Università degli Studi di Macerata
Corso di Elementi di Fisica - A.A. 2015/16
Prof. Manlio Bellesi
IL MOTO CIRCOLARE UNIFORME
Come dice il nome, è il moto di un oggetto che gira attorno ad un punto fisso O, mantenendo costante la distanza R da
esso e la velocità v. Attenzione: v e R sono i moduli dei vettori v ed R , che non sono
costanti perché la loro direzione cambia di continuo mentre l’oggetto si muove in cerchio.
Solo i moduli sono costanti.
Oltre al raggio R e alla velocità v, le quantità che ci interessano del moto circolare uniforme
sono:
1) La velocità angolare (ω):
v
ω =
(ω = “Omega”) [radianti / secondo]
R
Fisicamente è forse la grandezza più importante per il moto circolare, perché dà una misura
di quanto tale moto viene “sentito” dall’oggetto (es. per la Terra è ω ≅ 7,2⋅10-5 rad/s, un
valore molto piccolo; quindi non ci accorgiamo di stare girando). Le dimensioni di ω sono
Fig. A - Moto circolare
riportate in parentesi quadra: normalmente sui libri si trova [radianti/secondo] anziché solo
uniforme
[1/secondo]. Il radiante è un’unità di misura per angoli e non cambia sostanzialmente le
cose.
2) Il periodo (T): è il tempo che occorre al corpo per fare un giro completo. Siccome la velocità è costante e la
lunghezza della circonferenza è 2πR, si trova che v è il rapporto (spazio / tempo):
spazio 2 πR
2 πR
=
e quindi si può ricavare T:
T=
v=
v
tempo
T
v
2π
Ricordando poi che ω =
, si può anche scrivere T =
, che è un’altra formula utile.
ω
R
T si esprime in secondi ed è sempre uno scalare.
3) La frequenza (ν, “ni”, o anche f): è semplicemente l’inverso del periodo T, e dunque il numero di giri descritti
ogni secondo.
1
ω
e, ricordando la relazione tra T e ω, otteniamo anche ν =
.
ν=
T
2π
Le dimensioni di ν sono [1/secondi], che viene anche detto Hertz (Hz). Per esempio, una frequenza di 10 Hz significa
che il corpo fa 10 giri al secondo (quindi il periodo è T = 0,1 s). Anche ν è ovviamente uno scalare.
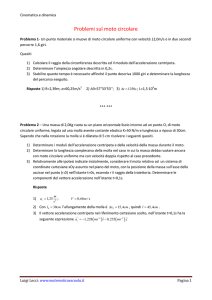
4) L’accelerazione ( a ): come ogni accelerazione che si rispetti, esprime la variazione della velocità al passare del
tempo. Come la velocità, è un vettore, quindi bisogna calcolarne modulo,
v1
direzione e verso. Forse il modo più semplice è quello di considerare il moto
v2
circolare in due istanti successivi t1, t2 (v. figura 2): da t1 a t2 il raggio vettore
x
B
passa da R 1 a R 2 descrivendo un angolo α. Il vettore velocità passa dalla
y
v1
posizione v 1 alla posizione v 2, descrivendo lo stesso angolo α. Per
R2
A
convincersi di questo si riporta su v 2 (cioè in B) il punto di applicazione del
α
v 1 e poi si prolunga quest’ultimo fino al punto H di intersezione con il
vettore
H
raggio OA. Il triangolo OBH è rettangolo (perché v 1 è perpendicolare a OA)
O R1
e quindi l’angolo O B̂ H vale 90° - α. Ma la somma degli angoli x, y e O B̂ H è
180° e y vale 90°, perciò: x + 90° + 90° - α = 180°. Da questo si ha subito x
= α. Tutto questo ragionamento ci permette di dire che quando il punto sulla
Figura B - Posizioni ai tempi t1 , t2 circonferenza ha descritto un cerchio completo, anche il vettore velocità avrà
fatto lo stesso; è dunque legittimo affermare che anche v compie un moto
circolare uniforme, identico a quello dell’oggetto che stiamo studiando. Questo secondo moto è solo una costruzione
geometrica. Però la sua velocità corrisponde all’accelerazione del moto reale: questo perché sappiamo che
l’accelerazione è per la velocità quello che la velocità è per lo spazio, e il secondo moto circolare (quello “fasullo”) ha
come raggio proprio la velocità del primo moto. Quindi la velocità del 2° moto è l’accelerazione del 1°. Con questo in
mente possiamo scrivere la relazione ω = v / R, che per il 2° moto circolare diventa ω = a / v ( i due moti hanno stesso
periodo T, quindi stessa ω). Così giungiamo finalmente alla formula a = ωv = ω2R, che dà l’accelerazione centripeta
(“diretta verso il centro”) del moto circolare uniforme. La direzione è sempre verso il centro perché questo è l’unico
modo per mantenere l’oggetto in moto legato al punto O.
Spesso la formula è scritta a = - ω2R , col segno meno: ciò evidenzia che il vettore a ha sempre verso opposto a R .