1
Dinamica del moto rotatorio di un punto materiale.
Si comincia qui uno studio del moto rotatorio di un punto materiale, delle forze che producono tale moto e
delle leggi conservazione che sono coinvolte con l’obiettivo di estendere i risultati ottenuti alla dinamica dei
sistemi e del corpo rigido
1.1
Momento angolare.
Nello studio del moto rotatorio, risulta utile il concetto di momento della quantità di moto o momento
angolare, definito come segue. Il momento angolare rispetto ad un polo O di un punto materiale di massa
m che, trovandosi nel punto P con velocità v, è il vettore
LO = OP ∧ mv .
(1)
La direzione di LO è perpendicolare al piano che contiene OP e v, il verso è dato dalla regola della mano
destra e il modulo è
LO = mrv⊥ = mr⊥ v = mrv sen α ,
(2)
dove con r si è indicato il modulo del vettore OP, con il simbolo v⊥ si è indicata la componente di v
perpendicolare alla direzione di OP, con il simbolo r⊥ si è indicata la componente di OP perpendicolare
alla direzione di v e α è l’angolo formato dai due vettori OP e v. Il punto O, rispetto al quale è definito il
momento angolare, è detto polo.
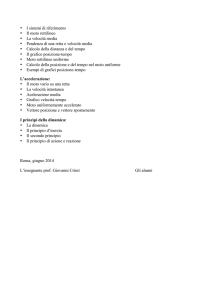
Si consideri ora il caso particolare, ma molto importante, del moto circolare uniforme; si prenda come polo il
centro O della traiettoria, allora il vettore OP coincide con il vettore r. Il momento angolare è perpendicolare
ω
v
P
O
r
Figura 1: Il vettore velocità angolare.
al piano in cui si svolge il moto e il suo verso punta nella direzione dalla quale il moto è visto svolgersi in
senso antiorario, inoltre poiché v e OP sono perpendicolari il modulo del momento angolare può essere
scritto nella forma
LO = mrv = mr2 ω ,
(3)
ove, nello scrivere l’ultima equazione, si è tenuta presente la relazione fra i moduli della velocità lineare e
della velocità angolare: v = ωr. È conveniente definire il vettore ω avente come modulo il valore di ω, come
direzione quella perpendicolare al piano del moto e come verso quello tale che un osservatore disposto come
ω veda il moto svolgersi in senso antiorario. Vale allora, si confronti la figura 1,
v = ω ∧ r.
(4)
Con tale definizione il vettore LO può essere scritto nella forma
LO = mr2 ω .
1.2
(5)
Conservazione del momento angolare.
Si calcola ora qual’è la variazione di LO quando il punto materiale è sottoposto ad una forza F; è chiaro
infatti che sotto l’azione di una forza il vettore v varia e quindi anche il vettore LO . Si consideri quindi
1
un intervallo di tempo ∆t, in cui la velocità del punto materiale vari dal valore v(t) al valore v(t + ∆t), la
variazione del momento angolare è quindi
£
¤
∆LO (t) = ∆ OP(t) ∧ mv(t) =
= OP(t + ∆t) ∧ mv(t + ∆t) − OP(t) ∧ mv(t) =
= OP(t + ∆t) ∧ mv(t + ∆t) − OP(t + ∆t) ∧ mv(t) +
(6)
+ OP(t + ∆t) ∧ mv(t) − OP(t) ∧ mv(t) =
= OP ∧ m [v(t + ∆t) − v(t)] + [OP(t + ∆t) − OP(t)] ∧ mv(t) =
= OP(t + ∆t) ∧ m∆v(t) + ∆OP(t) ∧ mv(t) ,
dove si è usata la nota proprietà del prodotto vettoriale a ∧ b + a ∧ c = a ∧ (b + c) e si è definito ∆OP(t) =
OP(t+∆t)−OP(t) e ∆v(t) = v(t+∆t)−v(t). Dividendo membro a membro l’equazione (6) per la quantità
∆t si ottiene
∆LO (t)
∆v(t) ∆OP(t)
= OP(t + ∆t) ∧ m
+
∧ mv(t) ;
(7)
∆t
∆t
∆t
nel limite in cui l’intervallo di tempo ∆t tende a zero, si trova
OP(t + ∆t) → OP(t)
∆OP(t)
→ v(t)
∆t
∆v(t)
→ a(t) .
∆t
(8)
In tale limite quindi vale
∆LO (t)
= OP(t) ∧ ma(t) + v(t) ∧ mv(t) ;
(9)
∆t
si osservi ora che ma(t) = F(t) e che il secondo addendo è nullo perché si tratta del prodotto fra due vettori
paralleli, quindi
∆LO (t)
= OP(t) ∧ F(t) ,
(10)
∆t
ma il secondo membro di questa equazione è il momento MO della forza F rispetto al polo O, quindi in ogni
istante vale la seguente equazione fondamentale
MO =
∆LO
.
∆t
(11)
Da questa equazione segue immediatamente il principio di conservazione del momento angolare.
Se il momento della risultante delle forze agenti su di un punto materiale è nullo il
momento angolare è costante durante il moto.
Osservazioni
1. Non è affatto necessario che la risultante delle forze agente sia nulla affinché sia nullo il suo momento.
Piú sotto si vedrà l’importante esempio delle forze centrali, per le quali il momento, calcolato rispetto
al centro, è sempre nullo.
2. L’equazione (11) è vera solamente se i due momenti, angolare e della forza risultante, sono calcolati
rispetto allo stesso polo O.
2
1.3
Forze centrali.
Le forze centrali, che svolgono un ruolo fondamentale nello studio della dinamica del punto materiale, sono
definite dalle seguenti condizioni.
i. Qualunque sia il punto P dello spazio in cui trova il punto materiale, la forza F è diretta secondo la
retta passante per P e per un punto fisso O detto centro di forza.
ii. Il modulo della forza F dipende solamente dalla distanza di P dal centro, cioè dal modulo r del vettore
OP.
Una forza centrale può essere attrattiva o repulsiva a seconda che sia diretta verso il centro o dal centro verso
l’esterno, cioè a seconda che abbia lo stesso verso di PO o di OP rispettivamente.
Le proprietà delle forze centrali sono le seguenti.
A. Le forze centrali sono conservative ed è sempre possibile definire una funzione energia potenziale U (r)
che dipenda solo dalla distanza dal centro.
La dimostrazione di questo fatto nel caso piú generale è un esercizio difficile; a titolo di esempio si
pensi alla forza elastica di una molla o alla forza di gravitazione universale.
B. Il momento di una forza centrale, calcolato rispetto al centro, è nullo.
Questa proprietà è una semplice conseguenza della definizione di momento di una forza
MO = OP ∧ F ,
e del fatto che nel caso che la forza sia centrale F e OP hanno la stessa direzione e quindi il prodotto
vettoriale è nullo.
C. Il momento angolare di un punto materiale sottoposto ad una forza centrale è costante.
Questa proprietà segue direttamente dalla precedente, come osservato sopra.
D. Un punto materiale sotto l’azione di una forza centrale si muove di moto piano.
Infatti dall’equazione (1) segue che il vettore OP è perpendicolare al vettore LO ma, per la proprietà
C, il vettore LO è costante, in particolare è costante la sua direzione, quindi OP è perpendicolare ad
una direzione costante, quindi P si muove necessariamente sul piano passante per O e perpendicolare
alla direzione di LO .
E. La velocità areolare di un punto materiale in moto sotto l’azione di una forza centrale è costante.
Si tratta pertanto di calcolare l’area spazzata dal raggio vettore nell’intervallo di tempo ∆t in cui
percorre un angolo ∆θ.
Q
H
P
∆θ
O
Figura 2: Approssimazione per il calcolo della velocità areolare.
Se l’intervallo di tempo, come qui si suppone, è abbastanza piccolo, tale area può essere approssimata
a quella del triangolo OP Q (vedi figura 2) che è
∆A =
1
OQ · P H ,
2
3
(12)
osservando che vale P H = OP sen ∆θ, si può riscrivere
¯ 1¯
¯ 1¯
¯
1
1 ¯¯
¯
¯
¯
¯
¯
∆A = OQ · OP sen ∆θ = ¯OP ∧ OQ¯ = ¯OP ∧ (OP + PQ)¯ = ¯OP ∧ PQ¯
2
2
2
2
ma PQ è il vettore spostamento, vale quindi, PQ = v∆t; cosı́:
¯
1 ¯¯
¯
∆A = ¯OP ∧ v∆t¯
2
(13)
(14)
e quindi, dividendo per ∆t,
¯
¯ |L |
1 ¯¯
∆A
1 ¯¯
¯
¯
O
= ¯OP ∧ v¯ =
.
¯OP ∧ mv¯ =
∆t
2
2m
2m
(15)
Pertanto dalla costanza del momento angolare discende la costanza della velocità areolare.
Osservazioni
1. Un esempio molto importante di forza centrale è quello del moto dei pianeti attorno al Sole; nello studio
del moto di un pianeta, infatti, a causa del fatto che la massa del Sole è enorme rispetto a quella di un
pianeta (dell’ordine di mille volte piú grande, nel caso dei pianeti maggiori quali Giove e Saturno, e
dell’ordine di un milione di volte nel caso dei pianeti minori quali Venere, Terra e Marte) l’accelerazione
del Sole è trascurabile1 , si può pertanto considerare il Sole fermo nel centro O e i pianeti in moto sotto
l’azione di una forza diretta verso il centro e che dipende solo dalla distanza (piú precisamente, com’è
noto, dall’inverso del quadrato della distanza), si tratta quindi di una forza centrale. Quindi:
a) la forza agente sui pianeti è conservativa;
b) il momento di tale forza rispetto al centro è nullo;
c) il momento angolare è costante;
d) il moto si svolge lungo una traiettoria piana (che è nota essere un’ellisse);
e) la velocità areolare è costante.
Quest’ultimo fatto è noto con il nome di seconda legge di Kepler. Le altre due leggi di Kepler,
diversamente dalla seconda (che come abbiamo visto è vera per ogni forza centrale) sono vere solamente
se la forza centrale è attrattiva ed inversamente proporzionale al quadrato della distanza dal centro.
2
Dinamica dei sistemi.
In questo capitolo si affronta il problema della determinazione del moto di un sistema che possa essere rappresentato teoricamente mediante un insieme di N punti materiali definiamo tale insieme sistema materiale;
si indichi con Pi l’i-esimo punto del sistema (i = 1, . . . , N ), con mi la sua massa, con vi la sua velocità, con
ai la sua accelerazione e con Fi la risultante delle forze agenti su di esso in un dato istante.
Le forze agenti sul punto materiale i-esimo possono essere di due tipi: quelle esercitate da altri punti materiali
del sistema, dette forze interne, e quelle dovute a corpi esterni al sistema, dette forze esterne. Si osservi
che la risultante di tutte le forze interne agenti sul sistema materiale è nulla: se il punto i-esimo esercita
una forza Fij sul punto j-esimo è chiaro che, per il terzo principio di Newton, il punto j-esimo esercita sul
punto i-esimo una forza uguale e contraria −Fij , pertanto la risultante è zero. Le forze interne Fij e −Fij
inoltre hanno anche momento totale nullo rispetto ad un qualunque polo O, infatti le due forze hanno la
stessa direzione ma verso opposto, quindi costituiscono una coppia di forze a braccio nullo, pertanto il loro
momento totale è zero. Quanto detto è vero per qualunque coppia di punti materiali del sistema; quindi
La risultante ed il momento risultante rispetto al generico polo O di tutte le forze
interne di un sistema di punti materiali sono nulli.
1 Tale
approssimazione, del resto, non è assolutamente necessaria; si può fare esattamente lo stesso ragionamento riferendo il
moto del pianeta al centro di massa (si veda oltre).
4
2.1
Equazioni cardinali.
L’equazione del moto dell’i-esimo punto materiale Pi è
Fi = FIi + FE
i = mi ai ,
(16)
dove FIi è la risultante delle forze interne e FE
i la risultante delle forze esterne agenti su Pi . Sommando i
contributi di tutti gli N punti materiali del sistema e usando il fatto che la risultante delle forze interne è
zero, si trova
N
N
X
X
FE =
FE
=
m i ai .
(17)
i
i=1
i=1
Si osservi ora che per ogni punto materiale vale
∆pi
m∆vi
=
.
(18)
∆t
∆t
Nell’equazione precedente si è usata la definizione di quantità di moto di un punto materiale definita dal
prodotto fra la massa m e la velocità v indicata con il simbolo pi :
Fi = mi ai =
pi = mi vi .
(19)
Si può allora scrivere
FE =
N
X
∆pi
i=1
∆t
=
N
¤
1 X£
1
pi (t + ∆t) − pi (t) =
[P(t + ∆t) − P(t)] ;
∆t i=1
∆t
(20)
ove il vettore P, detto quantità di moto totale del sistema materiale è la somma di tutte le quantità di
moto dei punti materiali componenti il sistema, cioè è il vettore
P=
N
X
pi .
(21)
∆P
.
∆t
(22)
i=1
In definitiva quindi vale
FE =
Questa equazione, che mette in relazione la risultante delle forze esterne agenti su un sistema materiale con
la variazione nel tempo della quantità di moto totale del sistema, è detta prima equazione cardinale.
Applicando l’equazione (11) a ciascuno dei punti materiali che costituiscono il sistema materiale in questione
si trova, rispetto al generico polo O
∆LOi
.
(23)
∆t
Ricordando che il momento totale delle forze interne è nullo e sommando su tutti punti materiali si ottiene
OPi ∧ Fi = OPi ∧ (FIi + FE
i )=
ME
O =
N
X
i=1
OPi ∧ FE
i =
N
X
∆LOi
i=1
N
=
∆t
1 X
[LOi (t + ∆t) − LOi (t)] ;
∆t i=1
(24)
definendo ora momento angolare totale del sistema materiale la quantità
LO =
N
X
LO i ,
(25)
∆LO
.
∆t
(26)
i=1
si ottiene
ME
O =
Questa equazione, che mette in relazione il momento delle forze esterne agenti su un sistema materiale con
la variazione nel tempo del momento angolare totale del sistema, è detta seconda equazione cardinale.
5
Osservazioni
1. La prima equazione cardinale non è altro che la legge fondamentale della dinamica per i sistemi materiali
e la seconda equazione cardinale è l’estensione per i sistemi materiali dell’equazione (11).
2. Se il sistema materiale è isolato, cioè se la risultante delle forze esterne è nulla, la quantità di moto
totale del sistema materiale è costante nel tempo. Questo fatto, si noti, è vero per ogni componente;
cioè se, per esempio, è nulla la componente x della risultante delle forze esterne, vale
Fx =
∆Px
=0
∆t
=⇒
Px = cost. .
(27)
Quindi se è nulla la risultante delle forze esterne lungo una direzione, la componente della quantità di
moto secondo quella direzione è una costante del moto. Analogamente se il momento totale delle forze
esterne agenti sul sistema è nullo il momento angolare totale è una costante del moto e se è nullo il
momento totale delle forze esterne lungo una direzione, la componente del momento angolare secondo
quella direzione è una costante del moto.
3. Conseguenza della precedente osservazione è la seguente affermazione.
La quantità di moto totale ed il momento angolare totale di un sistema materiale
isolato sono costanti del moto.
2.2
Centro di massa.
Si consideri ora la quantità di moto totale del sistema materiale
N
¤
1 X £
∆OPi
=
mi OPi (t + ∆t) − OP(t) =
∆t
∆t
i=1
i=1
i=1
N
N
X
£
¤
¢
1
1 X ¡
=
mi OPi (t + ∆t) − mi OP(t) =
∆ mi OPi =
∆t i=1
∆t i=1
ÃN
!
X
1
mi OPi ;
=
∆
∆t
i=1
P=
N
P
mi vi =
dove è stata usata la proprietà
N
P
i=1
N
P
mi
¡
¢
∆ mi OPi = ∆
µN
P
i=1
(28)
¶
mi OPi
2
.
Si definisce centro di massa del sistema materiale il punto G, la cui posizione è data dal vettore
N
OG =
1 X
mi OPi
m i=1
dove
m=
N
X
(29)
mi
(30)
i=1
è la massa totale del sistema materiale. Per chiarezza, conviene esplicitare la precedente equazione vettoriale
nelle tre componenti che danno le coordinate di G rispetto al sistema di riferimento prescelto:
xG =
N
1 X
mi xi
m i=1
,
yG =
N
1 X
mi yi
m i=1
,
zG =
N
1 X
mi zi .
m i=1
(31)
Confrontando le equazioni (28) e (29), si trova
P=
2 Il
1
∆OG
∆(mOG) = m
= mvG ,
∆t
∆t
lettore studioso fornisca una dimostrazione di questa proprietà.
6
(32)
cioè la quantità di moto totale è uguale alla quantità di moto di un corpo di massa pari alla massa dell’intero
sistema avente la velocità del centro di massa.
È opportuno, prima di andare oltre, ricavare la velocità vG del centro di massa in termini delle N velocità
vi ; a tale scopo si osservi che dalle equazioni (28) e (32) si ricava direttamente
P=
N
X
mi vi
e
P = mvG
(33)
i=1
dalle quali, per confronto,
vG =
N
1 X
mi vi .
m i=1
(34)
Dalla prima equazione cardinale (22) si trova inoltre
FE =
∆P
∆vG
=m
= maG ,
∆t
∆t
(35)
Esprimente il seguente teorema del centro di massa.
Il centro di massa di un sistema materiale si muove come un punto materiale di
massa uguale alla massa dell’intero sistema e sottoposto ad una forza pari alla
risultante delle forze esterne agenti sul sistema.
Osservazioni
1. Il risultato trovato è molto importante. Si è ricondotta la dinamica dell’intero sistema (pur perdendo
ogni informazione sul moto delle sue singole parti) alla dinamica del solo centro di massa.
2. Il teorema del centro di massa non è altro che la prima equazione cardinale scritta in termini del moto
del centro di massa.
3. Dal teorema del centro di massa segue che se un sistema materiale è isolato il suo centro di massa si
muove di moto rettilineo ed uniforme.
4. Per un sistema isolato se il centro di massa è fermo in un dato istante rimane fermo durante tutta
l’intera evoluzione dinamica del sistema. Come esempio, si consideri un ordigno esplosivo fermo, al
momento dell’esplosione (dovuta evidentemente a meccanismi interni e non a forze esterne) i vari pezzi
in cui si disgrega l’ordigno si disperdono in tutte le direzioni, ma il loro centro di massa rimane fermo.
5. Il momento totale della risultante di tutte le forze peso agenti sui punti del sistema materiale è nullo
non appena si scelga come polo il centro di massa. Infatti rispetto al generico polo O si trova
ÃN
!
N
X
X
MO =
OPi ∧ mi g =
mi OPi ∧ g = OG ∧ g = OG ∧ mg ;
(36)
i=1
i=1
è chiaro quindi che se O coincide con G vale
MG = GG ∧ mg = 0 .
(37)
Da questo risultato segue che la risultante delle forze peso del sistema materiale ha braccio nullo rispetto
al centro di massa, quindi la direzione di tale risultante passa per G. Osservando che questo risultato
è indipendente dall’orientazione del sistema, ne segue che la risultante delle forze peso è applicata in
G. Per questo il centro di massa viene anche detto centro di gravità.
7
2.3
Problema dei due corpi. Massa ridotta.
Come prima importante applicazione del concetto di centro di massa, si considera in questo paragrafo il problema dei due corpi.
Con tale nome si è soliti indicare il problema dinamico di due punti materiali P1 e P2 che interagiscano solamente fra di loro e
quindi costituiscano un sistema isolato. Ciò significa che le due forze agenti sui due punti sono uguali in modulo e in direzione
e contrarie in verso, vale cioè
F1 = −F2 .
(38)
Non è necessario fare alcuna ipotesi sulla natura della forza di interazione dei due punti materiali, rimanendo quindi inteso che
tutto ciò che segue è vero qualunque sia tale forza. Il centro di massa G del sistema è tale che valga l’equazione, vedi (29),
mOG = m1 OP1 + m2 OP2 .
(39)
L’ipotesi semplificatoria che permette di risolvere agevolemente il problema dinamico è quello di studiarlo nel sistema di
riferimento del centro di massa G, cioè scegliendo il punto O coincidente con G; in tal caso l’equazione ora scritta diventa
m1 GP1 + m2 GP2 = 0 .
(40)
Indicando con r, il vettore distanza fra i due punti materiali, vale
r = P2 P1 = GP1 − GP2 ;
Da queste due equazioni è possibile
(41)
ricavare3
m2
GP1 = m + m r ,
1
2
m
1
GP2 = − m + m r .
1
Si osservi inoltre che, definendo la quantità v =
v=
(42)
2
∆r
, si ottiene
∆t
∆r
∆GP1
∆GP2
=
−
= u1 − u2 ,
∆t
∆t
∆t
(43)
ove u1 e u2 sono le velocità di P1 e P2 rispetto a G ed, evidentemente, v è la loro velocità relativa. Con queste definizioni, le
leggi del moto dei due punti materiali
a1 =
F1
∆u1
=
∆t
m
sottratte membro a membro diventano
a1 − a2 =
a2 −
∆u2
F2
=
,
∆t
m
∆(u1 − u2 )
F1
F2
=
−
,
∆t
m1
m2
(44)
(45)
cioè, ricordando che F1 = −F2 ,
µ
¶
1
∆v
1
=
+
F1 ,
∆t
m1
m2
ove a = a1 − a2 è l’accelerazione relativa dei due punti materiali. Se ora definiamo la massa m tale che
a=
1
1
1
+
+
mR
m1
m2
−→
mR =
m1 m2
,
m1 + m2
(46)
(47)
l’equazione (46) diventa
F1 = mR a ,
(48)
cioè il problema di due corpi, studiato rispetto al centro di massa, è equivalente al problema di un unico punto materiale di
massa m sotto l’azione della forza F1 . La massa mR , definita dall’equazione (47), è detta massa ridotta. Una volta risolta
l’equazione (48), e determinata la legge del moto r(t), è possibile determinare il moto dei due punti materiali P1 e P2 rispetto
a G, e pertanto GP1 (t) e GP2 (t) usando le (42). Ricavato il moto nel sistema del centro di massa è possibile ricavarlo rispetto
ad un qualunque punto O osservando che vale OP = OG + GP, quindi tramite le (42) otteniamo
m2
r
OP1 = OG +
m1 + m2
(49)
m
1
OP2 = OG −
r .
m1 + m2
3I
facili calcoli che portano alla (42) sono lasciati come esercizio al lettore studioso.
8
Osservazioni
1. Nel caso in cui i due punti materiali abbiano la stessa massa, cioè sia m1 = m2 , la massa ridotta è la metà di ciascuna
massa. Nel caso in cui i due punti materiali siano uno molto piú massivo dell’altro, il centro di massa del sistema coincide
praticamente con la massa maggiore che quindi può essere considerata ferma; in questo caso la massa ridotta coincide
praticamente con la massa minore, infatti se m1 ¿ m2 e quindi m1 /m2 ¿ 1, vale4
mR = m1
1
m1 ' m1 .
m2
(50)
1+
2. Quest’ultimo caso è particolarmente rilevante nel caso in cui si studi il sistema Sole–Pianeta, usando il modello di punti
materiali interagenti solo fra loro; in questo caso infatti è un ottima approssimazione considerare il Sole fermo nel centro
di massa del sistema ed il pianeta in moto sotto l’azione di una forza diretta verso il centro, cioè verso il Sole. Questa
osservazione si ricollega alla nota alla prima osservazione del paragrafo sulle forze centrali.
3. La teoria qui sviluppata della dinamica di due punti materiali costituenti un sistema isolato, ed in particolare lo studio
del moto scegliendo un sistema di riferimento solidale con il centro di massa, è utile nello studio degli urti.
3
Energia cinetica di un sistema materiale.
L’energia cinetica totale di un sistema materiale è la somma delle energia cinetica di ciascun punto materiale
componente il sistema
N
X
1
Ec =
mi vi2 ,
(51)
2
i=1
dove qui la velocità dei punti materiali è misurata rispetto ad un generico punto O. Introducendo un secondo
sistema di riferimento centrato nel centro di massa G del sistema per le velocità dei punti vale la relazione
vi = vG + ui ,
(52)
dove vG è la velocità di G rispetto a O e ui è la velocità dell’i-esimo punto materiale rispetto a G. Si osservi
ora che
vi2 = vi · vi = (vG + ui ) · (vG + ui ) = vG2 + u2i + 2vG · ui ;
(53)
sostituendo questo risultato nell’equazione (51) si ottiene
Ec =
N
X
1
i=1
2
2
m i vG +
N
X
1
i=1
2
mi u2i
N
X
N
X
1
1
+
mi vG · ui = mvG2 +
mi u2i + vG ·
2
2
i=1
i=1
Ã
N
X
!
mi ui
.
(54)
i=1
Si consideri ora la quantità fra parentesi nell’ultimo addendo: essa è la quantità di moto totale del sistema
materiale calcolata nel sistema di riferimento del centro di massa; ma ricordando l’equazione (32), la quantità
di moto totale del sistema è pari alla massa totale per la velocità del centro di massa; poiché la velocità del
centro di massa nel sistema del centro di massa è nulla è chiaro che la quantità fra parentesi è nulla. Ciò
può anche essere dimostrato analiticamente come segue
N
X
i=1
mi ui =
N
X
mi (vi − vG ) =
i=1
N
X
mi vi − mvG = mvG − mvG = 0 ,
(55)
i=1
dove è stata usata l’equazione (34). In conclusione resta dimostrata la seguente importante equazione
Ec =
N
X
1
1
mvG2 +
mi Vi2 ,
2
2
i=1
esprimente il seguente teorema di König.
4I
facili calcoli che portano alla (50) sono lasciati come esercizio al lettore studioso.
9
(56)
L’energia cinetica totale di un sistema materiale calcolata rispetto ad un certo sistema di riferimento è in ogni istante uguale alla somma dell’energia cinetica di un
punto materiale avente massa pari alla massa totale del sistema e velocità pari alla
velocità del centro di massa e dell’energia cinetica del sistema materiale calcolata
nel sistema del centro di massa.
Osservazioni
1. Il teorema dell’energia cinetica si estende, al caso dei sistemi materiali, in modo ovvio: la variazione
di energia cinetica totale di un sistema materiale è uguale al lavoro compiuto dalle forze interne ed
esterne sul sistema. È chiaro che il lavoro delle forze esterne è uguale alla variazione del primo addendo
dell’equazione (56), mentre il lavoro delle forze interne è uguale alla variazione del secondo addendo.
2. Analogamente per la conservazione dell’energia meccanica: se tutte le forze agenti sul sistema materiale,
interne ed esterne, sono conservative, l’energia totale del sistema, cioè la somma di energia cinetica ed
energia potenziale, è una costante.
4
Dinamica del corpo rigido.
Si definisce corpo rigido un sistema materiale in cui le distanze reciproche fra i punti materiali sono costanti;
data cioè una qualunque coppia di punti materiali Pi e Pj , la distanza |Pi Pj | rimane la stessa a dispetto del
fatto che i due punti si muovano nel tempo.
4.1
Moto traslatorio e moto rotatorio.
Si consideri ora un corpo rigido di centro di massa G e si consideri il moto del corpo rigido nel sistema del
centro di massa: è chiaro che durante tale moto tutti i punti materiali del sistema si mantengono in ogni
istante a distanza costante da G, si muovono cioè descrivendo archi di circonferenza con centro su di un asse
di rotazione passante per G; in altre parole il moto di un corpo rigido nel sistema del suo centro di massa è
in ogni istante un moto rotatorio attorno ad un asse passante per G5 . Un generico spostamento del corpo
rigido può essere pertanto scomposto in una traslazione del suo centro di massa piú una rotazione attorno
al centro di massa. Il moto di traslazione del centro di massa è regolato dalla prima equazione cardinale
FE = maG ,
(57)
dove FE è la risultante delle forze esterne, m è la massa totale del corpo rigido e aG è l’accelerazione del
centro di massa. Il moto di rotazione attorno al centro di massa è invece regolato dalla seconda equazione
cardinale
∆LG
ME
.
(58)
G =
∆t
Lo studio dell’equazione (57) non è altro che lo studio del moto del punto materiale G di massa m sottoposto
all’azione della forza FE ; un tale problema è già stato affrontato nello studio della dinamica del punto
materiale e non ci si torna sopra in questa sede. Qui si rivolge l’attenzione essenzialmente al problema del
moto rotatorio del corpo rigido nel sistema del suo centro di massa, cioè allo studio dell’equazione (58).
4.2
Dinamica rotatoria del corpo rigido.
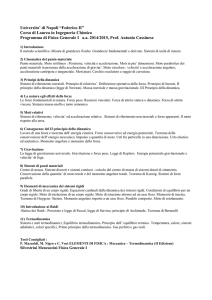
Si consideri un corpo rigido costituito da N punti materiali in rotazione attorno ad un asse passante per il
suo centro di massa G; in tal caso ogni punto materiale del corpo rigido si muove lungo una circonferenza
con il centro in un punto dell’asse di rotazione. In ogni istante ogni punto materiale del corpo rigido si muove
5 In
generale in istanti diversi l’asse di rotazione può essere diverso. Per semplicità qui e nel seguito si suppone che l’asse di
rotazione resti invariato.
10
con la stessa velocità angolare ω e, se l’i-esimo punto si trova ad una distanza ri dall’asse di rotazione, il
modulo della sua velocità è data dall’equazione
vi = ωri .
(59)
La situazione è ben illustrata dalla figura 3 in cui è rappresentato un disco rotante visto dall’alto (dalla
direzione verso cui punta il vettore velocità angolare ω): i punti Pi e Pj , che hanno diverse distanze dal
centro di rotazione, nello stesso intervallo di tempo si muovono con la stessa velocità angolare percorrendo
archi di circonferenza di lunghezza diversa e quindi a velocità diversa.
Pj
O
Pi
Figura 3: Il disco rotante.
L’energia cinetica del corpo rigido si può pertanto scrivere nella forma
!
ÃN
N
N
X
X
1
1
1 X
2
2
2 2
Ec =
mi ri ω 2 .
m i vi =
mi ω ri =
2
2
2
i=1
i=1
i=1
(60)
La quantità fra parentesi
I=
N
P
i=1
mi ri2 ,
(61)
è detta momento d’inerzia del corpo rigido rispetto all’asse di rotazione considerato. Si osservi che per
un corpo rigido le distanze dei punti materiali dall’asse di rotazione sono costanti, come ovviamente sono
costanti le loro masse, quindi il momento d’inerzia I è costante. Tale costante è naturalmente diversa da
corpo a corpo ma, in linea di principio6 , è calcolabile. Una volta che I sia noto, l’energia cinetica del corpo
rigido assume, in ogni istante, la semplice forma
EC =
1 2
Iω .
2
(62)
Anche il momento angolare del corpo rigido rispetto al centro di massa, LG , ammette una semplice espressione
in termini del momento d’inerzia. Per essere piú precisi tale relazione è semplice nel caso in cui il momento
della quantità di moto abbia la stessa direzione dell’asse di rotazione, cosa che qui si suppone. Sia Qi la
proiezione di Pi sull’asse di rotazione, in modo tale cioè che valga |Qi Pi | = ri (si veda la figura 4); allora,
osservando che GPi = GQi + Qi Pi , si può scrivere
LG =
N
X
i=1
N
X
GPi ∧ mi vi =
(GQi + Qi Pi ) ∧ mi vi .
(63)
i=1
6 Di
fatto il calcolo, anche per i corpi piú semplici, è facilmente eseguibile solamente utilizzando le tecniche dell’analisi
matematica e segnatamente il calcolo integrale.
11
ω
Pi
Qi
G
b
Figura 4: Il vettore velocità angolare per un corpo rigido.
Si osservi ora che tutti i vettori GQi sono paralleli alla direzione dell’asse di rotazione e quindi di LG , quindi
N
P
il vettore
(GQi ∧ mi vi ) è perpendicolare alla direzione di LG , quindi deve essere zero; rimane pertanto
i=1
LG =
N
X
(64)
Q i Pi ∧ m i v i .
i=1
Il modulo di questo vettore è
LG =
N
X
i=1
r i m i vi =
N
X
ri mi ωri = ω
i=1
N
X
mi ri2 ;
(65)
i=1
quindi
LG = Iω .
(66)
Il modulo del momento angolare è quindi, in ogni istante, il prodotto del momento d’inerzia per la velocità
angolare del corpo rigido. Notando che i vettori LG e ω hanno la stessa direzione e lo stesso verso, è possibile
scrivere la seguente equazione vettoriale
LG = Iω .
(67)
Osservazioni
1. Si arriva alla stessa conclusione calcolando il momento d’inerzia rispetto a qualunque altro punto
dell’asse di rotazione diverso da G7 .
2. In generale non è vero che il momento angolare abbia la stessa direzione dell’asse di rotazione: si pensi
ad esempio ad una sbarretta in rotazione attorno ad un asse in modo da formare con tale asse un
angolo costante; in tal caso il momento angolare è perpendicolare alla sbarretta e quindi non ha la
stessa direzione dell’asse di rotazione.
Se il momento angolare ha direzione diversa da quella dell’asse di rotazione la relazione che lo lega alla
velocità angolare è molto piú complessa e non viene discussa qui.
7 Il
lettore studioso fornisca una dimostrazione di questa affermazione.
12
3. Se il momento delle forze esterne agenti sul corpo rigido è nullo rispetto ad un certo polo, è noto
che il momento angolare rispetto al medesimo polo è costante; in particolare, se il momento delle
forze esterne è nullo rispetto a G allora il prodotto Iω è una costante. Questo spiega perché una
pattinatrice sul ghiaccio quando si rannicchia su sé stessa aumenta la propria velocità angolare: infatti
il momento della forza peso (che è l’unica forza esterna agente) è nullo in quanto passa per il centro
di massa, pertanto il momento angolare rispetto al centro di massa è costante; quindi quando la
pattinatrice, rannicchiandosi, diminuisce la distanza di alcune parti del proprio corpo (segnatamente le
braccia) dall’asse di rotazione, diminuisce il proprio momento d’inerzia (si osservi che, ovviamente, una
pattinatrice non è un corpo rigido), per la costanza del momento angolare deve aumentare la velocità
angolare ω.
È possibile scrivere la seconda equazione cardinale per il corpo rigido in termini del momento d’inerzia,
limitandosi al caso in cui valga la (67) e quindi l’asse di rotazione passi per G. L’equazione (26) può essere
scritta quindi
∆LG
∆(Iω)
∆ω
ME
=
=I
= Iα ,
(68)
G =
∆t
∆t
∆t
quindi il momento delle forza esterne rispetto al centro di massa è, in ogni istante, uguale al prodotto del
momento d’inerzia per l’accelerazione angolare.
Esiste una completa analogia fra la dinamica di traslazione del punto materiale e la dinamica di rotazione del
corpo rigido. Tale analogia è chiarita dalla seguente tabella, in cui, per semplicità, compaiono solo i moduli
dei vettori.
ANALOGIA FRA MOTO RETTILINEO E MOTO ROTATORIO
MOTO RETTILINEO
MOTO ROTATORIO
Spostamento lineare
∆s
Spostamento angolare
Velocità lineare
v = ∆s/∆t
Velocità angolare
Accelerazione lineare
a = ∆v/∆t
Accelerazione angolare
Massa
m
Momento d’inerzia
Forza
F = ma
Momento delle forze
Energia cinetica
mv 2 /2
Energia cinetica
Quantità di moto
mv
Momento della quantità di moto
∆θ
ω = ∆θ/∆t
α = ∆ω/∆t
I
M = Iα
Iω 2 /2
Iω
Usando la corrispondeza ora osservata è possibile determinare il lavoro fatto dalle forze esterne durante una
rotazione. Infatti, se per il moto di traslazione il lavoro è il prodotto della forza per lo spostamento, per il
moto rotatorio il lavoro è dato dal prodotto delle grandezze corrispondenti. In effetti si può dimostrare in
tutta generalità che se un corpo rigido in un intervallo di tempo ∆t ruota di un angolo ∆θ sotto l’azione di
un insieme di forze esterne di momento MO allora il lavoro di tali forze è dato da
Lrot = MO ∆θ .
(69)
Questa equazione può essere riscritta in una forma alternativa, che spesso si rivela piú conveniente in termini
della velocità angolare ω:
Lrot = MO · ω∆t ;
(70)
Anche per questo lavoro, come per il lavoro di traslazione vale il teorema dell’energia cinetica, ove per questa
si usi l’equazione (62). Vale cioè
1
1
Lrot = I ωf2 − I ωi2 .
(71)
2
2
E, ancora, nel caso in cui le forze esterne agenti siano conservative, vale la conservazione dell’energia
meccanica.
4.3
Dinamica rototraslatoria del corpo rigido.
In generale il moto di un corpo rigido può essere sempre considerata come il moto risultante del moto di
traslazione del centro di massa ed il moto di rotazione attorno al centro di massa. Il moto di traslazione è
13
regolato dal precedente teorema del centro di massa, equazione (35), mentre il moto di rotazione attorno al
centro di massa è regolato da quanto visto nel paragrafo precedente.
A titolo illustrativo si consideri l’esempio seguente.
Disco che rotola su un piano orizzontale. Si consideri un disco omogeneo di massa m e raggio r che
rotola su di un piano orizzontale, senza strisciare, tirato da una forza F agente sul centro di massa (si veda
figura la 5). Il moto può essere scomposto nel moto di traslazione del centro di massa piú quello di rotazione
attorno al centro di massa.
F
G
b
b
Fa
P
Figura 5: Il disco rotolante.
La condizione per cui il rotolamento avviene senza strisciare presuppone che il punto P di contatto fra il
disco e il suolo sia fermo. Ci si può convincere di questo fatto nel modo seguente.
La velocità di un punto del disco può essere pensata come somma della velocità del centro di massa piú la
velocità rispetto al centro di massa [si confronti l’equazione (52)]; nel caso di P si ha quindi
vp = vG + up = vG + ω ∧ GP .
(72)
Si osservi ora che ω e GP sono perpendicolari e quindi il loro prodotto è un vettore che ha come modulo ωr
e come direzione e verso quello opposto di vG ; quindi il modulo di vp è in ogni istante
(73)
vp = vG − ωr .
Si osservi ora che, se il disco rotola senza strisciare, nel tempo t impiegato dal disco a compiere un giro
completo, il centro di massa G si sposta di una distanza pari alla circonferenza. Il tempo impiegato a fare
2π
un giro con velocità angolare ω è t =
, mentre il tempo necessario a percorrere la distanza 2πr a velocità
ω
2πr
vG è t =
; uguagliando questi due tempi si ricava:
vG
2πr
2π
=
ω
vG
−→
vG = ωr ;
(74)
sostituendo questa espressione nell’equazione precedente si trova
vp = 0
(75)
che è quanto si doveva mostrare.
Si usino ora le equazioni (57) e (68) per determinare il moto del disco. Le forze esterne agenti sono F, la forza
d’attrito Fa , il peso P e la reazione vincolare perpendicolare al piano N; le ultime due sono uguali ed opposte
e non contribuiscono quindi alla risultante delle forze esterne (per questo non sono state rappresentate in
figura). Rimane quindi, scegliendo G come polo per il calcolo del momento totale delle forze esterne,
F + Fa = maG
,
14
ME
G = Iα .
(76)
Osservando che le due forze F ed Fa hanno versi opposti e che il momento di F rispetto a G è nullo, i moduli
delle equazioni precedenti si possono scrivere
F − Fa = maG
,
Fa r =
1
mr2 α
2
(77)
ove si è usato il fatto che il momento d’inerzia di un disco di massa m e raggio r rispetto ad un asse di
rotazione perpendicolare che passi per il suo centro è dato da (la dimostrazione non è elementare)
I=
1
mr2 .
2
(78)
Ora dalla (74) si ottiene
∆vG
∆ω
=
r
−→
∆t
∆t
e quindi la seconda delle precedenti equazioni diviene
Fa =
aG = αr
1
1
mrα = maG
2
2
(79)
(80)
sostituendo questa equazione nella prima si trova
F =
3
maG .
2
(81)
Questa equazione consente, nota la forza agente, di determinare l’accelerazione con cui si muove il suo centro.
Si osservi che la costante di proporzionalità fra forza e accelerazione non è la massa, ma i tre mezzi di questa.
È possibile calcolare ora il lavoro totale compiuto sul disco.
Si osserviche la forza d’attrito agisce sul punto P che, come visto sopra, è fermo; il suo lavoro è quindi nullo.
Il lavoro totale è quindi quello di F:
L = F · ∆s = F ∆s
(82)
Supponendo, per semplicità, che il disco sia inizialmente fermo, lo spazio percorso con accelerazione costante
aG è dato, in termini della velocità finale v, dall’equazione
v2
2aG
(83)
3
v2
3
maG
= mv 2 .
2
2aG
4
(84)
∆s =
quindi, usando la (81),
L=
Per il calcolo dell’energia cinetica finale si usa il teorema di König (56), osservando che il moto nel sistema
del centro di massa è rotatorio e la sua energia cinetica è data dalla (62):
EC =
1
1
1 1
v2
3
mvG2 + Iω 2 =
mr2 G2 = mvG2 ,
2
2
2 2
r
4
(85)
ove sono state usate la (78) e la (74). Come si vede il lavoro compiuto è uguale alla energia cinetica, come
richiesto.
15