FISICA, FISIOLOGIA E LORO
APPLICAZIONE NEL KARATE
di Marco Malandrino
Presentazione
Diamo una definizione diversa di Karate, usando i numeri anziché le parole e
nozioni più avanzate di Anatomia, Fisiologia, Fisica e Biomeccanica.
L’ ambizione è quella di gettare le basi per un’ ulteriore futuro lavoro,
finalizzato alla ricerca della “Tecnica Perfetta” realizzata su un “Modello
Teorico di Riferimento”.
Esso rappresenta la base delle seguenti applicazioni: una diversa modalità per
“conoscersi, apprendere e migliorarsi”, nonché la possibilità di “utilizzare il
Karate con finalità Mediche” (correzione di Squilibri Muscolari e
Paraformismi, massima
riduzione possibile dei Microtraumatismi che
rappresentano la causa più frequente di incidenti e problematiche posturali nel
tempo, in ambito sportivo).
Era quindi un passaggio scritto che il percorso del karate avrebbe, prima o
dopo, incrociato, “Fisica e Medicina”, confrontandosi con esse e poi
fondendosi su una “piattaforma comune” di analisi ed elaborazione comune dei
risultati ottenuti singolarmente nel miglioramento si tecnico ma ancor più
importante preservando lo stato fisico nel tempo.
Permettendo così alla tecnica o meglio allo spirito di vivere in “Eterno”.
Ringraziamenti
A Samantha Vitanza, che mi ha affiancato nell’estrapolare, parti di fisica e
meccanica, che nello stato puramente formulistico, sarebbero state
incomprensibili.
Al M° Francesco Palandri, che da mille anni, con pazienza e parsimonia si
dedica ad insegnarmi “l’essenza del Do” attraverso il karate, il kobudo, il kungfu, il tai-chi, il kenjitsu e lo jujitsu.
II
Indice analitico
Autore :
Marco Malandrino
Cap. I
1 LA BIOMECCANICA NEL TEMPO E NELLA STORIA
Cap. II
2 LA BIOMECCANICA SPORTIVA
2.1 La Biomeccanica Qualitativa
2.1.1 Analisi pedagogica
2.1.2 Analisi biomeccanica qualitativa
2.2 Biomeccanica Quantitativa
2.2.1 Analisi quantitativa biomeccanica
Cap. III
3 LA FISICA PER LA BIOMECCANICA SPORTIVA
3.1 I concetti di base
3.1.1 Il sistema di riferimento
3.1.2 Grandezze Scalari e Vettoriali
3.1.3 Grandezze Scalari
3.1.4 Grandezze Vettoriali
3.2 La meccanica classica
3.2.1 La Cinematica
3.2.2 La Statica
3.2.3 La Leva
3.2.4 La Dinamica Traslazionale
3.2.4.1 I Tre Principi della Dinamica
III
Cap. IV
4 LA BIOMECCANICA ED IL MOVIMENTO DEL CORPO UMANO
4.1 La struttura del corpo umano
4.2 Baricentro e Piani di Simmetria
4.3 Elementi di Meccanica Articolare
Cap. V
5 LA BIOMECCANICA E LO SPORT
5.1 Analisi Biomeccanica generale e karate
5.2 Parametri Biomeccanici Fondamentali
5.2.1 Velocità di Movimento
5.2.2 Rapidità d’attacco e capacità di reazione
5.2.3 Posizione relativa dei corpi
.5.2.4 Definizione ottimale della Posizione relativa dei corpi in un kumite
5.3 Trasferimento dell’Energia per il III Principio della Dinamica
5.3.1 Equilibrio
5.4 Short distance
Cap. VI
6 L’ANALISI BIOMECCANICA NELL’EVOLUZIONE DELLA TECNICA
6.1 Analisi Biomeccanica della Tecnica di Kitsami-tsuki
6.1.1 Retropulsione o Caricamento
6.1.2 Traiettoria di Spostamento
6.1.3 Impatto
6.2 Analisi Biomeccanica della Tecnica di Mawashi-geri
6.2.1 Retropulsione o Caricamento
6.2.2 Traiettoria di Spostamento
6.2.3 Impatto
6.3 Conclusioni
IV
Cap. I
Colui che pratica karate non pratica semplicemente
uno sport ma è padrone di un’arte
1 LA BIOMECCANICA NEL TEMPO E NELLA STORIA
A cosa potrebbe venire utile la fisica o meglio la biobeccanica nel karate? Bisogna così
comprendere che nello karate, la “Tecnica Perfetta”, non è frutto di magia ma conseguenza della
conoscenza e dell’applicazione scientifica tesa sempre più ad ottenere il massimo rendimento
delle capacità fisiologiche e tecniche dell’uomo.
La biomeccanica è la scienza che, attraverso le sue varie branche, studia le leggi che regolano
l’origine, il mantenimento e lo sviluppo dell’azione motoria degli organismi viventi.
L’evoluzione della biomeccanica, volendo risalire alla trattazione del moto di Aristotele (fig. 1)
in cui la forza è proporzionale alla velocità ovvero F=kv, è stata lenta e si è evoluta di pari passo
con lo sviluppo della cultura scientifica nel mondo.
Sulla sua nascita ha avuto un’importanza decisiva lo sviluppo della meccanica e, soprattutto,il
nuovo indirizzo iniziato ai tempi di Galileo (fig. 3) e Newton (fig. 4) per cui la forza com’è noto
risulta F=ma.
V
Ma per convenzione, la nascita ufficiale come branca autonoma della scienza può senza dubbio
coincidere con la pubblicazione del “De motum animalium” 1680, di Giovanni, Francesco,
Antonio, Alfonso Borelli (fig. 5). In quest’opera l’autore per primo tentò di spiegare il
movimento del corpo umano, mediante l’applicazione delle leggi della statica e della dinamica
(fig. 6,7,8)
Nel corso degli anni, la biomeccanica generale ha riscosso notevoli successi nei più disparati
campi applicativi. Infatti, avendo questa scienza come oggetto principale di analisi l’uomo con le
sue caratteristiche e peculiarità.
Scopo precipuo della biomeccanica sportiva è quello di dare risposte ai seguenti tre problemi
fondamentali, intimamente correlati;
•
Valutazione funzionale dell’atleta
•
Individuazione della tecnica sportiva razionale
•
Perfezionamento della tecnica personale
VI
Cap. II
Colui che pratica karate non pratica semplicemente
uno sport ma è padrone di un’arte
2 LA BIOMECCANICA SPORTIVA
2.1 La Biomeccanica Qualitativa
La maggior parte del lavoro dell’allenatore nel campo della preparazione tecnica si basa
sull’analisi dell’esecuzione degli esercizi eseguiti dagli allievi. Quest’atteggiamento è talmente
ovvio che sarebbe difficile concepirne la mancanza durante le prove specifiche.
2.1.1 Analisi pedagogica
Intendiamo conglobare in questa classe, tutte le valutazioni degli esercizi tecnici che si basano
solo su scienze umanistiche e che non prevedono quindi lo studio quali-quantitativo delle forze in
gioco e dei consumi energetici associati.
In questo caso l’analisi dell’esecuzione degli esercizi si esegue, senza alcun impiego sostanziale
della biomeccanica e delle sue leggi.
2.1.2 Analisi biomeccanica qualitativa
Essa ha lo scopo di portare al miglioramento della tecnica personale o all’evoluzione migliorativa
di metodiche di allenamento tecnico dello sport.
Definiamo due differenti metodologie :
1.
fondamentale o di base – che ha come obbiettivo la comprensione della tecnica
osservata ed il suo miglioramento
2.
approfondita – utilizzando teorie logiche, comprendenti i dati derivati dalle scienze
affini.
Questo tipo di analisi è quella di maggior pertinenza negli sport di combattimento, karate.
Gli scopi di quest’ultima analisi, concernenti la preparazione tecnica di base :
1.
uso ottimale delle possibilità motorie dell’atleta
2.
revisione delle tecniche consolidate, degli esercizi e delle azioni con scopo di
aumentare la loro efficacia
3.
riconoscimento, determinazione e spiegazione degli errori motori
4.
ricerca delle vie e dei mezzi per evitare, prevenire e compensare gli errori motori
5.
selezione e costruzione degli esercizi efficaci per la preparazione, il
condizionamento e la strutturazione dei sistemi d’attacco e difesa
6.
acquisizione oggettiva delle informazioni concernenti l’esecuzione delle tecniche
VII
In conclusione è opportuno rilevare i principali benefici che produce una seria e regolare
applicazione dell’analisi biomeccanica qualitativa per gli insegnanti e gli atleti :
1.
aumento dell’efficacia dell’allenamento.
2.
approfondimento della comprensione motoria.
3.
accrescimento nell’atleta, della capacità di riflessione, d’analisi, di precisione e di
responsabilità relativa alle conclusioni.
4.
aumento delle possibilità conoscitive e comunicative.
Ho certezza di non dover essere io a sottolinearlo ma vi sarete accorti che questo tipo di “Analisi”
è quella che un “Bravo M°” esegue quotidianamente nella sua personale metodica
d’insegnamento.
Sono sicuro che il mio stesso M° non pensava che il suo scrupoloso allenamento fondamentale o
di base, dal quale noi atleti ne usciamo distrutti ma dotti, fosse una pura e propria “Analisi
Biomeccanica Qualitativa”.
2.2 Biomeccanica Quantitativa
2.2.1 Analisi quantitativa biomeccanica
Essa si basa sulla misura dei fattori che producono il movimento e sull’assegnazione di valori
numerici misurati rispetto alla loro variazione nel tempo.
L’analisi quantitativa biomeccanica ha lo scopo, attraverso modelli fisico-matematici complessi,
di portare al miglioramento della tecnica personale.
VIII
Cap. III
Colui che pratica karate non pratica semplicemente
uno sport ma è padrone di un’arte
3 LA FISICA PER LA BIOMECCANICA SPORTIVA
3.1 I concetti di base
3.1.1 Il sistema di riferimento
In fisica, ma anche nella vita comune, per descrivere il moto di un corpo è necessario specificare
la sua posizione nello spazio e come essa varia nel trascorrere del tempo.
Vediamo una descrizione scientifica classica :
1.
descrizione chiara ed univoca del fenomeno
2.
capacità di prevedere la sua futura evoluzione
3.
riproducibilità del fenomeno
Per descrivere un moto della fisica classica in maniera significativa, bisogna che esso sia definito
relativamente a qualcosa di noto, lo spostamento di due atleti può essere descritto in funzione
degli spigoli della palestra.
Quindi, per la fisica, è importantissimo definire un sistema di riferimento unico, rispetto a cui
saranno descritti tutti i fenomeni mediante le loro caratteristiche spaziali.
Ogni qualvolta che nella fisica classica, mediante un’equazione, si descrive un fenomeno od un
processo, si sottintende, anche se non è esplicitamente detto, che l’equazione è riferita al sistema
fondamentale detto : “sistema inerziale delle stelle fisse”.
Questo sistema fu individuato da Newton, e, in più, Galileo dimostrò che ogni sistema di
riferimento, che si muove a velocità costante rispetto a quello delle stelle fisse, è anch’esso adatto
a descrivere i fenomeni fisici in modo semplice.
Il principio della relatività galileiana ci assicura quindi che esistono infiniti sistemi di
riferimento, detti “inerziali”, per cui l’equazione del moto di un corpo, scritta relativamente alle
stelle fisse, è sempre la stessa, anche se, per sistema di riferimento, si prendono gli spigoli delle
pareti della stanza in cui il moto si compie.
Questo ci assicura di poter descrivere, in modo corretto, il moto degli atleti in ogni palestra e di
poter ricavare equazioni identiche per movimenti identici, ogni volta che si presenta l’occasione
di studio.
Il sistema di riferimento è identificato da tre rette perpendicolari tra di loro, dette “assi”, che si
incontrano in un punto detto “origine”.
Gli assi ortogonali che rappresentano le tre dimensioni, altezza, larghezza, profondità, vengono
genericamente chiamati assi x, y, z.
Un punto P nello spazio viene individuato da tre numeri detti “coordinate”, x¹, y¹, z¹, che
rappresentano la distanza dall’origine all’intersezione della perpendicolare all’asse relativo, dal
punto in esame.
Un tale sistema geometrico di coordinate fu per la prima volta proposto da fisico Cartesio, ed è,
pertanto, detto ed universalmente riconosciuto come : “Sistema di Assi Cartesiani Ortagonali”.
IX
3.1.2 Grandezze Scalari e Vettoriali
Nello studio dei fenomeni fisici, così come nella vita di ogni giorno, si incontrano essenzialmente
due tipi di quantità misurabili, le Grandezze Scalari e quelle Vettoriali.
3.1.3 Grandezze Scalari
Queste sono esattamente definite con un numero, per esempio, la massa di un corpo può essere
misurata in modo compiuto attraverso il peso espresso in kg, la temperatura in gradi, il volume di
un liquido in litri, la superficie di un tatami in m², e, molto importane, il tempo, espresso in
secondi.
3.1.4 Grandezze Vettoriali
Queste richiedono, per la loro caratterizzazione, non solo che sia definita la loro grandezza, ma
anche la direzione ad essa associata, per esempio, se una motocicletta HD viaggia alla velocità di
40 kmh, se non si indica la direzione, l’HD potrebbe seguire un senso di marcia, come l’opposto,
e, quindi, in un caso potrebbe avvicininarsi, nell’altro, allontanarsi da un punto certo.
3.2 La meccanica classica
In fisica, la meccanica viene ordinariamente suddivisa, per comodità di studio, in : “Cinematica,
Statica, Dinamica”.
Nella Cinematica si studiano i moti, da un punto di vista astratto e geometrico, senza occuparsi
delle cause (le forze), che li producono.
Nella Statica si studiano le forze in condizioni di equilibrio.
Nella Dinamica si analizzano le forze in azione e le loro relazioni con i moti.
3.2.1 La Cinematica
La Cinematica ci permette di studiare le proprietà dello spazio in relazione al trascorrere del
tempo; non è sufficiente conoscere la posizione di un corpo in un determinato istante, ma occorre
conoscere anche i punti via via occupati, ossia, la traiettoria (= luogo delle posizioni successive
del corpo nel tempo).
Il primo concetto fondamentale di collegamento fra spazio e tempo in Cinematica è quello della
Velocità.
La Velocità, che è una Grandezza Vettoriale, rappresenta “la rapidità con cui la posizione di un
corpo varia nel tempo”.
Il secondo concetto fondamentale è quello di Accelerazione.
L’Accelerazione che è anch’essa una Grandezza Vettoriale, è collegata alla Velocità e
rappresenta “la rapidità con cui la velocità di un corpo varia nel tempo”.
3.2.2 La Statica
Se le forze agenti di un corpo non producono alcuna Accelerazione, allora esse devono
neutralizzarsi reciprocamente e, pertanto, si dice che esse formino un sistema di forze in
equilibrio.
Se il corpo poggia su un piano, le forze esercitate dal corpo stesso sul supporto si chiamano
Reazioni e quelle uguali ed opposte esercitate dal supporto sul corpo si chiamano Forze di
Supporto o Reazioni Vincolari.
Se su di un corpo agiscono più forze, l’azione finale sarà data dalle regole dei vettori e la forza
finale si chiamerà Risultante (fig. 9).
X
Fig. 9 risultante di due forze
Se le forze sono tutte parallele e concordi, la risultante sarà ancora parallela ad esse, ed il suo
punto di applicazione si chiamerà centro di gravità o Baricentro del corpo.
Se le forze sono solo due, di eguale grandezza ma agenti in direzione parallela ed opposta,
questo particolare sistema si dirà Coppia di Forze, ed darà sempre luogo ad una rotazione del
corpo che si esprime anch’essa con un vettore detto “Momento della Coppia” (fig. 10).
La coppia di forze ha una vasta applicazione negli sport di combattimento.
Fig. 10 risultante di una coppia forze
XI
3.2.3 La Leva
Appartiene al gruppo delle macchine dette semplici, consistente in una barra che può ruotare
attorno a un punto fisso (fulcro) e soggetto all'azione di due forze contrastanti (potenza e
resistenza). La posizione del “fulcro” rispetto a “potenza - resistenza” genera tre diverse “leve” :
leva di primo (interfissa), di secondo (interesistente), di terzo genere (interponente), a seconda
che il fulcro sia, rispettivamente, interno fra potenza e resistenza, esterno dalla parte della
resistenza, esterno dalla parte della potenza (fig. 26).
3.2.4 La Dinamica Traslazionale
3.2.4.1 I Tre Principi della Dinamica
Come già accennato, la dinamica è quella branca della meccanica che si interessa del moto dei
corpi e delle cause che li generano, cioè le forze.
Con il termine di forza, in meccanica, si intende ciò che nel linguaggio corrente è noto come una
spinta o una trazione. Non dimentichiamo che le forze sono Grandezze Vettoriali, in altre parole
esse sono caratterizzate da :
1.
Intensità
2.
Direzione
3.
Verso
4.
Punto di applicazione
Come enunciato dal Primo Principio della Dinamica di Newton :
•
ogni corpo persiste nel suo stato di quiete o di moto rettilineo uniforme finchè non
interviene una forza esterna a mutarne lo stato.
Il Secondo Principio è un cardine storico per lo sviluppo degli studi sul movimento dei corpi :
•
una forza esterna, applicata ad un corpo, produce su di esso un’accellerazione
proporzionale all’inerzia o massa del corpo stesso (fig. 27 - 28).
XII
Il Terzo Principio della Dinamica o anche comunemente detto Principio di Azione e Reazione :
•
ad ogni azione corrisponde una reazione uguale e contraria.
XIII
Cap. IV
Colui che pratica karate non pratica semplicemente
uno sport ma è padrone di un’arte
4 LA BIOMECCANICA ED IL MOVIMENTO DEL CORPO UMANO
4.1 La struttura del corpo umano
Lo studio della meccanica classica, applicata al corpo umano ed ai suoi possibili moti, è un
argomento di tale complessità tecnico-scientifica e di tale infinita varietà di applicazione che solo
una parte ben ristretta è stata definitivamente affrontata e risolta.
Nella meccanica si studiano le leggi dell’azione delle forze indipendentemente dalle origini.
Nella biomeccanica, invece, si studiano le origini delle forze e di conseguenza il valore della
forza utilizzabile per l’organismo umano.
Tutte le forze, applicate all’atleta, costituiscono il sistema di forze dette esterne ed interne.
Il sistema delle forze esterne può apparire anche come resistenza, per superare la quale si
impiegano energie motorie e le tensioni muscolari.
Nella biomeccanica, la forza-agente dell’uomo è la forza dell’influenza esercitata sull’ambiente
fisico esterno, trasmessa attraverso i punti di lavoro del corpo (p. e. le prese).
I punti di contatto con i corpi esterni comunicano ad essi movimento ed energia.
La descrizione anatomico-fisiologica di queste azioni, in termini di ossa ed inserzioni muscolari,
che risulterebbe estremamente complessa e particolareggiata, è opportuno che venga sostituita da
un’astrazione semplificata.
Tale astrazione, detta “Atleta Biomeccanico”, potrà in realtà, come il corpo umano, muoversi
solo in termini di rotazioni reciproche tra le parti (arti….).
Nell’ottica semplificativa prima enunciata, si definirà dunque “l’Atleta Biomeccanico”:
•
un solido a geometria variabile ed a simmetria cilindrica, che può assumere
differenti assetti, normalmente posto in condizioni di equilibrio instabile nel campo
gravitazionale su di una superficie piana con attrito, che, attraverso gli snodi
articolari, è capace di compiere solo definite rotazioni.
4.2 Baricentro e Piani di Simmetria
Come è stato accennato precedentemente, il moto di un corpo viene completamente descritto con
ausilio di due sistemi di riferimento, uno inerziale ed immobile (gli spigoli di una palestra), ed
uno mobile strettamente legato al corpo dell’atleta e partecipe di tutti i suoi movimenti, con
l’origine posta nel suo baricentro.
Il baricentro generale di un corpo umano, posto immobile in stazione eretta, è un punto
geometrico situato approssimativamente all’interno della prima vertebra sacrale.
È importante notare che la descrizione fisica del gesto sportivo presenta un ulteriore grado di
difficoltà, infatti, poiché il corpo in movimento è formato da segmenti mobili tra loro, il
baricentro del corpo risulta anch’esso mobile e può, nel corso dell’esecuzione di alcuni gesti
sportivi, venirsi a trovare addirittura fuori dal corpo dell’atleta.
XIV
A tale riguardo pare stimolante la figurazione espressa dal prof. Dal Monte, per cui le posizioni
che il baricentro generale dell’atleta può occupare, sono comprese in una superficie pseudoellissoidale che si può espandere concentricamente a se stessa : “Uovo di Dal Monte” (fig. 38).
Il sistema cartesiano, detto “Sistema Proprio” dell’atleta, permette di individuare tre piani di
simmetria del corpo umano, detti “Piani di Orientazione” : il piano Frontale, che divide il corpo
in parte anteriore e posteriore, il piano Sagittale o Antero-Posteriore, che divide il corpo in due
metà speculari, il piano Orizzontale o Trasverso,che divide il corpo in una parte superiore ed in
una inferiore (fig. 39).
4.3 Elementi di Meccanica Articolare
I dispositivi che collegano le ossa, consentendone la mobilità, vengono dette “Articolazioni”.
Esse si distinguono in tre categorie fondamentali denominate : “Sinartrosi, Anfiartrosi e
Diartrosi” (fig. 42).
1.
nelle Sinartrosi (giunzioni mobili), le ossa sono collegate mediante l’interposizione di
un altro tessuto, che stabilisce una continuità diretta tra i segmenti scheletrici.
2.
nelle Anfiartrosi (giunzion i semi-mobili), le superfici ossee sono collegate mediante
cartilagini e comportano un legamento interosseo interposto.
XV
3.
nelle Diartrosi (giunzioni mobili), le ossa sono collegate mediante superfici lisce
rivestite di cartilagine e legate da una capsula o manicotto connettivale che avvolge la
giunzione.
La forma di un’articolazione determina la natura dei movimenti che essa può effettuare.
È sufficiente, però, per la nostra trattazione, distinguere le articolazioni attraverso il
movimento per esse possibile, detto “Grado di Libertà” (fig. 43).
1.
Articolazioni ad un grado di libertà : sono tutte quelle diartrosi che possono
muoversi in un solo piano (p. e. i movimenti di flessione-estensione
dell’articolazione omero-ulnare).
2.
Articolazioni a due gradi di libertà : sono tutte quelle diartrosi che possono
muoversi in due piani ortogonali (p. e. le articolazione del ginocchio che può
effettuare il movimento di flessione-estensione nel piano sagittale e quello di
rotazione nel piano frontale o, l’articolazione omero-radiale, che può effettuare sia
il movimento di flessione-estensione che quello di rotazione, propriamente detto di
pronazione-supinazione, nel piano perpendicolare al precedente).
3.
Articolazioni a tre gradi di libertà : sono tutte quelle diartrosi che possono effettuare
il massimo dei movimenti (p. e. l’articolazione della spalla, anca, caviglia…)
Ritengo che a questo punto si abbia sufficienti basi per comprendere quanto sia indispensabile
l’ausilio della Biomeccanica nello sport.
XVI
Cap. V
Colui che pratica karate non pratica semplicemente
uno sport ma è padrone di un’arte
5 LA BIOMECCANICA NEL KARATE
5.1 Analisi Biomeccanica generale e karate
Si analizzeranno i mezzi biomeccanici per trasferire l’energia all’avversario e la reciproca
interazione, che si basa sull’applicazione delle tecniche agonistiche efficaci che sono
l’interpretazione evoluta e personalizzata delle tecniche sportive razionali.
Prima di sviluppare lo studio delle tecniche in modo approfondito, saranno definiti ed analizzati
alcuni parametri di biomeccanica fondamentali che permettono il raggiungimento di prestazioni
della massima efficacia.
5.2 Parametri Biomeccanici Fondamentali
1.
Velocità di movimento
2.
Rapidità d’attacco e capacità di reazione
3.
Posizione relativa dei corpi
5.2.1 Velocità di Movimento
Nell’atleta di karate più che la semplice qualità fisico-fisiologica della velocità, appare
fondamentale curare la capacità di sviluppare continui ed elevati cambi di velocità ( in termini
biomeccanici elevate accelerazioni) che di fatto permettono di accorciare o allungare
opportunamente le distanze relative ai fini dell’attacco o della difesa.
5.2.2 Rapidità d’attacco e capacità di reazione
La rapidità assoluta dell’attacco che, per essere tatticamente efficace, deve essere la più elevata
possibile è una qualità fisico-tecnica propria dell’atleta.
Essa è una qualità allenabile e quindi incrementabile e grande attenzione deve essere posta al suo
miglioramento, specialmente nella prima fase atletica del soggetto.
Bisogna però ricordare che il suo incremento non deve andare a discapito della precisione di un
gesto tecnico, pertanto appare consigliabile incrementare prima la rapidità e poi, con il crescere
della capacità tecnica, affinare la precisione della tecnica.
5.2.3 Posizione relativa dei corpi
La posizione relativa dei corpi acquista un’importanza fondamentale ai fini della strategia
dell’attacco e dell’esecuzione di un determinato atto motorio, cioè la tecnica “speciale” che
l’atleta ama effettuare.
5.2.4 Definizione ottimale della Posizione relativa dei corpi in un kumite
Esso è la distanza relativa, individueremo per comodità tre diverse distanze che impongono un
trattamento biomeccanico separato :
1.
Distanza lunga : è la distanza da cui l’atleta potrà con successo effettuare un attacco di
calcio, oggi essa è di fatto considerata la distanza ottimale di combattimento che si
utilizza negli incontri di karate.
XVII
2.
Distanza intermedia : è la distanza da cui staticamente è possibile portare con successo
un attacco di pugno o tecnica corta, si acquisisce nel corso di un kumite rubando spazio
all’avversario attraverso l’utilizzo di repentini spostamenti e finte d’attacco.
3.
Distanza di contatto : oltre agli attacchi di pugno o tecniche corte, v’è anche la
possibilità di effettuare la proiezione dell’avversario, le tecniche maggiormente usate
sono le “ashi” (spazzate) definite biomeccanicamente come tecniche della coppia di
forze appartenenti al gruppo gamba/braccio.
5.3 Trasferimento dell’Energia per il III Principio della Dinamica
5.3.1 Equilibrio
Ricordando che la locomozione umana scientificamente detta “Bipodalica” è un susseguirsi di
continuo di perdita e riacquisto dell’equilibrio, e permette lo spostamento del corpo per il III
principio della dinamica (azione-reazione), questo fa comprendere certamente l’importanza
dell’equilibrio generale, ma soffermandosi sull’analisi di movimenti tecnici come i calci ruotati
(mawashi-geri) in cui il corpo dell’atleta muovendosi in rotazione nel piano mediano orizzontale
intorno ad un asse verticale passante per il piede di stazione è teso a colpire l’avversario, si
comprenderà facilmente che l’importanza debba ricoprire per l’atleta la capacità condizionale
dell’equilibrio, connessa con la precisione tecnica.
Inoltre queste doti debbono essere congiunte ad un a non comune capacità di controllo neuromuscolare, in quanto, le tecniche, debbono essere velocissime in modo da superare la capacità di
reazione difensiva dell’avversario, ed al contempo, specialmente nella zona del viso, in cui è
vietato ogni contatto, debbono essere arrestati a pochi millimetri dal bersaglio.
Questa importanza preminente dell’equilibrio in quest’arte, portò i primi maestri di karate
giapponesi a sviluppare un’acuta analisi e classificazione delle posizioni di base.
5.4 Short distance
La catena cinetica superiore ha come fondamentale funzione quella dell’azione a media e corta
distanza con il mezzo che comunemente si definisce “Tecnica Corta” (tsuki, uraken, empi…).
Nel karate, in particolar modo per le tecniche di tsuki, si eseguono essenzialmente movimenti
senza l’intervento della spalla per aumentare la velocità relativa dell’arto, mentre per aumentare
la forza di penetrazione, il braccio compie un movimento di avvitamento su se stesso mentre si
distende verso l’avversario.
XVIII
Cap. VI
Colui che pratica karate non pratica semplicemente
uno sport ma è padrone di un’arte
6 L’ANALISI BIOMECCANICA NELL’EVOLUZIONE DELLA TECNICA
6.1 Analisi Biomeccanica della Tecnica di Kitsami-tsuki
Ricordiamo che l’analisi differenziale di una “Tecnica Sportiva Razionale di Base” prevede la
scomposizione del gesto tecnico in più fasi concettuali, mi sembrano molto appropriate le
seguenti : “Caricamento, Traiettoria di Spostamento, Impatto”.
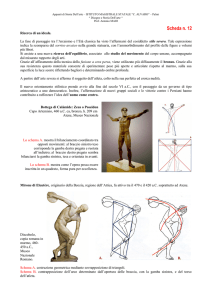
Il kitsami-tsuki (fig. 17-18), viene effettuato con il braccio dal medesimo lato della gamba
avanzata.
Nella posizione di base considerata classica (posizione libera da combattimento, ruotati di 45°), il
piede arretrato, permette il migliore sfruttamento meccanico del III principio per l’azione
dinamica che si deve eseguire.
Nella descrizione biomeccanica, applicando l’analisi differenziale, ho individuato le seguenti tre
fasi generali : “Retropulsione o Caricamento, Traiettoria di Spostamento, Impatto”.
6.1.1 Retropulsione o Caricamento
Questa fase nella particolare azione d’attacco analizzata è del tutto assente (da ciò deriva la
denominazione particolare alla tecnica di “Improvviso”), in quanto la catena biocinetica superiore
avanzata si distende in avanti lanciando un colpo istantaneo senza il preavviso della
retropulsione.
6.1.2 Traiettoria di Spostamento
L’azione di spostamento, ad esempio, della gamba sinistra avanzata al momento dello scatto in
avanti viene accompagnata da una fondamentale rotazione dell’anca, mentre al contempo il
ginocchio sinistro sollevato di scatto all’altezza dell’addome, permette di effettuare un vero e
proprio “affondo di scherma” che fa guadagnare all’atleta una decina di centimetri di distanza
utile.
Dinamica di attacco “Sen o Sen No Sen” (iniziativa di provocazione o anticipo), la tecnica si
potrà effettuare anche senza “l’Affondo”, ciò dipende dalla distanza relativa degli atleti e dalla
strategia scelta nel combattimento, dinamica di difesa “Go No Sen” (iniziativa d’attesa).
Un particolare non di meno importanza è che nemmeno la mano destra effettua un movimento di
retropulsione (hikite) ma più utilmente si pone in difesa preventiva all’altezza del gomito, per
esempio in posizione di “Te Nagashi Uke” (parata deviante con la mano).
La distribuzione del peso tra i piedi passa, nell’azione di “affondo”, da un equilibrio +/- al 50%
iniziale, ad uno spostamento al 100% con uno 0% intermedio, ad un riequilibrio +/- al 50%
finale.
Quest’azione, oltre a rientrare tra le mie tecniche di kumite (combattimento) preferite, è anche
uno dei colpi più usati dagli agonisti, essa necessita di una raffinatezza tecnica notevole, in
quanto spesso la sua effettuazione nella tensione del kumite porta l’atleta che l’esegue a
scomporre il suo assetto aprendo la guardia offrendo così un maggior bersaglio utile alle tecniche
d’incontro dell’avversario.
La tecnica si esaurisce con una controrotazione delle anche che agevolerà il ritorno veloce del
braccio semi-teso in posizione iniziale.
XIX
6.1.3 Impatto
Ricordando che l’impatto è un urto anelastico ne deriva che, maggiore sarà la velocità del pugno,
maggiore sarà l’energia cinetica trasferita all’avversario, un altro fattore determinante è il grado
di rigidità del corpo che risulterà centuplicato in competizione per ovvie ragioni di stress
psicologico intimamente correlato alle più svariate “Paure” ma questo è un argomento tanto
complesso da meritare un intero studio su di esso.
Consideriamo inoltre che il Seiken (parte anteriore del pugno) per essere efficace deve portare il
colpo di primo impatto con la colonna portante media composta dal terzo metacarpo dal
semilunare e dal grande osso (dalla direzione del medio); infatti se si colpisce prima con l’indice
(colonna portante esterna) o con l’anulare del mignolo (colonna portante interna) si può andare
incontro a possibili fratture dell’arto.
Le energie cinetiche medie trasferite, che a causa del movimento di avvitamento del braccio
d’azione, tradotte in pressioni, sono dell’ordine 400/500 kg/cm², misura che facilmente ne fa
comprendere la pericolosità reciproca di tali colpi, sia per l’avversario sia per la struttura ossea
della mano dell’atleta che li esegue.
FIg. 17 tecnica razionale di base di kitsami-tsuki fase iniziale
XX
figg. 18 tecnica razionale di base di kitsami-tsuki fase finale
6.2 Analisi Biomeccanica della Tecnica di Mawashi-geri
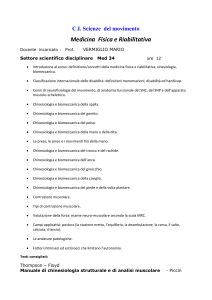
L’analisi biomeccanica di questa tecnica di gamba propriamente detta “Mawashi-geri” o calcio
circolare (fig. 19) può essere sviluppata sui tre momenti fondamentali comuni a tutte le tecniche
di “geri” (Retropulsione o Caricamento, Traiettoria di Spostamento, Impatto).
Mawashi-geri è una tecnica di gamba, in cui la frustata del ginocchio e la rotazione interna
dell’anca devono essere applicate simultaneamente per effettuare un corretto ed efficace attacco
frontale.
Un vantaggio tecnico notevole di questa azione e che essa può essere effettuata indifferentemente
con la gamba anteriore o posteriore.
6.2.1 Retropulsione o Caricamento
La fase iniziale di questa tecnica prevede che la distribuzione del peso vari drasticamente da una
distribuzione su hamni di +/- del 50% al 100% sulla gamba d’appoggio.
Sollevando la gamba per equilibrare il peso, il corpo tenderà ad inclinarsi in direzione opposta
alla gamba per conservare la possibilità ottimale di rotazione.
Passando daall’appoggio bipodale (due piedi) a quello unipodale (un piede), bisogna ricordare
che l’unico punto d’appoggio del tronco sulla gamba è fornito dall’anca, la cui stabilità ruotando
sull’asse del femore condizionerà grandemente il calcio.
Ricordiamo, come detto in precedenza che, il momento angolare varia con il quadrato della
distanza delle masse distali dall’asse di rotazione, l’inclinazione o l’allargamento devono essere
minori possibili per non rallentare il corpo, per tanto questa è la ragione biomeccanica per cui
XXI
sarà necessario mantenere il calcagno vicino alla natica e le braccia più vicino possibile al corpo,
per accrescere così la velocità di rotazione e rendere più efficace il calcio.
6.2.2 Traiettoria di Spostamento
La migliore traiettoria di spostamento di questa tecnica in condizioni statiche ed in allenamento
solitario, è quella relativa alla traslazione del membro inferiore raccolto nel piano traverso, per
poi definire il bersaglio (jodan, chudan, gedan) nella seconda metà del colpo con la distensione
del ginocchio.
Ricordando che la vera “locomotiva” del calcio è il femore con i muscoli interessati la traiettoria
può avere un percorso angolare tra i 120° ed i 180° a secondo del grado di flessibilità dell’anca
dell’atleta ed è essenzialmente diretta dal complesso anca, femore d’azione che producono
momento rotante nella direzione del calcio. Poiché il karateka è fermo, per la conservazione del
momento angolare, la gamba di sostegno all’altezza della caviglia deve reggere un momento
angolare opposto in intensità e direzione.
In oltre ricordando che l’atleta calciante può essere assimilato ad un rotore verticale cilindrico, la
biomeccanica ci assicura che considerando l’attrito con l’aria, la velocità angolare dell’atleta
aumenterà nel tempo tendendo ad un valore limite dato dal momento della forza diviso il
coefficiente d’attrito dell’aria, in termini qualitativi : più lunga sarà la traiettoria di rotazione,
maggiore sarà la velocità angolare finale, per cui il colpo risulterà più potente.
Ricordiamo che il momento di rotazione interna dell’anca è governato dal muscolo chiamato
piccolo gluteo, durante la fase iniziale della rotazione sarà quello opposto ( cioè quello della
gamba di sostegno ) che governerà il movimento. Quando invece il ginocchio sarà disteso,
durante la parte terminale del colpo, sarà quello omologo dal lato del ginocchio che dirigerà la
rotazione interna dell’anca e la traiettoria finale dell’azione.
6.2.3 Impatto
L’impatto dovrà essere portato nel mawashi-geri con la testa del 1° e 2° metatarso del piede, con
le dita in estensione, per trasferire il massimo dell’energia cinetica il piede dovrà avere una
grande velocità, che come abbiamo visto dipenderà dalla maggiore lunghezza della traiettoria.
Bisognerà però fare attenzione, sia al ginocchio della gamba d’azione, ricordando che la potenza
dell’attacco deriva dall’azione combinata di anca e femore, che al ginocchio della gamba di
sostegno.
Infatti al momento dell’impatto esso a causa dello slancio tenderà a distendersi e sarà essenziale
a mantenerlo leggermente flesso per evitare che il brusco arresto per il principio di azione e
reazione possa procurare danni ai legamenti.
Infatti la condizione di leggera flessione è per questa articolazione la sola che permetta la
rotazione assiale del ginocchio che di fatto insieme alla caviglia si troverà a dover assorbire
completamente, per il principio di conservazione dell’energia, il contraccolpo derivato
dall’impatto anelastico.
XXII
Fig. 19 tecnica razionale di base di mawashi-geri
6.3 Conclusioni
“Ti sei svegliato prima dell'alba, ma il tuo nemico non l'hai trovato.
Quando il sole era basso hai attraversato tutta la pianura, ma il tuo nemico non l'hai trovato.
Mentre il sole era alto nel cielo hai cercato tra le piante di tutta la foresta, ma il tuo nemico non
l'hai trovato.
Il sole era rosso nel cielo mentre tu cercavi sulla cima di tutte le colline, ma il tuo nemico non
l'hai trovato.
Ora sei stanco e ti riposi sulla riva di un ruscello, guardi nell'acqua ed ecco il tuo nemico: l'hai
trovato”.
(Racconti Zen).
Nella guerra quotidiana contro noi stessi, spesso perdiamo; nel trovare le forze per affrontare un
nuovo esame, nel perseguire una strada impervia come lo studio interminabile del “Do”, nella
sola comprensione dello stesso, nella vita di tutti i giorni, abbiamo una sola arma per vincere
contro noi stessi : “Pazienza, Umiltà, Volontà e Determinazione”.
Questa filosofia vuole essere un tentativo di realizzare qualcosa di possibile in questa cosa
impossibile che è il vincere contro se stessi.
XXIII