Convertitore di potenza a tiristori DCS 500
per azionamenti in c.c.
da 25 a 5200 A
da 6 a 5000 kW
Descrizione del sistema
DCS 500B / DCF 500B
Hints for printing:
A4-format from page 1...56 (System description + Software structure diagrams A4)
A3-format from page 57...60 (Software structure diagrams)
A1-format page 61 (Software structure overview)
These hints will not be printed!
3ADW000066R0904 DCS500 System description i i
Tecnologia avanzata, prestazioni elevate e soluzione user friendly
La serie DCS 500 è una gamma completa di convertitori in c.c. caratterizzati da alte prestazioni e affidabilità,
destinati all'alimentazione e al controllo di armature di
macchine in c.c.
DCA 500 è un modulo convertitore DCS 500 montato
in un armadio noto come "Common Cabinet" ( si veda
documentazione a parte).
DCF 500 è un modulo DCS 500 modificato per
l'alimentazione di utenti diversi dai circuiti di indotto
delle macchine in c.c. (ad esempio carichi induttivi
come avvolgimenti di campo di motori, magneti, ecc.).
Per progetti di revamping , ABB ha introdotto DCR 500,
uno speciale "kit di ricostruzione" che consente di ammodernare i vecchi sistemi di potenza in c.c. con un nuovo
front end digitale avanzato (si veda documentazione a
parte).
STRUMENTI
• CMT-Tool è uno strumento di messa in servizio e
manutenzione di facile utilizzo che consente un
risparmio di tempo, costo e fatica per le attività di
programmazione, messa in servizio, monitoraggio e
manutenzione dell'azionamento.
Sono disponibili diverse opzioni che assicurano all'utente un sistema rispondente ai più elevati requisiti
tecnici e alle maggiori aspettative di performance, conforme a numerosi standard di sicurezza.
L'elettronica di controllo comune a tutta la linea consente di ridurre i pezzi di ricambio, le scorte e l'addestramento.
Vasta gamma di applicazioni
industriali
I convertitori DCS, DCA, DCF e DCR sono compatibili con le applicazioni più esigenti, quali:
• Metalli
• Cellulosa e carta
• Movimentazione materiali
• Banchi prova
• Alimenti e bevande
• Stampa
• Plastica e gomma
• Impianti di trivellazione
• Applicazioni navali
• Ski lift
• Magneti
• Gruppi generatori
• Elettrolisi
• Carica batteria
• altri
• Data Logger • Studio degli andamenti • Memoria
guasti • Parametro / Segnali • Funzionamento locale
• GAD Tool (Graphical Application Designer, design
applicazioni grafiche) contiene un'estesa libreria di
blocchi funzione standard per la creazione di soluzioni software personalizzate adatte a predisporre la
documentazione nelle fasi di programmazione.
CMT e GAD costituiscono un efficiente sistema per le
attività di design, messa in servizio e manutenzione che
consentirà di ottenere risultati e performance ottimali.
II D 1-2
3ADW000066R0904 DCS500 System description i i
1
DCS 500 - tecnologia avanzata
❖ configurazione flessibile
❖ facilità d'uso
DCS 500 è un azionamento completamente programmabile atto a rispondere ai requisiti di qualsiasi applicazione. Si possono richiedere template come MasterFollower, Winder, ecc.
La Serie DCS 500 offre un assortimento completo di
moduli convertitori di potenza per valori di corrente
compresi tra 25 A e 5200 A (per il collegamento in
parallelo a 12 impulsi, circa 10.000 A), idonei per tutti
i più diffusi sistemi trifase.
Tutti i nostri prodotti sono marcati CE.
DIN EN ISO 9001
DIN EN ISO 14001
Lo stabilimento per la produzione di azionamenti in
c.c. ABB Automation Products, Drives Division di
Lampertheim ha introdotto un sistema di gestione della
qualità conforme alla norma DIN EN ISO 9001 e un
sistema di gestione ambientale conforme a DIN EN
ISO 14001.
La Serie DCS 500 Drives è inoltre approvata ai sensi
dell'UL (Underwriters Laboratory).
Sono conformi anche con gli standard EMC per l'Australia e la Nuova Zelanda e sono marcati C-Tick.
Le unità DCS 500 sono idonee sia per le applicazioni di
tipo standard sia per quelle più complesse.
Appositi programmi PC assicurano all'operatore la
massima facilità d’uso e di controllo del sistema.
Dotazione hardware di base
❋ Ponte/i di tiristori (a partire dalla taglia A5, con
fusibili installati sui rami)
❋ Monitoraggio di temperatura per il ponte/i ponti di
tiristori
❋ Ventilatore
❋ Alimentazione per l'elettronica
❋ Scheda microprocessore
Componenti supplementari da integrare nel modulo
❋ Convertitore di potenza di campo
– ponte a diodi non controllato, 6A, oppure
– ponte a diodi/tiristori semicontrollato, 16A
❋ Scheda di comunicazione
❋ Pannello di controllo
Per personalizzare il pacchetto dell’azionamento in
funzione dei requisiti specifici dell’applicazione sono
inoltre disponibili i seguenti accessori
❋ Unità di alimentazione di campo esterne
❋ Schede di I/O aggiuntive
❋ Moduli d'interfaccia per diversi protocolli di comunicazione
❋ Filtri EMC (Electro Magnetic Compatibility, compatibilità elettromagnetica)
❋ Pacchetti software applicativi
❋ Programmi per PC
La funzionalità dell'azionamento può essere integrata
con diversi sistemi di controllo bus di campo, a partire
da semplici sistemi di controllo a livello di stabilimento.
La gamma dei prodotti
L’assortimento prevede 5 diverse dimensioni: C1, C2,
A5, A6 e A7. Siamo in grado di fornire sia moduli sia
armadi standard.
Modulo C1
DCA Convertitore in armadio
II D 1-3
3ADW000066R0904 DCS500 System description i i
Indice
II D
DESCRIZIONE DEL SISTEMA
1 DCS 500 - tecnologia avanzata ................... II D 1-3
2 Componenti del sistema DCS 500 ............. II D 2-1
Condizioni ambientali ................................................... II D 2-4
Moduli convertitori di potenza DCS 500 ...................... II D 2-5
Capacità di sovraccarico DCS 500 .............................. II D 2-8
Alimentazione di campo ............................................. II D 2-10
Opzioni per i moduli convertitori DCS 500B / DCF 500B. ... II D 2-12
Segnali di ingresso/uscita ......................................... II D 2-12
Pannello (pannello di controllo e visualizzazione) .... II D 2-15
Interfaccia seriale
per controllo del sistema tramite PC ......................... II D 2-16
per controllo azionamento ........................................ II D 2-16
2.6 Opzioni per l'azionamento .......................................... II D 2-18
Reattanza di rete per alimentazione di campo
e di indotto e di campo .............................................. II D 2-18
Caratteristiche dei fusibili per il circuito di indotto e
le alimentazioni di campo degli azionamenti in c.c....II D 2-20
Fusibili F1 semiconduttotr e portafusibili per linee di
alimentazione in CA e in CC ..................................... II D 2-22
Fusibili F3.x e portafusibili per alimentazione
di campo bifase ......................................................... II D 2-22
Trasformatore T3 per alimentazione di campo ......... II D 2-22
Induttanza di commutazione ..................................... II D 2-23
Trasformatore ausiliario T2 per sistema elettronico/
alimentazione ventilatore .......................................... II D 2-23
Rilevamento corrente residua ................................... II D 2-23
Filtri EMC .................................................................. II D 2-24
2.1
2.2
2.3
2.4
2.5
3 Come progettare l'azionamento ................ II D 3-1
3.1 Configurazione di azionamento standard con
campo interno .............................................................. II D 3-3
3.2 Configurazione di azionamento con campo interno
e riduzione dei componenti esterni ............................. II D 3-5
3.3 Configurazione di azionamento standard con
campo esterno semicontrollato (monofase) ................ II D 3-6
3.4 Configurazioni standard utilizzando un campo (trifase)
completamente controllato senza convertitore di indotto .... II D 3-7
3.5 Configurazione tipica per azionamenti ad alta potenza .... II D 3-8
3.6 Configurazione tipica per azionamenti ad alta potenza
collegati in parallelo in applicazioni Master-Follower
a 12 impulsi ................................................................. II D 3-10
4 Descrizione del software (Vers. 21.2xx) .... II D 4-1
4.1 Programma di progettazione GAD ............................... II D 4-1
4.2 Introduzione alla struttura e alla gestione .................... II D 4-2
Schemi della struttura software, incluso i commenti
II D 1-4
3ADW000066R0904 DCS500 System description i i
2
Componenti del sistema DCS 500
Descrizione del convertitore
Documentazione supplementare
La documentazione descrive la funzionalità dei convertitori DCS 500 e l'in3ADW000066
terazione di tutti i singoli componenti
che appartengono a un azionamento
Volume III
completo.
Technical Data
3ADW000165
E' a disposizione documentazione supplementare:
Volume IV D
Dati tecnici DCS 500, con informazioOperating Instructions
DCS 500B
ni su tutti i dati tecnici diretti per i
3ADW000055
componenti utilizzati all'interno e all'esterno del modulo convertitore.
Istruzioni operative DCS 500, con informazioni e
consigli per la messa in servizio dell'azionamento.
Se si utilizza un'unità di alimentazione di campo trifase
DCF 500 si consiglia di utilizzare la stessa documentazione dei convertitori di indotto DCS 500.
Volume II D1
System Description
DCA 500 / DCA 600
Volume II D
System Description
DCS 500B
Descrizione del sistema DCA 500 /
DCA 600 per armadi standard dotati di
azionamenti in c.c.
3ADW000121
Per coloro che desiderano
riprogrammare o adattare il
Volume V D1
3ADW000048
software del proprio azionaSW Description
DCS 500B
mento sono a disposizione
3ADW000078
una descrizione completa e dettagliata
della struttura software dell'azionamento e di tutti i
blocchi funzione disponibili.
Volume V D2
Application Blocks
DCS 500B
E' disponibile un Manuale di assistenza DCS 500
destinato ai tecnici dell'assiVolume VII A
stenza.
Technical Guide
Gli addetti alla progettazioDCS
Volume VI A
3ADW000163
ne e all'ingegnerizzazione di
Service Manual
DCS 500(B)/600
azionamenti potranno otte3ADW000093
nere una serie di informazioni a parte
relativamente all'installazione, al dimensionamento, ai
fusibili, ecc. degli azionamenti in c.c., denominate
"Guida tecnica".
Scopo della fornitura
La fornitura consiste nel modulo convertitore ed alcuni
accessori. Il documento Guida Rapida ed un CD ROM
con tutta la documentazione relativa al convertitore in
differenti lingue e le viti che permettono il cablaggio
degli accessori. Le EMC sono sempre incluse. Per i
convertitori C1 e C2 sono aggiunti un connettore per
collegare il ventilatore e le viti per fissare i cavi di
potenza. In funzione del tipo di costruzione saranno
consegnati con i convertitori le viti per i cavi di potenza
( A5 ), una chiave per aprire la portella ( tutti ) ed un tool
per cambiare i tiristori.
Parti addizionali C1, C2
Parti addizionali A5, A6, A7
Configurazione dell'azionamento
DO3
DO4
DO5
DO6
DO7
0V
2
3
4
5
6
7
8
Ready Running
Running
FREE
FREE
ON/OFF
DO2
RESET
3ADW000066R0904 DCS500 System description i i
1
Main contactor
Emergency Stop
II D 2-1
DO1
DI6
6
Fan Contactor
DI5
5
(DO8 on SDCS-POW-1)
X7: Digital OUT
Excitation contactor
DI4
4
FREE
+48 V
0V
DI3
3
Main contactor
DI7
DI2
2
Motor Fan
6
DI8
DI1
1
Converter Fan
5
9 10
9 10
POWER OUT +
4
SENSE Power out +
3
8
8
0V
2
7
7
SENSE 0 V
8
CH Z -
7
CH B -
6
CH Z +
5
CH A -
4
CH B +
3
X6: Digital IN
0V
CH A +
AO1
AO2
IACT
0V
Actual current
-10V
1
0V
9 10
Actual armature voltage AO 2
X5: Encoder
Actual speed AO 1
-
2
+10V
AI4
1
+
-
+
-
9 10
FREE AI 3
-
AI3
8
+
7
Torque reference AI 2
6
Main speed reference AI 1
5
+
AI2
4
8...30 V -
30...90 V -
AI1
3
TACHO +
2
90...270 V -
AITAC
1
X4: Analogue IN / OUT
FREE AI 4
X6: Analogue IN
Nel caso si vogliano riconfigurare i morsetti mediante
il software, si consiglia di leggere innanzi tutto la
descrizione del software e di informarsi sulle possibilità
presenti prima di iniziare. (Non modificare mai i morsetti se l'azionamento è ancora collegato alla rete!). Sarà
infine opportuno verificare che i morsetti ricevano i
segnali corretti.
RUN
Gli azionamenti DCS 500 sono programmabili e pertanto anche i morsetti con i relativi ingressi e uscite
possono essere modificati in termini di funzionalità.
Alla consegna del convertitore tutti i morsetti da X3: a
X7: sono impostati nella configurazione di default sotto
illustrata. Essa consente di collegare l'azionamento in
base all'esempio di collegamento (si veda il capitolo 4)
senza alcuna modifica.
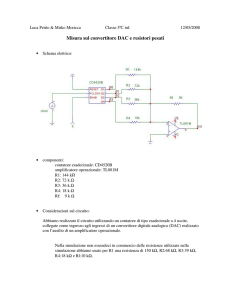
Panoramica globale dei componenti del convertitore d'armatura
M
- det ai l ed descri pt i on see chapt er 7. 1
ingresso / uscita analogica
M
7. 1
FEX 1
*
K5
Fig. 2/1:
Questa descrizione dei componenti intende aiutare l’utente ad acquisire familiarità con il sistema. I componenti principali sono tutti
riprodotti nella figura. Il nucleo del sistema è costituito dal modulo
convertitore di potenza DCS 500B.
II D 2-2
3ADW000066R0904 DCS500 System description i i
7
PS5311
2
5
3
8
Componenti del sistema DCS 500B
Da bus di
campo a PLC
8
IOB 2x
fibra ottica
Nxxx-0x
8
4
7
3
+24 V
fibra ottica
IOB 3
X16: X14:
X17:
X1: X2:
µP
X33:
IOE 1
PIN 51
PIN 20x
X13:
PIN 1x
X12:
POW 1
X37:
CON 2
CDP 312
SNAT 6xx
COM 5
X11:
DCS 50. B. . . . -. 1-21. . . . .
T2
PC +
CMT/DCS500
≤ 690V
F2
T
T
PIN 41
PIN 41
L1
K1
Q1
F1
≤ 1000V
Filtro EMC
Monitoraggio guasto terra
alternativa
Legenda
FEX 2
L3
K3
T3
F3
DCF 503A / 504A
ingresso / uscita digitale
DCF 501B / 502B
COM 5 - abbreviazione componenti
Alimentazione di campo trifase
* si veda Dati tecnici
i motori in c.c. si utilizza il convertitore DCS 500B per
l'alimentazione di indotto e un'alimentazione di campo
esterna o integrata per il controllo della corrente di
campo.
al campo
Alimentazione
Il convertitore di potenza DCS 500B con le relative
opzioni o accessori è specificamente studiato per il
controllo dei motori in c.c. e di altri carichi in c.c. Per
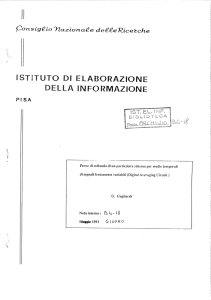
Panoramica globale dei componenti del convertitore di campo
Fig. 2/2:
ingresso / uscita analogica
- det ai l ed descri pt i on see chapt er 7. 1
7. 1
alternativa
ingresso / uscita digitale
Legenda
5
3
8
Da bus di
campo a PLC
8
IOB 2x
fibra ottica
Nxxx-0x
8
4
7
3
+24 V
PS5311
IOE 1
IOB 3
X16:
X17:
X1: X2:
µP
CDP 312
X33:
2
to
ica
di f
mo
PIN 20x
PIN 1x
X13:
X12:
POW 1
X37:
CZD-0x
CON 2
COM 5
DCF 50.B....-.1-21.....
SNAT 6xx
PC +
DDC-Tool
X11:
T2
F2
≤ 690V
fibra ottica
7
a X 16: DCS 500B
(convertitore di indotto)
L1
K3
Q1
F1
K5
M
Monitoraggio guasto terra
≤ 500V
Filtro EMC
a ingresso digitale
di DCF 500B
DCF 506
* si veda Dati tecnici
sistema nel complesso, i convertitori differiscono per
alcune schede, opzioni e modalità di cablaggio. (L'opzione CZD-0x non è sempre necessaria; si veda il
manuale Dati Tecnici).
COM 5 - abbreviazione componenti
L'hardware del DCS 500B è stato preso come base per
sviluppare il convertitore DCF 500B, che è usato per il
controllo di carichi induttivi elevati. Entrambi i converitori utilizzano lo stesso software. Considerando il
Componenti del sistema DCF 500B
II D 2-3
3ADW000066R0904 DCS500 System description i i
2.1 Condizioni ambientali
Collegamento della sezione di potenza
Tensione trifase:
da 230 a 1000 V, secondo IEC 60038
Deviazione di tensione:
±10% in continuo; ±15% per breve
durata *
Frequenza nominale:
50 Hz o 60 Hz
Deviazione frequenza statica: 50 Hz ±2 %; 60 Hz ±2 %
Campo frequenza dinamica: 50 Hz: ±5 Hz; 60 Hz: ± 5 Hz
Df/dt dinamico:
17 % / s
* = da 0,5 a 30 cicli.
Nota: La deviazione di tensione va tenuta in particolare considerazione
nel funzionamento rigenerativo.
Grado di protezione
Grado di protezione
Modulo convertitore e
dispositivi opzionali
(ad esempio induttanze,
porta fusibili, unità di
alimentazione di campo):
Convertitore in armadio:
IP 00
IP 20/21/31/41
Vernice di finitura
Modulo convertitore:
Convertitore in armadio:
NCS 170 4 Y015R
RAL 7035 grigio chiaro
Limiti ambientali
Temperatura aria di raffreddamento ammissibile
- all'ingresso aria dei convertitori:
da 0 a +55°C
con corrente CC nominale:
da 0 a +40°C
con corr. CC differente in acc. Fig. 2.1/2: da +30°C a 55°C
- Opzioni:
da 0 a +40°C
Umidità relativa (a 5…40°C):
dal 5 al 95%, senza condensa
Umidità relativa (a 0…+5°C):
dal 5 al 50%, senza condensa
Variazione della temp. ambiente:
< 0,5°C / minuto
Temperatura di magazzinaggio:
da -40 a +55°C
Temperatura di trasporto:
da -40 a +70°C
Grado d'inquinamento (IEC 60664-1, IEC 60439-1): 2
Altitudine del luogo di installazione:
<1000 m dal livello del mare:
>1000 m dal livello del mare:
Taglia Livello pressione suono LP
100%, senza riduz. di corrente
con riduzione di corrente,
si veda la Fig. 2.1/1
Vibrazione
(1 m distanza)
C1
C2
A5
A6
A7
in modulo
conv. in armadio
59 dBA
75 dBA
73 dBA
75 dBA
82 dBA
57 dBA
77 dBA
78 dBA
73 dBA
80 dBA
enclosed conv.
g, 2...150 Hz
g, 2...150 Hz
g, 2...150 Hz
g, 2...150 Hz
g, 2...150 Hz
in modulo
0,5 g, 5...55 Hz
1 mm, 2...9 Hz
0,3 g, 9...200 Hz
Riduzione corrente a (%)
Riduzione corrente a (%)
110
100
90
100
80
90
70
80
60
50
1000
70
2000
3000
4000
5000 m
30
Fig. 2.1/1: Effetto dell'altitudine s.l.m. del luogo di installazione
sulla capacità di carico del convertitore.
35
Norme armonizzate
Assicurazione produttore
Modulo conver titore
Direttiva Macchine
98/37/EEC
93/68/EEC
Direttiva Bassa Tensione
73/23/EEC
93/68/EEC
Direttiva EMC
89/336/EEC
93/68/EEC
Conver titore in
armadio
Dichiarazione di
incorporazione
EN 60204-1
[IEC 60204-1]
EN 60204-1
[IEC 60204-1]
Dichiarazione di Conformità
EN 60146-1-1
[IEC 60146-1-1]
EN 50178 [IEC --]
vedere inoltre
IEC 60664
EN 60204-1
[IEC 60204-1]
EN 60439-1
[IEC 60439-1]
EN 61800-3 ➀
[IEC 601800-3]
EN 61800-3 ➀
[IEC 611800-3]
➀ in conformità a
3ADW 000 032
➀ in conformità a
3ADW 000 032/
3ADW 000 091
Dichiarazione di Conformità
(Prevede la conformità a
tutte le istruzioni per
l'installazione relativamente
alla scelta e alla posa dei
cavi, ai filtri EMC o al
trasformatore dedicato.)
45
50
55°C
Fig. 2.1/2: Effetto della temperatura ambiente sulla capacità di carico del convertitore.
Conformità alle norme
Il modulo convertitore e i relativi componenti sono destinati all'uso in ambiente industriale. Nei paesi dello Spazio economico europeo, i componenti sono conformi ai requisiti
delle direttive UE, si veda la seguente tabella.
Direttiva Unione Europea
40
II D 2-4
3ADW000066R0904 DCS500 System description i i
Standard nord americani
Nell'America del nord i componenti del sistema sono conformi ai requisiti della seguente tabella.
Tensione
alimentazione
nominale
Convertitore in
modulo
Standards
Convertitore in armadio
Fino a
600 V
UL 508 C
Apparecchiature di
conversione di
potenza
CSA C 22.2 No. 14-95
Apparecchiature di
controllo
industriale,Prodotti
industriali.
Disponibile per moduli
convertitori includendo
unità eccitatrice di
campo.
Tipi con marcatura UL:
• vedere lista UL
www.ul.com /
certificate no.
E196914
• o a richiesta
UL/CSA types: a richiesta
Maggiore
di 600 V
Fino a
1000 V
EN / IEC xxxxx vedere
la tabella a sinistra.
Disponibile per moduli
convertitori includendo
unità eccitatrice di
campo.
EN / IEC types: a richiesta
(per dettagli vedere tabella
a sinistra)
2.2 Moduli convertitori di potenza DCS 500
I moduli convertitori di potenza hanno la configurazione modulare. Si basano sulla custodia che alloggia la
sezione di potenza con il circuito di smorzamento RC.
Sono disponibili sei diverse taglie (C1a/b, C2a/b, A5,
A6, A7), graduate in termini di campo di tensione e
corrente. Tutte le unità hanno un sistema di raffreddamento a ventola.
no essere integrate determinate parti del sistema elettronico, ad esempio l’alimentazione di campo per il motore o la scheda d’interfaccia . Per l’operatore è disponibile
una pulsantiera di visualizzazione/controllo, che può
essere collocata sul modulo del convertitore di potenza
oppure integrata nello sportello dell’armadio elettrico
per mezzo di un apposito kit di installazione.
La sezione di potenza è controllata dall’elettronica
dell’unità, che è identica per l’intera gamma di prodotti.
A seconda della specifica applicazione, nell’unità posso-
Sono disponibili anche accessori quali fusibili esterni,
reattori di linea e simili che consentono di configurare
un sistema di azionamento completo.
Variabili di riferimento
Le caratteristiche di tensione sono
indicate nella Tabella 2.2/1. Le caratteristiche della tensione in c.c. sono
state calcolate sulla base delle seguenti ipotesi:
• UVN = tensione di ingresso nominale, trifase
• Tolleranza di tensione ±10 %
• Caduta di tensione interna circa
1%
• Se, secondo le norme IEC e VDE
occorre tenere conto di una deviazione o di una caduta di tensione, la
tensione di uscita o la corrente di
uscita devono essere ridotte del fattore effettivo secondo la tabella sulla
destra.
Tensione collegaTensione in cc
mento sistema
(raccomandazioni)
UVN
Udmax 2-Q
Udmax 4-Q
230
380
400
415
440
460
480
500
525
575
600
660
690
790
1000
1190
265
440
465
480
510
530
555
580
610
670
700
765
800
915
1160
1380
Tabella 2.2/1:
240
395
415
430
455
480
500
520
545
600
625
685
720
820
1040
1235
Tensione in cc Classe di tensione
nominale
DCS 500
senza carico raccomandata
Udi0
y=
310
510
540
560
590
620
640
670
700
770
810
890
930
1060
1350
1590
4
4
4
4
5
5
5
5
6
6
6
7
7
8
9
1
Massima tensione in c.c. ottenibile per azionamenti DCS 500
con tensione di ingresso specificata.
Qualora siano richieste tensioni d'indotto superiori a quelle
consigliate, si consiglia di accertarsi scrupolosamente che
il sistema continui a operare in condizioni di sicurezza.
Applicazione
Convertitore indotto
Tensione di indotto max ammissibile in base a
Tipo di eccitatore di campo
DCF 504A
SDCS-FEX-1
SDCS-FEX-2A
DCF 503A/504A
DCF 501B
Potenza sempre positiva (Ua e Ia pos.).
Estrusore
Potenza quasi sempre negativa.
Svolgitore, carico sospeso
Potenza raramente negativa.
Macchina per stampa all’arresto
elettrico
2-Q
Udmax 2-Q
Udmax 2-Q
DCF 502B
-
2-Q
Udmax 4-Q
Udmax 4-Q
Udmax 4-Q
2-Q
-
-
Potenza positiva o negativa.
Banco prova
Potenza positiva, raramente negativa.
4-Q
Udmax 4-Q
Udmax 4-Q
Udmax 2-Q +
variare
parametro
software
-
4-Q
Udmax 4-Q
Udmax 2-Q +
variare
parametro
software
-
Tabella 2.2/2: Tensione di indotto massima ammissibile
II D 2-5
3ADW000066R0904 DCS500 System description i i
y→
Tipo di convertitore
x=1 → 2-Q
IDC [A]
x=2 → 4-Q
y=4 (400 V)
IAC [A]
y=5 (500 V)
P [kW]
y=6 (600 V)
P [kW]
P [kW]
4Q
2Q
4Q
2Q
4Q
2Q
4Q
2Q
DCS50xB0025-y1
DCS50xB0050-y1
DCS50xB0050-61
DCS50xB0075-y1
DCS50xB0100-y1
DCS50xB0110-61
DCS50xB0140-y1
25
50
50
75
100
110
140
25
50
50
75
100
100
125
20
41
41
61
82
90
114
20
41
41
61
82
82
102
10
21
12
23
13
26
15
29
31
42
35
47
39
52
44
58
58
58
73
73
DCS50xB0200-y1
DCS50xB0250-y1
DCS50xB0270-61
DCS50xB0350-y1
DCS50xB0450-y1
DCS50xB0520-y1
DCS50xB0680-y1
DCS50xB0820-y1
DCS50xB1000-y1
200
250
270
350
450
520
680
820
1000
180
225
245
315
405
470
610
740
900
163
204
220
286
367
424
555
670
820
147
184
200
257
330
384
500
605
738
83
104
84
105
104
130
104
131
145
187
216
282
340
415
146
188
219
284
344
418
182
234
270
354
426
520
183
235
273
354
429
522
DCS50xB0903-y1
DCS50xB1203-y1
DCS50xB1503-y1
DCS50xB2003-y1
900
1200
1500
2000
900
1200
1500
2000
734
979
1224
1632
734
979
1224
1632
498
623
830
558
698
930
624
780
1040
696
870
1160
DCF50xB0025-y1
DCF50xB0050-y1
DCF50xB0075-y1
DCF50xB0100-y1
DCF50xB0200-y1
DCF50xB0350-y1
DCF50xB0450-y1
DCF50xB0520-y1
25
50
75
100
200
350
450
520
25
50
75
100
180
315
405
470
20
41
61
82
163
286
367
424
20
41
61
82
147
257
330
384
10
21
31
42
83
145
187
216
12
23
35
47
84
146
188
219
13
26
39
52
104
182
234
270
15
29
44
58
104
183
235
273
4Q
2Q
31
35
69
70
169
172
281
284
563
938
y=7 (690 V)
P [kW]
4Q
2Q
630
648
720
1050
1400
1080
1200
1600
Tabella 2.2/3: Tabella delle unità DCS 500B / DCF 500B - modello C1, C2, A5
y→
Tipo di convertitore
y=4 (400 V) y=5 (500 V) y=6 (600 V) y=7 (690 V) y=8 (790 V) y=9 (1000V) y=1 (1190V)
IDC [A]
IAC [A]
1900
2050
2500
3000
1550
1673
2040
2448
DCS501B2053-y1
DCS501B2603-y1
DCS501B3303-y1
DCS501B4003-y1
DCS501B4803-y1
DCS501B5203-y1
Conv. a 4 quadranti
DCS502B1903-y1
DCS502B2053-y1
DCS502B2503-y1
DCS502B3003-y1
2050
2600
3300
4000
4800
5200
1673
2121
2693
3264
3917
4243
1900
2050
2500
3000
1550
1673
2040
2448
DCS502B2053-y1
DCS502B2603-y1
DCS502B3303-y1
DCS502B4003-y1
DCS502B4803-y1
DCS502B5203-y1
2050
2600
3300
4000
4800
5200
1673
2121
2693
3264
3917
4243
Conv. a 2 quadranti
DCS501B1903-y1
DCS501B2053-y1
DCS501B2503-y1
DCS501B3003-y1
P [kW]
P [kW]
P [kW]
P [kW]
1160
1395
1190
1450
1740
1430
1750
2090
1640
2000
2400
P [kW]
P [kW]
P [kW]
➀
1740
1540
1870
1925
2330
2430
3030
1040
1250
1070
1300
1560
2310
2800
3360
2660
3220
3860
1280
1560
1880
1470
1800
2150
2300
2750
3040
3690
4420
2390
3030
3850
4670
su richiesta
su richiesta
su richiesta
2390
3030
3440
4170
su richiesta
su richiesta
su richiesta
1560
1375
1670
1720
2080
2170
2710
2060
2500
3000
2370
2875
3450
2060
2470
2720
3290
3950
➀ Questi convertitori sono forniti di opzioni. Ulteriori informazioni su richiesta.
Tabella 2.2/4: Tabella delle unità DCS 500B - modello A6/A7
Si possono ottenere livelli di corrente più elevati, fino a 15.000 A mediante
il collegamento di convertitori in parallelo - informazioni su richiesta.
II D 2-6
3ADW000066R0904 DCS500 System description i i
Modello C1
Modello C2
Tipo di
convertitore ➂
Dimensioni
AxLxP
[mm]
Modello A5
Peso
[kg]
Quote di rispetto
sopra/sotto/di lato
[mm]
Modello A6
Modello
Modello A7
Collegamento barra bus a
sinistra
Perdita di
potenza a 500V
PV [kW]
Collegamento
ventilatore
Fusibili
DCS50xB0025-y1
DCS50xB0050-y1
DCS50xB0050-61
DCS50xB0075-y1
DCS50xB0100-y1
DCS50xB0110-61
DCS50xB0140-y1
420x273x195
420x273x195
420x273x195
420x273x195
469x273x228
469x273x228
469x273x228
7,1
7,2
7,6
7,6
11,5
11,5
11,5
150x100x5
150x100x5
150x100x5
150x100x5
250x150x5
250x150x5
250x150x5
C1a
C1a
C1a
C1a
C1b
C1b
C1b
< 0,2
< 0,2
< 0,3
< 0,5
< 0,6
230 V/monofase
230 V/monofase
230 V/monofase
230 V/monofase
230 V/monofase
230 V/monofase
230 V/monofase
esterno
esterno
esterno
esterno
esterno
esterno
esterno
DCS50xB0200-y1
DCS50xB0250-y1
DCS50xB0270-61
DCS50xB0350-y1
DCS50xB0450-y1
DCS50xB0520-y1
DCS50xB0680-y1
DCS50xB0820-y1
DCS50xB1000-y1
505x273x361
505x273x361
505x273x361
505x273x361
505x273x361
505x273x361
652x273x384
652x273x384
652x273x384
22,3
22,3
22,8
22,8
28,9
28,9
42
42
42
250x150x5
250x150x5
250x150x5
250x150x5
250x150x10
250x150x10
250x150x10
250x150x10
250x150x10
C2a
C2a
C2a
C2a
C2a
C2a
C2b
C2b
C2b
< 0,8
< 1,0
< 1,3
< 1,5
< 1,8
< 1,6
< 2,0
< 2,5
230 V/monofase
230 V/monofase
230 V/monofase
230 V/monofase
230 V/monofase
230 V/monofase
230 V/monofase
230 V/monofase
230 V/monofase
esterno
esterno
esterno
esterno
esterno
esterno
esterno
esterno
esterno
DCS50xB0903-y1
DCS50xB1203-y1
DCS50xB1503-y1
DCS50xB2003-y1
1050x510x410
1050x510x410
1050x510x410
1050x510x410
110
110
110
110
300x100x20
300x100x20
300x100x20
300x100x20
A5
A5
A5
A5
< 5,2
< 5,5
< 6,6
230 V/1-ph
230 V/1-ph
230 V/1-ph
230 V/1-ph
DCS50xB1903-81
DCS50xB2053-y1
DCS50xB2503-y1
DCS50xB3003-y1
1750x460x410
1750x460x410
1750x460x410
1750x460x410
180
180
180
180
➂ x0x50
➂ x0x50
➂ x0x50
➂ x0x50
A6
A6
A6
A6
< 7.9
< 9.3
< 11.9
DCS50xB2053-y1L➀
DCS50xB2603-y1L➀
DCS50xB3203-y1L➀
DCS50xB3303-y1L➀
DCS50xB4003-y1L➀
DCS50xB4803-y1L➀
DCS50xB5203-y1L➀
1750x770x570
1750x770x570
1750x770x570
1750x770x570
1750x770x570
1750x770x570
1750x770x570
315
315
315
315
315
315
315
da installare
in armadio
A7
A7
A7
A7
A7
A7
A7
< 15
< 16
< 20
400...500 V/3-ph
a y = 4, 5, 8
500...690 V/3-ph
a y = 6, 7
400/690 V/3-ph
400/690 V/3-ph
400/690 V/3-ph
400/690 V/3-ph
400/690 V/3-ph
400/690 V/3-ph
400/690 V/3-ph
intern
intern
intern
intern
intern
intern
➀ Il collegamento sbarra bus sulla destra è opzionale.
Esempio di identificazione: collegamento sx DCS50xB5203-y1L; collegamento dx DCS50xB5203-y1R)
➁ x=1 → 2-Q; x=2 → 4-Q; y=4...9/1 → 400...1000 V/1190 V tensione di alimentazione
➂ L'aria in uscita deve uscire dall'armadio attraverso l'apposito canale
disponibile anche come convertitore di alimentazione di campo DCF50xB (per tensioni da 500 V si veda anche la tabella 2.2/3). I dati sono gli
stessi di quelli del convertitore di corrente di indotto DCS50xB
Tabella 2.2/5: Tabella delle unità DCS 500B
II D 2-7
3ADW000066R0904 DCS500 System description i i
2.3 Capacità di sovraccarico DCS 500
Per adeguare in maniera più efficace possibile i componenti del sistema di azionamento
al profilo di carico della macchina comandata, i convertitori di potenza d'indotto DCS
500B possono essere dimensionati tramite il ciclo di carico. I cicli di carico per macchine comandate sono definiti, fra l’altro, dalle norme IEC 146 o IEEE.
La tabella che segue riporta i valori di corrente per i tipi di carico in cc da DC I a DC IV (si veda il diagramma
della pagina seguente) per i moduli convertitori di potenza.
Tipo di unità
Tabella 2.3/1: Valori di corrente dei moduli convertitore di potenza con i corrispondenti cicli di carico.
Le caratteristiche tenengono conto di una temperatura
ambiente max di 40°C e di
un’altitudine max di 1000
metri s.l.m.
IDC I
400 V / 500 V
DCS 50xB0025-41/51
DCS 50xB0050-41/51
DCS 50xB0075-41/51
DCS 50xB0100-41/51
DCS 501B0140-41/51
DCS 502B0140-41/51
DCS 501B0200-41/51
DCS 502B0200-41/51
DCS 501B0250-41/51
DCS 502B0250-41/51
DCS 501B0350-41/51
DCS 502B0350-41/51
DCS 501B0450-41/51
DCS 502B0450-41/51
DCS 501B0520-41/51
DCS 502B0520-41/51
DCS 501B0680-41/51
DCS 502B0680-41/51
DCS 501B0820-41/51
DCS 502B0820-41/51
DCS 501B1000-41/51
DCS 502B1000-41/51
DCS 50xB1203-41/51
DCS 50xB1503-41/51
DCS 50xB2003-41/51
DCS 50xB2053-51
DCS 501B2503-41/51
DCS 502B2503-41/51
DCS 501B3003-41/51
DCS 502B3003-41/51
DCS 50xB3303-41/51
DCS 50xB4003-41/51
DCS 50xB5203-41/51
600 V / 690 V
DCS 50xB0050-61
DCS 501B0110-61
DCS 502B0110-61
DCS 501B0270-61
DCS 502B0270-61
DCS 501B0450-61
DCS 502B0450-61
DCS 50xB0903-61/71
DCS 50xB1503-61/71
DCS 501B2003-61/71
DCS 50xB2053-61/71
DCS 501B2503-61/71
DCS 502B2503-61/71
DCS 501B3003-61/71
DCS 502B3003-61/71
DCS 50xB3303-61/71
DCS 50xB4003-61/71
DCV 50xB4803-61/71
790 V
DCS 50xB1903-81
DCS 501B2503-81
DCS 502B2503-81
DCS 501B3003-81
DCS 502B3003-81
DCS 50xB3303-81
DCS 50xB4003-81
DCS 50xB4803-81
1000 V
DCS 50xB2053-91
DCS 50xB2603-91
DCS 50xB3303-91
DCS 50xB4003-91
1190 V
IDC II
IDC III
in
100 %
150 %
continuo 15 min
60 s
[A]
[A]
25
24
36
50
44
66
75
60
90
100
71
107
125
94
141
140
106
159
180
133
200
200
149
224
225
158
237
250
177
266
315
240
360
350
267
401
405
317
476
450
352
528
470
359
539
520
398
597
610
490
735
680
544
816
740
596
894
820
664
996
900
700
1050
1000
766
1149
1200
888
1332
1500
1200
1800
2000
1479
2219
2050
1550
2325
2500
1980
2970
2500
2000
3000
3000
2350
3525
3000
2330
3495
3300
2416
3624
4000
2977
4466
5200
3800
5700
100 %
15 min
IDC IV
150 %
120 s
100 %
15 min
23
42
56
69
91
101
132
146
155
173
233
258
306
340
347
385
482
538
578
648
670
736
872
1156
1421
1480
1880
1930
2220
2250
2300
2855
3669
35
63
84
104
137
152
198
219
233
260
350
387
459
510
521
578
732
807
867
972
1005
1104
1308
1734
2132
2220
2820
2895
3330
3375
3450
4283
5504
24
40
56
68
90
101
110
124
130
147
210
233
283
315
321
356
454
492
538
598
620
675
764
1104
1361
1450
1920
1790
2280
2080
2277
2795
3733
48
80
112
136
180
202
220
248
260
294
420
466
566
630
642
712
908
984
1076
1196
1240
1350
1528
2208
2722
2900
3840
3580
4560
4160
4554
5590
7466
[A]
200 %
10 s
[A]
50
100
110
245
270
405
450
900
1500
2000
2050
2500
2500
3000
3000
3300
4000
4800
44
79
87
193
213
316
352
684
1200
1479
1520
1940
1940
2530
2270
2416
3036
3734
66
119
130
290
320
474
528
1026
1800
2219
2280
2910
2910
3795
3405
3624
4554
5601
43
76
83
187
207
306
340
670
1104
1421
1450
1840
1870
2410
2190
2300
2900
3608
65
114
125
281
311
459
510
1005
1656
2132
2175
2760
2805
3615
3285
3450
4350
5412
40
75
82
169
187
282
313
594
1104
1361
1430
1880
1740
2430
2030
2277
2950
3700
80
150
165
338
374
564
626
1188
2208
2722
2860
3760
3480
4860
4060
4554
5900
7400
1900
2500
2500
3000
3000
3300
4000
4800
1500
1920
1910
2500
2250
2655
3036
3734
2250
2880
2865
3750
3375
3983
4554
5601
1430
1820
1850
2400
2160
2540
2889
3608
2145
2730
2775
3600
3240
3810
4334
5412
1400
1860
1710
2400
2000
2485
2933
3673
2800
3720
3420
4800
4000
4970
5866
7346
2050
2600
3300
4000
1577
2000
2551
2975
2366
3000
3827
4463
1500
2250
1900
2850
2428
3642
2878
4317
Dati su richiesta
1471
1922
2458
2918
2942
3844
4916
5836
x=1 → 2-Q; x=2 → 4-Q
II D 2-8
3ADW000066R0904 DCS500 System description i i
Tipi di carico
Ciclo di
funzionamento
DC I
Carico
convertitore
IDC I in continuo (IdN)
Applicazioni tipiche
Ciclo di carico
pompe, ventilatori
100%
DC II
DC III *
DC IV *
IDC II per 15 min e
1,5 * IDC II for 60 s
estrusori, convogliatori
IDC III per 15 min e
1,5 * IDC III for 120 s
estrusori, convogliatori
15 min
150% 100%
15 min
150% 100%
IDC IV per 15 min e
2 * IDC IV for 10 s
15 min
200% 100%
* Il ciclo di carico non è identico alla voce di menu Ciclo di servizio del programma DriveSize !
Tabella 2.3/2: Definizione dei cicli di carico
Se il ciclo di carico della macchina comandata non corrisponde a uno degli
esempi sopra elencati, si può individuare il tipo di convertitore di potenza più
idoneo utilizzando il programma software DriveSize.
Questo programma gira in ambiente Microsoft® Windows e consente di dimensionare il motore e il convertitore di potenza tenendo conto di fattori quali il tipo di
carico (ciclo di carico), la temperatura ambiente, l’altitudine, ecc. Il risultato del lavoro di progettazione viene
presentato sotto forma di tabelle, diagrammi e stampa
su carta.
Al fine di facilitare il più possibile la procedura di
avviamento,il software del convertitore è strutturato in
modo simile agli input del programma. Per questo
motivo molti dati - ad esempio alta corrente o tensione
di linea - possono essere utilizzati direttamente per il
convertitore.
Fig. 2.3/1: Schermata di inserimento dati visualizzata per il programma di dimensionamento.
Microsoft è un marchio registrato. Windows è un marchio di Microsoft Corporation.
II D 2-9
3ADW000066R0904 DCS500 System description i i
2.4 Alimentazione di campo
Dati generali
• Valori di corrente da 6 a 520 A
• Monitoraggio della corrente di campo min.
• Convertitore di potenza di campo esterno integrato
oppure armadio elettrico separato
• Modello monofase o trifase
• Controllo completamente digitale (ad esclusione
dell'SDCS-FEX-1)
ABB raccomanda di integrare un autotrasformatore nel
circuito di alimentazione del convertitore di potenza di
campo per regolare la tensione di ingresso in ca in base
alla tensione di campo e ridurre l’ondulazione nel circuito di campo.
Tutti i convertitori di potenza di campo (ad eccezione
dell’SDCS-FEX-1) sono controllati dal convertitore
del circuito d’indotto tramite un'interfaccia seriale a
una velocità di 62,5 kBaud. Questa interfaccia consente
di definire i parametri, controllare il convertitore di
potenza di campo ed effettuarne la diagnosi, e si configura quindi come un’opzione in grado di garantire un
controllo estremamente preciso. L’interfaccia consente
inoltre di controllare un’unità di alimentazione di
campo interna (SDCS-FEX-2A) e una esterna (DCF
501B/2B/3A/4A) oppure due unità esterne (2 x DCF
501B/2B/3A/4A). La relativa funzione software che si
rende in tal caso necessaria è disponibile in tutti i
convertitori di potenza in c.c.
Tipi di convertitore di campo
SDCS-FEX-1
SDCS-FEX-2A
• Ponte a diodi
• Corrente nominale 6 A
• Monitoraggio interno della corrente di campo min.,
senza necessità di regolazione.
• Costruzione e componenti progettati per una tensione di isolamento di 600 Vca.
• Tensione di uscita UA:
• Ponte a diodi/tiristori semincontrollato (1-Q)
• Controllo a microprocessore con sistema elettronico
alimentato dal convertitore del circuito d'indotto.
• Costruzione e componenti progettati per una tensione di isolamento di 600 Vca.
• E' possibile l'eccitazione a risposta rapida con un'idonea riserva di tensione; la diseccitazione avviene
mediante costante di tempo del campo.
• Tensione di uscita UA:
⎛ 100% + TOL ⎞
U A = UV * ⎜
⎟ * 0,9
⎝
100% ⎠
⎛ 100% + TOL ⎞
U A = UV * ⎜
⎟ * 0,9
⎝
100% ⎠
TOL = tolleranza della tensione di linea in %
UV = Tensione di linea
• Raccomandazione:
Tensione di campo ~ 0,9 * UV
TOL = tolleranza della tensione di linea in %
UV = Tensione di linea
• Raccomandazione:
Tensione di campo da 0,6 a 0,8 * UV
SDCS-FEX-1
SDCS-FEX-2A
II D 2-10
3ADW000066R0904 DCS500 System description i i
DCF 503A
DCF 501B / DCF 502B
• Ponte a diodi/tiristori semincontrollato (1-Q)
• Controllo a microprocessore con elettronica di controllo alimentata separatamente (115...230 V/monofase).
• Costruzione e componenti progettati per una tensione di isolamento di 690 Vca.
• Tensione di uscita UA:
Questo convertitore di potenza di campo viene utilizzato soprattutto per convertitori a circuito d'indotto
con corrente nominale compresa fra 2050 e 5200 A. E'
costituito da un convertitore a circuito d'indotto modificato.
• Tensione di uscita UA rispettivamente Udmax 2-Q :
vedere la tabella 2.2/1
• Raccomandazione:
Tensione di campo da 0.5 a 1.1 * UV
• I convertitori di alimentazione di campo trifase DCF
501B/502B richiedono l'installazione di un'unità attiva di protezione da sovratensioni DCF 506 per
proteggere la sezione di potenza da livelli di alta tensione inammissibili. L'unità di protezione da sovratensione DCF 506 è adatta ai convertitori DCF 501B
a due quadranti e ai convertitori DCF 502B a
quattro quadranti.
⎛ 100% + TOL ⎞
U A = UV * ⎜
⎟ * 0,9
⎝
100% ⎠
TOL = tolleranza della tensione di linea in %
UV = Tensione di linea
• Raccomandazione:
Tensione di campo da 0,6 a 0,8 * UV
DCF 504A
• con ponte a tiristori antiparalleli a controllo integrale (4-Q)
• L'unità è ammissibile - a differenza della Serie SDCSFEX-2A - per l'eccitazione / diseccitazione a risposta
rapida e per l'inversione di campo. Per l'eccitazione
a risposta rapida è necessaria un'idonea riserva di
tensione.
In condizione di stabilità, il ponte completamente
controllato funziona in modalità semicontrollata in
modo tale da mantenere il più basso possibile il
ripple di tensione. Con una corrente alternata di
campo rapida, il ponte funziona in modalità completamente controllata.
• La stessa struttura di DCF 503A
Assegnazione del convertitore di alimentazione
di campo all'unità di protezione da sovratensione
Conv. di alim. di campo
per campi motore
Protezione da
sovratensione
DCF50xB0025-51
...
DCF50xB0140-51
DCF506-0140-51
DCF50xB0200-51
...
DCF50xB0520-51
DCF506-0520-51
DCF 501B/502B
DCF506-140-51,
senza coperchio
DCF 503A / 504A
Tipo di unità
Corrente in
uscita IDC ➀
[A]
Tensione di
alimentazione
[V]
Luogo di
installazione
Note
SDCS-FEX-1-0006
SDCS-FEX-2A-0016
0,02...6
0,3...16
110V -15%...500V/monofase +10% interno
110V -15%...500V/monofase +10% interno
fusibile esterno, 6 A ⇒ IFnom
fus. est., reattanza per C1: 0,3 ... 8 A ➀, non idoneo per il modello A6/A7!
DCF 503A-0050
DCF 504A-0050
0,3...50
0,3...50
110V -15%...500V/monofase +10% esterno
110V -15%...500V/monofase +10% esterno
⎫alimentaz. ausiliaria (115...230V) se necessario tramite trasf. di
⎬adattamento; fusibile esterno; Misure AxLxP: 370x125x342 [mm]
⎭
DCF 50xBxxxx-51
si veda la
tabella 2.2/3
200V...500V/trifase
esterno
utilizzano l'hardware del DCS 500B e componenti hardware
aggiuntivi (DCF 506); alimentazione ausiliaria (115/230V)
➀ Per la riduzione di corrente, si veda anche la sezione 2.1 Condizioni ambiente Fig.: 2.1/1 e 2.1/2
Tabella 2.4/1: Tabella delle unità convertitori di campo
II D 2-11
3ADW000066R0904 DCS500 System description i i
2.5 Opzioni per i moduli convertitori DCS 500B / DCF 500B
Segnali di ingresso/uscita
Il convertitore può essere collegato in 4 diversi modi a
un'unità di controllo tramite collegamenti analogici/
digitali. Si può utilizzare solo una delle quattro opzioni
per volta. Oltre a questo, è possibile anche un'estensione degli I/O mediante il modulo SDCS-IOE 1.
SDCS-CON-2
SDCS-CON-2
X17:
X17:
X2:
X3:
X4:
X2:
X1:
X5:
X6:
1
X7:
X3:
X4:
2
X1:
X5:
1
X3: X1:
SDCS-IOB-2
4
Fig. 2.5/1: I/O tramite SDCS-CON2
I/O analogici:
standard
I/O digitali:
non isolati
Ingresso encoder:
non isolati
Fig. 2.5/2: I/O tramite SDCS-CON2 e SDCS-IOB2
I/O analogici:
standard
I/O digitali:
tutti isolati per mezzo di
fotoaccoppiatore/relè, lo stato
del segnale è mostrato dal
LED
SDCS-CON-2
SDCS-CON-2
X17:
X17:
X2:
X2:
X1:
X6:
X7:
2
X1: X2:
X1:
SDCS-IOB-3
X1: X2:
X3: X1:
SDCS-IOB-3
3
3
Fig. 2.5/3: I/O tramite SDCS-CON2 e SDCS-IOB3
I/O analogici:
maggiore capacità d'ingresso
I/O digitali:
non isolati
Ingresso encoder:
isolati
sorgente di corrente per: termocoppia PT100/PTC
SDCS-IOB-2
4
Fig. 2.5/4: I/O tramite SDCS-IOB2 e SDCS-IOB3
I/O analogici:
maggiore capacità d'ingresso
I/O digitali:
tutti isolati per mezzo di
fotoaccoppiatore/relè, lo stato
del segnale è indicato dal
LED
sorgente di corrente per: termocoppia PT100/PTC
II D 2-12
3ADW000066R0904 DCS500 System description i i
Descrizione dei segnali di I/O dell'SDCS-CON-2
Descrizione dei segnali di I/O dell'SDCS-IOB-2x & SDCS-IOB-3
Sistema meccanico
Sistema meccanico
installato nell'unità base
sempre esterno, all'esterno dell'unità base
Morsetti
Morsetti a vite per cavi a treccia fine, sezione max 2,5 mm2
Morsetti
Morsetti a vite per cavi a treccia fine, sezione max 2,5 mm2
Funzionalità
1 ingresso per tachimetrica
Risoluzione: 12 bit + segno; ingresso differenziale; campo modo
comune ±20 V
3 campi da 8...30...90...270 V- con nmax
Funzionalità dell'SDCS-IOB-3
1 ingresso per tachimetria
Risoluzione: 12 bit + segno; ingresso differenziale; campo modo
comune ±20 V
Campo 8 V- con nmax; se si utilizzano tensioni della tachimetrica più
elevate è necessario utilizzare la scheda di adattamento per tachimetrica PS 5311.
4 ingressi analogici
Tutti ingressi differenziali; costante temporale del condensatore di
livellamento ≤2 ms
Ingresso 1: Campo -10 V/-20 mA...0...+10 V/+20 mA; 4... 20 mA
monopolare; RE = 200 kΩ/ 500Ω/ 500Ω; Risoluzione: 12 bit + segno;
campo modo comune ±20 V
Ingressi 2+3: Campo come per ingresso 1, inoltre -1 V...0...+1 V
RE = 200 kΩ/ 500Ω/ 500Ω/ 20kΩ; Risoluzione: 11 bit + segno; campo
modo comune con -1 V...0...+1 V campo ±10 V, altrimenti ±40 V
Ingresso 4: Campo come con ingresso 1
RE = 200 kΩ/ 500Ω/ 500Ω; Risoluzione: 11 bit + segno; campo modo
comune ±40 V
Rilevamento corrente residua in combinazione con ingresso analogico 4 (somma delle correnti di fase ≠ 0)
2 uscite
+10 V, -10 V, IA ≤ 5 mA ciascuna; a prova di cortocircuito di lunga durata
per alimentazione tensione potenziometro di riferimento
1 uscita analogica
Retroazione di corrente bipolare - della sezione di potenza; disaccoppiata IdN ⇒ ±3 V (con guadagno = 1); IA≤ 5 mA, UAmax = 10 V, il guadagno
può essere regolato per mezzo di un potenziometro fra 0,5 e 5, a prova
di cortocircuito
2 uscite analogiche
Campo -10...0...+10 V; IA ≤ 5 mA; a prova di cortocircuito
Il segnale di uscita e l'adattamento con fattore di scala possono essere
selezionati tramite software
Risoluzione: 11 bit + segno
Sorgente di corrente per valutazione elementi PT 100 o PTC
IA = 5 mA / 1,5 mA
1 ingresso per generatore di impulsi
Alimentazione in tensione, corrente in uscita, campo di ingresso: come
per IOB1; Ingressi isolati elettricamente a partire da 0 V (collegamento
a terra della custodia) tramite fotoaccoppiatore e sorgente di tensione.
4 ingressi analogici
Campo -10...0...+10 V, 4...20 mA, 0...20 mA
Tutti configurati come ingressi differenziali; RE = 200 kΩ; costante
temporale del condensatore di livellamento ≤2 ms
Ingresso 1: Risoluzione: 12 bit + segno; campo modo comune ±20 V
Ingressi 2, 3, 4: Risoluzione: 11 bit + segno; campo modo comune
±40 V
Sorgente di corrente per termocoppia PTC controllo tramite jumper
e ingresso 2
2 uscite
+10 V, -10 V, IA ≤ 5 mA ciascuna; a prova di cortocircuito di lunga durata
per alimentazione tensione potenziometro di riferimento
1 uscita analogica
Retroazione di corrente bipolare - della sezione di potenza; disaccoppiata IdN ⇒ ±3 V; IA≤ 5 mA, a prova di cortocircuito
2 uscite analogiche
Campo -10...0...+10 V; IA ≤ 5 mA
Il segnale di uscita e l'adattamento con fattore di scala possono essere
selezionati tramite software
Risoluzione: 11 bit + segno
1 ingresso per generatore di impulsi
Alimentazione in tensione per generatore di impulsi da 5 V/12 V/24 V
(a prova di cortocircuito di lunga durata)
Corrente di uscita con
5 V: IA ≤ 0,25 A
12 V: IA ≤ 0,2 A
24 V: IA ≤ 0,2 A
Campo di ingresso: 12 V/24 V: asimmetrica e differenziale
5 V: differenziale
Generatore di impulsi come alimentazione di corrente a 13 mA: differenziale
Il cavo di rete (impedenza 120Ω), va collegato a una frequenza di
ingresso max di ≤300 kHz
8 ingressi digitali
Le funzioni possono essere selezionate tramite software
Tensione di ingresso: 0...8 V ⇒ "segnale 0", 16...60 V ⇒ "segnale 1"
Costante temporale dell'adattatore di livellamento: 10 ms
RE = 15 kΩ
Il segnale si riferisce al potenziale della custodia
Tensione ausiliaria per ingressi digitali: +48 V-, ≤ 50 mA, a prova di
cortocircuito di lunga durata
7+1 uscite digitali
La funzione può essere selezionata tramite software
7 uscite: driver a relè con diodo a libera circolazione, limitazione di
corrente totale ≤ 160 mA, a prova di cortocircuito
1 uscita relè - su scheda gruppo di alimentazione SDCS-POW-1
(elemento con contatto NA: ca: ≤250 V/ ≤3 A / cc: ≤24 V/ ≤3 A o ≤115/
230 V/ ≤0,3 A) con protezione da componente VDR.
Funzionalità dell'SDCS-IOB-2x
Disponibile in 3 diverse configurazioni:
SDCS-IOB-21 ingressi per 24...48 V-; RE = 4,7 kΩ
SDCS-IOB-22 ingressi per 115 V AC; RE = 22 kΩ
SDCS-IOB-23 ingressi per 230 V AC; RE = 47 kΩ
Morsetti
Morsetti a vite con sezione max di 4 mm2
8 ingressi digitali
Le funzioni possono essere selezionate tramite software
Lo stato del segnale è indicato da un LED
completamente isolati tramite fotoaccoppiattori
Tensione di ingresso:IOB-21:0...8 V ⇒ "segnale 0", 18...60 V ⇒ "segn. 1"
IOB-22:0...20 V⇒ "segnale 0", 60...130 V ⇒ "segn. 1"
IOB-23:0...40 V⇒ "segnale 0", 90...250 V ⇒ "segn. 1"
Costante di tempo del filtro 10 ms (canali 1...6), 2 ms (canali 7+8)
Tensione ausiliaria per ingressi digitali: +48 V-, ≤ 50 mA, a prova di
cortocircuito di lunga durata; riferito al potenziale della custodia
8 uscite digitali
Le funzioni possono essere selezionate tramite software
Lo stato del segnale è indicato da un LED
6 delle 8 uscite sono isolate dal potenziale tramite un relè (elemento con
contatto NA: ca: ≤250 V/ ≤3 A / cc: ≤24 V/ ≤3 A o ≤115/230 V/ ≤0,3 A),
con protezione da componente VDR.
2 delle 8 uscita sono isolate dal potenziale tramite fotoaccoppiatore, protette
da diodo Zener (collettore aperto) a 24 Vcc esterno, IA ≤ 50 mA ciascuna.
II D 2-13
3ADW000066R0904 DCS500 System description i i
Si può aumentare il numero di ingressi digitali e analogici mediante la scheda SDCS-IOE1. Questo vale in
aggiunta alle soluzioni sopra menzionate.
SDCS-CON-2
X17:
X17:
X5:
X6:
X7:
7 x digital
4 x analog
1 x Tacho
5
X4:
8 x digital
X3:
2 x analog
SDCS-IOE-1
Pulsgeber
X2: X1:
Fig. 2.5/5: Ingressi aggiuntivi tramite SDCS-IOE1
Ingressi analogici:
estesi
Ingressi digitali:
tutti isolati mediante
fotoaccoppiatore, lo stato del
segnale è indicato dal LED
Sorgente di corrente per: termoprotettori PT100/PTC
Descrizione dei segnali di ingresso dell'SDCS-IOE-1
Sistema meccanico
sempre esterno, all'esterno dell'unità base
Morsetti
Morsetti a vite per cavi a treccia fine, sezione max 2,5 mm2
Funzionalità
7 ingressi digitali
Le funzioni possono essere selezionate tramite software
Lo stato del segnale è indicato tramite un LED
Tensione d’ingresso: 0...8 V ⇒ “segnale 0”, 16...31 V ⇒ “segnale 1”
Isolato dall’elettronica dell’unità tramite fotoaccoppiatori
Dal punto di vista del potenziale, suddivisi in due gruppi (DI 9...DI 12 e DI 13...DI 15)
Costante temporale del condensatore di livellamento: 2 ms
2 ingressi analogici
Tutti configurati come ingressi differenziati; campo modo comune ±40 V
Range -10 V/-20 mA...0...+10 V/+20 mA; 4... 20 mA unipolare
RE = 200 kΩ /500 Ω /500 Ω
Risoluzione: 11 bit + segno
Ingresso 2: campo come per ingresso 1,
inoltre -1 V/-2 mA...0...+1 V/+2 mA, e campo modo comune ±40 V, RE = 20 kΩ
Sorgente di corrente per valutazione elementi PT 100 o PTC
IA = 5 mA / 1,5 mA
I segnali si riferiscono al potenziale della custodia
Nota:
Se non diversamente specificato, tutti i segnali si riferiscono a un potenziale di 0 V. All’interno del sottogruppo di alimentazione (SDCS-POW-1) e in tutte le altre
schede a circuiti stampati, questo potenziale è saldamente collegato alla custodia dell’unità tramite placcatura passante in corrispondenza dei punti di fissaggio.
II D 2-14
3ADW000066R0904 DCS500 System description i i
Pannello (pannello di controllo e visualizzazione)
Descrizione del pannello
Il pannello di controllo e visualizzazione CDP 312
comunica con il convertitore DCS 500 tramite un
collegamento seriale RS 485, a una velocità di trasmissione di 9,6 kBaud. La pulsantiera CDP 312 è un’opzione dell’unità DCS 500. Terminata la procedura di
messa in servizio, il pannello non è indispensabile per
eseguire le routine diagnostiche, poiché il sistema è
dotato di un display a 7 segmenti in grado di comunicare con l’utente, segnalando ad esempio la presenza di
errori.
• 16 pulsanti a membrana, suddivisi in tre gruppi di
funzioni
• Display a cristalli liquidi a quattro righe di 20
caratteri ciascuna
• Lingua: tedesco, inglese, francese, italiano, spagnolo
• Accessori opzionali del pannello CDP 312:
– cavo, separato dal convertitore di potenza; lunghezza 3 m
– kit per montaggio pannello nello sportello dell’armadio elettrico
Parametri
Selezione e regolazione di
tutti i parametri e segnali.
0 L
0,0 rpm
17 RAMP GENERATOR
08 ACCEL 1
20.0 s
Gruppo e
nome
Sottogruppo
e nome
00
Riga di stato
Funzione da
selezionare
Valore
ACT (Actual)
Richiama la visualizzazione dei valori di retroazione,
unitamente al gruppo dei segnali e al gruppo memoria.
Stato di
marcia
1 = Marcia
0 = Arresto
Numero di
Locazione
identificazio. di controllo
dell' azionam. L = locale
selezionato
= remoto
Riferimento
velocitá
(giri/min)
Riga di stato
0 L
0,0 rpm
00
SPEEED ACT
0,0 rpm
CONV CUR
0 A
U ARM ACT
0 V
Segnale effetivo
Nome e valore
Il cursore mostra
la riga selezionata
Stato contattore
principale
0 = aperto
1 = chiuso
Tasti doppie frecce
Consentono di cambiare gruppo. Nei modi di preimpostazione dei parametri e del riferimento, i tasti a
doppie frecce consentono di modificare il valore dei
parametri o l'impostazione del riferimento a una velocità dieci volte maggiore che non con i tasti a singola
freccia.
Locale/Remoto
Consente di selezionare la modalità di
controllo locale (pannello di controllo)
o a distanza.
Ripristino
Tasto di acquisizione d'errore.
1 = ultimo guasto
2 = penultimo guasto
99 = novantanovesimo
guasto in ordine
cronologico inverso
Nome guasto o
allarme
Tempo totale
dall'accensione
HHHH:MM:SS.ss
0 L
0,0 rpm
1 LAST FAULT
Emergency stop
3212:59:35:56
Funzione
Seleziona il modo di funzionamento; può essere utilizzato per eseguire operazioni particolari quali le
funzioni di caricamento o trasferimento dati oppure
per apportare modifiche a programmi applicativi.
Impostazione
contrasto display
0 L
0,0 rpm
UPLOAD
<==
DOWNLOAD
==>
CONTRAST
00
Azionamento
per estensioni successive
Enter
Da utilizzarsi nei modi seguenti:
Impostazione parametri: conferma un nuovo valore
parametrico
Visualizzazione segnale
del valore di retroazione: richiama il modo di selezione segnale corrente
Selezione segnale:
conferma la selezione e ritorna al modo di visualizzazione del segnale valore di
retro-azione
Tasti freccia
Consentono di selezionare i parametri all’interno
di un determinato gruppo. I valori dei parametri
e i riferimenti possono essere modificati nei modi
preimpostazione parametri e riferimento. Nel modo
visualizzazione segnali di retroazione, selezionare la
riga desiderata.
Avvio
Mette in funzione l'azionamento nel modo locale.
Stop
Disattiva l'azionamento nel modo locale.
00
Riferimento
Consente di attivare il modo di preimpostazione del
riferimento.
On
Nel modo locale attiva il contattore principale.
Disattivazione
Nel modo locale, disattiva il contattore principale.
Fig. 2.5/6: Tasti funzione e visualizzazioni del pannello remotabile di
controllo e visualizzazione. Il pannello può essere utilizzato anche
per caricare lo stesso programma in altri convertitori di potenza.
II D 2-15
3ADW000066R0904 DCS500 System description i i
Interfaccia seriale
Per il funzionamento, la messa in servizio, le funzioni
diagnostiche e di controllo sono disponibili diverse
interfacce seriali. Come già descritto nella sezione precedente, il sistema prevede un collegamento seriale con
il pannello di controllo e visualizzazione (X33:/X34:
sulla scheda di controllo SDCS-CON-2). Installando
la scheda di comunicazione opzionale SDCS-COM-5
sulla scheda di controllo SDCS-CON-2 si rendono
disponibili ulteriori interfacce seriali.
Entrambe le interfacce prevedono un collegamento a
fibre ottiche. Un canale viene utilizzato per l'interfacciamento tra azionamento e PC, l'altro per l'interfacciamento del bus di campo. Le tre interfacce seriali sono
indipendenti.
CDP 312
SDCS-CON-2
Nxxx
SDCS-COM-5
collegamento
elettrico
X16:
X34:
≤3m
al PLC
Alimentazione
V260
FCI
AC70
PC
Interfaccia
Interface
fibre ottica
fibre ottica
≤ 20 m
≤ 10 m
Funzionamento
Comando
Fig. 2.5/7: Opzioni per la comunicazione seriale
Controllo del sistema tramite PC
Controllo
Requisiti/raccomandazioni di sistema:
• PC Laptop dotato di sistema operativo Windows NT o Windows 2000 (PC
desktop su richiesta) (marchio Zeichen?)
• Disco rigido con memoria disponibile di 4 MB; ogni grafico memorizzato
richiede uno spazio di memoria supplementare di 500 kB.
• CD Drive
• Slot PCMCIA
Componenti richiesti:
• SDCS-COM-5 opzionale
• Pacchetto DDCTool 4.x per Windows NT, pacchetto DDCTool 4.x per
Windows 2000 (pacchetto DDCTool 4.0 per Windows XP su richiesta)
Il pacchetto contiene:
• CD rom con software di installazione
• Scheda PC SNAT624 (PCMCIA)
• Connettore NDPC-02 (interfaccia da SNAT624 per cavo in plastica a fibre
ottiche)
• Cavo in plastica a fibre ottiche (10 m)
Funzionalità:
• DDCtool avvia la parte di programma CMT/DCS 500 quando DCS500B è
collegato
• CMT/DCS 500 è il programma centrale (il nome verrà utilizzato in seguito come
riferimento incrociato) per funzioni di messa in servizio, diagnostica, manutenzione e risoluzione guasti nell'ambito di un collegamento punto-punto. Oltre alle
funzionalità offerte dal pannello di controllo CDP 312, vi sono altre funzioni
disponibili, che verranno descritte alla pagina seguente.
Componenti necessari:
• collegamento a fibre ottiche in plastica per distanze
fino a 20 m (distanze superiori su richiesta)
• modulo bus di campo Nxxx.0x
Funzionalità:
Bus di
campo
Profibus
CANopen
DeviceNet
ControlNet
ModBus
AC70 / FCI
Modulo
NPBA-12
NCAN-02
NDNA-02
NCNA-01
NMBA-01
-----
Numero di Possibilità
parole cicli- di scambio
che da/verso parametri
azionamento
≤ 6 ➀➁
Si
≤6➀
Si
≤6➀
Si
≤6➀
Si
≤6➀
Si
≤6➀
No
Baudrate
≤ 12 MB
≤ 1 MB
≤ 1 MB
≤ 5 MB
≤ 19,2 KB
≤ 4 MB
➀ Quattro di essi sono predefiniti mediante profilo azionamenti
a velocità variabile predisposto dalla Organizzazione utente
profibus; all'occorrenza possono essere modificati.
➁ Il modulo supporta PPO di tipo 1 - 5; in base al tipo di PPO
in uso verrà trasferito un numero inferiore di parole o saranno lasciate vuote
Per maggiori informazioni sullo scambio dei dati, si
rimanda al manuale separato.
II D 2-16
3ADW000066R0904 DCS500 System description i i
Controllo del sistema tramite PC (continuazione)
Il programma utilizza nove finestre di funzioni, che
consentono di modificare il programma applicativo on
line, di tenere sotto controllo le funzioni dell’azionamento, di modificare i valori dei parametri, di controllare l’azionamento e di monitorarne lo stato. Segue una
breve descrizione delle singole opzioni dei menu, alcune delle quali, a titolo esemplificativo, sono mostrate
così come appaiono sullo schermo.
Diagrams
Questa finestra mostra il diagramma a blocchi funzione
creato con il programma GAD. Se necessario, l’utente può
utilizzare questa finestra per visualizzare i valori dei parametri o dei collegamenti selezionati.
Connect
Questa opzione consente di eseguire funzioni di tipo speciale, come ad esempio il collegamento con il convertitore di
potenza o la configurazione del programma.
ParSig
Il display dei parametri e dei segnali consente all’utente di
visualizzare i valori di parametri e segnali in una tabella e di
modificarli. Una delle funzioni disponibili consente all’utente
di assegnare ogni parametro o segnale a un determinato
gruppo, creato in funzione delle proprie esigenze. Dopodiché, l’utente può selezionare solo determinati gruppi e
rintracciare o modificare i valori dei parametri o dei segnali
di tali gruppi.
Dlog
Il convertitore di potenza DCS 500 è in grado di registrare in
continuo un massimo di sei segnali conservandoli in una
memoria permanente a partire da una condizione di attivazione da impostare (livello, cronologia pre- e post-evento). Il
programma può quindi leggere questi valori in sequenza
cronologica per elaborarli ulteriormente. I valori sono disponibili sotto forma di tabella o di diagramma, in maniera
analoga a quanto descritto per l’opzione “Trending” e possono anche essere stampati in tali formati.
DrvFuncs
Questo schermo mostra all’utente la stessa visualizzazione e gli stessi pulsanti
della pulsantiera di visualizzazione e controllo CDP
312. Le funzioni dell’aziona-mento sono quindi identiche.
Trending
Questa finestra consente di rintracciare le caratteristiche dei
segnali dei parametri specificati. Si possono monitorare un
massimo di sei parametri. La finestra mostra i valori sotto
forma di grafico (curva).
Faults
Questo schermo mostra - in ordine cronologico - i messaggi
di errore correnti registrati per ultimi nella memoria degli errori.
Exit
Uscita dal programma.
Help
Descrizione dei parametri.
II D 2-17
3ADW000066R0904 DCS500 System description i i
Nota:
Per maggiori informazioni sul pacchetto software
CMT/DCS 500, si rimanda alla relativa documentazione, in cui sono descritte le possibilità e le
modalità di gestione del
programma.
2.6 Opzioni per l'azionamento
Reattanze di rete
per alimentazione d'indotto (DCS 50xB) e
di campo (DCF 50xB)
Se i convertitori di potenza utilizzano i tiristori, durante
la commutazione da un tiristore all’altro, la tensione di
linea viene cortocircuitata. Questo funzionamento provoca cadute di tensione nella rete (punto di collegamento). Per la connessione del convertitore di potenza alla
rete, può essere applicata una delle seguenti configurationi:
Linea
Configurazione A
Linea
Configurazione B
Nel convertitore di potenza per il
corretto funzionamento del circuito
Punto di
collegamento di smorzamento occorre un'impedenza min. dell'1%. Per soddisfare questo requisito si può utilizzare una
uk LR > 1%
reattanza di rete. Il valore non deve
quindi scendere al di sotto dell’1% uk
(tensione di cortocircuito relativa),
ma non deve neanche aumentare al di
sopra del 10% uk a causa delle considerevoli cadute di tensione aggiuntive che ne deriverebbero.
Se in corrispondenza del punto di
collegamento devono essere soddisfatte particolari condizioni (nome
come EN 61 800-3, azionamenti DC
Punto di
collegamento e AC sulla stessa linea, etc.), per selezionare la reattanza di rete occorre
LLR
applicare criteri differenti, che si riferiscono per lo più alla caduta di tensione come percentuale della tensione di alimentazione nominale.
L'impedenza totale di ZLine e ZLR costituisce l'impedenza di serie totale del sistema. Il rapporto tra l'impedenza
di rete e l'impedenza della reattanza di rete determina la
caduta di tensione nel punto di collegamento. In questi
casi si usano spesso induttanze di rete con un'impedenza del 4% circa.
LLine
Linea
Punto di
collegamento
Configurazione C
Se si utilizza un trasformatore di isolamento, spesso è possibile soddisfare
determinate condizioni di collegamento, come nel caso della configurazione B, senza dover utilizzare reattanze di rete aggiuntive. La condizione valida per la configurazione A
risulta in ogni caso soddisfatta poiché
il valore di uK ≥ 1%.
Configurazione C1
Qualora vi siano 2 o più convertitori alimentati da un
unico trasformatore dedicato, la configurazione dipenderà dal numero di azionamenti in uso e dalla loro
capacità di potenza. Se il sistema di azionamento comprende convertitori di tipo C1, C2, A5, A6 o A7, si
dovrà utilizzare una configurazione A o B, basata su
induttanze di comLinea
mutazione. In caso
vi siano solo due conPunto di
collegamento
vertitori di tipo A7
non sarà necessaria
alcuna induttanza di
commutazione in
LLR
LLR
LLR ....
quanto la struttura di
questi convertitori è
adattata al tipo di
cablaggio.
Netzdr_f.dsf
Con riferimento al convertitore di potenza:
Le reattanze di rete elencate nella tabella (2.6/1)
- sono state allocate alla corrente nominale delle
unità
- sono indipendenti dalla classificazione di tensione
del convertitore; per alcuni tipi di convertitore
viene utilizzata la stessa induttanza di rete per
tensioni di linea fino a 690 V
- si basano su un ciclo di lavoro
- possono essere utilizzate sia per convertitori DCS
500B che per DCF 500B
Per ulteriori informazioni consultare la pubblicazione:
Guida tecnica, capitolo sulle Reattanze di
rete
II D 2-18
3ADW000066R0904 DCS500 System description i i
Reattanze di rete L1
DCS Tipo
400V-690V
50/60 Hz
Induttanza Modello
di rete tipo
Fig.
configur. A
Induttanza
di rete tipo
configur. B
Modello
Fig.
DCS50xB0025-41/51
DCS50xB0050-41/51
DCS50xB0050-61
DCS50xB0075-41/51
DCS50xB0100-41/51
DCS50xB0110-61
DCS50xB0140-41/51
ND01
ND02
ND03
ND04
ND06
ND05
ND06
1
1
1
1
1
1
1
ND401
ND402
su richiesta
ND403
ND404
su richiesta
ND405
4
4
5
5
5
DCS50xB0200-41/51
DCS50xB0250-41/51
DCS50xB0270-61
DCS50xB0350-41/51
DCS50xB0450-41/51
DCS50xB0450-61
DCS50xB0520-41/51
DCS50xB0680-41/51
DCS501B0820-41/51
DCS502B0820-41/51
DCS50xB1000-41/51
ND07
ND07
ND08
ND09
ND10
ND11
ND10
ND12
ND12
ND13
ND13
2
2
2
2
2
2
2
2
2
3
3
ND406
ND407
su richiesta
ND408
ND409
su richiesta
ND410
ND411
ND412
ND412
ND413
5
5
5
5
5
5
5
5
5
DCS50xB0903-61/71
DCS50xB1203-41/51
DCS50xB1503-41/51/61/71
DCS50xB2003-41/51
DCS501B2003-61/71
ND13
ND14
ND15
ND16
ND16 *
3
3
3
3
3
su richiesta
su richiesta
su richiesta
su richiesta
su richiesta
-
* con raffreddamento forzato
Tabella 2.6/1: Reattanze di rete (per maggiori informazioni, si veda la
pubblicazione Dati tecnici)
Fig. 1
Fig. 4
Fig. 2
Fig. 3
Fig. 5
II D 2-19
3ADW000066R0904 DCS500 System description i i
Caratteristiche dei fusibili per il circuito di indotto e le alimentazioni di campo
degli azionamenti in c.c.
Generalità
Conclusione per l'alimentazione di indotto
Configurazione dell'unità
Gli elementi di protezione come i fusibili o gli elementi
di scatto da sovracorrente vengono utilizzati ogniqualvolta non sia possibile avere il completo controllo sulle
sovracorrenti. In alcune configurazioni, questo comporta
i seguenti quesiti: innanzitutto, in che posizione deve
essere integrato l'elemento di protezione? E, in secondo
luogo, in caso di quali guasti l'elemento in questione deve
assicurare protezione dagli eventuali danni?
Per ragioni di costo, in alcune applicazioni si utilizzano
fusibili standard anziché i più costosi fusibili per semiconduttori. In condizioni operative normali e stabili,
questa scelta è comprensibile e accettabile, purché si
possano escludere possibilità di guasti.
Alimentazione in c.a.: pubblica / rete di impiatno
Armadio
2
3
.
.
.
.
.
.
Per alimentazione
di campo si veda
la Fig. 2.6/2
M
2
In caso di guasto, comunque, la scelta del risparmio
può essere origine di costi consequenziali molto elevati.
L'esplosione di semiconduttori di potenza non solo può
distruggere il convertitore, ma anche provocare incendi.
Un'adeguata protezione da corto circuiti e guasti di
terra, come previsto dalla norma EN50178, è possibile
solo utilizzando fusibili per semiconduttori idonei.
Raccomandazioni ABB
Fusibili
semiconduttori
Fusibili
semiconduttori
Fig. 2.6/1 Disposizione degli elementi di scollegamento
nel convertitore con circuito di indotto
Per ulteriori informazioni consultare la pubblicazione:
Guida tecnica, capitolo relativo alla Scelta dei
fusibili
convertitore
DCS
convertitore
DCS
non regenerativo
a due quadranti
regenerativo
a due quadranti
resp. 4 quadranti
Fusibili
semiconduttori
M
Conforme ai principi di base su:
1 – Rischio di esplosione
2 – Guasto di terra
3 – Reti hardware
4 – Spinterometro
5 – Corto circuito
6 – Rigenerativo a due quadranti
II D 2-20
3ADW000066R0904 DCS500 System description i i
M
sì
sì
sì
sì
sì
sì
Conclusione per l'alimentazione di campo
Sostanzialmente, sia per l'alimentazione di campo che
per l'alimentazione del circuito di indotto, si applicano
condizioni simili. A seconda del convertitore di potenza
in uso (a ponte di diodi, a ponte semicontrollato, a
ponte a 4 quadranti completamente controllato), alcune delle sorgenti di guasto non sono sempre applicabili.
Per via delle speciali condizioni del sistema, come ad
esempio alimentazione tramite un autotrasformatore o
un trasformatore di isolamento, possono applicarsi
condizioni di protezione aggiuntive.
Le seguenti configurazioni sono relativamente frequenti:
Contrariamente all'alimentazione del circuito di indotto, per l'alimentazione di campo non si utilizzano mai
fusibili sul lato in c.c., in quanto in alcune circostanze
lo scatto di un fusibile potrebbe provocare danni ancora
più gravi della causa che lo ha determinato(sovracorrente
limitata ma prolungata; invecchiamento del fusibile;
problemi di contatto; ecc.).
Il fusibile F3.1 per semiconduttori ( azione extrarapida
) dovrebbe essere usato, se ci sono condizioni simili a
quelle per il circuito d'armatura, ad esempio la protezione dell'unità di alimentazione di campo e l'avvolgimento di campo.
F3.1
ND30 /
incorporato
2
Fig 2.6/2 Configurazioni delle alimentazioni di campo
I fusibili tipo F3.2 ed F3.3 servono da protezioni di rete
e non possono proteggere l'unità di alimentazione di
campo. Si possono utilizzare esclusivamente fusibili
HRC puri o interruttori di circuito miniaturizzati. I
fusibili per semiconduttori verrebbero ad esempio danneggiati irreversibilmente dalla corrente di spunto del
F3.2
trasformatore.
F3.1
F3.3
2
ND30 /
F3.1
incorporato
2
FF_ASP_b.dsf
Fig 2.6/3 Configurazioni delle alimentazioni di campo
II D 2-21
3ADW000066R0904 DCS500 System description i i
Fusibili F1per semiconduttori e portafusibile per linee di alimentazione in CA e in CC
(DCS 501B /DCS 502B - DCF 501B/DCF 502B)
Le unità sono suddivise in due gruppi:
Tipo di convertitore
Produttore / Tipo
Portafusibili
– unità di dimensioni C1 e C2 con correnDCS50xB0025-41/51
170M 1564
OFAX 00 S3L
te nominale fino a 1000 A, con necessità
DCS50xB0050-41/51
170M 1566
OFAX 00 S3L
DCS50xB0050-61
170M 1566
OFAX 00 S3L
di fusibili esterni
DCS50xB0075-41/51
170M 1568
OFAX 00 S3L
– unità di dimensioni A5, A6 e A7 con
DCS50xB0100-51
170M 3815
OFAX 1 S3
corrente nominale da 900 A a 5200 A,
DCS50xB0110-61
170M 3815
OFAX 1 S3
con fusibili a semiconduttori installati
DCS50xB0140-41/51
170M 3815
OFAX 1 S3
DCS50xB0200-41/51
170M 3816
OFAX 1 S3
internamente.
DCS50xB0250-41/51
170M 3817
OFAX 1 S3
La tabella a destra indica il tipo di fusibile in
DCS50xB0270-61
170M 3819
OFAX 1 S3
CA. in base al tipo di convertitore. Se il
DCS50xB0350-41/51
170M 5810
OFAX 2 S3
convertitore è dotato di fusibili in CC., è
DCS50xB0450-41/51/61 170M 6811
OFAX 3 S3
DCS50xB0520-41/51
170M 6811
OFAX 3 S3
consigliabile utilizzare lo stesso tipo di fusiDCS50xB0680-41/51
170M 6163
3x 170H 3006
bile utilizzato sul lato CA mettendoli sul più
DCS50xB0820-41/51
170M 6163
3x 170H 3006
ed il meno della linea. Per tutti i convertitori
DCS50xB1000-41/51
170M 6166
3x 170H 3006
di tipo costruttivo C1 e C2 si utilizzano
Tabella 2.6/2: Fusibili e portafusibili (per maggiori informazioni, si
fusibili di tipo a coltello, ad eccezione del
veda la pubblicazione Dati Tecnici)
modello più grande.
Fusibili F3.x e portafusibili per alimentazione di campo bifase
Si utilizzano diversi tipi di fusibili in base
alla strategia di protezione. I fusbili sono
dimensionati in base alla corrente nominale dell'alimentazione di campo. Se
l'unità di alimentazione di campo è collegata a due fasi della rete, dovranno
essere utilizzati due fusibili; qualora l'unità sia collegata a una fase e a un neutro,
potrà essere utilizzato un solo fusibile in
corrispondenza della fase. Nella tabella
2.6/3 sono elencate le correnti dei fusibili relativamente alla tabella 2.6/2.
I fusibili possono essere dimensionati in
base alla massima corrente di campo. In
tal caso si sceglierà il fusibile che corrisponde al livello di corrente di campo.
Conv. campo
Corrente
F3.1
F3.2
F 3.3
campo
SDCS-FEX-1 IF ≤ 6 A
SDCS-FEX-2A
170M 1558
OFAA 00 H10
10 A
SDCS-FEX-2A IF ≤ 12 A
170M 1559
OFAA 00 H16
16 A
SDCS-FEX-2A IF ≤ 16 A
DCF 503A
DCF 504A
170M 1561
OFAA 00 H25
25 A
DCF 503A
DCF 504A
IF ≤ 30 A
170M 1564
OFAA 00 H50
50 A
DCF 503A
DCF 504A
IF ≤ 50 A
170M 1565
OFAA 00 H63
63 A
Tipo di elementi di
protezione
Fusibili per
Tipo LV HRC
semiconduttori per 690 V; portaper portafusibili fusibile OFAX 00
di tipo OFAX 00
interruttore
per 500 V o
690 V
Tabella 2.6/3: Fusibili e portafusibili per alimentazione di campo bifase
Trasformatore T3 per alimentazione di campo in base ai livelli di tensione
Fig. 2.6/4: Autotrasformatore T3
La tensione di isolamento delle unità di alimentazione di campo è superiore alla tensione
operativa nominale (si veda il capitolo Alimentazioni di campo). Di conseguenza è possibile, nelle reti con tensione superiore a 500
V, alimentare la sezione di potenza del convertitore per l’alimentazione del circuito d’indotto direttamente dalla rete e utilizzare un autotrasformatore per adattare l’alimentazione di
campo alla propria tensione nominale. Inoltre, è possibile utilizzare l’autotrasformatore
per regolare la tensione di campo (ponte di
diodi SDCS-FEX-1) o per ridurre l’ondulazione della tensione. Sono disponibili diversi
tipi (tensioni del primario 400...500 V e
525...690 V), ciascuno con diversi valori di
corrente nominale.
Tipo di convertitore di
campo ≤ 500 V; 50/60 Hz
per corrente di campo
IF
Tipo di trasform.
50/60 Hz
SDCS-FEX-1
SDCS-FEX-2A
SDCS-FEX-2A
DCF503A/4A-0050
DCF503A/4A-0050
≤6 A
≤12 A
≤16 A
≤30 A
≤50 A
Uprim = ≤ 500 V
T 3.01
T 3.02
T 3.03
T 3.04
T 3.05
SDCS-FEX-1
SDCS-FEX-2A
SDCS-FEX-2A
≤6 A
≤12 A
≤16 A
Uprim = ≤ 600 V
T 3.11
T 3.12
T 3.13
DCF503A/4A-0050
DCF503A/4A-0050
≤30 A
≤50 A
Uprim = ≤ 690 V
T 3.14
T 3.15
Tabella 2.6/4: Dati dell'autotrasformatore (per maggiori informazioni si veda la pubblicazione Dati Tecnici)
II D 2-22
3ADW000066R0904 DCS500 System description i i
Induttanza di commutazione
Se si utilizza il convertitore di potenza di campo SDCSFEX-2A, occorre installare in aggiunta anche una reattanza di commutazione per garantire la conformità del
sistema ai requisiti di compatibilità elettromagnetica
(EMC). L'SDCS-FEX-1 (ponte di diodi) non richiede
alcuna induttanza di commutazione, mentre nei convertitori di potenza di campo DCF503A/504A la reattanza è già installata.
Convertitore
Reattanza
≤ 500 V; 50/60 Hz
SDCS-FEX-2A
ND 30
Tabella 2.6/4: Reattanza di commutazione (per maggiori
informazioni, si veda la pubblicazione Dati Tecnici)
Trasformatore ausiliario T2 per sistema elettronico/alimentazione ventilatore
Le unità della Serie DCS 500 necessitano di varie
tensioni ausiliarie, ad esempio l’elettronica dell’unità
richiede una tensione monofase da 115 V o 230 V, i
ventilatori una tensione monofase da 230 V o una
tensione trifase da 400 V/690 V, a seconda delle
dimensioni. Il trasformatore ausiliario T2 è specificamente studiato per alimentare il sistema elettronico
dell'unità e tutti i ventilatori monofase, compreso
quello del convertitore A5.
Tensione d'ingresso:
Tensione d'uscita:
Potenza:
380...690 V/monofase; 50/60 Hz
115/230 V/monofase
1400 VA
Fig. 2.6/5: Trasformatore ausiliario T2
Rilevamento corrente residua
Tale funzione è fornita dal software standard. Se necessario, deve attivarsi l'ingresso analogico AI4, cui dev'essere trasmesso un segnale di corrente trifase mediante
un trasformatore. Se l’aggiunta dei tre segnali di corrente è diversa da zero, compare un messaggio (per
maggiori informazioni, si veda la pubblicazione Dati
Tecnici).
II D 2-23
3ADW000066R0904 DCS500 System description i i
Filtri EMC
Per ulteriori informazioni consultare la pubblicazione:
Capitolo Guida tecnica: Installazione e
configurazione di un
azionamento elettrico
in conformità alla normativa EMC
Il seguente paragrafo descrive la selezione di componenti elettrici in conformità alla normativa EMC.
Lo scopo di tale normativa, com'è implicito nel nome,
consiste nell'assicurare la compatibilità elettromagnetica con altri prodotti e sistemi. Tale normativa è volta a
garantire che le emissioni dal prodotto in esame siano
al di sotto del livello che potrebbe danneggiare l'immunità all'interferenza di altri prodotti.
Nell'ambito della normativa EMC vanno considerati
due aspetti:
• l'immunità alle interferenze del prodotto
• le effettive emissioni del prodotto
La nornativa EMC prevede che gli aspetti relativi alla
compatibilità elettromagnetica siano valutati già nella
fase di sviluppo del prodotto; tuttavia non è possibile
predeterminare il grado di compatibilità elettromagnetica di un prodotto, poiché esso può essere misurato
solo quantitativamente.
Nota relativa alla conformità elettromagnetica
La procedura di conformità è responsabilità congiunta
del fornitore del convertitore e del produttore della
macchina o sistema che lo utilizza, in base alla rispettiva
responsabilità nell'espansione delle apparecchiature elettriche considerate.
Primo ambiente (area residenziale con industria leggera) con ottenibilità limitata
Non applicabile, poiché sono esclusi i canali commerciali generali di ottenibilità
Non applicabile
conforme
conforme
Rete a media tensione
Funzionante con rete
pubblica a bassa
tensione insieme ad
altri carichi
eterogenei..
Un trasformatore di isolamento
con schermatura messa a terra
e nucleo ferritico con messa a
terra si sostituiscono al filtro di
rete e alla reattanza di linea.
Verso altri carichi, ad esempio azionamenti
Rete pubblica a 400 V
con conduttore di
neutro e messa a terra
Reattanza di
linea
Filtro di rete
Convertitore
Convertitore
M
M
M
M
M
Funzionante con rete
pubblica a bassa
tensione insieme ad
altri carichi
eterogenei..
Fig. 2.6/5: Classificazione
II D 2-24
3ADW000066R0904 DCS500 System description i i
Funzionante con rete
pubblica a bassa
tensione insieme ad
altri carichi
eterogenei..
Verso altri carichi che devono essere protetti dai disturbi di sistema determinati dai
convertitori (interferenze alle alte frequenze e interruzioni di commutazione)
Convertitore
Area residenziale
alternativa
Convertitore
Verso altri carichi, ad esempio azionamenti
Reattanza di linea
+ condensatore Y
M
M
Rete pubblica a 400 V
con conduttore di
neutro e messa a terra
Filtro di rete
alternativa
Verso altri carichi, ad esempio azionamenti
Convertitore
Verso altri carichi che devono essere protetti dai disturbi di sistema determinati dai
convertitori (interferenze alle alte frequenze e interruzioni di commutazione)
Reattanza di
linea
M
Neutro con
messa a terra
Rete pubblica a 400 V
con conduttore di
neutro e messa a terra
Filtro di rete
Trasformatore di alimentazione per
area residenziale (valore nominale
di tensione ≤ 1,2 MVA)
Industria leggera
Reattanza di
linea
Neutro con
messa a terra
Convertitore
Rete a media tensione
Trasformatore di alimentazione per
area residenziale (valore nominale
di tensione ≤ 1,2 MVA)
Area residenziale
Un trasformatore di isolamento
con schermatura messa a terra
e nucleo ferritico con messa a
terra si sostituiscono al filtro di
rete e alla reattanza di linea.
Per assicurare la conformità agli obiettivi di protezione
della legge tedesca sulla compatibilità elettromagnetica
(EMVG) in sistemi e macchine, devono essere rispettate
le seguenti norme sulla compatibilità elettromagnetica:
Per quanto riguarda le interferenze emesse, sono applicabili le seguenti norme:
EN 61000-6-3 Norma specifica di base per emissioni nell'ambito dell'industria
leggera che può essere rispettata con dispositivi speciali (filtri di
rete, cavi di potenza schermati) nelle gamme di potenza inferiori
*(EN 50081-1).
EN 61000-6-4 Norma speciale di base per le emissioni in ambito industriale
*(EN 50081-2).
Norma di prodotto EN 61800-3
Norma EMC per azionamenti (PowerDriveSystem),
immunità alle interferenze ed emissioni in aree residenziali, zone industriali con insediamenti di industria leggera e presso stabilimenti industriali.
Per le interferenze emesse, sono applicabili le seguenti norme:
EN 61000-6-1 Norma specifica di base per l'immunità alle interferenze in aree
residenziali *(EN 50082-1)
EN 61000-6-2 Norma specifica di base per l'immunità alle interferenze in ambito
industriale. Se si ottempera a questa norma, la norma EN
61000-6-1 viene automaticamente rispettata *(EN 50082-2).
La norma va rispettata nell'ambito dell'UE per rispondere ai requisiti di compatibilità elettromagnetica di sistemi e macchine!
* Gli standard generici sono messi tra parentesi.
Classificazione
Norme
Secondo ambiente (industria) con ottenibilità limitata
Non applicabile
conforme
presso il cliente
conforme
conforme
Rete a media tensione
Trasformatore
del convertitore
(e schermatura
con messa a
terra se
necessario)
Rete a 400 V con
conduttore di neutro e
messa a terra; 3~ ≤ 400 A
I > 400 A
e/o
U > 500 V
Reattanza di
linea
Convertitore
Convertitore
Convertitore
Convertitore
alternativa
alternativa
alternativa
M
M
M
M
Funzionante con rete a bassa tensione insieme
ad altri carichi eterogenei, ad eccezione di
alcune tipologie di dispositivi di comunicazione
sensibili.
M
Reattanza di
linea
Reattanza di linea
+ condensatore Y
alternativa
Filtro di rete
Analisi EMC in base al caso
Neutro con
messa a terra
Trasformatore del
convertitore con
anello ferritico con
messa a terra
Area industriale
Verso altri carichi, ad esempio azionamenti
Area industriale
Rete a media tensione
Verso altri carichi, ad esempio azionamenti
Trasformatore di
alimentazione per area
residenziale (valore
nominale di tensione
≤ 1.2 MVA)
M
La seguente panoramica
utilizza la terminologia e
EN 61000-6-3 indica gli interventi richiesti in conformità alla
EN 61000-6-4
Norma di prodotto
EN 61800-3
EN 61000-6-2
Per i convertitori DCS
EN 61000-6-1
500B, i valori limite per
le interferenze emesse sono rispettati
purché vengano eseguiti gli interventi indicati. Tali interventi si basano
sul termine Ottenibilità limitata,
utilizzato nella norma (che significa
un canale commerciale in cui i prodotti in esame possono essere commercializzati solo da parte di fornitori, clienti o utilizzatori che siano in
possesso, singolarmente o congiuntamente, di esperienza tecnica in materia di compatibilità elettromagnetica).
EN 61800-3
M
M
Funzionamento con trasformatore del convertitore di potenza
separato. In presenza di altri carichi in corrispondenza dello
stesso avvolgimento del secondario, essi devono poter far
fronte alle interruzioni di comunicazione determinate dal
convertitore di potenza. In alcuni casi sono richieste reattanze di
commutazione.
Per i convertitori di potenza privi di
componenti aggiuntivi, è applicabile
la seguente avvertenza:
Si tratta di un prodotto con ottenibilità limitata ai sensi della norma
IEC 61800-3. Il prodotto può causare interferenze radio in aree residenziali; in tal caso potrebbe essere
necessario che l'operatore intervenga in modo adeguato (vedere schemi
a lato).
Questo schema riassuntivo non
illustra l'alimentazione di campo.
Per quanto riguarda i cavi di
corrente di campo, si applicano le
stesse norme che si utilizzano per i
cavi del circuito dell'indotto.
Legenda
Cavo schermato
Cavo non schermato con limitazione
II D 2-25
3ADW000066R0904 DCS500 System description i i
Filtro in una linea a terra (rete TN o TT con
messa a terra)
I filtri sono idonei solo per le linee a terra, ad esempio
le linee pubbliche europee a 400 V. Secondo la EN
61800-3, i filtri non sono necessari nelle linee industriali isolate dotate di un proprio trasformatore di alimentazione. Inoltre, in tali linee flottanti (reti IT), i filtri
sopra menzionati possono causare rischi per la sicurezza.
Filtri trifase
I filtri EMC sono necessari per limitare le interferenze
emesse, se un convertitore deve funzionare collegato ad
una rete pubblica in bassa tensione, in Europa ad
esempio con 400 V tra le fasi. Queste linee devono
essere dotate di un conduttore neutro a terra. ABB offre
filtri trifase di tipo idoneo per 400 V e 25 A...600 A, e
filtri da 500 V per le linee a 440 V per i paesi extraeuropei.
I filtri possono essere ottimizzati per le correnti reali del
motore:
IFiltro = 0,8 • IMOT max ; il fattore 0,8 rispetta l'ondulazione di corrente.
Le linee da 500 V a 1000 V non sono linee pubbliche.
Si tratta di linee locali all'interno delle officine, che non
alimentano componenti elettronici sensibili. Pertanto,
i convertitori non necessitano di filtri EMC se devono
essere utilizzati con un valore pari o superiore a 500 V.
Tipo di convertitore
IDC [A]
Tipo
costr.
Tipo filtro per y=4
Tipo filtro per y= 5
Tipo filtro per y=6 or 7
DCS50xB0025-y1
DCS50xB0050-y1
DCS50xB0075-y1
DCS50xB0100-y1
DCS50xB0140-y1
DCS50xB0200-y1
DCS50xB0250-y1
DCS50xB0270-61
DCS50xB0350-y1
DCS50xB0450-y1
DCS50xB0520-y1
25A
50A
75A
100A
140A
200A
250A
250A
350A
450A
520A
C1a
C1a
C1a
C1b
C1b
C2a
C2a
C2a
C2a
C2a
C2a
NF3-440-25
NF3-440-50
NF3-440-64
NF3-440-80
NF3-440-110
NF3-500-320
NF3-500-320
NF3-500-320
NF3-500-320
NF3-500-600
NF3-500-600
NF3-500-25
NF3-500-50
NF3-500-64
NF3-500-80
NF3-500-110
NF3-500-320
NF3-500-320
NF3-500-320
NF3-500-320
NF3-500-600
NF3-500-600
--------------NF3-690-600 ➀
--NF3-690-600 ➀
---
DCS50xB0680-y1
DCS501B0820-y1
DCS502B0820-y1
DCS50xB1000-y1
680A
740A
820A
1000A
C2b
C2b
C2b
C2b
NF3-500-600
NF3-500-600
NF3-690-1000 ➀
NF3-690-1000 ➀
NF3-500-600
NF3-500-600
NF3-690-1000 ➀
NF3-690-1000 ➀
---------
DCS50xB0903-y1
DCS50xB1203-y1
DCS50xB1503-y1
DCS50xB2003-y1
900A
1200A
1500A
2000A
A5
A5
A5
A5
NF3-690-1000 ➀
NF3-690-1000 ➀
NF3-690-1600 ➀
NF3-690-1600 ➀
NF3-690-1000 ➀
NF3-690-1000 ➀
NF3-690-1600 ➀
NF3-690-1600 ➀
NF3-690-1000 ➀
NF3-690-1000 ➀
NF3-690-1600 ➀
NF3-690-1600 ➀
≤ 3000A
A6
NF3-690-2500 ➀
NF3-690-2500 ➀
NF3-690-2500 ➀
➀ Filtro disponibile solo su richiesta
Filtri monofase per alimentazione di campo
Molte unità di alimentazione di campo sono convertitori monofase per una corrente di eccitazione fino a 50
A. Possono essere alimentati da due delle tre fasi di
ingresso del convertitore di alimentazione d'indotto. In
tal caso, l'unità di alimentazione di campo non necessita di un proprio filtro.
Se deve essere utilizzata la tensione tra fase e neutro (230 V
in una linea da 400 V), si rende necessario un filtro
separato. ABB offre filtri di questo tipo per 250 V e
6...30 A.
Tipo di convertitore Corrente in cc
dell'unità di
alimentazione
di campo
[A]
Tipo di filtro ➀
Umax = 250 V
SDCS-FEX-1
SDCS-FEX-2A
SDCS-FEX-2A
DCF 503A-0050
DCF 504A-0050
filtri ulteriori per
NF1-250-8
NF1-250-8
NF1-250-20
NF1-250-55
NF1-250-55
NF1-250-12
NF1-250-30
➀
6
8
16
50
50
12
30
I filtri possono essere ottimizzati per le correnti di campo
reali: IFiltro = ICampo
II D 2-26
3ADW000066R0904 DCS500 System description i i
3
Come progettare l'azionamento
Il presente capitolo contiene suggerimenti di progettazione per varie configurazioni di azionamento. Nella prima parte vengono presentati
gli schemi elettrici dei convertitori con tutte le possibili opzioni di alimentazione di campo. Nelle parti successive gli schemi elettrici sono
riportati solo per le configurazioni più comuni.
• Configurazione di azionamento standard con campo
interno (si veda il capitolo 3.1)
La prima configurazione mostra un azionamento controllato in
base alla velocità con un cablaggio esterno estremamente flessibile
e alimentazione di campo. Con questi componenti si adatta a quasi
tutti gli azionamenti nel campo di potenza più basso.
Questa configurazione può essere usata solamente con i tipi di
costruzione C1 - A5, poichè gli stack di potenza più grossi ( C4, A6,
A7 ) non permettono di incorporare un alimentatore di campo
interno.
• Configurazione di azionamento basata su campo interno con componenti esterni ridotti (si veda il capitolo 3.2)
La seconda configurazione utilizza gli stessi componenti di base
della prima, ma con cablaggio esterno ridotto.
Questa configurazione può essere usata solamente con i tipi di
costruzione C1 - A5, poichè gli stack di potenza più grossi ( C4, A6,
A7 ) non permettono di incorporare un alimentatore di campo
interno.
• Configurazione di azionamento standard basata su
campo esterno semi-controllato (monofase) (si veda il
capitolo 3.3)
La terza configurazione utilizza il cablaggio esterno della prima, ma
con un'unità di alimentazione di campo più potente e flessibile.
• Configurazione tipica per azionamenti ad altissima
potenza basati su due moduli convertitore in parallelo
con condivisione simmetrica del carico
Un'altra configurazione consiste nel collegamento in parallelo dei
convertitori. In questo caso convertitori dello stesso modello (A7)
vengono collocati uno accanto all'altro con collegamento diretto
delle rispettive morsettiere in c.a. e in c.c. Operano in tal modo
come un unico grande convertitore, che non è disponibile come
modulo standard indipendente. I sistemi di questo tipo utilizzano
schede a circuiti elettronici supplementari per funzioni di sicurezza
oltre che per l'interfacciamento e il monitoraggio dei convertitori.
Ulteriori informazioni su richiesta.
Trasformatore
di potenza dedicato
+
-
3
Questa configurazione può essere usata per tutti i tipi di costruzione.
• Configurazione standard che utilizza un campo interamente controllato (trifase) con convertitore di indotto
(si veda il capitolo 3.4)
La quarta configurazione mostra un'unità di alimentazione di
campo trifase DCF 501/2 come unità indipendente.
Questa configurazione mostra un sistema in modalità controllo
corrente di campo e viene utilizzata se qualsiasi tipo di alimentazione di campo motore in c.c. esistente deve essere passata a controllo
digitale con tutte le opzioni più moderne, ad esempio di collegamento seriale, ecc.
Vi sono applicazioni diverse dal campo, ad esempio magneti, che
possono essere controllate con questo tipo di impianto in modalità
di controllo tensione o corrente senza aggiungere altre componenti.
• Configurazione tipica per azionamenti ad alta potenza
(si veda il capitolo 3.5)
La quinta configurazione è utilizzata per azionamenti di dimensioni
ragguardevoli e si basa sui diagrammi utilizzati per le configurazioni
3.3 e 3.4. Ora tutti i componenti utilizzati per le altre due sono
riuniti con tutte le interconnessioni e gli interblocchi necessari. E'
adattato a modelli di convertitore A5 e C4. Il diagramma mostra i
componenti opzionali utilizzati per assicurare la conformità agli
standard UL.
• Revamping di impianto in c.c. preesistenti
In caso occorra modernizzare azionamenti esistenti, talvolta è
opportuno sostituirli con un nuovo azionamenti tra quelli mostrati
nelle prime configurazioni. Per ragioni di economia o di spazio in
alcuni casi viene mantenuto il gruppo di potenza esistente e viene
espansa solo la componente di controllo. Per questi casi è disponibile un kit di configurazione basato su schede elettroniche, utilizzate normalmente nei convertitori di tipo DCS-A7, detto kit di
revamping DCR.
Per il kit sono disponibili tutte le opzioni elencate e illustrate al
capitolo 2. L'uso di schede supplementari consente l'utilizzo del kit
per gruppi di alimentazione costituiti da un massimo di quattro
tiristori collegati in parallelo.
Per ulteriori informazioni si veda il manuale Selezione, installazione
e avviamento di kit di ricostruzione.
3
DCS ... xxxx ..Rxx .......
DCS ... xxxx ..Lxx .......
M
Figura 3/1:
Collegamento hardware in parallelo per correnti elevate
Figura 3/2:
Kit di ricostruzione
II D 3-1
3ADW000066R0904 DCS500 System description i i
• Applicazioni Master-Follower
- Azionamenti collegati in applicazioni Master-Follower
Se i motori devono funzionare alla stessa velocità / coppia spesso sono controllati
in modalità MASTER - FOLLOWER.
Gli azionamenti utilizzati per questo tipo di sistema sono dello stesso tipo ma
possono avere potenza variabile. Essi sono alimentati dalla stessa rete. Normalmente sono di numero illimitato.
In termini di controllo è necessario rispettare varie condizioni e requisiti.
Alcuni esempi di questo tipo sono disponibili su richiesta presso ABB Automation
Products GmbH.
Master
DCS 500B
Follower
DCS 500B
CON 2
CON 2
MASTERFOLLOWER
D1
C1
C1
M
D1
M
collegamento
via carico
Figura 3/3: Applicazione con due motori collegati meccanicamente
- Configurazione tipica per azionamenti ad alta potenza collegati in
applicazioni Master-Follower (due motori con un albero comune)
Y
Questa configurazione viene utilizzata spesso quando due motori devono condividere un carico al 50%. Essi vengono fissati meccanicamente uno all'altro
attraverso una trasmissione o altri dispositivi. I convertitori sono alimentati da un
trasformatore di linea a 12 impulsi con avvolgimenti del secondario separati, le cui
posizioni di fase variano di 30°el.
Ciascun motore è collegato al suo convertitore e al suo alimentatore di campo. I
convertitori si scambiano segnali per assicurarsi che ciascun motore assorba il 50%
del carico.
Questa configurazione presenta gli stessi vantaggi in termini di armoniche verso
la rete di un'applicazione standard 12 impulsi (si veda il punto successivo), ma non
richiede una reattanza T.
La messa in servizio va eseguita da personale esperto in grado di adattare il sistema
di controllo in base alla configurazione meccanica.
CON 2
D1
CON 2
C1
C1
M
D1
M
Motori in tandem
Figura 3/4: Applicazione a 12 impulsi con due motori collegati
meccanicamente
- Configurazione tipica per azionamenti ad alta potenza collegati in applicazioni Master-Follower in parallelo a 12 impulsi (si veda il capitolo
Y
3.6)
Questa configurazione mostra un sistema di azionamento a 12 impulsi collegati
in parallelo. Si tratta di un'opzione semplice per aumentare la potenza dell'azionamento. In base alle caratteristiche progettuali, in caso di guasto di un convertitore, è possibile prevedere il funzionamento di emergenza o di ridondanza.
Questi azionamenti utilizzano due convertitori a 6 impulsi identici e un'induttanza specificamente preposta a quest'uso detta reattanza T o induttanza a 12 impulsi
o reattanza di interfaccia. I convertitori sono alimentati da un trasformatore di
linea a 12 impulsi con avvolgimenti del secondario separati le cui posizioni di fase
differiscono di 30°el.
Un esempio è costituito dalla configurazione di trasformatore
∆ / /∆ . Questa configurazione determina armoniche di livello e di numero
d'ordine ridotto sul lato in c.a. Sono presenti solo l'11a, la 13a, la 23a, la 25a e la
35a armonica. Risultano ridotte anche le armoniche sul lato in c.c., e ne consegue
una maggiore efficienza. (L'alimentazione di campo non è visualizzata nello
schema elettrico 3.6. In base al tipo di alimentazione di campo selezionata, i
collegamenti alla rete, gli interblocchi e i collegamenti del controllo possono essere
desunti da qualsiasi altro schema elettrico che mostri l'alimentazione di campo
selezionata).
Non è possibile collegare due sistemi a 12 impulsi (2 convertitori, T-reactor e 1
motore) ad un singolo trasformatore per 12 impulsi! Per ulteriori informazioni, si
veda il Manuale Funzionamento a 12 impulsi.
∆
∆
Master
DCS 500B
Follower
DCS 500B
CON 2
CON 2
MASTERFOLLOWER
D1
C1
C1
D1
M
Figura 3/5: Applicazione in parallelo a 12 impulsi
II D 3-2
3ADW000066R0904 DCS500 System description i i
3.1
Configurazione di azionamento standard con campo interno
Collegando l'azionamento in base a questo schema si ottiene la massima flessibilità e il grado più elevato di funzioni di monitoraggio
standard effettuate dall'azionamento. Non sono necessarie modifiche software per adattare l'azionamento al cablaggio esterno.
A
C
L1
L1 N
L2
L3
Livelli di tensione
D
vedere descrizione L1 N
E
L1
L2 L3
T2
230V
1
1
1
F5
F7
F8
2
2
115V
2
K15
OFF
F1
690V
660V
600V
575V
F2
525V
500V
450V
415V
400V
380V
1
3
2
4
T3
500V
460V
415V
400V
F3
K10
K11
X96:2
START
ON
K21
K1
X2:4
13
F6
14
1
3
5
13
14
365V
350V
265V
250V
90V
60V
30V
X96:1
STOP
F6
I> I> I>
2
4
6
1
3
5
2
4
6
X2:5
1
EMER.
STOP
K20
K8
S1
1
3
2
4
K1
1
3
5
2
4
6
1
3
2
4
X1: 1
7
K3
K6
2
K20
K21
K6
K8
K3
K1
L1
K15
X96: 1
IN3
V5
OUT3
V6
IN1
V1
OUT1
V2
Scheda comunicazione (COM-x)
2
X99: 1
2
X2: 4
AITAC
_ +
AI1
_ +
AI2
_ +
5 6
AI3
_ +
2
3
4
5
6
7
8
9
2
3
U1
V1
W1 PE
M
~
Alimentazione
potenza (POW-1)
in base al tipo di unità è
possibile un'altra configurazione
Modulo
convertitore
AI4
_
+
+10V -10V
0V
X3: 1
X2: 1
DO8
S4
X33
5
Scheda controllo (CON-2)
L3
10 X4: 1
2
3
AO1 AO2 IACT
0V
4
5
6
DI1 DI2 DI3 DI4 DI5 DI6 DI7 DI8 +48V
0V
7
8
9
10
DO1 DO2 DO3 DO4 DO5 DO6 DO7
0V
0V
X6: 1
2
3
4
5
6
7
8
9
10
X7: 1
2
3
4
5
6
7
8
X5: 1...10
C1
D1
_
+
K6
ad esempio
interruttore
pressione a
modulo C4
S1
K1
X1: 5
+
3
_
K20
K10
2
K8
in presenza di morsetti intermedi
1
Unitá eccitatrice
di campo
(SDCS-FEX-1/2)
K11
K21
polarità indicate per funzionamento motore
T
M
+
U
V
W
M
3~
T
_
Figura 3.1/1:
Configurazione di azionamento standard con campo interno
• Selezione dei componenti
Per questo schema elettrico è stato selezionato un modello di convertitore DCS 500B da C1 / C2 / A5 (per i modelli A7 utilizzare lo schema 3.3 o superiori),
con un'alimentazione di campo SDCS-FEX-1 o 2A. Questa alimentazione di campo può essere utilizzata con tensione di linea fino a 500 V e produce una
corrente di campo fino a 6 / 16A. Per correnti di campo maggiori utilizzare un'unità di alimentazione di campo immediatamente superiore DCF503A/4A
(schema riportato al punto 3.3/1) o un'alimentazione trifase DCF 500B (schema riportato al punto 3.5/2).
• Alimentazione di potenza
Vi sono vari componenti che richiedono alimentazione di potenza:
- Sezione di potenza del convertitore:
da 200 V a 1000 V, in base al tipo di convertitore; si veda il capitolo 2
- Alimentazione di potenza dell'elettronica del convertitore: 115 V o 230 V, selezionato da ponticello
- Ventilatore raffreddamento convertitore:
230 V monofase; si veda la sezione Dati tecnici
- Alimentazione di campo sezione di potenza:
da 115 V a 500 V; con un autotrasformatore di isolamento fino a 600 V; si veda il
capitolo 2 e/o Dati tecnici
- Ventilatore raffreddamento motore:
in base ai requisiti locali / del produttore del motore
- Logica relè:
in base ai requisiti locali
Si utilizzano i fusibili F1 in quanto i modelli di convertitore C1 e C2 non li hanno integrati. Tutti i componenti, che possono essere alimentati a 115/230 V sono
stati associati e verranno forniti da un trasformatore di isolamento T2. Tutti i componenti sono impostati per un'alimentazione a 230 V o selezionati per tale
livello di tensione. I diversi utenti utilizzano fusibili separati. Purché T2 abbia le corrette variazioni del rapporto, esso può essere collegato all'alimentazione
di potenza utilizzata per alimentare la sezione di alimentazione del convertitore.
Lo stesso criterio vale per il circuito di alimentazione di campo. Sono disponibili due diversi tipi di trasformatori di accoppiamento. Uno può essere utilizzato
per tensioni di alimentazione fino a 500 V, l'altro per tensioni fino a 690 V. Non utilizzare variazioni del rapporto del primario a 690 V con alimentazione di
campo SDCS-FEX-1/2A!
In base alla tensione del ventilatore del motore, la potenza può essere alimentata dalla stessa sorgente utilizzata per la sezione di potenza del convertitore.
Nel caso in cui la potenza per A, D e E sia alimentata dalla stessa sorgente utilizzata per C, occorre decidere se i fusibili F1 possano o meno essere utilizzati
per due finalità (protezione della sezione di potenza + alimentazione di potenza ausiliaria) o no. Occorre inoltre verificare che gli utenti possano essere
alimentati con questa forma d'onda di tensione (si veda il capitolo Induttanze di rete) prima del collegamento a C. Se il convertitore è alimentato direttamente
da un trasformatore del convertitore ad alta tensione in corrispondenza di C, nella configurazione dell'azionamento occorre tenere conto di altre condizioni
(ulteriori dettagli saranno forniti su richiesta).
II D 3-3
3ADW000066R0904 DCS500 System description i i
• Controllo
La logica del relè può essere suddivisa in tre parti:
a: Generazione del comando ON/OFF e START/STOP:
I comandi rappresentati da K20 e K21 (relè di interfaccia blocco) può essere generato da un PLC e trasferito ai morsetti del convertitore mediante relè,
che produce isolamento galvanico, o utilizzando direttamente segnali a 24 V. Non è prettamente necessario utilizzare segnali cablati. Questi comandi
possono essere trasferiti anche mediante collegamento seriale. E' possibile realizzare anche una soluzione eterogenea, selezionando l'una o l'altra
possibilità per singoli segnali.
b: Generazione di segnali di controllo e monitoraggio:
Il contattore di potenza principale K1 per il circuito di indotto è controllato da un contatto a secco situato sulla scheda di alimentazione di potenza
dell'elettronica. Lo stato del contattore viene verificato dal convertitore mediante l'ingresso binario 3. Il contattore di alimentazione di campo K3 è
controllato dal contatto ausiliario K11, collegato a un'uscita binaria del convertitore. Le uscite binarie comprendono driver relè, in grado di emettere circa
50 mA ciascuno e una limitazione di corrente di circa 160 mA per tutte le uscite. I contattori K6 e K8 controllano i ventilatori dell'azionamento. Essi sono
controllati dal contatto ausiliario K10 (simile a K11). In serie con K6 è presente un contatto ausiliario dell'interruttore F6, che esegue il monitoraggio
dell'alimentazione del ventilatore motore. Per il monitoraggio dell'alimentazione del ventilatore del convertitore, il contatto del rilevatore di temperatura
viene utilizzato in serie con K8. I contatti ausiliari K6 e K8 sono utilizzati e collegati agli ingressi binari 1 e 2 per monitorare lo stato dell'alimentazione
del ventilatore da parte del convertitore. La funzione di K15 è descritta al punto seguente.
c: Modalità di arresto oltre a ON/OFF e START/STOP:
Questo capitolo cerca di illustrare la reazione dell'azionamento quando è attivato l'ingresso EMERGENCY_STOP (906) o COAST_STOP (905). Si prega
di considerare il cablaggio esterno utilizzato per questa spiegazione solo a titolo di esempio!
Per EMERGENCY STOP devono essere prese in considerazione varie condizioni preliminari. La presente descrizione riguarda la funzionalità e non
considera particolari funzioni di sicurezza in base al tipo di macchina.
In questo caso, selezionando emergency stop, l'informazione passa al convertitore mediante l'ingresso binario 5. Il convertitore si comporta di
conseguenza in base alla funzione programmata (arresto con funzione di rampa, limitazione di corrente o per inerzia). Se il convertitore non riesce ad
arrestare l'azionamento entro il limite temporale impostato da K15, il contatto ausiliario disinserisce la potenza di controllo. Per questa ragione i contattori
di potenza principali K1 e tutti gli altri vengono disattivati, con possibili guasti ai componenti (si vedano le Istruzioni operative). Questo pericolo può essere
minimizzato aggiungendo un tempo di ritardo supplementare (nelle parti evidenziate in grigio). In tal modo si rende disponibile un'altra modalità di arresto.
-
Il segnale di arresto di emergenza inizializza la funzione
di rampa di discesa all'interno del convertitore come sopra
descritto. Se l'azionamento si arresta entro il tempo stabilito da K15, il convertitore disattiva il contattore di potenza
principale K1. Se il convertitore non riesce ad arrestare
l'azionamento entro questo limite di tempo, K15 attiva la
funzione ELECTRICAL DISCONNECT entro il tempo stabilito da K16. Questa informazione viene trasferita al
convertitore attraverso un ingresso binario libero. L'ingresso deve essere collegato all'ingresso COAST_STOP
della logica dell'azionamento. L'ingresso COAST_STOP
riduce la corrente a zero il più rapidamente possibile. Il
tempo di ritardo di K16 deve essere leggermente superiore al tempo necessario perché il regolatore di corrente
azzeri la corrente. Al termine del tempo di K16, la tensione
di controllo viene disattivata e tutti i contattori di potenza si
aprono.
K16
ELEC.
DISCONN.
1
EMER.
STOP
S1
K15
2
K15
K16
CON-2
DIx X6:9
K15
-
Se non occorre tenere conto della velocità dell'azionamento, la funzione di K16 può essere inizializzata mediante il comando ELECTRICAL DISCONNECT.
d: Gestione del contattore principale tramite PLC solamente per ragioni di sicurezza
Questo modo non è consigliato come sequenza standard di ON /OFF. Tuttavia è talvolta usato per soddisfare regole di sicurezza o altre necessità. In
questi casi si consiglia di seguire le seguenti linee guida:
- Si suppone che il contatto del PLC sia in serie con K1 (al di sotto dei terminali X96: 1 e 2) o in serie con il contatto ausiliario di K16 oppure in sostituzione
di quest' ultimo
- L'apertura del contattore di potenza principale durante il funzionamento rigenerativo può causare il guasto di componenti (vedi Istruzioni per l'uso)
- Il PLC genera il comando "contattore principale off". Due tipi di contatto sono necessari:
- Un contatto di scatto dovrebbe allora essere collegato ad un ingresso digitale non utilizzato del convertitore; questo ingresso deve essere collegato al
segnale START_INHIBIT (908). Questo bloccherà i regolatori, forzando la corrente a zero e comandando l'apertura del contattore principale
(indipendentemente se il comando del convertitore sia usato o no).
- Un contatto normale può allora gestire il contattore principale.
- Possono essere rilevati allarmi o errori dovuti a fine sincronizzazione : questi possono essere resettati o baipassati (es. con la funzione di autorichiusura)
• Collegamento in sequenza
Quando viene impartito il comando ON al convertitore e non vi è alcun segnale di errore attivo, il convertitore chiude il ventilatore, il contattore principale
e di campo, verifica la tensione di alimentazione e lo stato dei contattori e, in assenza di messaggi di errore, attiva i regolatori e rimane in attesa del comando
RUN. Una volta impartito il comando RUN viene attivato il riferimento di velocità e si attiva il modo controllo velocità (per ulteriori dettagli si veda Descrizione
software).
II D 3-4
3ADW000066R0904 DCS500 System description i i
3.2
Configurazione di azionamento con campo interno e riduzione dei componenti esterni
Collegando l'azionamento in base a questo schema si ottengano le stesse prestazioni in termini di controllo ma con un grado ridotto di
flessibilità e funzioni di monitoraggio esterne ridotte al minimo da parte dell'azionamento. E' necessario adattare il software al cablaggio
esterno.
230V 50Hz
L1
400V 50Hz
MP
L1
L2
L3
F1
1
1
F8
2
OFF
2
2
X96:1
STOP
X96:2
START
ON
1
F5
F7
K21
K1
1
3
5
2
4
6
K1
K20
K20
K21
F6
K1
F3
L1
1
3
5
13
14
L3
I> I> I>
X96: 1
IN3
V5
OUT3
V6
IN1
V1
OUT1
V2
Scheda comunicazione (COM-x)
2
X99: 1
2
X2: 4
5
X2: 1
Scheda controllo (CON-2)
2
3
U1
AITAC
_ +
DO8
Alimentazione
potenza (POW-1)
AI2
_ +
AI1
_ +
5 6
AI3
_ +
+10V -10V
2
3
4
5
6
7
8
9
10 X4: 1
2
3
AO1 AO2 IACT
0V
4
5
6
DI1 DI2 DI3 DI4 DI5 DI6 DI7 DI8 +48V
0V
7
8
9
10
2
3
4
5
6
7
8
K1
9
10
7
2
4
6
Unitá eccitatrice
di campo
(SDCS-FEX-1/2)
0V
X7: 1
2
3
4
5
6
7
8
X5: 1...10
C1
D1
_
+
ad esempio
interruttore
pressione a
modulo C4
K20
in presenza di morsetti intermedi
DO1 DO2 DO3 DO4 DO5 DO6 DO7
0V
X6: 1
X1: 1
in base al tipo di unità è
possibile un'altra configurazione
Modulo
convertitore
AI4
_
+
0V
X3: 1
W1 PE
M
~
S4
X33
V1
X1: 5
+
3
_
K21
polarità indicate per funzionamento motore
T
M
+
U
V
W
M
3~
T
_
Figura 3.2/1:
Configurazione di azionamento con campo interno e riduzione dei componenti esterni
• Selezione dei componenti
si veda la figura 3.1/1
• Alimentazione di potenza
Vi sono vari componenti che richiedono alimentazione di potenza. Occorre tenere conto di alcune condizioni di partenza per il cablaggio:
- Sezione di potenza del convertitore:
da 200 V a 500 V, in base al tipo di convertitore; si veda il capitolo 2
- Alimentazione di potenza dell'elettronica del convertitore: utilizzare solo 230 V, selezionato da ponticello
- Ventilatore raffreddamento convertitore:
230 V monofase; si veda la sezione Dati tecnici
- Alimentazione di campo sezione di potenza:
da 200 V a 500 V; si veda il capitolo 2 e/o Dati tecnici
- Ventilatore raffreddamento motore:
selezione tensione motore alla tensione utilizzata per l'alimentazione di indotto
- Logica relè:
seleziona i componenti per 230 V!
Questa configurazione è praticamente identica a quella della figura 3.1/1. Si prega di verificare il dimensionamento di F1 per il carico aggiuntivo come campo e
ventilatore motore. Tutti i componenti vengono selezionati per 230 V o impostati a 230 V per poterli associare e alimentare con un'alimentazione di potenza ausiliaria.
I diversi utenti utilizzano fusibili separati.
• Controllo e sicurezza
Lo logica del relè può essere suddivisa in tre parti:
a: Generazione di comando ON/OFF e START/STOP: come alla figura 3.1/1
b: Generazione dei segnali di monitoraggio e controllo:
Il contattore di potenza principale K1 si gestisce come alla figura 3.1/1. L'alimentazione del ventilatore motore e campo sono riprese???? in
corrispondenza dell'uscita di K1. Pertanto i 3 utenti vengono controllati nello stesso modo.
Poiché il monitoraggio del ventilatore non è considerato, è necessario provvedere all'impostazione di questi parametri:
Collegamento (default) da:
cambiare in:
910 da 10701
a 10908
911 da 10703
a 10908
906 da 10709
a 12502
c: Modalità di arresto oltre a ON/OFF e START/STOP: Non considerata!
• Collegamento in sequenza
Quando viene impartito il comando ON al convertitore e non vi è alcun segnale di errore attivo, il convertitore chiude il ventilatore, il contattore principale
e di campo, verifica la tensione di alimentazione e lo stato dei contattori e, in assenza di messaggi di errore, attiva i regolatori e rimane in attesa del comando
RUN. Una volta impartito il comando RUN viene attivato il riferimento di velocità e si attiva il modo controllo velocità (per ulteriori dettagli si veda Descrizione
software).
II D 3-5
3ADW000066R0904 DCS500 System description i i
3.3
Configurazione di azionamento standard con campo esterno semicontrollato (monofase)
Collegando l'azionamento in base a questo schema si ottiene la massima flessibilità e il massimo livello di funzioni di monitoraggio standard
effettuate dall'azionamento. Non occorrono modifiche software per adattare l'azionamento al cablaggio esterno.
A
C
L1 N
L1
L2
L3
Livelli di tensione D
vedere descrizioneL1 N
E
L1
L2 L3
T2
230V
1
1
F7
F5
1
F9
1
F8
2
2
2
115V
2
K15
OFF
1
3
2
4
T3
500V
460V
415V
400V
F3
K10
K11
X96:2
START
X2:4
13
F6
14
K21
K1
F6
1
3
5
13
14
365V
350V
265V
250V
90V
60V
30V
X96:1
STOP
ON
F1
690V
660V
600V
575V
F2
525V
500V
450V
415V
400V
380V
I> I> I>
2
4
6
1
3
5
2
4
6
U
M
3~
X2:5
1
EMER.
STOP
K20
K8
S1
1
3
2
4
1
3
5
2
4
6
U1
V1
K1
1
3
2
4
K6
* K3
2
K20
K21
K6
K8
K3
K1
L1
K15
X96: 1
IN3
V5
OUT3
V6
IN1
V1
OUT1
V2
Scheda comunicazione (COM-x)
2
X99: 1
2
X2: 4
5
X2: 1
Scheda controllo (CON-2)
2
3
AITAC
_ +
AI1
Alimentazione
potenza (POW-1)
_
+
AI2
_
5 6
AI3
+ _ +
+10V -10V
0V
X3: 1
2
3
4
5
6
7
8
9
10 X4: 1
2
3
AO1 AO2 IACT
0V
4
5
6
DI1 DI2 DI3 DI4 DI5 DI6 DI7 DI8 +48V
0V
7
8
9
10
DO1 DO2 DO3 DO4 DO5 DO6 DO7
0V
0V
X6: 1
2
3
4
5
6
7
8
9
10
K6
1
2
3
4
5
6
7
8
X5: 1...10
1 2 3
C1
D1
_
1 2 3
C1
+
D1
_
K10
2
K1
Unitá eccitatrice
di campo
(DCF503A/504A) *
K20
S1
K8
V1
X2:
X16:
X7: 1
+
ad esempio
interruttore
pressione a
modulo C4
U1
in base al tipo di unità è
possibile un'altra configurazione
Modulo
convertitore
AI4
_
+
X3: 1 2
M
~
DO8
S4
X33
W1 PE
K21
K11
polarità indicate per funzionamento motore
in presenza di morsetti intermedi
T
+
M
V
W
T
_
Figura 3.3/1:
Configurazione di azionemento standard con campo esterno semicontrollato (monofase)
• Selezione dei componenti
Per questo schema elettrico è stato selezionato un convertitore DCS 500B con alimentazione di campo DCF 503A/4A. Se si usa un DCF 504A per
l'alimentazione di campo, è possibile l'inversione di campo. In tal caso, per azionamenti poco esigenti è sufficiente un DCS 501B (a due quadranti) per
alimentazione di indotto. Questa alimentazione di campo può essere utilizzata con tensioni di linea fino a 500 V e produce una corrente di campo fino a 50 A.
Per correnti di campo più elevate, utilizzare un'alimentazione trifase DCF 500B (schema riportato al punto 3.5/2).
• Alimentazione di potenza
Vi sono vari componenti che richiedono alimentazione di potenza:
- Sezione di potenza del convertitore:
da 200 V a 1000 V, in base al tipo di convertitore; si veda il capitolo 2
- Alimentazione di potenza dell'elettronica del convertitore: 115 V o 230 V, selezionato da ponticello
- Ventilatore raffreddamento convertitore:
230 V monofase; 400 V / 690 V trifase a A6/A7; si veda la sezione Dati tecnici
- Alimentazione di campo sezione di potenza:
115 V a 500 V; con un autotrasformatore isolante fino a 690 V; si veda il capitolo 2 e/o
Dati tecnici
- Alimentazione elettronica dell'unità di campo:
da 115 V a 230 V
- Ventilatore raffreddamento motore:
in base ai requisiti locali / del produttore del motore
- Logica relè:
in base ai requisiti locali
Questa configurazione è praticamente identica a quella mostrata alla figura 3.1/1. Oltre alla figura 3.1/1 l'unità di alimentazione di campo richiede
un'alimentazione di potenza elettronica, con fusibili separati e tratta dal livello a 230 V, generato da T2. Questo regolatore di campo è controllato mediante
un collegamento seriale, collegato a X16: in corrispondenza del convertitore di indotto. Con questo tipo di alimentazione di campo è possibile utilizzare la
variazione del rapporto del primario da 690 V!
Nel caso in cui la potenza per A, D e E sia alimentata dalla stessa sorgente utilizzata per C, occorre decidere se i fusibili F1 possano o meno essere utilizzati
per due finalità (protezione della sezione di potenza + alimentazione di potenza ausiliaria) o no. Occorre inoltre verificare che gli utenti possano essere
alimentati con questa forma d'onda di tensione (si veda il capitolo Induttanze di rete) prima del collegamento a C.
• Controllo
La logica del relè può essere suddivisa in tre parti come descritto alla figura 3.1/1. Essenzialmente per questa configurazione potrebbe essere utilizzata la
logica mostrata alla figura 3.2/1 . Le dimensioni dell'azionamento e/o il suo valore possono essere un criterio di selezione della logica in base alla figura 3.1/
1 o 3.2/1 o a una combinazione di entrambe.
* Raccomandazione: Se si utilizza l'alimentazione di campo di DCF 504A, mantenere sotto controllo K3 come illustrato!
• Collegamenti in sequenza
Lo stesso della figura 3.1/1
II D 3-6
3ADW000066R0904 DCS500 System description i i
3.4 Configurazioni standard utilizzando un campo (trifase) completamente controllato senza convertitore di indotto
Il convertitore DCS 500B è utilizzato come una versione DCF 500B in applicazion diverse dal motore. Se l'azionamento viene collegato
in base a questo esempio o a quello mostrato alla figura 3.2/1 dipende dall'applicazione e dai suoi requisiti. La struttura software dovrà
essere adattata come descritto nel Manuale operativo.
Livelli di tensione
C
A
L1
L1 N
L2
vedere
L3
descrizione
T2
230V
1
1
F7
1
F5
F8
2
2
115V
2
K15
OFF
F1.2
690V
660V
600V
575V
F2
525V
500V
450V
415V
400V
380V
1
3
2
4
X96:1
STOP
K10
X96:2
START
ON
X2:4
K21
K1
X2:5
1
EMER.
STOP
K20
K8
S1
1
3
2
4
1
3
5
2
4
6
U1
V1
K1
2
K20
K21
K8
K1
K15
L1
X96: 1
IN3
V5
OUT3
V6
IN1
V1
OUT1
V2
Scheda comunicazione (COM-x)
2
X99: 1
AITAC
_ +
2
3
4
AI1
_ +
5
5
X2: 1
AI2
_ +
5 6
AI3
_ +
6
7
8
9
2
3
DCF 506
in base al tipo di unità è
possibile un'altra configurazione
Modulo
convertitore
AI4
_
+
+10V -10V
10 X4: 1
2
3
AO1 AO2 IACT
0V
4
5
6
DI1 DI2 DI3 DI4 DI5 DI6 DI7 DI8 +48V
0V
7
8
9
10
X6: 1
2
3
4
5
6
7
8
9
K1
1
X4:1
0V
10
X7: 1
2
3
4
5
6
7
8
X4:2
X5: 1...10
C1
D1
_
X11
+
X12
_
K20
S1
K10
2
K8
Protezione da
sovratensioni
DO1 DO2 DO3 DO4 DO5 DO6 DO7
0V
+
Figura 3.4/1:
W1 PE
M
~
Alimentazione
potenza (POW-1)
0V
X3: 1
X2: 4
DO8
S4
X33
2
Scheda controllo (CON-2)
K21
Configurazione standard utilizzando un campo (trifase) completamente controllato senza convertitore di indotto
• Selezione dei componenti
Per questo schema elettrico è stato selezionato un modello di convertitore DCF 500B C1 o C2 con un'unità DCF 506, che funge da protezione da
sovratensioni.
• Alimentazione di potenza
Vi sono vari componenti che richiedono alimentazione di potenza:
- Sezione di potenza del convertitore:
da 200 V a 500 V, in base al tipo di convertitore; si veda il capitolo 2
- Alimentazione di potenza dell'elettronica del convertitore: 115 V o 230 V, selezionato da ponticello
- Ventilatore raffreddamento convertitore:
230 V monofase a A5 (indotto), C1 + C2 (campo); 400 V / 690 V trifase a C4 (indotto);
si veda la sezione Dati tecnici
- Logica relè:
in base ai requisiti locali
Essenzialmente come nella figura 3.1/1. Se il convertitore è alimentato direttamente da un trasformatore ad alta tensione in corrispondenza del punto C,
verificare che l'interruttore dell'alta tensione non venga aperto in presenza di flusso di corrente di campo. Nella configurazione dell'azionamento occorre
tenere conto di altre condizioni (ulteriori dettagli saranno forniti su richiesta).
• Controllo
Lo logica del relè può essere suddivisa in tre parti:
a: Generazione di comando ON/OFF e START/STOP: come alla figura 3.1/1
b: Generazione dei segnali di monitoraggio e controllo:
Essenzialmente identica alla figura 3.1/1.
Anziché il monitoraggio del ventilatore del motore in corrispondenza dell'ingresso binario 2, che qui non esiste ma potrebbe esistere come dispositivo di raffreddamento per l'induttanza, la protezione da sovratensione DCF 506 è monitorata dallo stesso ingresso. Se occorresse monitorare un
qualsiasi tipo di dispositivo di raffreddamento supplementare potrebbero essere utilizzati blocchi funzione supplementari.
c: Modalità di arresto oltre a ON/OFF e START/STOP:
Essenzialmente identica alla figura 3.1/1
In questo caso potrebbe essere molto più opportuno prevedere una riduzione della corrente. In tal caso, selezionare coasting (arresto per inerzia) al
parametro EMESTOP_MODE.
• Collegamento in sequenza
come nella figura 3.1/1
II D 3-7
3ADW000066R0904 DCS500 System description i i
3.5
Configurazione tipica per azionamenti ad alta potenza
Questo schema elettrico è stato prodotto per mostrare la configurazione di azionamenti di grandi dimensioni, preferibilmente superiori a
2000 A con alimentazione di indotto e alimentazione di campo trifase. Per questo tipo di azionamenti è stato utilizzato il modello di
convertitore A6 o A7. La configurazione di base è identica alla figura 3.1/1.
A
B
L1 N
L1
C
L2 L3
L1
L2
L3
Livelli di tensione
vedere descrizione
E
L1
L2 L3
T2
230V
1
1
F7
F5
115V
2
2
K15
OFF
690V
660V
600V
575V
F2
525V
500V
450V
415V
400V
380V
1
3
2
4
F8
1
5
F6
13
1
3
5
14
X96:1
STOP
3
14
I> I> I>
K10
2
4
6
1
3
5
2
4
6
13
I> I> I>
2
4
6
1
3
5
2
4
6
U
M
3~
X96:2
START
ON
13
F6
14
K21
K1
1
X2:TK
2
X2:TK
3
1
EMER.
STOP
K20
K8
S1
1
3
5
2
4
6
U1
V1
K6
K1
2
K20
K21
K6
K8
K1
L1
K15
X96: 1
IN3
V5
OUT3
V6
IN1
V1
OUT1
V2
Scheda comunicazione (COM-x)
2
X99: 1
AITAC
_ +
AI1
_ +
AI2
_ +
Alimentazione
potenza (POW-1)
5 6
AI3
_ +
2
3
4
5
6
7
8
9
W1 PE
M
~
DO8
in base al tipo di unità è
possibile un'altra configurazione
Modulo
convertitore
AI4
_
+
+10V -10V
0V
X3: 1
X2: U1 V1 W1 PE
X2: TK TK
F1
S4
X33
2
Scheda controllo (CON-2)
10 X4: 1
2
3
AO1 AO2 IACT
0V
4
5
6
DI1 DI2 DI3 DI4 DI5 DI6 DI7 DI8 +48V
0V
7
8
9
10
DO1 DO2 DO3 DO4 DO5 DO6 DO7
0V
0V
X6: 1
2
3
4
5
6
7
8
9
10
X16:
X7: 1
2
3
4
5
6
7
8
X5: 1...10
1 2 3
C1
D1
_
+
K6
ad esempio
interruttore
pressione a
modulo C4
K20
S1
K10
2
K8
in presenza di morsetti intermedi
1
K1
K21
polarità indicate per funzionamento motore
T
M
+
V
W
_
Figura 3.5/1:
1
2
3
X16:
T
Configurazione tipica per azionamenti ad alta potenza (unità di indotto DCS 500B)
• Selezione dei componenti
Per questo schema elettrico è stato selezionato un modello di convertitore DCS 500B A6 o A7 con alimentazione di campo trifase. Questa alimentazione
di campo può essere utilizzata con tensioni di linea fino a 500 V e produce una corrente di campo fino a 540 A.
• Alimentazione di potenza
Vi sono vari componenti che richiedono alimentazione di potenza:
- Sezione di potenza del convertitore di indotto:
da 200 V a 1000 V, in base al tipo di convertitore; si veda il capitolo 2
- Sezione di potenza del convertitore di campo:
da 200 V a 500 V
- Alimentazione di potenza dell'elettronica del convertitore: 115 V o 230 V, selezionato da ponticello
- Ventilatore raffreddamento convertitore:
230 V monofase a C1 + C2 (campo); 400 V / 690 V trifase a A6/A7 (indotto); si veda la
sezione Dati tecnici
- Ventilatore raffreddamento motore:
in base ai requisiti locali / del produttore del motore
- Logica relè:
in base ai requisiti locali
Questa configurazione è praticamente identica a quella mostrata alla figura 3.1/1. I convertitori in uso in questo caso sono molto più grandi di prima. Sono
dotati di fusibili in corrispondenza dei bracci della sezione di potenza. Ecco perché F1 si trova nel riquadro della sezione di potenza. L'eventuale necessità
di altri fusibili tra il trasformatore di alimentazione dovrà essere determinata caso per caso. Il trasformatore di alimentazione di potenza T3 non può essere
utilizzato per questa configurazione! Si veda anche l'alimentazione di potenza alla fig. 3.4/1 (campo interamente controllato).
Nel caso in cui la potenza per A, B, D e E sia alimentata dalla stessa sorgente utilizzata per C, occorrerà decidere se il fusibile F1 possa essere utilizzato
per due finalità (protezione della sezione di potenza + alimentazione di potenza ausiliaria). Occorre inoltre verificare se gli utenti possano essere alimentati
con questa forma d'onda della tensione (si veda il capitolo Induttanze di linea) prima del collegamento a C.
II D 3-8
3ADW000066R0904 DCS500 System description i i
Livelli di tensione
vedere descrizione
C
L1
L2
L3
F1.2
1
1
1
F5.2
F8.2
2
2
2
X96:1
K10.2
X96:2
X2:4
X2:5
K8.2
K8.2
1
3
2
4
1
3
5
2
4
6
U1
V1
K1.2
L1.2
K1.2
3
IN3
V5
OUT3
V6
IN1
V1
OUT1
V2
X96: 1
Scheda comunicazione (COM-x)
2
X99: 1
2
X2: 4
5
X2: 1
2
3
M
~
DO8
Alimentazione
potenza (POW-1)
DCF 506
in base al tipo di unità è
possibile un'altra configurazione
Modulo
convertitore
S4
X33
AITAC
_ +
AI1
_ +
AI2
_ +
5 6
AI3
_ +
AI4
_
+
+10V -10V
0V
X3: 1
2
3
4
5
6
7
8
9
W1 PE
Scheda controllo (CON-2)
10 X4: 1
2
3
AO1 AO2 IACT
0V
4
5
6
DI1 DI2 DI3 DI4 DI5 DI6 DI7 DI8 +48V
0V
7
8
9
10
2
3
4
5
6
7
8
9
X4:1
DO1 DO2 DO3 DO4 DO5 DO6 DO7
0V
0V
X6: 1
Protezione da
sovratensioni
10
X7: 1
2
3
4
5
6
7
8
X4:2
X16:
X5: 1...10
1 2 3
C1
+
D1
_
X11
+
X12
_
K1.2
K10.2
K8.2
X16:
1
2
3
Figura 3.5/2:
Configurazione tipica per azionamenti ad alta potenza (unità di campo DCF 500B)
• Controllo
La logica relè può essere suddivisa in tre parti. Essenzialmente per questa configurazione potrebbe essere usata la logica mostrata alla figura 3.2/1. Per
azionamenti di queste dimensioni e valore si consiglia la logica indicata:
a: Generazione del comando ON/OFF e START/STOP:
come nella figura 3.1/1
b: Generazione dei segnali di monitoraggio e controllo:
come nella figura 3.1/1
Ciascun convertitore effettua autonomamente il monitoraggio del contattore principale e dell'alimentazione del ventilatore.
c: Modalità arresto oltre a ON/OFF e START/STOP:
le stesse della figura 3.1/1
Si consiglia l'uso di dispositivi di sicurezza supplementari connessi all'uso della funzione ELECTRICAL DISCONNECT in questo tipo di azionamenti.
• Collegamento in sequenza
E' essenzialmente lo stesso di quello descritto alla figura 3.1/1. L'eccitatrice di campo trifase è dotata di funzionalità di servizio molto più precise rispetto ai
tipi monofase (SDCS-FEX-2A o DCF 503A/4A). Tuttavia, in termini di controllo (segnali binari comunicati al convertitore di indotto) si comporta esattamente
nello stesso modo!
Quando si impartisce un comando ON al convertitore di indotto e non vi è alcun segnale di errore attivo, il convertitore trasferisce il comando attraverso il
collegamento seriale al convertitore di campo. In seguito ciascun convertitore chiude il ventilatore e il contattore principale, verifica la tensione di
alimentazione e lo stato dei contattori e, in assenza di messaggi di errore, attiva il regolatori. Seguono le stesse azioni descritte alla figura 3.1/1.
Se l'unità di campo registra un errore, un segnale di errore comune viene inviato al convertitore di indotto. In parallelo viene visualizzata un'indicazione di
errore sul display a 7 segmenti dell'unità di campo e in corrispondenza dell'uscita binaria, qualora sia programmata. Il convertitore di indotto indicherà la
presenza di un messaggio di errore nell'unità di campo con F39 sul display. Se in questo momento l'azionamento è in funzione, viene disattivato
automaticamente. Successivamente il sistema di controllo comunica un comando di reset al convertitore di indotto, dopo aver annullato i comandi ON/OFF
(Acceso/spento) e RUN (Marcia). Il messaggio di errore a questo punto non dovrebbe più comparire. Con un nuovo comando di avvio il convertitore di indotto
invia dapprima un comando di reset al convertitore di campo. L'unità di campo a questo punto resetta il messaggio di errore, purché la causa che l'ha scatenato
sia stata rimossa. In seguito l'unità di campo riceve il comando di avvio dal convertitore di indotto e attiva il contattore principale.
Non è necessario lo scambio di informazioni (ad esempio comandi, valori effettivi o messaggi di errore) tra convertitore di campo e sistema di controllo
mediante collegamento seriale come ad esempio PROFIBUS. Se si decide di utilizzare le capacità di servizio maggiori offerte dalle unità di campo trifase,
è possibile comunicare mediante hardware (morsettiera) o con collegamento seriale.
II D 3-9
3ADW000066R0904 DCS500 System description i i
3.6
Configurazione tipica per azionamenti ad alta potenza collegati in parallelo in applicazioni Master-Follower a 12 impulsi
Questo schema elettrico può essere utilizzato per sistemi in parallelo a 12 impulsi. Si basa sulla configurazione mostrata alla figura 3.1/1.
Questa configurazione può essere realizzata con convertitori da 25 A o con due unità 5200 A. Spesso questa configurazione viene
selezionata per ragioni di potenza complessiva. Per questa ragione il cablaggio è già adattato a convertitori di tipo A5 (collegamento
ventilatore monofase) o A7 . Per l'alimentazione di campo, utilizzare la parte di schema che mostra il cablaggio di campo nella figura 3.5/
2. Se si utilizza un modello più piccolo, prendere la parte che interessa in una delle figure precedenti.
A
B
L1 N
L1
Livelli di tensione
descrizione
C
L2 L3
L1
L2
E
L3 vedere
L1
L2 L3
T2
230V
1
1
F7
F5
115V
2
2
K15
OFF
690V
660V
600V
575V
F2
525V
500V
450V
415V
400V
380V
1
3
2
4
F8
1
5
F6
13
1
3
5
14
X96:1
STOP
3
14
I> I> I>
2
4
6
1
3
5
2
4
6
K10
13
I> I> I>
2
4
6
1
3
5
2
4
6
U
M
3~
X96:2
START
ON
1
X2:TK
13
F6
14
K21
K1
2
X2:TK
3
1
EMER.
STOP
K20
K8
S1
1
3
5
2
4
6
U1
V1
K6
K1
2
K20
K21
K6
K8
K1
K15
X96: 1
IN3
V5
OUT3 V6
IN1
Scheda comunicazione (COM-x)
2
X99: 1
DO8
Alimentazione
potenza (POW-1)
S4
AI1
_ +
AI2
_ +
5 6
AI3
_ +
+10V -10V
2
3
4
5
6
7
8
9
10 X4: 1
2
3
AO1 AO2 IACT
0V
4
5
6
DI1 DI2 DI3 DI4 DI5 DI6 DI7 DI8 +48V
0V
7
8
9
X6: 1
2
3
K6
ad esempio
interruttore
pressione a
modulo C4
4
5
6
1
7
8
0V
X16:
X7: 1
2
3
4
5
6
7
8
X5: 1...10
1 2 3
+
C1
_
D1
K10
2
K1
10
K20
S1
K8
9
Modulo
convertitore
DO1 DO2 DO3 DO4 DO5 DO6 DO7
0V
10
W1 PE
in base al tipo di unità è
possibile un'altra configurazione
X18:
AI4
_
+
0V
X3: 1
X2: U1 V1 W1 PE
F1
V1
AITAC
_ +
X2: TK TK
M
~
OUT1 V2
X33
2
Scheda controllo (CON-2)
K21
polarità indicate per funzionamento motore
T
M
+
T
1
2
3
X16:
in presenza
di morsetti
intermedi
V
W
al convertitiore di campo
DCF 500B X16:
_
Figura 3.6/1:
Configurazione tipica per azionamenti ad alta potenza collegati in parallelo a 12 impulsi (MASTER)
• Selezione dei componenti
Si vedano le considerazioni sopra riportate.
• Alimentazione di potenza
Vi sono vari componenti che richiedono alimentazione di potenza:
- Sezione di potenza del convertitore di indotto:
da 200 V a 1000 V, in base al tipo di convertitore; si veda il capitolo 2
- Alimentazione di potenza dell'elettronica del convertitore: 115 V o 230 V, selezionato da ponticello
- Ventilatore raffreddamento convertitore:
230 V monofase a C1 + C2; 400 V / 690 V trifase a A6/A7; si veda la sezione Dati tecnici
- Alimentazione di campo sezione di potenza:
si veda 3.5/2
- Ventilatore raffreddamento motore:
in base ai requisiti locali / del produttore del motore
- Logica relè:
in base ai requisiti locali
Questa configurazione è essenzialmente identica a quella mostrata alla figura 3.5/1. Il sistema di azionamento è alimentato da un trasformatore a 12 impulsi
dotato di due avvolgimenti del secondario con uno spostamento di fase di 30 gradi. In questo caso occorre determinare le modalità di generazione dei livelli
di tensioni ausiliaria A, B, C, D=campo e E.
Occorre prestare attenzione alla tensione ausiliaria A:
- la potenza del trasformatore T2 è sufficiente ad alimentare tutti gli utenti? Gli utenti sono i dispositivi elettronici di tutti i convertitori,possibilmente i
ventilatori dei due convertitori a 12 impulsi e l'unità di alimentazione di campo, i contattori principali, i circuiti di monitoraggio, ecc.
- è necessaria una ridondanza e/o flessibilità per il funzionamento di master e follower in modo indipendente l'uno dall'altro?
Se necessario è opportuno prevedere diversi livelli di tensione ausiliaria (A, A', A", ecc.).
In seguito si dovrà decidere come i diversi utilizzatori saranno protetti da qualsiasi tipo di guasto. Se si utilizzano interruttori, tenere conto della loro capacità
di interruzione. I suggerimenti sopra riportati costituiscono un'indicazione di massima.Si veda anche l'alimentazione di potenza alla fig. 3.4/1 (campo
interamente controllato).
II D 3-10
3ADW000066R0904 DCS500 System description i i
∆
∆
Y
Livelli di tensione
vedere descrizione
C
L1
L2
L3
B
L1 L2 L3
1
1
F5.3
2
F8.3
1
3
5
13
14
2
X96:1
I> I> I>
K10.3
2
4
6
1
3
5
2
4
6
X96:2
X2:TK
X2:TK
1
3
5
2
4
6
K8.3
K1.3
K8.3
K1.3
3
U1
V1
X96: 1
W1 PE
F1
2
X99: 1
2
X2: TK TK
X2: U1 V1 W1 PE
Scheda controllo (CON-2)
AITAC
_ +
X18:
_
D1
Alimentazione
potenza (POW-1)
S4
Modulo
convertitore
AI1
_ +
AI2
_ +
5 6
AI3
_ +
AI4
_
+
+10V -10V
0V
+
C1
X3: 1
2
3
4
5
6
7
8
9
10 X4: 1
2
3
AO1 AO2 IACT
0V
4
5
6
in base al tipo di unità è
possibile un'altra configurazione
DI1 DI2 DI3 DI4 DI5 DI6 DI7 DI8 +48V
0V
7
8
9
Scheda comunicazione (COM-x)
M
~
DO8
10
2
3
4
5
6
7
8
9
10
IN3
V6
OUT3
V1
IN1
V2
OUT1
X33
DO1 DO2 DO3 DO4 DO5 DO6 DO7
0V
0V
X6: 1
V5
X16:
X7: 1
2
3
4
5
6
7
8
X5: 1...10
1 2
K20
Interruttore
pressione
K10.3
K8.3
Figura 3.6/2:
K1.3
Configurazione tipica per azionamenti ad alta potenza collegati in parallelo a 12 impulsi (FOLLOWER)
• Controllo
La logica relè può essere divisa in tre parti. Essenzialmente per questa configurazione potrebbe essere usata la logica mostrata alla figura 3.2/1. Per
azionamenti di queste dimensioni e valore si consiglia la logica indicata:
a: Generazione del comando ON/OFF e START/STOP:
come nella figura 3.1/1
b: Generazione di segnali di monitoraggio e controllo:
come nella figura 3.1/1
Ciascun convertitore effettua il monitoraggio del proprio contattore e della alimentazione del ventilatore.
c: Modalità di arresto oltre a ON/OFF e START/STOP: lcome nella figura 3.1/1
Si consiglia l'uso di dispositivi di sicurezza supplementari connessi all'uso della funzione ELECTRICAL DISCONNECT in questo tipo di azionamenti.
• Definizione delle sequenze
Lo schema elettrico si basa su una modalità permanente a 12 impulsi senza adattamento relativa alla ridondanza e su un convertitore che funge da master
e si occupa del controllo di campo. Tutte le note al capitolo 3.5 sono applicabili anche a questa configurazione. I convertitori si scambiano segnali binari per
quanto riguarda l'inversione del ponte e il monitoraggio rapido mediante un semplice collegamento via cavo piatto X18:. I segnali analogici come il riferimento
di corrente e la corrente effettiva, vengono scambiati mediante la morsettiera X3: / X4:. I parametri del gruppo 36 devono essere inviati nell'ambito del
convertitore Master e Slave per consentire lo scambio di dati attraverso il collegamento via cavo X18: e gli ingressi / uscite operativi. I parametri che devono
essere impostati nei gruppi 1 e 2 (Master e Slave) assicurano lo scambio di dati dei valori effettivi relativi a uscite e ingressi analogici. Altre informazioni ed
elenchi parametri dettagliati si trovano all'interno del manuale di pianificazione e avviamento per convertitori di potenza a 12 impulsi.
• Suggerimento di ingegnerizzazione
Se il sistema di azionamento deve essere operativo in caso di guasti, è necessario e possibile provvedere a una ridonanza! Di fatto tutti i componenti possono
essere soggetti a guasti o errori, e la gravità delle conseguenze dipenderà dal componente in questione. Per questa ragione devono essere specificati
preventivamente gli errori e i guasti che dovranno far scattare una modalità di ridondanza. Gli errori e i guasti che determinano interruzioni gravi sono quelli
che riguardano l'alimentatore di potenza (trasformatore a 12 impulsi, i due convertitori che alimentano l'indotto, l'unità di alimentazione di campo e la reattanza
interfase a 12 impulsi o il motore. E' necessario adottare le necessarie precauzioni per aumentare l'operatività dell'azionamento qualora le condizioni del
carico e la situazione del motore consentano di utilizzare il sistema a potenza ridotta. Ciò può avvenire, ad esempio, utilizzando due trasformatori anziché
un unico trasformatore a 12 impulsi, consentendo ai convertitori di operare in modalità a 6 impulsi (solo un convertitore è acceso, l'altro rimane spento);
installando una seconda unità di alimentazione di campo in caso di guasti hardware; oppure abilitando il controllo di campo da un solo convertitore, con la
possibilità di bypassare la reattanza interfase a 12 impulsi.
II D 3-11
3ADW000066R0904 DCS500 System description i i
II D 3-12
3ADW000066R0904 DCS500 System description i i
4 Descrizione del software (Versione 21.2xx)
4.1 Programma di progettazione GAD
Lo schema standard della struttura software del DCS500
è fornita in un fascicolo all'interno del presente capitolo.
Oltre a tutti i blocchi funzione evidenziati (denominati
"Blocchi funzione standard") sono disponibile altri
blocchi (denominati "Blocchi applicativi") come ABS
(Valore assoluto), ADD (Unità aggiuntiva a 2 e 4
ingressi), AND (Gate a 2 e 4 ingressi), COMP (Comparatore), CONV (Blocchi di conversione), COUNT
(Contatore), DIV (Divisore), FILT (Filtro), FUNG
(generatore di funzione x-y), LIM (Limitatore), MUL
(Moltiplicatore), OR (gate a 2 e 4 ingressi), PAR
(Blocchi funzione parametro), regolatore PI, memoria
SR, SUB (Sottrazione), XOR (gate e altri).
Entrambi i tipi sono memorizzati nel convertitore e in
dotazione con ciascun modulo. I blocchi funzionali
applicativi e i blocchi funzionali standard sono disponibili come libreria in formato di file. Questa libreria
funge da base per qualsiasi modifica personalizzata.
Poiché le librerie costituiscono sempre una copia di
quella disponibile all'interno del convertitore, l'ultima
libreria comprende sempre quelle precedenti.
I tool di messa in servizio e manutenzione per DCS500
(Tool pannello o DDC/CMT) consentono di collegare
o scollegare blocchi funzione e pertanto danno la
possibilità di realizzare applicativi software personalizzati. Entrambi questi tool tuttavia non sono in grado di
Blocco funzioni standard
elaborare una documentazione delle variazioni software, se non in formato di tabella. Pertanto ABB offre un
altro tool specifico destinato a sviluppare strutture e
schemi software più estesi e a fornire un file di dati con
queste informazioni per poterle trasferire nella sezione
di controllo dell'azionamento con il tool CMT.
Questo tool è denominato GAD (Graphical Application Designer, Designer applicativo grafico).
Il GAD deve essere utilizzato offline e richiede un tool
CMT per il trasferimento della struttura software modificata all'azionamento.
Il programma GAD comprende le seguenti funzionalità:
• Design applicativo e programmazione
• Editor grafico per realizzare e modificare schemi di
programmi
• Descrizione documenti controllata dall'utente
• Compilazione del file di richiesta da scaricare nel
convertitore mediante il tool CMT
• Compilazione del file di diagramma da scaricare
nella finestra del tool CMT per visualizzare ondine
i valori effettivi
Requisiti di sistema/raccomandazioni:
• min. PC 486, 4 MB di RAM, spazio libero su disco
rigido 40 MB
• sistema operativo: Windows 3.x, 95, 98, NT, 2000
o XP
Blocco funzioni di un'applicazione
Fig. 4.1/1 Blocchi funzione standard e delle applicazioni utilizzati con il programma GAD
Nota:
Per ulteriori informazioni sul programma GAD e la libreria, sono disponibili manuali dove vengono descritte le possibilità e le modalità di
gestione del programma.
II D 4-1
3ADW000066R0904 DCS500 System description i i
4.2 Introduzione alla struttura e alla gestione
Il software del DCS 500 è costituito da blocchi funzione collegati. Ciascuno di questi blocchi funzione costituisce una sottofunzione delle funzionalità globali. I
blocchi funzione possono essere suddivisi in due categorie:
• Blocchi funzione attivi in maniera permanente, che
sono utilizzati quasi sempre; questo tipo di blocchi
è descritto nelle pagine che seguono.
• Blocchi funzione che, benché disponibili come funzioni standard nel software, devono essere espressamente attivati e vengono utilizzati per far fronte a
requisiti speciali. Questi includono, a titolo esemplificativo:
gate AND a 2 o 4 ingressi,
gate OR a 2 o 4 ingressi,
sommatori a 2 o 4 ingressi,
moltiplicatori/divisori, ecc.
oppure funzioni ad anello di controllo chiuso quali
integratore,
regolatore PI,
elemento D-T1, ecc.
Tutti i blocchi funzione presentano dei puntatori quali
identificatori dei segnali di ingresso e uscita. Questi
puntatori possono a loro volta essere suddivisi in due
categorie:
Per modificare i collegamenti fra i blocchi funzione,
procedere come segue:
• selezionare prima l'ingresso
• e quindi collegarsi all'uscita
Tutti i collegamenti che presentano un puntatore all’inizio o alla fine possono essere modificati.
Parametri per l'impostazione di valori
(quali tempi di salita/discesa, guadagno regolatore,
valori di riferimento, ecc.)
GENERATORE RAMPA
P2
Valore
P4
Valore
P6
Valore
Impostazione di
default
1708
1709
1710
Parametro
Per la selezione parametro/ ingresso considerare quanto
segue:
• Ignorare le due cifre a destra; il gruppo è costituito
dalle restanti cifre da selezionare
• Le due cifre a destra sono l'elemento e devono essere
selezionate
DI7
Ingressi per designazione di collegamenti
DI7
10713
uscita
901
LOGICA AZIONAMENTO
ingresso
10713
Gruppo 107
elemento13
La selezione può essere effettuata mediante il pannello
di controllo CDP312, utilizzando i tasi a doppia freccia
per il gruppo e ii tasti a singola freccia per l'elemento o
un programma tool PC CMT/DCS500B.
Le pagine che seguono corrispondono a quelle che si
possono stampare con il tool GAD avvalendosi di
ulteriori suggerimenti basati sul software 21.233,
identico al software 21.234.
Nota:
Le pagine che seguono descrivono la funzionalità cablate del prodotto, così come viene consegnato. Se sembrano
mancare un determinato segnale e/o una particolare funzione che si rendono necessari, spesso li si possono realizzare
in maniera molto semplice:
• Il segnale richiesto esiste già ma - a causa della sua
complessità - non è semplice da descrivere. Per
questo motivo compare nel listato dei segnali, nella
descrizione del software.
• In alternativa, il segnale richiesto può essere generato
con i segnali disponibili e blocchi funzione aggiuntivi.
• Inoltre, si osservi che le funzionalità descritte nelle
pagine che seguono sono disponibili come funzioni
ridondanti per la serie di parametri Motore 2. Nella
memoria dell'azionamento sono disponibili due serie di parametri (gruppi da 1 a 24). Per ulteriori
informazioni fare riferimento al pieghevole.
• I valori dei parametri sono visualizzati in formato
GADTool
II D 4-2
3ADW000066R0904 DCS500 System description i i
Morsetto
SDCS-CON-2
SP -20
SP -90
Riferimento
velocitá
6 5
X3:
P1
1
P2
20000
AI1
10104
AI1:OUT+
10105
AI1:OUT10106
AI1:ERR
104 AI1 CONV MODE
105 AI1 HIGH VALUE
P3
-20000
106 AI1 LOW VALUE
+
--
REF SEL
1910 IN1
1911 SEL1
DI8 (10715)
OUT
11903
1912 IN2
1913 SEL2
1914 IN3
1915 SEL3 0
1916 ADD
1917 REV
ST5
ST5
SP -77
CONST REF
1901 ACT1
1902 ACT2
1
1903 ACT3
ACT 11902
DRIVE LOGIC (903)
1904 ACT4
P2
1500
P3
0
P4
1906 REF1
1907 REF2
Scelta riferimento
di velocitá
OUT 11901
1908 REF3
1909 REF4
0
P5
0
P1
1000
1905 DEF
ST5
SP -15 SOFTPOT1
SOFTPOT
1918 INCR
OUT 11904
1919 DECR
ACT 11905
1920 FOLLOW
1923 ENABLE
DRIVE LOGIC (10903)
P1
5000
P2
-5000
1921 OHL
1922 OLL
(10903)
RUNNING
T20
SP -11
Encoder incrementale
SPEED MEASUREMENT
X5:
10
CH A
1
Tachimetrica
Tacho
4 3
X3:
SP -84
15000
P2
2048
AITAC
10101
AITAC:OUT+
10102
AITAC:OUT10103
AITAC:ERR
+
2 1
-8...-30V
-30...-90V
-90...-270V
P1
P1
0
P2
30000
P3
-30000
101
102
103
2103
2101
SPEED SCALING
PULSE
TACHO
0
1
2
3
4
TACHOPULS NR
AITAC:OUT+
(10505)
(501)
12104
TACHO PULSES
CH B
EMF
TO
SPEED
CALC
U ARM ACT
U MOTN V
12102
SPEED ACT
T
DATA LOGGER
(601)
5
AITAC CONV MODE
AITAC HIGH VALUE
P3
5
AITAC LOW VALUE
ST5
P4
0
P5
500
2102
2104
2105
SPEED MEAS MODE
SPEED ACT FTR
SPEED ACT FILT
SPEED ACT FLT FTR
12103
T
SPEED ACT EMF
MAINTENANCE
(1210)
12101
T5
Calcolo retroazione di velocitá
SP -89
Riferimento
di coppia
8 7
X3:
AI2
AI2:OUT+ 10107
AI2:OUT- 10108
+
--
AI2:ERR 10109
P1
0
P2
2000
P3
-2000
107
AI2 CONV MODE
AI3
X3:
10 9
+
-0
P2
2000
-2000
110
111
112
AI3 CONV MODE
AI3 HIGH VALUE
AI3 LOW VALUE
ST5
2 1
X4:
+
--
AI4:ERR
2000
P3
AI4:OUT+
AI4:OUT-
P2
-2000
0
P4
0
P5
0
P7
500
P8
10
P9
30
P10
30
P11
0
P13
500
P14
2
501
502
503
504
113
114
115
AI4 CONV MODE
10113
P12
0
10114
P16
4
10115
P17
1024
P18
0
P6
10
AI4 HIGH VALUE
AI4 LOW VALUE
ST5
Motor Data
U MOTN V
Dati di linea
I MOTN A
I MOT1 FIELDN A
I MOT2 FIELDN A
505 FEXC SEL
507
506
Supply Data
U SUPPLY
U NET ACT
U NET DC NOM V
PHASE SEQ CW
LINE FREQUENCY
Control Adjust.
AI4
0
0
P3
SP -87
Non utilizzato
P1
0
P2
AI3:OUT+ 10110
AI3:OUT- 10111
AI3:ERR 10112
P1
P1
SP -88
Non utilizzato
SETTGS_3
SETTINGS
Conv. settings C4
Conv. values
10510
517
SET I COMV A
I TRIP A
518
10509
SET U CONV V
I CONV A
519
10511
SET MAX BR TEMP
U CONV V
10512
520
SET CONV TYPE
MAX BR TEMP
521
10513
SET QUADR TYPE
CONV TYPE
10514
QUADR TYPE
10507
BRIDGE TEMP
SP -1
108 AI2 HIGH VALUE
109
AI2 LOW VALUE
ST5
P3
12PULSE LOGIC (3604)
523 CURR ACT FILT TC
524
PLL CONTROL
528 PLL DEV LIM
UDC
526 OFFSET UDC
513
EMF FILT TC
+
- CALC
Iact
CONV CUR ACT
ARM CUR ACT
TORQUE ACT
10504
DATA LOGGER (604)
10508
10515
10501
10502
DATA LOGGER (602)
MAINTENANCE (1211)
10503
II D 4-3
U ARM ACT 10505
EMF ACT 10506
525
3ADW000066R0904
DCS500
System
description
ii
UNI FILT
TC
P19
10
(only for Cur. Controlling)
P15
0
522
LANGUAGE
ST20
1/8
DATA LOGGER (603)
MAINTENANCE (1212)
3ADW000066R0904 DCS500 System description i i
2/8
RAMP_3
SP -18
1720 SPEED SET
1701 IN
(11803)
P10
RAMP GENERATOR
LOC REF
(10906)
LOCAL
0
1702 RES IN
1717
STARTSEL
0
1703 HOLD
P1
200
P2
200
P3
100
P4
200
P5
100
P6
0
P7
0
P8
20000
P9
-20000
1711
1709
1712
1710
OUT 11701
S
0
2021
2005
0
P1
SP -17
REFSUM_2
IN1
OUT 11802
1802 IN2
2003
1801
2004
0
P2
FREE SIGNALS
(12517)
H
1707 T1/T2
1714 EMESTOP RAMP
1708
SP -13
2001
SPEED
11801
REFERENCE
11703
SIGN
2002
SPEED ERROR
IN
OUT
12001
SPEED ACT
FRS
WIN MODE
OUT OF WIN
WIN SIZE
STEP RESP
12002
12003
STEP
ST5
ST5
E-
ACCEL1
T+
ACCEL2
DECEL1
T-
DECEL2
Regolatore
di velocitá
SMOOTH1
1713 SMOOTH2
1715 SPEEDMAX
1716
SPEEDMIN
1704 FOLLOW IN
1705 FOLL ACT
1706 RES OUT
P11
0
P12
0
(10903)
RUNNING
(11205)
BC
SET ALL RAMP
VALUES TO ZERO
1718 ACC COMP.MODE
(OUT)
1719
ACC COMP.TRMIN
ST5
SP -12
ACCELCOMP
50
P2
5000
P3
10000
P4
23000
P5
0
P6
50
P7
3000
P8
10
P9
200
P10
50
2201
2202
2203
2204
2205
2206
2207
2208
2209
2210
MIN SPEED
MIN SPEED L
SPEED L1
SPEED GT L1
SPEED L2
SPEED GT L2
OVERSPEEDLIMIT
OVERSPEED
12201
12202
12203
201
P3
20000
203
204
CONSTANTS (12511)
CONSTANTS (12510)
2302
2303
2304
TORQUE/CURRENT LIMITATION
SPC TORQ MAX
Min
SPC TORQ MIN
Max
TREF TORQ MAX
Min
TREF TORQ MIN
Max
SPC TORQMAX1 12301
SPC TORQMIN1 12302
TREF TORQMAX112303
TREF TORQMIN1 12304
TORQ MAX2 12305
TORQ MIN2 12306
P1
4000
P2
-4000
P3
16000
P4
100
2305
TORQ MAX
Min
STALL.TORQUE
STALL.TIME
2306
TORQ MIN
Max
MON.MEAS LEV
MON.EMF V
P5
200
Morsetto
P6
4095
AO1
IN
AO1 NOMINAL V
SDCS-CON-2
P7
0V
AO1
AO1 OFFSET V
X4:
0
BRAKE CONTROL
(303)
2301
12204
STALL.SPEED
10 7
P2
202
CONSTANTS (12510)
STALL.SEL
SP -81
10000
DRIVE LOGIC
CONSTANTS (12511)
ST20
P1
TORQ REF HANDLING
SP -10
SPMONI_2
SPEED MONITOR
SPEED ACT
P1
11702
AO1 NOMINAL VALUE
P8
P9
ST5
P10
P11
P12
P13
2315
2316
2317
2307
2308
-4095
(12102)
2309
20000
2310
16383
2311
16383
2312
16383
2313
16383
2314
16383
(11001)
GEAR.START TORQ
GEAR.TORQ TIME
T
t
GEAR.TORQ RAMP
ARM CURR LIM P
CURR LIM P
Min
ARM CURR LIM N
Max
x x y
y 4192
SPEED ACT
CURR LIM N
12308
x x y
y 4192
MAX CURR LIM SPD
ARM CURR LIM N1
12307
I
ARM CURR LIM N2
ARM CURR LIM N3
ARM CURR LIM N4
n
ARM CURR LIM N5
FLUX REF1
ST5
DCS 500B Struttura software
Software version:
Schematics:
Library:
S21.233
S21V2_0
DCS500_1.5
e di motore
5000
0
P3
4095
208 AO2 NOMINAL VALUE
0V
AO2
X4:
P2
II D 4-4
10 8
P1
SP -80
AO2
205 IN
206 AO2 NOMINAL V
207 AO2 OFFSET V
3ADW000066R0904 DCS500 System description i i
ST5
1/8
2/8
3ADW000066R0904 DCS500 System description i i
3/8
SP -9
SP -14
2006
TORQ REF HANDLING
KP
DROOPING
2008
TORQ REF
HANDLING (12403)
TORQ REF
HANDLING (12402)
2009
2010
2011
2012
2007
OUT
BAL
SET1
BALREF
VAL1
BAL2
SET2
BAL2REF
VAL2
HOLD
HOLD
RINT
CLEAR
IN LIM
2407
12004
12005
2408
P1
P2
P3
P4
P5
P6
P7
P8
0
12403
SEL2:TORQ/SPEED
1
SEL2:OUT
2
SEL2.TREF EXT
Max
(12001)
SP ERR
SEL2:IN_LIM
12402
SPEED CONTROL
(2010)
12404
3
4
5
(11702)
FREE SIGNALS (12520)
P1
1
SPC TORQMIN1
(11205)
2014
500
2015
0
2016
0
2017
500
2018
5000
2013
0
2019
0
2020
50
0
SEL2.TREF SPC
Min
SPC TORQMAX1
(10903)
TREFHND2
SPEED CONTROL
IN
ACCELCOMP
2409
2406
SEL2.TORQ STEP
SEL2.TREF SEL
TORQ MAX2
RUNNING
TORQ MIN2
SET OUT TO ZERO
BC
(10903)
KP
-1
RUNNING
ST5
SET OUTPUTS TO ZERO
KPSMIN
KPSPOINT
KPSWEAKFILT
KI
Torque ref
DROOPING
TD
TF
ST5
SP -8
TORQ REF SELECTION
2401
FREE SIGNALS (12521)
FREE SIGNALS (12519)
P1
0
P2
0
2403
2404
2402
2405
TREF A
SEL1:OUT
LOAD SHARE
12401
TREF B
TREF A FTC
TREF B SLOPE
TREF TORQMAX1
TREF TORQMIN1
(10903)
RUNNING
ST5
SETS SEL1:OUT TO ZERO
-1
Limitazione di coppia/corrente
EMFCONT2
SP -34
EMF CONTROL
P11
0
1001
FIELD MODE
1001=1,3,5
(10907)
EMESTOP ACT
1004
FLUX REF SEL
1002
CONSTANTS (12512)
FLUX REF
(12102)
SPEED ACT
P2
P13
P14
20000
23100
0
100%
FLUX REF 1
100%
1012 FIELD WEAK POINT
1017 GENER.WEAK POINT
1018 FIELD WEAK DELAY
FLUX REF SUM
P1
P12
P3
P4
1006
100
1016
160
(10506)
1007
150
1008
4905
50
P5
P6
410
P7
-4095
P8
P9
1187
P10
3255
2190
11002
cal
generatoric
DRIVE MODE
(1201)
EMESTOP ACT
(10907)
1005 EMF REF SEL
1003 EMF REF
CONSTANTS (12509)
11001
F CURR REF
1201=10
TRef2
11003
0
40 70 90
&
LOCAL EMF REF
GENER.EMF REF
EMF ACT
EMF KP
EMF KI
1011 EMF REL LEV
1009 EMF REG LIM P
1010 EMF REG LIM N
1013 FIELD CONST 1
Regolatore di tensione motore
1014 FIELD CONST 2
1015 FIELD CONST 3
II D 4-5
ST10
3ADW000066R0904 DCS500 System description i i
2/8
1/8
3/8
3ADW000066R0904 DCS500 System description i i
4/8
C_CNTR_3
SP -75
CURRENT CONTROL
ARM CURR REF
FLUX N
401
SPEED CONTROL (2011)
CONSTANTS (12526)
CONSTANTS (12527)
0
P2
1366
P3
300
P4
3200
P5
2050
P6
150
P7
15
P8
0
P9
0
P10
0
P11
40
TORQ REF
12-PULS
[1209] 1,2
FLUX REF1
402
403
404
P1
ARM CUR ACT
405
CURR REF IN LIM
CURR DER IN LIM
ARM DIR
CURR REF
CURR STEP
ARM ALPHA
BLOCK
10405
10403
10404
10402
10401
DATA LOGGER (606)
t
REF TYPE SEL
406
ARM CURR REF SLOPE
415 ARM CURR LIM P
416 ARM CURR LIM N
407
408
409
ARM CURR PI KP
ARM CURR PI KI
ARM CONT CURR LIM
412
ARM ALPHA LIM MAX
413 ARM ALPHA LIM MIN
414 DXN
410 ARM L
411
ARM R
417 ARM CURR CLAMP
Regolatore corrente
d'armatura
STSYN
DCFMOD
SP -105
C_MONIT
SP -104
DCF FIELDMODE
P1
0
1215
DCF MODE :
0
1
2
1 2
2
DI2 (10703)
P2
0
:
:
:
3
:
4
:
5
:
6 :
45 6
45 6
1216 DI/OVP
1217
CURRENT MONITOR
Disabled
DCF Current Control
Stand Alone
Reserved
Fexlink Node 1
Fexlink Node 2
MG Set
P1
P2
7
Cur.Controller for high inductive load
... 407 x8
ARM_CURR_PI_KP
ARM_CURR_PI_KI
... 408 x8
ARM_CONT_CUR_LIM
0 409
3601
REV_DELAY
15
3602
REV_GAP
15
3603
FREV_DELAY
15
P3
0
P4
0
419
CUR RIPPLE LIM
0
1
2
3
A137
F34
A137
F34
CUR RIPPLE MONIT
ZERO CUR DETECT
INTERNAL
0
1
CURRENT ZERO
SIGNAL
STSYN
BC
A121
F 21
as FEX 1 (Receiver)
as FEX 2 (Receiver)
6
RUN DCF
RESET DCF
F1 CURR GT MIN L
F1 CURR MIN TD
F1 OVERCURR L
F1 CURR TC
F1 KP
F1 KI
F1 U LIM N
F1 U LIM P
10916
10917
11303
Fexlink as Transmitter
for FEX1 and FEX2
SP -30
MOTOR 1 FIELD
FANS ON
(10908)
DRIVE MODE 1201=7
(1201)
1313 F1 RED.SEL
0
FIELD MODE 1001=1,3,5
(1001)
1301 F1 REF
100%
1314 F1 SEL.REF
1228
TEST REF2
1302 F1 FORCE FWD
0%
1303 F1 FORCE REV
1304 F1 ACK
1305
1321
1306
1307
1308
1309
1311
1312
420
Monit. 1
method 2
EXTERNAL
via Options
REF DCF
2047
200
4710
0
1
20
-4096
4096
421
Input for external Overvoltg.Protection
from ext. FEXLINK
P3
P10
P4
P5
P6
P7
P8
P9
F03
DriveLogic
Iact
0
1
5
P2
CURRENT
RISE MAX
OVP SELECT
4
P1
32767
418
SDCS-FEX-2
or
DCF503/504
or
P1
(10908)
FANS ON
(1201)
DRIVE MODE 1201=7
1510
F2 RED.SEL
0
CONSTANTS (12512)
F1 CURR REF
M2FIELD2
SP -28
M1FIELD2
11301
P2
1228
1501 F2 REF
1511 F2 SEL.REF
MOTOR 2 FIELD
100%
TEST REF2
F1 CURR ACT
11302
DATA LOGGER
(605)
DCF501/502
P3
P4
P5
P6
P7
P8
P9
2047
4710
0
1
20
-4096
4096
1502
1503
1504
1505
1506
1508
1509
F2 CURR GT MIN L
F2 OVERCURR L
F2 CURR TC
F2 KP
F2 KI
F2 U LIM N
F2 U LIM P
F2 CURR REF
11501
0%
SDCS-FEX-2
or
DCF503/504
or
DCF501/502
F2 CURR ACT 11502
ST20
ST20
SP -24
SP -26
MOTOR 2 FIELD OPTIONS
MOTOR 1 FIELD OPTIONS
P1
10
P4
100
P5
614
P6
200
P7
80
P8
80
P9
0
1310 F1 U AC DIFF MAX FREE WHEELING
P1
10
1507
F2 U AC DIFF MAX FREE WHEELING
ST20
1315
1316
1317
1318
1319
1320
OPTI.REF GAIN
OPTI.REF MIN L
OPTITORQUE
II D 4-6
OPTI.REF MIN TD
REV.REV HYST
REV.REF HYST
REV.FLUX TD
FIELD REVERSAL
Regolatore corrente di campo 1 e 2
3ADW000066R0904 DCS500 System description i i
ST20
3/8
1/8
4/8
3ADW000066R0904 DCS500 System description i i
5/8
Morsetto
SDCS-CON-2
SP -63
DI7
7
X6:
O1
ON/OFF
O2
Ingressi e uscite digitali (standard)
10713
10714
ST5
SP-36
901
SP -62
DI8
8
X6:
O1
RUN
O2
902
10715
10716
REF SEL (1911)
BRAKE CONTROL (302)
ST5
904
905
SP -65
DI5
5
X6:
O1
EM STOP
O2
906
10709
SP -64
DI6
6
X6:
O2
10711
908
10712
909
910
911
SP -69
DI1
1
X6:
O1
O2
912
10701
913
10702
ST5
SP -68
DI2
2
X6:
O1
O2
10703
10704
DCF FIELDMODE
(1216)
ST5
SP -67
DI3
3
X6:
O1
MAIN CONT
RUNNING 10903
FAULT 10904
COAST STOP
ALARM 10905
RAMP GENERATOR
TORQ REF SELECTION
TORQ REF HANDLING
EMESTOP ACT 10907
LOCAL 10906
EME STOP
MAINTENANCE
MIN SPEED
(12201)
BC (BLOCK.)
(11205)
907
ST5
MOTOR FAN
1
RUN3
RUN2
RESET
O1
CONV FAN
RDY ON 10901
RDY RUNNING 10902
RUN1
LOCAL
10710
ST5
RESET
903
CONST REF (11902)
DRLOGI_2
DRIVE LOGIC
ON/OFF
O2
10705
P1
0
P2
1
P3
0
P4
0
P5
0
P6
0
P7
0
P8
2
914
915
916
917
918
919
920
921
10706
START INHIBIT
DISABLE LOCAL
FAN ON 10908
ACK CONV FAN
MOTOR 1/2 FIELD
FIELD ON 10909
ACK MOTOR FAN
MAIN CONT ON 10910
MOTOR ACT 10913
ACK MAIN CONT
MOTOR2
TRIP DC BREAKER 10911
FIELD HEAT SEL
DYN BRAKE ON 10912
MAIN CONT MODE
STOP MODE
EME STOP MODE
PANEL DISC MODE
PWR LOSS MODE
AUTO-RECLOSING 10914
COMFAULT MODE
COMM FAULT 10915
COMFLT. TIMEOUT
T20
ST5
SP -66
DI4
4
X6:
O1
O2
10707
Must be connected, when no fan acknowledges (DI1, DI2)
10708
ST5
Ingressi digitali
aggiutivi
Morsetto
SDCS-IOE-1
1
X1:
SP-61
DI9
O1
Non utilizzato
O2
2
X1:
Non utilizzato
ST5
SP-60
DI10
Ingressi e uscite per fieldbus
SP -91
DATASET 1
10717
10122
OUT1
10123
OUT2
10124
OUT3
10718
IN
ST5
O1
O2
10719
10720
ST5
SP-59
3
X1:
DI11
Non utilizzato
O1
O2
10721
10722
ST5
SP-58
SP -93
DATASET 3
4
X1:
DI12
Non utilizzato
O1
O2
IN
10724
ST5
ST5
ST5
SP-57
6
X1:
DI13
Non utilizzato
10125
OUT1
10126
OUT2
10127
OUT3
10723
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
P01
P02
P03
P04
P05
P06
P07
P08
P09
P10
P11
P12
P13
P14
P15
SP-95
FLBSET_2
FIELDBUS
4001
FIELDBUS PAR.1
4002
(MODULE TYPE)
4003
4004
4005
4006
4007
4008
4009
4010
Parameters
4011
depends of
modul type
4012
4013
4014
4015
O1
O2
10725
10726
ST5
SP-56
7
X1:
DI14
Non utilizzato
O1
O2
10727
Ingressi e uscite per 12 impulsi
10728
ST5
SP-55
8
X1:
O1
O2
12-PULSE LOGIC
BRIDGE REVERSAL LOGIC
active, if [1209]= 1 or 2
INPUT X18
10729
13617
X18:13
13618
X18:14
13619
X18:15
13620
X18:16
10730
ST5
SP -86
AI5
AI5:OUT+
2 1
X2:
AI5:OUT-
+
--
AI5:ERR
0
116 AI5 CONV MODE
P2
2000
117 AI5 HIGH VALUE
P3
-2000
118 AI5 LOW VALUE
P1
P1
P2
P3
10116
10117
1
10
10
10118
3610 Revers.Logic
3601
REV DELAY
3602
REV GAP
3603
FREV DELAY
ON/OFF LOGIC
3607 INHIB Logic
Non utilizzato
5 4
X2:
+
--
P4
P5
AI6:ERR 10121
119 AI6 CONV MODE
0
P2
2000
120 AI6 HIGH VALUE
P3
-2000
121 AI6 LOW VALUE
10
150
3605 DIFF CURRENT
3606 DIFF CURR DELAY
13616
13621
13601
Conv.Curr.Slave
13602
Arm.Curr.Slave
13603
Conv.Curr.Both
13604
Arm.CURR.Both
13615
Fault Current
CURRENT REFERENCE
3ADW000066R0904 DCS500
3615
ADJ REF1
3604 IACT SLAVE
AI2 (10107)
System description i i MASTER
6-PULSE
P6
ST5
4/8
BC not Zero
CURRENT ANALYSIS
active, if [1209] = 1
AI6:OUT+ 10119
AI6:OUT- 10120
P1
Logic f. INHIBIT
(11205)
BC
3616 BC Logic
ST5
SP -85
AI6
13611
Bridge
13606
IREF1-Polarity
13609
IREF2-Polarity
13607
IREF1-Pol.Master
13610
IREF2-Pol.Broth
13612
Bridge of Slave
13613
Indicat.Revers
13614
Fault Reversion
3608 IREF0 Logic
3609 Bridge Logic
STSYN
Non utilizzato
12PULS_2
SP -99
SP -97
DI15
Non utilizzato
2048
II D [1209]
4-7 Curr.Ref.2 13608
*
2048
Curr.Ref.1
Res. f.Commun
13605
13622
STSYN
5/8
3ADW000066R0904 DCS500 System description i i
6/8
Morsetto
SDCS-CON-2
808
INV IN
SP -100
RDY RUNNING
(11208)
4
SP -46
DO4
IN
X7:
807
T20
INV IN
T20
1000
P3
0
P4
100
1
FAN CONT
(10906)
LOCAL
1201
DRIVEMODE
(11209)
P2
X7:
SP -49
DO1
801
IN
802
INV IN
RUNNING
0
5
810
SP -45
DO5
IN
X7:
809
P1
SP -48
DO2
803
IN
804
INV IN
P6
1
P7
358
2
250
X7:
P5
0
SP -47
DO3
805
IN
806
INV IN
T20
P10
6
INV IN
X7:
MAIN CONT
Relay output
SDCS-POW-1
SP -44
DO6
IN
812
SPEED MESUREMENT (12103)
SETTINGS (10505)
1 2
811
P11
1206
0
1202
1203
1207
1208
1209
1213
1210
1211
1212
1214
&
I1=I2
RELEASE OF ARM.
CONTROLLING
TEST REF SEL
0
4
ARM. CONTROLLER
POT1 VALUE
1
7
FIRST FIELD EXCITER
POT2 VALUE
2
8
SECOND FIELD EXCITER
PERIOD
t
BTW.POT1/2
3
9
4
10
0
SPEED LOOP
EMF CONTROLLER
TEST REF
SQUARE WAVE
DRIVE ID
WRITE ENABLE KEY
WRITE ENABLE PIN
SELECT OPER.SYST
DRIVE LOGIC
RAMP GENERATOR
12 PULSE LOGIC
11203
FEXC STATUS
11210
FEXC1 CODE
11220 FEXC1 SW VERSION
11211
FEXC1 COM STATUS
FEXC1 COM ERRORS 11212
11213
FEXC2 CODE
11221 FEXC2 SW VERSION
FEXC2 COM STATUS 11214
11215
FEXC2 COM ERRORS
FIELDBUS NODE ADDR
ACTUAL VALUE 1
ACTUAL VALUE 2
11206
11204
TC STATUS
11201 COMMIS STAT
11205
BC
11202 BACKUPSTOREMODE
11222 PROGRAM LOAD
11216
11218 CNT SW VERSION CMT COM ERRORS
11217
11219 CNT BOOT SW VER CDI300 BAD CHAR
CMT DCS500 ADDR
CDP312
ACTUAL VALUE 3
MACRO SELECT
Manutenzione
7
SP -43
DO7
IN
X7:
814
1205
4
T5
T20
813
1
SETTINGS (10501)
X96:
SP -42
DO8
815
IN
816
INV IN
T20
3
358
P9
X7:
P8
T20
MAIN CONT
1204
(11207)
T20
EXC CONT
MANTUN_3
MAINTENANCE
TEST RELEASE
INV IN
T20
SP -92
DATASET 2
209
IN1
210
IN2
211
IN3
ST5
OUT
Monitoraggio
SP -94
DATASET 4
212 IN1
213 IN2
214 IN3
ST5
SP -76
OUT
P1
110
P2
230
P3
80
P4
60
P5
5000
P6
0
P7
4
P8
P9
10
0
511
512
508
509
510
514
515
516
527
CONPROT2
CONVERTER PROTECTION
ARM OVERVOLT LEV
ARM OVERCURR LEV
U NET MIN1
U NET MIN2
PWR DOWN TIME
EARTH.CURR SEL
EARTH.FLT LEV
EARTH.FLT DLY
CONV TEMP DELAY
ST20
SP -22
SP -98
OUTPUT X18
3611
3612
3613
3614
P1
0
X18:09
X18:10
X18:11
X18:12
P2
0
P3
0
STSYN
P4
4096
P5
120
P6
130
P7
240
M1PROT_2
MOTOR 1 PROTECTION
1401
MOT1.TEMP IN
1402
11401
MOT1.TEMP ALARM L MOT1 MEAS TEMP
1403
MOT1.TEMP FAULT L
1404
KLIXON IN
1405
11402
MODEL1.SEL
MOT1 CALC TEMP
1406
MODEL1.CURR
1407
MODEL1.ALARM L
1408
MODEL1.TRIP L
1409
MODEL1.TC
ST20
SP -21
II D 4-8
P1
0
P2
0
P3
0
P4
4096
P5
120
P6
130
P7
240
3ADW000066R0904 DCS500 System description
ii
M2PROT_2
MOTOR 2 PROTECTION
1601
MOT2.TEMP IN
11601
1602
MOT2.TEMP ALARM L MOT2 MEAS TEMP
1603
MOT2.TEMP FAULT L
1604
11602
MODEL2.SEL
MOT2 CALC TEMP
1605
MODEL2.CURR
1606
MODEL2.ALARM L
1607
MODEL2.TRIP L
1608
MODEL2.TC
ST20
5/8
6/8
3ADW000066R0904 DCS500 System description i i
7/8
SP -7
P1
0
"EXT. IND. 1"
P3
0
SP-102
1101 IN USER EVENT 1
1102
TYPE
1103 TEXT
1104
SPEED MEASUREMENT (12102)
DLY
ST20
SP -6
P1
0
"EXT. IND. 2"
P3
0
1107 TEXT
1108 DLY
602
SETTINGS (10505)
603
SETTINGS (10504)
604
MOTOR 1 FIELD (11302)
605
P1
1
P2
20000
P3
200
P4
3
"EXT. IND. 3"
P3
0
606
607
608
609
610
611
SP -5
0
601
SETTINGS (10501)
CURRENT CONTROL (10401)
1105 IN USER EVENT 2
1106 TYPE
ST20
P1
DATALOG
DATA LOGGER
612
1109 IN USER EVENT 3
1110
TYPE
1111 TEXT
613
IN1 Ch.1
IN2 Ch.2
IN3 Ch.3
IN4 Ch.4
IN5 Ch.5
IN6 Ch.6
DLOG.TRIGG COND
DLOG STATUS
10601
DLOG.TRIGG VALUE
CMT-TOOL
DLOG.TRIGG DELAY
TRIG
STOP
RESTART
DLOG.SAMPL INT
DLOG.TRIG
0
DLOG.STOP
0
DLOG.RESTART
0
TRIG
STOP
RESTART
T1ms
1112 DLY
ST20
SP -4
1113 IN
P1
0
"EXT. IND. 4"
P3
0
1114
USER EVENT 4
Registrazione eventi
TYPE
1115 TEXT
1116
DLY
ST20
SP -3
1117 IN
P1
0
"EXT. IND. 5"
P3
0
1118
USER EVENT 5
TYPE
1119 TEXT
1120
DLY
ST20
Segnali aggiuntivi
SP -2
1121 IN
P1
0
"EXT. IND. 6"
P3
0
USER EVENT 6
1122
TYPE
1123 TEXT
1124
DLY
SP -73
ST20
CONSTANTS
0
-1
1
Eventi utilizzatore
2
10
100
1000
31416
EMF:100%
TORQ:100%
TORQ:-100%
CUR,FLX,VLT: 100%
CUR,FLX,VLT:-100%
Controllo freno
SPEED: 100%
SPEED:-100%
12501
CONST_0
12502
CONST_M1_TRUE
12503
CONST_1
12504
CONST_2
12505
CONST_10
12506
CONST_100
12507
CONST_1000
12508
CONST_31416
12509
EMF_MAX
12510
TORQ_MAX
12511
TORQ_MAX_N
12512
CONST_4095
12513
CONST_M4095
12514
CONST_20000
12515
CONST_M20000
ST
SP -74
FREE SIGNALS
12516
SIG1(SPEED REF)
12517
SIG2(SPEED STEP)
12518
SIG3(TORQ. REF A)
12519
SIG4(TORQ. REF B)
12520
SIG5(TORQUE STEP)
12521
SIG6(LOAD SHARE)
12522
SIG7(FLUX REF)
12523
SIG8(EMF REF)
12524
SIG9(FORCE_FWD)
12525
SIG10(FORCE REV)
12526
SIG11(CURR. REF)
12527
SIG12(CURR._STEP)
SP -32
(10902)
(10503)
BRAKE CONTROL
RESET
TORQUE ACT
301 HOLD REF
DI8 (10715)
SPEED MONITOR (12201)
P1
0
P2
0
P3
0
P4
0
TREF OUT
10301
LOCAL
302 BR RELEASE TREF ENABLE 10302
303 MIN SP IND DECEL CMND 10303
10304
304 ACT BRAKE
LIFT BRAKE
10305
305
START DELAY BRAKE RUN
306
STOP DELAY
307
HOLD TORQ
308
EMESTOP BRAKE
ST20
SPEED_STEP
TORQ_REF_B
TORQ_STEP
LOAD_SHARE
CUR_REF
CUR_STEP
ST
FLTHNDL
SP-103
FAULT HANDLING
FAULT WORD 1
FAULT WORD 2
FAULT WORD 3
LATEST FAULT
ALARM WORD 1
ALARM WORD 2
ALARM WORD 3
LATEST ALARM
OPERATING HOURS
11101
11102
11103
11107
11104
11105
11106
11108
11109
T20
II D 4-9
3ADW000066R0904 DCS500 System description i i
6/8
7/8
3ADW000066R0904 DCS500 System description i i
8/8
Scelta riferimento di velocità
Il riferimento di velocità per il generatore della funzione di rampa è generato dai blocchi REF
SEL, che possono essere utilizzati per selezionare il valore di riferimento necessario, il
blocco CONST REF, che genera un massimo di 4 valori di riferimento settabili a titolo permanente, il blocco SOFTPOT, che riproduce la funzione di un motopotenziometro unitamente al
blocco RAMP GENERATOR, oppure dal blocco AI1 (ingresso analogico 1).
Il blocco RAMP GENERATOR contiene un generatore della funzione di rampa con 2 rampe
di salita e di discesa, 2 valori di tempo per la curva a S, le condizioni di limitazione per i limiti
superiore e inferiore, la funzione di mantenimento e le funzioni di "inseguimento" del riferimento o della retroazione di velocità. Un segnale speciale è disponibile per il trattamento
dell'accelerazione e della decelerazione.
Il blocco REF SUM abilita l’uscita del generatore della funzione di rampa e un segnale definibile dall’utente da aggiungere.
Calcolo retroazione di velocità
Questa pagina mostra la routine di condizionamento per i valori di riferimento e di retroazione
della velocità. Il blocco AITAC viene utilizzato per leggere la retroazione di velocità da una
tachimetrica analogica Il blocco SPEED MEASUREMENT elabora i 3 possibili segnali di
retroazione: tachimetrica analogica, generatore di impulsi o tensione di uscita del convertitore
(SPEED_ACT_EMF) - in funzione del blocco EMF TO SPEED CALC (se 2102=5 , la funzione di indebolimento di campo non è disponibile). I parametri vengono utilizzati per
attivare le funzioni di livellamento, selezionare il valore di retroazione e, ove applicabile, per
settare la velocità massima. Questo parametro serve anche per scalare l'anello di controllo
della velocità.
Il blocco SPEED MONITOR contiene la funzione di monitoraggio della tachimetrica e di stallo
del motore e confronta un valore di retroazione di velocità selezionato con la velocità massima, la velocità minima e 2 soglie settabili.
Il blocco AO1 rappresenta un’uscita analogica scalabile.
motore superiore anche con sistemi a 4 quadranti è possibile impostare mediante i parametri
due diversi punti di indebolimento di campo.
Regolatore corrente di campo 1 e 2
Poiché un convertitore di potenza DCS può controllare due unità di campo, alcuni dei blocchi
funzione sono duplicati. Questo significa che, a seconda della configurazione meccanica
degli azionamenti, si possono controllare due motori in parallelo o alternatamente. La configurazione della struttura del software può essere generata progettando in maniera appropriata i blocchi durante la routine di messa in funzione.
Il blocco MOTOR1 FIELD / MOTOR2 FIELD legge il valore di riferimento della corrente di
campo e tutti i valori specifici dell’unità di alimentazione di campo per trasferirli al convertitore
di potenza di campo attraverso un collegamento seriale interno; il convertitore di potenza di
campo viene scalato in funzione del rispettivo hardware, ed effettua la regolazione della
corrente di campo. La direzione della corrente di campo per il motore 1 può essere determinata utilizzando comandi binari, mentre per il motore 2 può essere generata nel corso
dell’applicazione a monte del blocco di interesse.
Il blocco MOTOR1 FIELD OPTIONS/MOTOR2 FIELD OPTIONS controlla la funzione di
libera circolazione in presenza della minima tensione di rete e la funzione di inversione della
corrente di campo con gli azionamenti dotati della funzione di inversione di campo (solo per il
motore 1). Nel caso degli azionamenti dotati della funzione di inversione di campo, è prevista
un’opzione per influire selettivamente sulla coppia del circuito di indotto e sulla riduzione e
l'aumento della corrente di campo.
Ingressi e uscite digitali (standard)
Il blocco DRIVE LOGIC legge vari segnali dal sistema attraverso gli ingressi digitali DIx, li
elabora e genera dei comandi che vengono trasmessi al sistema attraverso le uscite digitali
DOx, ad esempio per il controllo del contattore di rete del convertitore di potenza, il contattore
del circuito di campo o i contattori di vari ventilatori, oppure per la trasmissione in uscita dei
messaggi di stato.
Regolatore di velocità
Il risultato viene confrontato con la retroazione di velocità dal blocco SPEED
MEASUREMENT utilizzando il blocco SPEED ERROR e quindi trasferito al regolatore di
velocità. Questo blocco permette la valutazione della deviazione del sistema per mezzo di un
filtro. Inoltre, è possibile in questo ambito effettuare i settaggi necessari per il modo operativo
“Window”. Se la retroazione di velocità dell’azionamento compare all'interno di una finestra in
corrispondenza del valore di riferimento, il regolatore di velocità viene “bypassato” (se è stato
attivato il modo "Window”; l’azionamento è controllato attraverso un valore di riferimento di
coppia in corrispondenza del blocco TORQ REF HANDLING). Se la retroazione di velocità è
al di fuori della finestra, il regolatore di velocità viene attivato, riportando la velocità effettiva
dell’azionamento all'interno della finestra.
Il blocco SPEED CONTROL contiene il regolatore di velocità con i valori di P, I e DT1. Ai fini
della funzione di adattamento, riceve un’amplificazione P variabile.
Limitazione di coppia / corrente
Il “riferimento di coppia” generato dal regolatore di velocità viene trasferito all’ingresso del
blocco CURRENT CONTROL tramite il blocco TORQ REF HANDLING, dove viene convertito
in un valore di riferimento di corrente e utilizzato per la regolazione della corrente. Il blocco
TORQUE/CURRENT LIMITATION viene utilizzato per generare i vari valori di riferimento e
le limitazioni; questo blocco contiene le seguenti funzioni: “limitazione di corrente in funzione
della velocità”, “compensazione gioco ingranaggi”, “generazione dei valori per la limitazione
della corrente statica” e “limitazione di coppia”. I valori delle varie limitazioni vengono anche
utilizzati in altri punti, ad esempio nei seguenti blocchi: SPEED CONTROL, TORQ REF
HANDLING, TORQ REF SELECTION e CURRENT CONTROL.
Il blocco AI2 (ingresso analogico 2) viene utilizzato per la lettura di un segnale analogico.
Il blocco TORQ REF SELECTION contiene una limitazione con aggiunta a monte di due
segnali, uno dei quali può essere instradato attraverso un generatore della funzione di rampa;
l'altra valutazione del segnale può essere modificata dinamicamente utilizzando un moltiplicatore.
Il blocco TORQ REF HANDLING determina il modo operativo dell'azionamento. Se si trova
nella posizione 1, significa che è attivato il modo di controllo della velocità, mentre se si trova
nella posizione 2, significa che è attivato il modo di controllo della coppia (senza controllo ad
anello chiuso poiché nell’unità non è disponibile una retroazione di coppia “pura”). In entrambi
i casi, il valore di riferimento necessario proviene dall’esterno. Le posizioni 3 e 4 sono una
combinazione delle prime due opzioni sopra indicate. Si osservi che, con la posizione 3, il
valore più basso tra il riferimento di coppia esterno e l’uscita del regolatore di velocità viene
trasferito al regolatore di corrente, mentre con la posizione 4 il valore preso in considerazione è il maggiore. La posizione 5 utilizza entrambi i segnali, e corrisponde al metodo di funzionamento del modo “Window”.
Regolatore corrente d'armatura
Il blocco CURRENT CONTROL contiene il regolatore di corrente con il valore di P e I, più un
adattamento nel campo del flusso della corrente continua. Questo blocco contiene anche le
funzioni per la limitazione dell’aumento di corrente, la conversione del valore del riferimento
di coppia in un valore di riferimento di corrente per mezzo del punto di incrocio del campo, e
alcuni parametri che descrivono la rete di alimentazione e il circuito di carico.
Per le applicazioni con carico induttivo e performance dinamiche elevati si utilizza un hardware diverso per generare una corrente di segnale uguale a zero. Questo hardware viene selezionato dal blocco CURRENT MONITOR. Le funzioni di monitoraggio corrente possono a
questo punto essere adattate ai requisiti dell'applicazione. Ciò consente di assicurare una più
facile manipolazione e un grado più elevato di sicurezza per azionamenti ad prestazioni
elevate come, ad esempio, i banchi di prova.
La modalità DCF può essere attivata attraverso il blocco DCF FIELDMODE. In questa modalità si possono specificare le funzionalità. In base alla funzione selezionata, il regolatore di
corrente riceve una diversa caratteristica, viene monitorata la protezione da sovratensione
DCF 506 viene instradato il riferimento di corrente e di campo attraverso i morsetti X16:.
Ingressi digitali aggiuntivi
I blocchi AI3 e AI4 rappresentano altri 2 ingressi analogici non ancora assegnati ad alcuna
particolare funzione. I blocchi A15 e A16 rappresentano altri 2 ingressi aggiuntivi che sono
attivi soltanto se è collegata la scheda SDCS-IOE1. Con questo hardware aggiuntivo, si
rendono disponibili altri 7 ingressi digitali DI 9 .. DI15.
Ingressi e uscite per fieldbus
Se i segnali analogici e digitali non sono sufficienti per il controllo dell'azionamento, è necessario utilizzare un modulo bus di campo con riferimenti di comunicazione seriale (sono disponibili apparecchiature per l'installazione di Profibus, CS31, Modbus ecc.).Questo tipo di
modulo è attivato per mezzo del blocco FIELDBUS. I dati trasferiti dal controllo al convertitore
vengono memorizzati nei blocchi DATASET1 e DATASET3 come informazioni a 16 bit. A
seconda dell'applicazione, per trasmettere i messaggi, i pin di uscita di questi blocchi devono
essere collegati ai pin di ingresso di altri blocchi. La stessa procedura vale per i blocchi
DATASET2 e DATASET4, se collegati. Questi blocchi trasmettono le informazioni dal convertitore al sistema di controllo.
Ingressi e uscite per 12 impulsi
Il convertitore può essere configurato in un'applicazione parallela a 12 impulsi. In questo
caso, occorrono: due convertitori con indotto identici; un'unità di alimentazione di campo; una
reattanza T; cavo piatto di comunicazione collegato a X 18 dei due convertitori; La LOGICA A
12 IMPULSI deve essere attivata e garantisce il controllo sincrono dell'azionamento MASTER
e SLAVE.
Manutenzione
Il blocco MAINTENANCE fornisce valori di riferimento e condizioni di prova per consentire a
tutti i regolatori di essere tarati in base al convertitore di potenza. Se il pannello viene utilizzato come sistema di misura nello sportello dell'armadio possono essere definiti in questa
sede una serie di segnali.
Monitoraggio
Il blocco CONVERTER PROTECTION tiene sotto controllo il circuito d’indotto per individuare
condizioni di sovratensione e sovracorrente e controlla inoltre la rete per individuare condizioni di minima tensione. Costituisce un’opzione per leggere la corrente totale delle 3 fasi
attraverso un sensore esterno aggiuntivo e per tenere sotto controllo la condizione di "diverso
da zero". Vengono effettuati adattamenti per applicazioni di ricostruzione che mantengono la
sezione di potenza e il ventilatore al fine di identificare eventuali condizioni di sovraccarico e
guasti del ventilatore.
Il blocco MOTOR1 PROTECTION, nella sua parte superiore, valuta il segnale proveniente
dal sensore di temperatura analogico o da un Klixon. Nella parte inferiore calcola invece il
surriscaldamento del motore con l'ausilio del valore di retroazione della corrente e di un
modello del motore, dopodiché trasmette un messaggio in uscita.
Il blocco MOTOR2 PROTECTION funziona nello stesso modo del blocco MOTOR1
PROTECTION, ma senza valutazione Klixon.
Eventi utilizzatore
Usando il blocco USER EVENT1 fino a USER EVENT6 vengono creati sei differenti messaggi, che sono visualizzati come guasti o allarmi sul pannello CDP312 come pure sul display a
7 segmenti del convertitore
Controllo freno
Il blocco BRAKE CONTROL genera tutti i segnali necessari per il controllo di un freno meccanico.
Registrazione eventi
Dati di linea e di motore
Il blocco SETTINGS serve per l'adattamento di tutti i segnali importanti come la tensione di
rete la tensione e la corrente del motore e la corrente di campo. Sono disponibili parametri
per regolare il controllo in condizioni speciali come reti deboli o interazioni con sistemi di filtri
di armoniche. Si può selezionare la lingua desiderata per la visualizzazione delle informazioni
sul display della pulsantiera di controllo.
Il blocco AO2 rappresenta un'uscita analogica scalabile.
Il blocco DATA LOGGER è in grado di registrare un massimo di sei segnali. I valori di questi
segnali vengono memorizzati in una RAM con buffer a batterie e restano quindi disponibili
anche in caso di mancanza della tensione di alimentazione. Il tempo di registrazione può
dipendere da un segnale di scatto, oltre che dal numero dei valori registrati prima e dopo il
segnale di scatto. La funzione DATA LOGGER può essere settata sia con il pannello sia con
un tool per PC. Per la valutazione dei valori registrati è consigliabile utilizzare un tool per PC.
Regolatore di tensione motore
Segnali aggiuntivi
Il blocco EMF CONTROL contiene il regolatore della tensione del circuito d’indotto (regolatore EMF). Si basa su una struttura parallela comprendente un regolatore PI e una funzione di
pre-controllo, generata con una caratteristica 1/x. Il rapporto fra i due percorsi può essere
settato. La variabile di uscita di questo blocco è il valore di riferimento
della corrente di cam3ADW000066R0904
DCS500
po, che viene prodotto dal valore di riferimento di flusso mediante un’altra funzione caratteristica utilizzando la linearizzazione. Per consentire all'azionamento di utilizzare una tensione
II D 4-10
7/8
Utilizzando il blocco FAULT HANDLING i guasti e gli allarmi dell'azionamento vengono raggruppati come informazione a 16-bit. I blocchi CONSTANTS e FREE SIGNALS possono
essere utilizzati per impostare limiti o particolari condizioni di prova.
System description i i
8/8
3ADW000066R0904 DCS500 System description i i
Lista dei parametri (con la colonna per i valori specifici del cliente)
No.
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
201
202
203
204
205
206
207
208
209
210
211
212
213
214
301
302
303
304
305
306
307
308
401
402
403
404
405
406
407
408
409
410
411
412
413
414
415
416
417
418
419
420
421
501
502
503
504
505
506
Parameter name
AITAC_CONV_MODE
AITAC_HIGH_VALUE
AITAC_LOW_VALUE
AI1_CONV_MODE
AI1_HIGH_VALUE
AI1_LOW_VALUE
AI2_CONV_MODE
AI2_HIGH_VALUE
AI2_LOW_VALUE
AI3_CONV_MODE
AI3_HIGH_VALUE
AI3_LOW_VALUE
AI4_CONV_MODE
AI4_HIGH_VALUE
AI4_LOW_VALUE
AI5_CONV_MODE
AI5_HIGH_VALUE
AI5_LOW_VALUE
AI6_CONV_MODE
AI6_HIGH_VALUE
AI6_LOW_VALUE
AO1.[IN]
AO1_NOMINAL_V
AO1_OFFSET_V
AO1_NOMINAL_VAL
AO2.[IN]
AO2_NOMINAL_V
AO2_OFFSET_V
AO2_NOMINAL_VAL
DATASET2.[IN1]
DATASET2.[IN2]
DATASET2.[IN3]
DATASET4.[IN1]
DATASET4.[IN2]
DATASET4.[IN3]
[HOLD_REF]
[BR_RELEASE]
[MIN_SP_IND]
[ACT_BRAKE]
START_DELAY
STOP_DELAY
HOLD_TORQ
EMESTOP_BRAKE
[TORQ_REF]
[CURR_REF]
[CURR_STEP]
[BLOCK]
REF_TYPE_SEL
ARM_CURR_REF_SLOPE
ARM_CURR_PI_KP
ARM_CURR_PI_KI
ARM_CONT_CURR_LIM
ARM_L
ARM_R
ARM_ALPHA_LIM_MAX
ARM_ALPHA_LIM_MIN
DXN
[ARM_CURR_LIM_P]
[ARM_CURR_LIM_N]
ARM_CURR_CLAMP
CURRENT_RISE_MAX
ZERO_CUR_DETECT
CUR_RIPPLE_MONIT
CUR_RIPPLE_LIM
U_MOTN_V
I_MOTN_A
I_MOT1_FIELDN_A
I_MOT2_FIELDN_A
FEXC_SEL
PHASE_SEQ_CW
No.
Parameter name
No.
Parameter name
507 U_SUPPLY
920 COMFAULT_MODE
508 U_NET_MIN1
921 COMFAULT_TIMEOUT
509 U_NET_MIN2
1001 FIELD_MODE
510 PWR_DOWN_TIME
1002 [FLUX_REF]
511 ARM_OVERVOLT_LEV
1003 [EMF_REF]
512 ARM_OVERCURR_LEV
1004 [FLUX_REF_SEL]
513 EMF_FILT_TC
1005 [EMF_REF_SEL]
514 EARTH.CURR_SEL
1006 LOCAL_EMF_REF
515 EARTH.FLT_LEV
1007 EMF_KP
516 EARTH.FLT_DLY
1008 EMF_KI
517 SET_I_CONV_A
1009 EMF_REG_LIM_P
518 SET_U_CONV_V
1010 EMF_REG_LIM_N
519 SET_MAX_BR_TEMP
1011 EMF_REL_LEV
520 SET_CONV_TYPE
1012 FIELD_WEAK_POINT
521 SET_QUADR_TYPE
1013 FIELD_CONST_1
522 LANGUAGE
1014 FIELD_CONST_2
523 CURR_ACT_FILT_TC
1015 FIELD_CONST_3
524 PLL_CONTROL
1016 GENER.EMF_REF
525 UNI_FILT_TC
1017 GENER.WEAK_POINT
526 OFFSET_UDC
1018 FIELD_WEAK_DELAY
527 CONV_TEMP_DELAY
1101 USER_EVENT1.[IN]
528 PLL_DEV_LIM
1102 USER_EVENT1.TYPE
601 DLOG.[IN1]
1103 USER_EVENT1.TEXT
602 DLOG.[IN2]
1104 USER_EVENT1.DLY
603 DLOG.[IN3]
1105 USER_EVENT2.[IN]
604 DLOG.[IN4]
1106 USER_EVENT2.TYPE
605 DLOG.[IN5]
1107 USER_EVENT2.TEXT
606 DLOG.[IN6]
1108 USER_EVENT2.DLY
607 DLOG.TRIGG_COND
1109 USER_EVENT3.[IN]
608 DLOG.TRIGG_VALUE
1110 USER_EVENT3.TYPE
609 DLOG.TRIGG_DELAY
1111 USER_EVENT3.TEXT
610 DLOG.SAMPL_INT
1112 USER_EVENT3.DLY
611 DLOG.TRIG
1113 USER_EVENT4.[IN]
612 DLOG.STOP
1114 USER_EVENT4.TYPE
613 DLOG.RESTART
1115 USER_EVENT4.TEXT
801 DO1.[IN]
1116 USER_EVENT4.DLY
802 DO1.[INV_IN]
1117 USER_EVENT5.[IN]
803 DO2.[IN]
1118 USER_EVENT5.TYPE
804 DO2.[INV_IN]
1119 USER_EVENT5.TEXT
805 DO3.[IN]
1120 USER_EVENT5.DLY
806 DO3.[INV_IN]
1121 USER_EVENT6.[IN]
807 DO4.[IN]
1122 USER_EVENT6.TYPE
808 DO4.[INV_IN]
1123 USER_EVENT6.TEXT
809 DO5.[IN]
1124 USER_EVENT6.DLY
810 DO5.[INV_IN]
1201 DRIVEMODE
811 DO6.[IN]
1202 CMT_DCS500_ADDR
812 DO6.[INV_IN]
1203 DRIVE_ID
813 DO7.[IN]
1204 POT1_VALUE
814 DO7.[INV_IN]
1205 POT2_VALUE
815 DO8.[IN]
1206 PERIOD_BTW.POT1/2
816 DO8.[INV_IN]
1207 WRITE_ENABLE_KEY
901 [ON/OFF]
1208 WRITE_ENABLE_PIN
902 [RUN1]
1209 SELECT_OPER.SYST.
903 [RUN2]
1210 ACTUAL VALUE 1
904 [RUN3]
1211 ACTUAL VALUE 2
905 [COAST_STOP]
1212 ACTUAL VALUE 3
906 [EME_STOP]
1213 FIELDBUS NODE ADDR
907 [RESET]
1214 MACRO_SELECT
908 [START_INHIBIT]
1215 DCF MODE
909 [DISABLE_LOCAL]
1216 DI/OVP
910 [ACK_CONV_FAN]
1217 OVP_SELECT
911 [ACK_MOTOR_FAN]
1301 [F1_REF]
912 [ACK_MAIN_CONT]
1302 [F1_FORCE_FWD]
913 [MOTOR 2]
1303 [F1_FORCE_REV]
914 FIELD_HEAT_SEL
1304 [F1_ACK]
915 MAIN_CONT_MODE
1305 F1_CURR_GT_MIN_L
916 STOP_MODE
1306 F1_OVERCURR_L
II D 4-11
917 EME_STOP_MODE
1307 F1_CURR_TC
3ADW000066R0904
DCS500 System description i i 1308 F1_KP
918
PANEL_DISC_MODE
919 PWR_LOSS_MODE
1309 F1_KI
3ADW000066R0904 DCS500 System description i i
Lista dei parametri (con la colonna per i valori specifici del cliente)
No.
Parameter name
1310 F1_U_AC_DIFF_MAX
1311 F1_U_LIM_N
1312 F1_U_LIM_P
1313 F1_RED.SEL
1314 F1_RED.REF
1315 OPTI.REF_GAIN
1316 OPTI.REF_MIN_L
1317 OPTI.REF_MIN_TD
1318 REV.REV_HYST
1319 REV.REF_HYST
1320 REV.FLUX_TD
1321 F1_CURR_MIN_TD
1401 MOT1.[TEMP_IN]
1402 MOT1.TEMP_ALARM_L
1403 MOT1.TEMP_FAULT_L
1404 [KLIXON_IN]
1405 MODEL1.SEL
1406 MODEL1.CURR
1407 MODEL1.ALARM_L
1408 MODEL1.TRIP_L
1409 MODEL1.TC
1501 [F2_REF]
1502 F2_CURR_GT_MIN_L
1503 F2_OVERCURR_L
1504 F2_CURR_TC
1505 F2_KP
1506 F2_KI
1507 F2_U_AC_DIFF_MAX
1508 F2_U_LIM_N
1509 F2_U_LIM_P
1510 F2_RED.SEL
1511 F2_RED.REF
1601 MOT2.[TEMP_IN]
1602 MOT2.TEMP_ALARM_L
1603 MOT2.TEMP_FAULT_L
1604 MODEL2.SEL
1605 MODEL2.CURR
1606 MODEL2.ALARM_L
1607 MODEL2.TRIP_L
1608 MODEL2.TC
1701 RAMP.[IN]
1702 RAMP.[RES_IN]
1703 RAMP.[HOLD]
1704 RAMP.[FOLLOW_IN]
1705 RAMP.[FOLL_ACT]
1706 RAMP.[RES_OUT]
1707 RAMP.[T1/T2]
1708 ACCEL1
1709 DECEL1
1710 SMOOTH1
1711 ACCEL2
1712 DECEL2
1713 SMOOTH2
1714 EMESTOP_RAMP
1715 SPEEDMAX
1716 SPEEDMIN
1717 STARTSEL
1718 ACC_COMP.MODE
1719 ACC_COMP.TRMIN
1720 RAMP.[SPEED_SET]
1801 REF_SUM.[IN1]
1802 REF_SUM.[IN2]
1901 CONST_REF.[ACT1]
1902 CONST_REF.[ACT2]
1903 CONST_REF.[ACT3]
1904 CONST_REF.[ACT4]
1905 CONST_REF.DEF II D 4-12
1906 CONST_REF.REF1
1907 CONST_REF.REF2
1908 CONST_REF.REF3
No.
Parameter name
1909 CONST_REF.REF4
1910 REFSEL.[IN1]
1911 REFSEL.[SEL1]
1912 REFSEL.[IN2]
1913 REFSEL.[SEL2]
1914 REFSEL.[IN3]
1915 REFSEL.[SEL3]
1916 REFSEL.[ADD]
1917 REFSEL.[REV]
1918 SOFTPOT.[INCR]
1919 SOFTPOT.[DECR]
1920 SOFTPOT.[FOLLOW]
1921 SOFTPOT.OHL
1922 SOFTPOT.OLL
1923 SOFTPOT.[ENABLE]
2001 ERR.[IN]
2002 ERR.[STEP]
2003 ERR.[WIN_MODE]
2004 ERR.WIN_SIZE
2005 ERR.FRS
2006 SPC.[IN]
2007 SPC.[RINT]
2008 SPC.[BAL]
2009 SPC.[BALREF]
2010 SPC.[BAL2]
2011 SPC.[BAL2REF]
2012 SPC.[HOLD]
2013 SPC.DROOPING
2014 SPC.KP
2015 SPC.KPSMIN
2016 SPC.KPSPOINT
2017 SPC.KPSWEAKFILT
2018 SPC.KI
2019 SPC.TD
2020 SPC.TF
2021 ERR. [SPEED_ACT]
2101 TACHOPULS_NR
2102 SPEED_MEAS_MODE
2103 SPEED_SCALING
2104 SPEED_ACT_FTR
2105 SPEED_ACT_FLT_FTR
2201 MIN_SPEED_L
2202 SPEED_L1
2203 SPEED_L2
2204 OVERSPEEDLIMIT
2205 STALL.SEL
2206 STALL.SPEED
2207 STALL.TORQUE
2208 STALL.TIME
2209 MON.MEAS_LEV
2210 MON.EMF_V
2301 [SPC_TORQ_MAX]
2302 [SPC_TORQ_MIN]
2303 [TREF_TORQ_MAX]
2304 [TREF_TORQ_MIN]
2305 TORQ_MAX
2306 TORQ_MIN
2307 ARM_CURR_LIM_P
2308 ARM_CURR_LIM_N
2309 MAX_CURR_LIM_SPD
2310 MAX_CURR_LIM_N1
2311 MAX_CURR_LIM_N2
2312 MAX_CURR_LIM_N3
2313 MAX_CURR_LIM_N4
2314 MAX_CURR_LIM_N5
2315 GEAR.START_TORQ
2316 GEAR.TORQ_TIME
2317 GEAR.TORQ_RAMP
3ADW000066R0904
DCS500 System description i i
2401 SEL1.[TREF_A]
2402 SEL1.TREF_A_FTC
3ADW000066R0904 DCS500 System description i i
No.
Parameter name
2403 SEL1.[LOAD_SHARE]
2404 SEL1.[TREF_B]
2405 SEL1.TREF_B_SLOPE
2406 SEL2.TREF_SEL
2407 SEL2.[TREF_SPC]
2408 SEL2.[TREF_EXT]
2409 SEL2.[TORQ_STEP]
2501 TASK1_EXEC_ORDER
2502 TASK2_EXEC_ORDER
2503 TASK3_EXEC_ORDER
2504 FB_APPL_ENABLE
2505 FB_TASK_LOCK
2601-Par. f. appl. func. blocks
2701-Par. f. appl. func. blocks
2801-Par. f. appl. func. blocks
2901-Par. f. appl. func. blocks
3001-Par. f. appl. func. blocks
3101-Par. f. appl. func. blocks
3201-Par. f. appl. func. blocks
3301-Par. f. appl. func. blocks
3401-Par. f. appl. func. blocks
3601 REV_DELAY
3602 REV_GAP
3603 FREV_DELAY
3604 IACT_SLAVE
3605 DIFF_CURRENT
3606 DIFF_CURR_DELAY
3607 INHIB_Logic
3608 IREF0_Logic
3609 Bridge_Logic
3610 Reverse.Logic
3611 [X18:09]
3612 [X18:10]
3613 [X18:11]
3614 [X18:12]
3615 ADJ_REF1
3616 BC-Logic
3701-Par. f. appl. func. blocks
3801-Par. f. appl. func. blocks
3901-Par. f. appl. func. blocks
4001 FIELDBUS_PAR.1
4002 FIELDBUS_PAR.2
4003 FIELDBUS_PAR.3
4004 FIELDBUS_PAR.4
4005 FIELDBUS_PAR.5
4006 FIELDBUS_PAR.6
4007 FIELDBUS_PAR.7
4008 FIELDBUS_PAR.8
4009 FIELDBUS_PAR.9
4010 FIELDBUS_PAR.10
4011 FIELDBUS_PAR.11
4012 FIELDBUS_PAR.12
4013 FIELDBUS_PAR.13
4014 FIELDBUS_PAR.14
4015 FIELDBUS_PAR.15
Lista dei segnali
No.
10101
10102
10103
10104
10105
10106
10107
10108
10109
10110
10111
10112
10113
10114
10115
10116
10117
10118
10119
10120
10121
10122
10123
10124
10125
10126
10127
10301
10302
10303
10304
10305
10401
10402
10403
10404
10405
10501
10502
10503
10504
10505
10506
10507
10508
10509
10510
10511
10512
10513
10514
10515
10601
10701
10702
10703
10704
10705
10706
10707
10708
10709
10710
10711
10712
10713
10714
10715
10716
10717
10718
10719
10720
10721
10722
10723
10724
10725
10726
10727
10728
10729
Parameter name
AITAC:OUT+
AITAC:OUTAITAC:ERR
AI1:OUT+
AI1:OUTAI1:ERR
AI2:OUT+
AI2:OUTAI2:ERR
AI3:OUT+
AI3:OUTAI3:ERR
AI4:OUT+
AI4:OUTAI4:ERR
AI5:OUT+
AI5:OUTAI5:ERR
AI6:OUT+
AI6:OUTAI6:ERR
DATASET1:OUT1
DATASET1:OUT2
DATASET1:OUT3
DATASET3:OUT1
DATASET3:OUT2
DATASET3:OUT3
TREF_OUT
TREF_ENABLE
DECEL_CMND
LIFT_BRAKE
BRAKE_RUN
ARM_ALPHA
ARM_DIR
CURR_REF_IN_LIM
CURR_DER_IN_LIM
ARM_CURR_REF
CONV_CURR_ACT
ARM_CURR_ACT
TORQUE_ACT
U_NET_ACT
U_ARM_ACT
EMF_ACT
BRIDGE_TEMP
U_NET_DC_NOM_V
I_CONV_A
I_TRIP_A
U_CONV_V
MAX_BR_TEMP
CONV_TYPE
QUADR_TYPE
LINE_FREQUENCY
DLOG_STATUS
DI1:O1
DI1:O2
DI2:O1
DI2:O2
DI3:O1
DI3:O2
DI4:O1
DI4:O2
DI5:O1
DI5:O2
DI6:O1
DI6:O2
DI7:O1
DI7:O2
DI8:O1
DI8:O2
DI9:O1
DI9:O2
DI10:O1
DI10:O2
DI11:O1
DI11:O2
DI12:O1
DI12:O2
DI13:O1
DI13:O2
DI14:O1
DI14:O2
DI15:O1
No.
Parameter name
10730 DI15:O2
10901 RDY_ON
10902 RDY_RUNNING
10903 RUNNING
10904 FAULT
10905 ALARM
10906 LOCAL
10907 EMESTOP_ACT
10908 FAN_ON
10909 FIELD_ON
10910 MAIN_CONT_ON
10911 TRIP_DC_BREAKER
10912 DYN_BRAKE_ON
10913 MOTOR_ACT
10914 AUTO-RECLOSING
10915 COMM_FAULT
10916 RUN_DCF
10917 RESET_DCF
11001 FLUX_REF1
11002 FLUX_REF_SUM
11003 F_CURR_REF
11101 FAULT_WORD_1
11102 FAULT_WORD_2
11103 FAULT_WORD_3
11104 ALARM_WORD_1
11105 ALARM_WORD_2
11106 ALARM_WORD_3
11107 LATEST_FAULT
11108 LATEST_ALARM
11109 OPERATING_HOURS
11201 COMMIS_STAT
11202 BACKUPSTOREMODE
11203 FEXC_STATUS
11204 TC_STATUS
11205 BC
11206 SQUARE_WAVE
11207 TEST_REF
11208 TEST_RELEASE
11209 TEST_REF_SEL
11210 FEXC1_CODE
11211 FEXC1_COM_STATUS
11212 FEXC1_COM_ERRORS
11213 FEXC2_CODE
11214 FEXC2_COM_STATUS
11215 FEXC2_COM_ERRORS
11216 CMT_COM_ERRORS
11217 CDI300_BAD_CHAR
11218 CNT_SW_VERSION
11219 CNT_BOOT_SW_VERSION
11220 FEXC1_SW_VERSION
11221 FEXC2_SW_VERSION
11222 PROGRAM_LOAD
11301 F1_CURR_REF
11302 F1_CURR_ACT
11303 REF_DCF
11401 MOT1_MEAS_TEMP
11402 MOT1_CALC_TEMP
11501 F2_CURR_REF
11502 F2_CURR_ACT
11601 MOT2_MEAS_TEMP
11602 MOT2_CALC_TEMP
11701 RAMP:OUT
11702 ACCELCOMP:OUT
11703 RAMP:SIGN
11801 SPEED_REFERENCE
11802 REF_SUM:OUT
11803 LOCAL_SPEED_REF
11901 CONST_REF:OUT
11902 CONST_REF:ACT
11903 REF_SEL:OUT
11904 SOFT_POT:OUT
11905 SOFT_POT:ACT
12001 ERR:OUT
12002 ERR:OUT_OF_WIN
12003 ERR:STEP_RESP
12004 SPC:OUT
12005 SPC:IN_LIM
12101 SPEED_ACT_EMF
12102 SPEED_ACT
12103 SPEED_ACT_FILT
3ADW000066R0904
DCS500 System description i i
12104 TACHO_PULSES
12201 MIN_SPEED
No.
12202
12203
12204
12301
12302
12303
12304
12305
12306
12307
12308
12401
12402
12403
12404
12501
12502
12503
12504
12505
12506
12507
12508
12509
12510
12511
12512
12513
12514
12515
12516
12517
12518
12519
12520
12521
12522
12523
12524
12525
12526
12527
1260112699
1270112799
1280112899
1290112999
1300113013
13501
13502
13503
13601
13602
13603
13604
13605
13606
13607
13608
13609
13610
13611
13612
13613
13614
13615
13616
13617
13618
13619
13620
13621
13622
1380113819
1390113912
3ADW000066R0904 DCS500 System description i i
Parameter name
SPEED_GT_L1
SPEED_GT_L2
OVERSPEED
SPC_TORQMAX1
SPC_TORQMIN1
TREF_TORQMAX1
TREF_TORQMIN1
TORQMAX2
TORQMIN2
CURR_LIM_P
CURR_LIM_N
SEL1:OUT
SEL2:OUT
SEL2:TORQ/SPEED
SEL2:IN_LIM
CONSTANT
0
CONSTANT
-1
CONSTANT
1
CONSTANT
2
CONSTANT
10
CONSTANT
100
CONSTANT 1000
CONSTANT 31416
EMF:
100%
TORQ:
100%
TORQ
-100%
CUR,FLX,VLT 100%
CUR,FLX,VLT -100%
SPEED:
100%
SPEED: -100%
SIG1(SPEED REF)
SIG2(SPEED STEP)
SIG3(TORQ. REF A)
SIG4(TORQ. REF B)
SIG5(TORQUE STEP)
SIG6(LOAD SHARE)
SIG7(FLUX REF)
SIG8(EMF REF)
SIG9(FORCE FWD)
SIG10(FORCE REV)
SIG11(CURR. REF)
SIG12(CURR. STEP)
Signals for application function blocks
Signals for application function blocks
Signals for application function blocks
Signals for application function blocks
Signals for application function blocks
STATUS_WORD
LTIME
LDATE
Conv.Curr.Slave
Arm.Curr.Slave
Conv.Curr.Both
Arm.CURR.Both
Curr.-Ref.1
IREF1-Polarity
IREF1-Pol.Master
Curr.-Ref.2
IREF2-Polarity
IREF2-Pol.Broth.
Bridge
Bridge of Slave
Indicat.Revers.
Fault Reversion
Fault Current
Logik f.INHIBIT
Input X18:13
Input X18:14
Input X18:15
Input X18:16
BC not Zero
Reserved f.Commun
Function for application winder
II D 4-13
Function for application winder
L'azionamento in modulo per applicazioni standard
● Alimentatore di campo integrato (max. 20 A)
● Contollo accurato di coppia e velocità
● Design estremamente piccolo e compatto
● Installazione e messa in servizio molto facile
● Consegna rapida
● Gamma di potenza: 10...500 kW
DCS 500B / DCS 600
L'azionamento in modulo per applicazioni
complesse
● Libera programmazione del software
● Configurazione a 6 e 12 impulsi fino a 10 MW
e oltre
● Display con messaggi chiari
● Gamma di potenza: 10...5000 kW
DCE 500 / DCE 600
Pannello altamente integrato
● Eccellente soluzione per upgrade o revamp
● Contiene:
●
Modulo DCS 500B / DCS 600
●
Trasformatore ausiliario
●
Avviamento ventilatore del motore con
protezione
●
Contattore principale
●
Contattore principale
● Gamma di potenza: 10...130 KW
DCS 400 / DCS 500
Easy Drive
La soluzione completa in quadro standard
● Pre-ingegnerizzato
● Installazione e messa in servizio facile
● Classe di protezione: IP21
● Display con messaggi chiari
● Consegna rapida
● Gamma di potenza: 50...1350 kW
DCA 500 / DCA 600
Per applicazioni complesse, System Drive
completamente ingegnerizzato in quadro
● Struttura hardware flessibile e modulare
● Configurazione a 6 e 12 impulsi fino a 18 MW
e oltre
● Applicazioni pre-programmate per:
Metallurgia, Sollevamenti, Cartiere, Industria
mineraria
● Gamma di potenza: 10...18000 kW
ABB Automation Products GmbH
Postfach 1180
68619 Lampertheim • GERMANY
Telefon +49(0) 62 06 5 03-0
Telefax +49(0) 62 06 5 03-6 09
www.abb.com/dc
II D 4-14
Essendo sempre impegnati a soddisfare i requisiti della
tecnologia più avanzata con i nostri prodotti, ci riserviamo
il diritto di apportare modifiche ai dati (dati di progetto,
figure, dati dimensionali, pesi, ecc.) delle nostre
apparecchiature riportati nella presente brochure.
3ADW 000 066 R0904 REV I
09_2005
DCS 400
*066R0904A5360000*
3ADW000066R0904 DCS500 System description i i
*066R0904A5360000*
Morsetto
SDCS-CON-2
SP -20
SP -90
Riferimento
velocitá
6 5
X3:
P1
1
P2
20000
AI1
10104
AI1:OUT+
10105
AI1:OUT10106
AI1:ERR
104 AI1 CONV MODE
105 AI1 HIGH VALUE
P3
-20000
106 AI1 LOW VALUE
+
--
DI8 (10715)
OUT
11903
(11803)
1912 IN2
1913 SEL2
1914 IN3
1915 SEL3 0
P10
1916 ADD
1917 REV
ST5
ST5
SP -77
CONST REF
1901 ACT1
1902 ACT2
1
1903 ACT3
ACT 11902
DRIVE LOGIC (903)
1904 ACT4
P2
1500
P3
0
P4
0
P5
0
P1
1000
1906 REF1
1907 REF2
Scelta riferimento
di velocitá
OUT 11901
1908 REF3
1909 REF4
1905 DEF
P1
200
P2
200
5000
P2
-5000
P3
100
P4
200
P5
100
P6
0
P7
0
P8
20000
P9
-20000
X5:
10
1
4 3
X3:
2 1
P1
0
P2
30000
P3
-30000
101
102
103
1712
1710
P11
0
P12
0
P1
15000
P2
2048
AITAC
10101
AITAC:OUT+
10102
AITAC:OUT10103
AITAC:ERR
2103
2101
SPEED SCALING
PULSE
TACHO
0
1
2
3
4
TACHOPULS NR
AITAC:OUT+
(10505)
(501)
EMF
TO
SPEED
CALC
U ARM ACT
U MOTN V
AITAC CONV MODE
AITAC HIGH VALUE
P3
5
AITAC LOW VALUE
ST5
P4
0
P5
500
2102
2104
2105
12104
TACHO PULSES
12102
SPEED ACT
T
DATA LOGGER
(601)
5
SPEED MEAS MODE
SPEED ACT FTR
SPEED ACT FLT FTR
T
SPEED ACT FILT
12103
T-
DECEL2
SPEEDMIN
1704 FOLLOW IN
1705 FOLL ACT
RUNNING
(11205)
BC
1718 ACC COMP.MODE
(OUT)
1719
ACC COMP.TRMIN
ST5
ACCELCOMP
50
P2
5000
P3
10000
P4
23000
P5
0
P6
50
P7
3000
P8
10
P9
200
P10
50
2201
2202
2203
2204
2205
2206
2207
2208
2209
2210
SPEED ACT
MIN SPEED L
MIN SPEED
SPEED L1
SPEED GT L1
SPEED L2
SPEED GT L2
OVERSPEEDLIMIT
OVERSPEED
11702
AI2
AI2:OUT+ 10107
AI2:OUT- 10108
12201
12202
12203
X3:
10 9
+
--
201
10000
P2
0
P3
20000
202
203
204
BRAKE CONTROL
(303)
CONSTANTS (12511)
CONSTANTS (12510)
CONSTANTS (12511)
P1
4000
P2
-4000
P3
16000
P4
100
P5
200
P6
4095
STALL.TORQUE
STALL.TIME
0
P2
2000
P3
-2000
AI3:OUT+ 10110
AI3:OUT- 10111
110
111
112
AI3 CONV MODE
AI3 HIGH VALUE
AI3 LOW VALUE
ST5
2302
2303
2304
2305
2306
MON.EMF V
Morsetto
AO1
SDCS-CON-2
IN
AO1 NOMINAL V
AO1 OFFSET V
0V
AO1
AO1 NOMINAL VALUE
P7
P8
P9
P10
2315
2316
2317
2307
2308
-4095
(12102)
2309
20000
2310
16383
2311
16383
2312
16383
2313
16383
2314
16383
(11001)
AI4
AI4:OUT+
2 1
X4:
AI4:OUT-
+
-0
-2000
P1
0
P2
0
P3
0
P4
0
P5
0
P7
500
P8
10
P9
30
P10
30
P11
0
P13
500
P14
2
114
115
AI4 HIGH VALUE
AI4 LOW VALUE
ST5
10113
P12
0
10114
P16
4
P17
1024
10115
Max
TREF TORQ MAX
Min
TREF TORQ MIN
Max
SPC TORQMAX1 12301
SPC TORQMIN1 12302
TREF TORQMAX112303
TREF TORQMIN1 12304
TORQ MAX2 12305
TORQ MAX
Min
TORQ MIN
Max
GEAR.START TORQ
GEAR.TORQ TIME
T
t
GEAR.TORQ RAMP
ARM CURR LIM P
CURR LIM P
Min
ARM CURR LIM N
Max
SPEED ACT
CURR LIM N
12308
x x y
y 4192
MAX CURR LIM SPD
ARM CURR LIM N1
12307
x x y
y 4192
I
ARM CURR LIM N2
ARM CURR LIM N3
ARM CURR LIM N4
ARM CURR LIM N5
n
FLUX REF1
SETTGS_3
517
518
519
520
521
SETTINGS
Conv. settings C4
SET I COMV A
Conv. values
10510
I TRIP A
10509
I CONV A
10511
U CONV V
10512
MAX BR TEMP
10513
CONV TYPE
10514
QUADR TYPE
10507
BRIDGE TEMP
SET U CONV V
SET MAX BR TEMP
SET CONV TYPE
SET QUADR TYPE
P18
0
P6
10
P19
10
P15
0
501
502
503
504
Motor Data
U MOTN V
Software version:
Schematics:
Library:
Dati di linea
I MOTN A
I MOT1 FIELDN A
S21.233
S21V2_0
DCS500_1.5
e di motore
I MOT2 FIELDN A
505 FEXC SEL
507
506
Supply Data
U SUPPLY
U NET ACT
PHASE SEQ CW
U NET DC NOM V
LINE FREQUENCY
Control Adjust.
523 CURR ACT FILT TC
524
PLL CONTROL
528 PLL DEV LIM
UDC
526 OFFSET UDC
513
EMF FILT TC
+
- CALC
Iact
525 UNI FILT TC
(only for Cur. Controlling)
522
LANGUAGE
ST20
1/8
DCS 500B Struttura software
CONV CUR ACT
ARM CUR ACT
TORQUE ACT
10504
DATA LOGGER (604)
10508
10515
10501
10502
DATA LOGGER (602)
MAINTENANCE (1211)
10503
U ARM ACT 10505
EMF ACT 10506
P1
5000
P2
0
P3
4095
DATA LOGGER (603)
MAINTENANCE (1212)
SP -80
AO2
205 IN
206 AO2 NOMINAL V
207 AO2 OFFSET V
208 AO2 NOMINAL VALUE
0V
AO2
X4:
2000
P3
AI4:ERR
AI4 CONV MODE
Min
SPC TORQ MIN
10 8
P2
113
TORQUE/CURRENT LIMITATION
SPC TORQ MAX
ST5
SP -87
Non utilizzato
P1
2301
MON.MEAS LEV
SP -81
P1
CONSTANTS (12510)
P13
SP -88
AI3:ERR 10112
P1
ST5
TORQ MIN2 12306
ST20
12101
DRIVE LOGIC
P12
SP -1
ST5
AI3
12003
STEP
12204
STALL.SPEED
12PULSE LOGIC (3604)
AI2 CONV MODE
108 AI2 HIGH VALUE
109
AI2 LOW VALUE
Non utilizzato
12002
TORQ REF HANDLING
STALL.SEL
X4:
-2000
STEP RESP
SP -10
SPMONI_2
SPEED MONITOR
10 7
8 7
X3:
2000
P3
OUT OF WIN
WIN SIZE
SET ALL RAMP
VALUES TO ZERO
AI2:ERR 10109
P2
WIN MODE
Regolatore
di velocitá
SMOOTH1
P11
SP -89
107
FRS
T+
DECEL1
ST5
0
12001
E-
1716
MAINTENANCE
(1210)
Calcolo retroazione di velocitá
P1
2002
OUT
SPEED ACT
ST5
ACCEL2
(10903)
P1
T5
+
--
2004
FREE SIGNALS
(12517)
H
ACCEL1
SP -12
SPEED ACT EMF
Riferimento
di coppia
2003
0
P2
1713 SMOOTH2
1715 SPEEDMAX
SPEED MEASUREMENT
CH B
-8...-30V
-30...-90V
-90...-270V
1709
SP -11
CH A
SP -84
0
2005
0
P1
SP -17
REFSUM_2
1801
IN1
OUT 11802
1802 IN2
SPEED ERROR
IN
RUNNING
T20
Encoder incrementale
+
S
1707 T1/T2
1714 EMESTOP RAMP
1711
OUT 11701
2021
1923 ENABLE
1921 OHL
1922 OLL
(10903)
Tachimetrica
Tacho
LOC REF
1708
SP -13
2001
SPEED
11801
REFERENCE
11703
SIGN
1706 RES OUT
SP -15 SOFTPOT1
SOFTPOT
1918 INCR
OUT 11904
1919 DECR
ACT 11905
1920 FOLLOW
P1
RAMP GENERATOR
(10906)
LOCAL
0
1702 RES IN
1717
STARTSEL
0
1703 HOLD
ST5
DRIVE LOGIC (10903)
RAMP_3
SP -18
1720 SPEED SET
1701 IN
REF SEL
1910 IN1
1911 SEL1
ST5
2/8
1/8
2/8
3/8
SP -9
SP -14
2006
TORQ REF
HANDLING (12403)
TORQ REF
HANDLING (12402)
2009
2010
2011
2012
2007
OUT
BAL
SET1
BALREF
VAL1
BAL2
SET2
BAL2REF
VAL2
HOLD
HOLD
RINT
CLEAR
IN LIM
12004
2407
12005
2408
P1
P2
P3
P4
P5
P6
P7
P8
2
SP ERR
CURRENT CONTROL
SEL2:TORQ/SPEED
SEL2:OUT
SEL2:IN_LIM
12403
12402
SPEED CONTROL
(2010)
12404
401
SPEED CONTROL (2011)
3
CONSTANTS (12526)
CONSTANTS (12527)
4
(11702)
FREE SIGNALS (12520)
1
P1
2409
2406
ACCELCOMP
SEL2.TORQ STEP
SEL2.TREF SEL
P1
0
P2
1366
TORQ MAX2
RUNNING
TORQ MIN2
SET OUT TO ZERO
P3
300
P4
3200
KPSMIN
P5
2050
KPSPOINT
P6
150
KPSWEAKFILT
P7
15
P8
0
P9
0
TD
P10
0
TF
P11
40
BC
FLUX N
ARM CUR ACT
TORQ REF
12-PULS
[1209] 1,2
FLUX REF1
402
403
404
(10903)
KP
KI
RUNNING
ST5
-1
SET OUTPUTS TO ZERO
Torque ref
DROOPING
405
ARM CURR REF
CURR REF IN LIM
CURR DER IN LIM
ARM DIR
CURR REF
CURR STEP
ARM ALPHA
BLOCK
10405
10403
10404
10402
10401
DATA LOGGER (606)
t
5
SPC TORQMIN1
(11205)
2014
500
2015
0
2016
0
2017
500
2018
5000
2013
0
2019
0
2020
50
SEL2.TREF EXT
Max
(12001)
0
1
Min
SPC TORQMAX1
(10903)
0
SEL2.TREF SPC
C_CNTR_3
SP -75
TORQ REF HANDLING
KP
DROOPING
2008
TREFHND2
SPEED CONTROL
IN
REF TYPE SEL
406
ARM CURR REF SLOPE
415 ARM CURR LIM P
416 ARM CURR LIM N
407
408
409
ARM CURR PI KP
ARM CURR PI KI
ARM CONT CURR LIM
412
ARM ALPHA LIM MAX
413 ARM ALPHA LIM MIN
414 DXN
410 ARM L
411
ARM R
417 ARM CURR CLAMP
Regolatore corrente
d'armatura
STSYN
ST5
DCFMOD
SP -105
C_MONIT
SP -104
DCF FIELDMODE
P1
0
1215
DCF MODE :
0
1
2
SP -8
TORQ REF SELECTION
2401
FREE SIGNALS (12521)
FREE SIGNALS (12519)
P1
0
P2
0
2403
2404
2402
2405
1 2
TREF A
SEL1:OUT
LOAD SHARE
:
:
:
:
3
:
4
:
5
6 :
45 6
12401
TREF B
TREF A FTC
TREF B SLOPE
2
TREF TORQMAX1
DI2 (10703)
45 6
1216 DI/OVP
Disabled
DCF Current Control
Stand Alone
Reserved
Fexlink Node 1
Fexlink Node 2
MG Set
P1
P2
7
Cur.Controller for high inductive load
... 407 x8
ARM_CURR_PI_KP
ARM_CURR_PI_KI
... 408 x8
ARM_CONT_CUR_LIM
0 409
3601
REV_DELAY
15
3602
REV_GAP
15
3603
FREV_DELAY
15
P3
0
P4
0
(10903)
RUNNING
ST5
SETS SEL1:OUT TO ZERO
-1
P2
0
OVP SELECT
EMFCONT2
SP -34
EMF CONTROL
P11
0
1001
FIELD MODE
(10907)
EMESTOP ACT
1004
FLUX REF SEL
1002
CONSTANTS (12512)
FLUX REF
(12102)
SPEED ACT
P2
P13
P14
20000
23100
0
1001=1,3,5
P1
100%
FLUX REF 1
100%
1012 FIELD WEAK POINT
1017 GENER.WEAK POINT
1018 FIELD WEAK DELAY
FLUX REF SUM
cal
generatoric
DRIVE MODE 1201=10
(1201)
EMESTOP ACT
TRef2
(10907)
1005 EMF REF SEL
&
1003 EMF REF
CONSTANTS (12509)
P1
P12
P3
P4
1006
100
1016
160
(10506)
1007
150
1008
4905
50
P5
P6
410
P7
-4095
P8
P9
1187
P10
2190
3255
F CURR REF
11001
P2
11002
11003
P3
P10
P4
P5
P6
P7
P8
P9
0
40 70 90
LOCAL EMF REF
GENER.EMF REF
EMF ACT
EMF KP
EMF KI
1011 EMF REL LEV
1009 EMF REG LIM P
1010 EMF REG LIM N
1013 FIELD CONST 1
1305
1321
1306
1307
1308
1309
1311
1312
F1 CURR GT MIN L
F1 CURR MIN TD
F1 OVERCURR L
F1 CURR TC
F1 KP
F1 KI
F1 U LIM N
F1 U LIM P
420
419
Monit. 1
method 2
CUR RIPPLE LIM
CUR RIPPLE MONIT
ZERO CUR DETECT
INTERNAL
0
1
0
1
2
3
A137
F34
A137
F34
CURRENT ZERO
SIGNAL
RESET DCF
10916
10917
11303
Fexlink as Transmitter
for FEX1 and FEX2
SP -30
MOTOR 1 FIELD
FANS ON
(10908)
DRIVE MODE 1201=7
(1201)
1313 F1 RED.SEL
0
FIELD MODE 1001=1,3,5
(1001)
1301 F1 REF
100%
1314 F1 SEL.REF
1228
TEST REF2
1302 F1 FORCE FWD
0%
1303 F1 FORCE REV
1304 F1 ACK
2047
200
4710
0
1
20
-4096
4096
421
STSYN
REF DCF
6
F03
DriveLogic
EXTERNAL
via Options
RUN DCF
from ext. FEXLINK
Limitazione di coppia/corrente
CURRENT
RISE MAX
BC
A121
F 21
as FEX 1 (Receiver)
as FEX 2 (Receiver)
5
418
Iact
0
1
4
32767
Input for external Overvoltg.Protection
TREF TORQMIN1
1217
CURRENT MONITOR
SDCS-FEX-2
or
DCF503/504
or
P1
F1 CURR REF
M2FIELD2
SP -28
M1FIELD2
(10908)
FANS ON
(1201)
DRIVE MODE 1201=7
1510
F2 RED.SEL
0
CONSTANTS (12512)
11301
P2
1228
1501 F2 REF
1511 F2 SEL.REF
MOTOR 2 FIELD
100%
TEST REF2
F1 CURR ACT
11302
DATA LOGGER
(605)
DCF501/502
P3
P4
P5
P6
P7
P8
P9
2047
4710
0
1
20
-4096
4096
1502
1503
1504
1505
1506
1508
1509
F2 CURR GT MIN L
F2 OVERCURR L
F2 CURR TC
F2 KP
F2 KI
F2 U LIM N
F2 U LIM P
F2 CURR REF
11501
0%
SDCS-FEX-2
or
DCF503/504
or
DCF501/502
F2 CURR ACT 11502
ST20
ST20
SP -26
SP -24
MOTOR 1 FIELD OPTIONS
Regolatore di tensione motore
P1
10
P4
100
MOTOR 2 FIELD OPTIONS
1310 F1 U AC DIFF MAX FREE WHEELING
P1
10
1507
F2 U AC DIFF MAX FREE WHEELING
ST20
1014 FIELD CONST 2
1015 FIELD CONST 3
ST10
P5
614
P6
200
P7
80
P8
80
P9
0
1315
1316
1317
1318
1319
1320
OPTI.REF GAIN
OPTI.REF MIN L
OPTITORQUE
OPTI.REF MIN TD
REV.REV HYST
REV.REF HYST
Regolatore corrente di campo 1 e 2
FIELD REVERSAL
REV.FLUX TD
ST20
2/8
1/8
3/8
4/8
3/8
1/8
4/8
5/8
Morsetto
Morsetto
SDCS-CON-2
SDCS-CON-2
SP -63
DI7
SP-36
10716
REF SEL (1911)
BRAKE CONTROL (302)
ST5
905
5
O1
O2
906
10709
6
O2
10711
908
10712
909
910
911
1
O2
912
10701
913
10702
ST5
O1
2
O2
10703
10704
DCF FIELDMODE
(1216)
ST5
SP -67
DI3
10705
10706
P1
0
P2
1
P3
0
P4
0
P5
0
P6
0
P7
0
P8
2
914
915
916
917
918
919
920
921
RESET
START INHIBIT
DISABLE LOCAL
FAN ON 10908
ACK CONV FAN
ACK MOTOR FAN
MAIN CONT ON 10910
MOTOR ACT 10913
ACK MAIN CONT
MOTOR2
TRIP DC BREAKER 10911
FIELD HEAT SEL
DYN BRAKE ON 10912
MAIN CONT MODE
EME STOP MODE
PANEL DISC MODE
PWR LOSS MODE
AUTO-RECLOSING 10914
COMFAULT MODE
COMM FAULT 10915
1
P7
358
P8
358
T20
P9
0
SP -47
DO3
805
IN
806
INV IN
T20
P10
1
10707
813
814
10708
Ingressi digitali
aggiutivi
X1:
1
Non utilizzato
SP-61
DI9
O1
O2
X1:
2
Non utilizzato
ST5
SP-60
DI10
SP -91
DATASET 1
10717
10122
OUT1
10123
OUT2
10124
OUT3
10718
IN
O2
X1:
DI11
3
O1
O2
10719
10720
10721
10722
ST5
SP-58
SP -93
DATASET 3
DI12
4
X1:
Non utilizzato
O1
O2
INV IN
6
X1:
O1
O2
1207
1208
1209
1213
1210
1211
1212
1214
0
4
ARM. CONTROLLER
POT1 VALUE
1
7
FIRST FIELD EXCITER
POT2 VALUE
2
8
SECOND FIELD EXCITER
PERIOD
t
BTW.POT1/2
3
9
4
10
0
TEST REF
SQUARE WAVE
DRIVE ID
WRITE ENABLE KEY
WRITE ENABLE PIN
SELECT OPER.SYST
ACTUAL VALUE 1
DI14
7
X1:
O1
O2
MACRO SELECT
T5
INV IN
T20
SP-95
FLBSET_2
FIELDBUS
4001
FIELDBUS PAR.1
4002
(MODULE TYPE)
4003
4004
4005
4006
4007
4008
4009
4010
Parameters
4011
depends of
modul type
4012
4013
4014
4015
SP -92
DATASET 2
209
IN1
210
IN2
211
IN3
ST5
OUT
Monitoraggio
SP -94
DATASET 4
212 IN1
213 IN2
214 IN3
ST5
ST5
SP -76
P2
230
P3
80
P4
60
10725
P5
5000
10726
P6
0
P7
4
P8
10
P9
0
IN
OUT
Ingressi e uscite per 12 impulsi
10727
10728
DI15
8
X1:
O1
13617
X18:13
13618
X18:14
13619
X18:15
13620
X18:16
10730
ST5
AI5
AI5:OUT+
3610 Revers.Logic
2 1
X2:
AI5:OUT-
+
--
AI5:ERR
0
116 AI5 CONV MODE
P2
2000
117 AI5 HIGH VALUE
P3
-2000
118 AI5 LOW VALUE
P1
P1
P2
P3
10116
10117
1
10
10
10118
3601
REV DELAY
3602
REV GAP
3603
FREV DELAY
ON/OFF LOGIC
3607 INHIB Logic
Non utilizzato
5 4
X2:
+
-P1
P2
P3
SP -85
AI6
P4
P5
2000
120 AI6 HIGH VALUE
-2000
121 AI6 LOW VALUE
3605 DIFF CURRENT
3606 DIFF CURR DELAY
CURRENT REFERENCE
P6
2048
AI2 (10107)
ST5
4/8
10
150
AI6:ERR 10121
119 AI6 CONV MODE
BC not Zero
CURRENT ANALYSIS
active, if [1209] = 1
AI6:OUT+ 10119
AI6:OUT- 10120
0
Logic f. INHIBIT
(11205)
BC
3616 BC Logic
ST5
3615
ADJ REF1
3604 IACT SLAVE
MASTER
6-PULSE
3611
3612
3613
3614
13611
Bridge
13606
IREF1-Polarity
13609
IREF2-Polarity
13607
IREF1-Pol.Master
13610
IREF2-Pol.Broth
13612
Bridge of Slave
13613
Indicat.Revers
13614
Fault Reversion
3608 IREF0 Logic
3609 Bridge Logic
STSYN
SP -86
SP -98
OUTPUT X18
12-PULSE LOGIC
BRIDGE REVERSAL LOGIC
active, if [1209]= 1 or 2
INPUT X18
10729
12PULS_2
SP -99
SP -97
O2
Non utilizzato
511
512
508
509
510
514
515
516
527
CONPROT2
CONVERTER PROTECTION
ARM OVERVOLT LEV
ARM OVERCURR LEV
U NET MIN1
U NET MIN2
PWR DOWN TIME
EARTH.CURR SEL
EARTH.FLT LEV
EARTH.FLT DLY
CONV TEMP DELAY
ST20
SP -22
ST5
SP-55
Non utilizzato
CDP312
ACTUAL VALUE 3
ST5
SP-56
Non utilizzato
DRIVE LOGIC
RAMP GENERATOR
12 PULSE LOGIC
11203
FEXC STATUS
11210
FEXC1 CODE
11220 FEXC1 SW VERSION
11211
FEXC1 COM STATUS
FEXC1 COM ERRORS 11212
11213
FEXC2 CODE
11221 FEXC2 SW VERSION
FEXC2 COM STATUS 11214
11215
FEXC2 COM ERRORS
FIELDBUS NODE ADDR
ACTUAL VALUE 2
11206
11204
TC STATUS
11201 COMMIS STAT
11205
BC
11202 BACKUPSTOREMODE
11222 PROGRAM LOAD
11216
11218 CNT SW VERSION CMT COM ERRORS
11217
11219 CNT BOOT SW VER CDI300 BAD CHAR
CMT DCS500 ADDR
110
10724
SPEED LOOP
EMF CONTROLLER
Manutenzione
SP -43
DO7
IN
ST5
DI13
0
1203
TEST REF SEL
P1
ST5
SP-57
Non utilizzato
10125
OUT1
10126
OUT2
10127
OUT3
10723
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
P01
P02
P03
P04
P05
P06
P07
P08
P09
P10
P11
P12
P13
P14
P15
ST5
O1
P11
1202
RELEASE OF ARM.
CONTROLLING
Ingressi e uscite per fieldbus
ST5
SP-59
Non utilizzato
SETTINGS (10505)
SP -44
DO6
IN
1206
&
I1=I2
7
Must be connected, when no fan acknowledges (DI1, DI2)
SPEED MESUREMENT (12103)
SETTINGS (10501)
MAIN CONT
Relay output
SDCS-POW-1
1205
4
X7:
4
X6:
O1
O2
Morsetto
MAIN CONT
T20
ST5
SDCS-IOE-1
EXC CONT
1204
(11207)
P6
ST5
SP -66
DI4
100
SP -48
DO2
803
IN
804
INV IN
812
T20
0
P4
250
811
COMFLT. TIMEOUT
P3
P5
SP -42
DO8
815
IN
816
INV IN
T20
STOP MODE
FAN CONT
1000
T20
MOTOR 1/2 FIELD
FIELD ON 10909
(10906)
LOCAL
1201
DRIVEMODE
6
3
O2
MAINTENANCE
MANTUN_3
MAINTENANCE
TEST RELEASE
X7:
X6:
MAIN CONT
O1
LOCAL 10906
1 2
X6:
MOTOR FAN
EME STOP
SP -49
DO1
801
IN
802
INV IN
0
(11209)
P2
X96:
SP -68
DI2
EMESTOP ACT 10907
RUNNING
3
O1
RAMP GENERATOR
TORQ REF SELECTION
TORQ REF HANDLING
ALARM 10905
COAST STOP
INV IN
T20
X7:
X6:
CONV FAN
FAULT 10904
RUN3
MIN SPEED
(12201)
BC (BLOCK.)
(11205)
907
ST5
SP -69
DI1
810
2
O1
RUNNING 10903
1
SP -45
DO5
IN
X7:
X6:
RESET
809
LOCAL
10710
ST5
SP -64
DI6
RUN2
RDY ON 10901
RDY RUNNING 10902
P1
1
X6:
EM STOP
904
RUN1
T20
DRLOGI_2
(11208)
X7:
SP -65
DI5
903
CONST REF (11902)
DRIVE LOGIC
ON/OFF
INV IN
SP -100
RDY RUNNING
5
8
O2
902
10715
SP -46
DO4
IN
X7:
X6:
RUN
901
O1
808
10714
ST5
SP -62
DI8
807
4
7
O2
Ingressi e uscite digitali (standard)
10713
X7:
X6:
ON/OFF
O1
*
2048
P1
0
X18:09
X18:10
X18:11
X18:12
P2
0
P3
0
STSYN
P4
4096
P5
120
P6
130
P7
240
13616
ST20
13621
SP -21
13601
Conv.Curr.Slave
13602
Arm.Curr.Slave
13603
Conv.Curr.Both
13604
Arm.CURR.Both
13615
Fault Current
[1209]
Curr.Ref.2
Curr.Ref.1
Res. f.Commun
13608
13605
13622
P1
0
P2
0
P3
0
P4
4096
P5
120
P6
130
P7
240
M2PROT_2
MOTOR 2 PROTECTION
1601
MOT2.TEMP IN
11601
1602
MOT2.TEMP ALARM L MOT2 MEAS TEMP
1603
MOT2.TEMP FAULT L
1604
11602
MODEL2.SEL
MOT2 CALC TEMP
1605
MODEL2.CURR
1606
MODEL2.ALARM L
1607
MODEL2.TRIP L
1608
MODEL2.TC
ST20
STSYN
5/8
M1PROT_2
MOTOR 1 PROTECTION
1401
MOT1.TEMP IN
1402
11401
MOT1.TEMP ALARM L MOT1 MEAS TEMP
1403
MOT1.TEMP FAULT L
1404
KLIXON IN
1405
11402
MODEL1.SEL
MOT1 CALC TEMP
1406
MODEL1.CURR
1407
MODEL1.ALARM L
1408
MODEL1.TRIP L
1409
MODEL1.TC
6/8
5/8
6/8
7/8
Scelta riferimento di velocità
SP -7
P1
0
"EXT. IND. 1"
P3
0
SP-102
1101 IN USER EVENT 1
1102
TYPE
1103 TEXT
1104
0
"EXT. IND. 2"
P3
0
SPEED MEASUREMENT (12102)
602
DLY
SETTINGS (10505)
603
ST20
SETTINGS (10504)
604
MOTOR 1 FIELD (11302)
605
CURRENT CONTROL (10401)
1105 IN USER EVENT 2
1106 TYPE
1107 TEXT
1108 DLY
P1
1
P2
20000
P3
200
P4
3
"EXT. IND. 3"
P3
0
606
607
608
609
610
611
SP -5
0
601
SETTINGS (10501)
ST20
P1
DATALOG
DATA LOGGER
SP -6
P1
Il riferimento di velocità per il generatore della funzione di rampa è generato dai blocchi REF
SEL, che possono essere utilizzati per selezionare il valore di riferimento necessario, il
blocco CONST REF, che genera un massimo di 4 valori di riferimento settabili a titolo permanente, il blocco SOFTPOT, che riproduce la funzione di un motopotenziometro unitamente al
blocco RAMP GENERATOR, oppure dal blocco AI1 (ingresso analogico 1).
Il blocco RAMP GENERATOR contiene un generatore della funzione di rampa con 2 rampe
di salita e di discesa, 2 valori di tempo per la curva a S, le condizioni di limitazione per i limiti
superiore e inferiore, la funzione di mantenimento e le funzioni di "inseguimento" del riferimento o della retroazione di velocità. Un segnale speciale è disponibile per il trattamento
dell'accelerazione e della decelerazione.
Il blocco REF SUM abilita l’uscita del generatore della funzione di rampa e un segnale definibile dall’utente da aggiungere.
612
1109 IN USER EVENT 3
1110
TYPE
1111 TEXT
613
IN1 Ch.1
IN2 Ch.2
IN3 Ch.3
IN4 Ch.4
IN5 Ch.5
IN6 Ch.6
DLOG.TRIGG COND
DLOG STATUS
DLOG.TRIGG VALUE
10601
CMT-TOOL
DLOG.TRIGG DELAY
TRIG
DLOG.SAMPL INT
DLOG.TRIG
0
DLOG.STOP
0
DLOG.RESTART
0
STOP
Calcolo retroazione di velocità
RESTART
Questa pagina mostra la routine di condizionamento per i valori di riferimento e di retroazione
della velocità. Il blocco AITAC viene utilizzato per leggere la retroazione di velocità da una
tachimetrica analogica Il blocco SPEED MEASUREMENT elabora i 3 possibili segnali di
retroazione: tachimetrica analogica, generatore di impulsi o tensione di uscita del convertitore
(SPEED_ACT_EMF) - in funzione del blocco EMF TO SPEED CALC (se 2102=5 , la funzione di indebolimento di campo non è disponibile). I parametri vengono utilizzati per
attivare le funzioni di livellamento, selezionare il valore di retroazione e, ove applicabile, per
settare la velocità massima. Questo parametro serve anche per scalare l'anello di controllo
della velocità.
Il blocco SPEED MONITOR contiene la funzione di monitoraggio della tachimetrica e di stallo
del motore e confronta un valore di retroazione di velocità selezionato con la velocità massima, la velocità minima e 2 soglie settabili.
Il blocco AO1 rappresenta un’uscita analogica scalabile.
TRIG
STOP
RESTART
T1ms
1112 DLY
ST20
SP -4
1113 IN
P1
0
"EXT. IND. 4"
P3
0
USER EVENT 4
1114
Registrazione eventi
TYPE
1115 TEXT
1116
DLY
Regolatore di velocità
ST20
Il risultato viene confrontato con la retroazione di velocità dal blocco SPEED
MEASUREMENT utilizzando il blocco SPEED ERROR e quindi trasferito al regolatore di
velocità. Questo blocco permette la valutazione della deviazione del sistema per mezzo di un
filtro. Inoltre, è possibile in questo ambito effettuare i settaggi necessari per il modo operativo
“Window”. Se la retroazione di velocità dell’azionamento compare all'interno di una finestra in
corrispondenza del valore di riferimento, il regolatore di velocità viene “bypassato” (se è stato
attivato il modo "Window”; l’azionamento è controllato attraverso un valore di riferimento di
coppia in corrispondenza del blocco TORQ REF HANDLING). Se la retroazione di velocità è
al di fuori della finestra, il regolatore di velocità viene attivato, riportando la velocità effettiva
dell’azionamento all'interno della finestra.
Il blocco SPEED CONTROL contiene il regolatore di velocità con i valori di P, I e DT1. Ai fini
della funzione di adattamento, riceve un’amplificazione P variabile.
SP -3
1117 IN
P1
0
"EXT. IND. 5"
P3
0
USER EVENT 5
1118
TYPE
1119 TEXT
1120
DLY
ST20
Segnali aggiuntivi
SP -2
1121 IN
P1
0
"EXT. IND. 6"
P3
0
1122
USER EVENT 6
TYPE
1123 TEXT
1124
DLY
Limitazione di coppia / corrente
SP -73
ST20
CONSTANTS
0
-1
Eventi utilizzatore
1
2
10
100
1000
31416
EMF:100%
TORQ:100%
TORQ:-100%
CUR,FLX,VLT: 100%
CUR,FLX,VLT:-100%
Controllo freno
SPEED: 100%
SPEED:-100%
12501
Il “riferimento di coppia” generato dal regolatore di velocità viene trasferito all’ingresso del
blocco CURRENT CONTROL tramite il blocco TORQ REF HANDLING, dove viene convertito
in un valore di riferimento di corrente e utilizzato per la regolazione della corrente. Il blocco
TORQUE/CURRENT LIMITATION viene utilizzato per generare i vari valori di riferimento e
le limitazioni; questo blocco contiene le seguenti funzioni: “limitazione di corrente in funzione
della velocità”, “compensazione gioco ingranaggi”, “generazione dei valori per la limitazione
della corrente statica” e “limitazione di coppia”. I valori delle varie limitazioni vengono anche
utilizzati in altri punti, ad esempio nei seguenti blocchi: SPEED CONTROL, TORQ REF
HANDLING, TORQ REF SELECTION e CURRENT CONTROL.
Il blocco AI2 (ingresso analogico 2) viene utilizzato per la lettura di un segnale analogico.
Il blocco TORQ REF SELECTION contiene una limitazione con aggiunta a monte di due
segnali, uno dei quali può essere instradato attraverso un generatore della funzione di rampa;
l'altra valutazione del segnale può essere modificata dinamicamente utilizzando un moltiplicatore.
Il blocco TORQ REF HANDLING determina il modo operativo dell'azionamento. Se si trova
nella posizione 1, significa che è attivato il modo di controllo della velocità, mentre se si trova
nella posizione 2, significa che è attivato il modo di controllo della coppia (senza controllo ad
anello chiuso poiché nell’unità non è disponibile una retroazione di coppia “pura”). In entrambi
i casi, il valore di riferimento necessario proviene dall’esterno. Le posizioni 3 e 4 sono una
combinazione delle prime due opzioni sopra indicate. Si osservi che, con la posizione 3, il
valore più basso tra il riferimento di coppia esterno e l’uscita del regolatore di velocità viene
trasferito al regolatore di corrente, mentre con la posizione 4 il valore preso in considerazione è il maggiore. La posizione 5 utilizza entrambi i segnali, e corrisponde al metodo di funzionamento del modo “Window”.
CONST_0
12502
CONST_M1_TRUE
12503
CONST_1
12504
CONST_2
12505
CONST_10
12506
CONST_100
12507
CONST_1000
12508
CONST_31416
12509
EMF_MAX
12510
TORQ_MAX
12511
TORQ_MAX_N
12512
CONST_4095
12513
CONST_M4095
12514
CONST_20000
12515
CONST_M20000
ST
SP -74
FREE SIGNALS
12516
SIG1(SPEED REF)
12517
SIG2(SPEED STEP)
12518
SIG3(TORQ. REF A)
12519
SIG4(TORQ. REF B)
12520
SIG5(TORQUE STEP)
12521
SIG6(LOAD SHARE)
12522
SIG7(FLUX REF)
12523
SIG8(EMF REF)
12524
SIG9(FORCE_FWD)
12525
SIG10(FORCE REV)
12526
SIG11(CURR. REF)
12527
SIG12(CURR._STEP)
SP -32
(10902)
(10503)
BRAKE CONTROL
RESET
TORQUE ACT
301 HOLD REF
DI8 (10715)
SPEED MONITOR (12201)
P1
0
P2
0
P3
0
P4
0
TREF OUT
10301
LOCAL
302 BR RELEASE TREF ENABLE 10302
303 MIN SP IND DECEL CMND 10303
10304
304 ACT BRAKE
LIFT BRAKE
10305
305
START DELAY BRAKE RUN
306
STOP DELAY
307
HOLD TORQ
308
EMESTOP BRAKE
ST20
SPEED_STEP
TORQ_REF_B
TORQ_STEP
Regolatore corrente d'armatura
LOAD_SHARE
Il blocco CURRENT CONTROL contiene il regolatore di corrente con il valore di P e I, più un
adattamento nel campo del flusso della corrente continua. Questo blocco contiene anche le
funzioni per la limitazione dell’aumento di corrente, la conversione del valore del riferimento
di coppia in un valore di riferimento di corrente per mezzo del punto di incrocio del campo, e
alcuni parametri che descrivono la rete di alimentazione e il circuito di carico.
Per le applicazioni con carico induttivo e performance dinamiche elevati si utilizza un hardware diverso per generare una corrente di segnale uguale a zero. Questo hardware viene selezionato dal blocco CURRENT MONITOR. Le funzioni di monitoraggio corrente possono a
questo punto essere adattate ai requisiti dell'applicazione. Ciò consente di assicurare una più
facile manipolazione e un grado più elevato di sicurezza per azionamenti ad prestazioni
elevate come, ad esempio, i banchi di prova.
La modalità DCF può essere attivata attraverso il blocco DCF FIELDMODE. In questa modalità si possono specificare le funzionalità. In base alla funzione selezionata, il regolatore di
corrente riceve una diversa caratteristica, viene monitorata la protezione da sovratensione
DCF 506 viene instradato il riferimento di corrente e di campo attraverso i morsetti X16:.
CUR_REF
CUR_STEP
ST
FLTHNDL
SP-103
FAULT HANDLING
FAULT WORD 1
FAULT WORD 2
FAULT WORD 3
LATEST FAULT
ALARM WORD 1
ALARM WORD 2
ALARM WORD 3
LATEST ALARM
OPERATING HOURS
11101
11102
11103
7/8
Regolatore corrente di campo 1 e 2
Poiché un convertitore di potenza DCS può controllare due unità di campo, alcuni dei blocchi
funzione sono duplicati. Questo significa che, a seconda della configurazione meccanica
degli azionamenti, si possono controllare due motori in parallelo o alternatamente. La configurazione della struttura del software può essere generata progettando in maniera appropriata i blocchi durante la routine di messa in funzione.
Il blocco MOTOR1 FIELD / MOTOR2 FIELD legge il valore di riferimento della corrente di
campo e tutti i valori specifici dell’unità di alimentazione di campo per trasferirli al convertitore
di potenza di campo attraverso un collegamento seriale interno; il convertitore di potenza di
campo viene scalato in funzione del rispettivo hardware, ed effettua la regolazione della
corrente di campo. La direzione della corrente di campo per il motore 1 può essere determinata utilizzando comandi binari, mentre per il motore 2 può essere generata nel corso
dell’applicazione a monte del blocco di interesse.
Il blocco MOTOR1 FIELD OPTIONS/MOTOR2 FIELD OPTIONS controlla la funzione di
libera circolazione in presenza della minima tensione di rete e la funzione di inversione della
corrente di campo con gli azionamenti dotati della funzione di inversione di campo (solo per il
motore 1). Nel caso degli azionamenti dotati della funzione di inversione di campo, è prevista
un’opzione per influire selettivamente sulla coppia del circuito di indotto e sulla riduzione e
l'aumento della corrente di campo.
Ingressi e uscite digitali (standard)
Il blocco DRIVE LOGIC legge vari segnali dal sistema attraverso gli ingressi digitali DIx, li
elabora e genera dei comandi che vengono trasmessi al sistema attraverso le uscite digitali
DOx, ad esempio per il controllo del contattore di rete del convertitore di potenza, il contattore
del circuito di campo o i contattori di vari ventilatori, oppure per la trasmissione in uscita dei
messaggi di stato.
Ingressi digitali aggiuntivi
I blocchi AI3 e AI4 rappresentano altri 2 ingressi analogici non ancora assegnati ad alcuna
particolare funzione. I blocchi A15 e A16 rappresentano altri 2 ingressi aggiuntivi che sono
attivi soltanto se è collegata la scheda SDCS-IOE1. Con questo hardware aggiuntivo, si
rendono disponibili altri 7 ingressi digitali DI 9 .. DI15.
Ingressi e uscite per fieldbus
Se i segnali analogici e digitali non sono sufficienti per il controllo dell'azionamento, è necessario utilizzare un modulo bus di campo con riferimenti di comunicazione seriale (sono disponibili apparecchiature per l'installazione di Profibus, CS31, Modbus ecc.).Questo tipo di
modulo è attivato per mezzo del blocco FIELDBUS. I dati trasferiti dal controllo al convertitore
vengono memorizzati nei blocchi DATASET1 e DATASET3 come informazioni a 16 bit. A
seconda dell'applicazione, per trasmettere i messaggi, i pin di uscita di questi blocchi devono
essere collegati ai pin di ingresso di altri blocchi. La stessa procedura vale per i blocchi
DATASET2 e DATASET4, se collegati. Questi blocchi trasmettono le informazioni dal convertitore al sistema di controllo.
Ingressi e uscite per 12 impulsi
Il convertitore può essere configurato in un'applicazione parallela a 12 impulsi. In questo
caso, occorrono: due convertitori con indotto identici; un'unità di alimentazione di campo; una
reattanza T; cavo piatto di comunicazione collegato a X 18 dei due convertitori; La LOGICA A
12 IMPULSI deve essere attivata e garantisce il controllo sincrono dell'azionamento MASTER
e SLAVE.
Manutenzione
Il blocco MAINTENANCE fornisce valori di riferimento e condizioni di prova per consentire a
tutti i regolatori di essere tarati in base al convertitore di potenza. Se il pannello viene utilizzato come sistema di misura nello sportello dell'armadio possono essere definiti in questa
sede una serie di segnali.
Monitoraggio
Il blocco CONVERTER PROTECTION tiene sotto controllo il circuito d’indotto per individuare
condizioni di sovratensione e sovracorrente e controlla inoltre la rete per individuare condizioni di minima tensione. Costituisce un’opzione per leggere la corrente totale delle 3 fasi
attraverso un sensore esterno aggiuntivo e per tenere sotto controllo la condizione di "diverso
da zero". Vengono effettuati adattamenti per applicazioni di ricostruzione che mantengono la
sezione di potenza e il ventilatore al fine di identificare eventuali condizioni di sovraccarico e
guasti del ventilatore.
Il blocco MOTOR1 PROTECTION, nella sua parte superiore, valuta il segnale proveniente
dal sensore di temperatura analogico o da un Klixon. Nella parte inferiore calcola invece il
surriscaldamento del motore con l'ausilio del valore di retroazione della corrente e di un
modello del motore, dopodiché trasmette un messaggio in uscita.
Il blocco MOTOR2 PROTECTION funziona nello stesso modo del blocco MOTOR1
PROTECTION, ma senza valutazione Klixon.
Eventi utilizzatore
Usando il blocco USER EVENT1 fino a USER EVENT6 vengono creati sei differenti messaggi, che sono visualizzati come guasti o allarmi sul pannello CDP312 come pure sul display a
7 segmenti del convertitore
Controllo freno
Il blocco BRAKE CONTROL genera tutti i segnali necessari per il controllo di un freno meccanico.
11107
Dati di linea e di motore
11104
11105
11106
11108
Il blocco DATA LOGGER è in grado di registrare un massimo di sei segnali. I valori di questi
segnali vengono memorizzati in una RAM con buffer a batterie e restano quindi disponibili
anche in caso di mancanza della tensione di alimentazione. Il tempo di registrazione può
dipendere da un segnale di scatto, oltre che dal numero dei valori registrati prima e dopo il
segnale di scatto. La funzione DATA LOGGER può essere settata sia con il pannello sia con
un tool per PC. Per la valutazione dei valori registrati è consigliabile utilizzare un tool per PC.
Regolatore di tensione motore
Segnali aggiuntivi
Il blocco EMF CONTROL contiene il regolatore della tensione del circuito d’indotto (regolatore EMF). Si basa su una struttura parallela comprendente un regolatore PI e una funzione di
pre-controllo, generata con una caratteristica 1/x. Il rapporto fra i due percorsi può essere
settato. La variabile di uscita di questo blocco è il valore di riferimento della corrente di campo, che viene prodotto dal valore di riferimento di flusso mediante un’altra funzione caratteristica utilizzando la linearizzazione. Per consentire all'azionamento di utilizzare una tensione
8/8
Registrazione eventi
Il blocco SETTINGS serve per l'adattamento di tutti i segnali importanti come la tensione di
rete la tensione e la corrente del motore e la corrente di campo. Sono disponibili parametri
per regolare il controllo in condizioni speciali come reti deboli o interazioni con sistemi di filtri
di armoniche. Si può selezionare la lingua desiderata per la visualizzazione delle informazioni
sul display della pulsantiera di controllo.
Il blocco AO2 rappresenta un'uscita analogica scalabile.
11109
T20
6/8
motore superiore anche con sistemi a 4 quadranti è possibile impostare mediante i parametri
due diversi punti di indebolimento di campo.
7/8
Utilizzando il blocco FAULT HANDLING i guasti e gli allarmi dell'azionamento vengono raggruppati come informazione a 16-bit. I blocchi CONSTANTS e FREE SIGNALS possono
essere utilizzati per impostare limiti o particolari condizioni di prova.
8/8
Morsetto
SDCS-CON-2
SP -20
SP -90
Riferimento
velocitá
6 5
X3:
P1
1
P2
20000
AI1
10104
AI1:OUT+
10105
AI1:OUT10106
AI1:ERR
104 AI1 CONV MODE
105 AI1 HIGH VALUE
P3
-20000
106 AI1 LOW VALUE
+
--
DI8 (10715)
OUT
11903
(11803)
1912 IN2
1913 SEL2
1914 IN3
1915 SEL3 0
P10
ST5
SP -77
CONST REF
1901 ACT1
1902 ACT2
1
1903 ACT3
ACT 11902
DRIVE LOGIC (903)
1904 ACT4
P2
1500
P3
0
P4
1906 REF1
1907 REF2
Scelta riferimento
di velocitá
OUT 11901
1908 REF3
1909 REF4
0
P5
0
P1
1000
1905 DEF
P1
200
P2
200
P3
100
P4
200
P5
100
P6
0
P7
0
P8
20000
P9
-20000
SP -15 SOFTPOT1
SOFTPOT
1918 INCR
OUT 11904
1919 DECR
ACT 11905
1920 FOLLOW
P2
-5000
S
0
0
P2
2002
FREE SIGNALS
(12517)
FRS
WIN MODE
OUT OF WIN
WIN SIZE
STEP RESP
12003
STEP
ST5
P11
0
P12
0
2008
TORQ REF
HANDLING (12403)
TORQ REF
HANDLING (12402)
(10903)
T-
DECEL2
Regolatore
di velocitá
SMOOTH1
1716
SPEEDMIN
1704 FOLLOW IN
1705 FOLL ACT
(10903)
RUNNING
(11205)
BC
(11205)
2014
500
2015
0
2016
0
2017
500
2018
5000
2013
0
2019
0
2020
50
P1
P2
P3
P4
P5
P6
P7
SET ALL RAMP
VALUES TO ZERO
1718 ACC COMP.MODE
(OUT)
1719
ACC COMP.TRMIN
ST5
P8
ACCELCOMP
SP -12
SPEED MEASUREMENT
X5:
10
1
4 3
X3:
2 1
P2
30000
P3
-30000
103
P2
15000
2048
AITAC
10101
AITAC:OUT+
10102
AITAC:OUT10103
AITAC:ERR
2103
2101
PULSE
TACHO
SPEED SCALING
0
1
2
3
4
TACHOPULS NR
AITAC:OUT+
(10505)
(501)
AITAC HIGH VALUE
P3
5
AITAC LOW VALUE
ST5
P4
0
P5
500
2102
2104
2105
12104
TACHO PULSES
EMF
TO
SPEED
CALC
U ARM ACT
U MOTN V
P1
DATA LOGGER
(601)
5
SPEED MEAS MODE
SPEED ACT FTR
SPEED ACT FLT FTR
T
SPEED ACT FILT
12103
50
P2
5000
P3
10000
P4
12102
SPEED ACT
T
SPEED ACT EMF
23000
P5
0
P6
50
P7
3000
P8
10
P9
200
P10
50
2201
2202
2203
2204
2205
2206
2207
2208
2209
2210
SPEED ACT
MIN SPEED
SPEED L1
SPEED GT L1
SPEED L2
SPEED GT L2
OVERSPEEDLIMIT
OVERSPEED
12201
12202
DRIVE LOGIC
CONSTANTS (12510)
BRAKE CONTROL
(303)
CONSTANTS (12511)
CONSTANTS (12510)
12203
CONSTANTS (12511)
STALL.SPEED
P1
STALL.TIME
P2
P2
0
P3
20000
-4000
MON.EMF V
Morsetto
AO1
SDCS-CON-2
IN
202
AO1 NOMINAL V
203
0V
AO1
AO1 OFFSET V
204
P3
16000
P4
100
P5
200
P6
4095
P8
AO1 NOMINAL VALUE
P9
P10
P12
12PULSE LOGIC (3604)
8 7
X3:
AI2
AI2:OUT+ 10107
AI2:OUT- 10108
2301
2302
2303
2304
2305
2306
2315
2316
2317
2307
2308
-4095
(12102)
2309
20000
2310
16383
2311
16383
2312
16383
2313
16383
2314
16383
P7
X4:
SP -89
P13
(11001)
AI2:ERR 10109
P2
2000
P3
-2000
107
ST5
X3:
10 9
+
-0
P2
2000
P3
-2000
AI3:OUT+ 10110
AI3:OUT- 10111
110
111
112
2 1
X4:
113
0
0
P4
0
P5
0
114
115
AI4:ERR
30
P10
30
P11
0
P13
500
P14
2
10113
P12
0
10114
P16
4
P17
1024
P18
0
P6
10
P19
10
P15
0
10115
AI4 CONV MODE
AI4 HIGH VALUE
AI4 LOW VALUE
ST5
SETTINGS
Conv. settings C4
Conv. values
10510
517
SET I COMV A
I TRIP A
518
10509
SET U CONV V
I CONV A
519
10511
SET MAX BR TEMP
U CONV V
10512
520
SET CONV TYPE
MAX BR TEMP
521
10513
SET QUADR TYPE
CONV TYPE
10514
QUADR TYPE
10507
BRIDGE TEMP
Motor Data
501
U MOTN V
502
I MOTN A
503
I MOT1 FIELDN A
504
I MOT2 FIELDN A
505 FEXC SEL
507
506
Dati di linea
Supply Data
U SUPPLY
U NET ACT
U NET DC NOM V
PHASE SEQ CW
LINE FREQUENCY
UDC
526 OFFSET UDC
513
CONV CUR ACT
ARM CUR ACT
TORQUE ACT
EMF FILT TC
10504
10501
10502
EMF ACT 10506
P1
5000
P2
0
P3
4095
SP -80
AO2
205 IN
206 AO2 NOMINAL V
207 AO2 OFFSET V
208 AO2 NOMINAL VALUE
DATA LOGGER (603)
MAINTENANCE (1212)
0V
AO2
CONST REF (11902)
6
O2
10711
908
10712
909
910
912
10701
913
10702
P1
10703
10704
DCF FIELDMODE
(1216)
ST5
RAMP GENERATOR
TORQ REF SELECTION
TORQ REF HANDLING
EMESTOP ACT 10907
EME STOP
LOCAL 10906
MAINTENANCE
10705
10706
1
P3
0
P4
0
P5
0
P6
0
P7
0
P8
2
914
915
916
917
918
919
920
921
SP -49
DO1
801
IN
802
INV IN
RUNNING
FAN CONT
T20
SP -48
DO2
803
IN
804
INV IN
RESET
START INHIBIT
DISABLE LOCAL
FAN ON 10908
ACK CONV FAN
MOTOR 1/2 FIELD
MAIN CONT ON 10910
ACK MAIN CONT
805
MOTOR ACT 10913
MOTOR2
806
TRIP DC BREAKER 10911
FIELD HEAT SEL
DYN BRAKE ON 10912
MAIN CONT MODE
EME STOP MODE
PANEL DISC MODE
PWR LOSS MODE
AUTO-RECLOSING 10914
COMFAULT MODE
COMM FAULT 10915
SP -47
DO3
IN
INV IN
T20
SP -42
DO8
815
IN
816
INV IN
T20
STOP MODE
EXC CONT
T20
FIELD ON 10909
ACK MOTOR FAN
MAIN CONT
COMFLT. TIMEOUT
T20
MAIN CONT
Relay output
SDCS-POW-1
2402
2405
(10903)
300
3200
KPSMIN
P5
2050
KPSPOINT
P6
150
KPSWEAKFILT
P7
15
KI
P8
0
P9
0
TD
P10
0
TF
P11
40
10708
TORQ MIN
SEL1:OUT
LOAD SHARE
X1:
1
Non utilizzato
O1
O2
X1:
2
Non utilizzato
ST5
SP-60
DI10
10122
OUT1
10123
OUT2
10124
OUT3
10718
IN
O2
10719
10720
ST5
SP-59
X1:
DI11
3
Non utilizzato
O1
O2
10721
10722
ST5
SP-58
SP -93
DATASET 3
DI12
4
X1:
Non utilizzato
O1
O2
IN
10724
DI13
6
X1:
O1
O2
7
X1:
Non utilizzato
O1
O2
GEAR.TORQ TIME
T
t
GEAR.TORQ RAMP
CURR LIM P
ARM CURR LIM P
Min
8
X1:
Non utilizzato
ARM CURR LIM N
Max
SPEED ACT
4001
FIELDBUS PAR.1
4002
(MODULE TYPE)
4003
4004
4005
4006
4007
4008
4009
4010
Parameters
4011
depends of
modul type
4012
4013
4014
4015
O2
CURR LIM N
ARM CURR LIM N1
I
ARM CURR LIM N4
SETS SEL1:OUT TO ZERO
-1
RUNNING
ST5
0
1001
P2
P13
P14
20000
23100
0
1001=1,3,5
P1
100%
DRIVE MODE
(1201)
EMESTOP ACT
(10907)
1005 EMF REF SEL
1003 EMF REF
CONSTANTS (12509)
1006
100
1016
160
(10506)
1007
150
1008
4905
P5
P6
410
P7
-4095
P8
P9
1187
P10
3255
50
2190
P2
1000
P3
0
P4
100
1204
1205
1206
(11207)
P5
250
P6
1
P7
358
P8
358
P9
0
P10
1
SPEED MESUREMENT (12103)
P11
0
1202
1203
1207
1208
1209
1213
1210
1211
1212
1214
RELEASE OF ARM.
CONTROLLING
&
I1=I2
4
POT1 VALUE
1
7
FIRST FIELD EXCITER
POT2 VALUE
2
8
SECOND FIELD EXCITER
PERIOD
t
BTW.POT1/2
3
9
4
10
TEST REF
P1
1201=10
DRIVE ID
WRITE ENABLE KEY
WRITE ENABLE PIN
SELECT OPER.SYST
ACTUAL VALUE 1
ACTUAL VALUE 2
P1
TRef2
2 1
X2:
AI5:ERR
P1
0
116 AI5 CONV MODE
P2
2000
117 AI5 HIGH VALUE
P3
-2000
118 AI5 LOW VALUE
10117
1
10
10
10118
ON/OFF LOGIC
3607 INHIB Logic
(11205)
BC
3616 BC Logic
5 4
X2:
+
--
SP -85
AI6
AI6:OUT+ 10119
AI6:OUT- 10120
0
119 AI6 CONV MODE
P2
2000
120 AI6 HIGH VALUE
-2000
121 AI6 LOW VALUE
P3
P4
P5
10
150
AI6:ERR 10121
P1
ST5
BC not Zero
CURRENT ANALYSIS
active, if [1209] = 1
ST5
Non utilizzato
Logic f. INHIBIT
3605 DIFF CURRENT
3606 DIFF CURR DELAY
CURRENT REFERENCE
P6
2048
AI2 (10107)
3615
ADJ REF1
3604 IACT SLAVE
MASTER
6-PULSE
STSYN
*
2048
Regolatore di tensione motore
1010 EMF REG LIM N
1013 FIELD CONST 1
0
0
CDP312
ACTUAL VALUE 3
MACRO SELECT
SP-102
1101 IN USER EVENT 1
1102
TYPE
1103 TEXT
1104
0
11206
P3
0
DLY
SETTINGS (10505)
603
ST20
SETTINGS (10504)
604
MOTOR 1 FIELD (11302)
605
1108 DLY
0
"EXT. IND. 3"
P3
0
1109 IN USER EVENT 3
1110
TYPE
1111 TEXT
P1
1
P2
20000
P3
200
P4
3
606
607
608
609
610
612
613
IN1 Ch.1
IN2 Ch.2
IN3 Ch.3
IN4 Ch.4
IN5 Ch.5
IN6 Ch.6
DLOG.TRIGG COND
[1209]
Curr.Ref.2
Curr.Ref.1
Res. f.Commun
DLOG STATUS
DLOG.TRIGG VALUE
CMT-TOOL
DLOG.TRIGG DELAY
TRIG
DLOG.SAMPL INT
DLOG.TRIG
0
DLOG.STOP
0
DLOG.RESTART
0
RESTART
1113 IN
P1
0
0
USER EVENT 4
1114
Registrazione eventi
TYPE
1115 TEXT
1116
DLY
Cur.Controller for high inductive load
... 407 x8
ARM_CURR_PI_KP
ARM_CURR_PI_KI
... 408 x8
ARM_CONT_CUR_LIM
409
0
3601
REV_DELAY
15
3602
REV_GAP
15
3603
FREV_DELAY
15
P3
0
P4
0
0
1217
421
420
419
Monit. 1
method 2
CUR RIPPLE LIM
CUR RIPPLE MONIT
ZERO CUR DETECT
INTERNAL
0
1
0
1
2
3
A137
F34
A137
F34
CURRENT ZERO
SIGNAL
STSYN
Input for external Overvoltg.Protection
BC
A121
F 21
0
1
OVP SELECT
as FEX 1 (Receiver)
as FEX 2 (Receiver)
5
F03
DriveLogic
EXTERNAL
via Options
RUN DCF
RESET DCF
10916
10917
11303
Fexlink as Transmitter
for FEX1 and FEX2
SP -30
MOTOR 1 FIELD
FANS ON
(10908)
DRIVE MODE 1201=7
(1201)
1313 F1 RED.SEL
0
FIELD MODE 1001=1,3,5
(1001)
1301 F1 REF
100%
1314 F1 SEL.REF
1228
TEST REF2
1302 F1 FORCE FWD
0%
1303 F1 FORCE REV
1304 F1 ACK
2047
200
4710
0
1
20
-4096
4096
1305
1321
1306
1307
1308
1309
1311
1312
F1 CURR GT MIN L
F1 CURR MIN TD
F1 OVERCURR L
F1 CURR TC
F1 KP
F1 KI
F1 U LIM N
F1 U LIM P
SDCS-FEX-2
or
DCF503/504
or
(10908)
FANS ON
(1201)
DRIVE MODE 1201=7
1510
F2 RED.SEL
0
P1
F1 CURR REF
M2FIELD2
SP -28
M1FIELD2
CONSTANTS (12512)
11301
P2
1228
1501 F2 REF
1511 F2 SEL.REF
MOTOR 2 FIELD
100%
TEST REF2
F1 CURR ACT
11302
DATA LOGGER
(605)
DCF501/502
P3
P4
P5
P6
P7
P8
P9
2047
4710
0
1
20
-4096
4096
1502
1503
1504
1505
1506
1508
1509
F2 CURR GT MIN L
F2 OVERCURR L
F2 CURR TC
F2 KP
F2 KI
F2 U LIM N
F2 U LIM P
F2 CURR REF
11501
0%
SDCS-FEX-2
or
DCF503/504
or
DCF501/502
F2 CURR ACT 11502
ST20
SP -24
MOTOR 1 FIELD OPTIONS
P1
10
P4
100
P5
614
P6
200
MOTOR 2 FIELD OPTIONS
1310 F1 U AC DIFF MAX FREE WHEELING
P1
P7
80
P8
80
P9
0
1315
10
1507
F2 U AC DIFF MAX FREE WHEELING
1316
1317
1318
1319
1320
OPTI.REF GAIN
OPTI.REF MIN L
OPTITORQUE
OPTI.REF MIN TD
REV.REV HYST
REV.REF HYST
Regolatore corrente di campo 1 e 2
FIELD REVERSAL
REV.FLUX TD
1117 IN
P1
0
"EXT. IND. 5"
P3
0
USER EVENT 5
1118
TYPE
1119 TEXT
1120
DLY
ST20
0
0
1122
USER EVENT 6
Segnali aggiuntivi
TYPE
1123 TEXT
1124
DLY
CONSTANTS
0
1
2
10
100
1000
TORQ:100%
TORQ:-100%
CUR,FLX,VLT:-100%
OUT
110
P1
0
X18:09
X18:10
X18:11
X18:12
P2
0
P3
0
STSYN
P4
4096
P5
120
P6
130
P7
240
SPEED: 100%
SPEED:-100%
SP -32
(10902)
(10503)
DI8 (10715)
SPEED MONITOR (12201)
M1PROT_2
MOTOR 1 PROTECTION
1401
MOT1.TEMP IN
1402
11401
MOT1.TEMP ALARM L MOT1 MEAS TEMP
1403
MOT1.TEMP FAULT L
1404
KLIXON IN
1405
11402
MODEL1.SEL
MOT1 CALC TEMP
1406
MODEL1.CURR
1407
MODEL1.ALARM L
1408
MODEL1.TRIP L
1409
MODEL1.TC
P1
0
P2
0
P3
0
P4
4096
P5
120
P6
130
P7
240
1602
1603
1604
1605
1606
1607
1608
MOT2.TEMP ALARM L MOT2 MEAS TEMP
MOT2.TEMP FAULT L
MODEL2.SEL
MODEL2.CURR
MODEL2.ALARM L
MODEL2.TRIP L
MODEL2.TC
ST20
12502
MOT2 CALC TEMP
CONST_M1_TRUE
12503
CONST_1
12504
CONST_2
12505
CONST_10
12506
CONST_100
12507
CONST_1000
12508
CONST_31416
12509
EMF_MAX
12510
TORQ_MAX
12511
TORQ_MAX_N
12512
CONST_4095
12513
CONST_M4095
12514
CONST_20000
12515
P1
0
P2
0
P3
0
P4
0
BRAKE CONTROL
RESET
TORQUE ACT
301 HOLD REF
10301
TREF OUT
LOCAL
302 BR RELEASE TREF ENABLE 10302
303 MIN SP IND DECEL CMND 10303
10304
304 ACT BRAKE
LIFT BRAKE
10305
305
START DELAY BRAKE RUN
306
STOP DELAY
307
HOLD TORQ
308
EMESTOP BRAKE
ST20
CONST_M20000
ST
FLTHNDL
SP-103
FAULT HANDLING
FAULT WORD 1
FAULT WORD 2
FAULT WORD 3
LATEST FAULT
ALARM WORD 1
M2PROT_2
MOTOR 2 PROTECTION
MOT2.TEMP IN
CONST_0
SP -74
FREE SIGNALS
12516
SIG1(SPEED REF)
12517
SIG2(SPEED STEP)
12518
SIG3(TORQ. REF A)
12519
SIG4(TORQ. REF B)
12520
SIG5(TORQUE STEP)
12521
SIG6(LOAD SHARE)
12522
SIG7(FLUX REF)
12523
SIG8(EMF REF)
12524
SIG9(FORCE_FWD)
12525
SIG10(FORCE REV)
12526
SIG11(CURR. REF)
12527
SIG12(CURR._STEP)
ST20
1601
12501
ST
SP -76
P1
Questa pagina mostra la routine di condizionamento per i valori di riferimento e di retroazione
della velocità. Il blocco AITAC viene utilizzato per leggere la retroazione di velocità da una
tachimetrica analogica Il blocco SPEED MEASUREMENT elabora i 3 possibili segnali di
retroazione: tachimetrica analogica, generatore di impulsi o tensione di uscita del convertitore
(SPEED_ACT_EMF) - in funzione del blocco EMF TO SPEED CALC (se 2102=5 , la funzione di indebolimento di campo non è disponibile). I parametri vengono utilizzati per
attivare le funzioni di livellamento, selezionare il valore di retroazione e, ove applicabile, per
settare la velocità massima. Questo parametro serve anche per scalare l'anello di controllo
della velocità.
Il blocco SPEED MONITOR contiene la funzione di monitoraggio della tachimetrica e di stallo
del motore e confronta un valore di retroazione di velocità selezionato con la velocità massima, la velocità minima e 2 soglie settabili.
Il blocco AO1 rappresenta un’uscita analogica scalabile.
ALARM WORD 2
ALARM WORD 3
11601
LATEST ALARM
11602
OPERATING HOURS
T20
Il risultato viene confrontato con la retroazione di velocità dal blocco SPEED
MEASUREMENT utilizzando il blocco SPEED ERROR e quindi trasferito al regolatore di
velocità. Questo blocco permette la valutazione della deviazione del sistema per mezzo di un
filtro. Inoltre, è possibile in questo ambito effettuare i settaggi necessari per il modo operativo
“Window”. Se la retroazione di velocità dell’azionamento compare all'interno di una finestra in
corrispondenza del valore di riferimento, il regolatore di velocità viene “bypassato” (se è stato
attivato il modo "Window”; l’azionamento è controllato attraverso un valore di riferimento di
coppia in corrispondenza del blocco TORQ REF HANDLING). Se la retroazione di velocità è
al di fuori della finestra, il regolatore di velocità viene attivato, riportando la velocità effettiva
dell’azionamento all'interno della finestra.
Il blocco SPEED CONTROL contiene il regolatore di velocità con i valori di P, I e DT1. Ai fini
della funzione di adattamento, riceve un’amplificazione P variabile.
Limitazione di coppia / corrente
SP -73
Eventi utilizzatore
CONPROT2
CONVERTER PROTECTION
511
ARM OVERVOLT LEV
512
ARM OVERCURR LEV
508
U NET MIN1
509
U NET MIN2
510
PWR DOWN TIME
514
EARTH.CURR SEL
515
EARTH.FLT LEV
516
EARTH.FLT DLY
527
CONV TEMP DELAY
ST20
10601
Il riferimento di velocità per il generatore della funzione di rampa è generato dai blocchi REF
SEL, che possono essere utilizzati per selezionare il valore di riferimento necessario, il
blocco CONST REF, che genera un massimo di 4 valori di riferimento settabili a titolo permanente, il blocco SOFTPOT, che riproduce la funzione di un motopotenziometro unitamente al
blocco RAMP GENERATOR, oppure dal blocco AI1 (ingresso analogico 1).
Il blocco RAMP GENERATOR contiene un generatore della funzione di rampa con 2 rampe
di salita e di discesa, 2 valori di tempo per la curva a S, le condizioni di limitazione per i limiti
superiore e inferiore, la funzione di mantenimento e le funzioni di "inseguimento" del riferimento o della retroazione di velocità. Un segnale speciale è disponibile per il trattamento
dell'accelerazione e della decelerazione.
Il blocco REF SUM abilita l’uscita del generatore della funzione di rampa e un segnale definibile dall’utente da aggiungere.
Regolatore di velocità
13621
13622
STOP
ST20
13616
13605
TRIG
ST20
31416
SP -98
OUTPUT X18
13608
7
CURRENT
RISE MAX
Iact
Calcolo retroazione di velocità
RESTART
SP -4
P3
SP -94
DATASET 4
13601
13602
13603
13604
13615
STOP
T1ms
1112 DLY
"EXT. IND. 4"
T5
CURRENT CONTROL (10401)
611
SP -5
P1
601
602
ST20
DRIVE LOGIC
RAMP GENERATOR
12 PULSE LOGIC
SPEED MEASUREMENT (12102)
SETTINGS (10501)
1105 IN USER EVENT 2
1106 TYPE
1107 TEXT
DATALOG
DATA LOGGER
SP -21
Conv.Curr.Slave
Arm.Curr.Slave
Conv.Curr.Both
Arm.CURR.Both
Fault Current
1216 DI/OVP
P2
418
32767
ST20
1014 FIELD CONST 2
1015 FIELD CONST 3
Controllo freno
13611
13606
13609
13607
13610
13612
13613
13614
45 6
P1
SP -26
CUR,FLX,VLT: 100%
3611
3612
3613
3614
45 6
Disabled
DCF Current Control
Stand Alone
Reserved
Fexlink Node 1
Fexlink Node 2
MG Set
ST20
Monitoraggio
12PULS_2
3601
REV DELAY
3602
REV GAP
3603
FREV DELAY
40 70 90
OUT
Ingressi e uscite per 12 impulsi
P1
P2
P3
P3
P10
P4
P5
P6
P7
P8
P9
&
EMF ACT
EMF KP
EMF KI
1011 EMF REL LEV
1009 EMF REG LIM P
"EXT. IND. 2"
11203
FEXC STATUS
11210
FEXC1 CODE
11220 FEXC1 SW VERSION
11211
FEXC1 COM STATUS
FEXC1 COM ERRORS 11212
11213
FEXC2 CODE
11221 FEXC2 SW VERSION
FEXC2 COM STATUS 11214
11215
FEXC2 COM ERRORS
FIELDBUS NODE ADDR
0
3610 Revers.Logic
11003
0
SP -6
11204
TC STATUS
11201 COMMIS STAT
11205
BC
11202 BACKUPSTOREMODE
11222 PROGRAM LOAD
11216
11218 CNT SW VERSION CMT COM ERRORS
11217
11219 CNT BOOT SW VER CDI300 BAD CHAR
CMT DCS500 ADDR
P9
Bridge
IREF1-Polarity
IREF2-Polarity
IREF1-Pol.Master
IREF2-Pol.Broth
Bridge of Slave
Indicat.Revers
Fault Reversion
11002
GENER.EMF REF
"EXT. IND. 1"
SPEED LOOP
EMF CONTROLLER
SQUARE WAVE
10
3608 IREF0 Logic
3609 Bridge Logic
F CURR REF
P2
LOCAL EMF REF
ARM. CONTROLLER
0
0
P8
10730
cal
11001
SP -7
P3
4
13617
X18:13
13618
X18:14
13619
X18:15
13620
X18:16
FLUX REF SUM
1018 FIELD WEAK DELAY
TEST REF SEL
P7
12-PULSE LOGIC
BRIDGE REVERSAL LOGIC
active, if [1209]= 1 or 2
100%
generatoric
4
0
INPUT X18
FLUX REF 1
1012 FIELD WEAK POINT
1017 GENER.WEAK POINT
MANTUN_3
5000
SP -99
:
:
:
2
:
3
:
4
:
5
6 :
6
EMFCONT2
FIELD MODE
MAINTENANCE
TEST RELEASE
P6
AI5:OUT-
+
--
1
4
SP -34
S21.233
S21V2_0
DCS500_1.5
P5
10116
0
12308
P11
10726
10728
P2
EMF CONTROL
10725
10727
DI2 (10703)
FLUX REF1
60
AI5:OUT+
DCF MODE :
n
ARM CURR LIM N5
P4
STSYN
AI5
1215
CURRENT MONITOR
ARM CURR LIM N3
80
SP -86
0
2
EMF:100%
212 IN1
213 IN2
214 IN3
ST5
C_MONIT
SP -104
ARM CURR LIM N2
230
ST5
Non utilizzato
DCFMOD
TREF B SLOPE
SP -2
209
IN1
210
IN2
211
IN3
ST5
Regolatore corrente
d'armatura
x x y
y 4192
MAX CURR LIM SPD
P3
10729
410 ARM L
411
ARM R
417 ARM CURR CLAMP
12307
SP -92
DATASET 2
ST5
SP -97
O1
ARM CONT CURR LIM
ARM ALPHA LIM MAX
413 ARM ALPHA LIM MIN
414 DXN
x x y
y 4192
SP -22
DI15
ARM CURR PI KI
412
Limitazione di coppia/corrente
GEAR.START TORQ
P2
ST5
SP-55
409
ARM CURR PI KP
REF DCF
Manutenzione
ST5
SP-56
DI14
408
TREF A FTC
-1
ST5
ST5
SP-57
Non utilizzato
10125
OUT1
10126
OUT2
10127
OUT3
10723
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
P01
P02
P03
P04
P05
P06
P07
P08
P09
P10
P11
P12
P13
P14
P15
ST5
O1
407
12401
ST20
FLBSET_2
FIELDBUS
DATA LOGGER (606)
ARM CURR REF SLOPE
415 ARM CURR LIM P
416 ARM CURR LIM N
TREF B
Ingressi e uscite per fieldbus
SP-95
10401
REF TYPE SEL
Max
P3
SP -91
DATASET 1
10402
406
1 2
TREF A
"EXT. IND. 6"
Ingressi digitali
aggiutivi
10404
STSYN
7
Must be connected, when no fan acknowledges (DI1, DI2)
10717
SET OUTPUTS TO ZERO
Torque ref
DROOPING
1121 IN
SP-61
DI9
-1
RUNNING
ST5
405
10403
t
from ext. FEXLINK
P1
SDCS-IOE-1
TORQ MIN2
SP -3
SP -43
DO7
813
IN
814
INV IN
T20
ST5
Morsetto
1366
P4
X7:
4
X6:
O2
10707
(11209)
SETTINGS (10505)
T20
O1
ARM ALPHA
BLOCK
Min
(10906)
LOCAL
1201
0
DRIVEMODE
SETTINGS (10501)
SP -44
DO6
811
IN
812
INV IN
ST5
SP -66
DI4
0
P2
P3
6
3
O2
P1
TORQ MAX2
(10903)
X7:
X6:
MAIN CONT
O1
ALARM 10905
INV IN
T20
1 2
2
O2
SP -67
DI3
0
P2
O1
FAULT 10904
COAST STOP
810
(11208)
P1
SP -45
DO5
IN
X96:
X6:
MOTOR FAN
RUN3
LOCAL
ST5
SP -68
DI2
1
RUN2
809
3
1
O2
RDY ON 10901
RDY RUNNING 10902
RUNNING 10903
RUN1
RDY RUNNING
T20
DRLOGI_2
MIN SPEED
(12201)
BC (BLOCK.)
(11205)
907
911
O1
DRIVE LOGIC
ON/OFF
INV IN
X7:
X6:
CONV FAN
904
10710
ST5
SP -69
DI1
TORQ MAX
SP -100
2
O1
808
SP -46
DO4
IN
X7:
X6:
RESET
903
906
10709
ST5
SP -64
DI6
807
1
5
O2
CURR STEP
Scelta riferimento di velocità
X7:
X6:
EM STOP
CURR REF
10405
ST20
5
8
REF SEL (1911)
BRAKE CONTROL (302)
905
O1
404
ST5
X7:
X6:
SP -65
DI5
SEL2.TREF SEL
ST10
4
7
902
ST5
TORQ MAX2 12305
P3
P4
10503
10714
10716
403
ARM DIR
TREF TORQMIN1
DATA LOGGER (602)
MAINTENANCE (1211)
525 UNI FILT TC
(only for Cur. Controlling)
522
LANGUAGE
901
O2
SEL2.TORQ STEP
TREF TORQMAX1
10515
Ingressi e uscite digitali (standard)
10715
2404
TREF TORQMIN1 12304
DATA LOGGER (604)
X7:
X6:
RUN
TREF TORQMAX112303
10508
U ARM ACT 10505
+
- CALC
Iact
SP-36
O1
0
P12
Control Adjust.
523 CURR ACT FILT TC
524
PLL CONTROL
528 PLL DEV LIM
ST5
SP -62
DI8
Max
0
P2
P1
Morsetto
O2
Min
TREF TORQ MIN
P1
SPC TORQMIN1 12302
e di motore
SDCS-CON-2
ON/OFF
TREF TORQ MAX
Software version:
Schematics:
Library:
Morsetto
10713
Max
SPC TORQMAX1 12301
DCS 500B Struttura software
SDCS-CON-2
O1
1
KP
(10907)
EMESTOP ACT
1004
FLUX REF SEL
1002
CONSTANTS (12512)
FLUX REF
(12102)
SPEED ACT
ST20
SP -63
DI7
2406
ACCELCOMP
X4:
10
P9
AI3 LOW VALUE
AI4:OUT+
2409
10 8
2000
P3
P8
AI3 HIGH VALUE
AI4:OUT-
+
--
-2000
0
500
AI3 CONV MODE
AI4
P3
P2
SP -87
Non utilizzato
P2
0
P7
ST5
P1
P1
SP -88
AI3:ERR 10112
P1
Min
SPC TORQ MIN
SETTGS_3
SP -1
108 AI2 HIGH VALUE
109
AI2 LOW VALUE
AI3
TORQUE/CURRENT LIMITATION
SPC TORQ MAX
ST5
AI2 CONV MODE
Non utilizzato
(11702)
FREE SIGNALS (12520)
SET OUT TO ZERO
BC
402
CURR REF IN LIM
CURR DER IN LIM
5
P1
RUNNING
12-PULS
[1209] 1,2
FLUX REF1
MON.MEAS LEV
10 7
10000
4000
STALL.TORQUE
201
P1
2403
TORQ MIN2 12306
STALL.SEL
P11
0
CLEAR
CONSTANTS (12527)
ARM CUR ACT
SP -105
12204
ST5
P1
HOLD
RINT
CONSTANTS (12526)
4
SP ERR
SPEED CONTROL (2011)
FLUX N
TORQ REF
SP -10
SPMONI_2
SPEED MONITOR
MIN SPEED L
SP -81
12101
Calcolo retroazione di velocitá
+
--
HOLD
3
Max
(12001)
SEL2:IN_LIM
12404
401
ARM CURR REF
DCF FIELDMODE
ST20
MAINTENANCE
(1210)
T5
Riferimento
di coppia
VAL2
Min
SEL2:OUT
SPEED CONTROL
(2010)
TORQ REF HANDLING
FREE SIGNALS (12521)
AITAC CONV MODE
102
SET2
BAL2REF
2
12402
TORQ REF SELECTION
CH B
101
BAL2
SEL2.TREF EXT
SEL2:TORQ/SPEED
ST5
11702
2401
P1
0
VAL1
2408
1
SP -8
CH A
P1
BALREF
12005
0
SEL2.TREF SPC
CURRENT CONTROL
12403
P1
Encoder incrementale
-8...-30V
-30...-90V
-90...-270V
2012
SET1
2407
SPC TORQMIN1
1713 SMOOTH2
1715 SPEEDMAX
SP -11
SP -84
2011
BAL
IN LIM
12004
SPC TORQMAX1
FREE SIGNALS (12519)
+
2010
2007
RUNNING
T20
(10903)
Tacho
Tachimetrica
2009
OUT
0
C_CNTR_3
SP -75
TORQ REF HANDLING
KP
DROOPING
12002
TREFHND2
SPEED CONTROL
IN
SPEED ACT
T+
DECEL1
1710
2004
2006
12001
ST5
ACCEL2
1712
2003
OUT
E-
ACCEL1
1709
2005
0
P1
SP -17
REFSUM_2
1801
IN1
OUT 11802
1802 IN2
H
1707 T1/T2
1714 EMESTOP RAMP
1711
OUT 11701
2021
SP -9
SP -14
SPEED ERROR
IN
1923 ENABLE
1921 OHL
1922 OLL
DRIVE LOGIC (10903)
5000
LOC REF
1708
SP -13
2001
SPEED
11801
REFERENCE
11703
SIGN
1706 RES OUT
ST5
P1
RAMP GENERATOR
(10906)
LOCAL
0
1702 RES IN
1717
STARTSEL
0
1703 HOLD
1916 ADD
1917 REV
ST5
RAMP_3
SP -18
1720 SPEED SET
1701 IN
REF SEL
1910 IN1
1911 SEL1
11101
11102
11103
SPEED_STEP
TORQ_REF_B
TORQ_STEP
LOAD_SHARE
CUR_REF
CUR_STEP
Il “riferimento di coppia” generato dal regolatore di velocità viene trasferito all’ingresso del
blocco CURRENT CONTROL tramite il blocco TORQ REF HANDLING, dove viene convertito
in un valore di riferimento di corrente e utilizzato per la regolazione della corrente. Il blocco
TORQUE/CURRENT LIMITATION viene utilizzato per generare i vari valori di riferimento e
le limitazioni; questo blocco contiene le seguenti funzioni: “limitazione di corrente in funzione
della velocità”, “compensazione gioco ingranaggi”, “generazione dei valori per la limitazione
della corrente statica” e “limitazione di coppia”. I valori delle varie limitazioni vengono anche
utilizzati in altri punti, ad esempio nei seguenti blocchi: SPEED CONTROL, TORQ REF
HANDLING, TORQ REF SELECTION e CURRENT CONTROL.
Il blocco AI2 (ingresso analogico 2) viene utilizzato per la lettura di un segnale analogico.
Il blocco TORQ REF SELECTION contiene una limitazione con aggiunta a monte di due
segnali, uno dei quali può essere instradato attraverso un generatore della funzione di rampa;
l'altra valutazione del segnale può essere modificata dinamicamente utilizzando un moltiplicatore.
Il blocco TORQ REF HANDLING determina il modo operativo dell'azionamento. Se si trova
nella posizione 1, significa che è attivato il modo di controllo della velocità, mentre se si trova
nella posizione 2, significa che è attivato il modo di controllo della coppia (senza controllo ad
anello chiuso poiché nell’unità non è disponibile una retroazione di coppia “pura”). In entrambi
i casi, il valore di riferimento necessario proviene dall’esterno. Le posizioni 3 e 4 sono una
combinazione delle prime due opzioni sopra indicate. Si osservi che, con la posizione 3, il
valore più basso tra il riferimento di coppia esterno e l’uscita del regolatore di velocità viene
trasferito al regolatore di corrente, mentre con la posizione 4 il valore preso in considerazione è il maggiore. La posizione 5 utilizza entrambi i segnali, e corrisponde al metodo di funzionamento del modo “Window”.
Regolatore corrente d'armatura
Il blocco CURRENT CONTROL contiene il regolatore di corrente con il valore di P e I, più un
adattamento nel campo del flusso della corrente continua. Questo blocco contiene anche le
funzioni per la limitazione dell’aumento di corrente, la conversione del valore del riferimento
di coppia in un valore di riferimento di corrente per mezzo del punto di incrocio del campo, e
alcuni parametri che descrivono la rete di alimentazione e il circuito di carico.
Per le applicazioni con carico induttivo e performance dinamiche elevati si utilizza un hardware diverso per generare una corrente di segnale uguale a zero. Questo hardware viene selezionato dal blocco CURRENT MONITOR. Le funzioni di monitoraggio corrente possono a
questo punto essere adattate ai requisiti dell'applicazione. Ciò consente di assicurare una più
facile manipolazione e un grado più elevato di sicurezza per azionamenti ad prestazioni
elevate come, ad esempio, i banchi di prova.
La modalità DCF può essere attivata attraverso il blocco DCF FIELDMODE. In questa modalità si possono specificare le funzionalità. In base alla funzione selezionata, il regolatore di
corrente riceve una diversa caratteristica, viene monitorata la protezione da sovratensione
DCF 506 viene instradato il riferimento di corrente e di campo attraverso i morsetti X16:.
motore superiore anche con sistemi a 4 quadranti è possibile impostare mediante i parametri
due diversi punti di indebolimento di campo.
Regolatore corrente di campo 1 e 2
Poiché un convertitore di potenza DCS può controllare due unità di campo, alcuni dei blocchi
funzione sono duplicati. Questo significa che, a seconda della configurazione meccanica
degli azionamenti, si possono controllare due motori in parallelo o alternatamente. La configurazione della struttura del software può essere generata progettando in maniera appropriata i blocchi durante la routine di messa in funzione.
Il blocco MOTOR1 FIELD / MOTOR2 FIELD legge il valore di riferimento della corrente di
campo e tutti i valori specifici dell’unità di alimentazione di campo per trasferirli al convertitore
di potenza di campo attraverso un collegamento seriale interno; il convertitore di potenza di
campo viene scalato in funzione del rispettivo hardware, ed effettua la regolazione della
corrente di campo. La direzione della corrente di campo per il motore 1 può essere determinata utilizzando comandi binari, mentre per il motore 2 può essere generata nel corso
dell’applicazione a monte del blocco di interesse.
Il blocco MOTOR1 FIELD OPTIONS/MOTOR2 FIELD OPTIONS controlla la funzione di
libera circolazione in presenza della minima tensione di rete e la funzione di inversione della
corrente di campo con gli azionamenti dotati della funzione di inversione di campo (solo per il
motore 1). Nel caso degli azionamenti dotati della funzione di inversione di campo, è prevista
un’opzione per influire selettivamente sulla coppia del circuito di indotto e sulla riduzione e
l'aumento della corrente di campo.
Ingressi e uscite digitali (standard)
Il blocco DRIVE LOGIC legge vari segnali dal sistema attraverso gli ingressi digitali DIx, li
elabora e genera dei comandi che vengono trasmessi al sistema attraverso le uscite digitali
DOx, ad esempio per il controllo del contattore di rete del convertitore di potenza, il contattore
del circuito di campo o i contattori di vari ventilatori, oppure per la trasmissione in uscita dei
messaggi di stato.
Ingressi digitali aggiuntivi
I blocchi AI3 e AI4 rappresentano altri 2 ingressi analogici non ancora assegnati ad alcuna
particolare funzione. I blocchi A15 e A16 rappresentano altri 2 ingressi aggiuntivi che sono
attivi soltanto se è collegata la scheda SDCS-IOE1. Con questo hardware aggiuntivo, si
rendono disponibili altri 7 ingressi digitali DI 9 .. DI15.
Ingressi e uscite per fieldbus
Se i segnali analogici e digitali non sono sufficienti per il controllo dell'azionamento, è necessario utilizzare un modulo bus di campo con riferimenti di comunicazione seriale (sono disponibili apparecchiature per l'installazione di Profibus, CS31, Modbus ecc.).Questo tipo di
modulo è attivato per mezzo del blocco FIELDBUS. I dati trasferiti dal controllo al convertitore
vengono memorizzati nei blocchi DATASET1 e DATASET3 come informazioni a 16 bit. A
seconda dell'applicazione, per trasmettere i messaggi, i pin di uscita di questi blocchi devono
essere collegati ai pin di ingresso di altri blocchi. La stessa procedura vale per i blocchi
DATASET2 e DATASET4, se collegati. Questi blocchi trasmettono le informazioni dal convertitore al sistema di controllo.
Ingressi e uscite per 12 impulsi
Il convertitore può essere configurato in un'applicazione parallela a 12 impulsi. In questo
caso, occorrono: due convertitori con indotto identici; un'unità di alimentazione di campo; una
reattanza T; cavo piatto di comunicazione collegato a X 18 dei due convertitori; La LOGICA A
12 IMPULSI deve essere attivata e garantisce il controllo sincrono dell'azionamento MASTER
e SLAVE.
Manutenzione
Il blocco MAINTENANCE fornisce valori di riferimento e condizioni di prova per consentire a
tutti i regolatori di essere tarati in base al convertitore di potenza. Se il pannello viene utilizzato come sistema di misura nello sportello dell'armadio possono essere definiti in questa
sede una serie di segnali.
Monitoraggio
Il blocco CONVERTER PROTECTION tiene sotto controllo il circuito d’indotto per individuare
condizioni di sovratensione e sovracorrente e controlla inoltre la rete per individuare condizioni di minima tensione. Costituisce un’opzione per leggere la corrente totale delle 3 fasi
attraverso un sensore esterno aggiuntivo e per tenere sotto controllo la condizione di "diverso
da zero". Vengono effettuati adattamenti per applicazioni di ricostruzione che mantengono la
sezione di potenza e il ventilatore al fine di identificare eventuali condizioni di sovraccarico e
guasti del ventilatore.
Il blocco MOTOR1 PROTECTION, nella sua parte superiore, valuta il segnale proveniente
dal sensore di temperatura analogico o da un Klixon. Nella parte inferiore calcola invece il
surriscaldamento del motore con l'ausilio del valore di retroazione della corrente e di un
modello del motore, dopodiché trasmette un messaggio in uscita.
Il blocco MOTOR2 PROTECTION funziona nello stesso modo del blocco MOTOR1
PROTECTION, ma senza valutazione Klixon.
Eventi utilizzatore
Usando il blocco USER EVENT1 fino a USER EVENT6 vengono creati sei differenti messaggi, che sono visualizzati come guasti o allarmi sul pannello CDP312 come pure sul display a
7 segmenti del convertitore
Controllo freno
Il blocco BRAKE CONTROL genera tutti i segnali necessari per il controllo di un freno meccanico.
11107
11104
11105
11106
11108
Dati di linea e di motore
Registrazione eventi
Il blocco SETTINGS serve per l'adattamento di tutti i segnali importanti come la tensione di
rete la tensione e la corrente del motore e la corrente di campo. Sono disponibili parametri
per regolare il controllo in condizioni speciali come reti deboli o interazioni con sistemi di filtri
di armoniche. Si può selezionare la lingua desiderata per la visualizzazione delle informazioni
sul display della pulsantiera di controllo.
Il blocco AO2 rappresenta un'uscita analogica scalabile.
Il blocco DATA LOGGER è in grado di registrare un massimo di sei segnali. I valori di questi
segnali vengono memorizzati in una RAM con buffer a batterie e restano quindi disponibili
anche in caso di mancanza della tensione di alimentazione. Il tempo di registrazione può
dipendere da un segnale di scatto, oltre che dal numero dei valori registrati prima e dopo il
segnale di scatto. La funzione DATA LOGGER può essere settata sia con il pannello sia con
un tool per PC. Per la valutazione dei valori registrati è consigliabile utilizzare un tool per PC.
Regolatore di tensione motore
Segnali aggiuntivi
11109
Il blocco EMF CONTROL contiene il regolatore della tensione del circuito d’indotto (regolatore EMF). Si basa su una struttura parallela comprendente un regolatore PI e una funzione di
pre-controllo, generata con una caratteristica 1/x. Il rapporto fra i due percorsi può essere
settato. La variabile di uscita di questo blocco è il valore di riferimento della corrente di campo, che viene prodotto dal valore di riferimento di flusso mediante un’altra funzione caratteristica utilizzando la linearizzazione. Per consentire all'azionamento di utilizzare una tensione
Utilizzando il blocco FAULT HANDLING i guasti e gli allarmi dell'azionamento vengono raggruppati come informazione a 16-bit. I blocchi CONSTANTS e FREE SIGNALS possono
essere utilizzati per impostare limiti o particolari condizioni di prova.