2, e ⟨eλ1 t , eλ2 t ⟩ è una sua
base.
b
∆ = 0 Le radici sono reali e coincidenti, λ1 = λ2 = λ = − 2a
. Allora vediamo che
λt
λt
⟨e , t e ⟩ è base dello spazio delle soluzioni: anzitutto risolve l’equazione differenziale, dato che (t eλt )′ = (1 + λt)eλt e (t eλt )′′ = (2λ + λ2 t)eλt :
[t(aλ2 + bλ + c) + (2aλ + b)]eλt = 0
per ipotesi
Considerazioni analoghe a prima portano a concludere che effettivamente queste
due funzioni “test” sono una base dell’R–spazio delle soluzioni a (ED2). In particolare dette come al solito x 0 , ẋ 0 le condizioni iniziali a t = 0, si ha c1 = x 0 ,
c2 = ẋ 0 − λx 0 .
∆ < 0 In quest’ultimo caso le soluzioni
di aλ2 + bλ + c sono complesse coniugate. Si
p
−∆
b
, β = 2a
, che le funzioni soluzione generano lo spazio
ha allora, posto α = − 2a
(α+iβ)t (α−iβ)t
(α+iβ)t
⟨e
,e
⟩. Ma ora, e
= eαt e iβ t , e dunque lo spazio delle soluzioni, di
dimensione 2 su C, è equivalente ad uno spazio di dimensione 4 su R. La strategia
è allora quella di isolare all’interno di questo spazio complesso uno reale di dimensione 2. Con semplici manipolazioni algebriche (ricordando che Rez = z+z̄
e
2
z−z̄
αt
αt
Imz = 2 ), si ha che lo spazio delle soluzioni è ⟨e cos β t, e sin β t⟩. Imponendo
il passaggio per la configurazione iniziale si ottiene infine
ẋ 0 − αx 0
αt
x 0 cos β t +
x(t; x 0, ẋ 0 ) = e
sin β t
β
10
Diamo
uno sguardo diverso: seportiamo
(ED2) ad un sistema del primo ordine, abbiamo
anche
0 1
0 1
x
c
b
b
c
sono proprio le radici di aλ2 + bλ + c (che è il suo
= − − ( v ): gli autovalori di A := − −
a
a
a
a
polinomio caratteristico). Che cosa sono gli autovettori di A?
ẋ
v̇
27
FISMAT 2008/2009
Forza Viscosa Applichiamo la teoria appena sviluppata ad un problema reale. Una
massa m > 0 risente di una forza elastica di costante h > 0 e di una forza viscosa (ad
esempio, a causa del suo essere immersa in un fluido di viscosità η, ed è quindi soggetto
all’equazione dinamica
mẍ + ηẋ + hx = 0
alle generiche condizioni iniziali x 0 , ẋ 0 : tutto dipende allora dal segno di ∆ = η2 − 4mh.
∆ ≥ 0 Le radici dell’equazione caratteristica sono reali ed entrambe negative (perché?).
Allora la soluzione generale
x(t; c1, c2 ) = c1 eλ1 t + c2 eλ2 t
c1 , c2 ∈ R
(FV1)
tende a zero se t −→ ∞, per ogni condizione iniziale: questa situazione è quella di
forte viscosità, la resistenza dissipativa della forza viscosa di coefficiente η smorza
il moto oscillatorio del sistema. Con analoghe considerazioni si studia anche il
caso limite ∆ = 0 di unica radice reale di molteplicità 2. L’equazione del moto è in
tal caso
k
(FV2)
x(t; c1, c2 ) = e 2m t (c1 + t c2 )
che tende anch’essa a 0 se t −→ ∞.
∆ < 0 Questo è il caso fenomenologicamente più ricco (soluzioni reali che sono parti reali
di soluzioni complesse coniugate). Siamo in presenza di una debole forza viscosa,
e distinguiamo due casi fisicamente molto diversi. Uno, idealizzato, di viscosità
η = 0, laddove allora l’equazione dinamica del sistema è ẍ + mh x = 0, che ha come
soluzione l’integrale generale
x(t; c1, c2 ) = c1 e iωt + c2 e−iωt
(NV1)
Æ
con ω := mh . Lo spazio delle soluzioni è allora ⟨cos ωt, sin ωt⟩ (sempre ricordando la possibilità di esprimere Rez, Imz con operazioni lineari). Vale la pena notare
che mediante alcuni passaggi di trigonometria elementare si ha
Acos ωt + B sin ωt = ρ (A/ρ) cos ωt + (B/ρ) sin ωt
p
(ρ :=
A2 + B 2 )
(ρ è l’ampiezza iniziale), e posto φ0 := arccos(A/ρ) (fase iniziale o anomalia del
moto) si ottiene
x(t; C, φ0) = C cos(ωt + φ0 )
(NV2)
scrittura sintetica e spesso comoda nei casi pratici. Notiamo altresì che tutti i moti
sono periodici e le orbite tautocrone (si nota svolgendo l’integrale per trovare il
periodo, p
tale integrale ha primitiva elementare): il periodo di oscillazione T =
m
2π
=
2π
è un parametro solamente strutturale, intrinseco alle caratteristiche
ω
h
meccaniche del sistema.
28
FISMAT 2008/2009
Caso fisicamente più realistico, se η 6= 0, η ≪ 1 (debole viscosità, ad es. quella
cui è soggetto un corpo oscillante in un fluido rarefatto) assistiamo al fenomeno
dell’oscillazione smorzata: si ha
x(t; x 0, ẋ 0 ) = Aeαt cos(ωt + φ0 )
(DV)
soluzione ottenuta rimaneggiando quella generica con simili identità trigonometriche.
Un riassunto grafico sommario: a prescindere dal segno di ∆ l’origine è un equilibrio
stabile, ed è un attrattore per tutti i moti tranne nel caso in cui η = 0 (le traiettorie nel
piano delle fasi sono ellittiche, tautocrone).
60
5
10
15
20
25
50
-10
40
-20
30
20
-30
10
-40
-2
-1
1
2
1
0.6
0.8
0.4
0.6
0.2
0.4
-1
-0.5
0.5
1
0.2
-0.2
1
2
3
4
5
6
1
4
0.75
0.5
2
0.25
-0.75 -0.5 -0.25
2
-0.25
-0.5
4
6
8
0.25
0.5
0.75
1
-2
-4
-0.75
-6
OSSERVAZIONE. Una prima complicazione alla teoria appena delineata coinvolge lo studio
di ED lineari non omogenee: l’esempio fisico che qui esamineremo è classico, e cioè
quello di un oscillatore armonico smorzato da una resistenza viscosa e forzato da una
certa f (t) ad andamento sinusoidale. Il sistema dinamico in studio è allora quello di
equazione
a ẍ + b ẋ + c x = f (t)
(5)
29
FISMAT 2008/2009
supponiamo ora che f (t) = B sin Ωt per una certa frequenza Ω. Matematicamente parlando lo spazio delle soluzioni di 5 è uno spazio affine, che ha come spazio vettoriale
sottostante lo spazio delle soluzioni dell’omogenea a ẍ + b ẋ + c x = 0. La soluzione di 5
consisterà allora dell’integrale generale dell’omogenea e di una soluzione particolare che
di solito si determina “a mano”, cercandola tra le soluzioni che hanno la stessa struttura
del termine disomogeneizzante.
Sappiamo allora che
a ẍ + b ẋ + c x = 0 ⇐⇒ x(t; c1, c2 ) = c1 cos ωt + c2 sin ωt
e cerchiamo una soluzione particolare del tipo Asin Ωt: derivando e sostituendo direttamente si ha
(−AΩ2 + ω2 A) sin Ωt = B sin Ωt ⇐⇒ x̄(t) =
B
sin Ωt
2
ω − Ω2
sempre vera se ω 6= ±Ω. Laddove ciò succeda si assiste ad un fenomeno curioso che
prende il nome di risonanza: passiamo al limite in
BΩ
B
1
ẋ 0 − 2
sin Ωt
sin ωt + 2
x C (t) = x(t; x 0, ẋ 0 ) + x̄(t) = x 0 cos ωt +
2
ω
ω −Ω
ω − Ω2
per Ω −→ ω:
lim x C (t; x 0, ẋ 0 ) = x 0 cos ωt +
Ω−→ω
ẋ 0
ω
sin ωt + lim
Ω
sin Ωt − ω
sin ωt
Ω−→ω
ω2 − Ω 2
che si può fare con de l’Hôpital e che porge
Ω−→ω
x C (t) −−−→ x 0 cos ωt +
ẋ 0
ω
sin ωt −
1
2
t cos ωt +
1
2ω2
sin ωt
Il termine riquadrato è lineare in t, e distrugge (spesso nel vero senso della parola) la
periodicità del sistema. L’ampiezza delle oscillazioni cresce in modo indefinito fino a
portare (in situazioni ideali con nessun’altra smorzante) alla distruzione del sistema.
Stabilità agli equilibri
4 (Configurazione Lyapunov–stabile). Sia ẋ = X (x) una equazione differenziale del primo ordine, definita dal campo X (#): Rm −→ Rm . Diciamo che x ∗ è un punto
di equilibrio stabile secondo Lyapunov se
DEFINIZIONE
• x ∗ è un equilibrio, cioè X (x ∗ ) = 0;
• per ogni ε > 0 esiste δ > 0 tale che, se x 0 ∈ B(x ∗ , δ] ogni soluzione al PC(0, x 0 )
appartiene a B(x ∗ , ε] per ogni t ≥ 0.
30
FISMAT 2008/2009
In altre parole il punto x ∗ è stabile alla Lyapunov se ogni soluzione passante per un
x 0 ∈ B(x ∗ , δ] non esce da B(x ∗ , ε].
OSSERVAZIONE. Ogni equilibrio non L–stabile è instabile: si abbatte la nozione (impre-
cisa)di equilibrio indifferente.
OSSERVAZIONE. Questa determinazione degli equilibri stabili presuppone di poter conoscere
le soluzioni di ẋ = X (x), cosa spesso impossibile. Servono allora delle versioni “edulcorate” dello stesso teorema che permettano di prescindere da questo fatto.
5 (Lyapunov–versione topologica). Sia x ∗ un equilibrio per X (x). Se esiste una
funzione W ∈ C 0 (U, R) con U ⊆ Rm aperto, tale che
TEOREMA
• W (x) > 0 per ogni x ∈ U \ {x ∗ }, e W (x ∗ ) = 0;
• W (x(t)) è monotona decrescente lungo le soluzioni di ẋ = X (x) (cioè se t 1 < t 2,
W (t 1 ) ≥ W (t 2 ));
allora x ∗ è un equilibro L–stabile.
Dimostrazione. Sia ε > 0 fissato, e a := min x∈∂ B(x ∗ ,ε] W (x) (tale minimo esiste perché
W (#) è continua sul compatto B(x ∗ , ε]). Valendo la proprietà (2), a > 0: usiamo a
come ε′ nel constatare la continuità di W in x ∗ . In corrispondenza di tale a esiste allora
δ > 0 tale che per ogni x ∈ B(x ∗ , δ] si ha |W (x) − W (x ∗ )| < a. Allora per (1) |W (x)| =
W (x) < a. Ora, se t > 0 si ha W (x(0; x 0 )) ≥ W (x(t; x 0)). Se per assurdo esistesse
t̂ tale che x( t̂; x 0 ) ∈
/ B(x ∗ , ε′ ], esisterebbe anche t̃ tale che x( t̃; x 0 ) ∈ ∂ B(x ∗ , ε′ ]: ora
W (x( t̃; x 0 )) ≥ a per definizione di a. Assurdo, perché dovrebbe essere anche W (x) <
a.
6 (Lyapunov–versione differenziale). Siano X (#), x ∗ un campo vettoriale e un
suo equilibrio. Supponiamo W : U −→ R almeno C 1 , a valori in U ⊆ Rm . Se
TEOREMA
• W (x) > 0 per ogni x ∈ U \ {x ∗ }, e W (x ∗ ) = 0;
• LX W (x) ≤ 0 per ogni x ∈ U 11 ;
11
Ricordando che
Pm
LX W (x) := ∇W (x(t)) · ẋ(t) = ∇W (x(t))X (x(t)) = j=1
31
∂W
∂ xi
X i (x).
FISMAT 2008/2009
allora x ∗ è un equilibrio stabile.
Dimostrazione. Omessa. Osserviamo che la condizione posta equivale ad avere W % in
U, stabilito senza conoscere alcuna soluzione.
Vi è, a volte, bisogno di una condizione di stabilità più forte:
5 (Stabilità asintotica). Sia X (x ∗ ) = 0. Allora x ∗ si dice equilibrio asintoticamente stabile se
DEFINIZIONE
1. x ∗ è L–stabile
2. lim t−→+∞ x(t; x 0) = x ∗ per ogni x 0 in un opportuno intorno di x ∗ .
Osserviamo a margine che la prima condizione non è ridondante: esistono (vedremo un
esempio) equilibri tali che valga (2) ma che non sono L–stabili. Ancora, si possono fare
esempi di equilibri L–stabili che non sono asintoticamente stabili.
7 (L–stabilità asintotica). Sia x ∗ un equilibrio per X (#) ∈ C 0 (Rm ). Sia W : U −→
R stretta positiva in U \ {x ∗ } e LX W (x) 0 in U \ {x ∗ }, LX W (x ∗ ) = 0. Allora x ∗ è
asintoticamente stabile.
TEOREMA
m
Dimostrazione. Omessa.
Facciamo un esempio di equilibrio L–stabile non asintoticamente. Disponiamo di un oscillatore p
armonico di
equazione caratteristica ẍ + ω2 x = 0 (ω := km). Tale
sistema ha un integrale primo evidente, dell’energia totale:
2
h
x 2 . Proprio tale E(#, #) è una possiE(x, ẋ) = ẋ2 + 2m
bile funzione di Lyapunov che attesti la stabilità dell’origine
(nello spazio tridimensionale è un paraboloide a base ellittica, con concavità rivolta verso l’alto). Ma (0, 0) non è asintoticamente stabile: fenomenologicamente, detti a, b i semiassi dell’ellisse, ogni soluzione si mantiene definitivamente
fuori della palla B(x ∗ , min{a, b}].
2
1
0
-1
-2
-2
-1
0
1
2
Sistemi di particelle in campi di Forze Fissiamo n > 1 e per ogni i = 1, . . . , n siano
mi >= le masse dei punti materiali costituenti un sistema meccanico. Supponiamo ora
che tale sistema libero sia soggetto a forze puramente posizionali Fi : R3n −→ R3 , e
pensiamo le componenti di F = (F1 , . . . , Fn ) come componenti di una forma differenziale
(Forma lavoro)
δL F : R3n −→ (R3n )∗
n
X
Fi (OP) · δPi
(OP1 , . . . , OPn ) 7→ δL F (OP) =
(6)
i=1
32
FISMAT 2008/2009
(ove δPi (ν1 , . . . , νn ) = (νi1 , νi2 , νi3 ), i–esima delle triplette di coordinate degli n punti del
sistema).
Pn
Ricordiamo che la forma Θ := α=1 ϑα (x)d x α è chiusa se vale
∂ ϑα
∂ xβ
−
∂ ϑβ
∂ xα
= 0 per ogni α, β = 1, . . . , n
e nel caso in cui il dominio di Θ sia semplicemente connesso questa condizione è sufficiente all’esattezza. In tal caso si scrive δL F = −dU (la forma lavoro è esatta se è il
differenziale di una funzione scalare, la convenzione sul segno ha ragioni storiche).
La funzione U : R3n −→ R è detta energia potenziale del sistema di forze, e il campo
F(#) è detto conservativo: esempi di campi conservativi sono molto noti e studiati.
• Forza gravitazionale: date due masse m1 , m2 l’interazione gravitazionale è un campo definito in R3 × R3 \ {(x, x) | x ∈ R} di espressione
m1 m2
(OP2 − OP1 )
F12 = −F21 = −γ
|OP2 − OP1 |3
m m
2
Un calcolo diretto mostra che la funzione U(OP) = −γ |OP 1−OP
è una energia
2
1|
potenziale per F(#). Si ha infatti (con l’immersione banale data dalle coordinate
cartesiane libere)
m1 m2
U((x 1 , y1 , z1 ), (x 2 , y2 , z2 )) = −γ p
(x 2 − x 1 )2 + ( y2 − y1 )2 + (z2 − z1 )2
m m
1 2
e allora per esempio ∂∂ xU = −γ |x −x
3 (x 2 − x 1 ). In modo analogo per tutte le altre
1
2
1|
coordinate si ottiene infine
m1 m2
(OP2 − OP1 ) = F12 = −F21
(7)
∇OP1 U = −γ
|P1 P2 |3
m1 m2
∇OP2 U = −γ
(OP1 − OP2 ) = F21 = −F12
|P1 P2 |3
• Forza Elastica: Se F1 = −F2 = hP1 P2 , è facile convincersi che U(OP1 , OP2 ) =
1
h|P1 P2 |2 è un potenziale di F.
2
• Forza centrifuga: Fc f (OP) := ω × (ω × OP). Mostriamo che questo campo di forze
ammette il potenziale U(OP) = − 12 m|ω × OP|2 . Posto OP = x ∈ R3 , ricordando
che esiste Ω ∈ Skew3 (R) tale che ω × x = Ωx, scriviamo
1
1
U(x) = − m(Ωx)2 = − mΩx · Ωx
2
2
1
1
= − mΩ t Ωx · x = mΩ2 x · x
2
2
(8)
dato che At A = −A2 per ogni A ∈ Skewn (R). Ma allora ∇U(x) = 21 m∇Ω2 x · x =
mΩ2 x = mΩ(Ωx) = mω × (ω × x) = −Fc f .
33
FISMAT 2008/2009
Sistemi Vincolati Abbiamo associato ad
un sistema di n punti materiali soggetti a
forze posizionali la forma lavoro δL F =
P
n
F (OP)δPi ∈ (R3n )∗ . Supponiamo ora
α=1 α
che il sistema sia vincolato a muoversi in
modo liscio su una certa varietà S di dimensione N , indipendente dal tempo. Abbiamo bisogno di effettuare alcuni passaggi
concettuali:
TOP s
• Il primo, coordinatizzare S in modo
opportuno ed esprimere le componenti
delle forze in gioco con tali coordinate;
S
• Restringere poi opportunamente l’azione
della forma δL F alla varietà in esame.
Facciamo prima una osservazione epistemica: troveremo che il modo “giusto” di restringere δL F è di considerare punto per punto su S i vettori del solo spazio tangente
TOPS: questo è “fisicamente” intuitivo, dato che essendo il punto vincolato (da opportune reazioni che bilanciano le componenti ortogonali di F) subisce solo l’effetto
delle componenti tangenti (sulle quali il vincolo non agisce, per ipotesi di liscezza).
Supponiamo allora di aver coordinatizzato S mediante un opportuno diffeomorfismo
Ý
O
P : U ⊆ RN −→ S e scriviamo
n
X
∗
Fα (OP)|OP=OP(q)
δL F |S (OP) =
Ý δPα ∈ (TOP
Ý S)
α=1
Ý
tale forma agisce sui vettori v ∈ TOP(q)
Ý S = im d O P(q) e i vettori di cui si “ciba” hanno la
forma
!
N
N
X
X
Ý1
Ýn
∂ OP
∂ OP
v=
dqh , · · ·
dqh
∂ qh
∂ qh
h=1
h=1
ma allora
δ L F (OP) =
n
X
α=1
Fα (OP) · δPα =
n
X
α=1
=
le Qh :=
Pn
α=1
Ý
Fα (OP(q))
·
Ý α (q)
∂ OP
∂ qh
Ý
Fα (O
P(q)) ·
N
X
n
X
h=1
α=1
N
X
Ý
∂O
P α (q)
h=1
∂ qh
Ý
Fα (OP(q))
·
dqh =
Ý
∂O
P α (q)
∂ qh
!
dqh =:
N
X
Qh (q)dqh (9)
h=1
si dicono componenti lagrangiane della forza.
˙ t))
Corollario abbastanza immediato, se le forze dipendono dal tempo (Fi (OP, OP,
allora le Qh(q) diventano
!
n
X
Ý
∂ OP
∂ OP i
Ý
Fi t, O
Qh(q, q̇, t) =
P(q),
q̇ ·
∂q
∂ qh
i=1
34
FISMAT 2008/2009
Altra conseguenza, meno immediata: se Fi = −∇i U allora anche Qh(q) = −
forze sono conservative, anche le componenti lagrangiane lo sono), e vale
δ L F |S =
n
X
(−∇α U(OP)
α=1
N
X
Ý
∂O
P(q)
h=1
∂ qh
∂ U(q)
∂ qh
(=se le
N
n
X
X
Ý
∂O
P α (q)
Ý
dqh = −
dqh =
∇α U(OP(q))
∂
q
h
h=1 α=1
= (regola della catena) = −
N
X
∂
∂ qh
h=1
Ý
(U ◦ O
P)(q)dqh = −dU (q) (10)
Vincoli Lisci La necessità di modellizzare vincoli lisci nasce dalla semplificazione operativa portata dalla loro definizione: se le reazioni vincolari hanno componente nulla
nello spazio tangente alla varietà S cui è vincolato il punto, il problema della determinazione dei moti si disaccoppia e diventa possibile (o più probabile riuscire a)integrare il
sistema. Diamo allora le definizioni necessarie: sia S t ,→ R3n un vincolo (anche mobile),
e sia come al solito TOP S t lo spazio tangente ad un suo punto OP. Similmente indicheremo con δP ∈ TOP S t un generico “vettore tangente infinitesimo” o “virtuale” su TOP S t
(considerati ad un dato istante, con S t̄ congelata all’istante t̄. Il vincolo S t si dice allora
liscio se la classe delle reazioni vincolari ammissibili ΥS,OP,v,t è
(
Φ = (φ1 , . . . , φn) ∈ R3n | δL F
=
n
X
α=1
!
φα · δPα
)
=0
per ogni δPα ∈ TOP S t . Il significato “concreto” della cosa è evidente: le forze vincolari,
priva di componente tangente al vincolo, hanno l’unico effetto di fissarne la posizione
(=ridurne i gradi di libertà), senza accelerarlo né rallentarlo.
E’ allora possibile caratterizzare in modo geometricamente stringente molte situazioni reali: osserviamo collateralmente come questa definizione di vincolo liscio sia
la più generale, dato che ingloba in sé anche alcuni casi (per quanto particolari) di
sistemi non olonomi, come per esempio il puro rotolamento, in cui il vincolo è liscio
anche se entrano in gioco forze frenanti (e anzi su un piano totalmente scabro le forze
di attrito sono infinitamente potenti). La definizione di vincolo privo di attrito è allora
∗
Ý
ΥS,OP,v,t = (TOP S t )⊥ = (ker d OP(q))
Altri Teoremi sulla stabilità
TEOREMA 8 (Lagrange–Dirichlet). Poniamoci in presenza di un sistema meccanico di n
punti materiali soggetto a vincoli lisci su una varietà S ,→ R3n parametrizzata da una
Ý
immersione q 7→ O
P(q) da U ⊆ RN in R3n . Supponiamo che tale sistema sia soggetto a
forze di tipo
(1)
1. Qh (q) = −
35
∂ U (q)
,
∂ qh
componenti conservative in coordinate lagrangiane.
FISMAT 2008/2009
(2)
2. Qh (q, q̇), dipendenti anche dalla velocità (sono termini che compaiono derivando
PN
(2)
le forze in coordinate libere), tali che ΠQ (2) = h=1 Qh (q, q̇)q̇h ≤ 0
h
(1)
(2)
Allora, se q∗ è un punto tale che Qh (q∗ ) = Qh (q∗ ) = 0 per ogni h = 1, . . . N , esso è
stabile se è un minimo locale stretto per U (#).
Dimostrazione. Usiamo un’opportuna funzione di Lyapunov per mostrare che q∗ è stabile: sia W (q, q̇) = T (q̇) + U (q) − U (q∗ ): in tal modo W (q∗ ) = 0. Dobbiamo mostrare
che negli altri punti W (q) > 0. Essendo minimo stretto locale, esiste tutto un intorno
Itale che U (q) − U (q∗ ) > 0 per ogni q ∈ I \ {(q∗ , 0)}. Grazie alla positività di T (q̇) si
conclude. Vediamo cosa accade lungo i moti:
d
dt
W (q, q̇) =
=
N
X
h=1
(1)
d
dt
T (q̇) +
Qh (q)q̇h +
N
X
h=1
d
dt
U (q) =
(2)
Qh (q, q̇)q̇h + ΠΦ +
N
X
∂ U (q)
h=1
∂ qh
q̇h =
N
X
h=1
(2)
Qh (q, q̇)q̇h ≤ 0 (11)
per tutte le ipotesi fatte.
TEOREMA
9 (Hessiano non Degenere). Sia S un sistema soggetto
a vincoli lisci e fissi su cui
∂ U (q ∗ )
agiscono solo forze conservative. Esista poi q∗ tale che
= 0 e h = det HU (q∗ ) =
∂ qh
h
2 ∗ ∂ U (q )
6= 0. Allora q∗ è stabile se e solo se HU (q∗ ) è definita positiva.
det ∂ q ∂ q
h
k
hk
Dimostrazione. Omessa. Una delle implicazioni è il teorema precedente, e THND costituisce una condizione anche necessaria alla stabilità: resta però da sottolineare che ora
possono agire solo forze conservative.
Esaminiamo alcuni problemi.
• Una massa m è vincolata senza attrito al piano x y, dove subisce l’effetto di alcune
forze:
- Attive conservative: F g + Fel = −gz − hOP (gravitazionale ed elastica)
˙ (viscosa)
- Attive non conservative: F v = −ηOP
- Apparenti: Fc f + FC o (centrifuga e Coriolis)
Ci proponiamo di studiare la dinamica del sistema trovando gli equilibri e studiando la loro stabilità al variare dei parametri strutturali.
L’immersione vincolare usata è la banale ι : R2 −→ R3 che manda (q1 , q2 ) in (q1 , q2 , 0).
Il moto è dinamicamente possibile se
¨ =F g + Fel + F v + Fc f + FC o + Φ
mOP
˙ − 2mω × OP
˙ + mω × (ω × OP) + Φ
=mg − hOP − ηOP
36
(12)
FISMAT 2008/2009
Proiettando sui tre assi si ha
2
mẍ = −(h − mω )x − ηẋ + 2mω ẏ
m ÿ = −(h − mω2 ) y − η ẏ + 2mωẋ
mz̈ = −mg + φz
Osserviamo che accade quel che speravamo, il problema vincolato si disaccoppia.
Un caso banale, h = mω2 , si risolve immediatamente, perché in tal caso si ottiene la verità vuota 0 = 0, ed ogni punto è un equilibrio (a fortiori, tutti tali
equilibri sono stabili alla Lyapunov). Supponiamo allora α := h − mω2 6= 0: in
tal caso (x ∗ , y ∗ ) = (0, 0) è l’unico equilibrio. Studiamo il potenziale delle forze
conservative: si nota subito che esso è − 21 α(x 2 + y 2 )a meno di costanti. Per
quanto riguarda le forze dissipative dobbiamo calcolare ΠQ̃ν = Q̃ νx · ẋ + Q̃ νy · ẏ =
−η(ẋ x + ẏ y)(x d x + y d y) = −η(ẋ 2 − ẏ 2 ) ≤ 0. La forza di Coriolis poi, essendo
di tipo giroscopico, non è dissipativa: ΠQC o = 0. Da ultimo, se supponiamo α > 0
il punto (0, 0) è d’equilibrio ed è minimo assoluto. Invocando TLD sappiamo che è
l’unico equilibrio stabile.
OSSERVAZIONE. Modifichiamo il sistema rimuovendo la forza viscosa:
(
mẍ = −(h − mω2 )x + 2mω ẏ
m ÿ = −(h − mω2 ) y + 2mωẋ
e utilizziamo un metodo intelligente per trovare l’equazione del moto, immergendo
il sistema nei complessi: definiamo ζ := x + i y, moltiplicando ambo i membri per
i e sommandoli tra loro si ha l’equazione del secondo ordine
mζ̈ + 2imωζ + αζ = 0
−iωt
che sappiamo
(c1 e iΩt + c2 e−iΩt ),
p risolvere: ha integrale generale ζ(t; c1 , c2 ) = e
ove Ω := h/m. Parte reale e immaginaria di ζ(t) costituiranno allora le equazioni
orarie cercate:
Reζ(t) =x(t) = · · · = A1 cos((ω + Ω)t + φ1 ) + B1 cos((ω − Ω)t + ψ1 )
(13)
Imζ(t) = y(t) = · · · = A2 cos((ω + Ω)t + φ2 ) + B2 cos((ω − Ω)t + ψ2 )
A queste condizioni, la stabilità in (0, 0) esiste per ogni h.
(
• Disponiamo del sistema dinamico di equazione
37
ṙ = r(1 − r)
θ̇ = sin2 θ
FISMAT 2008/2009
nel piano parametrizzato dalle polari (r, θ ) ∈ [0, +∞[×[0, 2π[, che mandano
(r r, θ ) in (r cos θ , r sin θ ). Cerchiamone gli equilibri: ṙ = 0 ⇐⇒ r = 0, 1 e
θ̇ = 0 ⇐⇒ θ = 0. In generale se r > 1 ṙ < 0(cioè r va a calare), e viceversa se
r < 1. In modo analogo, θ̇ > 0 per ogni θ , e queste due considerazioni fissano il
verso di percorrenza: sempre antiorario, spiraleggiante verso l’esterno se r < 1, e
verso l’interno se r > 1. Possiamo allora mostrare che (1, 0) è un attrattore globale per il sistema, integrando direttamente l’equazione. Separiamo le variabili,
risolviamo, e otteniamo
et
r(t) = r0
1 + r0 (e t − 1)
λ− t
θ (t) = 2 arccotan
2
(14)
ove r0 , λ sono opportune costanti. Visibilmente (r(t), θ (t)) −→ (1, 0) se t −→
+∞, e allora P = (1, 0) un attrattore per qualunque orbita. Non è però un equilibrio stabile alla Lyapunov, perché la scelta di un ε > 0 e di un dato iniziale
all’interno di una palla di raggio δ centrata in P non implica che le soluzioni rimarranno intrappolate in una ε–palla. Ogni soluzione infatti arriva all’attrattore
dopo aver fatto almeno un giro brandeggiando la circonferenza di raggio 1 (che in
qualche senso, potrebbe essere additata come separatrice dei moti).
• Elastica di Euler, o meccanica del cotton–fioc.
Modellizziamo un sistema dinamico: una massa m è fissata all’estremo di un’asta
lunga ℓ incernierata all’altro estremo a una sua gemella, unite tra loro da una
molla bilaterale di costante h > 0 (che serve a prediligere la posizione verticale
delle due aste). L’estremo finale della seconda asta può ruotare nel piano xz fissato
all’origine, senza attrito. Il sistema è olonomo unidimensionale, parametrizzabile
(ad esempio) con l’angolo θ tra la seconda asta e l’asse z: allora θ ∈ [−π/2, π/2].
Studiamo gli equilibri come zeri di U(θ ):
U (θ ) = U g (θ )+U el (θ ) = 2mgℓ cos θ +
38
h
2
(π − 2θ )2 + (π + 2θ )2 = 2mgℓ cos θ +4hθ 2 +K
FISMAT 2008/2009
4h
θ.
dunque U ′ (θ ) = −2mgℓ sin θ + 8hθ ⇒ U ′ (θ ) = 0 se e solo se sin θ mgℓ
Questa si può risolvere per via grafica, distinguendo tre casi:
4h
1. (piccola massa) λ = mgℓ
> 1, e allora l’unico equilibrio è θ = 0. Tale equilibrio è stabile per THND (è un minimo per U ′′ (θ ). Il sistema tende allora a
tornare nello stato iniziale dopo la sollecitazione.
2. (grande massa) λ =
4h
mgℓ
< 1, alla condizione aggiuntiva
2
π
< λ (affinché
2
θ
π
e possa intersela retta kθ abbia pendenza maggiore della retta limite
care sin θ . A queste condizioni esistono tre equilibri, uno dei quali (l’origine)
diviene instabile (U ′′ (0) < 0). Riguardo gli altri, dettili θ1∗ , θ2∗ , si ha
tan θ1∗
′′
∗
∗
U (θ1 ) = 2mgℓ cos θ1
− 1 > 0 ⇐⇒ tan θ1∗ > θ1∗ , vero
∗
θ1
∗
tan
θ
2
− 2 > 0 ⇐⇒ tan θ2∗ > θ2∗ , vero
(15)
U ′′ (θ2∗ ) = 2mgℓ cos θ2∗
θ2∗
e dunque questi equilibri sono stabili.
3. Il caso critico λ = 1 richiede di studiare le derivate di U fino alla quarta:
U (4) (0) > 0, ed è l’unico equilibrio stabile.
Torniamo a discussioni sulla stabilità di sistemi:
10. Sia ẋ = X (x) una ED con X : Rm −→ Rm . Se x ∗ è un equilibrio L-stabile per
X (#) allora il PC(0, x ∗ ) ammette come unica soluzione nel futuro la quiete in x ∗ .
TEOREMA
Dimostrazione. Per assurdo, sia x̃(t) 6= x ∗ per t > t̄. Allora λ := |x̃( t̄ + ε) − x ∗ | > 0, e
fissata la palla B(x ∗ , λ/2] la soluzione x̃(t) vi esce. Assurdo, poiché x ∗ è L-stabile.
p
Esempio. Consideriamo il PC(0, 0), ẋ = −2 sgn x |x|. Visibilmente x ∗ = 0 è un equilibp
rio, e altrettanto visibilmente X (x) = −2 sgn x |x| non è lipschitziano in nessun intorno
di x ∗ . Con una opportuna funzione di Lyapunov si può però determinare la stabilità nel
futuro di x ∗ : verificare che una tale funzione è W (x) = |x|.
EDO lineari non scalari Lo spazio vettoriale Mm (R) si atteggia naturalmente ad algebra normata con la norma operatoriale12 (o sup-norma, o norma-infinito)
kAk∞ := sup |Ax|
x∈Sm−1
sono di facile verifica alcune disuguaglianze:
12
Non è, questa, l’unica norma possibile su Mm (R): ricordiamo ad esempio la norma A 7→ max{ai j |
Pn
i, j = 1, . . . , m} oppure A 7→ i, j=1 ai j . Tutte queste norme sono ovviamente equivalenti da un punto di
vista topologico: per quali vale la disuguaglianza kABk ≤ kAk kBk?
39
FISMAT 2008/2009
• kA + Bk∞ ≤ kAk∞ + kBk∞ (discende dalla disuguaglianza triangolare per k#k∞ );
• kA ◦ Bk∞ ≤ kAk∞ kBk∞ (fatto che in particolare rende Mm (R) algebra di Banach).
P
Ha dunque senso definire una serie di potenze a valori in Mm (R) del tipo n∈N an M n per
(an ) ⊂ R e M ∈ Mm (R).
DEFINIZIONE
6 (Matrice Esponenziale). La serie di potenze
∞
X
Mn
n=0
n!
converge normalmente in tutto Mm (R) e definisce una funzione exp: Mm (R) −→ Mm (R)
detta esponenziale della matrice M .
Dimostrazione. Per la convergenza basta considerare che
∞
∞
X
X
kM k∞
Mn
−→ ex p(kM k∞ )
≤
n=0 n! n!
n=0
∞
la funzione che associa ad M ∈ Mm (R) la matrice exp(M ) è allora ben definita.
La mappa esponenziale gode di alcune proprietà fondamentali:
• Se AB − BA = O allora vale una proprietà gruppale da (Mm (R), +) a (GLm (R), ·),
cioè exp(A + B) = exp(A) exp(B) (la commutazione è in generale necessaria);
• exp(A) è invertibile, e vale exp(A)−1 = exp(−A) [in particolare exp(O) = 1m ]
• Definita la mappa R −→ Mm (R), t 7→ exp(tA), si ha subito che (exp(tA)′ =
Aexp(tA)
Dimostrazione. La proprietà gruppale, nota la commutazione, si ricava dalla definizione
(la nozione di prodotto alla Cauchy è la stessa in ogni algebra di Banach), così come il
fatto che exp(O) = 1. Per il resto, si applica il teorema di derivazione per serie, essendoci
convergenza totale:
!′
X t n−1 An−1
X t nAn
= Aexp(tA)
=A
n!
(n − 1)!
n∈N
n∈N
Esempio. Vogliamo studiare il sistema al secondo ordine dell’oscillatore armonico libero
2
ẍ + ω x = 0
x(0) = x 0
ẋ(0) = ẋ 0
40
⇐⇒
ẋ
v̇
=
0 1
−ω2 0
( xv ) =: ż = Az
FISMAT 2008/2009
(si è portato il sistema al primo ordine). La soluzione del PC(x 0 , ẋ 0 ) è allora z(t) =
exp(tA). Il calcolo da compiere è in generale impossibile da svolgere direttamente, ma
in questo caso notiamo che le potenze di A seguono una legge ricorsiva semplice:
′′
A k = (−1)k ω2k 1
A2k+1 = (−1)k ω2k A
si ha allora
∞
X
(tA)n
n=0
n!
=
∞
X
(−1)n ω2n t 2n
n=0
!
1+
(2n)!
∞
X
(−1)k t 2k+1ω2k+1
n=0
(2n + 1)!
!
A
cioè exp(tA) =
. Notiamo che tale espressione da
sin ωtA =
x
“gratuitamente” la coppia (x(t; x 0, ẋ 0 ), ẋ(t; x 0 ẋ 0 )) mediante il calcolo di exp(tA) ẋ00 .
cos ωt1+ ω1
1
sin ωt
cos ωt ω
−ω sin ωt cos ωt
Altra proprietà non banale è che exp(A) “rispetta” la similitudine di matrici: se A ∼ B
(cioè B = P −1 AP per qualche P ∈ GL m (R)) allora anche eA ∼ e B mediante le stesse
matrici. Ricordiamo che vale il teorema classico
11 (Jordan). Sia A ∈ Mm (C). Allora esistono matrici D, N , P, con D = diag Spec(A),
N matrice ν–nilpotente e P ∈ GLm (C) tali che (D + N ) = P −1 AP e DN = N D. In altre
parole il diagramma
TEOREMA
A
Cm −−−→
x
P
Cm
x
P
(16)
Cm −−−→ Cm
D+N
è commutativo.
OSSERVAZIONE. E’ facile vedere che D + N = P −1 AP ⇐⇒ A = P(D + N )P −1 , e allora
exp(tA) = exp(t P(D + N )P −1 ) = P exp(t(D + N ))P −1 (questo perché. . . ). Valendo la
commutazione, exp(tA) = Pe D e N P −1 : osserviamo ora che
• P è la stessa matrice che jordanizza A;
• e D = ediag Spec A = diag eSpec(A) , nel senso che se D = diag{λ1 , . . . , λm } (autovalori di
A) allora e t D = diag{eλ1 t , . . . eλm t } (discende dalla definizione).
• e t N è la somma esponenziale troncata all’indice ν–esimo. Si tratta quindi di un
polinomio in C≤ν [t];
• Osserviamo infine che da quanto detto discende che det exp(A)
= etr A ∈ C, e che
P
dunque grazie alle proprietà di similitudine det exp(A) = e λ∈Spec(A) λ .
41
FISMAT 2008/2009
OSSERVAZIONE. In generale lo spettro di Asarà complesso. Dovremo perciò considerare
e t D = diag e t Spec(A) = diag e t Re Spec(A) e i t Im Spec(A)
intendendo Re Spec(A) = {Reλ1 , . . . , Reλm } e Im Spec(A) = {Imλ1 , . . . , Imλm }. Ora,
diag e t Re Spec(A) è una matrice reale, mentre diag e i t Im Spec(A) è una matrice di rotazione nei
complessi (ha modulo 1, provare!).
Dato un sistema lineare in Rm , vorremmo ora stimare |x(t; x 0)| per capire “quanto si
allontana” la soluzione
dal dato iniziale. La soluzione essendo e tA x 0 , tutto dipenderà dal
valore di e tA∞ :
x 0 tA
tA
tA
= e |x |
|x(t; x 0)| = |e x 0 | = e
0
∞
|x 0 | e tA = Pe t(D+N ) P −1 ≤ kPk P −1 e t N e t Re Spec(A) e t Im Spec(A) ∞
∞
∞
∞
∞
alcune minorazioni di dubbia validità
Ciò porge una versione spettrale del teorema di Lyapunov sulla stabilità di un equilibrio. Prima di enunciarlo notiamo che
5. Sia ẋ = Ax una ED lineare con A ∈ Mm (R). Supponiamo che Re Spec(A) <
0 (cioè tutti gli autovalori di A abbiano parte reale negativa). Allora x ∗ = 0 è un
equilibrio asintoticamente stabile.
PROPOSIZIONE
Dimostrazione. E’ in realtà un corollario della disuguaglianza ottenuta precedentemente,
dato che (indicando −α := max Re Spec(A))
t−→∞
x(t; x 0) ≤ e−tα (1 + t ν )|x 0 | −−−→ 0
Il teorema spettrale di Lyapunov si basa su un procedimento detto linearizzazione
di un sistema differenziale: sia X : Rm −→ Rm un campo almeno C 1 che definisce una
ED del tipo ẋ = X (x). Sia poi x ∗ un equilibrio di tale ED: se sviluppiamo X in serie
′
∗
∗
∗
di Taylor attorno a tale equilibrio
otteniamo che X (x) ∼ x ∗ X (x )(x − x ) + o(|x − x |),
ove ovviamente X ′ (x ∗ ) =
dXi
dxj
è lo jacobiano di X calcolato in x ∗ . Il problema
i, j=1,...,n
iniziale è stato allora linearizzato, ridotto allo studio di un ED del tipo ẋ = Ax (ottenibile
con il cambio di variabili y := x − x ∗ , sarebbe interessante esplicitare l’azione di un
qualunque C k –diffeomorfismo sulla forma e le soluzioni di un ED). Enunciamo allora
12 (L-stabilità spettrale). Sia ẋ = X (x) un sistema differenziale con X : Rm −→
R campo almeno C 1 . Allora se x ∗ è un equilibrio, detto X ′ (x ∗ ) lo jacobiano di X
calcolato in x ∗ , si ha
TEOREMA
m
• Se Re Spec X ′ (x ∗ ) < 0 x ∗ è stabile;
• se esiste almeno un autovalore positivo, x ∗ è instabile;
42
FISMAT 2008/2009
• se lo spettro è ≤ 0, non si può dire nulla.
Dimostrazione. Omessa
OSSERVAZIONE. In presenza di un problema appena più complesso, cioè di una ED affine
del primo ordine del tipo ẋ = Ax + f (t), A ∈ Mm (R), f ∈ C 0 (R; R), la teoria delle
equazioni differenziali porge l’integrale generale
Z t
e(t−s)A f (s)ds
x(t; x 0) = e tA x 0 +
(17)
0
(metodo della variazione delle costanti arbitrarie).
Tale teorema trova immediata applicazione allo studio di sistemi dinamici linearizzati, dato che sviluppando un generico X : Rm −→ Rm in serie di Taylor attorno a un suo
equilibrio si ha X (x) ∼ x ∗ X ′ (x ∗ )(x − x ∗ ) + r(x), ove r(x) ∈ O (|x − x ∗ |2 )13 . Il sistema
linearizzato ammette allora soluzione del tipo
Z t
e(t−s)A r(x(s; x 0 ))ds
x(t; x 0) := e tA x 0 +
0
rappresentazione implicita, perché la soluzione x(#; x 0 ) compare entro la propria definizione.
Una verifica diretta assicura che questa è soluzione, e la regolarità di X assicura che essa
è l’unica almeno in u determinato intorno.
Valutiamo ora la distanza tra un problema non lineare e il suo corrispondente linearizzato
(
ẏ = X ′ (x ∗ ) y
y(0) = x 0 − x ∗
fissato un tempo T > 0 valutiamo la quantità sup t∈[0,T ] |x(t; x 0) − y(t; y0 )|.
Z
t
(t−s)A
e
r(x(s; x 0 ))ds
sup |x(t; x 0) − y(t; y0 )| = sup t∈[0,T ] 0
t∈[0,T ]
Z t
|e(t−s)A r(x(s; x 0 ))ds| ≤ sup t sup |e(t−s)A r(x(s; x 0 ))|
t∈[0,T ] s∈[0,t]
0
≤ sup t e(t−#)A r(x(#; x 0 )) ≤Λ sup t sup emax Re Spec(A)(t−s) (1 − |t − s|ν )ε2
≤ sup
t∈[0,T ]
t∈[0,T ]
t∈[0,T ]
s∈[0,t]
≤ Λ sup t sup emax Re Spec(A)(t−s) =Λ sup t(1 + t ν )ε2 = ΛT (1 + T ν )ε2
t∈[0,T ]
s∈[0,t]
t∈[0,T ]
p
Scegliendo opportunamente T ≃ 1/ n tale sup è allora dell’ordine di ε3/2 ≪ ε.
Tale condizione, lo ricordiamo perché sarà utile in seguito, equivale a chiedere che se |x − x ∗ | ≤ ε,
|r(x) − r(x ∗ )| = |r(x)| ≤ Kε2
13
43
FISMAT 2008/2009
A chiosa del discorso, linearizziamo
dinamico noto, il pendolo pesante
unv sistema
g
θ̇
g
θ̈ = − ℓ sin θ , o al primo ordine v̇ = − ℓ sin θ . Fissiamo x ∗ = 00 : allora
X ′ (x ∗ ) =
∂θ X 1 ∂ v X 1
∂θ X 2 ∂ v X 2
0
0
0
g
−ℓ
=
1
0
g
il sistema linearizzato è allora θ̈ + ℓ θ = 0.
OSSERVAZIONE. L’esame spettrale è insufficiente a confermare la stabilità di (0, 0)
OSSERVAZIONE. Un metodo euristico di “linearizzazione” consiste nell’affermare che per
piccoli angoli sin θ ∼ θ . Con questa approssimazione il moto oscillatorio è tautocrono,
fatto che si rispecchia nella forma dell’integrale generale.
Cinematica dei sistemi rigidi
7. Sia (O, ei ) un riferimento in E3 (R). Consideriamo il sistema composto dagli n punti
materiali OPi di masse mi . Il baricentri degli n punti è il punto geometrico di raggio vettore
DEFINIZIONE
OG := Pn
1
n
X
i=1 mi i=1
mi OPi
OSSERVAZIONE. La definizione data non dipende dal riferimento (, ei ) scelto: è una proprietà
generale dell’operazione di somma baricentrica.
OSSERVAZIONE. Da una simile proprietà discende che
n
X
mi GPi =
i=1
n
X
i=1
e in secondo luogo che 0 = P(r) =
mi (OPi − OG) = mOG − mOG = 0
Pn
˙
i=1 mi GPi .
OSSERVAZIONE. La quantità di moto del sistema è uguale a quella del baricentro considerato
come un punto materiale in cui è concentrata l’intera massa del sistema stesso:
˙ =
mOG
n
X
i=1
mi
dOPi
dt
⇐⇒ mvG =
n
X
m i vi = P
i=1
Il baricentro è insomma a tutti gli effetti un punto materiale solidale al sistema: possiamo
perciò introdurre un sistema di riferimento con origine in G e asso paralleli a quelli fissi, e
ottenere che
• ω(τ) = 0 (perché il sistema solidale non ruota rispetto a quello fisso)
• v (τ) = vG
44
FISMAT 2008/2009
(r)
• vi = vG + vi
Allora, se T è l’energia cinetica del sistema, si ha
n
n
X
X
(r)
2T =
mi vi2 =
mi (vG + vi )2
i=1
i=1
=
n
X
(r)2
m i vi
+
i=1
r
n
X
mi vG2 + 2
n
X
i=1
(r)
m i vi
i=1
· vG
=2T + 2T G
Pn
ove T G := 12 i=1 mi vG (energia cinetica del baricentro, considerato come punto materiale).
Questa relazione prende il nome di Teorema di König:
Tt ot = T r + T G
(18)
Altra quantità di fondamentale importanza è il momento angolare totale del sistema meccanico:
scelto un polo A per calcolare i momenti si ha
n
X
MA =
APi × mi vi
i=1
se scegliamo come polo il baricentro del sistema abbiamo
n
n
X
X
(r)
MG =
GPi × mi vi =
GPi × mi (vG + vi )
i=1
i=1
=
n
X
i=1
(r)
GPi × mi vi
(r)
=MG
+
X
n
+
n
X
i=1
GPi × mi vG
mi GPi
i=1
(r)
× vG = M G
e in particolare avendosi APi = AG + GPi si ricava
X
X
n
n
X
(r)
(AG + GPi ) × mi vi = AG ×
m i vi +
GPi × mi vi = AG × P + MG
MA =
i=1
i=1
(teorema di König per i momenti angolari).
OSSERVAZIONE. Abbiamo notato che possiamo considerare il baricentro OG del sistema discreto
in esame come facente parte a tutti gli effetti del sistema stesso, e anzi spesso fare ciò semplifica
le equazioni che usiamo. Il baricentro è in ogni senso un punto materiale perfetto, che non
necessita di approssimazioni per essere geometrizzato.
E’ anche facile notare che se S è un corpo rigido, il suo baricentro G è solidale al corpo:
fissato j ∈ {1, . . . , n} si ha
mvG =
n
X
i=1
m i vi =
n
X
i=1
mi (v j + ω × P j Pi ) = mv j + ω ×
= mv j + ω ×
45
n
X
i=1
n
X
mi P j Pi =
i=1
mi (GPi − GP j ) = m(v j + ω × P j G)
(19)
FISMAT 2008/2009
Allora se a S = {OP1 , . . . , OPn } si aggiunge il vettore OG si ottiene un altro sistema Sfdi n + 1
punti, che in più possiede un punto fisso. Nel sistema solidale allora vG = 0 e il moto del corpo è
una pura rotazione:
(r)
vi = ω × GPi
Utilizziamo questa relazione per riscrivere il teorema di König per i momenti angolari:
MA =AG × mvG +
=AG × mvG +
=AG × mvG +
n
X
(r)
mi G Pi + vi
i=1
n
X
i=1
n
X
i=1
mi (G Pi × (ω × G Pi )
mi ((G Pi · G Pi )ω − (G Pi · ω)G Pi )
n
X
2
mi (|G Pi | 1 − G Pi ⊗ G Pi ) ω
=AG × mvG +
i=1
=: AG × mvG + IG ω
Pn
La quantità IG := i=1 mi (|GPi |2 1 − GPi ⊗ GPi ) è detto tensore d’inerzia relativo al punto G. In
particolare nel sistema solidale vale
MG = IG ω
Esiste un analogo per l’espressione dell’energia cinetica:
T=
n
1X
1
(r)2
mvG2 + T r = mvG2 +
mi vi
2
2
2 i=1
1
n
1
1X
= mvG2 +
mi ((ω × G Pi ) · (ω × G Pi ))
2
2 i=1
n
1X
1
mi ω · (G Pi × (ω × G Pi ))
= mvG2 +
2
2 i=1
=
1
1
mvG2 + ω · IG ω
2
2
Allora nel sistema solidale con origine nel baricentro e assi paralleli a quelli fissi si ha
T=
1
2
ω · IG ω
Tensore d’Inerzia Studiamo più da vicino questo oggetto misterioso: dato un punto O e
un sistema di n punti materiali (OPi , mi ) definiamo il tensore d’inerzia rispetto a O come
IO :=
n
X
i=1
mi (|OPi |2 1 − (OPi ⊗ OPi ))
ove 1 è la matrice identica e OPi ⊗ OPi il tensore simmetrico generato da OPi .
46
FISMAT 2008/2009
Consideriamo ora la retta affine passante per O di direzione n̂: costruiamo lo scalare IOn̂ :=
n̂ · IO n̂, cioè
IOn̂ =
n
X
i=1
=
n
X
i=1
mi (|OPi |2 − n̂ · (OPi · n̂)OPi )
mi (|OPi ||2 − |OPi · n̂|2 ) =:
n
X
mi di2
i=1
ove si è posto di := dist (Pi , n̂) = |OPi ||2 − |OPi · n̂|2 .
Il tensore d’inerzia è allora uno strumento che incorpora tutte le informazioni sulla distribuzione delle masse nel sistema S nelle varie direzioni spaziali. Una volta che una di queste
direzioni è stata fissata con la scelta di un versore n̂, lo scalare n̂ · IO n̂ indica il momento d’inerzia
delle masse di S rispetto alla retta O + ⟨n̂⟩.
OSSERVAZIONE. IOn̂ non dipende dalla scelta del punto O sulla retta ⟨n̂⟩.
IO si atteggia ad oggetto algebrico molto ricco: troviamone alcune proprietà.
• E’ un tensore simmetrico di rango 2: è combinazione lineare di tensori simmetrici (=l’identità e i prodotti diadici OPi ⊗ OPi );
• da ciò (in virtù del teorema spettrale, e potendo assimilare T 2 (R) ≃ Bil(R)) discende che
IO è ortogonalmente diagonalizzabile: esiste cioè una base ortonormale di autovettori reali
{e1 , . . . , e3 } in cui
3
X
IO =
I k ek ⊗ ek
k=1
Spec IO = {I1 , I2 , I3 }, lo spettro di IO , è l’insieme dei suoi momenti principali d’inerzia.
• IO gode di due proprietà particolari che esplicitano la relazione tra tensori d’inerzia rispetto
a punti diversi (th. di Huygens–Steiner) e (mediante un corollario al suddetto) una regola
per ricavare il tensore d’inerzia di un oggetto geometrico complicato riducendolo al calcolo
di tensori d’inerzia più semplici.
13 (Huygens–Steiner). Sia S un sistema di npunti materiali di massa totale M e centro
di massa G. Sia poi O un punto qualunque; allora vale
TEOREMA
IO = IG + M dG2 (1 − eG ⊗ eG )
ove dG2 = |OG|2 e eG = OG/|OG|
Dimostrazione. Si può scrivere OPi = GPi + OG, e allora
|OPi |2 = |GPi |2 + |OG|2 + 2GPi · OG
OPi ⊗ OPi = GPi ⊗ GPi + OG ⊗ OG + GPi ⊗ OG + OG ⊗ GPi
47
FISMAT 2008/2009
(il prodotto diadico non è simmetrico!). Cosicché
n
X
IO =
mi (|OPi |2 1 − (OPi ⊗ OPi ))
i=1
n
X
(|G Pi |2 + |OG|2 + 2G Pi · OG)1 −
=
i=1
− (G Pi ⊗ G Pi + OG ⊗ OG + G Pi ⊗ OG + OG ⊗ G Pi )
n
n
X
X
=
mi [|G Pi |2 1 − G Pi ⊗ G Pi ] +
mi [dG2 1 − dG2 eG ⊗ eG ]
i=1
ricordando che
COROLLARIO.
i=1
Pn
= 0.
i=1 mi GPi
Sia n̂ un versore. Allora vale
IOn̂ = IG n̂ + M dist (G, n̂)2
Il momento d’inerzia è allora minimo se O ≡ G e IG prende il nome di tensore centrale d’inerzia.
I suoi autovalori (tutti positivi e reali, come detto) si dicono momenti centrali d’inerzia.
PROPOSIZIONE 6. Sia S =
M1 OG1 +M2 OG2
. Allora vale
M
S1 + S2 un corpo rigido di massa M ?M1 + M2 , e baricentro OG =
una legge di composizione dei tensori d’inerzia. Scopriamola man
mano.
E’ anzitutto ovvio notare che M OG = M1 OG1 + M2 OG2 , e data la natura di I la sommatoria
(1)
(2)
che lo definisce si può spezzare in due parti: IG = IG + IG . Allora per Huygens–Steiner vale
(
(1)
IG = IG1 + M1 [|G1 C|2 1 − G1 C ⊗ G1 C]
(2)
IG = IG2 + M2 [|G2 C|2 1 − G2 C ⊗ G2 C]
e dato che vale anche M G1 G = −M2 G2 G1 , M G2 G = M1 G2 G1 si ha che
(1)
m
IG = IG 1 +
1
(2)
m
IG = IG 2 +
2
M1 M22
M2
M2 M22
M2
d 2 1 − e12 ⊗ e12
d 2 1 − e12 ⊗ e12
ove d = |G1 G2 , e12 = G2 G1 /|G2 G1 |.
m
m
Allora IG = IG 1 + IG 2 + µd 2 1 − e12 ⊗ e12 , ove µ :=
1
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
bb
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
bb
b
b
b
b
b
b
b
b
b
= mi ai
b
b
b
b
b
bb
b
b
b
b
b
b
b
b
dt
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b b
b
b
b
b
b
dPi
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
(I )
=
ove si è indicato con Fi /Fi la i–esima forza esterna/interna agente
sul sistema, e con Pi la quantità di moto del punto i–esimo.
b
b
b
b
b
b
b
b
b
b
b
b
b
b
48
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
bb
b
b
b
b
b
b
bb
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
(E)
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
+ Fi
b
b
b
(I )
Fi
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
(E)
b
b
b
b
b
b
b
b
b
b
b
b
b
bb
b
bb
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b bb
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
bb
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b b
b
b b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
di N punti materiali S := (OPi , mi ) di massa totale M : è semplice
ricavare dalla seconda legge della dinamica che
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b b
b
b
b
b
bb
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
bb
b
b
b
b
b
b
b
b
Dinamica del Corpo Rigido Supponiamo di avere un sistema
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
è la massa ridotta di S .
b
bb
b
b
b
b
b
b
b
b
b
M1 M2
M −1+M2
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b b
b
b
b
b
b
b
b
b b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
2
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
FISMAT 2008/2009
Allora sommando su i si ottiene (R sono le risultanti delle forze)
E
I
R +R =
n
X
(E)
Fi
(I )
+ Fi
=
i=1
dP
dt
= M aG
Tale relazione costituisce la prima equazione cardinale della dinamica di sistemi particellari. La
risultante di forze esterne e interne agenti sul sistema uguaglia la massa totale per l’accelerazione
del baricentro considerato come punto materiale solidale al sistema. In sostanza G si muove come
un punto materiale in cui è concentrata tutta la massa del sistema soggetto alla risultante di tutte
le forze:
dP
= RE + RI
(20)
dt
La seconda equazione cardinale coinvolge i momenti angolari (le equazioni cardinali sono equazioni
di conservazioni di determinati momenti!). Scelto un polo A si ha
MA =
n
X
i=1
APi × mi vi
e allora
dMA
dt
=
=
n
X
dAP
i
i=1
n
X
i=1
=
n
X
i=1
(vi − vA) × mi vi +
n
X
i=1
dt
× m i vi +
APi × mi
n
X
i=1
d vi
dt
(E)
APi × (Fi
(I )
+ Fi )
−vA × mvG + NAE + NAI
si ottiene allora la seconda equazione cardinale
dMA
dt
= −vA × mvG + NAE + NAI
(21)
OSSERVAZIONE. All’ipotesi che S sia un sistema rigido queste due equazioni si semplificano
molto: il tal caso infatti le forze interne sono tutte e sole quelle che esplicano il vincolo di rigidità
(=mutua invarianza delle distanze), e allora la risultante delle forze interne e il momento delle
forze interne sono nulli. A queste ipotesi allora disponiamo delle due equazioni
(
Ṗ = R E
ṀA = −vA × mvG + NAE
(una ulteriore semplificazione si ottiene scegliendo G come polo dei momenti: cosa accade
in tal caso?).
Risultato non banale è la seguente
49
FISMAT 2008/2009
7. Le equazioni cardinali della dinamica di un sistema rigido sono logicamente
equivalenti al principio di D’Alembert: se S è rigido valgono le
PROPOSIZIONE
vi = vO + ω × OPi
ma allora il principio di d’Alembert diviene
n
X
i=1
(mi ai − FiE )δPi = 0
Ora, siccome δPi = vi d t ciò equivale a
0=
n
X
i=1
mi ai · (vO + ω × OPi ) − FiE · (vO + ω × OPi ) d t
=maG · vO + ω ·
n
X
i=1
=maG · vO + ω ·
OPi × mai − R E · vO − ω ·
d
dt
n
X
i=1
=(maG − R E ) · vO + (ṀO −
!
OPi × mi vi
n
X
i=1
−
n
X
i=1
OPi × FiE
n
X
dOP
i
i=1
dt
!
× mi vi − R E · vO − ω · NOE
(vi − vO ) × mi vi − NOE ) · ω
e data l’arbitrarietà di vO , ω deve aversi
(
maG = Ṗ = R E
ṀA = −vA × mvG + NAE
Infine, una descrizione geometrica precisa della configurazione di un corpo rigido parte da
una caratterizzazione della sua varietà delle configurazioni: tale varietà è
M = R2 × SO3 (R)
dato che la posizione del baricentro e la conoscenza del cambio di coordinate R = (ei · e∗j )i, j=1,...3
sono sufficienti a determinare univocamente la posizione di ogni punto di S .
OSSERVAZIONE. La dimensione di SO3 (R) come varietà differenziale è 3, dato
P che SO3 (R) = {R ∈
M3 (R) | RR t = 1, det R = 1} è definita da 6 equazioni indipendenti del tipo
k R ik Rk j
= δi j.
Applichiamo la teoria appena costruita allo studio di un corpo rigido con un punto O fisso.
Scegliamo su sistema di riferimento solidale con origine in O, nel quale il tensore d’inerzia sia
diagonale:
3
X
I k Jk ⊗ Jk
(O, J1 , J2 , J3 )
IO = IO =
k=1
Le relazioni di Poisson porgono J̇i = Ω × Ji , e vale bv MO = IO Ω. Essendo valida l’invarianza di Ω
nei due sistemi di riferimento (cioè Ω̇ |J = Ω̇ | E ) possiamo riscrivere la relazione
ṀO |J = ṀO | E +Ω × MO = NO
50
FISMAT 2008/2009
(equazione di Eulero per il momento angolare) come
IO Ω̇ + Ω × IO Ω = NO
(⋆)
relazione che permette, ridotta in forma normale ed integrata, di risalire all’espressione di Ω(t)
e di lì di risalire alle J (t) mediante le relazioni di Poisson.
Studiamo alcuni aspetti qualitativi dell’ultima equazione; troviamone gli equilibri ed indaghiamone la stabilità: se NO = 0, (⋆) diviene
IO Ω̇ + Ω × IO Ω = 0
che portata in forma normale è Ω̇ = −I−1
O (Ω × IO Ω) =: X (Ω).
• Cerchiamo Ω∗ tali che X (Ω∗ ) = 0: tali sono Ω∗ = 0 (=il corpo non ruota) e Ω∗ k IO Ω∗ (=Ω
è autovettore di IO ). Ciò è importane e non banale: le direzioni di Ω tali che Ṁ = 0 sono
quelle degli assi principali di inerzia.
• Cerchiamo integrali primi: ne troviamo due.
– MO è costante nel riferimento fisso, non così in quello mobile, dove però è costante
in modulo: |MO |2 è integrale primo.
– T = 21 Ω · IO Ω si conserva.
Allora se scriviamo queste due equazioni abbiamo
(
2
2
2
+ MO2
+ MO3
= cost.
MO1
2T = Ω · IO Ω = MO · I−1
O MO = cost.
la prima è visibilmente l’equazione cartesiana di una sfera S di raggio |MO |. La seconda
invece è l’insieme di livello di una quadrica in E3 (R), e in particolare si riscrive come
E=
M12
K I1
+
M22
K I2
+
M32
K I3
=1
p
cioè è un ellissoide di semiassi K I j , j = 1, 2, 3. Essendo tali superfici degli integrali primi
il vettore MO è vincolato a restare sulla loro intersezione. Si mostra facilmente che le due
superfici si intersecano sempre, e che vale
min λ j |MO |2 ≤ MO · IO MO ≤ max λ j |MO |2
ove i λ j sono i momenti principali d’inerzia. Potendoli supporre ordinati crescenti si ha
I1 ≤ I2 ≤ I3 e allora
≤ |MO |2 ≤ K I3
KI
| {z }
| {z1 }
s.minor e
s.ma g g ior e
∗
le soluzione con Ω k asse minimo/massimo sono stabili, mentre quella intermedia Ω∗2 =
(0, α, 0), intersezione E ∩ S: essa è una curva singolare (che funge a sorta di separatrice
del moto sull’ellissoide). Se riscriviamo (⋆) otteniamo
I −I
Ω̇ = 2 I 3 Ω2 Ω3 =: AΩ2 Ω3
1
1 I −I
Ω̇2 = 3 I 1 Ω1 Ω3 =: BΩ1 Ω3
2
I −I
Ω̇3 = 1 I 2 Ω1 Ω2 := CΩ1 Ω2
3
51
FISMAT 2008/2009
linearizzando questo sistema si ottiene la matrice
di cui uno positivo (AC > 0). Allora
Ω∗2
è instabile.
0 0 Aα
0 0 0
Cα 0 0
che ha due autovalori reali,
Descrizione alla Poinsot del moto di un CR Supponiamo di voler studiare il moto di
un corpo rigido con un punto O fisso: scegliamo un riferimento (O, Ji ) solidale con origine in tale
punto, e consideriamo la quadrica
Q := {X ∈ E3 (R) | X · IO X = 1}
Q è un ellissoide centrato in O, la cui equazione cartesiana è definita rispetto alla terna solidale.
Determinare il moto di Q equivale allora a conoscere l’evoluzione temporale della suddetta
terna. Un elegante teorema dovuto a Poinsot ci aiuta a determinare tale moto:
14 (Poinsot). Q rotola senza strisciare in un piano π ortogonale al vettore momento
angolare, a distanza fissa da O.
TEOREMA
Dimostrazione. Definiamo ρ := p1K Ω (ove K è il fissato valore dell’energia totale per il sistema).
E’ facile verificare che ρ ∈ Q, dato che ρ · IO ρ = 1. Inoltre la sua componente lungo MO è
costante:
p
K
ρ · eMO =
|MO |
mostriamo poi che π è tangente a Q: pensiamolo come insieme di livello f ← (1) per una certa
funzione f (X ) = X · IO X . Allora la normale a Q in P è
2IO Ω
∇ f (C) = p = αMO
K
Da ultimo, Qrotola su π senza strisciare: P = Q ∩ π
vP = vO + Ω × OP = Ω × ρ = 0
52
FISMAT 2008/2009
Meccanica Lagrangiana
L’opera di Lagrange segna l’apice della comprensione epistemica in Meccanica Classica.
A lui è dovuta la scoperta essenziale di un insieme di equazioni che descrivono un sistema
meccanico avendo l’importante proprietà di essere indipendenti in forma dal sistema di
coordinate scelto.
Nel seguito ci occuperemo di sistemi olonomi, bilaterali e lisci: studieremo cioè varietà differenziabili di classe almeno C 1 , senza bordo; tali varietà sono i vincoli cui sono
soggetti i punti nello spazio delle configurazioni. Allora S t ,→ R3n sarà una varietà di diÝ
mensione N ≤ 3n, parametrizzata da una certa immersione vincolare (t, q) 7→ O
P(t, q) =
Ý
(O P i (t, q))i=1,...,n . Il principio di d’Alembert diventa allora
n
X
i=1
¨ i (t) − Fi (OP, OP,
˙ t))d Pi = 0
(mi OP
(⋆)
per ogni vettore tangente d Pi ∈ TOP(t) S t . Scriviamo (⋆), spezzando la sommatoria e
pensando OP(t) composto con l’immersione vincolare:
n
X
n
X
˙ t)d Pi =
Fi (OP, OP,
˙
Fi (OP(q(t)), OP(q(t)),
t)
i=1
i=1
N
X
∂ OP
i
h=1
n
X
=
Fi (q, q̇, t)
i=1
N
X
∂ OP
i
h=1
∂ qh
∂ qh
q̇h =
q̇h =
N
n
N
X
X
X
∂ OPi
=
Fi (q, q̇, t)
qh(q, q̇, t)dqh
q̇h dqh =:
∂
q
h
i=1
h=1
h=1
OSSERVAZIONE. Si è usato il fatto che vi =
n
X
¨ i (q(t))d Pi =
mi OP
n
X
i=1
=
mi
i=1
n
X
mi
i=1
d vi
dt
PN
∂ OP
∂ OPi
q̇ + ∂ t i .
h=1 ∂ qh h
Ciò tornerà utile tra un po’.
d Pi =
N
n
N
X
X
X
d vi ∂ OPi
dqh =:
mi
th(q, q̇, q̈, t)dqh
q̇h =
∂ qh
d
t
∂
q
h
i=1
h=1
h=1
N
∂ OPi
d vi X
dt
h=1
Tutto si riconduce allora a caratterizzare in modo più preciso le
principio di d’Alembert si è ridotto a
t 7→ q(t) è din. possibile ⇐⇒
53
(22)
N
X
h=1
(th − qh)dqh = 0
(23)
th(#), dato che il
(22+23)
FISMAT 2008/2009
scriviamo allora in modo astuto le th:
th =
n
X
mi
d vi ∂ OPi
n
X
mi vi
∂ OPi
−
n
X
mi vi
d ∂ OPi
=:
d(♣)
∂ qh
d t ∂ qh
dt
i=1
Pn
PASSO CHIAVE: Abbiamo già introdotto la quantità T = 21 i=1 mi |vi |2 (energia cinetica).
Calcoliamo adesso le quantità
n
n
X
X
∂ vi
∂ OPi
∂T
mi vi
mi vi
=
= (per l’oss. precedente) =
= (♣)
∂ q̇h
∂ q̇h
∂ qh
i=1
i=1
n
n
n
N
X
X
X
d ∂ OPi X
∂ vi
∂ 2 OPi
∂T
∂ 2 OPi
=
mi vi
(♥) =
mi vi
=
q̇k +
=
mi vi
d t ∂ qh
∂ qh ∂ q k
∂ t∂ qh
∂ qh ∂ qh
i=1
i=1
i=1
k=1
i=1
d t ∂ qh
q̇h = (“per parti”) =
d
dt
i=1
+(♥)
(24)
Si ottiene allora la scrittura compatta
th =
d ∂T
d t ∂ q̇h
−
∂T
(L)
∂ qh
e il principio di d’Alembert diventa
N
X
ove qh :=
Pn
i=1
h=1
Fi (q, q̇, t)
(th − qh)dqh = 0 ⇐⇒
∂ OPi
q̇
∂ qh h
d ∂T
d t ∂ q̇h
−
∂T
∂ qh
= qh
sono le componenti lagrangiane generalizzate della forza.
OSSERVAZIONE. Con tecniche elementari si può mostrare che le equazioni di Lagrange
possono essere portate in forma normale: in altre parole esse costituiscono le equazioni
del moto di un corpo soggetto a vincoli lisci olonomi bilateri.
Dimostrazione. Basta riscrivere
N
n
N
X
X
1X
∂ OPi
∂ OPi
∂ OPi
∂ OPi
·
T (q, q̇, t) =
mi
q̇h +
q̇h +
2 i=1
∂
q
∂
t
∂
q
∂
t
h
h
h=1
h=1
!
!
N
n
n
N
n
X
X
∂ OPi 2
1 X X ∂ OPi ∂ OPi
1X
∂ OPi ∂ OPi
mi =
q̇h +
mi
q̇hq̇k +
mi
2 h,k=1 i=1
∂ qh ∂ q k
∂
q
∂
t
2
∂
t
h
i=1
i=1
h=1
=:T2 (q, q̇, t) + T1 (q, q̇, t) + T0 (q, q̇, t)
ove T2 è una forma quadratica nelle q̇, non degenere, definita positiva, T1 è lineare nelle
q̇ e T0 dipende solo da (t, q). Allora
T (q, q̇, t) =
N
1 X
2 h,k=1
Ahk q̇hq̇k +
N
X
Bh(q, q̇, t)q̇ + D(q, q̇, t)
h=1
1
= ⟨Aq̇, q̇⟩ + Bq̇ + d
2
54
FISMAT 2008/2009
E dunque ddt ∂∂ Tq̇ = Aq̈ + # = qh(q, q̇, t), q̈ = A−1 (qh − #) . Questa scrittura porge la forma
normale per esplicitare le equazioni del moto.
L’importanza di questi risultati è concettuale, ma anche pratica: vediamo con un
esempio quanto più semplice è arrivare a risolvere un moto a meno di quadrature,
utilizzando le equazioni di Lagrange.
Esempio. Risolviamo uno stesso esercizio in due modi: una sbarra di lunghezza AB = ℓ
è soggetta alla forza peso mG e ad una forza costante F applicata in B e ortogonale ad
AB. La varietà delle configurazioni è tridimensionale: prendiamo come coordinate la
posizione del baricentro (x G , yG ) e l’angolo θ formato da AB con l’asse x.
Utilizziamo prima le equazioni cardinali:
(
Ṗ = ddt mvG = R
ṀG = NG
dalla prima equazione si ricava mẍ x̂ + m ÿ ŷ = −F sin θ x̂ + F cos θ ŷ − mgẑ + φz ẑ.
Proiettando sugli assi x, y si ha allora
(
mẍ = −F sin θ
m ÿ = F cos θ
Ora, per trarre informazioni dalla seconda equazione cardinale, poniamoci in un sistema
di riferimento solidale al baricentro G e calcoliamo la matrice d’inerzia:
0
IG = mℓ2 /12
mℓ2 /12
sapendo che ω = θ̇ ẑ (il moto è piano) si ha allora
MG = I G ω =
mℓ2
12
ẑ
Si ha anche NG = GB × F + Nφ = F2ℓ ẑ + Ax̂ + B ŷ, ove Nφ è il momento delle reazioni
vincolari (non ci importa calcolarlo, non da contributo sull’asse ẑ: se Ṁ = N, deve essere
A = B = 0). Si ottiene allora
mẍ = −F sin θ
m ÿ = F cos θ
mℓ2
θ̇ = 2ℓ F
12
Costruiamo ora le equazioni di Lagrange: tutto si basa sul poter scrivere la funzione
energia cinetica:
2
1
1
1
1
ℓ
T = m|vG |2 + TG = m|vG |2 + IG ω · ω = m ẋ 2 + ẏ 2 +
θ̇ 2
2
2
2
2
12
55
FISMAT 2008/2009
Altresì un calcolo mostra che
q =d L F = F · d P = (−F sin θ x̂ + F cos θ ŷ) · (dG + dθ ẑ × GB) =
=(−F sin θ x̂ + F cos θ ŷ) · (d x x̂ + d y ŷ + dθ ẑ × (ℓ/2)(cos θ x̂ + sin θ ŷ)) =
= − F sin θ d x + F cos θ d y + (F ℓ/2)dθ
Allora è di nuovo un calcolo diretto a porgere th =
d ∂T
− ∂∂ qT
d t ∂ q̇h
h
mẍ = −F sin θ
⇐⇒ m ÿ = F cos θ
mℓ2
θ̇ = 2ℓ F
12
Facciamo alcune osservazioni:
• La difficoltà di questo approccio è puramente computazionale (perdere un segno,
così come un punto, è fatale);
• Un enorme vantaggio è però nascosto nell’impostazione algoritmica e del tutto
generale: trovare l’energia cinetica, scrivere le equazioni di Lagrange, studiare
qualitativamente i moti, se possibile risolverli. Sono sparite del tutto chiacchiere
di tipo fisico!
• Altro vantaggio (forse quello di maggior peso) è che non si è fatta alcun tipo di
assunzione riguardo alla natura o alle caratteristiche geometriche del vincolo (a
parte l’ipotesi generale di idealità olonoma). La “struttura” della varietà delle configurazioni nello spazio degli atti di moto è in qualche modo stata resa intrinseca,
“nascosta” nell’espressione di T .
Risolviamo il problema di Cauchy alle condizioni iniziali (x(0), y(0)) = (ẋ(0), ẏ(0)) =
(0, 0),
θ (0)
=
θ̇ (0)
=
0.
L’ultima equazione, autonoma in θ , si integra direttamente:
θ̈ =
6F
mℓ
⇐⇒ θ (t) =
3F
mℓ
t2
possiamo allora tracciare una mappa dell’evoluzione del baricentro, nel senso che segue.
Nè x(t) nè y(t) hanno una espressione
analitica semplice (cioè in termini di combinazioni di funzioni elementari): possiamo
però scrivere
0.75
0.5
0.25
-0.6
-0.4
-0.2
0.2
-0.25
0.4
0.6
ẋ(t) = −
-0.5
-0.75
56
ẏ(t) = −
F
m
F
m
Z
t
sin(αλ2 )dλ =: F S(t)
(25)
cos(αλ2 )dλ =: F C(t)
(26)
0
Z t
0
FISMAT 2008/2009
meglio noti come integrali di Fresnel. Si dimostra con qualche nozione di Analisi che questi due integrali esistono finiti, che
p le
due funzioni integrali F S(t), F C(t) sono limitate e che F S(+∞) = F C(+∞) = 21 π2 .
Allora abbiamo raccolto una importante informazione qualitativa: il modulo di vG =
(ẋ G (t), ẏG (t)) si mantiene limitato e tende a un valore finito, pur se la sbarra AB ruota
sempre più veloce (il moto θ (t) è uniformemente accelerato).
OSSERVAZIONE. Le due funzioni F S(t), F C(t) sono ben note e studiate in molto campi
delle Scienze applicate: la curva parametrizzata come γ: [0, +∞[−→ R2 , γ(t) = (F C(t), F S(t))
è detta spirale di Cornu, o clotoide14 .
Lagrangiane Operiamo una semplificazione: supponiamo che le qh agenti sul sistema siano tutte posizionali e conservative. In tal caso il sistema ammette un potenziale
Ý
U tale che qh(q) = − ∂∂ U
, ove U = U ◦ O
P(q). Possiamo dunque definire una funzione
q
h
L(q, q̇, t) = T (q, q̇, t) − U (q)
e le equazioni di Lagrange, per semplice linearità della derivazione, diventano
d ∂L
d t ∂ q̇h
−
∂L
∂ qh
=0
(♠)
Questa particolarizzazione è utile, per vari motivi, e getta luce su una realtà che emergerà man mano: vi sono profonde connessioni tra le proprietà algebrico–geometriche
delle equazioni di Lagrange e le caratteristiche dei sistemi dinamici studiati. In molti casi
particolari, ma che si presentano frequentemente, la sola impostazione delle equazioni
(♠) porge degli integrali primi:
• Supponiamo che ∂∂qL = 0 per qualche h ∈ {1, . . . , N }: allora la funzione ∂∂q̇L è un
h
h
integrale primo, perché è costante lungo i moti (ha derivata di Lie nulla perché
d ∂L
= 0). In generale, relazioni come queste si traducono nella constatazione
d t ∂ q̇h
che “esiste un gruppo [i.e., in questo caso, quello delle traslazioni temporali] sotto
la cui azione le equazioni di Lagrange sono invarianti”. Come appare chiaro da
questa sibillina sentenza, tale simmetria del sistema è tutt’altro che banale, ed
è lo specchio di una caratteristica della funzione L(#) che ha origini molto più
intrinseche della semplice modellizzazione fisica15 .
• Supponiamo ora che
∂L
∂t
= 0 (cioè L = L(q, q̇)). Allora la funzione
E(q, q̇) :=
N
X
∂L
h=1
∂ q̇h
q̇h − L
(IJ)
http://en.wikipedia.org/wiki/Fresnel_integral: vi si parla diffusamente delle proprietà
analitiche della curva e degli impieghi che questa forma trova in vari campi applicativi
15
http://en.wikipedia.org/wiki/Noether_theorem è eufemisticamente più accessibile nella
versione italiana.
14
57
FISMAT 2008/2009
è un integrale primo del sistema (ed è chiamato integrale di Jacobi). La prova
segue da un calcolo diretto:
N
N
N
N
N X
X
X
X
d ∂L
dE X
∂L
∂L
∂L
d ∂L
∂L
=
q̇h+
q̈h−
q̈h−
q̇h =
−
q̇h = 0
dt
d
t
∂
q̇
∂
q̇
∂
q̇
∂
q
d
t
∂
q̇
∂
q
h
h
h
h
h
h
h=1
h=1
h=1
h=1
h=1
OSSERVAZIONE. Nel caso particolare meccanico l’integrale di Jacobi è l’energia totale del sistema, e il fatto che esso sia un integrale primo discende dal teorema di
conservazione dell’energia.
Problemi Variazionali Supponiamo che L : Rn × Rn × R −→ R, (q, q̇, t) 7→ L(q, q̇, t)
sia, in tutta generalità, una certa lagrangiana. Fissati due punti q0 , q1 ∈ Rn vorremmo
trovare, se possibile, la curva t 7→ γ(t) più corta che all’istante t 0 passa per q0 e all’istante
t 1 per q1 . Consideriamo allora la classe delle curve di estremi q0 , q1 in C 2 (I) (I = [t 0 , t 1 ],
basterebbe in realtà considerare le C 2 (I) a tratti). L’insieme
q q
ΓI 0 1 := {γ ∈ C 2 (I) | γ(t 0 ) = q0 , γ(1 ) = q1 }
si atteggia naturalmente a spazio affine, di spazio vettoriale sottostante quello dei circuiti
q
q q
q
di estremo q0 , ΓI 0 : ogni γ ∈ ΓI 0 1 si scrive come γ̄(t) + h(t), con h ∈ ΓI 0 .
Il problema si ridurrà allora a studiare i punti estremanti di un certo funzionale
Z
q q
J : ΓI 0 1 −→ R
L(γ, γ̇, t)d t
J[γ] :=
I
OSSERVAZIONE. Per poter parlare di estremanti serve
una nozione di differenziabilità, quindi una topologia
generata da qualche norma: C 2 (I) però è uno spazio
vettoriale di dimensione infinita, e non tutte le norme
sono equivalenti: scegliamo di ricorrere alla più debole
nozione di derivata direzionale.
dJ[γ].h :=
d
dλ
J(γ + λh)
q q1
Abbiamo allora una caratterizzazione dei punti stazionari: γ ∈ ΓI 0
q
dJ(γ).h = 0 per ogni h ∈ ΓI 0 .
è stazionari per J se
TEOREMA 15 (Variazionale di Hamilton). γ è una curva stazionaria per il funzionale definito in () se e solo se γ risolve le equazioni di Lagrange per la lagrangiana che compare
nello stesso funzionale. Si deve cioè avere
dJ[γ] ≡ 0
⇐⇒
d ∂L
d t ∂ γ̇
−
∂L
∂γ
=0
(γ, γ̇ saranno in seguito chiamate q, q̇).
58
FISMAT 2008/2009
Dimostrazione. E’ un conto diretto (utilizziamo la convenzione di Einstein).
Z
t1
d
d
dJ[γ].h =
=
J(γ + λh) |λ=0 =
L(γ + λh, γ̇ + λḣ, t)d t
dλ
dλ
t0
λ=0
Z t1 ∂ L(q, q̇, t)
∂ L(q, q̇, t)
=
ḣi (t) d t = per parti
hi (t) +
∂ qi
∂ q̇i
t0
Z t1
t1 Z t1
d ∂L
∂L
∂L
−
hi (t)d t +
hi (t)
hi (t)d t =
=
∂ qi
∂ q̇i
d t ∂ q̇i
t0
t0
t0
Z t1 d ∂L
∂L
=−
−
hi (t)d t
d t ∂ q̇i ∂ qi
t
0
e appare chiaro che ⇐ segue.
i
∂L
−
hi (t)d t = 0 per ogni h, e
∂qi
t0
però esista qualche indice je qualche tempo t̄ tali che ddt ∂∂ q̇L − ∂∂ qL ( t̄) 6= 0. Per la
Viceversa procediamo per assurdo. Sia
R t1 h d
∂L
d t ∂ q̇i
j
j
continuità delle funzioni considerate possiamo applicare
la permanenza
del segno, e al
d
∂
L
∂
L
in cui
− ∂ q (t) ha lo stesso segno di
lora esiste tutto un intorno U con t̄ ∈ U
d t ∂ q̇ j
j
d ∂L
− ∂∂ qL ( t̄). Ma allora si può definire una h(t) non nulla in tale intorno (contind t ∂ q̇ j
j
R
ua e differenziabile a piacere), e l’integrale U ddt ∂∂ q̇L − ∂∂ qL hi (t)d t non sarebbe nullo,
j
j
assurdo.
Problemi di Geodetica Occupiamoci ora di un problema di geodetica: disponiamo
di una certa varietà 2–dimensionale S ,→ R3 e vogliamo trovare i punti estremanti del
funzionale lunghezza di una curva giacente su S.
Z t1 dO
P(q(t)) Ý
ℓ[q(t)] :=
dt
dt
t0
!1/2
Z t1
Z
2
X
Ý
Ý
Ý
P(q)
∂O
P(q) ∂ O
∂O
P(q) p
2T (q, q̇)d t
q̇hq̇k
=
dt =
∂ qh
∂ qk
∂ qh
t
h,k=1
0
Le geodetiche (curve di lunghezza minore) sono allora i minimi di questo funzionale.
p
Questo problema certamente è un caso particolare del precedente, dove L = T (q, q̇):
allora come visto una curva t 7→ q(t) è geodetica se e solo se ddt ∂∂Lq̇ − ∂∂Lq = 0. Si ha come
visto che
L (q, q̇) =
59
2
Ý
Ý
∂O
P(q) ∂ O
P(q)
1 X
2 h,k=1
∂ qh
∂ qk
q̇hq̇k =
2
1 X
2 h,k=1
ahk q̇hq̇k =: ⟨q̇, Aq̇⟩
FISMAT 2008/2009
ove (ahk ) è una matrice definita positiva, ed essenzialmente costituisce una metrica su
S, indotta dal prodotto scalare canonico. Si ha in buona sostanza una applicazione
g : S −→ Bil (TS, R), definita da q 7→ ahk (q), che a q ∈ S fa corrispondere una bilineare
definita positiva che, localmente, funge da metrica sulla varietà.
1. Se t 7→ q(t) risolve un determinato problema meccanico con lagrangiana
p L = T,
allora la stessa q(t) risolve anche il problema geodetico sul vincolo, con L = T :
LEMMA
d ∂
p
T
d t ∂ q̇h
−
∂
p
T
∂ qh
1 ∂T
1
1 ∂T
=
− p
= p
p
d t 2 T ∂ q̇h 2 T ∂ qh 2 T
d
∂T
∂ q̇h
−
∂T
∂ qh
Invarianza sotto diffeomorfismi
Un altra sorprendente proprietà di stabilità (che è la stessa proprietà di invarianza in forma decantata all’inizio) delle
equazioni di Lagrange è la seguente: la
relazione (♠) è invariante sotto l’azione
del gruppo dei diffeomorfismi. Partiamo dall’inizio: lo studio di sistemi dinamici si traduce molto spesso nello studio di certe varietà nello spazio delle
configurazioni, per descrivere le quali
è necessario disporre di buoni atlanti a
parametrizzarle. Questa bontà si misura
proprio nella possibilità di intersecare
adeguatamente (=in modo diffeomorfo)
i codomini delle varie carte locali: molto
spesso tali carte non sono globali, ed è necessario unirne una intera famiglia per poter disporre di un’atlante della varietà M in studio. All’intersezione di due carte, diciamo (U, φU ), (V, φV ), chiediamo che le mappe φU , φV siano differenzialmente compatibili, che cioè la mappa composta φV−1 φU : φU← (U ∩ V ) −→ φV← (U ∩ V ) sia un diffeomorfismo della stessa regolarità delle φU , φV . Questo inevitabilmente si riflette sulle
lagrangiane: se i cambiPdi coordinate tra le curve sono q = q(q̃(t)) si avrà per la curva
N
∂q˙
t 7→ q(t) che v = q̇ = h=1 ∂ q̃ q̃.
Allora se L(q, q̇) è una certa lagrangiana, si avrà pure
∂
q
˙
˙ = L(q(q̃), q̃).
L(q̃, q̃)
∂ q̃
16. Un certo moto t 7→ q(t) risolve (♠) se, e solo se, un altro moto t 7→ e
q (t)
risolve (♠), ove q, e
q sono carte differenzialmente compatibili prese da un atlante della
varietà delle configurazioni.
˙ = L q(˜(q), ∂ q q̃˙
Dimostrazione. La dimostrazione è un conto diretto: indichiamo con L (q̃, q̃)
∂ q̃
TEOREMA
la lagrangiana nelle nuove coordinate. Osserviamo preliminarmente che
60
∂ q̇
∂ q̃˙
=
∂q
∂ q̃
(“è
FISMAT 2008/2009
come togliere i punti”) e procediamo:
d ∂ L ∂ q̇ j
d ∂ L ∂q
d ∂L
=
=
=
d t ∂ q̃˙k
d t ∂ q̇ j ∂ q̃˙k
d t ∂ q̇ j ∂ q̃
∂L
=
∂ q̃k
d ∂L
d t ∂ q̇ j
∂ q̃k
∂ L ∂ qh
∂ qh ∂ q̃k
∂ qj
+
+
∂ L d ∂ qj
∂ q̇ j d t ∂ q̃k
=
d ∂L
d t ∂ q̇ j
∂ L ∂ q̇ j
∂ qj
∂ q̃k
+
∂ L ∂ q̇ j
∂ q̇ j ∂ q̃k
(27)
∂ q̇ j ∂ q̃k
Allora segue immediatamente che
∂L
d ∂L
−
=
d t ∂ q̃˙
∂ q̃
nullo se e solo se
invertibile
d ∂L
d t ∂ q̇
−
∂L
∂q
d ∂L
−
d t ∂ q̇
∂L
∂q
∂q
∂ q̃
= 0, dato che il (differenziale del) cambio di coordinate è
Linearizzazione delle equazioni di Lagrange Supponiamo che esista q∗ tale che
∂U
∂ 2U
∗
(q
)
=
0,
e
(q∗ ) sia definita positiva (cioè supponiamo che q∗ sia un equilibrio
∂ qh
∂ qh ∂ q k
stabile). Vogliamo linearizzare le equazioni di Lagrange attorno a q∗ : senza perdita
di generalità potremo supporre q∗ = 0 (dato che, a meno di traslazioni, le equazioni
mantengono la stessa forma). Cominciamo col disporre di
(
Pn
T (q, q̇) = 12 h,k=1 ahk (q)q̇hq̇k def + nelle q
∂ 2 U (0)
∂ qh ∂ q k
def. + in 0
le equazioni di Lagrange diventano allora
d
dt
(ahk ) −
1 ∂ ai j
2 ∂ qh
q̇i q̇ j = −
∂U
⇐⇒ q̈ + a−1
lh
∂ qh
∂ ai j
∂U
1
q̇i q̇k − a−1
q̇i q̇ j = −a−1
lh
lh
∂ qi
2
∂ qh
∂ qh
∂ ahk
che portato al primo ordine raddoppia di dimensione e diventa
(
q̇l = vl
⇐⇒ q̇v̇ = X ( qv )
1 −1 ∂ ai j
−1 ∂ ahk
−1 ∂ U
v̇l = −alh ∂ q vi vk + 2 alh ∂ q vi v j − alh ∂ q
i
h
h
Allora X ′ 00 è
0
1
0
1
=
∂ 2 U (0)
1
∂ 2U
−1
−1 ∂ ahk
−1 ∂ ai j
0
−a
v
+
−
a
v
−a
(0)
−a−1
i
j
lh ∂ q
lh ∂ q
lh
lh ∂ q ∂ q
∂q ∂q
2
h
k
i
h
i
k
Infine, dunque, il sistema linearizzato attorno all’equilibrio stabile diventa
al m (0)q̈m =
∂ 2 U (0)
∂ ql ∂ qk
qk = 0
(28)
Possiamo a questo punto applicare certe trasformazioni all’equazione precedente, per
semplificarne la forma.
61
FISMAT 2008/2009
1. Rotazione R1 che diagonalizza la matrice cinetica ai j : q 7→ q1 = R1 q di modo che
(
Pn
1
2
U1 = 21
T1 =
Pi=1
n
2
ai q1i
u′ (q)q1i q1 j
i, j=1 i j
diag.
def. + nelle q
p
2. Omotetia S di rapporti 1/ ai di modo che
(
Pn
1
2
U2 = 21
T2 =
Pi=1
n
2
q2i
i, j=1
u′′i j (q)q2i q2 j
identità
def. + nelle q
3. Trasformazione ortogonale R2 che diagonalizza U2 (esiste di sicuro, perché?):
(
Pn
T3 = T2 = 1 = 12 i=1 q2i
Pn
U3 = 12 i=1 ω21 q2i
Il cultore dell’algebra lineare avrà riconosciuto in questo procedimenti la diagonalizzazione simultanea di due matrici simmetriche definite positive: esiste sempre una trasformazione lineare (nel nostro caso la composizione P = R2 SR1 ) che ortonormalizza una
matrice (la cinetica) e diagonalizza l’altra (∇2 U (0)). In tal modo le equazioni linearizzate diventano
q̈i + ω2i qi = 0
i = 1, . . . , n
(LL)
oppure vettorialmente q̈ + Ω2 q = 0, ove Ω2 = diag(ω1 , . . . , ωn ) ∈ Mn (R). Si dispone
allora di un insieme di equazioni molto particolare: si tratta di n oscillatori armonici
disaccoppiati, di frequenze ω2i , che sono esattamente gli autovalori di ∇2 U (0). Appare
chiaro infatti che in ognuna delle (LL) ω21 è frequenza caratteristica se e solo se det(Ω2 −
ω2i 1) = 0: tenuto conto che ω2 = P t ∇2 U (0)P, 1 = P t T P, si ha che ω2i è frequenza
caratteristica se e solo se risolve il problema agli autovalori relativo
det(∇2 U (0) − ω2i T (0)) = 0
Moti piani
Si dice moto piano un qualunque moto t 7→ x(t) tale che il
suo supporto geometrico giaccia su un certo piano π. Se si
sceglie su π una qualunque base ⟨u, v⟩ è possibile assegnare
ad ogni punto di tale piano delle coordinate, così come è
possibile parametrizzare il moto x(t) = x u (t)eu + x v (t)e v (in
generale eu , e v , versori dei vettori di base su π, dipenderanno
dal tempo).
62
FISMAT 2008/2009
Nello studio di moti piani una utile parametrizzazione è quella offerta dalle coordinate polari: nel piano cartesiano possiamo introdurre
(
e r = cos θ e1 + sin θ e2
eθ = − sin θ e1 + cos θ e2
notiamo tra l’altro che anche questo riferimento è ortonormale.
Noto che (basta fare il conto) ė r = θ̇ eθ e ėθ = −θ̇ e r , è poi facile ricavare le relazioni
OP = re r
˙ = ṙe r + r θ̇ eθ
OP
¨ = (r̈ − r θ̇ 2 )e r + (2ṙ θ̇ + r θ̈ )eθ
OP
il termine di accelerazione in particolare è fatto da due componenti ortogonali, una
tangenziale e una radiale.
OSSERVAZIONE. Vogliamo calcolare la velocità areolare del raggio vettore OP parametriz-
zato in polari: ricordano la formula per l’area del parallelogramma tra due vettori u, v,
A(u, v) = 21 |u × v|, abbiamo
Ȧ = lim
∆t−→0
= lim
∆t−→0
OSSERVAZIONE. Ȧ =
DEFINIZIONE
r ar
,
2
1
2∆t
1
2∆t
˙
|OP × OP∆t|
r 2 θ̇ |e r × eθ | =
d r 2 θ̇
(29)
dt 2
connessione affatto casuale.
¨ = 0.
8 (Moto centrale). Un moto si dice centrale se OP × OP
TEOREMA 17. Ogni moto centrale è piano, e la velocità areolare spazzata dal raggio vettore
r(t) è costante.
˙ è costante nel tempo: si ha infatti ṀO = OP×
˙ OP+OP×
˙
Dimostrazione. MO = OP×mOP
¨ = 0. Se MO 6= 0 il moto avviene allora nel piano π univocamente determinato dal suo
OP
˙ k OP
¨ e allora il moto è rettilineo centrale (precipitazione
ortogonale. Se MO = 0 OP k OP
nel polo dei momenti).
Allora in particolare MO è costante in modulo: tale modulo è |re r × (ṙ e r + r θ̇ eθ )| =
2
r θ̇ , proprio la velocità areolare.
Supponiamo ora di aver ricavato, mediante osservazioni o altro, l’equazione θ 7→
r(θ ) del supporto geometrico della curva di un dato moto centrale. Come dedurre le
63
FISMAT 2008/2009
varie grandezze cinematiche, nota la costante della velocità areolare c = r 2 θ̇ ? Facciamo
qualche conto:
ṙ =
dr
θ̇ =
dr c
2
= −c
d
1
dθ r
dθ r(θ )
2
d 1
c2
2
2
2 2
2
|v| = ṙ + r θ̇ = c
+
d t r(θ )
r(θ )2
2
2
2
2
d
1
1
c
d
c
1
|a| = ar = r̈ − r θ̇ 2 = −c 2
θ̇ − r 4 = − 2
+
dθ r(θ )
r
r
dθ 2 r(θ ) r(θ )
dθ
siamo giunti a scrivere le formule di Binet.
Coniche, una descrizione metrica Meglio di qualunque tentativo di sintesi l’estensore possa compiere, farà questo link: http://www.math.unipd.it/~andiler/
didafiles/2006/hw_extra.pdf. Noi siamo interessati a studiare certe proprietà geometriche di una conica in particolare, l’ellisse. Se E è centrato nell’origine, siano a, b i
2ed
suoi semiassi: se e è la sua eccentricità, è facile notare che 2a = r(0) + r8π) = 1−e
2, e
dunque a =
ed
.
1−e 2
Altrettanto in fretta si nota che, se f è la distanza
2e 2 d
di un fuoco dall’origine, 2 f = r(π) − r(0) = 1−e
2 , cioè
2
P
F2
Q
F1
e d
f = 1−e
La proprietà caratteristica dell’ellisse è
2 = ea.
poi quella per cui F2 P + F1 P = k per ogni P ∈ E . Notiamo questo proprietà nel punto H di intersezione tra
l’asse y positivo ed E : abbiamo 2( f 2 + b2 )1/2 = 2a, cioè
b2 = a2 − f 2 = a2 (1 − e2 ) = aed = ap. Mettiamo insieme
queste relazioni:
1
r
= 1+e pcos θ
b2 = ap
ed
a = 1−e
2
f = ea
Siamo pronti per enunciare le leggi di Keplero:
1. I moti dei pianeti sono ellissi in cui il Sole occupa uno dei fuochi;
2. La velocità areolare spazzata dal raggio vettore Sole–pianeta è costante;
3. La quantità a3 /T 2 (semiasse maggiore su periodo del moto) è una costante universale.
Osserviamo subito che (1) implica che il moto è piano, cioè che M si conserva in direzione, e (2) implica che il vettore momento angolare si conserva in modulo. Il moto
allora è centrale: l’accelerazione dunque è puramente radiale.
2
c2
1
d
1
ar = − 2
+
r
dθ 2 r(θ ) r(θ )
64
FISMAT 2008/2009
scrittura che utilizzando le relazioni trovate poco sopra diventa
1 + e cos θ
c2 1
e
c2
=−
− 2 − cos θ +
r
P
P
p r(θ )2
Ora, c = 2Ȧ =
2πa b
:
T
ar = −
4π2 a2 b2 a
T
2
2
1
b r(θ )
2
=−
4π2 a3
T
2
1
r(θ )
2
=λ
1
r(θ )2
Descrizione Newtoniana del moto La formulazione di Newton della gravitazione
descrive la dinamica del moto planetario assumendo le tre leggi di Keplero. Poniamoci
in un sistema di riferimento inerziale: t 7→ OP(t), t 7→ OS(t) siano moti di due punti
materiali P, S di modo che
(
¨ = γ mP m3S PS = F P
m P OP
|PS|
¨ = −γ mP m3S PS = FS
mS OS
|PS|
il sistema è visibilmente non lineare, né lipschitziano (è definito solo un R3 ×R3 \{(x, x) |
x ∈ R3 }). Troviamo presto alcuni integrali primi: l’isolamento del sistema impone infatti
˙ + mS OS
˙ = k, inoltre SP × F P = 0 ⇒ MO = m P OP × OP
˙ + mS OS × OS
˙ =h
che P = m P OP
(costanti). Anche l’energia totale è una costante,
1
m m
1
˙ 2 + mS |OS|
˙ 2 − γ P S = cost.
˙ OS, OS)
˙ = m P |OP|
E(OP, OP,
2
2
|PS|
m m
P S
(cioè U = −γ |PS|
è un potenziale).
Scegliamo ora un nuovo sistema di riferimento, non inerziale, con origine nel Sole e
assi paralleli rispetto a quelli dell’inerziale (cioè che puramente trasla rispetto al precedente). In tale sistema x = SP è il vettore congiungente Sole e pianeta: in tal modo
˙ − OS,
˙ ẍ = OP
¨ − OS.
¨ Allora, se F P = m P OP,
¨ vale
ẋ = bvOP
¨
m P ẍ = F P (x, ẋ) − m P OS
¨ = mS FS = −mS F P ,
cioè, ricordando che OS
mP
m P ẍ = 1 +
F P ⇐⇒ µ PS ẍ = F P (x, ẋ)
mS
Possiamo a questo punto sfruttare le relazioni di Binet per l’accelerazione, per giungere
a
2
1
d
1
m P mS
d2 1
m P + mS
c2
+
=
−γ
⇐⇒
=
γ
−µ PS 2
r
dθ 2 r(θ ) r(θ )
r(θ )2
dθ 2 r(θ )
c2
equazione caratteristica di un oscillatore armonico forzato, di forzante costante K =
m +m
γ Pc 2 S . L’integrale generale è allora
1
r(θ )
65
= Acos(θ − θ0 ) + K ⇐⇒ r(θ ) =
1
1+
A
K
cos(θ − θ0 )
FISMAT 2008/2009