CONVERTITORI PER
MOTORI ASINCRONI
SERIE DVETPlus
CONVERTITORI PER
MOTORI ASINCRONI
SERIE DVETPlus
Manuale d’installazione
1
Rev. 1.0 26/07/06
SOMMARIO
1.
INFORMAZIONI GENERALI SULLA SICUREZZA................................................................................... 1-1
1.1 AVVERTENZE ...................................................................................................................................... 1-2
2. DATI TECNICI............................................................................................................................................ 2-1
2.1 CARATTERISTICHE TECNICHE DELLA POTENZA .......................................................................... 2-1
2.2 CARATTERISTICHE TECNICHE DELLA REGOLAZIONE ................................................................. 2-3
2.3 DIMENSIONI DI INGOMBRO............................................................................................................... 2-4
2.3.1
Serie DVET S1............................................................................................................................. 2-4
2.3.2
Serie DVET S2............................................................................................................................. 2-5
3. AZIONAMENTI INVERTER 75KW 90KW 110KW 132KW TDE MACNO ................................................ 3-6
4. AMBIENTE CHIUSO, POTENZA DISSIPATA .......................................................................................... 4-1
5. INSTALLAZIONE....................................................................................................................................... 5-2
5.1 ISTRUZIONI PER L'INSTALLAZIONE DEL CONVERTITORE ........................................................... 5-2
5.2 VENTILAZIONE .................................................................................................................................... 5-3
5.3 ALLACCIAMENTO ALLA RETE ........................................................................................................... 5-4
5.4 COLLEGAMENTO DEL MOTORE ....................................................................................................... 5-4
5.5 COLLEGAMENTO A TERRA DEL CONVERTITORE DI FREQUENZA ............................................. 5-4
5.6 ACCORGIMENTI ANTIDISTURBO ...................................................................................................... 5-5
6. DIMENSIONAMENTO................................................................................................................................ 6-1
6.1 CAVI, FUSIBILI, IMPEDENZA DI LINEA E RESISTENZE DI FRENATURA....................................... 6-1
6.2 MOTORE .............................................................................................................................................. 6-2
7. PROPOSTE DI COLLEGAMENTO CON I PARAMETRI DI DEFAULT ................................................... 7-1
7.1 RIFERIMENTO DI VELOCITÀ DA POTENZIOMETRO ESTERNO .................................................... 7-1
7.2 RIFERIMENTO DI VELOCITÀ DA POTENZIOMETRO DIGITALE ..................................................... 7-2
8. MORSETTIERE.......................................................................................................................................... 8-1
8.1 DISPOSIZIONE FISICA........................................................................................................................ 8-1
8.2 MORSETTIERA DI POTENZA ............................................................................................................. 8-1
8.3 MORSETTIERA DI CONTROLLO (M1) ............................................................................................... 8-2
8.4 INGRESSO SENSORE DI VELOCITA` (M2) ....................................................................................... 8-4
8.4.1
Encoder........................................................................................................................................ 8-4
8.4.2
Resolver ....................................................................................................................................... 8-4
8.4.3
Pastiglia termica motore .............................................................................................................. 8-5
8.5 CONNETTORE DELLA LINEA SERIALE (CONNETTORE J1)........................................................... 8-6
8.6 SEGNALI ENCODER SIMULATO (CONNETTORE J2) .................................................................... 8-6
8.6.1
CONFIGURAZIONE DELL’USCITA DI SIMULAZIONE ENCODER (CONNETTORE J2) ......... 8-7
9. INGRESSI LOGICI ..................................................................................................................................... 9-1
9.1 POSSIBILI COLLEGAMENTI ............................................................................................................... 9-1
9.2 CARATTERISTICHE ELETTRICHE..................................................................................................... 9-1
10. USCITE LOGICHE ................................................................................................................................... 10-1
10.1 POSSIBILI COLLEGAMENTI ............................................................................................................. 10-1
10.2 CARATTERISTICHE ELETTRICHE................................................................................................... 10-1
Manuale d’uso
I
Serie – DVET PLUS
Rev. 1.0 26/07/06
1. INFORMAZIONI GENERALI SULLA SICUREZZA
Tutti i convertitori prodotti dalla TDE MACNO s.p.a. di Vicenza appartenenti alla serie DVET PLUS sono
conformi alla Direttiva Bassa Tensione CEE 73/23, modificata dalla Direttiva CEE 93/68 e alle relative
legislazioni nazionali di recepimento.
Nella loro progettazione e costruzione sono applicate articoli della norma armonizzata EN 60204-1.
Norme importanti per la sicurezza
Nella progettazione del sistema e nella installazione, messa in funzione, manutenzione e controllo dei
convertitori devono essere osservate le norme per la prevenzione infortuni e per la sicurezza valide per il caso
specifico di impiego.
•
In particolare , fra le altre ,vanno rispettate le seguenti norme :
∗ CEI 64.8
Impianti elettrici utilizzatori a tensione nominale non superiore a 1000V c.a. - 1500V c.c
∗ CEI EN 60204-1
Sicurezza del macchinario; Equipaggiamento elettrico delle macchine
Designazione dei componenti ed esempi di disegni, schemi, tabelle ed istruzioni
∗ CEI EN 60146-1-1
Manuale d’uso
1-1
Serie – DVET PLUS
Rev. 1.0 26/07/06
1.1 AVVERTENZE
•
Prima di installare e di utilizzare l’apparecchiatura leggere attentamente il manuale.
•
Si declina ogni responsabilità per qualsiasi uso improprio dell’apparecchiatura differente da
quelli prescritti nel manuale.
•
Nessuna modifica o operazione non prescritta dal manuale è consentita senza l’autorizzazione
esplicita del costruttore, e deve essere eseguita solo da personale qualificato. In caso di
mancata osservanza, il costruttore declina ogni responsabilità sulle possibili conseguenze, e
viene a decadere la garanzia.
•
La messa in servizio e l’installazione è consentita solo a personale qualificato, il quale è
responsabile del rispetto delle norme di sicurezza imposte dalle norme vigenti.
•
L’azionamento se sprovvisto del filtro opportuno e collegato a reti pubbliche di distribuzione a
bassa tensione di zone residenziali , può provocare interferenze a radio frequenze.
•
Nel caso specifico di impiego bisogna tenere conto delle norme di sicurezza valide per la
prevenzione degli infortuni. L'installazione , il cablaggio e l'apertura dell'apparecchiatura e del
convertitore devono avvenire in stato di assenza di tensione .
•
Apparecchiature e convertitori devono essere installati in una custodia a prova di contatto con
un grado di protezione IP secondo le norme.
•
Posizionare l’apparecchiatura in modo che sia facilitata la manutenzione, e che non ci sia
pericolo di interferenza con parti in movimento.
•
Assicurarsi che
convertitore.
•
In caso di incendio in prossimità
contenenti acqua.
•
Evitare in ogni caso la penetrazione di acqua o altri fluidi all’interno dell’apparecchiatura.
•
Qualsiasi operazione all’interno dell’apparecchiatura deve essere fatta in assenza di tensione.
Essendo presenti condensatori, attendere almeno 8 minuti prima di accedere per operazioni
all’interno.
Manuale d’uso
sia sempre garantita sufficiente
ventilazione per smaltire le perdite del
dell’apparecchiatura non utilizzare mezzi estinguenti
1-2
Serie – DVET PLUS
Rev. 1.0 26/07/06
2. DATI TECNICI
2.1 CARATTERISTICHE TECNICHE DELLA POTENZA
Serie S1
1,5
TAGLIA
3
4
5,5
7,5
11
15
18,5
22
30
37
45
55
75
90
110
132
Uscita lato motore
Motore applicabile
kW
1,84
3
4
5,5
7,5
11
15
18,5
22
30
37
45
55
75
90
110
132
A rms
A rms
4
6
7
10,5
10
15
12
18
17
25,5
24
36
32
48
37
55
48
72
60
90
70
105
90
135
107
160
150
225
175
263
220
330
250
375
A rms
A rms
V AC
Hz
4,5
5,4
8
9,6
11
13
13,5
16
19
23
27
32
36
43
42
50
54
65
67,5
81
79
95
101
121
118
142
167
201
195
234
248
298
280
336
104
140
168
206
247
105
28
105
34
150
48
220
56
300
72
300
81
Sovraccarico 150% × 30¨
Corrente nominale
Corrente massima × 30¨
Sovraccarico 120% × 30¨
Corrente nominale
Corrente massima × 30¨
Tensione di uscita
Frequenza di uscita
Modo di funzionamento
375 ÷ 410
0 ÷ 1000 Hz ( vedi nota alla pag. seguente )
a quattro quadranti (con chopper di frenatura)
Lato ingresso rete
Tensione efficace trifase
di alimentazione
Corrente alla potenza
nominale con caduta di
linea pari al 3%
Frequenza di rete
400 ÷ 440 +10% - 15%
V AC
A rms
3,4
6,5
8,5
11,4 15,2
22
28,6 36,6 42,6 58,1 70,9 86,2
50 ÷ 60 Hz ± 5%
Chopper di frenatura
Tensione di intervento
V DC
Corrente di picco
Corrente continuativa
A DC
A DC
750
12
1
12
1,8
12
2,4
12
3,4
30
5
30
6,8
30
9
55
11
55
14
85
13
85
25
1,5
3
4
5,5
7,5
11
18,5
22
30
37
45
55
75
90
110
132
1,84
3
4
5,5
7,5
11
18,5
22
30
37
45
55
75
90
110
132
Serie S2
TAGLIA
Motore applicabile
kW
Sovraccarico 200% × 3¨ e 155% × 30¨
Corrente nominale
Corrente massima × 3¨
Corrente limite × 30¨
A rms
A rms
A rms
3,75
7,5
5,8
6,75
13,5
10,5
9,5
19
14,7
11,5
23
18
16,5
33
25,5
21
42
32,5
35
70
54
46
92
71
57
114
88
67
134
104
86
172
133
100
200
155
140
280
217
165
330
256
210
420
325
238
476
369
Corrente nominale
Corrente massima × 30¨
Tensione di uscita
Frequenza di uscita
Modo di funzionamento
A rms
A rms
V AC
Hz
4
8
5,75
11,5
8
16
10
20
14
28
18
36
30
60
40
80
48
96
57
114
74
148
85
170
120
240
140
280
180
360
203
406
Tensione efficace trifase
di alimentazione
Corrente alla potenza
nominale con caduta di
linea pari al 3%
Frequenza di rete
V AC
Sovraccarico 200% × 30¨
375 ÷ 410
0 ÷ 1000 Hz ( vedi nota alla pag. seguente )
a quattro quadranti (con chopper di frenatura)
Lato ingresso rete
A rms
400 ÷ 440 V
3,3
6,3
8,2
11
14,6
21,2
35,2
+10% - 15%
41
55,8
68
83
100
135
169
197
232
85
25
105
28
150
34
150
48
220
56
300
72
300
81
50 ÷ 60 Hz ± 5%
Chopper di frenatura
Tensione di intervento
V DC
Corrente di picco
Corrente continuativa
A DC
A DC
Manuale d’uso
750
12
2
12
2,5
12
3
12
4
30
5
30
6
2-1
55
11
55
14
85
21
Serie – DVET PLUS
Rev. 1.0 26/07/06
Caratteristiche comuni alle due serie S1 ed S2
Caratteristiche della potenza
• Dispositivo statico di precarica automaticamente inserito all'arrivo della rete o comandabile esternamente
• Circuito di clamp di tensione (frenatura), opzionale con resistenza di frenatura esterna
• Ponte ad IGBT protetti alla desaturazione
Specifiche del controllo
Sistema di
modulazione
Frequenza di
modulazione
Segnale di comando
di velocità
PWM vettoriale
Risoluzione velocità
Errore di linearità del
riferimento di velocità
Rampe
3 ÷ 16 (default 5)*
kHz
sec.
Quattro ingressi analogici -10..0..+10 V. dc
Un riferimento interno programmabile
Un rif. interno variabile tramite pulsanti di aumenta e diminuisci
Con riferimento analogico a 14 bit = 1‰ velocità massima
Con riferimento analogico convertito in frequenza = 0,1‰ velocità massima
Con riferimento digitale da jog = 1‰ velocità massima
Con riferimento analogico a 14 bit ≥ 1% velocità massima
Con riferimento analogico convertito in frequenza ≥ 1% velocità massima
Con riferimento digitale da jog = 0
0.01÷199.99 impostazione separata sui quattro quadranti
con possibilità di arrotondamento
Condizioni ambientali
Temperatura di
funzionamento
Temperatura di
immagazzinamento
Umidità
Altitudine di lavoro
Vibrazioni massime
Tipo di protezione
°C
0 ÷ 45
°C
-10 ÷ +60
%
minore del
90% non condensante
Declassamento in potenza dell’1% ogni 100m sopra i 1000m
Altitudine massima di lavoro 4000m
0,2 g
IP 20
*Nota = I nostri convertitori hanno di default una frequenza di modulazione di 5KHz. Esiste un rapporto minimo
tra frequenza di modulazione e frequenza di uscita, che non deve essere inferiore ad 8: questo significa che
con la configurazione di default la frequenza massima che si può ottenere in uscita è 500Hz.
Per quelle applicazioni ove siano richieste frequenze in uscita superiori a 500Hz, i nostri tecnici imposteranno
opportunamente il valore della frequenza di modulazione, declassando in potenza il convertitore, secondo la
seguente tabella:
Ciò significa che, a parità di taglia, la corrente nominale del convertitore sarà ridotta alla percentuale indicata,
a causa dell’aumento delle perdite di commutazione legate alla frequenza di modulazione.
Manuale d’uso
2-2
Serie – DVET PLUS
Rev. 1.0 26/07/06
2.2 CARATTERISTICHE TECNICHE DELLA REGOLAZIONE
ALIMENTAZIONE
SEGNALI
• realizzata con circuito fly-back direttamente dal circuito intermedio corrente
continua
N.8 ingressi digitali optoisolati
• attivazione con +24Vcc (10mA di assorbimento )
• n.8 ingressi configurabili a scelta vedi Manuale Vettoriale
N.3 uscite digitali optoisolate
• attivazione tramite conduzione di transistors +24V (corrente max . ≤ 40mA )
• configurabili a scelta vedi Manuale Vettoriale
N.3 modi per dare il riferimento di velocità in ingresso
• n.4 Riferimenti analogici di velocità ± 10V: tre a 14 bit e uno convertito in freq.
• n.1 Riferimento da segnale in frequenza ( 2 canali o frequenza e direzione)
• n.3 Riferimenti digitali di velocità (Potenziometro digitale, Jog, da Bus di Campo)
N.3 ingressi analogici a 14 bit
1. Riferimento analogico di coppia
2. Limite di coppia
• livello compreso tra ± 10V (assorbimento < 0,5 mA)
• adattabili con parametri sia in segno che in livello
N.2 uscite analogiche programmabili
• livello compreso tra ± 10V (corrente massima fornibile ≤ 2mA)
• uscite configurabili vedi Manuale Vettoriale
N.1 uscita tachimetrica
PROTEZIONI
• Limite di max. coppia motore
• Limite di max. coppia in frenatura
• Limite di max. corrente con rientro
• Protezione di sovratemperatura convertitore
(pastiglia termica radiatore di tipo NTC)
• Protezione di sovratemperatura motore ( pastiglia termica )
• Protezione di sovraccarico motore (I2t ) con rientro del limite di corrente al valore
nominale del motore o con blocco convertitore
• Protezione contro il cortocircuito della potenza
• Protezione contro il cortocircuito della resistenza di frenatura
• Protezione di minima e massima tensione sul circuito intermedio in c.c.
• Disabilitazione convertitore in ingresso per mancanza rete con riavviamento
graduale
CARATTERISTICHE
• Controllo Vettoriale ad Orientamento di Campo Indiretto con Compensazione in
linea delle variazioni della Resistenza rotorica
• Misura della costante di tempo rotorica in autotaratura
• Caratteristica magnetica misurabile in autotaratura o impostabile per punti
• Auto-tuning dei regolatori di corrente e flusso
• Retroazione di velocità da Encoder o da Resolver
• Superamento di mancanze transitorie della rete con funzionamento rigenerativo
del motore ove possibile
• Frenatura con controllo della tensione continua di barra
• Controllo continuo di posizione durante la rotazione o arresto in posizione
Manuale d’uso
2-3
Serie – DVET PLUS
Rev. 1.0 26/07/06
2.3 DIMENSIONI DI INGOMBRO
2.3.1 Serie DVET S1
DVETMODELLO
4
H mm
L
P
Dimensioni
Taglie
M0
5.5 7.5 11
15
18.5
22
30
37
45
55
360
230
185
460
230
230
520
230
270
680
230
250
680
230
290
M0
M1
M1A
M2
M2A
M1
M1A
H
L
P
M2
Manuale d’uso
M2A
2-4
Serie – DVET PLUS
Rev. 1.0 26/07/06
2.3.2 Serie DVET S2
DVETMODELLO
Dimensioni H
4
mm
L
P
Taglie
5,5
7.5
11
18.5
22
30
37
45
55
360
230
185
460
230
230
520
230
270
680
230
250
680
230
290
M0
M1
M1A
M2
M2A
La taglia 15KW in S2 non viene realizzata
M0
M1
M1A
H
L
P
M2
Manuale d’uso
M2A
2-5
Serie – DVET PLUS
Rev. 1.0 26/07/06
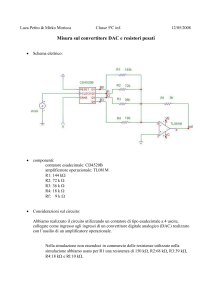
3. AZIONAMENTI INVERTER 75KW 90KW 110KW 132KW TDE MACNO
DIMENSIONE AZIONAMENTI TIPO ‘INVERTER’ DI TAGLIA 75KW S1-S2, 90KW S1-S2, 110KW S1-S2
132KW S1-S2.
C
C
H
L
C
A
D
B
♦
Tutte le quote sono espresse in millimetri
I fori di fissaggio sono previsti per viti 5MA per tutti i modelli
TAGLIA
POTENZA
TP1-A
H
B
L
A
C
D
300
475
905
100
200x3
460
PESO
KG
55
Note:
I collegamenti di potenza sono realizzati a barre (Vite M12 per L1, L2, L3, U, V, W e M10 per +, -, F).
L’alimentazione dei ventilatori è interna.
Manuale d’uso
3-6
Serie – DVET PLUS
Rev. 1.0 26/07/06
4. AMBIENTE CHIUSO, POTENZA DISSIPATA
La potenza dissipata dal convertitore di frequenza funzionante al carico nominale, comprensiva delle perdite
fisse di ventilazione e regolazione e delle perdite della reattanza , è riportata nella tabella seguente.
Portata min. per ricambio aria con ∆t=10°
Potenza max dissipata al carico nominale
DVET PLUS
DVET PLUS
DVET PLUS
DVET PLUS
DVET PLUS
DVET PLUS
DVET PLUS
DVET PLUS
DVET PLUS
DVET PLUS
DVET PLUS
DVET PLUS
DVET PLUS
DVET PLUS
DVET PLUS
4
5.5
7.5
11
15
18.5
22
30
37
45
55
75
90
110
132
m3/h
62
77
92
124
170
200
230
300
370
460
550
680
Watt
200
250
300
400
550
650
750
1000
1200
1500
1800
2200
2900
3500
4200
900
1100
1300
Nel caso di installazione in ambiente chiuso , ad esempio in armadio , occorre fare attenzione a che la
temperatura interna non superi la temperatura ambiente ammessa per il convertitore ( + 40°C) .
L’ambiente va eventualmente ventilato con sufficiente quantità d’aria per asportare il calore generato dal
convertitore e dagli altri componenti.
Per un utilizzo con un carico inferiore al nominale la potenza dissipata scende e si può calcolare con la
seguente relazione :
P dissipata ≅ ½ * Pmax.*(1+ carico effettivo/carico nominale)
Ad esempio , se il carico effettivo è il 75% del carico nominale si ha :
P dissipata ≅ ½ * Pmax * (1+0,75) = 0,875 Pmax
Manuale d’uso
4-1
Serie – DVET PLUS
Rev. 1.0 26/07/06
5. INSTALLAZIONE
5.1 ISTRUZIONI PER L'INSTALLAZIONE DEL CONVERTITORE
Il convertitore di frequenza deve essere installato solo in posizione verticale. Non bisogna effettuare
un'installazione obliqua o orizzontale, poiché in questo modo viene ostacolata la convezione di calore e
questo può causare danneggiamenti. Bisogna garantire una buona accessibilità a tutti gli elementi di
comando.
Il regolare funzionamento e la vita del convertitore di frequenza dipende dal mantenimento
della temperatura ambiente entro i valori consentiti da 0°C fino a +45 °C. La temperatura
dovrebbe quindi essere controllata ad intervalli regolari.
L'umidità dell'aria relativa non deve essere superiore al 90% con nessuna formazione di
condensa .
Il convertitore di frequenza va installato in luogo non polveroso e ben ventilato. Evitare condizioni ambientali
con gas aggressivi in quanto la presenza di polveri abrasive, vapore, olio nebulizzato o aria salmastra,
potrebbe pregiudicare la vita dell'apparecchiatura.
Ulteriori apparecchiature vanno montate a distanza sufficiente dal convertitore onde evitare che possano
cadere all'interno di quest'ultimo dei residui metallici derivati da foratura o da cavi elettrici. In nessun caso il
convertitore va montato in prossimità di materiali facilmente infiammabili.
Distanze minime (mm) da rispettare tenendo
conto anche di un possibile intervento di
manutenzione all'interno del convertitore stesso
>150
>50
Le quote H e P dipendono dalla taglia del
convertitore e sono tabulate nel paragrafo 2.3
(Dimensioni d’ingombro)
>50
H+P
>100
Il convertitore non deve essere installato in ambiente soggetto a forti vibrazioni;
se l’apparecchiatura su cui è installato fosse di tipo mobile, si devono prevedere
opportuni sistemi di smorzamento delle vibrazioni.
Manuale d’uso
5-2
Serie – DVET PLUS
Rev. 1.0 26/07/06
5.2 VENTILAZIONE
Un convertitore di frequenza non può essere montato nel flusso d’aria di raffreddamento di un altro
convertitore di frequenza o di altri impianti. I ventilatori del convertitore servoventilato devono essere installati
considerando il flusso ottimale dell’aria di raffreddamento ( vedi figura).
Manuale d’uso
5-3
Serie – DVET PLUS
Rev. 1.0 26/07/06
5.3 ALLACCIAMENTO ALLA RETE
Per garantire le norme di sicurezza, l’allacciamento alla rete del convertitore deve essere effettuato secondo le
normative elettriche in vigore.
Per i convertitori di taglia superiore ai 30KW deve essere prevista una induttanza limitatrice della
corrente in ingresso (vedi par. 6.1 per il suo dimensionamento).
Il collegamento al convertitore deve essere effettuato in maniera stabile e con cavi di sezione adeguata sia per
.
le tre fasi , morsetti contrassegnati R S T , sia per la terra , vite PE
5.4 COLLEGAMENTO DEL MOTORE
.
Il motore va collegato sui morsetti contrassegnati U , V , W con il cavo di terra collegato alla vite PE
Un cortocircuito tra le fasi U,V,W causa il blocco del convertitore.
In caso di interruzione fra motore ed il convertitore tramite commutatori elettromagnetici (telerutttori, relè
termici, ecc.) occorre garantire che il convertitore venga disabilitato prima dell’interruzione del collegamento
motore-convertitore.
Il tempo di anticipo al blocco del convertitore può essere ottenuto semplicemente giocando sul ritardo di
apertura degli organi elettromeccanici ; è necessario comunque un tempo minimo di 30 ms.
Per lunghezze dei cavi motore superiori ai 30 metri è obbligatorio interporre una reattanza tra
l’azionamento ed il motore. Le caratteristiche di tali reattanze possono essere richieste al personale
TdeMacno.
5.5 COLLEGAMENTO A TERRA DEL CONVERTITORE DI FREQUENZA
La corrente dispersa è la corrente che il convertitore scarica verso il collegamento di terra.
La quantità di questa corrente dispersa dipende dalla lunghezza del cavo dalla presenza o meno dello
schermo ,maggiore nel primo caso , dal motore come pure dal valore della frequenza PWM.
Anche eventuali filtri anti-disturbo possono aumentare la corrente dispersa.
La corrente dispersa contiene grandezze perturbatrici ad alta frequenza.
Per evitare problemi di compatibilità elettromagnetica con altre apparecchiature , il collegamento a terra del
convertitore di frequenza per quanto possibile deve avvenire con cavo proprio e di sezione non inferiore a
quanto riportato in tabella (vedi capitolo 6).
.
.
Il convertitore di frequenza non può funzionare senza conduttore di protezione collegato
stabilmente a terra.
Se l’impianto dove viene installato l’inverter è dotato di salvavita, quest’ultimo deve essere
tarato per una corrente di intervento non inferiore a 100mA e per un tempo di intervento
non inferiore a 100ms; deve inoltre poter sopportare disturbi ad alta frequenza.
Manuale d’uso
5-4
Serie – DVET PLUS
Rev. 1.0 26/07/06
5.6 ACCORGIMENTI ANTIDISTURBO
Apparecchiature elettriche od elettroniche possono influenzarsi reciprocamente per via dei collegamenti di rete
od altre connessioni metalliche fra di loro. Al fine di minimizzare od eliminare l’influenza reciproca, è
necessaria una corretta installazione del convertitore stesso in congiunzione con eventuali accorgimenti
antidisturbo.
I seguenti avvisi si riferiscono ad una rete di alimentazione non disturbata. Se la rete è disturbata, devono
essere presi altri accorgimenti per ridurre i disturbi.
In questi casi non è possibile dare dei consigli generali e se gli accorgimenti antidisturbo non dovessero dare i
risultati desiderati, preghiamo di interpellare la TDE MACNO.
• Assicurarsi che tutti gli equipaggiamenti nell'armadio siano bene collegati alla sbarra di terra usando cavi
corti connessi a stella. È particolarmente importante che qualsiasi equipaggiamento di controllo connesso
al convertitore ,ad esempio PLC , sia connesso alla stessa terra con cavi corti .
• Il convertitore deve essere fissato con viti e rondelle dentate per garantire un buon collegamento elettrico
tra il contenitore esterno ed il supporto metallico ,collegato a terra ,del quadro; se necessario occorre
togliere il colore per garantire un buon contatto.
• Per il collegamento del motore usare solo cavi schermati o armati e collegare la schermatura alla terra sia
dalla parte del convertitore che dalla parte del motore. Se non fosse possibile l’uso di cavi schermati, i cavi
del motore dovrebbero venire posati in una canaletta metallica collegata a terra.
• Tenere separati e distanziati tra di loro i cavi di collegamento del motore, del convertitore ed i cavi di
controllo.
• Per il collegamento della resistenza di frenatura usare cavo schermato e collegare lo schermo a terra ad
entrambi i lati , convertitore e resistenza.
• posare i cavi di controllo distanti almeno 10 cm da eventuali cavi di potenza paralleli. Anche in questo caso
è consigliabile l’uso di una canaletta metallica separata e collegata a terra. Se i cavi di controllo si
dovessero incrociare con i cavi di potenza, mantenere un angolo d’incrocio di 90°.
• Prevedere dei gruppi RC o diodo volano per le bobine dei teleruttori, relè ed altri commutatori
elettromeccanici che fossero installati nello stesso armadio del convertitore , montati direttamente sui
collegamenti delle bobine stesse.
• Eseguire tutti i collegamenti di controllo, misurazione e regolazione esterni con cavi schermati .
• Cavi sui quali si possono diffondere disturbi devono essere posati separatamente e distanti dai cavi di
controllo del convertitore.
Se il convertitore deve operare in un ambiente particolarmente sensibile al rumore
prendere i seguenti provvedimenti per ridurre le interferenze condotte e irradiate:
occorre , inoltre ,
• Inserire un filtro di rete fra il convertitore e la linea montato il più vicino possibile al convertitore con
collegamenti i più corti possibili.
• Inserire , eventualmente , anche una induttanza di filtro di modo comune fra il convertitore ed il motore
tenendola il più vicino possibile al convertitore.
• Adottare per l'armadio tutti gli accorgimenti possibili atti a bloccare le emissioni irradiate quali messa a
terra di tutte le parti metalliche , minima apertura di fori sull'involucro esterno , uso di guarnizioni
conduttrici.
Manuale d’uso
5-5
Serie – DVET PLUS
Rev. 1.0 26/07/06
6. DIMENSIONAMENTO
6.1 CAVI, FUSIBILI, IMPEDENZA DI LINEA E RESISTENZE DI FRENATURA
Serie S1
CONVERT.
Taglia
( KW )
1.5
3
4
5.5
7.5
11
15
18.5
22
30
37
45
55
75
90
110
132
Fusibili
Impedenza di linea minima
Sezione cavi
rapidi
collegamento
Taglie
Induttanza Corrente Corrente rete e mot.
Cavo di
consigliate
minima
termica
saturaz. RST,UVW
prot. PE
( A )
(mH)
(A)
Picco (A)
mm2
mm2
5-15
5.84
4,2
11.7
1.5
1.5
10-20
3.43
7.1
20
1.5
1.5
10-20
2.67
9.1
25.7
2.5
2.5
15-25
2.06
11.7
33.1
2.5
2.5
20-35
1.58
18.1
51.2
4
4
25-35
1.12
21.7
61.3
6
6
40-63
0.84
29
81.7
10
10
50-63
0.68
35.5
100
10
10
50-63
0.58
42
118
16
16
80-100
0.44
55.7
157
25
25
80-100
0.36
67.0
189
25
25
100-160
0.3
81.2
229
35
25
125-160
0.245
99
279
50
35
160-240
0.198
122
344
70
50
240-300
0.15
162
455
90
50
240-300
0.123
197
555
120
70
300-400
0.103
236
666
120
70
Resistenza di frenatura
Valore
consigliato
(Ω)
220
120
68
68
47
37
27
22
18
12
10
8,9
7,3
5
4
3
2,7
Potenza
minima
(W)
100
120
220
220
300
440
600
740
880
1200
1500
1800
2200
3000
4000
5300
6000
Serie S2
CONVERT.
Taglia
( KW )
1.5
3
4
5.5
7.5
11
18.5
22
30
37
45
55
75
90
110
132
Fusibili
Impedenza di linea minima
Sezione cavi
rapidi
collegamento
Taglie
Induttanza Corrente Corrente rete e mot.
Cavo di
consigliate
minima
termica
saturaz. RST,UVW
prot. PE
( A )
(mH)
(A)
Picco (A)
mm2
mm2
5-15
5.84
4.2
15.6
1.5
1.5
10-20
3.43
7.1
26.6
1.5
1.5
10-20
2.67
9.1
34.2
2.5
2.5
15-25
2.06
11.7
44.1
2.5
2.5
20-35
1.58
15.3
57.5
4
4
25-35
1.12
21.7
81.7
6
6
50-63
0.68
35.5
133.4
10
10
50-63
0.58
42.0
158
16
16
80-100
0.44
55.7
209
25
25
80-100
0.36
68.1
252
25
25
100-160
0.3
81.2
305
35
25
125-160
0.245
100
372
50
35
160-240
0.198
122
460
70
50
240-300
0.15
161
607
90
50
240-300
0.123
197
741
120
70
300-400
0.103
236
888
120
70
Manuale d’uso
6-1
Resistenza di frenatura
Valore
consigliato
(Ω)
150
100
56
56
39
27
15
12
10
8.5
6.8
5.6
4.7
3.3
2.7
2.2
Potenza
minima
(W)
100
120
220
220
300
440
740
880
1200
1500
1800
2200
3000
4000
5300
6000
Serie – DVET PLUS
Rev. 1.0 26/07/06
La scelta delle sezioni dei conduttori e dei fusibili è stata fatta secondo le norme CEI EN 60204-1, materiale
per conduttori rame, classe di installazione B1. Tutti i dati relativi alle sezioni dei conduttori e taglie dei fusibili
sono solo raccomandati, vanno comunque sempre rispettate le norme e disposizioni nazionali.
I fusibili devono essere di tipo ultrarapido o rapido.
Per il dimensionamento del cavo del motore bisogna tener presente che con frequenze inferiori a 50Hz la
tensione di uscita diventa proporzionalmente inferiore a 400V e quindi aumenta la caduta percentuale della
tensione del conduttore. Per frequenze più basse va scelta la sezione del cavo della taglia immediatamente
superiore.
In caso di installazione del convertitore di frequenza sotto un trasformatore la cui potenza sia
superiore a due volte la potenza del convertitore si raccomanda l’installazione di una induttanza di ingresso in
modo da presentare al convertitore una impedenza uguale o superiore a quella di tabella.
L’induttanza in ingresso è obbligatoria per convertitori di taglia maggiore uguale ai 37KW (visto l’uso
di un ponte raddrizzatore semi-controllato) ma è consigliata anche per le taglie inferiori, in quanto
migliora il fattore di forma della corrente assorbita dalla linea, riducendo l’entità delle correnti
armoniche.
La scelta dell’induttanza di ingresso avviene in funzione della potenza del convertitore di
frequenza e deve essere tale da garantire una caduta minima di tensione superiore a 6.6V alla corrente
nominale assorbita dal convertitore e non deve saturare ad una corrente efficace doppia di quella nominale.
Se si usa il dispositivo di frenatura occorre prevedere una resistenza con valore in Ω non inferiore al valore di
tabella , in grado di reggere transitoriamente una tensione di 800 Vcc e con dimensionamento in energia e
potenza superiore a quanto viene chiesto dal ciclo della macchina; la potenza indicata in tabella è un valore
minimo che si può usare nel caso di frenature poco frequenti e per macchine con poca inerzia , due tre volte
quella del motore; se è previsto un funzionamento a potenza costante in una certo range di frequenza (ad es.
2 volte la velocità base) è consigliabile dimensionare la potenza della resistenza tenendo conto di tale
coefficiente (2×Pmin).
6.2 MOTORE
Il motore deve essere previsto per funzionamento sotto convertitore tipo PWM , in particolare per quanto
riguarda i seguenti aspetti:
• Isolamento
deve tenere conto sia dei fronti di tensione dovuti alla modulazione ( gradiente di
tensione dell’ordine di 2000 – 4000 V/µs ) sia delle possibili sovratensioni dovute alla
riflessione dei cavi di collegamento ( valori di picco per cavi lunghi ,50 - 70 o più metri ,
anche di 1000 -1200 V ).
• Raffreddamento si deve tenere conto sia dell’aumento delle perdite dovuto alle armoniche di corrente con
un sovradimensionamento del motore dell'ordine del 5 - 10 % , sia ,nel caso dei motori
autoventilati , della diminuita efficienza della ventilazione al diminuire della velocità con
conseguente minore capacità di smaltimento calore .
Motori autoventilati possono essere usati o con carichi con coppia che diminuisce al
diminuire della velocità (come si ha ad esempio nei ventilatori in cui essa varia
quadraticamente con la velocità), oppure devono essere opportunamente
sovradimensionati .
Manuale d’uso
6-2
Serie – DVET PLUS
Rev. 1.0 26/07/06
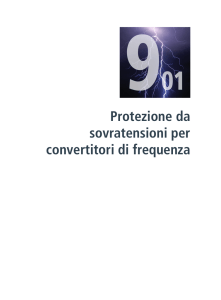
7. PROPOSTE DI COLLEGAMENTO CON I PARAMETRI DI DEFAULT
7.1 RIFERIMENTO DI VELOCITÀ DA POTENZIOMETRO ESTERNO
1) L`azionamento va in marcia se non c’è allarme (“PRONTOMARCIA” attivo) e si chiude il contatto di
“MARCIA”.
2) Il riferimento proviene dal potenziometro esterno (da abilitare con “AB. REF2”)
3) Con l’impostazione di default il rilascio del motore avviene immediatamente non appena si apre il
CONTATTO DI MARCIA ; se si imposta C28 = 1 il rilascio avviene solo dopo che il motore si è portato al di
sotto della velocità impostata in P50 .
4) L’interruzione elettromeccanica del motore si può avere interponendo un contattore fra linea e convertitore
oppure fra convertitore e motore. Nel primo caso si deve tenere presente che all’apertura del contattore si
perde anche l’alimentazione della regolazione e che dopo la sua chiusura occorre aspettare il tempo di
alimentazione e di precarica (circa 2-3 sec.) prima di mettere in marcia il convertitore.
Se il contattore viene interposto fra il convertitore ed il motore occorre fare in modo che all’arresto prima
venga bloccato il convertitore e dopo 30÷40 ms si apra l’interruttore; per far questo è sufficiente il ritardo di
un relè ausiliario usato dopo il blocco del convertitore per far cadere il teleruttore oppure è sufficiente
usare una bobina ritardata al rilascio (ad es. bobina in corrente continua con un condensatore in parallelo).
Alla marcia, invece , occorre che prima si chiuda il teleruttore e poi venga sbloccato il convertitore.
R
S
T
.
DVETPlus
T
S
R
F
+
RESITENZA
FRENATURA
PE
U
V
W
M
3~
SENSORE
DI VELOCITA`
Manuale d’uso
M1
L.I.1
L.I.2
L.I.3
L.I.4
L.I.5
L.I.6
L.I.7
L.I.8
L.I.C
0P
+24P
+VAU
L.O.1
/L.O.1
L.O.2
/L.O2
L.O.3
/L.O.3
A.I.3
A.I.2
A.I.1
K1
M2
Per avere un comportamento corretto
del convertitore occorre prima eseguire
(vediPar
manuale
l`autotaratura (vedi
19) vettoriale)
AG
+10VOUT
AG
T.G.O.
VOUTB
VOUTA
AG
AG
-10VOUT
S.REF
/S.REF
E-A
E-/A
E-B
E-/B
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
7-1
CONTATTO DI MARCIA
ABILITAZIONE REF2
INVERSIONE DI ROTAZIONE
CONSENSO ESTERNO
RIPRISTINO ALLARMI
PRONTO MARCIA
VELOCITA`
LAVORO
CORRENTE
LAVORO
RIFERIMENTO
VELOCITA`
Serie – DVET PLUS
Rev. 1.0 26/07/06
7.2 RIFERIMENTO DI VELOCITÀ DA POTENZIOMETRO DIGITALE
1) L’azionamento va in marcia se non c’è allarme (“PRONTOMARCIA” attivo) e se si chiude il contatto di
“MARCIA”.
2) Il riferimento proviene dal potenziometro digitale (da abilitare con “AB. POT. DIGITALE”) ed il suo valore
può essere aumentato o diminuito tramite i pulsanti "AUMENTA RIF." e "DIMINUISCI RIF." solo se
l’azionamento è in marcia.
3) Con l’impostazione di default il rilascio del motore avviene immediatamente non appena si apre il
CONTATTO DI MARCIA ; se si imposta C28 = 1 il rilascio avviene solo dopo che il motore si è portato al
di sotto della velocità impostata in P50 .
4) L’interruzione elettromeccanica del motore si può avere interponendo un contattore fra linea e
convertitore oppure fra convertitore motore. Nel primo caso si deve tenere presente che all’apertura del
contattore si perde anche l’alimentazione della regolazione e che dopo la sua chiusura occorre aspettare
il tempo di alimentazione e di precarica (circa 2-3 sec.) prima di mettere in marcia il convertitore.
Se il contattore viene interposto fra l’inverter e il motore occorre fare in modo che all’arresto prima venga
bloccato il convertitore e dopo , 30÷40 ms , si apra l’interruttore ; per far questo è sufficiente il ritardo di
un relè ausiliario usato dopo il blocco del convertitore per far cadere il teleruttore oppure è sufficiente
usare una bobina ritardata al rilascio ( ad es. bobina in corrente continua con un condensatore in
parallelo).
Alla marcia, invece , occorre che prima si chiuda il teleruttore e poi venga sbloccato il convertitore.
R
S
T
.
DVETPlus
T
S
R
F
+
RESITENZA
FRENATURA
PE
U
V
W
M
3~
SENSORE
DI VELOCITA`
M1
L.I.1
L.I.2
L.I.3
L.I.4
L.I.5
L.I.6
L.I.7
L.I.8
L.I.C
0P
+24P
+VAU
L.O.1
/L.O.1
L.O.2
/L.O2
L.O.3
/L.O.3
A.I.3
A.I.2
A.I.1
K1
M2
Per avere un comportamento corretto
del convertitore occorre prima eseguire
(vediM
manuale
l`autotaratura (vedi
anualevettoriale)
Vettoriale)
AG
+10VOUT
AG
T.G.O.
VOUTB
VOUTA
AG
AG
-10VOUT
S.REF
/S.REF
E-A
E-/A
E-B
E-/B
AUMENTA RIFERIMENTO
DIMINUISCE RIFERIMENTO
ABILITAZIONE POTENZ. DIGITALE
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
CONTATTO DI MARCIA
INVERSIONE DI ROTAZIONE
CONSENSO ESTERNO
RIPRISTINO ALLARMI
PRONTO MARCIA
VELOCITA`
LAVORO
CORRENTE
LAVORO
25
26
27
28
29
30
31
32
33
34
35
36
Manuale d’uso
7-2
Serie – DVET PLUS
Rev. 1.0 26/07/06
8. MORSETTIERE
8.1 DISPOSIZIONE FISICA
DVETPlus
MORSETTIERA
DI POTENZA
R
S
T
U
V
F
W
PE
s - +
J1
CONNETTORE
SERIALE
1
J2
USCITA ENCODER
SIMULATO
36
M1
MORSETTIERA
DI CONTROLLO
1
14
M2
INGRESSO
SENSORE DI VELOCITA’
8.2 MORSETTIERA DI POTENZA
MORSETTO
R
S
T
PE
Alimentazione trifase
F
Resistenza esterna di frenatura
+
-
Bus DC
DESCRIZIONE
Standard
3 x 400 / 460V
+10% -15%
Convertitore, motore e accessori devono
essere collegati a una presa di terra.
Collegamento di un capo della resistenza
esterna di frenatura, l’altro capo va al +
Circuito intermedio in corrente continua
Alimentazione motore
Morsetti di collegamento al motore
U
V
W
FUNZIONI
Terra rete
Invertire gli allacciamenti alimentazione su “ U, V, W “ e cavi motore su “ R,S,T “ può
danneggiare gravemente il convertitore.
Manuale d’uso
8-1
Serie – DVET PLUS
Rev. 1.0 26/07/06
8.3 MORSETTIERA DI CONTROLLO (M1)
MORS FUNZIONI
DESCRIZIONE
1
L.I.1
Ingresso logico configurabile 1 (vedi manuale vettoriale) +24V dc 10 mA max.
Configurazione di default : RIPRISTINO ALLARMI
2
L.I.2
Configurazione eseguita da TdeMacno: Aumenta potenziometro Digitale
Ingresso logico configurabile 2 (vedi manuale vettoriale) +24V dc 10 mA max.
Configurazione di default : CONSENSO ESTERNO
3
L.I.3
Configurazione eseguita da TdeMacno: Diminuisce potenziometro Digitale
Ingresso logico configurabile 3 (vedi manuale vettoriale) +24V dc 10 mA max.
Configurazione di default : ABILITA RIFERIMENTO A.I.1
4
L.I.4
Configurazione eseguita da TdeMacno: Abilita Rif. di velocità da potenziometro digitale
Ingresso logico configurabile 4 (vedi manuale vettoriale) +24V dc 10 mA max.
Configurazione di default:
MARCIA
5
L.I.5
Configurazione eseguita da TdeMacno: Marcia
Ingresso logico configurabile 5 (vedi manuale vettoriale) +24V dc 10 mA max.
Configurazione di default : ABILITA RIFERIMENTO A.I.2
6
L.I.6
Configurazione eseguita da TdeMacno: Abilita Riferimento A.I.1
Ingresso logico configurabile 6 (vedi manuale vettoriale) +24V dc 10 mA max.
Configurazione di default : INVERSIONE RIFERIMENTO CW/CCW
7
L.I.7
Configurazione eseguita da TdeMacno: Inversione Riferimento CW/CCW
Ingresso logico configurabile 7 (vedi manuale vettoriale) +24V dc 10 mA max.
Configurazione di default : ABILITA JOG
8
L.I.8
Configurazione eseguita da TdeMacno: Consenso Esterno
Ingresso logico configurabile 8 (vedi manuale vettoriale) +24V dc 10 mA max.
Configurazione di default : ABILITA RAMPE
9
L.I.C
10
11
12
13
0P
+24V
L.O.1
14
/L.O.1
15
L.O.2
16
/L.O.2
17
L.O.3
18
/L.O.3
Configurazione eseguita da TdeMacno: Ripristino Allarmi
Comune di tutti gli ingressi logici da collegare al negativo dell’alimentazione degli ingressi .
Tutti gli ingressi sono opto-isolati dalla regolazione interna.
Punto negativo della alimentazione interna +24V, isolata dalla regolazione
Punto positivo della alimentazione interna +24V, isolata dalla regolazione
Uscita logica configurabile 1 (vedi manuale vettoriale) +24 Vdc 40 mA ; transistor npn
con collettore ( L.O.1 )ed emettitore ( /L.O.1 ) liberi , isolato dalla regolazione e
protetto dalle sovratensioni . CONDUCE quando l’uscita è ATTIVA
Configurazione di default CONVERTITORE IN MARCIA
Configurazione eseguita da TdeMacno: Convertitore in Marcia
Uscita logica configurabile 2 (vedi manuale vettoriale) +24 Vdc 40 mA ; transistor npn con
collettore ( L.O.2 )ed emettitore ( /L.O.2 ) liberi , isolato dalla regolazione e
protetto dalle sovratensioni . CONDUCE quando l’uscita è ATTIVA
Configurazione di default
PRONTO MARCIA
Configurazione eseguita da TdeMacno: Pronto Marcia
Uscita logica configurabile 3 (vedi manuale vettoriale) +24 Vdc 40 mA ; transistor npn
con collettore ( L.O.3 )ed emettitore ( /L.O.3 ) liberi , isolato dalla regolazione e
protetto dalle sovratensioni . CONDUCE quando l’uscita è ATTIVA
Configurazione di default FINE RAMPA
Configurazione eseguita da TdeMacno: Rampa Riferimento Finita
Manuale d’uso
8-2
Serie – DVET PLUS
Rev. 1.0 26/07/06
19
A.I.3
Ingresso analogico (±10Vdc ± 0,25mA );segnale di limitazione di coppia (vedi man. vettoriale)
20
A.I.2
Ingresso analogico (±10Vdc ± 0,25mA );segnale di riferimento di coppia (vedi man. vettoriale)
21
A.I.1
Ingresso analogico (±10Vdc ± 0,25mA );segnale di riferimento di velocità (vedi man. vettoriale)
22
AG
23
Zero comune a tutti gli ingressi analogici ed a tutta la regolazione
+10 VOUT Alimentazione stabilizzata positiva ( +10 V dc 5 mA )
24
AG
25
T.G.O.
26
VOUTB
27
VOUTA
28-29
AG
30
-10VOUT
31
32
33
S.REF
/S.REF
E-A
34
E-/A
35
E-B
36
E-/B
Manuale d’uso
Zero della alimentazione stabilizzata e di tutta la regolazione
Segnale dell’uscita analogica configurabile B ( vedi manuale vettoriale) ± 10 V dc 2 mA
Configurazione di default VELOCITÀ DI LAVORO
Segnale dell’uscita analogica configurabile B ( vedi manuale vettoriale) ± 10 V dc 2 mA
Configurazione di default VELOCITÀ DI LAVORO
Segnale dell’uscita analogica configurabile A ( vedi manuale vettoriale) ± 10 V dc 2 mA
Configurazione di default CORRENTE DI LAVORO
Zero comune a tutte le uscite analogiche ed a tutta la regolazione
Alimentazione stabilizzata negativa ( -10 V dc 5 mA )
Ingresso analogico differenziale (± 10 Vdc ± 0,25 mA ) , riferimento di velocità ad alta
risoluzione (vedi manuale vettoriale)
Ingresso del canale A di frequenza se differenziale, altrimenti non collegato. (vedi manuale
vettoriale)
Ingresso del canale /A di frequenza o ingresso in frequenza. (vedi manuale vettoriale)
Ingresso del canale B di frequenza se differenziale, altrimenti non collegato. (vedi manuale
vettoriale)
Ingresso del canale /B di frequenza o della direzione (UP/DOWN). (vedi manuale
vettoriale)
8-3
Serie – DVET PLUS
Rev. 1.0 26/07/06
8.4 INGRESSO SENSORE DI VELOCITA` (M2)
MORSETTO
1
2
3
4
5
6
7
8
9
10
11
12
13
14
ENCODER
/B
B
/A
A
/C (/TOP ø)
C (TOP ø)
0V
+5V
NC
NC
NC
NC
NC
NC
RESOLVER
NC
NC
0COS
COS
0SIN
SIN
REFREF+
NC
NC
NC
NC
-PT
+PT
8.4.1 Encoder
Il sensore di velocità utilizzato nella configurazione base e` un ENCODER da 5V con uscita “Line Driver” in
differenziale, con un numero di impulsi giro massimi tali da non superare i 200KHz per canale; la corrente
assorbita non deve essere superiore ai 100mA. I canali A, /A, B, /B, Top0, /Top0 possono avere un’ampiezza
massima di 24VDC. Nel caso di Encoder 8/24V alimentare l’Encoder con una sorgente esterna, accomunare
gli 0V (PIN 7 di M2) con lo 0V della sorgente
8.4.2 Resolver
Se si vuole utilizzare un RESOLVER, esso andrà collegato come in figura:
CONNETTORE
MOTORE
RESOLVER
RAPPORTO TRASF.
1: 0.5
1: 0.45
M2
USCITA ALIMENTATORE RESOLVER
(6,5 VOLT RMS - 5KHz - MAX 20mA)
INGRESSO SEGNALE RESOLVER
INGRESSO SEGNALE RESOLVER
PASTIGLIA TERMICA MOTORE
REF-
7
R1
REF+ 8
R3
0COS 3
S1
COS
4
S3
0SIN
5
S4
SIN
6
S2
-PT
13
PT
14
SONDA
TERMICA
MOTORE
GROUND
CAVO DI
COLLEGAMENTO
I RESOLVER DEVONO ESSERE O QUELLI INDICATI NELLA TABELLA,O CON
RESOLVER
ARTUS
ES. 26S19RX452b.F
UTILIZZATI
TAMAGAWA ES. TS2640N71E10
RAP.TRAS. 0.5
CARATTERISTICHE EQUIVALENTI .
RAP.TRAS. 0.5
IL CAVO DI COLLEGAMENTO DEVE ESSERE DEL TIPO A 4 DOPPINI INTRECCIATI E
SCHERMATI PIU'SCHERMO ESTERNO.
GLI SCHERMI ACCOMUNATI DAL LATO DEL CONNETTORE M2 VANNO COLLEGATI ALLA
4x(2x0.25SK) COD. 2MB 24P 04R
Manuale d’uso
BOCCOLA DI MASSA DELL’AZIONAMENTO
8-4
Serie – DVET PLUS
Rev. 1.0 26/07/06
8.4.3 Pastiglia termica motore
L’azionamento può gestire solo pastiglie termiche di tipo ON/OFF (Bimetalliche). Non possono essere gestite
pastiglie termiche di tipo PTC, NTC o PT100.
La gestione della pastiglia termica motore dipende dal tipo di sensore di velocità utilizzato:
ENCODER
RESOLVER
Manuale d’uso
in questo caso è necessario configurare uno degli ingressi logici gestendo quindi il
segnale proveniente dalla pastiglia termica come uno qualsiasi degli ingressi logici
(vedi manuale vettoriale).
utilizzando questo sensore di velocità si potrà portare il segnale
proveniente dalla pastiglia termica motore direttamente sulla
morsettiera M2 ai morsetti 13 e 14. Per abilitare il monitoraggio di
questo segnale si dovrà porre C46=2 (Abilita segnale /PTM da cavo
resolver). Rimane valida comunque la possibilità di gestire la pastiglia
termica come un ingresso logico allo stesso modo dell’Encoder.
8-5
Serie – DVET PLUS
Rev. 1.0 26/07/06
8.5 CONNETTORE DELLA LINEA SERIALE (CONNETTORE J1)
120
1K
DG
1K
+5E
TERM+
TERM-
LINEA SERIALE
P92
P94
RX+
NUMERO
RX-
IDENTIFICAZIONE
TX+
TXDG
AZIONAMENTO
RS485
VASCH. FEM. 9 VIE
5
9
4
8
3
7
2
6
1
DG
La linea seriale comunica in half duplex su quattro fili: RX+ ed RX- sono fili di ricezione per l’azionamento
mentre TX+ ed TX- sono fili di trasmissione.
È prevista la possibilità di ‘ terminare ‘ la connessione di ricezione con 120Ω di impedenza polarizzando la
linea e collegando i morsetti 5 con 3 e 9 con 7 rispettivamente.
8.6 SEGNALI ENCODER SIMULATO (CONNETTORE J2)
Nel caso in cui il sensore di velocità sia un Encoder i segnali in uscita dall`Encoder Simulato non saranno altro
che un immagine di quelli forniti al convertitore.
Nel caso in cui il sensore di velocità sia un Resolver, i segnali avranno una frequenza dipendente dai giri
motore, dal numero poli del resolver e dalla selezione fatta (vedi connessione c50,c51,c49) ed avranno
l’andamento nel tempo dipendente dal segno dal senso di rotazione e da c49 come riportato nelle figure
sottostanti:
d21>0 con c50=0
d21<0 con c50=1
CONNETTORE TIPO DB9 MASCHIO
J2
1
/B
2
3
B
/A
4
5
A
VS (+)
6
7
8
/C
C
9
0VS
A
CANALE B
B
CANALE A
C
CANALE C
*A
*B
*C
+VS
0VS
+VS
0VS
+VS
0VS
d21>0 con c50=1
d21<0 con c50=0
A
B
C
+VS
0VS
+VS
0VS
+VS
0VS
*A
*B
*C
+VS
0VS
+VS
0VS
+VS
0VS
+VS
0VS
+VS
0VS
+VS
0VS
5V≤VS≤15V
Fmax=200KHz per canale
Le uscite del simulatore di encoder sono tutte pilotate da un “ LINE DRIVER”. Il loro livello e` normalmente
riferito a +5V proveniente dall`interno; su richiesta e` possibile riferire il livello ad un`alimentazione proveniente
dall`esterno, compresa fra 5 e 24 V.
Per l`immunità è opportuno utilizzare in arrivo un ingresso differenziale per evitare la formazione di maglie con
lo zero del riferimento; per limitare l’effetto di eventuali disturbi è opportuno caricare tale ingresso (10mA max).
È necessario l’utilizzo di un cavo schermato a doppini twistati per eseguire un corretto collegamento.
Attenzione, lo zero dell`alimentazione esterna viene accumunato con quello del
convertitore; non è optoisolato.
Attenzione, per il simulatore di encoder con alimentazione interna (versione standard
del convertitore) non bisogna collegare il morsetto 5 (VS) perchè potrebbe
danneggiare seriamente il convertitore.
Manuale d’uso
8-6
Serie – DVET PLUS
Rev. 1.0 26/07/06
8.6.1 CONFIGURAZIONE DELL’USCITA DI SIMULAZIONE ENCODER (CONNETTORE J2)
Se il sensore di velocita` utilizzato e` un Resolver, i due canali di simulazione encoder di tipo bidirezionale
potranno avere un numero di impulsi per giro motore selezionabile con c18 secondo la seguente tabella:
Imp/giro motore/(P68/2)
0
64
128
256
512
1024
2048
4096
c51
0
1
2
3
4
5
6
7
Il valore di default di c51=5
Come si vede il numero di impulsi dipende anche dal numero di poli del resolver, impostati al parametro P68,
ed in particolare valgono i numeri sopra scritti se il resolver è a due poli.
L’uscita degli impulsi è pilotata da un line driver (ET 7272), comunque la scelta del numero di impulsi deve
essere tale da ottenere una frequenza massima per canale minore di 200kHz.
Il terzo canale genera un numero di impulsi di zero in fase col canale A, pari al numero di poli del resolver
diviso due (P68/2) ; in particolare si ha un unico impulso di zero per giro motore con resolver a due poli.
La posizione dell’impulso di zero dipende dal calettamento del resolver sull’albero motore; comunque rispetto
alla posizione originale, decodifica dello zero della posizione del resolver, tale posizione può essere spostata
con passi di 90° elettrici (relativi al resolver) con la connessione c49 secondo la seguente tabella :
Spostamento impulso zero
resolver
+0°
+90°
+180°
+270°
c49
0
1
2
3
Il valore di default è 0.
Tali gradi elettrici corrispondono ai gradi meccanici se il resolver è a due poli.
La connessione c50 inverte il canale B dell’ encoder simulato invertendo cosi la sua fase rispetto al canale A,
a pari senso di rotazione del motore.
Per default c50=0.
Manuale d’uso
8-7
Serie – DVET PLUS
Rev. 1.0 26/07/06
9. INGRESSI LOGICI
9.1 POSSIBILI COLLEGAMENTI
È’ possibile comandare gli ingressi logici usando sia l’alimentazione interna 0P +24V , disponibile ai morsetti
10 e 11 della morsettiera del controllo , come pure un’alimentazione esterna ; il comando si può fare usando
contatti liberi o transistor. I vari tipi di collegamento sono esemplificati nelle figure seguenti.
COMANDO INGRESSI CON ALIMENTAZIONE
INTERNA
COMANDO INGRESSI CON ALIMENTAZIONE
ESTERNA
M1
M1
1
L.I.1
1
L.I.1
2
L.I.2
2
L.I.2
3
L.I.3
3
L.I.3
4
L.I.4
4
L.I.4
5
L.I.5
5
L.I.5
6
L.I.6
6
L.I.6
7
L.I.7
7
L.I.7
8
L.I.8
8
L.I.8
9
L.I.C
9
L.I.C
+24E
0E
10 0P
10 0P
11 +24
11 +24
COMANDO INGRESSI CON ALIMENTAZIONE
INTERNA, DA PLC
COMANDO INGRESSI CON ALIMENTAZIONE
ESTERNA, DA PLC
M1
M1
1
L.I.1
1
L.I.1
2
L.I.2
2
L.I.2
3
L.I.3
3
L.I.3
4
L.I.4
4
L.I.4
5
L.I.5
5
L.I.5
6
L.I.6
6
L.I.6
7
L.I.7
7
L.I.7
8
L.I.8
8
L.I.8
9
L.I.C
+24E
9
L.I.C
0E
10 0P
11 +24
Manuale d’uso
10 0P
11 +24
9-1
Serie – DVET PLUS
Rev. 1.0 26/07/06
9.2 CARATTERISTICHE ELETTRICHE
Gli ingressi logici diventano attivi per livello alto mentre sono inattivi per livello basso.
Livello alto ( H ) o livello 1 : Tensione compresa fra 20 e 28V cc assorbimento compreso fra 5 e 10 mA
Livello basso ( L ) o livello 0 : Tensione compresa fra 0 e 6V cc assorbimento inferire a 10 µA;
10. USCITE LOGICHE
10.1 POSSIBILI COLLEGAMENTI
Essendo le uscite logiche dei transistor liberi sia nel collettore che nell’emettitore esse possono essere
indifferentemente usate con l’alimentazione interna o esterna e con carichi connessi fra l’emettitore e lo 0 o fra
il collettore e l’alimentazione positiva ; la presenza dello zener interno elimina la necessità del diodo volano
anche con carichi induttivi come le bobine dei relè .
Le figura seguente esemplifica entrambi i tipi di possibile utilizzo con alimentazione esterna ; è possibile anche
l’utilizzo della alimentazione interna 0P +24V disponibile ai morsetti 10 e 11 del connettore della regolazione .
M1
L.O.1
13
20-30 V
48V
L.O.1
14
L.O.2
15
L.O.2
16
L.O.3
17
L.O.3
18
48V
48V
GND
10.2 CARATTERISTICHE ELETTRICHE
Quando l’uscita logica è non attiva , livello basso ( L ) o livello 0 , il transistor non conduce , viceversa entra in
conduzione non appena l’uscita diventa attiva , livello alto ( H ) o livello 1.
Livello basso ( L ) o livello 0 : Transistor bloccato corrente inferiore a 100 µA;
Livello alto ( H ) o livello 1 : Transistor in conduzione satura con corrente disponibile minore di 40 mA;
Tensione di lavoro consigliata V < 30V cc ; tensione massima applicabile 40V cc.
Tensione del diodo zener di protezione Vz = 47 V ± 5%
Massima potenza del diodo zener 500 mW
Manuale d’uso
10-1
Serie – DVET PLUS