UNIVERSITÀ DEGLI STUDI DI TORINO
FACOLTÀ DI SCIENZE MFN
Laurea Magistrale in
Fisica Biomedica
A.A. 2008-2009
RICERCA AUTOMATICA DI NODULI IN
CT POLMONARI
Candidato:
Serena Valzano
Relatore:
Prof.Cristiana Peroni
Corelatore:
Dott. Piergiorgio Cerello
Indice
1 Sistemi Computer Assisted Detection
4
1.1
Storia del CAD . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5
1.2
Funzionamento del CAD . . . . . . . . . . . . . . . . . . . . . . . . .
6
1.2.1
Preprocessamento e Segmentazione . . . . . . . . . . . . . . .
6
1.2.2
Classificazione delle ROI . . . . . . . . . . . . . . . . . . . . .
7
1.2.3
Estrazione delle features dalla ROI . . . . . . . . . . . . . . .
7
1.2.4
Classificazione delle ROI . . . . . . . . . . . . . . . . . . . . .
7
Prestazioni del CAD . . . . . . . . . . . . . . . . . . . . . . . . . . .
10
1.3.1
Curva ROC . . . . . . . . . . . . . . . . . . . . . . . . . . . .
10
1.3.2
Curva FROC . . . . . . . . . . . . . . . . . . . . . . . . . . .
11
Alcuni esempi di CAD . . . . . . . . . . . . . . . . . . . . . . . . . .
12
1.4.1
CAD per il cancro alla mammella . . . . . . . . . . . . . . . .
12
1.4.2
CAD per il cancro al colon . . . . . . . . . . . . . . . . . . .
13
1.3
1.4
2 CAD polmonare
2.1
16
MAGIC-5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
17
2.1.1
Database di MAGIC-5 . . . . . . . . . . . . . . . . . . . . . .
18
2.2
Caratteristiche di un sistema CAD polmonare . . . . . . . . . . . . .
20
2.3
Algortmo di segmentazione . . . . . . . . . . . . . . . . . . . . . . .
21
2.3.1
Region Growing 3D . . . . . . . . . . . . . . . . . . . . . .
22
2.3.2
Wavefront algorithm . . . . . . . . . . . . . . . . . . . . .
23
2.3.3
Ciclo di ottimizzazione della soglia . . . . . . . . . . . .
25
2.3.4
Closing 3D . . . . . . . . . . . . . . . . . . . . . . . . . . . .
26
Identificazione candidati noduli: metodo ROI Hunter . . . . . . . . .
27
2.4.1
VBNA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
27
2.4.2
RG . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
28
Riduzione dei falsi positivi . . . . . . . . . . . . . . . . . . . . . . . .
28
2.5.1
VBNA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
29
2.5.2
RG . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
30
2.4
2.5
2
3 Channeler Ant Model
3.1
3.2
3.3
3.4
33
Gli insetti sociali . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
33
3.1.1
Modellizzazione delle formiche . . . . . . . . . . . . . . .
34
3.1.2
Ottimizzazione del percorso
. . . . . . . . . . . . . . . .
34
Channeler Ant Model . . . . . . . . . . . . . . . . . . . . . . . .
35
3.2.1
Membri della colonia . . . . . . . . . . . . . . . . . . . . . . .
36
3.2.2
Regole di movimento . . . . . . . . . . . . . . . . . . . . . . .
37
3.2.3
Regole di rilascio di feromone . . . . . . . . . . . . . . . . . .
38
3.2.4
Ciclo di vita: riproduzione e morte . . . . . . . . . . . . . . .
39
3.2.5
Comportamenti anomali . . . . . . . . . . . . . . . . . . .
39
3.2.6
Implementazione del modello . . . . . . . . . . . . . . . . . .
40
Analisi del modello . . . . . . . . . . . . . . . . . . . . . . . . . .
42
3.3.1
Immagini artificiali . . . . . . . . . . . . . . . . . . . . . . . .
42
3.3.2
Parametri di ottimizzazione . . . . . . . . . . . . . . . . . . .
43
Osservazioni sull’algoritmo CAM . . . . . . . . . . . . . . . . . . . .
44
3.4.1
47
Segmentazione dell’oggetto . . . . . . . . . . . . . . . . . . .
4 Analisi
49
4.1
Considerazioni iniziali . . . . . . . . . . . . . . . . . . . . . . . . . .
49
4.2
Mappa di feromone . . . . . . . . . . . . . . . . . . . . . . . . . .
51
4.3
Estrazione delle features . . . . . . . . . . . . . . . . . . . . . . .
53
4.4
Analisi della posizione delle ROI
. . . . . . . . . . . . . . . . .
53
4.4.1
Correzione dell’algoritmo . . . . . . . . . . . . . . . . . . . .
56
4.4.2
Match . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
56
4.4.3
ANODE09 . . . . . . . . . . . . . . . . . . . . . . . . . . . .
58
4.4.4
LIDC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
58
4.4.5
GStest . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
58
Classificazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
63
4.5
Bibliografia
64
3
Capitolo 1
Tumore al polmone
Il cancro al polmone rappresenta la prima causa di morte nei paesi industrializzati.
E’ una neoplasia che può colpire sia uomini che donne: i morti per tumore al polmone
sono più di un milione ogni anno e la possibilità di sopravvivenza è bassa rispetto alla
maggior parte di altri tipi di tumori. Il picco d’incidenza maggiore si ha negli uomini
con età compresa tra i 55 e i 65 anni, ma sono sempre più frequenti i casi di tumori
che insorgono intorno ai 35 anni. In Italia è la neoplasia più diffusa, basti pensare
che ogni anno vengono colpite 35000 persone circa (in parte da tumore maligno e in
parte benigno) tra uomini e donne. Il numero di nuovi casi è in crescita costante, e
questo è dovuto ad un precedente aumento dell’industrializzazione, dell’abitudine al
fumo, la presenza di polveri sottili; ciò fa ipotizzare che nei prossimi anni ci sarà un
aumento del numero di tumori polmonari diagnosticati.
1.1
Il polmone
Il polmone è l’organo responsabile della respirazione. Si divide in due parti: destro
e sinitro; entrambi si trovano nella cavità toracica ai lati del cuore e hanno la capicità di contrarsi e rilassarsi seguendo i movimenti della gabbia toracica. Il polmone
destro, più pesante, è diviso in tre parti ( superiore, medio e inferiore ), mentre il
polmone sinitro, più leggero, è diviso solo in due parti (inferiore e superiore). I polmoni sono ricoperti da un tessuto spugnoso ed elastico che si adatta ai movimenti
respiratori; sono separati dal mediastino ed uniti dalla trachea. Il mediastino è una
regione compresa tra lo sterno e le vertebre toraciche, al cui interno si trovano altri organi (timo, cuore, trachea ,bronchi, esofago), oltre a vasi sanguigni, strutture
linfatiche e formazioni nervose. La trachea è un tubo cilindrico sostenuto da anelli cartilaginei; superiormente sfocia nella laringe, inferiormemte, tra la quarta e la
quinta vertebra, si biforca poi in due bronchi primari, uno di destra e uno di sinistra. Ciascun bronco penetra all’interno del suo corrispettivo polmone dando origine
a numerose diramazioni che prendono il nome di bronchioli. Questi a loro volta subiscono varie divisioni, fino a raggiungere, nella parte terminale, delle sacche d’aria
4
1.2 Epidemologia del tumore al polmone
5
chiamate alveoli. Questi sono responsabili della respirazione, ossia dello scambio di
ossigeno e anidride carbonica tra atmosfera e sangue. Le pareti degli alveoli sono
prive di tessuto muscolare, quindi il polmone non può contrarsi ma è costretto a
subire passivamente i movimenti della respirazione. Mentre il compito degli alveoli
è quello della respirazione, il ruolo dei bronchi e delle vie aeree superiori (naso, faringe, laringe e trachea) è quello di protegerre l’organismo da materiali estranei e
gli alveoli da flussi d’aria freddi o secchi. A livello macroscopico, i polmoni sono ricoperti dalla pleura, una membrana sierosa costituita da due foglietti: uno parietale
che riveste tutta la cavità toracica e uno viscerale interno che aderisce alla parete
polmonare esterna. Tra questi due foglietti scorre un liquido, detto liquido pleurico
che consente lo scorrimento tra i due foglietti ed inoltre li mantiene uniti. I polmoni
si trovano in un ambiente umido e per questo motivo sono facilmente attaccabili da
microrganismi; infatti le malattie respiratorie sono spesso dovute ad infezioni virali
o batteriche.
Figura 1.1: Struttura dei polmoni
1.2
Epidemologia del tumore al polmone
Con il termine carcinoma del polmone si fa riferimento ad una categoria diagnostica
che comprende l’insieme di neoplasie maligne che originano dai tessuti epiteliali dei
bronchi e del parenchima polmonare. Il 95% dei tumori maligni è rappresentato dal
carcinoma del polmone mentre altre patologie come sarcomi e linfomi sono in percentuale minore; meno del 5% delle neoplasie polmonari è rappresentato da tumori
benigni o con un basso grado di malignità. Un’ulteriore distinzione si fa tra neoplasie
primitive e secondarie; le prime originano dalle strutture polmonari, le seconde sono rappresentate da metastasi di neoplasie che originano da altri organi come rene,
fegato, mammella ecc. Il carcinoma del polmone è la neoplasia con il maggior tasso
d’incidenza e di mortalità nel mondo, con la massima frequenza negli Stati Uniti
1.3 Cause del tumore al polmone
6
e in Europa. In Italia nell’anno 2004 sono decedute 32840 persone per tumore al
polmone.
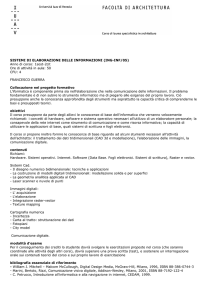
Figura 1.2: Studio dell’incidenza e della mortalitá in Italia tra il 1998-2002
Da uno studio è risultato che tra il 1998 e il 2002 questa malattia è la terza neoplasia diagnosticata per gli uomini, la quarta per le donne; mentre è la prima causa
di morte per gli uomini, la seconda, dopo il cancro alla mammella, per le donne.
Un’importante informazione che ci suggerisce questo studio (osservando la fig ??) è
che confrontando i dati di incidenza con quelli di mortalità per uno stesso luogo, il
carcinoma del polmone ha un bassissimo indice di sopravvivenza sia per gli uomini
che per le donne [1, 2].
1.3
1.3.1
Cause del tumore al polmone
Fumo
Il fumo di tabacco è considerato la causa principale per lo sviluppo del carcinoma
del polmone; da uno studio [3] è risultato responsabile di circa il 90% dei tumori
polmonari mortali nei paesi sviluppati. In particolare, negli Stati Uniti, il fumo è
responsabile dello sviluppo dell’87% di casi di neoplasie polmonare, con un’incidenza
che aumenta considerevolmente se le prime esposizioni avvengono tra i 18 e i 25
1.3.2 Radon
7
anni. Il fumo contiene circa 60 cancerogeni certi, inclusi i radioisotopi provenienti
dal decadimento del radon 1 , il benzopirene. Inoltre la nicotina presente è in grado
di abbassare la risposta immunitaria, diminuendo la capacità di vigilare dei linfociti
T e NK (natural killer). Il fumo non rappresenta solo un fattore di rischio, ma
anche un importante elemento che è in grado di influenzare la prognosi; questo è
dimostrato dal fatto che soggetti non fumatori ma con carcinoma del polmone hanno
una maggiore percentuale di sopravvivenza (circa 5 anni) rispetto ai fumatori.
Dal fumo si possono distinguere due componenti: una mainstream (flusso principale)
e una sidestream (flusso laterale); la prima ad alte temperature è quella generata
da processi di inspirazione attiva, la seconda, a basse temperature, è il risultato
della combustione spontanea (fumo passivo). Recenti studi hanno dimostrato come
quest’ultima (85%) è più nociva rispetto alla prima. All’atto pratico però, data
la notevole diluizione nell’aria che il fumo passivo subisce prima di essere inalato,
l’aumento percentuale di rischio di contrarre patologie a cui è esposto chi la assume
resta inferiore rispetto al fumatore attivo [4].
1.3.2
Radon
Il radon è un gas nobile radioattivo, inodore, incolore ed estramamente volatile;
esso appartiene alla catena di decadimento radioattivo che ha inizio dall’Uranio.
Dal momento che l’uranio è distribuito su tutta la crosta terrestre, anche il radon è
presente ovunque. E’ un gas pericoloso, perché se inalato, può danneggiare i tessuti
dell’apparato respiratorio, e indurre mutazioni a carico del DNA. Dal punto di vista
radioprotezionistico l’interesse maggiore è per il radon in aria; esso viene misurato in
numero di dintegrazioni al secondo in m3 di aria. Esiste sicuramente una correlazione
tra il radon e il rischio di formazione di cancro al polmone: dipende dalla dose,
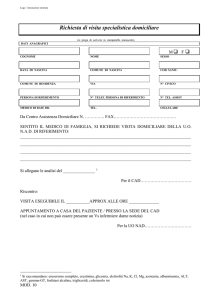
ossia dalla quantità di gas presente [5]. Dalla figura ??, possiamo osservare come il
contributo del radon è di gran lunga maggiore rispetto ad altre sorgenti di radiazioni,
in Italia come nel mondo.
Figura 1.3: Distribuzione di Radon nella crosta terrestre
1
Elemento chimico, rappresentato dal simbolo Rn; è un gas nobile radioattivo, molto pericoloso
per la salute umana, se inalato.
1.3.3 Inquinamento atmosferico
1.3.3
8
Inquinamento atmosferico
Non ci sono ancora dei dati definitivi ma lo smog e l’inquinamento atmosferico, che
sono prodotti dalla combustione dei derivati del petrolio e dalla loro lavorazione (che
comporta l’uso di metalli come nichel e cromo), sono considerati possibili fattori di
richio nella patogenesi del cancro al polmone.
1.3.4
Amianto
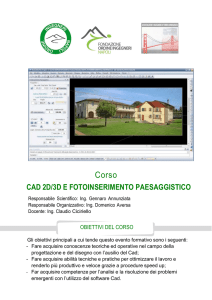
L’amianto ha un ruolo fondamentale, insieme al fumo di tabacco, per lo sviluppo di
carcinoma del polmone. In Italia, la correlazione tra esposizione all’amianto e tumore
al polmone è stata registrata per la prima volta nel 1995; lo studio [6] ha dimostrato
che la sola esposizione all’amianto è in grado di aumentare il rischio di malattia; quindi accoppiando l’esposizione all’amianto e il fumo il rischio di ammalarsi aumenta
maggiormente.
Figura 1.4: Distribuzione di Amianto nella crosta terrestre
1.3.5
Virus
La capacità oncogena dei virus è stata dimostrata nel modello animale, benché anche
recenti studi [7] suggeriscono il ruolo importante del papillomavirus nella patogenesi
del carcinoma del polmone nell’uomo. Questi virus possono alterare il ciclo cellulare
e bloccare i processi di apoptosi (suicidio delle cellule), promuovendo un anomalo
controllo della respirazione e sviluppo di neoplasie.
1.3.6
Predisposizione genetica
Esiste una predisposizione genetica per il tumore al polmone; nella maggior parte dei
casi, la malattia è causata da alterazioni (mutazioni) del DNA che si sviluppano casualmente nel corso della vita a livello delle cellule del nostro organismo. Una piccola
parte di queste anomalie può essere ereditata sin dalla nascita: con il passare degli
anni si possono accumulare altre mutazioni che determinano un maggiore rischio,
che gli specialisti chiamano predisposizione poligenica. In Italia oggi esistono istituti
di ricerca con competenze specifiche verso la decifrazione del genoma umano; per
esempio l’Istituto Nazionale dei Tumori e l’Istituto Mario Negri di Milano stanno
1.4 Tipi di tumori al polmone
9
effettuando uno studio multicentrico [8] per evidenziare il ruolo della predisposizione genetica al tumore al polmone. La ricerca consiste nell’analisi di pazienti non
fumatori che hanno sviluppato questo tipo di neoplasia con età inferiore ai 60 anni
e di soggetti sani ( in genere parenti di primo grado). Per tali studi sono necessari
numerosi campioni , perché l’obiettivo è quello di identificare fattori genetici che
siano poi adattabili sull’intera popolazione. I risultati preliminari dei test genetici
sui familiari dei pazienti malati rivelano l’esistenza di una mutazione del DNA in
grado di innescare una neoplasia. La formazione di qualsiasi tumore si ha quando in
media sono presenti 3 o 7 mutazioni; questo autorizza a pensare che la malattia si
possa presentare con certezza ed induce ad una maggiore cautela e prevenzione. Le
persone a rischio possono adottare uno stile di vita corretto, evitando di esporsi a
fattori di rischio (come il fumo sia attivo che passivo), e sottoponendosi a controlli
periodici. L’identificazione delle vie biochimiche responsabili della suscettibilità o
della resistenza al tumore al polmone consentirà non solo di allestire kit diagnostici
per la valutazione del rischio, ma anche di sviluppare nuove terapie personalizzate
con farmaci basati su specifici bersagli molecolari.
1.4
Tipi di tumori al polmone
L’esposizione a fattori di rischio induce modifiche delle cellule dell’epitelio dei bronchi, soprattutto quelli del primo, secondo e terzo ordine dove originano i tumori [9].
Di questi la maggioranza (90-95%) sono considerati tumori maligni di origine epiteliale (detti carcinomi), mentre solo il 5% sono carcinoidi bronchiali e il 2-5% tumori
mesenchimali .
L’Organizzazione Mondiale della Sanità classifica i tumori polmonari in quattro
tipi istologici. Ma ai fini terapeutici sono state invece individuate due grandi categorie: tumore a piccole cellule (SCLC) e tumori non a piccole cellule (NSCLC).
Quest’ultimi si possono, a loro volta, suddividere in sottogruppi come: carcinoma
a cellule squamose o carcinoma epidermoide, adenocarcinoma polmonare, carcinoma bronchioalveolare e altri. Nella tabella 1.1 [10, 11] si può osservare la frequenza
dell’insorgere dei vari tipi di tumori polmonari.
1.4.1
Carcinoma squamocellulare
Il carcinoma squamocellulare è caratterizzato dalla presenza di cheratinizzazione
(formazione di uno strato che da all’epidermide una funzione di difesa contro agenti
esterni) ben visibile per la presenza di elementi cellulari fusiformi, prive di nuclei
(vedi fig.??). La combinazione e l’intensa proliferazione di questi elementi intorno ad
un punto porta alla formazione di perle cornee, identificabili come zone concentriche.
Nella figura ?? è possibile osservare la presenza di spine che fuoriescono dalla membrana cellulare e formano ponti tra le cellule. Si tratta di desmosomi che con la
1.4.1 Carcinoma squamocellulare
Figura 1.5: Suddivisione dei tumori polmonari per tipi istologici
Figura 1.6: Immagine di carcinoma squamocellulare
10
1.4.2 Adenocarcinoma
11
cheratinizzazione dimostrano la conversione dell’epitelio cilindrico bronchiale in un
epitelio molto simile a quello della cute. La presenza di spine intracellulari è necessaria per lo studio di lesioni bronchiali sospette. La presenza di perle cornee, spine
ed elementi squamosi descrivono una forma di neoplasia ben differenziata; viceversa,
l’assenza di perle cornee, la presenza di figure miotiche atipiche
2
e di elementi cel-
lulari giganti ed immaturi descrivono un tipo di neoplasia scarsamente differenziata
con un grado maggiore d’invasività.
1.4.2
Adenocarcinoma
L’adenocarcinoma è una neoplasia di origine epiteliale in cui si puó osservare un certo
grado di differenzazione verso l’epitelio ghiandolare, caratterizzato dalla presenza di
strutture acinose e papillari e dalla produzione di mucina 3 . Nell’immagine ?? le
cellule che formano la struttura ghiandolare assumono una colorazione molto chiara
per la presenza di mucina nel citosol. In questo caso si parla di adenocarcinoma a
cellule chiare .
Figura 1.7: Immagine di adenocarcinoma
Nella rappresentazione ?? si focalizza l’attenzione sulla formazione di strutture
ghiandolari che dimostrano la differenzazione del tumore; man mano che questo
diventa sempre più indifferenziato alle strutture ghiandolari si sostituiscono strutture papillari, che danno al tessuto un apetto più compatto. Con la progressiva perdita
dellla differenzazione il tumore assume un aspetto più solido, con elementi cellulari
atipici, difficili da caratterizzare.
1.4.3
Carcinoma bronchioalveolare
Il carcinoma bronchioalveolare è considerato una variante dell’adenocarcinoma, anche se ha una caratterizzazione anatomico - patologica differente.
Si distingue in muciparo e non muciparo; la differenza consiste nella forma cellulare
e nell’evoluzione. Il tipo muciparo è costituito da cellule cilindriche e tende a dif2
3
Cellule che si riproducono per divisione
La mucina è una glicoproteina presente nei secreti mucosi del tratto respiratori e gastro-
intestinale; la glicosilazione della mucina aumenta la viscosità e questo crea una specie di velo
di protezione sull’epitelio considerato. La viscosità tende ad umentare perché la parte idrofila della
glicoproteina, attira molta acqua e aumenta le interazioni con essa.
1.4.4 Carcinoma a grandi cellule
12
Figura 1.8: Immagine di carcinoma bronchialveolare
fondersi per via aerogena; il tipo non muciparo è costituito da cellule che tendono a
formare noduli confinati e possono essere asportati chirurgicamente.
1.4.4
Carcinoma a grandi cellule
Il carcinoma a grandi cellule, definisce un tipo di neoplasia polmonare che non è
identificabile nei carcinomi squamocellulari e negli adenocarcinomi. Come si può
osservare dalla figura ??, questi tumori sono costituiti da elementi pleomorfi ( batteri
che modificano la propria morfologia ) con nuclei di dimensioni variabili dai quali si
possono distinguere i nucleoli.
Figura 1.9: Immagine di carcinoma a grandi cellule
1.4.5
Carcinoma a piccole cellule
Il carcinoma a piccole cellule rappresenta l’estremo di una categoria di neoplasie che
ha origine da cellule neuroendocrine.
Figura 1.10: Immagine di carcinoma a piccole cellule
1.5 Classificazione TNM
13
Questo tipo di tumore è caratterizzato da cellule tondeggianti (come si può osservare
dalla figura ?? ) con scarso citoplasma e membrana cellulare ben definita; queste
cellule si organizzano a formare una struttura molto compatta, con zone di necrosi
e con un fattore che dimostra il basso grado di differenziabilitò e l’elevata malignità,
propriamente detta conta miotica.
1.5
Classificazione TNM
Per la classificazione del tumore al polmone, o di altre neoplasie, si usa il sistema
TNM; nella figura riportata di seguito si può osservare la classificazione (fig.??):
Figura 1.11: Classificazione del tumore polmonare sul sistema TNM
Il parametro T indica la dimensione del tumore primitivo, può valere 1,2,3,4 (corrispondenti a dimensione crescente), può essere anche in situ, talmente piccolo da non
intaccare linfonodi o altri organi; il paramentro N indica la posizione di eventuali
linfonodi presenti, e può valere 0 (se sono del tutto indenni) o 1,2,3 (indicando la
gravità del tumore in ordine crescente); il parametro M indica la presenza di metastasi a distanza, può valere 0 (nessuna metastasi) o 1 (presenza di metastasi).
I tumori con metastasi (fascia colore bordeaux), qualunque sia la loro dimensione
e indipendentemente dalla presenza o meno di linfonodi, sono considerati casi non
operabili, con un livello di sopravvivenza molto bassa [12].
1.6
Terapia
La terapia dipende principalmente dalla natura cellulare del tumore, dallo stadio
della malattia e dalle condizioni del paziente. I trattamenti si basano, normalmente,
sulla chirurgia, chemioterapia e radioterapia. Nel caso di carcinoma a piccole cellule, la malattia è più aggressiva e per questo motivo si ricorre a chemioterapia e
radioterapia. La chemioterapia si basa sull’utilizzo di sostanze chimiche e farmaci in
grado di uccidere le cellule; è usata sia per la cura di malattie infettive, in cui vengono uccisi gli agenti patogeni, sia per tumori, in cui vengono uccise cellule tumorali.
La maggior parte dei chemioterapici tumorali, uccide le cellule tumorali interferendo
con la sintesi del DNA e quindi con la capacità di una cellula di crescere e riprodursi.
1.7 Prevenzione e screening
14
La radioterapia è un tipo di terapia oncologica basata sull’uso di radiazioni ad alta
energia (raggi X,α, β e γ), in grado di distruggere le cellule tumorali. Le radiazioni
danneggiano il DNA, impedendo la riproduzione delle cellule e causandone la morte;
agiscono soprattutto su cellule tumorali perché esse si riproducono più attivamente,
ma anche su quelle normali che hanno una velocità di riproduzione più elevata. Le
radiazioni possono provenire dall’esterno del corpo, per esempio da acceleratori di
elettroni, oppure da materiali radioattivi che si collocano direttamente all’interno
del tumore, come i mezzi di contrasto.
Questa terapie sono generalmente usate per ridurre le dimensioni del tumore prima dell’intervento chirurgico oppure per eliminare cellule tumorali rimaste dopo
l’intervento.
Negli ultimi anni è stata introdotta una forma di radioterapia che, invece di utilizzare
raggi X, utilizza fasci di particelle pesanti, detti adroni, tra i quali gli ioni carbonio
ed i protoni. Grazie a particolari proprietà fisiche di queste particelle, l’adroterapia
è un trattamento puù preciso, perché consente di colpire il tumore in modo selettivo
e quindi salvare i tessuti sani che lo circondano; esso è anche più efficace perché è in
grado di uccidere cellule di tumori che sono particolarmente resistenti alle radiazioni
convenzionali. L’adroterapia è un trattamento che, per ora, viene sviluppato solo in
pochi centri nel mondo, perché richiede l’ultilizzo di macchinari molto sofisticati e
costosi. Attualmente in Italia, l’unico centro in grado di sviluppare protonoterapia
(per patologie oculari) si trova a Catania (centro CATANA, presso i Laboratori Nazionali del Sud dell’Istututo Nazionale di Fisca Nucleare) dove medici e fisici sanitari
effettuano dei trattamenti circa ogni 5 settimane. Anche a Pavia è stato completato
il primo centro di adroterapia, il CNAO (Centro Nazionale di Adroterapia Oncologica), che può trattare pazienti sia con protoni, sia con ioni, in particolare, lo ione
carbonio.
1.7
Prevenzione e screening
Per una buona prevenzione del cancro al polmone, considerando i fattori di rischio,
la prima cosa da fare sarebbe eliminare il fumo (per i soggetti fumatori) o evitare l’esposizione ad esso (per i soggetti non fumatori); per il radon, l’amianto e
l’inquinamento atmosferico, altri importanti fattori di rischio, sarebbe necessario il
controllo dell’ambiente in cui viviamo, da parte dell’ ARPA (Agenzie Regionali per
la Protezione Ambientale); questa sarebbe un tipo di prevenzione primaria.
La prevenzione secondaria coincide con lo screening: un programma di controllo, organizzato su larga scala, in cui un certo numero di persone che appartengono ad una
categoria a rischio vengono sottoposti ad un test diagnostico, anche se non hanno
nessun tipo di disturbo; lo scopo è quello di scoprire la malattia molto precocemente, in fase asintomatica, per ridurre il grado di mortalità. Gli esami a cui vengono
1.7 Prevenzione e screening
15
sottoposti i pazienti, per questo tipo di test, sono la semplice radiografia del torace,la Tomografia Assiale Computerizzata a spirale (TAC) o la Positron Emission
Tomography (PET).
La Tomografia Assiale Computerizzata è l’esame che viene effettuato per la diagnosi
di tumori, perché permette di ottenere immagini di organi interni come se fossero
esaminati a fette, con uno spessore di 0.5 ÷ 5mm; la differenza di una TAC tradizionale rispetto ad una TAC a spirale è che lo strumento ruota attorno al paziente,
come se lo avvolgesse in una spirale.
La Positron Emission Tomography (PET) utilizza una camera particolare per registrare i raggi gamma che si formano dall’urto (fenomeno propriamente detto annichilazione 4 ) di un elettrone con un positrone; principalmente questa tecnica serve
per misurare il metabolismo cellulare delle cellule tumorali, permettendo di valutare
il grado di aggressività del tumore, la presenza e la distribuione di metastasi a distanza, l’effetto dei trattamenti chemio o radioterapici (o di entrambi se il paziente
è stato sottposto ad entrambe le terapie) e la possibilità di riformazione del tumore
o di morte della cellula cancerogena.
Negli ultimi anni sono stati pubblicati importanti studi su questo tipo di prevenzione; il primo studio ha dimostrato che la TAC a spirale è lo strumento più adatto a
identificare precocemente alterazioni del tessuto polmonare; alla fine è stato evidenziato un aumento della sopravvivenza [13]. Il secondo studio ha dimostrato che lo
screening con la TAC a spirale non diminuisce la mortalità ma prolunga la sopravvivenza, cioè la durata della vita dal momento della diagnosi(che viene anticipata)
alla morte [14].
Alla luce di questi risultati, che non sono conclusivi, si stanno effettuando nuove
ricerca che daranno un risultato sicuro.
In Italia nel 2007 è stato pubblicato uno studio [15] , condotto dall’Istituto Europeo
di Oncologia di Milano sul programma Cosmos (Continuos Observation of Smoker
Subjects), uno screening su 5200 soggetti fumatori, utilizzando la TAC a spirale e la
PET che facilitano il procedimento diagnostico di noduli in modo non invasivo. Nei
primi due anni di ricerca sono stati identificati 89 tumori polmonari molto piccoli
(dimensione media è stata di 14 millimetri). Il 90% dei tumori scoperti è risultato
operabile. Globalmente il 70% si trovavano nello stadio con migliore prognosi, con
un livello di sopravvivenza tra il 80% e il 90%. I risultati ottenuti finora portano
alla conclusione che nonostante lo screening non raggiunga il 100% dei tumori in
fase iniziale, riduce però del 90% quelli in stadio avanzato, i più pericolosi, che sono
la maggior parte dei tumori diagnosticati senza controllo. Questo studio ha ancora
3 anni in cui ci si propone di ottenere un calo significativo del numero di tumori
riscontrati e uno screening di massa, ovvero che coinvolgerà 20mila soggetti entro
uno o due anni.
4 + −
e e → 2γ con Eγ = 512keV , se e+ è a riposo
1.7 Prevenzione e screening
16
Figura 1.12: Risultati dello studio dell’Istituto Europeo di Oncologia di Milano
Come si può vedere dai grafici (figura ??), lo screening aumenta le diagnosi del 30%
(da 33 casi attesi si passa a 42 riconosciuti).
Si può quindi concludere che, con l’avvento delle nuove tecnologie e dei nuovi sistemi
di diagnosi computerizzata, ci si aspettano dei risultati ancora più sorprendenti, che
migliorino il campo della diagnostica.
Capitolo 2
Sistemi Computer Assisted
Detection
Un sistema Computer Assisted Detection (CAD) è un sistema per la rivelazione
automatizzata di strutture patologiche in immagini medico-diagnosticge. Ricopre
un ruole importante, come strumento di supporto alla diagnosi, collaborando con il
medico nella distinzione tra strutture anatomiche e lesioni tumorali.
Attraverso l’integrazione tra il giudizio umano e quello del mezzo informatico, il
radiologo può prevenire ad una maggiore accuratezza della diagnosi, riuscendo a
rilevare anche noduli di piccole dimensioni, che possono facilmente sfuggire all’occhio
umano.
CAD è l’acronimo di Computer Assisted Detection e non Computer Aided Diagnosis:
il sistema, infatti, non ha i requisiti sufficienti per effettuare una vera e propria diagnosi, ovvero discernere se un paziente è sano o malato, ma permette semplicement
di localizzare le regioni sospette, da sottoporre all’attenzione del medico.
Sono sistemi che ricevono in ingresso esami diagnostici (come mammografia, CT
polmonari e, ultimamente anche coloscopie); dopo averle processate in più stadi
in maniera più o meno automatizzata, formiscono in uscita una lista di regioni
potenzialmente patologiche.
Un sistema CAD può rivestire un ruolo sostanziale i supporto in programmi di
screening di massa della popolazione ad alto rischio o nella diagnosi clinica. In
particolare può essere utilizzato come:
• primo lettore, in caso di screening della popolazione. E’ un vantaggio per il radiologo perché in grado di analizzare automaticamente immagini e focalizzare
l’attenzione del medico su particolari scansioni che più probabilmente evidenziano patologie, garantendo la possibilità di un intervento puù tempestico ed
efficace;
• secondo lettore, nella tradizionale pratica clinica, fornendo al medico, una seconda opinione nella rilevazione di neoplasie. In questo modo garantisce uno
17
2.1 Storia del CAD
18
standard più elevato, divenendo un utile supporto per la definizione di una
diagnosi più accurata e la conseguente applicazione di interventi terapeutici
appropriati.
E’ in grado di contrastare errori medici legati all’insufficente esperienza, alla stanchezza o all’aspetto gravoso e ripetitivo del lavoro di analisi. E’ frequente, infatti,
una classificazione non corretta a causa dello scarso contrasto tra tessuti sani e patologici e la similarità di caratteristiche anatomiche-patologiche. Da qui l’importanza
della doppia lettura, fornita dal CAD, che accosta all’esperienza del medico accosta
una lettura più rapida e attenta, meno legata alla soggetività.
2.1
Storia del CAD
Il campo della medicina che ha ricevuto il massimo contributo dall’introduzione di
sistemi di diagnosi computerizzata è la radiologia. Sino a 20-25 anni fa un radiologo aveva a disposizione le lastre (foto in negativo degli organi) che poneva su uno
strumento, chiamato diafanoscopio, su cui osservava attentamente i dettagli dell’immagine alla ricerca di particolari anomalie, e ne ricavava un referto. Con l’avvento
della TAC (Tomografia Assiale Computerizzata), il numero di immagini da analizzare aumentò notevolmente e di conseguenza aumentarono i tempi di refertazione. Con
il passare degli anni il contesto clinico cambiò; in certi settori oncologici si scoprı̀
il valore della diagnosi precoce implementate attraverso i programmi di screening.
Negli anni novanta iniziò la diffusione su larga scala di strumenti che producono
direttamente un’immagine digitale; il numero delle immagini crebbe notevolmente.
Un post-processing del radiologo, di un esame complesso, come la colonoscopia virtuale o CT, può richiedere anche un’ora. La visione delle immagini al computer
richiede più lavoro al radiologo, perché alcuni dettagli, come un nodulo di 1 millimetro, possono sfuggire, e questo è uno dei limiti dell’occhio umano. E’ in questo
scenario che si introducono i sistemi di diagnosi computerizzata, che funzionano come un secondo osservatore che non ha nessun legame con l’esperienza e la sensibilità
ma direttamente con la struttura matematica e anatomica dell’immagine. I sistemi
CAD utilizzano algoritmi per acquisire, elaborare e classificare immagini tramite reti
neurali. E’ utile distinguere tra:
• Rivelazione computerizzata in cui il computer assiste il radiologo nell’individuare un’anomalia, per esempio nel caso dello screening mammografico (detection);
• Diagnosi computerizzata in cui il computer assiste il radiologo nel caratterizzare, in una classe patologica, un’anomalia già individuata, come ad esempio
l’identificazione di una lesione come benigna o maligna (caratterizzazione).
2.2 Funzionamento del CAD
19
I sistemi CAD attualmente trovano applicazioni commerciali principalmente nella
rilevazione e diagnosi del cancro della mammella e del colon.
2.2
Funzionamento del CAD
Un sistema CAD è costituito semplicemente (come si può vedere dall’immagine 4.21
) da un computer sul quale vengono analizzate le immagini. Le fasi principali del
funzionamento di un CAD sono:
• Preprocessamento dell’immagine: riduzione del rumore;
• Segmentazione;
• Individuazione delle Region Of Interest (ROI) candidate a contenere il tessuto
patologico;
• estrazioni delle features (parametri caratteristici) dalle ROI;
• Classificazione delle ROI in tessuto probabilmente sano o probabilmente malato, in base al valore delle features.
Figura 2.1: Struttura di una stazione CAD
2.2.1
Preprocessamento e Segmentazione
Sono stadi fondamentali per l’analisi successiva delle immagini. Il preprocessamento è
finalizzato alla pulizia dell’immagine dal rumore; la segmentazione delimita il volume
dell’organo che successivamente viene sottoposta alla ricerca delle patologie. Questo
processo oltre ad abbreviare il tempo di elaborazione degli stadi successivi, riduce
il numero di falsi positivi, portando l’algoritmo di ricerca delle neoplasie ad operare
solo sul tessuto d’interesse.
2.2.2 Classificazione delle ROI
2.2.2
20
Classificazione delle ROI
Questa fase è finalizzata alla ricerca delle zone potenzialmente malate, ovvero zone
che, per le loro caratteristiche morfologiche e particolare conformazione anatomica,
potrebbe presentare parologie. Questa fase comporta l’eslusione delel regini sane,
che non saranno oggetto di ulteriori analisi.
2.2.3
Estrazione delle features dalla ROI
L’estrazione di quantità, dette features (parametri caratteristici) fornisce attributi
utili a caratterizzare in maniera peculiare il contenuto di una determinata ROI,
permettendo al successivo stadio di classificazione di discernere tra pattern malati e
sani. La scelta opportuna delle features è fondamentale per il corretto funzionamento
del CAD e la conseguente accuratezza diagnostica. Le features da adottare, variano
in relazione alla patologia indagata e dall’organo in esame: ad esempio, nel caso
specifico di noduli polmonari è fondamentale tener conto della loro forma.
Accanto a dimensione, densità, posizione e regolarità del bordo, è importante l’eccentricità,
parametro indicativo dell’allungamento di una regione. Una forte eccentricità è, spesso, indicativa dell’assenza di patologie, data la forma compatta e sferica e irregolare
di molte lesioni.
E’ importante minimizzare il numero delle features necessarie per distinguere le
lesioni tumorali dalle normali strutture anatomiche.
2.2.4
Classificazione delle ROI
Sulla base dell’analisi delle features, e con l’ausilio di reti neurali, distingue le regioni
di interesse in sane e malate. Per questa fase si ricorre all’impiego di reti neurali o
di altri classificatori che vengono addestrati mediante l’utilizzo di set di immagini
di cui non si conosce lo stati di normalità patologica. In seguito all’addestramento,
i classificatori divengono in grado di analizare le immagini, successivamente loro
formite, applicando e generalizzando quanto acquisito.
La classificazione può essere:
• supervisionata, se l’insieme delle classi è definito a priori, e il classificatore
stabilice a quale di queste appartiene ciascun pattern (mediante analisi delle
features;
• non supervisionata, se è il classificatore a dover individuare le classi presenti
nei dati.
La classificazione supervisionata è basata, fondamentalmente, sull’analisi delle densità di probabilità (stimate o note a priori ) dei valori delle features, per le diverse
classi, determinando quella più probabile.
Una classificazione supervisionata è caratterizzata da una fase di addestamento
2.2.4 Classificazione delle ROI
21
(training), per la quale si utilizza un set significativo di campioni di classe nota. E’ fondamentale, per il corretto funzionamento dell’intero sistema, che questo
set sia costituito da un numero sufficiente di campioni rappresentativi di tutte le
classi.
Analogamente per la fase di verifica (validation) del metodo di riconoscimento e
il controllo della generalizzazione dei risultati, ci si avvale di un piccolo insieme
(validation-set) di campioni di classe nota, di caratteristiche analoghe ai precedenti.
Infine, per esaminare del metodo (testing) su esempi reali e valutarne i possibili
errori è fornito al classificatore un set di test le cui classi non sono note.
In un metodo supervisionato, ciascun campione (pattern) sarà rappresentato da un
vettore di features. L’insieme di questi vettori degli oggetti di una classe è detto
cluster. Ogni oggetto avrà un solo vettore di features, per cui esso corrisponderà ad
un punto nello spazio delle features, e ad ogni cluster sarà associata la distrubuzione
dei punti corrispondenti a tutti gli oggetti di una classe nello spazio medesimo. Le
classi possono essere:
• separabili, se esiste una curva
1
(chiusa o aperta), che percorrendola in una
direzione qualsiasi, tutti e soli gli elementi si trovano ad una lato della curva
(vedi figura 1.2a,c);
• non separabili, se quanto detto prima non accade (vedi figura 1.2 b).
Figura 2.2: Esempio di classi: a,c) separabili; b) non separabili.
Tra i più significativi metodi di classificzione correntemente conosciuti risalta il luogo
chiave assunto dalle reti neuronali (o neurali) artificiali, cosı̀ denominate perchè
basate sulla simulazione, sia pure grandemente semplificata, del funzionamento di
un neurone celebrale nel corso delle attività tipiche del cervello, quali percezioni di
immagini, riconoscimento di forme, ecc.
Una rete neurale rappresenta, essenzialmente, un modello biofisico-informatico di
elaborazione delle informazioni. L’approccio di questi sistemi rispecchia, a livello
concettuale, la complessa struttura organizzativa delle cellule neuronali fittamente
interconnesse e tali da variare la loro configurazione in risposta agli stimoli esterni.
Una rete neurale è composta da un certo numero di nodi, o neuroni, di ingrasso,
costituenti le unità di elaborazione, collegati a numerosi nodi interni, organizzati
in più livelli (strati). Ciascun nodo d’ingresso riceve i segnali esterni e li elabora,
trasmettendo poi il risultato ai nodi successivi ai quali è connesso.
1
Nello spazio a più dimensioni si parlerà di superfici e ipersuperfici
2.2.4 Classificazione delle ROI
22
Figura 2.3: Esempio di neurone artificiale
Ad ogni collegamento interneuronale è associato un valore (peso), dal quale dipende
il comportamento della rete. Ogni neurone è caratterizzato da un stato di attivazione, determinato dai valori degli ingressi e dai pesi delle connessioni corrispondenti
tramite una funzione di attivazione.
Ogni nodo può essere concettualmente interpretato come un circuito costituito da
un sommatore e un filtro. Il sommatore effettua una somma pesata degli input s1 ,
s2 ,...., sn (segnali di ingresso, o output dei nueroni precedenti), e fornisce il risultato
della somma Pi come input del filtro. Il filtro è costituito da una funzione che, sulla
base del valore di Pi , decide il valore di uscita Si .
Tipicamente una rete è formata da tre strati di neuroni:
• strato di ingresso, finalizzato alla trattazione dei segnali di ingresso in modo
tale da adeguarli alle richieste dei neuroni;
• strato nascosto, finalizzato all’elaborazione del segnale;
• strato di uscita, raccoglie i risultati e li adatta alle richieste del blocco successivo della rete.
Queste reti artificiali possono essere anche molto complesse e coinvolgere migliaia di
neuroni e decide di migliaia di connessioni.
Figura 2.4: Esempio di neurone multistrato
2.3 Prestazioni del CAD
2.3
23
Prestazioni del CAD
Data l’importanza di un sistema CAD in termini di screening o come strumento di
supporto nella tradizionale pratica clinica, è essenziale riuscire a pervenire ad alti
livelli di qualità che ne garantiscono la funzionalità. Ad influire sulle prestazioni del
sistema informatico intervengono due importanti fattori: sensibilità e specificità.
Per sensibilità si intende il rapporto tra il numero di ROI in cui è stata, correttamente, riscontrata una patologia tumorale (NCAD ) e il numero totale di lesioni
in cui la patologia tumorale è certa,per esempio tramite la biopsia (Ntot ); questo
parametro, in altre aprole, indica l’efficenza del sistema:
NCAD
(2.1)
Ntot
Per specificità si intende il rapporto tra il numero di ROI classificate come sane
=
e il numero totale di ROI, fornite dallo stato di preprocessamento, in cui è certa
l’assenza di patologie tumorali:
Sp =
NCADnegative
Ntotnegative
(2.2)
Queste due grandezze sono fra loro indipendenti e, pertanto, può essere studiata la
loro correlazione. Alcune volte possono essere utilizzate anche grandezze che derivano
da quelle fondamentali: in particolare, al posto della specificità si può considerare
(1-Sp) che corrisponde alla frazione di falsi positivi:
1 − Sp =
(Ntotnegative − NCADnegative
Ntotnegative
(2.3)
Ad un sistema CAD si chiede:
• alta sensibilità in modo da rilevare tutte le possibili lesioni garantendo la
possibilità di un intervento tempestivo;
• alta specificità che assicuri un numero minimo di falsi positivi, ovvero escluda
la malattia dove realmente esistente. Questo per evitare allarmismi inutili e
dispendiosi approfondimenti diagnostici.
Questi parametri possono subire un notevol incremento percentuale nel caso in cui
la lettura delle immgini venga effettuata da più radiologi in maniera indipendente.
L’affiancamento al radiologo di un sistema di diagnosi computerizzata è efficace solo
se questo sistema è caratterizzato da un’alta efficenza nella classificazione.
2.3.1
Curva ROC
La curva ROC (Receiver Operating Chatacteristics) è il grafico della valutazione
dell’efficenza del sistema CAD; sul diagramma vengono riportati (come possiamo
2.3.2 Curva FROC
24
vedere dalla figura 1.5) i valori di (1-Specificità) sull’asse delle ascisse e quelli di
sensibilità sulle ordinate; i valori di questi due parametri si spostano con il variare
della soglia, che è scelta in modo da soddisfare le diverse esigenze diagnostiche.
Figura 2.5: Esempio di curva ROC
La linea diagonale rappresenta le prestazioni di un sistema senza alcuna capacità di
classificare; l’accuratezza aumenta se ci si avvicina verso l’angolo in alto a sinistra,
mentre il valore dell’area sotto la curva è l’indicatore delle prestazioni complessive
del sistema (un’area con valore pari a 1 indica un test perfetto, 0.5 un test casuale).
2.3.2
Curva FROC
L’analisi della curva ROC non basta per valutare le prestazione del sistema diagnostico, viene introdotta un’altra curva, detta FROC (Free Response Operating
Characteristics) in cui la sensibilità del sistema è correlata al numero dei falsi posotivi per paziente o per un seti di dati. Consentono di stabilire il punto operativi di
un sistema CAD, che è in genere il miglior compromeso tra sensibilità e specificità. I
valori di specificità e sensibilità al punto operativo servono anche come criterio di valitazione dei sistemi CAD e consentono, entro certi limiti, un confronto tra le diverse
tecnologie. Come si può vedere dalla figura 1.6 , questa curva riporta sulle ascisse
il numero medio di falsi positivi per immagine, ottenuti dall’analisi del campione, e
sulle ordinate la sensibilità.
Questa curva è utile per confrontare direttamente il numero di falsi positivi ad un
dato valore di sensibilità; infatti mentre la specificità dipende dalle prestazioni dell’algoritmo di preprocessamento che individua da regioni di interesse da classificare,
il numero FP/image è un indicatore assoluto. Un algoritmo preprocessamento molto
selettivo rende più difficile la fase di classificazione, portando a valori di specificità
relativamente inferiori; al contrario, un preprocessamento poco selettivo facilita la
2.4 Alcuni esempi di CAD
25
Figura 2.6: Esempio di curva FROC
classificazione ed il raggungimento di alti valori di specificità che non necessariamente
corrispondono ad un valore ottimale (cioè minimo) di FP/image.
Le prestazioni dell’algoritmo saranno definite in termini di sensibilità e FP/image
al termine della fase di preprocessamento e delle curve ROC e FROC ottenute nella
fase di classificazione delle regioni di interesse.
2.4
Alcuni esempi di CAD
Attualmente i sistemi CAD che sono stati sviluppati e sono disponibili sul mercato,
riguardano principalmente il tumore alla mammella e al colon.
2.4.1
CAD per il cancro alla mammella
I sistemi CAD sono usati da un numero crescente di radiologi come ausilio nel refertare una mammografia.. Di seguito si riportano alcuni esempi di CAD mammografici:
• ImageChecker della R2 Technology è la prima applicazione commerciale applicata ad immagini radiologiche basata sull’uso di reti neurali. Nata da accordi
con la General Eletric (GE) finalizzati alla realizzazione di un mammografo
digitale con il supporto del CAD, nel 1998 è stato approvato dalla FDA (Food
and Drugs Admnistration). Per quanto riguarda le prestazioni, l’ImageChecker garantisce una sensibilità pari al 98,5% per le microcalcficazioni e dell’86%
per la rilevazione delle masse. Utilizza uno scanner per l’acquisizione di immagini con una risoluzione spaziale di 50µm ed una profondità di 12bit;inoltre
il sistema permette l’archiviazione delle immagini digitalizzate e dei risultati
del CAD in PACS (Picture Archiving and Communications System) tramite
DICOM (Digital Imaging Cominucations in Medicine) e HL7 (Healty Level 7),
che sono dei protocolli standard di comunicazione in ambiente sanitario [16].
2.4.2 CAD per il cancro al colon
26
• IMM della CADVision Medical Technologies LTD. è di produzione israeliana.
La CADVision lo ha presentato nel 2002 ricevendo per il suo software il marchio CE (European regulatory approval) e attende di ottenere la certificazione
FDA. Il sistema offre stumenti per migliorare la visualizzazione dell’immagine
ed evidenziare i dettagli caratteristici delle lesioni, auto-detection di quest’ultime e una classificazione e quantificazione del grado di sospetto delle lesioni.
Il CAD IMM, usando particolari algoritmi, valuta le strutture presenti nella
mammella marcando quelle sospette ed effettuando contemporaneamente una
classificazione delle anomalie, ordinandole in base al loro grado di malignità.
L’attuale validazione clinica del sistema è stata fatta su un database di 541
lesioni (309 maligne, 232 benigne) refertati da 3 radiologi ed ha fornito una
sensibilità tra l’85% e il 99% e una specificità del 72%.
• Second Look [18] è un sistema canadese prodotto dalla CADx Medical System, approvato da parte della FDA nel 2002 per l’uso nei programmi di screening mammografico su pellicola e per la mammografia diagnostica. Questo
CAD opera in tre passi: prima digitalizza le mammografie, poi una rete neurale le analizza per produrre alla fine un output stampato, dove sono evidenziate le regioni di interesse. Per la ricerca delle microcalcificazioni vengono
sfruttate le trasformate wavelet 2 , mentre per le masse si utilizza un filto con
differenze gaussiane. Alla fine dell’analisi si ha uno stampato in cui un indicatore ovale indica le lesioni massive, mentre uno rettangolare per i cluster di
microcalcificazioni.
• MAMMEX TR realizzato dalla Scanis, in collaborazione con le Università
della California e di Stanford è stato presentato nel 2002 ed ha ottenuto l’approvazione della FDA nel 2007. Per la digitalizzazione e le analisi delle lastre
viene usato uno scanner con risoluzione spaziale di 45µm e 12bit di range
dinamico. A differenza degli altri sistemi CAD, non utilizza reti neurali ma
algoritmi basati su regole formulate in base ai criteri decisionali normalmente
usati dai radiologi [19].
2.4.2
CAD per il cancro al colon
Un’azienda torinesa[20], im3D, che si occupa dell’imaging medico in collaborazione
con l’IRCC (Istitute for Cancer Research and Treatment) e l’ISI Foundation (Institute for Scientific Interchange), un progetto di ricerca per lo sviluppo di soluzioni
di immagini mediche nella diagnosi precoce delle malattie tumorali, ha progettato
e realizzato CAD-COLON, un sistema di diagnosi estremamente preciso, capace di
2
Rappresentazione di un segnale mediante l’uso di una forma d’onda oscillante di lunghezza
finita.
2.4.2 CAD per il cancro al colon
27
elaborare i dati forniti dalla TAC dell’addome e del bacino del paziente, identificando le zone sospette su un modello tridimensionale del colon, in grado di supportare
i medici nell’attività di prevenzione e diagnosi precoce del tumore al colon.
Nelle sperimentazioni effettuate si è rilevata una sensibilità media del 98,2% nell’individuazione di polipi o tumori di misura clinicamente significativa; il tumore al
colon in molti casi si sviluppa sotto forma di polipo e nel tempo può evolvere in forme maligne. CAD-COLON è l’integrazione, in un unico sistema, di due componenti:
elevata accuratezza della prestazione diagnostica del CAD e la capacità di elaborazione di una grande quantità di immagini, tipica della coloscopia virtuale (VC). Il
risultato è un sistema diagnostico ad elevate prestazioni che supporta il radiologo
nella sua attività di diagnosi, migliorando i tempi di lettura e l’efficacia nell’individuare, evidenziare e classificare lesioni sospette. Questa nuova tecnologia aiuta il
radiologo nella diagnosi precoce dei polipi, favorendo la loro identificazione quando
ancora sono di piccole dimensioni e facilmente asportabili, ovvero molti anni prima
che si trasformino in un tumore. L’esame ha una durata di 15 minuti e, al termine,
il sistema produce un documento finale riassuntivo che può essere o aggiornato, o
stampato o archiviato elettronicamente, in base alle esigenze del medico radiologo.
Le aree di applicazione di uno strumento cosı̀ innovativo sono diverse:
• esame non invasivo per pazienti che siano risultati positivi all’esame occulto
delle feci (FBOT);
• test di prevenzione nei pazienti a rischio (anamnesi familiare del cancro al
colon);
• strumento per attività di follow-up per i giovani radiologi;
• supporto all’indagine endoscopica per l’attività di asportazione o alternativa nel caso in cui l’indagine endoscopica risulti impraticabile per motivi di
malformazioni od occlusioni.
Figura 2.7: Esempio dell’interfaccia del CAD-COLON
CAD-COLON viene considerata la grande evoluzione della Colonoscopia Virtuale,
in quanto risolve tutti i limiti che sinora ne hanno frenato l’applicazione, come il
tempo impiegato dal radiologo nell’analisi di moltissime immagini (spesso più di mille
2.4.2 CAD per il cancro al colon
28
per paziente) e il calo del livello di attenzione del radiologo, che è fisiologicamente
inevitabile dopo un certo numero di letture e può incidere sulla precisione. CADCOLON svolge autonomamente quest’attività, leggendo e analizzando i dati della
colonoscopia ed evidenziando tutte le aree sospette; in questo modo, favorisce il
radiologo che può concentrarsi maggiormente sulle diagnosi con dei tempi di lettura
ridotti e livelli di sensibilità e di attenzione molto elevati.
Medigicsiht PLC [21] è un’azienda leader nel settore dello sviluppo di sistemi CAD
e software per l’analisi di immagini mediche, ha sviluppato i risultati su un nuovo
studio [?] che ha dimostrato l’elevata sensibilità di un CAD nella rilevazione di
tumori colonrettali in CT multi-strati di colonografia, ColonCAD. I risultati hanno
dimostrato che quando radiologi, esperti o poco esperti, leggono una colonografia
usando il CAD la sensibilità aumenta. Lo studio, condotto a Pechino, in Cina, include
60 pazienti, precedentemente analizzati, affetti da tumore al colon. I dati dei pazienti
sono stati rivisti, prima senza il CAD e successivamente con il supporto del CAD, da
quattro radiologi (due esperti e due non esperti), che non conoscevano la patologia
e i risultati della colonografia. I risultati mostrano che la sensibilità dei radiologi
esperti aumenta dall’80% al 97% e quella dei non esperti dal 73% al 90%. Medicsight
ha richiesto l’approvazione all’FDA per questo prodotto, ColonCAD, un algoritmo
avanzato per l’analisi di CT del colon e per evidenziare automaticamente le zone
sospette che possono essere indicatori di malattia.
Capitolo 3
CAD polmonare
La diagnosi precoce delle neoplasie rappresenta il miglior metodo per ottenere una
riduzione della mortalità. Come è stato discusso nel capitolo precedente, i programmi di screening, volti al controllo sistematico della popolazione asintomatica selezionata secondo criteri epidemologici e statistici, sono sempre più incoraggiati. Nel
caso specifico della neoplasia polmonare è stato dimostrato che la rivelazione precoce con resezione chirurgica può migliorare la prognosi in modo significativo: la
sopravvivenza complessiva a cinque anni risulta del 14%, ma è pari al 67% per tumori diagnosticati nello stadio operabile, che però non danno sintomi [23]. I risultati
sperimentali di screening basati su radiografia del torace ed esame citologico
1
dei
bronchi, non sono sufficenti a dimostrare la riduzione del grado di mortalità, anche a
causa della bassa sensibilità della radiografia del torace nel rilievo di micronoduli. Il
metodo migliore per rivelare noduli dimesionalmente inferiori ai 5 mm di diametro
è la Tomografia Computerizzata (CT), in particolare con tecnologia a spirale, che
permette di ottenere scan di CT con fette di spessore inferiore a 1 mm.
Tra gli studi che hanno confrontato l’efficacia della CT spirale con la radiografia
al torace c’è ELCAP (1999) ha eseguito uno screening su 1000 soggetti a rischio; i
risultati hanno evidenziato una maggiore positività della CT, che individua tumori in stadio iniziale con una resecabilità globale pari al 96%. Tuttavia i protocolli
standard della CT del torace prevedono elevate dosi di radiazione al paziente ed il
conseguente rischio di induzione di danno da radiazione, li rende poco proponibili
in un programma di screening esteso a tutta la popolazione. Diversi studi hanno
dimostrato che una riduzione della dose nella CT non provoca una riduzione della
sensibilità neanche per micronoduli; le potenzialità offerte dalla CT spirale a bassa
dose hanno rinnovato l’interesse nella possibilità di effettuare programmi di screening
della neoplasia polmonare. Il numeo di immagini da analizzare in questi programmi
con CT è molto elevato; in particolare utilizzando CT spirale multi-slice si ricostruiscono fino a 500 immagini per paziente. Poiché i tumori non rivelati costituiscono un
1
Osservazione al microscopio delle cellule.
29
3.1 MAGIC-5
30
problema nell’analisi, in Giappone è stato adottato il metodo della doppia lettura
indipendente, che però raddoppia la richiesta di tempo del radiologo [23]. Proprio
per questo motivo molti progetti di ricerca hanno di recente iniziato a sviluppare
sistemi CAD anche in questo campo.
Di seguito vengono riportati esempi di sistemi CAD sviluppati da due gruppi di
ricerca di Pisa e Bari; entrambi hanno lavorato sulla rivelazione automatica di noduli
polmonari in CT a bassa dose tramite un sistema di diagnosi computerizzata; il
CAD sviluppato dal gruppo di Pisa prende il nome di Voxel Based Neural Approach
(VBNA), quello di Bari Region Growing Voxel Plateaux (RGVP).
3.1
MAGIC-5
Medical Application on a Grid Infrastructure Connection è un progetto, dell’Istituto
Nazionale di Fisica Nucleare, che mira a sviluppare un piano di ricerca per lo studio
dei modelli e di algoritmi per l’analisi di immagini biomediche, facendo uso dei servizi
di rete.
I due obiettivi principali sono:
1. Sostenere la diagnosi del radiologo, fornendo algoritmi un grado di rilevare
automaticamente strutture patologiche;
2. Migliorare la velocità di calcolo, l’accessibilità ai dati e la condividione di un
database di immagini distribuite.
L’analisi di immagini biomediche per mezzo di sistemi automatici, come già discusso in precedenza, riceve un intersse crescente da parte della comunità scientifica.
Questo progetto mira a sviluppare e migliorare i sistemi automatici per la diagnosi
assistita al seno, del polmone e le patologie del cervello, basati sia su paradigmi
fisici-computazionali sia su analisi statistiche-epidemologiche.
Questa ricerca mira, appunto, a studiare e sviluppare paradigmi computazionali
per il tratatmento di un enorme quantità di dati, sfruttando l’esperienza acquisita
nel campo della fisica sperimentale, dove sono utilizzati schemi di riconoscimento e
tecniche di classificazione.
Uno degli obiettivi principali è l’utilizzo di sistemi distribuiti (GRID) per l’analisi
dei dati. In realtà, le immagini mediche rappresentano una base di dati intrinsicamente distribuita, registrati nei diversi centri. I servizi di rete consentono un’analisi
interattiva con ogni del sistema.
I temi principale del programma di ricerca sono:
• Sviluppo di modelli e algoritmi: algoritmi per la segmentazione mammografica, polmonare e di immagini del cervello, con caratterizzazione e classificazione delle regioni sospette;
3.1.1 Database di MAGIC-5
31
• Applicazioni in campo medico: analisi automatica di immagini distribuite
in un programma di screening, diagnosi precoce di neoplasie polmonari in CT
a spirale, e fusione di immagini di Risonanza Magnetica Nucleare (RNM) e
SPECT/PET per l’analisi di anomalie del cervello;
• GRID: sviuppo di un sistema di lavoro per l’analisi interattiva di dati distribuiti nelle Università e negli Ospedali, coinvolti nel progetto. In questo modo
è possibile utilizzare un database distribuito per la formazione o sperimentazione degli algoritmi, analizzarli ed eseguirli quando richiesto dal CAD (on
demand).
3.1.1
Database di MAGIC-5
L’attività di ricerca nel campo dell’analisi di immagini mediche attualmente portata
avanti nel contesto di MAGIC-5 è stata iniziata nel 1998 dal progetto CALMA. Nel
corso degli anni ha condotto allo sviluppo di prototipi di CAD mammografico e
polmonare, attualmente in fase di validazione e perfezionamento [24].
Tutto lo sviluppo degli algoritmi si basa sulla disponibilità di un database di immagini digitali (o digitalizzate) a cui sia associato il cosidetto ground truth, che nel
caso delle mammografie è costituito dalla biopsia per i positivi e dal follow-up per i
negativi, mentre nel caso di CT polmonari, vista l’assenza di criteri derivanti da ulteriori approfondimenti diagnostici (come esami boptici, istologici o citologici), che
in questo particolare esame diagnostico solitamente non vengono effettuati prima
che l’eventuale nodulo sospetto abbia raggiunto grandi dimensioni, i criteri saranno
concordati con i radiologi in conformità con i protocolli internazionali.
Per questo motivo, sia per le mammografie che per le CT polmonari, sono stati creati
dei database (DB) di ragguardevoli dimensioni ( circa 4000 mammografie, circa 160
scansioni da CT polmonare per un totale di circa 48000 immagini di singole slices),
utilizzati per o sviluppo, il test e la validazione degli algoritmi. La loro qualità e
le loro dimensioni sono tali da poterne fare dei punt di riferimento utilizzati dalla
comunità internazionale.
Un database completo e affidabile di CT del torace costituisce uno strumento di
lavoro indispensabile sia per la realizzazione e l’ottimizzazione di algoritmi di queste
immagini, sia per il loro test. La particolare necessità di poter disporre di un tale
strumento da part di sviluppatori di software e sistemi CAD nel campo della diagnosi precoce delle neoplasie polmonari è giustificata dalle peculiarità proprire della
ricerca.
In particolare, le peculiari caratteristiche del percorso diagnostico rendono fndamentale la fase di determinazione radiologica della presenza di regioni sospette e la
valutazione della loro dimensione nelle CT di follow-up, e rendono quindi molto importante la fase di annotazione e refertazione delle scansioni che possono costituire
3.1.1 Database di MAGIC-5
32
un database di riferimento. Nella maggior parte dei casi non si ha a disposizione una
verità bioptica, istologica o citologica; è per questo che è ancora aperto un dibattito
internazionale relativo alla determinazione di un gold standard per i database di
riferimento e dei percordi da intraprendere per garantire la massima affidabilità ai
dati [25].
A livello internazionale, attualmente gli unici database pubblici di CT polmonari sono quello reso disponibile dal consorzio LIDC [26] e quello proposto per la
competizione ANODE09 [27].
Il Lung Image database Consortium (LIDC) è un progetto che coinvolge quattro tra
le più importanti università americane, sotto la guida del National Cancer Istitute
(NCI) con lo scopo di sviluppare delle linee guida nella raccolta, nella valutazione di
CT polmonari e nella costruzione di un database di immagini relative, nella diagnosi
del cancro al polmone. Esso mette a disposizione, gratuitamente immagini per la
valutazione di un sistema CAD e per l’addestramento di radiologi alle prime armi. Le
CT a disposizione ora sono 85, disoomogenee sia per i parametri di acquisizione che
per quelli di costruzione, e sono accompagnate dalle refertazioni di quattro radiologi.
La competizione ANODE09 consiste nella proposta di validare sistemi CAD su database di 50 CT polmonari provenienti dallo studio olandese, Nelson study, omogenee
sia per i parametri di acquisizione che per quelli di ricostruzione, di cui non si conosce
la refertazione. Sono inoltre disponibili 5 CT annotate di prova.
Per quanto riguarda l’Italia, nell’ambito della collaborazione MAGIC-5, la raccolta e
la refertazione di CT polmonari, sia provenineti dal progetto di screening ITALUNGCT
2
che cliniche, ha costituito una delle attività di ricerca degli scorsi anni. At-
tualmente il database consta in totale di 160 CT a bassa dose ed alta risoluzione,
omogenee sia per i parametri di acquisizione che per quelli di ricostruzione, fra le
quali sono state selezionate 50 CT provenienti dal progetto ITALUNG-CT che attualmente costituiscono il cosidetto database Gold Standard che costituisce lo
strumento mediante il quale vengono effettuati i confronti delle prestazioni dei vari
algoritmi di analisi sviluppati nell’ambito della collaborazione. Le CT sono suddivise
in slice di spessore di 1mm, in accordo con il protocollo di bassa dose, il numero di
slice per scan è di di 300 con una matrice 512 × 512, la grandezza di un pixel va da
0.53 a 0.74 mm e,infine, 12 bit di livelli di grigio nell’Unità Hounsfield (HU). Ogni
immagine viene convertita in formato DICOM (Digital Imaging and Communications in Medicine). In accordo con il protocollo dello screening di ITALUNG-CT, i
radiologi evidenziano noduli con un diametro maggiore di 5 mm, perché potrebbe
indicare la presenza di tumore, quando si esegue una diagnosi precoce della malattia.
Una volta identificati, i noduli vengono tenuti sotto controllo da un follow-up di esa2
ITALUNG-CT è un progetto che si propone di dare un contributo a livello europeo sullo scree-
ning del tumore al polmone e ha in corso l’analisi di 3.000 soggetti tra le città di Pisa, Firenze e
Pistoia.
3.2 Caratteristiche di un sistema CAD polmonare
33
mi di CT spirale, in cui vengono anche analizzati i noduli con diametro compreso tra
3 e 5 mm di formazione recente; mentre quelli che hanno un diametro maggiore di
8 e 10 mm sono destinati ad esami più accurati come PET e biopsia. Alcuni esempi
di noduli interni, rivelati in questo studio, sono riportati in figura 2.1; possono avere
gli stessi valori di intensità di vasi sanguigni e delle pareti aeree collegate tra loro
nella CT.
Figura 3.1: Esempi di piccoli noduli polmonari interni
3.2
Caratteristiche di un sistema CAD polmonare
Gli oggetti che un CAD polmonare deve essere in grado di riconoscere automaticamente sono costituiti da noduli e micronoduli (diametro inferiore a 3 ÷ 5 mm)
polmonari, che nelle proiezioni 2D, relative alle singole fette, appaiono molto simili
alle sezioni di strutture anatomiche non patologiche, quali ad esempio vasi sanguigni e bronchi. Le strutture patologiche si possono distinguere in tre categorie, che
dipendono dalla loro posizione nel polmone:
• noduli interni: contenuti completamente nel parenchima polmonare;
• noduli sub-pleurici: originati nel parenchima polmonare, ma adiacenti o connessi alla pleura;
• noduli pleurici: originati dalla pleura e cresciuti nel parenchima polmonare.
La procedura di indentificazione di noduli nelle tre categorie richiede un’analisi
dedicata a causa della loro diversa posizione e forma (figura 2.2).
In figura 2.3 è riportato un esempio di immagine polmonare ottenuta con CT spirale
a bassa dose, contenente un nodulo sospetto.
Come è stato già ampiamente discusso, i parametri che definiscono le prestazioni di
un sistema CAD sono la sensibilità e il numero di falsi positivi per scan. In generale,
affinché un CAD per rivelazione automatica dei noduli polmonari, abbia buone prestazioni deve comprendere un algoritmo ad alta sensibilità per la ricerca dei noduli
candidati ed un efficiente modulo per la riduzione del numero di falsi positivi. Un
3.3 Algortmo di segmentazione
34
Figura 3.2: Esempi di piccoli noduli polmonari: a)nodulo interno b) nodulo sub-pleurico c)
nodulo pleurico
Figura 3.3: Esempio di immagine polmonare da CT spirale, in cui la freccia indica il nodulo
sospetto
problema di fondamentale importanza nella realizzazione di un CAD per la rivelazione di noduli è la selezione iniziale delle immagini che potenzialmente corrispondono
ai noduli; tale selezione non si può basare solo su una soglia densitometrica (densità
del voxel), ma deve tener conto anche delle proprietà geometriche dei noduli (tipicamente la sfericità). Infatti alcuni noduli possono presentarsi con valori densitometrici
inferiori alle aspettative o molto simili a quelli dei vasi sanguigni e bronchi.
Il CAD polmonare, cosı̀ come gli altri CAD descritti, consta di alcuni passaggi
fondamentali:
• Segmentazione del parenchima polmonare;
• Individuazione di una lista di regioni di interesse, fatto nell’ambito della collaborazione di MAGIC-5 da tre algoritmi differenti (dei quali si parlerà nei
paragrafi seguenti);
• Individuazione dei falsi positivi tramite una classificazione neurale, che associa
ad ogni ROI una probabilità di rappresentare un nodulo rilevante.
3.3
Algortmo di segmentazione
Il processo di segmentazione è un passo fondamentale del sistema CAD: seleziona i
tessuti polmonari nelle fette di CT, in modo da migliorare la fase di individuazione
3.3.1 Region Growing 3D
35
dei noduli, diminuendo il numero di falsi positivi, aumentando l’effecienza come
se l’algoritmo di ricerca dei noduli viene applicato solo dove si possono trovare
realmente i noduli. Esistono diversi metodi di segmentazione come: a) knowledgebased tecniques, b) threshold metod, c) region growing, d) mathematical morphology,
e) active countour/shape models, f) cluster analysis metod.
Il CAD progettato dalla collaborazione MAGIC-5, utilizza un algoritmo automatico
di segmentazione, in tre dimensioni per assicurare la coerenza tra due fette adiacenti.
Il metodo di segmentazione consta di diversi passaggi:
1. Analisi dell’istogramma dei valori di grigio per l’individuazione di una soglia
θ0 ;
2. Region Growing 3D per la segmentazione dell’intero sistema respiratorio;
3. Wavefront algorithm per la ricostruzione dell’albero bronchiale esterno e dei
singoli polmoni per differenza;
4. Ciclo di ottimizzazione della soglia per la correzione di eventuali fusioni polmonari;
5. Closing 3D su ciascun polmone per l’eliminazione dei buchi lasciati dai vasi e
l’inclusione dei noduli interni e pleurici.
Le strutture circostanti sono, al contrario, definite da una densità maggiore e risultano di conseguenza più chiare. E’ elevato, dunque, il contrasto tra il tessuto parenchimale del polmone, che vogliamo delimitare, e i tessuti confinanti. Per distinguere il
tessuto polmonare dalle altre strutture si ricorre all’analisi dell’istogramma dei livelli
di grigio (noto anche come “istogramma delle intensità”) di una slice “centrale”della
scansione, che mostra la distribuzione dei valori di grigio presenti nell’immagine.
Si analizza una fetta “centrale” perché in essa le sezioni polmonari sono sufficientemente ampie da rappresentare in maniera significativa le intensità dei grigi tipici del
parenchima. Si ha un tipico andamento bimodale, ossia caratterizzato da due picchi
principali: il primo include il parenchima polmonare, i bronchi principali e l’aria
circostante, il secondo i vasi, i muscoli ed eventuali noduli. Proprio sulla base di tale
distribuzione bimodale è facile determinare una soglia, θ0 che separi le zone chiare
da quelle scure. Questa soglia è scelta automaticamente attraverso l’applicazione
dell’algoritmo isodata, sviluppato da Ridler E Calvard [28].
3.3.1
Region Growing 3D
Alla fase di individuazione della soglia “grossolana”, θ0 , segue la segmentazione del
sistema respiratorio, basato sull’applicazione della tecnica di Region Growing (RG).
Questa tecnica, di tipo iterativo, è finalizzata all’individuazione e all’accrescimento
3.3.2 Wavefront algorithm
36
di una regione connessa, i cui voxel soddisfino ad un determinato criterio selettivo
(condizione di inclusione).
L’algoritmo si sviluppa attraverso la selezione, automatizzata, di un punto dell’immagine detto seed point iniziale, che soddisfi una determinata condizione di inclusione. Successivamente effettua un’analisi dei punti vicini al seed point scelto: se anche
questi soddisfano il medesimo criterio selettivo, verranno inclusi nella regione di accrescimento.Ognuno dei punti ”cresciuti”, diverrà esso stesso seed point (corrente) e
sarà, quindi, sottoposto ad un’analisi dell’intorno.
Il ciclo si ripete in maniera iterativa fino a quando non verranno più rilevati voxel
che possano essere inclusi nello regione di crescita (condizione di arresto).
Il criterio di selezione a cui si è fatto ricorso per la segmentazione del parenchima
polmonare è il Double Threshold (doppia soglia), basato sulla crescita dei voxel di
intensità compresa tra due soglie predefinite, minima e massima. La soglia minima
è fissata a –3000 HU, assicurandosi cosı̀ di essere in intensità ben più basse di quelle
relative al dominio polmonare; la massima è quella restituita dall’algoritmo isodata
visto nel paragrafo precedente. Con questa fase di sviluppo dell’algoritmo è possibile ricostruire l’intero sistema respiratorio, seppure in maniera grossolana (figura
2.4).Per le regole di inclusioni possono essere usati diversi metodi:
• Simple Bottom Threshold/Simple Top Threshold (SBT/STT) se l’intensità I
è più alta/bassa di un certo valore di soglia θ0 , il voxel è incluso nella region
growing
I ≥ θ (SBT)
I ≤ θ (STT);
• Mean Bottom Threshold/Mean Top Threshold (MBT/MTT) se la media dell’intensità I dei 26 voxel vicini è più alta/bassa di un certo valore di soglia θ ,
il voxel è incluso nella region growing.
< I >≥ θ (MBT)
< I >≤ θ (MTT).
3.3.2
Wavefront algorithm
Dopo aver segmentato il parenchima polmonare e le vie respiratorie mediante RG,
il passo successivo è l’eliminazione della trachea e dei bronchi extra-polmonari fino
all’ingresso del polmone, nella regione ilare. Questa regione, detta ilus polmonis, è
zone di ingresso di vasi, bronchi e nervi all’interno del parenchima polmonare, e si
presenta come una regione difficile da segmentare. Nonostante siano stati stabiliti
dei protocolli [29] sul comportamento di un segmentatore polmonare in questa zona,
i risultati non sono molto accurati, evidenziando un’incoerenza tra fette successive,
in alcune delle quali una parte dei bronchi viene inglobata nel volume segmentato,
3.3.2 Wavefront algorithm
37
Figura 3.4: Maschera binaria in 3D del sistema respiratorio
in altre ne è esclusa. La rimozione della struttura bronchiale esterna ha il vantaggio
di ridurre il volume restituito dal segmentatore, diminuendo cosı̀ i tempi di calcolo
dei successivi stadi di ricerca dei noduli ed il numero di falsi positivi. L’algoritmo
utilizzato è una variante del region growing, che combina i principi fondamentali
della tecnica tradizionale con un modello di simulazione di un fronte d’onda. La
tecnica si basa sulla propagazione, a partire da un seed point, scelto sulla sommità
della trachea, di un fronte d’onda, definito come luogo dei voxel che si trovano alla
medesima distanza dal seed. Accanto all’inclusione dei punti soddisfacenti alla regola di inclusione, l’algoritmo registra la distanza di ciasc punto incrementato dal
seed point iniziale. Si crea una distance map (mappa della distanza) che permette di
seguire la ricostruzione dell’albero bronchiale esterno. Attraverso, poi, l’inclusione di
opportune condizioni di blocco è possibile bloccare la crescita in prossimità della regione ilare. Al fine di evidenziare la regione di ingresso dei bronchi nel parenchima si
sviluppa un approccio basato sull’analisi dei profili di crescita, ovvero del volume del
fronte donda in funzione della relativa iterazione. Il fronte d’onda simulato dall’algoritmo si propaga dalla trachea lungo la struttura tubolare, approssimativamente
uniforme, del bronco principale; non appena il bronco entra nel polmone, di analoga
densità, il fronte d’onda registra un’esplosione (brusco aumento del volume), espandendosi quadraticamente. Questa condizone è rapportata al fatto che il numero di
voxel inclusi nel volume aumenta per via dell’inclusione dei punti del parenchima. In
tal modo, attraverso la rilevazione dell’esplosione è possibile identificare la regione
ilare e bloccare la crescita dei bronchi in corrispondenza della stessa. Ciò a cui si
arriva è l’estrazione della struttura bronchiale esterna, dalla trachea fino al suo in
gresso nel parenchima (vedi figura 2.5).
Dopo segue l’operazione di differenza tra la matrice dell’intero sistema respiratorio
3.3.3 Ciclo di ottimizzazione della soglia
38
Figura 3.5: estrazione della trachea e bronchi esterni
e quella della sola trachea-bronchi esterni: è da questa operazione che si giunge alla
ricostruzione dei soli polmoni (vedi figura 2.6).
Figura 3.6: Operazione di differenza, ottenendo solo i polmoni
3.3.3
Ciclo di ottimizzazione della soglia
Nell’analisi delle immagini delle CT assiali, si nota un’apparente fusione delle die sezioni polmonari in un singolo oggetto (vedi figura ?? dovuta al fatto che la giunzione
che separa i due polmoni è pesso molto sottile e di debole contrasto. Ciò comporta
una serie di problemi in fase di segmentazione del parenchima. Ad esempio, se si
ha un contrasto debole, una segmentazione basata sull’analisi della distribuzione dei
livelli di grigio può non separare le due parti: in questo caso i polmoni vengono erroneamente considerati come un unico oggetto. Si parla, in questo caso, di “fusione”
polmonare.
Una errata classificazione degli oggetti legata a queste situazioni, può essere causa di
un malfunzionamento dell’algoritmo di segmentazione. Per ovviare a questo problema è introdotta una tecnica basata sull’aggiustamento del valore di soglia massima
utilizzato per il region growing, che viene abbassato gradualmente a partire dal valore
grossolano iniziale, fino a quando non si verifica più la fusione dei due polmoni.
3.3.4 Closing 3D
39
Figura 3.7: Problema della fusione polmonare
3.3.4
Closing 3D
I due polmoni cresciuti mediante l’algoritmo di region growing, vengono salvati in
due matrici diverse, poichè è sul singolo polmone che verrà applicato il successivo
stadio dell’algoritmo, quello di chiusura.
A questo livello di sviluppo, il sistema è stato in grado di delimitare il volume polmonare senza però includere, in quanto non soddisfano la regola di inclusione, le
varie tipologie di noduli e i vasi interni. Per poter includere nel volume segmentato
queste strutture dense di piccola dimensione, è stata impiegata un fase di chiusura morfologica, (closing), tridimensionale. La necessità di inserire i vasi interni è
dettata dalla possibilità di avere noduli a contatto vascolare.
Questo è un passaggio importante anche perchè permette una corretta trattazione
dei noduli pleurici, che per la loro densità e posizione tendono ad essere lasciati fuori
dal volume segmentato.
Il closing si basa sull’applicazione consecutiva dell’operazione di dilatazione e di
erosione. In fase di dilatazione il parenchima, espandendosi, ingloba in sé i noduli
pleurici e le cavità prodotte dall’ingresso ritorna alle sue dimensioni originali.
Effettuando una differenza tra la matrice originaria e quella risultante dall’applicazione del closing 3D, è poi possibile isolare tutto quello che non è tessuto polmonare
o bronchiale, ovvero i noduli pleurici e interni, le concavità legate alla peculiare
forma del polmone, le diramazioni interne dell’albero vascolare e naturalmente una
certa quantità di rumore.
L’algoritmo di segmentazione restituisce una lista di regioni di interesse, candidate
alla classificazione, con le relative informazioni statistiche (posizione, volume, sfericià
ecc.).
3.4 Identificazione candidati noduli: metodo ROI Hunter
40
Figura 3.8: Problema della fusione polmonare
3.4
Identificazione candidati noduli: metodo ROI Hunter
Dopo il primo step della segmentazione, si passa all’identificazione dei candidati noduli. Partendo da qui, all’interno della collaborazione MAGIC-5 sono stati progettati
tre sistemi CAD: VBNA, RGVP, V-ANTS (il quale sarà ampiamente presentato
nel capitolo successivo, e sul quale si basa questo lavoro di tesi), dei gruppi di ricerca
di Pisa, Bari e Torino rispettivamente.
3.4.1
VBNA
Il passaggio della rivelazione dei candidati noduli viene effettuata nel volume individuato dalla fase di segmentazione. I noduli polmonari sono simili a oggetti sferici
con un profilo Gaussiano e la matrice in 3D di dati è filtrata tramite una funzione
zdot (detta filter function) che distingue oggetti sferici da oggetti che hanno forma
planare o allungata. In particolare, zdot è definita tramite gli autovalori di una matrice Hessiana:
( |λ2 |
3
|λ1 |
zdot (λ1 , λ2 , λ3 ) =
0
seλ1 , λ2 , λ3 < 0
seλ1 , λ2 , λ3 > 0
dove λ1 ,λ2 ,λ3 sono gli autovalori della matrice Hessiana di ogni voxel, ordinati in
modo che |λ1 | ≥|λ2 | ≥|λ3 |. Lo scopo è ottenere un valore di sensibilità ottimale
(molto vicino al 100%); per questo la funzione zdot è la combinazione di valori di
appianamento (smoothing) gaussiani in scala diversa: σmin = σ1 ,. . . . . .,σmax = σN .
3.4.2 RG
41
Entro il range [σ1 ,σN ] i valori di appianamento sono calcolati come σi = ri−1 σ1 con
i = 2, ..., N − 1 dove r = (σN /σ1 )1/N −1 .
Il valore finale del filtro zmax assegnato ad ogni voxel è definito come il massimo valore di zdot ottenuto dai differenti valori di scala, moltiplicata per il relativo fattore
di scala:
zmax = maxi[1,...,N ] σi2 zdot (σi )
Questo filtro viene implementato sulle CT con il risultato di generare un numero
elevato di falsi positivi (FP).
3.4.2
RG
Per il sistema CAD RG, il processo di individuazione, consiste nella rivelazione dei
candidati noduli all’interno dei un working volume. Questo è implementato dall’algoritmo RG con delle regole di inclusione scelte in base alla combinazione di MBT
e SBT. La soglia viene scelta per massimizzare la sensibilità ( o l’efficienza) definita
come il rapporto tra la frazione di noduli selezionata rispetto al numero totale di
noduli diagnosticati dal radiologo.
Figura 3.9: Working Volume
Per valutare l’efficenza si definiscono false positives (FP) i possibili noduli che
soddisfano la diagnosi del ragiologo, secondo queste condizioni:
dove {(Xrad , Yrad , Zrad ), Rrad } sono le coordinate del centro e il raggio del cerchio
individuato dal radiologo, e {(X, Y, Z), R} sono le coordinate individuate dal CAD.
Tutti gli altri candidati sono considerati falsi positivi.
3.5
Riduzione dei falsi positivi
L’ultimo passaggio di un sistema CAD polmonare è la riduzione del numero di falsi
positivi ottenuti, per la maggior parte incroci tra i vasi sanguigni come si può vedere
in figura ??.
3.5.1 VBNA
3.5.1
42
VBNA
Per ridurre il numero di FP/imagine è stata sviluppata una procedura chiamata
Multi-Scale Voxel-Based Neural Approach (VBNA), dal quale rende il nome
il CAD.
Una ROI è definita come un insieme di voxel ν, che formano una sfera di raggio
intorno ai 5 pixel, identificato dal filtro e con un valore d’intensità Iν al di sopra di
una soglia t, definita come:
1
(3.1)
t = max Iν − ( max Iν − min Iν)
νsf era
νsf era
3 νsf era
Per non avere nella ROI solo i voxel che appartengono alle strutture calcificate che
possono essere presenti nella sfera, si considerano i voxel che hanno un valore di intensità Iν ≥ 200HU . Nella figura 2.10, è riportato un esempio di ROI corrispondente
ad un nodulo interno di diametro 5.5 mm.
Figura 3.10: Slice consecutive che contengono un nodulo interno di diametro pari a 5.5 mm
e la corrispondente ROI.
Si considera un possibile nodulo, se il voxel identificato attraverso il filtro, rimane
all’interno della sfera centrata nel nodulo avente un diametro pari alle dimensioni
del nodulo.
Figura 3.11: Idea base del VBNA: ciascun voxel è caratterizzato da un vettore di caratteristiche costituite dai valori d’intensità dei voxel vicini e degli autovalori della matrice del
gradiente Hessiano.
L’idea base di questo classificatore per la riduzione dei falsi positivi è associare a
ciascun voxel un vettore di caratteristiche costituito dai valori di intensità dei voxel
vicini in 3D e i tre autovalori della matrice del Gradiente definito come:
3.5.2 RG
43
X
G=[
∂xi I∂xj I]
(3.2)
con i, j = 1, 2, 3, I(x1 , x2 , x3 ) funzione intensità e la sommatoria sull’area dei voxel
vicini (come si può vedere dalla figura 2.11 e i tre autovalori della matrice Hessiana
definita come:
H = [∂x2 I]
i,j
(3.3)
Infine i vettori delle caratteristiche vengono classificate tramite una rete neurale a
tre strati feed-forward back-propagation, che è addestrato e testato per assegnare a
ogni voxel un valore che lo identifica come appartenente ad un nodulo o a tessuto
normale.
3.5.2
RG
Per la riduzione dei falsi positivi del sistema CAD RG, si eseguono due passaggi:
• Filtro rule Based: si effettuano due tagli sul volume;
• Rete Neurale feed-forward:con i candidati noduli rimanenti, tramite una procedura di validazione di tipo leave one out, si addestra una rete neurale feedforward con uno strato di neuroni nascosti.
Le caratteristiche di input sono:
• Volume, V ;
• Rotonditá, R = V /Vs , dove Vs é il volume della sfera piú piccola contenente la
regione segmentata;
• Raggio, r definito come la distanza media tra il centro del nodulo e i punti del
bordo.
La tecnica di validazione leave-one-nodule-out é usata per analizzare il piú alto
numero possibile di true positive durante la fase di test.
Region Growing è una tecnica di analisi di immagini che consiste nella ricerca di
regioni di pixel connesse che soddisfano alcune regole di inclusione. I punti fondamentali dell’algoritmo sono:
• Scelta di un seed point e analisi di punti vicini;
• Se i punti vicini soddisfano le regole di inclusione, vengono inclusi nella region
growing, altrimenti vengono esclusi;
• Tutti i punti inclusi ad un certo punto diventano seed point per i passaggi
successivi;
3.5.2 RG
44
• Questo procedimento continua sin quando un punto non soddisfa le regole di
inclusione.
Il problema principale di questo algoritmo è la scelta corretta del seed point che può
essere effettuata automaticamente: il primo voxel che soddisfa la regola di inclusione
è scelto come punto di partenza dell’algoritmo; la regione segmentata è rimossa
dall’immagine e aggiunta alla lista di regioni di interesse; si ricomincia con la ricerca
di un nuovo seed point. Per le regole di inclusioni possono essere usati diversi metodi:
• Simple Bottom Threshold/Simple Top Threshold (SBT/STT) se l’intensitá I
é piú alta/bassa di un certo valore di soglia θ, il voxel é incluso nella region
growing
I ≥ θ (SBT)
I ≤ θ (STT);
• Mean Bottom Threshold/Mean Top Threshold (MBT/MTT) se la media dell’intensitá I dei 26 voxel vicini é piú alta/bassa di un certo valore di soglia θ ,
il voxel é incluso nella region growing.
< I >≥ θ (MBT)
< I >≤ θ (MTT)
Nella figura 2.12 riportata di seguito, vengono sintetizzati i passaggi fondamentali
di un sistema CAD.
3.5.2 RG
45
Figura 3.12: Passaggi fondamentali del sistema CAD
Capitolo 4
Channeler Ant Model
Gli Ant Colony Models sono simulazioni computazionali di agenti virtuali che utilizzano delle regole di comportamento per progettare strategie di cooperazione o
competizione tramite colonie di formiche: il fenomeno di un comportamento globale
e autonomo rispetto allo scopo, può quindi essere sfruttato per risolvere problemi
complessi. Questo modello ha avuto delle soddisfacenti applicazioni, dalle tecniche
di ottimizzazione [30, 31] alla robottistica [32]. Negli anni Novanta è iniziato l’uso
di colonie di formiche nell’analisi di immagini e segmentazione di oggetti (di solito affrontate con algoritmi classici come region growing, modelli di forme e bordo,
algoritmi di genetica ecc.).
Alcune soluzioni sono state sviluppate per l’analisi, la segmentazione e lo studio
della soglia di immagini in due dimensioni, ma poche sono state utilizzate in un
ambiente a tre dimensioni. Il modello proposto, chiamato Channeler Ant Model
(CAM) è sviluppato in tre dimensioni, poiché tutte le attività svolte da una formica,
come la forzatura, l’alimentazione, la costruzione del nido e altro, si verificano in un
ambiente 3D. E’ una soluzione elegante che dipende da pochi parametri ed offre
eccellenti prestazioni su immagini con dinamiche e livelli di rumore differenti e apre
numerose possibilità di svolgere ulteriori ricerche. Il campo di applicazione di questo
modello, proposto in questo lavoro di tesi, è lo sviluppo di un algoritmo per la ricerca
automatica di noduli polmonari in Tomografie Computerizzate (CT).
4.1
Gli insetti sociali
Tra il 1960 e il 1970 sono stati studiati vari insetti sociali; i membri di una colonia
di insetti, per la maggior parte del tempo, comunicano attraverso la percezione
gustativa e olfattiva di sostanze chimiche rilasciate da altri individui. Sono degli
esseri altruisti, caratteristica definita da alcuni geni, che assicura l’evoluzione e la
sopravvivenza della specie. I ricercatori hanno dimostrato che la divisione in caste
che esiste in gran parte delle specie di formiche non è dovuta ai geni o al cibo, ma a
46
4.1.1 Modellizzazione delle formiche
47
fattori ambientali. Tra tutti gli insetti sociali esistenti, le specie di maggior successo
sono quelle che rispettano le seguenti regole:
• Gli individui adulti devono prendersi cura dei figli più piccoli;
• Due o più generazioni di insetti vivono nello stesso nido;
• I membri della colonia sono divisi in almeno due caste, quella riproduttiva e
quella lavorativa, che è sterile.
Tra tutte le specie quelle che rispettano meglio queste regole sono le formiche; la
loro capacità di sopravvivenza si basa su un incredibile capacità di lavoro e sacrificio
per l’evoluzione della colonia.
4.1.1
Modellizzazione delle formiche
In [30] Bonabeau definisce la differenza tra la modellizzazione e la progettazione
di un modello biologico, ad esempio tra il vero comportamento della formica e gli
aspetti del sistema naturale. Secondo gli autori, quando si parla di modellizzazione,
si cerca di capire ciò che accade in una colonia di formiche e, realmente, in che modo
appare il suo comportamento. Ogni aspetto del modello deve essere supportato da
una motivazione biologica; molti comportamenti della colonia, come l’ottimizzazione
del percorso, la divisione dei compiti, l’organizzazione della fine della colonia, possono essere modellizzati. Gli insetti sociali costituiscono un super-organismo composto
da molti individui indipendenti, dotati di componenti sensoriali che si diffondono nell’ambiente e in grado di rispondere a stimoli esterni sulla base di informazioni locali
che possono provenire sia dallo stesso ambiente sia da colonie vicine. La percezione
della colonia è la somma delle percezioni dei singoli membri, mentre il comportamento della colonia è la somma di tutte le interazioni tra le formiche e l’ambiente,
e tra loro stesse.
Uno dei compiti più complessi eseguito dalle formiche è la costruzione del nido.
Inizialmente si era pensato che le formiche fossero antropomorfe 1 : secondo questa ipotesi, le formiche sarebbero in grado di ottimizzare le proprie decisioni e
cosı̀ la complessità del nido sarebbe il risultato del complesso comportamento degli
individui.
L’osservazione della colonia, però, ha dimostrato che le formiche non sono antropomorfe, e che la sorprendente complessità del nido è la conseguenza di una varietà di
stimoli, ai quali sono sottoposte.
4.1.2
Ottimizzazione del percorso
La selezione del percorso delle formiche è stata studiata da Deneubourg e altri, in
particolare sulla formica argentina. La configurazione di questo esperimento è molto
1
Aventi caratteristiche umane.
4.2 Channeler Ant Model
48
semplice: il formicaio è separato dalla fonte di cibo da due percorsi uguali (come si
può vedere dalla figura 3.1). All’inizio, a causa di fluttuazioni casuali, le formiche
privilegiano un percorso rispetto all’altro, depositando una maggiore quantità di
feromone e creando una scala preferenziale che attira più formiche sul percorso scelto.
Figura 4.1: Esperimento delle formiche applicato a due percorsi con uguale lunghezza.
Si crea quindi una mappa di feromone che può essere generalizzata secondo delle
regole, elencate di seguito:
• Ciascuna formica deposita una certa quantità di feromone; cosı̀ la quantità
totale in un percorso è proporzionale al numero di formiche che lo hanno
attraversato;
• I percorsi vengono indicati con A e B; Ai e Bi sono il numero di formiche
che ha usato A o B rispettivamente, dopo che i formiche hanno attraversato il
percorso, con Ai + Bi = i;
• La (i + 1) formica sceglierà il tratto A con probabilità data da:
PA =
(k + Ai )n
= 1 − PB
(k + Ai )n + (k + Bi )n
(4.1)
dove n rappresenta il grado di non-linearità della funzione scelta; quando n è
grande, il ramo con più alta densità di feromone avrà un’alta probabilità di
essere scelto. Il grado di attrazione di un ramo non visitato è rappresentato,
invece, da k.
Lo stesso modello può essere utilizzato per un ponte con percorsi di diverse lunghezze.
Le formiche scelgono il tratto più corto: quando una formica ritorna con il cibo sul
ramo più lungo, il ramo più corto sarà già stato visitato più volte (a seconda del
rapporto tra la lunghezza dei due percorsi), avendo cosı̀ accumulato più feromone e
attirando, quindi, più formiche. La mappa creata può essere osservata in figura 3.2.
4.2
Channeler Ant Model
Il movimento di colonie di formiche in un immagine 3D potrebbe essere utilizzato, ogni volta che devono essere identificate e ricostruite strutture complesse, con
ramificazioni di dimensioni e intensità diverse: viene quindi proposto un modello generale, validato su immagini con proprietà note (differente rapporto segnale/rumore
4.2.1 Membri della colonia
49
Figura 4.2: Bridge Experiment con due percorsi di lunghezza differenti.
e intensità variabile). Lo sviluppo del modello Channeler Ant Model (CAM) è nato dall’idea di ricercare noduli sospetti in CT polmonari: nell’analisi di CT, questo
modello si usa per segmentare l’albero bronchiale e vascolare per poi rimuoverlo e
ricercare strutture nodulari nell’immagine con un filtro dedicato, anch’esso basato
sul CAM.
4.2.1
Membri della colonia
Il comportamento delle formiche è descritto da quattro tipi di regole:
• regole di movimento;
• regole di rilascio di feromone;
• regole di riproduzione/morte;
• comportamenti delle formiche in risposta ad anomalie.
Le formiche esplorano l’ambiente spaziale 3D secondo le proprietà (come posizione
e intensità) degli elementi di volume discreti (voxel); il loro ciclo di vita è definito
da passi, durante i quali le formiche si muovono da un voxel a uno dei vicini. Cosı̀
al tempo t una formica k si trova nel voxel vi ; dopo un ciclo di vita (al tempo t + 1)
si muoverà in vj . Un voxel ha 26 vicini di primo ordine, in accordo con la legge di
Moore [34].
Nella colonia vivono due tipi di individui: regina e operaie. La regina agisce come un
osservatore: svolge compiti connessi al coordinamento della colonia, decide quando
una formica muore e quando nasce.
Le operaie sono responsabili della costruzione del nido (per esempio la segmentazione di un oggetto, nel nostro caso dell’albero bronchiale e vascolare): si muovono
nell’ambiente e depositano feromone in accordo con le regole del modello. Pertanto,
sono possibili i seguenti compiti:
• Regina: dal punto di vista della regina lo scopo finale dell’algoritmo non è interessante; il punto importante è la supervisione dell’evoluzione dell’algoritmo.
La regina ha una visione globale dell’intero ambiente ma non può interferire o
4.2.2 Regole di movimento
50
cambiare in alcun modo il lavoro delle formiche, oppure la scelta della direzione ecc. Praticamente, la regina può essere vista come la figura più importante,
che verifica il rispetto delle regole evolutive della colonia;
• Operaie: agiscono localmente; una singola formica percepisce solo le proprietà
dell’ambiente locale, in una determinata unità di tempo, e segue delle regole di
comportamento. La formica non è a conoscenza dello stato dell’evoluzione della
colonia o dello scopo: si concentra completamente sui suoi compiti ignorando
i comportamenti che potrebbero insorgere nell’evoluzione della colonia.
L’ambiente è definito dall’intensità del voxel dell’immagine, che può essere visto
come la quantità di cibo disponibile: pertanto, l’intensità del voxel dovrebbe progressivamente diminuire, quando il numero di visite aumenta. Questo meccanismo,
richiesto per evolvere la colonia ed esplorare l’ambiente: ogni volta che viene raggiunto il numero massimo di visite in un voxel (NV ) e la quantità massima di feromone
(Tmax ), il voxel non è più disponibile come destinazione.
4.2.2
Regole di movimento
La casualità è un fattore importante nell’organizzazione della colonia; può assicurare
un buon equilibrio tra la scelta di un percorso ben definito e la probabilità di trovare
dei percorsi migliori, provocando l’esplorazione di nuove regioni. Come in natura,
nell’algoritmo CAM la scelta della destinazione, inizialmente, è casuale; tuttavia
tiene conto della conoscenza dell’ambiente totale della colonia, data dalla quantità di
feromone già rilasciata in una data posizione (σj ). Una grande quantità di feromone
in un voxel deve corrispondere ad un valore di probabilità alta.
Le formiche si muovono di un passo per ogni ciclo di vita; pertanto, una formica k,
locata nel voxel vi al tempo t, deve scegliere la direzione, secondo le seguenti regole:
• solo n = 26 sono le possibili destinazioni;
• per ogni voxel vi vicino, si calcola la probabilità Pij , fondamentale per la scelta
della destinazione;
• se una formica è rilevata in vj , Pij viene posta uguale a 0;
• ad ogni candidato è assegnata una probabilità attraverso un algoritmo casuale(roulette wheel ) che rappresenta la scelta come possibile destinazione:
W (σj )
Pij (vi → vj ) = P26
n=1 W (σn )
(4.2)
dove W (σj ) dipende dalla quantità di feromone nel voxel vj e il denominatore
è un fattore di normalizzazione.
4.2.3 Regole di rilascio di feromone
51
Il termine W (σj ) dipende dalla sensibilità osmotropica β (più è alta, più grande è
l’influenza del feromone sulla scelta della destinazione) e dal sensore di capacità δ
(se la concentrazione del feromone è molto alta, determinerà l’abbassamento della
capacità di rilevamento del feromone)[33]:
W (σj ) =
σj
1+
1 + δ · σj
!β
(4.3)
E’ scelto un numero casuale nell’intervallo [0,1] che determina quale voxel è effettivamente una possibile destinazione.
4.2.3
Regole di rilascio di feromone
In accordo con le regole biologiche, dopo il movimento nel voxel di destinazione, la
formica k deposita una quantità di feromone T definita come segue:
T = η + ∆ph · Hf ac
(4.4)
dove η è la minima quantità di feromone depositata dalla formica, Hf ac è una costante che controlla la quantità differenziale di feromone che sarà effettivamente
depositata (∆ph ), che è una funzione dipendente dall’intensità dei voxel:
∆ph = Ψ(I)
(4.5)
La scelta della regola di deposizione, effettuata prima di avviare l’evoluzione della
colonia, è molto importante in quanto è legato al tipo di segmentazione che le formiche devono svolgere. Una formica, muovendosi da un voxel vi in vj con intensità I(vi )
e I(vj ) rispettivamente, può ad esempio rilasciare ∆ph secondo le seguenti regole:
• Regola I: ∆ph = const · I(vi )
• Regola II: ∆ph = const · |I(vi ) − I(vj )|
Pn0
I(vl )
• Regola III: ∆ph = const · l=1 0
n
dove n0 è il numero totale di voxel vicini al punto di partenza: quindi n0 = n + 1 = 27
dal momento che, come è stato detto in precedenza, vengono presi in considerazione
solo i 26 voxel vicini.
La Regola I, in cui la formica rilascia una quantità di feromone proporzionale all’intensità del voxel, è usata per la segmentazione di oggetti su uno sfondo (per esempio
il caso di CT polmonare); la Regola II può essere usata per l’individuazione del
bordo (per esempio, la ricerca della pleura nelle CT polmonari), mentre la Regola
III smorza le fluttuazioni di intensità e può, pertanto, essere usata per segmentare
oggetti in un ambiente molto rumoroso.
Dopo la deposizione di feromone, sle formiche si muovono verso il voxel di destinazione selezionato.
4.2.4 Ciclo di vita: riproduzione e morte
4.2.4
52
Ciclo di vita: riproduzione e morte
Le formiche vivono per un tempo finito, come tutti gli esseri viventi. Il ciclo di vita
è regolato da un parametro chiamato energia, che è assegnato alla nascita da un
valore di partenza:
ε0 = 1 + α
(4.6)
Ad ogni passo la variazione di energia per una formica k tiene conto delle proprietà
dell’ambiente, definite dalla quantità di feromone depositata ∆kph per ogni ciclo e
dalla media della quantità di feromone per ogni passo che la colonia ha depositato
dall’inizio dell’evoluzione, usato come fattore di normalizzazione (< ∆ph >): la figura 3.3 mostra che la media, usata per la normalizzazione, converge ad un fattore
costante ed è molto più stabile rispetto alla media per ciclo.
Figura 4.3: Quantità media di feromone rilasciata in funzione del numero di cicli: la linea
piena rappresenta i cicli, mentre la linea tratteggiata la media. La media di quantità rilasciata
è molto più stabile, come se la colonia si evolve ed è quindi adatto per essere utilizzata come
fattore di normalizzazione.
Al tempo t + 1 l’energia sarà:
εkt+1 = εkt + α ·
4.2.5
∆kph
< ∆ph >
−1
(4.7)
Comportamenti anomali
Le formiche possono deviare la loro direzione, assicurando sempre l’obiettivo finale, attraverso i cosidetti comortamenti devianti, che si hanno quando il voxel
ha raggiunto il numero massimo di visite oppure quando la quantità massima di
feromone.
4.2.6 Implementazione del modello
53
In questo modello i comportamenti anomali possibili sono i seguenti (descritti anche
dalla figura 3.4):
• Cattura: una formica muore quando sceglie un voxel il cui numero di visite
ricevute è superiore alla soglia o la cui quantità di feromone è sopra il limite;
• Raggiungimento del confine: una formica muore, quando raggiunge il bordo
dell’ambiente in 3D;
• Salto: se una formica è completamente circondata da altre formiche, può saltare
nella direzione in cui andrebbe se non ci fossero altre formiche intorno.
Figura 4.4: Comportamento devianti: a) Eliminazione; b) Salto; c) Raggiungimento del
confine; d) Cattura.
4.2.6
Implementazione del modello
Channeler Ant Model, il cui diagramma di flusso è mostrato in figura ??, è usato per
la ricostruzione dell’albero bronchiale e vascolare su CT tridimensionali. L’output del
modello CAM non è un’immagine segmentata, ma piuttosto una mappa di feromone,
che può essere considerata come un’effettiva pre-elaborazione del volume in 3D per
la segmentazione reale.
L’input dell’algoritmo sono:
1. Immagine iniziale;
2. Nv : numero massimo di visite in ciscun voxel;
3. NA : numero iniziale di formiche nella colonia;
4.2.6 Implementazione del modello
54
4. vAH : posizione del fomicaio (per esempio, il voxel dove la colonia inizia la
costruzione del nido);
5. Tmax : massima quantità di feromone consentita in un voxel.
L’output è:
1. Mappa di feromone, cioè una matrice in 3D che memorizza la quantità di
feromone rilasciato dalle formiche in ogni voxel vi dell’immagine originale.
Figura 4.5: Diagramma di flusso del Channeler Ant Model
Il modello è sviluppato come segue:
• Inizialmente, al tempo t = 0, tutti i voxel sono raggiungibili e non contengono
feromone: non è disponibile nessuna informazione sull’evoluzione della colonia;
• Viene scelta la posizione del formicaio, che appartiene alla struttura che deve essere segmentata ed N0 = 26, sono le formiche che si muovono in ogni
direzione con un valore di energia predefinito (α);
• Le formiche si muovono nell’ambiente secondo le regole descritte in precedenza,
depositando feromone;
• La regola di selezione di feromone è scelta con lo scopo di segmentare regioni
con un alto valore d’intensità, quindi considerando la regola I: ∆ph = const ·
(I(vi ) − I0 ), dove I(vi ) è l’intensità del voxel dove si trova la formica e I0
l’intensità minima dell’immagine;
4.3 Analisi del modello
55
• Il ciclo finisce quando tutte le formiche della colonia hanno effettuato uno
spostamento;
• Quando il ciclo è completato, il valore di energia viene aggiornato e comparato
con i valori di soglia εD e εR ;
• La colonia si evolve fino a quando sono vive le formiche, oppure fin quando il
numero di cicli predefinito è completato;
• Quando l’evoluzione della colonia si ferma, la mappa di feromone ottenuta
viene memorizzata e analizzata.
4.3
Analisi del modello
4.3.1
Immagini artificiali
L’ attività della colonia, sviluppata attraverso l’algoritmo CAM, è visualizzabile
attraverso la mappa di feromone del volume analizzato in 3D che, è successivamente
usata come punto di partenza per la segmentazione di strutture. Per valutare le
prestazioni del modello, è importante studiare i risultati su un insieme di immagini
di oggetti 3D generati artificialmente; si possono dividere in tre gruppi differenti, con
complessità crescente, data dalla loro forma e le proprietà note (quali la distribuzione
dell’intensità, livello di fondo):
• Classe A: oggetti con intensità omogenea (I = I0 ) e livello di fondo nullo;
• Classe B : oggetti con intensità eterogenea estratta da una gaussiana con media
µl e deviazione standard σl , e livello di fondo nullo;
• Classe C : oggetti con intensità eterogenea estratta come per oggetti di classe
B e fondo di rumore estratto da una gaussiana con media µnoise e devianzione
standard σnoise .
Figura 4.6: Forme di oggetti artificiali usate per la validazione del modello: a) toroide; b)
nodo; c) autostrada; d) yoyo; e) scala; f) ponte a 1 braccio; g) ponte a due bracci.
4.3.2 Parametri di ottimizzazione
56
Le forme implementate sono selezionate per l’analisi del comportamento del modello
in differenti condizioni: come si può vedere dalla figura 3.6 l’autostrada che le formiche realmente percorrono in 3D; l’analisi di canalizzazzione di una scala, di un nodo,
di una toroide 2 e di uno yoyo, oggetti che cambiano continuamente orientazione; il
ponte definisce la reazione della colonia ad una struttura con rami sottili. Inoltre,
analizzando un oggetto in 2D (come per esempio uno snake che si può osserevare
nella figura 3.7), si dimostra che le performance del modello in 2D e in 3D sono
comparabili, come ci si aspettava.
Figura 4.7: Snake utilizzato nella validazione del modello.
4.3.2
Parametri di ottimizzazione
L’evoluzione della colonia è una funzione che tiene conto di diversi paramentri,
descritti di seguito:
• Una formica calcola la quantità di feromone da rilasciare nel voxel tramite
l’equazione 3.3 contenente due parametri β e δ. Sulla base di uno studio [35] ,
questi due parametri sono fissati a β = 3.5 e δ = 0.2;
• Una formica deposita una certa quantità di feromone nel voxel secondo l’equazione 3.4. La quantità minima di feromone, che una formica lascia dietro di sé
e che assicura solo che un voxel è stato visitato, deve essere un valore piccolo
(η): esso è definito in modo che sia sempre trascurabile rispetto alla quantità
di feromone che si ha in zone con intensità maggiore di zero; si fissa η = 0.01.
• La formica aggiorna l’energia secondo le equazioni 3.6 e 3.7: α è una costante
che assicura che ogni formica faccia almeno un piccolo movimento prima di
morire;
• Il fattore di scala, Hf ac , determina quanto velocemente l’energia di una formica
aumenta o diminuisce, decidendo quanto rapidamente avvengono riproduzione
2
Toroide o toro è una superficie a forma di ciambella; può essere ottenuta facendo ruotare una
circonferenza intorno ad un asse di rotazione appartenente allo stesso piano, ma disgiunto da esso.
4.4 Osservazioni sull’algoritmo CAM
57
e morte ed è definito in termini di proprietà locali dell’ambiente. Un problema
è la necessità di trovare un equilibrio soddisfacente tra due differenti effetti: la
capacità di esplorare volumi liberi di feromone e la minimizzazione del cosidetto tunnelling, che consente alle formiche di raggiungere volumi di intensità
elevata, non connessi a quello in cui si trovano inizialmente. Per esempio, nel
caso della toroide, le bobine dell’oggetto sono cosı̀ vicine che, a meno che i parametri del modello siano correttamente sintonizzati, possono essere raggiunti
dalle formiche che attraversano un volume vuoto (con bassa intensità).
Il numero medio di passi che una formica può fare, in una regione libera di
feromone, è dato da:
(εR − εD )
(4.8)
α
se si trascura il fattore ∆ph /∆ph . Per minimizzare il tunnelling, Nsteps deve
Nsteps =
essere basso. Inizialmente, in questo studio i valori di εD , εR e valgono 1.0,
1.3, 0.2 rispettivamente.
La limitazione del numero di visite che un voxel può ricevere (NV ), introdotto affinché la colonia si sposti lungo le strutture segmentate, non è considerato un parametro
del modello. Il limite superiore definisce la velocità con cui la struttura è segmentata, non la capacità delle formiche di segmentarla. Il limite inferiore deve tener
conto che il numero di visite che un voxel può ricevere è relativo anche all’analisi dei
vicini: poiché la scelta della destinazione si basa sulla probabilità, NV deve essere
grande per consentire un numero statisticamente significativo di mosse in tutti i
voxel vicini di qualsiasi punto visitato. In altre parole, NV deve essere inversamente
proporzionale all’intensità media dei volumi circostanti, in modo che in un area con
intensità bassa sia consentito un numero di visite elevato. Per esempio con NV compreso tra l’intervallo [40-120], un generico spostamento da vi a vj avviene circa 1,5
(4,5) volte in regioni ad alta (bassa) intensità, che si rivela essere sufficiente per una
segmentazione soddisfacente. Per ogni immagine data, l’intensità media dell’intorno
di ogni voxel va da un valore medio minimo < I >min ad una valore medio massimo
< I >max , ed il numero massimo di visite per un voxel è normalizzato come segue:
NV = 40 + 80
4.4
< I > − < I >max
< I >min − < I >max
(4.9)
Osservazioni sull’algoritmo CAM
L’algoritmo CAM è stato sviluppato, inizialmente, su oggetti artificiali in 3D appartenenti alle tre classi A, B, C. La scelta di simulare le proprietà degli oggetti
(intensità e fondo) è fatta per validare le prestazioni l’algoritmo in funzione del-
4.4 Osservazioni sull’algoritmo CAM
58
l’intensità degli oggetti (media e deviazione standard) e fluttuazione del fondo (per
esempio, il rumore).
Ogni volta che la colonia completa il ciclo di vita, la mappa di feromone è disponibile
per l’analisi, insieme alla mappa del numero di visite ricevute da ogni voxel: la figura
?? mostra alcuni esempi di fette di oggetti in 2D di forma differente, presi dalla classe
C.
Figura 4.8: Modello CAM applicato ad oggetti di classe C. a) fetta in 2D dell’immagine
originale; b) mappa delle visite nei voxel; c) mappa di feromone. Dalla prima riga: autostrada,
toroide, yoyo, ponte a 2 bracci e snake.
L’evoluzione della popolazione è un indicatore interessante del loro comportamento
dinamico durante l’esplorazione dell’immagine: la figura ?? mostra l’evoluzione di
un insieme di oggetti appartenenti alla classe C. Comunque, quando il formicaio
si trova lungo una delle strutture più sottili, il picco compare più tardi, perché
la crescita della popolazione è impedita fin quando non si raggiungono strutture
più spesse dell’oggetto. La durata della vita della popolazione dipende dalla forma,
dalla complessità e dalla posizione del formicaio. Una tendenza media può essere
4.4 Osservazioni sull’algoritmo CAM
59
vista se gli stessi oggetti di classe A, classe B e classe C vengono messi a confronto:
l’estinzione è leggermente più veloce per gli oggetti con intensità uniforme (classe
A), mentre ci vuole un pò di più (circa il 10% in più di cicli), quando l’intensità non è
uniforme (classe B ) e un altro 5-10% in più quando viene aggiunto un rumore di tipo
gaussiano (classe C ). Inoltre, il numero medio di formiche nella colonia aumenta del
10-15% quando si aggiunge il rumore.
I risultati ottenuti sono differenti rispetto a quelli che ci si aspettava dalle regole del modello. La media della colonia della popolazione dipende, essenzialmente,
dai livelli di feromone, che a sua volta dipende dall’intensità dei voxel: il cambio
da intensità uniforme a variabile causa un aumento più lento della popolazione, e
pertanto richiede un numero elevato di cicli per completare la segmentazione.
L’aggiunta del rumore di fondo aumenta la vita media delle formiche, poiché piccole
quantità di feromone possono essere rilasciate anche al di fuori dell’oggetto e questo
provoca una diminuizione dell’energia più lenta, trasformandosi in un valore di vita
media delle formiche elevato.
L’evoluzione della colonia è anche funzione della posizione del formicaio: dipendono dalle proprietà locali dell’oggetto, il numero di formiche nella colonia mostra
differenti tipologie, come si può vedere dalla figura 3.9.
Figura 4.9: Evoluzione della colonia: la variazione della popolazione per la segmentazione
della toroide e del ponte ad un braccio in funzione del numero di cicli. Il modello standard
ha un andamento triangolare, ad eccezione del ponte ad un braccio, dove la locazione del
formicaio, lungo il ponte sottile, limita lo sviluppo della popolazione fino a quando non si
raggiunge la parte più spessa.
Il picco della popolazione è raggiunto quando vengono esplorati i bracci sottili delle
strutture. Quando il formicaio si trova sul ponte sottile che collega le due braccia, la
popolazione raggiunge un plateau corrispondente al ponte di esplorazione e aumenta,
nuovamente, quando le formiche raggiungono le braccia.
4.4.1 Segmentazione dell’oggetto
4.4.1
60
Segmentazione dell’oggetto
Come già osservato, la colonia di formiche si evolve fino all’estinzione, generando
una mappa di feromone che permette la conoscenza globale dell’ambiente. Al fine
di valutare le prestazioni dell’algoritmo CAM per quanto riguarda la segmentazione
dell’oggetto, deve essere considerata una definizione di quando il voxel è considerato
parte dell’oggetto. Si sceglie di usare una condizione di inclusione che, applicata
alla mappa di feromone, genera un’immagine binaria: quando un voxel contiene una
certa quantità di feromone, predefinita da una soglia (P hth ), è classificato come
segmentato.
Pertanto, i risultati dipendono dalla soglia e, in pricipio, dalla forma e dalla classe
di appartenenza.
L’analisi seguente mostrerà che CAM fornisce risultati uniformi, per forme e proprietà dell’immagine diverse, nonché la possibilità di definie una soglia comune per
l’analisi della mappa di feromone, che lo rende adeguato per l’analisi di strutture
complesse. Per quantificare le prestazioni del modello nella segmentazione vengono
definiti i seguenti parametri:
• Sensibilità: S = NR /NO rapporto tra il numero di voxel correttamente segmentati e il numero di voxel dell’oggetto originale;
• Livello di Esplorazione: E = NV /NO rapporto tra il numero di voxel segmentati e il numero di voxel dell’oggetto originale;
• Contaminazione: C = NC /NO rapporto tra il numero di voxel segmentati che
non appartengono all’oggetto originale e il numero i voxel dell’oggetto originale.
In accordo con le definizioni appena descritte si ha:
C = (NV − NR )/NO = E − S
(4.10)
S, E e C sono funzioni del valore di soglia con cui viene analizzata la mappa di
feromone: come si può vedere dalla figura 3.10 la prestazione del modello è indipendente dalla forma dell’oggetto; quindi CAM è un modello abbastanza generale per
segmentare oggetti di forme diverse.
Il comportamento dell’algoritmo CAM in funzione del rumore in una data intensità
media, mostra che è possibile definire una serie di valori di soglia di feromone per
i quali la segmentazione è pienamente soddisfacente, a meno che i livelli di rumore
sono molti elevati. Inoltre il livello di feromone rispetto al numero di visite per voxel,
sono correlate in modo diverso per l’oggetto e per lo sfondo: pertanto, nel caso in
cui i valori di rumore sono elevati, sarebbe possibile definire una regola ancora più
efficace per la selezione dei voxel.
4.4.1 Segmentazione dell’oggetto
61
Figura 4.10: Studio della contaminazione in funzione della sensibilità su oggetti di forme
diverse.
Figura 4.11: Correlazione tra la Sensibilità e la Contaminazione per l’oggeto autostrada
di classe C a differenti livelli di rumore, per l’algoritmo CAM con una semplice analisi
della soglia della mappa di feromone e un algoritmo semplice per la soglia sull’intensità
dell’immagine.
Capitolo 5
Analisi
L’algoritmo CAM è stato sviluppato per essere usato su un sistema di rivelazione
automatica di noduli polmonari in CT. In particolare, l’algoritmo CAM è responsabile della parte riguardante la segmentazione dell’albero bronchiale e vascolare nel
polmone, per rimuoverlo dall’immagine originale e, nella ricerca di noduli, ridurre il
numero di falsi positivi.
Come già accennato in precedenza, i database utilizzati per l’applicazione dell’algoritmo su CT polmonari sono riportati in tabella ??.
A ciascun caso è associata una refertazione da uno o più radiologi. E’ un file in
cui vengono indicati rispettivamente: il numero del nodulo, le coordinate del centro
(x,y,z), il raggio e la rilevanza (1, indica nodulo rilevante e 2, nodulo non rilevante).
Su ogni database è stato applicato l’algoritmo CAM seguendo i passaggi riportati
nei paragrafi successivi.
Figura 5.1: Refertazione del radiologo
5.1
Considerazioni iniziali
Lanciando l’algoritmo CAM per la ricostruzione dell’albero bronchiale e vascolare si
vede che è molto più complesso rispetto alla ricostruzione di oggetti artificiali, poiché
le CT sono immagini più grandi, con elevato rumore e con distribuzioni d’intesità
molto eterogenee. La segmentazione del polmone è fatta grazie all’ausilio dell’algoritmo di RG (descritto in precedenza), dove l’output è l’immagine dei polmoni,
destro e sinistro. La figura 4.2 mostra la fetta di un’immagine originale di CT con
62
5.1 Considerazioni iniziali
63
la relativa segmentazione in 2D. Mentre l’immagine 4.3, non è altro che l’insieme di
tutte le segmentazioni in 2D.
Figura 5.2: 3 esempi di una slice di CT con la rispettiva segmentazione: a) Immagine
originale; b) Immagine segmentata.
Figura 5.3: Differenti punti di vista di un volume in 3D segmentato.
Le formiche vengono lanciate, partendo da un punto (situato solitamente nell’ilius
pulmonis); eseguendo la segmentazione su un certo numero di CT, si nota che uno
dei problemi è dovuto alle strutture molto eterogenee, presenti nell’immagine; questo
può essere visto anche dalla figura 4.4 in cui, la colonia di formiche si concentra
maggiormente in zone dove non c’è niente da ricostruire.
Figura 5.4: Primo problema: a) slice della CT originale; b) numero di visite per voxel; c)
mappa di feromone
Quest’effetto è una diretta conseguenza del fatto che il numero massimo di formiche
generate ad ogni riproduzione, G, è considerato costante per tutta la durata della
colonia. Quando le formiche occupano grandi aree, come albero bronchiale oppure
5.2 Mappa di feromone
64
vene (che fanno parte dell’albero vascolare), dove ci sono già state, possono dare vita
al massimo a 26 altre formiche: la zona è cosı̀ ricostruita e la colonia si muove verso
altre destinazioni. Sfortunatamente però, questo diventa un problema quando le
formiche raggiungono strutture molto sottili, come i capillari, che hanno un diametro
pari a circa due voxel (1mm circa).
Quando le formiche raggiungono un valore di energia pari a quello di riproduzione e
creano una prole che è data da : Nof f spring = G − Nneigh , dove G = 26 e Nneigh è il
numero di voxel vicini pronti ad ospitare una formica, ovvero non occupao da altre
formiche.
Un altro problema può essere osservato nella figura ??: la colonia può ricostruire
anche parte della pleura. In questo modo la formica include nella mappa di feromone
i noduli che sono attaccati alla pleura polmonare. Il processo di segmentazione inizia
nelle vicinanze del punto in cui i bronchi entrano nei polmoni e si estendono su tutta
l’immagine 3D.
5.2
Mappa di feromone
Anche se non è facile definire le prestazioni quantitative dell’algoritmo CAM applicato alle CT polmonari, è comunque interessante valutare il comportamento da
un punto di vista qualitativo. Analizzando una CT, il formicaio si trova alla radice dell’albero bronchiale e vascolare, e l’ambiente della colonia è definito dai voxel
accettati nella regione di segmentazione del volume polmonare.
htemp
inputs.fAveInt
Entries
Mean
RMS
300
3057
-406.1
82.81
250
200
150
100
50
0
-600
-400
-200
0
200
400
inputs.fAveInt
Figura 5.5: Istogramma dell’intensità media.
I polmoni, destro e sinistro, sono analizzati separatamente, dal momento che per definizione sono topologicamente disconnessi. La regola di rilascio di feromone è definita
in modo tale che la sua diffusione sia proporzionale alla differenza tra l’intensità del
voxel e l’intensità minima del volume polmonare.
La maggior parte dei voxel giace sul fondo, perchè non viene visitato dalle formiche, e
non contiene feromone. Per alcuni di questi, l’intensità può avere un valore elevato:
5.2 Mappa di feromone
65
questi voxel sono i candidati come appartenenti ad un nodulo, che spesso non è
connesso con l’albero bronchiale e vascolare.
Dopo il ripristino dei voxel con un valore di feromone sopra soglia, l’immagine originale si trasforma in immagine, propriamente detta sottratta, in cui il nodulo da
rivelare è più facile da individuare senza falsi risultati.
Figura 5.6: Immagine originale; numero di visite; immagine sottrata.
L’immagine sottratta diviene l’oggetto iniziale nella fase che cerca i candidati noduli
e li classifica.
Una volta che l’albero bronchiale e vascolare sono rimossi, inizia la ricerca dei noduli;
anche questo passo è fatto dalle formiche. Il processo è semplice: la regina scansiona
tutta l’immagine sottratta; se viene trovato un voxel con alta intensità, si inserisce un
formicaio e comincia la segmentazione; dopo, all’estinzione della colonia, l’oggetto
viene memorizzato e rimosso dall’immagine. La regina va avanti fin quando non
vengono trovati altri oggetti.
La prima analisi dei noduli e di altri artefatti si fa in base alla grandezza, e più precisamente al numero di voxel che l’oggetto contiene, ma questa non è una condizione
sufficiente perchè, piccoli noduli possono essere confusi con sezioni di capillari in
2D che le formiche non sono in grado di ricostruire; ecco perchè molti sistemi CAD
escludono piccoli candidati noduli che hanno una grandezza inferiore ai 5mm. Un
problema, riguardante le dimensioni, è relativo anche alle strutture che hanno una
forma allungata, che sono capillari non riconosciuti a causa dei limiti dell’algoritmo
CAM. Anche se queste strutture non sono noduli, diventano dei validi candidati
quando viene presa in considerazione solo la dimensione.
Cosi devono essere considerate altre caratteristiche come Volume V , espresso in
numero di voxel, Sfericità S, definita come il rapporto tra V , volume dell’oggetto, e
VS , volume di una sfera più piccola che contiene l’oggetto intero, entrambi misurati
in voxel, Eccentricità 1 .
1
Eccentricità, e, è un parametro numerico che si può associare ad una sezione conica; nel caso di
un’ellisse può essere una misura intuitiva di quanto il suo aspetto si discosta da una circonferenza.
5.3 Estrazione delle features
66
Il risultato di questa prima analisi è una lista di regioni di interesse individuate dal
CAD, indicate in un file nella stessa modalità di scrittura usata dai radiologi nella
refertazione (mostrata in figura 4.7).
Figura 5.7: Scrittura delle ROI individuate dal CAD: coordinate, raggio, sfericità e volume
5.3
Estrazione delle features
Dopo aver ottenuto la lista di CAD findings per ogni CT, attraverso un codice vengono analizzate per poi individuarne le varie caratteristiche. Come detto in precedenza
le proprietà considerate sono:
• volume;
• intensità media e intensità massima;
• sfericità;
• eccentricità;
• ellitticità.
Dalle refertazioni del radiologo e le refertazioni del CAD si ottengono i falsi positivi, ossia quelle regioni che il CAD individua ma che non sono ritenuti noduli, dal
radiologo, e le regioni che sono indicate da entrambi (CAD e radiologo). Il risultato
si può osservare nelle figure 4.8 e 4.9, in cui vengono riportate tutte le regioni di
interesse, sulla base di alcune caratteristiche.
Il risultato riassuntivo di questo primo passo di analisi, per ogni database, è mostrato
nella tabella 4.1, dove è indicato il numero di regioni di interesse individuate dal CAD
e dal radiologo, e il numero di falsi positivi (FP). Sulla base di questi primi risultati,
l’analisi ci ha portato a soffermarci sulla posizione di queste regioni.
5.4
Analisi della posizione delle ROI
Il primo passo, dopo aver ottenuto un elevato numero di regioni di interesse, è
stato l’analisi della posizione, in quanto le parti principali dell’algoritmo sono due:
Infatti le circonferenze hanno eccentricità nulla (e = 0), quindi le ellissi più simili hanno valori bassi,
mentre quelle via via più allungate hanno valori progressivamente maggiori (sempre inferiori a 1)
5.4 Analisi della posizione delle ROI
hsize
Volumen (mm^3)
Entries
3
hImax
Int. max
38
Mean
74.53
RMS
210.2
Entries
3
67
hIAve
Average Int.
38
Mean
-19.11
RMS
96.24
Entries
3
hIStd
Int St. Des.
38
Mean
-216.4
RMS
75.66
Entries
9
Sphericity
38
Mean
114.9
RMS
78.89
hEfer
Entries
3
38
Mean
0.6058
RMS
0.3713
8
2.5
2.5
2.5
2
2
2
1.5
1.5
1.5
1
1
1
0.5
0.5
0.5
2.5
7
6
2
5
1.5
4
3
1
2
0.5
1
0
0 200 400 600 800 100012001400160018002000
0
-600
hSizeEfer
Size vs Sphericity
Entries
1
Mean x
-200
0
200
400
0
-600
600
hEllip
Ellipticity
38
Entries
2.842
Mean y 0.6747
0.9
-400
4
-400
-200
0
200
400
hElli3
Ellipticity3p
38
Mean
0.5294
RMS
0.3431
0
-600
600
Entries
8
-400
-200
0
200
400
hEccen
Eccentricity
38
Mean
0.8103
RMS
0.6828
0
0
600
Entries
4
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
Eccentricity3p
38
Mean
0.823
RMS
0.1401
1
hEcce3
Entries
3
38
Mean
0.6507
RMS
0.2856
3.9971.8
RMS x
RMS y 0.3323
3.5
7
3.5
0.8
1.6
0.7
1.4
3
6
3
0.6
1.2
2.5
5
2.5
0.5
1
2
4
2
0.4
0.8
1.5
3
1.5
0.3
0.6
1
2
1
0.2
0.4
2.5
2
1.5
1
0.5
0.1
0
0
0.2
5
10
15
20
25
0
30
0.5
0
0
1
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
0.5
0
0 0.5
1
1 1.5
2
2.5
3 3.5
4 4.5
0
0
5
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
1
0
0
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
1
Figura 5.8: Risultato della funzione checkROIsHistoMG() sul database ANODE09: regioni
individuate sia dal CAD che dal radiologo.
Volumen (mm^3)
100
hImaxFP
Int. max
hsizeFP
Entries
Entries
2076
Mean
41.93
RMS
79.83
60
hIAveFP
Average Int.
2076
Mean
-142.4
RMS
80.34
Entries
90
2076
Sphericity
hEferFP
Entries
2076
Entries
-301.3
Mean
75.41
Mean
0.1436
RMS
59.66
RMS
17.71
RMS
0.1716
80
50
hIStdFP
Int St. Des.
Mean
600
300
500
250
400
200
300
150
200
100
2076
70
80
60
40
50
60
30
40
40
30
20
20
20
10
100
50
10
0
0 200 400 600 800 100012001400160018002000
0
-600
hSizeEferFP
Size vs Sphericity
Entries
1
-400
-200
0
Ellipticity
600
Entries
2076
Mean y 0.1451
400
hEllipFP
Mean x 4.6735
0.9
200
Mean
RMS
400
RMS y 0.1721
-400
-200
0
200
400
600
hElli3FP
Ellipticity3p
2076
Entries
0.09667
0.1306
0
-600
-400
-200
0
200
0.5939
RMS
0.6421
400
600
hEccenFP
Eccentricity
2076
Mean
500
4.5
3.4
RMS x
0
-600
Entries
Mean
0
0
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
Eccentricity3p
2076
0.6395
RMS
Entries
160
0.118
1
hEcce3FP
2076
Mean
0.2205
RMS
0.2515
90
140
350
0.8
4
0.7
3.5
300
0.6
3
250
80
120
400
70
60
100
50
80
300
0.5
2.5
0.4
2
0.3
1.5
0.2
1
0.1
0.5
200
40
60
200
150
30
40
100
0
0
5
10
15
20
25
30
0
20
100
50
0
0
20
10
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
1
0
0 0.5
1 1.5
2
2.5
3 3.5
4 4.5
5
0
0
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
1
0
0
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
1
Figura 5.9: Risultato della funzione checkROIsHistoMG() sul database ANODE09:
distribuzione dei falsi positivi.
Database
CTs
ROIs
Match
CAD ROIs
FP/image
LIDC
85
39
30(76.9%)
40595
483
ANODE09
5
39
38(97.4%)
3100
612
GStest
20
39
37(94.9%)
23638
1180
Tabella 5.1: Tabella
5.4 Analisi della posizione delle ROI
68
la segmentazione del bordo e quella dell’albero bronchiale e vascolare (fatto dalle
formiche).
Ogni ROI è individuata dalle coordinate (x, y, z) e dal raggio, ed è stata calcolata
la distanza dal bordo (o cage) che ha coordinate (x0 ,y0 ,z0 ) e la distanza dal centro
del volume polmonare (xcenter ,ycenter , zcenter ). Ottenute dal semplice calcolo della
distanza matematica:
DistF romCage =
DistF romCenter =
p
(x − x0 )2 + (y − y0 )2 + (z − z0 )2
p
(x − xcenter )2 + (y − ycenter )2 + (z − zcenter )2
(5.1)
(5.2)
Dal calcolo di queste distanze si ottiene la distribuzine della posizione delle ROI,
come di può vedere dalle figure riportate di seguito:
htemp
Entries
3057
Mean
156.4
RMS
43.86
inputs.fDistFromCentre3D
100
80
60
40
20
0
50
100
150
200
250
300
inputs.fDistFromCentre3D
Figura 5.10: Distribuzione delle regioni di interesse in base alla distanza dal centro.
Nella figure è riportato un esempio di distribuzione di ROI (per il database ANODE09), calcolate tramite l’equazioni 4.1 e 4.2. Da questo grafico, si può agire in due
modi differenti:
• Se la maggior parte di ROI si trova verso il centro, allora si cerca una modifica
nell’algoritmo CAM, nell’ottimizzazione di alcuni parametri, come l’energia α;
• Se vi sono molte ROI sullo zero, allora si cerca di migliorare il bordo, ovvero
l’algoritmo di segmentazione.
5.4.1 Correzione dell’algoritmo
69
htemp
Entries
3057
Mean
26.73
RMS
17.31
inputs.fDistFromCage3D
400
350
300
250
200
150
100
50
0
0
20
40
60
80
inputs.fDistFromCage3D
Figura 5.11: Distribuzione delle regioni di interesse in base alla distanza dal bordo.
5.4.1
Correzione dell’algoritmo
La prima correzione fatta sull’algoritmo è la modifica del parametro α che regola la
variazaione di energia e quindi aumenta la vita alle formiche.
Partendo dall’equazione ε0 = 1 + α la correzione è la seguente:
α=
(M axIntensity − M inIntensity)
(AverageIntensity − M inIntensity)
(5.3)
Questa correzione ha permesso alle formiche di arrivare maggiormente in rofondità
nell’albero brochiale e vascolare.
5.4.2
Match
Partendo dall’analisi delle distanze, è stata introdotta una funzione di match, per
valutare i risultati del CAD; inizialmente, l’analisi si basava sulla distanza tra i
baricentri delle ROI del CAD rapportate al raggio dei ROI del radiologo; successivamente, questa funzione è stata modificata, tenendo conto della sovrapposizione dei
voxel di ciascuna ROI del CAD con quelle del radiologo. Nella figura 4.12, la regione
in rosso è quella individuata dal CAD mentre il cerchio è il referto del radiologo;
come si può osservare la ROI del CAD comprende un maggior numero di voxel.
5.4.2 Match
Figura 5.12: Esempio di un nodulo indicato dal radiologo e dal CAD.
70
5.4.3 ANODE09
71
Sulla base di queste premesse, le distribuzioni ottenute sono riportate di seguito, per
ciascun database.
5.4.3
ANODE09
Il database ANODE09 è costituito da 5 CT con 39 casi, individuati dal radiologo.
Eseguendo l’analisi delle ROI trovate dal CAD quelle del radiologo, si ottengono i
seguenti risultati:
dfccrad3d_S
Distance from Centre vs Distance from Cage (RAD) 3D all (type 1)
300
Entries
39
Mean x
1
22.7
300
Entries
38
Mean x
2
22.1
Mean y 181.7
Mean y 182.9
0.9
RMS x 13.69
RMS x 13.341.8
RMS y 34.06
250
dfccrad3dmatch_S
Distance from Centre vs Distance from Cage (RAD) 3D matched (type 1)
RMS y 33.68
250
0.8
150
1
100
0
40
60
80
100
0.8
0.7
0.6
150
0.5
0.4
0.3
0.2
50
0.2
0
0
0
50
100
150
200
0.1
0
0
0
50
100
Figura 5.13: Anode09: distribuzione delle ROI significative (tipo 1) del radiologo. Il primo
riquadro indica tutte le ROI, il secondo quelle individuate anche dal CAD e il terzo le ROI
che il il CAD non ndividua.
5.4.4
LIDC
Il database LIDC è costituito da 85 CT con 149 casi, individuati dal radiologo.
Eseguendo l’analisi delle ROI trovate dal CAD quelle del radiologo, si ottengono i
seguenti risultati:
5.4.5
GStest
Il database GStest è costituito da 20 CT con 39 casi, individuati dal radiologo.
Eseguendo l’analisi delle ROI trovate dal CAD quelle del radiologo, si ottengono i
seguenti risultati:
0
0.4
0.1
20
00.9
RMS y
100
50
0
RMS x
0.6
0.2
0
-20
250
0.8
0.3
50
Mean y 136.2
1.2
0.4
100
1
Mean x 45.621
200
0.6
0.5
Entries
300
1.4
200
150
dfccrad3dnotmatch_S
1.6
0.7
200
Distance from Centre vs Distance from Cage (RAD) 3D Not matched (type 1)
150
200
5.4.5 GStest
72
Distance from Centre vs Distance from Cage (RAD) 3D all (type 2 and 3)
dfccrad3d_NS
Entries
300
Distance from Centre vs Distance from Cage (RAD) 3D matched (type 2 and 3)
31
1
Mean x 15.05
300
Mean y 185.9
RMS x 13.540.9
RMS y 45.59
250
0.8
0.7
0.7
200
200
0.6
0.5
0.6
150
0.6
0.5
0.4
100
150
0.4
100
100
0.3
0.2
0.3
0.2
0.2
50
50
0.1
0
-20
0.1
0
0
20
40
60
80
0.5
0.4
0.3
50
RMS y 30.77
250
0.8
0.7
150
13
Mean x 16.521
RMS x 10.270.9
0.8
200
Entries
300
Mean y 173.1
0.9
11.82
RMS y 40.54
250
dfccrad3dnotmatch_NS
Distance from Centre vs Distance from Cage (RAD) 3D Not matched (type 2 and 3)
18
Mean x 13.991
Mean y 178.5
RMS x
dfccrad3dmatch_NS
Entries
0
100
0.1
0
0
50
100
150
0
200
0
0
50
100
150
200
Figura 5.14: Anode09: distribuzione delle ROI non significative (tipo 2 e 3) del radiologo. Il
primo riquadro indica tutte le ROI, il secondo quelle individuate anche dal CAD e il terzo
le ROI che il il CAD non ndividua.
dfcccad3d
Entries
3057
Mean x
26.77
Mean y
156.2
10
RMS x
17.3
RMS y
43.56
Distance from Centre vs Distance from Cage (CAD) 3D all
300
250
dfcccad3dmatch_S
Entries
38
1
Mean x
22.86
Mean y
178
0.9
RMS x
13.84
RMS y
36.92
Distance from Centre vs Distance from Cage (CAD) 3D matched (type 1)
300
250
0.8
8
200
0.7
200
0.6
6
150
150
4
100
50
0.5
0.4
100
2
50
0
0
0.3
0.2
0.1
0
0
50
100
150
200
dfcccad3dmatch_NS
Distance from Centre vs Distance from Cage (CAD) 3D matched (type 2 and 3)
Entries
Mean x
Mean y
RMS x
RMS y
300
250
18
1
15.72
168.3
0.9
10.59
45.64
0.8
0.7
200
0
50
100
150
200
0
dfcccad3dnotmatch
Distance from Centre vs Distance from Cage (CAD) 3D not matched
Entries
Mean x
Mean y
RMS x
RMS y
300
250
3001
26.88
155.9
10
17.34
43.54
8
200
0.6
6
150
0.5
150
0.4
100
0.3
0.2
50
4
100
2
50
0.1
0
0
50
100
150
200
0
0
0
50
100
150
Figura 5.15: Anode09: distribuzione delle ROI significative (tipo1) e non significative (tipo
2 e 3) individuate dal CAD.
200
0
5.4.5 GStest
73
Distance from Centre vs Distance from Cage (RAD) 3D all (type 1)
Distance from Centre vs Distance from Cage (RAD) 3D matched (type 1)
300
Entries
148
Mean x
17.18
Mean y
250
2
14.64
RMS y
37.13
300
1.8
158
RMS x
Distance from Centre vs Distance from Cage (RAD) 3D Not matched (type 1)
dfccrad3dnotmatch_S
dfccrad3dmatch_S
dfccrad3d_S
250
1.6
Entries
100
Mean x
15.46
Mean y
159.2
RMS x
12.54
RMS y
40.12
3
2.5
300
250
Entries
48
Mean x
20.76
Mean y
155.5
RMS x
17.72
RMS y
29.78
2
1.8
1.6
1.4
200
1.4
200
2
200
1.2
150
1
1.2
150
1.5
150
1
0.8
100
0.8
100
1
100
0.6
0.6
0.4
50
0.4
50
0.5
50
0.2
0
-20
0
0
20
40
60
80
0.2
0
100
0
0
50
100
150
0
200
0
0
50
100
150
200
Figura 5.16: LIDC: distribuzione delle ROI significative (tipo 1) del radiologo. Il primo
riquadro indica tutte le ROI, il secondo quelle individuate anche dal CAD e il terzo le ROI
che il il CAD non ndividua.
Distance from Centre vs Distance from Cage (RAD) 3D all (type 2 and 3)
300
250
Distance from Centre vs Distance from Cage (RAD) 3D Not matched (type 2 and 3)
Distance from Centre vs Distance from Cage (RAD) 3D matched (type 2 and 3)
dfccrad3d_NS
Entries
1620
Mean x
6.548
Mean y
151
RMS x
12.11
RMS y
38.72
dfccrad3dnotmatch_NS
dfccrad3dmatch_NS
10
300
6
9
250
8
300
413
Entries
1207
Mean x
7.987
Mean x
6.056
Mean y
155.9
Mean y
149.3
RMS x
11.47
RMS x
12.29
RMS y
38.82
RMS y
38.55
Entries
5
250
8
7
6
7
200
200
4
200
5
6
150
5
150
3
150
100
2
100
4
4
3
100
3
2
2
50
50
1
50
1
1
0
-20
0
0
20
40
60
80
100
0
0
0
50
100
150
200
0
0
0
50
100
Figura 5.17: LIDC: distribuzione delle ROI non significative (tipo 2 e 3) del radiologo. Il
primo riquadro indica tutte le ROI, il secondo quelle individuate anche dal CAD e il terzo
le ROI che il il CAD non ndividua.
150
200
5.4.5 GStest
74
Distance from Centre vs Distance from Cage (CAD) 3D all
Distance from Centre vs Distance from Cage (CAD) 3D matched (type 1)
dfcccad3d
Entries
45520
Mean x
19.99
Mean y
133.2
14.37
RMS x
RMS y
38.74
300
250
dfcccad3dmatch_S
Entries
100
Mean x
16.15
Mean y
158.8
12.78
RMS x
RMS y
40.43
300
100
250
80
200
2
1.8
1.6
1.4
200
1.2
60
150
150
100
50
1
0.8
40
100
20
50
0
0
0.6
0.4
0.2
0
0
50
100
150
200
dfcccad3dmatch_NS
Entries
413
Mean x
9.032
Mean y
155.5
10.38
RMS x
RMS y
39.01
250
50
100
150
200
0
Distance from Centre vs Distance from Cage (CAD) 3D not matched
Distance from Centre vs Distance from Cage (CAD) 3D matched (type 2 and 3)
300
0
7
dfcccad3dnotmatch
Entries
45116
Mean x
20.08
Mean y
133
14.36
RMS x
RMS y
38.68
300
6
250
100
80
5
200
200
4
60
150
150
3
40
100
100
2
50
0
0
50
100
150
200
1
50
0
0
20
0
50
100
150
200
0
Figura 5.18: LIDC: distribuzione delle ROI significative (tipo1) e non significative (tipo 2 e
3) individuate dal CAD.
Distance from Centre vs Distance from Cage (RAD) 3D all (type 1)
Distance from Centre vs Distance from Cage (RAD) 3D matched (type 1)
dfccrad3d_S
300
Entries
1
dfccrad3dnotmatch_S
300
Entries
38
1
33
250
Mean x 17.81
0.8
Mean y 177.5
250
0.7
0.6
150
0.5
0.4
100
0
80
100
0.4
0.3
0.2
0.2
50
0.1
60
0.5
100
50
40
150
0.3
0.2
20
0.6
0.4
0.3
50
0.7
200
0.6
100
0.8
RMS y 38.48
200
0.5
RMS x 13.02
0.8
RMS y 37.56
0.7
150
0.9
169
RMS x 22.26
RMS y 37.79
200
0.1
0
0
0
50
100
150
200
0.1
0
0
0
50
100
Figura 5.19: GStest: distribuzione delle ROI significative (tipo 1) del radiologo. Il primo
riquadro indica tutte le ROI, il secondo quelle individuate anche dal CAD e il terzo le ROI
che il il CAD non ndividua.
5
0.9
Mean y
RMS x 21.28
0
1
Entries
0.9
Mean y 170.2
0
-20
300
Mean x 17.62
Mean x 17.64
250
Distance from Centre vs Distance from Cage (RAD) 3D Not matched (type 1)
dfccrad3dmatch_S
150
200
5.4.5 GStest
75
Distance from Centre vs Distance from Cage (RAD) 3D all (type 2 and 3)
Distance from Centre vs Distance from Cage (RAD) 3D matched (type 2 and 3)
dfccrad3d_NS
300
Entries
250
Distance from Centre vs Distance from Cage (RAD) 3D Not matched (type 2 and 3)
dfccrad3dmatch_NS
3
300
80
Entries
Mean x 7.221
Mean x 10.45
Mean y 182.4
Mean y 179.1
RMS x 12.16
RMS y
2.5
250
dfccrad3dnotmatch_NS
300
2
Entries
152
Mean x 3.628
1.8
Mean y 186.1
250
RMS x 13.74
2.5
RMS x 8.834
1.6
RMS y 31.69
29.71
3
72
RMS y 26.86
1.4
200
200
2
200
2
150
1.5
100
1
1.2
150
1.5
150
1
0.8
100
100
1
0.6
0.4
50
0.5
50
50
0.5
0.2
0
-20
0
0
20
40
60
80
0
100
0
0
50
100
150
0
200
0
0
50
100
150
200
Figura 5.20: GStest: distribuzione delle ROI non significative (tipo 2 e 3) del radiologo. Il
primo riquadro indica tutte le ROI, il secondo quelle individuate anche dal CAD e il terzo
le ROI che il il CAD non ndividua.
Distance from Centre vs Distance from Cage (CAD) 3D all
Distance from Centre vs Distance from Cage (CAD) 3D matched (type 1)
dfcccad3d
Entries
26205
Mean x
23.6
Mean y
154.3
16.02
RMS x
RMS y
42.02
300
250
300
250
40
200
2
dfcccad3dmatch_S
Entries
33
Mean x
19.75
Mean y
168.5
RMS x
20.15
RMS y
36.83
50
1.8
1.6
1.4
200
1.2
30
150
150
20
100
50
1
0.8
100
10
50
0
0
0.6
0.4
0.2
0
0
50
100
150
200
dfcccad3dmatch_NS
Entries
Mean x
Mean y
RMS x
RMS y
250
50
100
150
200
0
Distance from Centre vs Distance from Cage (CAD) 3D not matched
Distance from Centre vs Distance from Cage (CAD) 3D matched (type 2 and 3)
300
0
3
80
11.33
178.8
12.89
31.47
300
2.5
250
200
2
200
150
1.5
150
100
1
100
dfcccad3dnotmatch
Entries
Mean x
Mean y
RMS x
RMS y
26092
23.64
154.2
16.01
42.03
50
40
30
20
50
0
0.5
0
50
100
150
200
0
10
50
0
0
50
100
150
Figura 5.21: GStest: distribuzione delle ROI significative (tipo1) e non significative (tipo 2
e 3) individuate dal CAD.
200
0
5.5 Classificazione
5.5
76
Classificazione
Lo sviluppo dell’algoritmo CAM, per la ricerca di noduli polmonari, presentato in
questo lavoro di tesi, è stato incentrato sulla fase di preprocessamento dele regioni
di interesse e sulla fase di classificazione.
Quest’ultima fase, è caratterizzata dall’implementazione e dall’addestramento di una
rete neurale, è stata sviluppata sulla base dei nuovi risultati ottenuti, in particolare
sulla scelta delle features. Infatti, è stata introdotta un’altra caratteristica, come la
distanza dal bordo, in quanto si è visto essere di elevata importanza.
Di seguito sono riportati i risultati ottenuti sui tre database.
Bibliografia
[1] I tumori in Italia, rapporto 2006. Associazione Italiana dei registri tumori
(AIRTUM), febbraio 2006.
[2] Tumore del polmone: annullate le differenze tra giovani uomini e donne, rapporto 2006. Associazione Italiana dei registri tumori (AIRTUM), febbraio
2006.
[3] Peto R., Lopez AD., Borehan J, et al. Mortality from smoking in developed
countries 1950-2000:indirect estimates from National Vital Statistics, Oxford
University Press, 2006.
[4] Nordquist LT, Simon GR., Cantor A. et al (agosto 2004) Improved survival in
never-smokers vs current smokers with primary adenocarcinoma of the Lung,
126(2): 347-351.
[5] http://www.cqa.polimi.it/attività/ambiente/, Il Radon. Politecnico di Milano.
[6] http://www.culcasg.org/. Articolo sull’incidenza e mortalità del carcinoma del
polmone. Siti Alliance for Lung Cancer Disease, Cuneo.
[7] Cheng YW, Chiou HL., Shew GT., The association of human papillomavirus
16/18 infection with lung cancer among nonsmoking Tawanese women. Cancer
Research 61(7):2799-2803.
[8] http://www.molecularlab.it/news. Tumore al polmone c’è chi è predisposto. Uno
studio multicentrico cerca di individuare le cause genetiche in malati che non
fumano.
[9] Robbins e Contran, Le basi patologiche delle malattie - Volume 2,7a edizione
Torino-Milano, Elsevier Masson, 2008.
[10] Travis LB, Devessa SS (gennaio 1995). Lung Cancer. Cancer 75:191-202.
[11] Bryant, Cerfolio (luglio 2007). Differences in epidemology, histology and survival
between cigarette, smokers and never-smokers who develop non-small cell lung
cancer. Chest 132:185-92.
77
BIBLIOGRAFIA
78
[12] De Vita, Hellman, Lawrence, De Vita, Hellman and Rosenberg’s Cancer:
Priciples Pratice of Oncology. 8a ed.Lippincott Williams Wilkins,2008.
[13] http://content.nejm.org/ The NEW ENGLAND JOURNAL of MEDICINE.
[14] http://jama.ama-assn.org/ The Journal of American Medical Association.
[15] http://www.ieo.it/ Lo studio Cosmos.
[16] http://www.r2tech.com/ ImageChecker.
[17]
[18] Taft R., Taylor A., Potential improvement in Breast Cancer Detection with a
Novel Computer Aided Detection System Applied Radiology, 30:25-28,2001.
[19] http://www.scanis.com/ MAMMEX TR.
[20] http://www.i-m3d.com
[21] http://www.medicsigh.com/
[22] Abstact SSM10-06: Colorectal Cancers: Effects of Cumputer-Aided-Detection
in Multirow Detector CT-Colonography [December 3,3-50 PMCST].
[23] M. N. Gurcan et al., Med.Phys. 29(11)2002 pp.2552-2558.
[24] Pubblicazione su WWW del DB Mammografico e Polmonare.
[25] Armato et al., Acad. Radiol., vol.14,pagg.1455-1463,2007.
[26] S.F.McNitt-Gray et al., Acad. Radiol., vol.14,pagg.1464-1474,2007.
[27] http://anode09.isi.uu.nl/.
[28] T. W. RIDLER and S. CALVARD, Picture thresholding using an iterative selection method’. IEEE Trans. on Systems, Man, and Cybernetics, 1978. SMC-8(8):
p. 630-632.
[29] SLUIMER et al., ‘Toward Automated Segmentation of the Pathological Lung
in CT’. IEEE Transactions on medical imaging, vol. 24, no. 8. August 2005.
[30] Bonabeau E., Dorigo M., Theraulz G., Swarm Intelligence, From Natural to
Artificial System. Oxford University Press, Oxford, 1999.
[31] Dorigo M., Maniezzo V., Colorni A. The Ant System: Optimization by a colony
of cooperating agents. IEEE Trans. Syst. Man Cybern. B, 26:29-41, 1996.
[32] http://www.swarm-bots.org.
BIBLIOGRAFIA
79
[33] Chialvo D., Millonas M., How swarms build cognitive maps. the Biology and
Technology of Intelligent Autonomous Agents, 144:139-450, 1995.
[34] Moore E.F. Gedanken experiments on sequential machines. Automata studies,
1956.
[35] Ramos V. e Almeida F. Artificial ant colonies in digital images habitats a mass
behaviour effect study on pattern recognition. In Proceedings of ANTS 200-2nd
Intenational Workshop on Ant Algorithms (From Ant Colonies to Artificial
Ants), pages 39-43. Belgium, 2000.