Lezione di geografia astronomica: sistemi di coordinate celesti, misure di distanza, movimenti
della Terra (rivoluzione e rotazione).
Sommario della lezione.
Capitolo 1: Introduzione ai sistemi di coordinate usati in astronomia.
In astronomia solitamente per specificare la posizione di un astro non si usano coordinate di
tipo cartesiano (distanza lineare di un punto dagli assi) ma di tipo polare (distanza del punto
dall’origine e direzione della linea di vista del punto rispetto a un asse di riferimento). Questo
sistema ha il vantaggio di trattare in modo separato la direzione in cui si vede l’oggetto dalla
sua distanza dall’osservatore, che spesso per oggetti astronomici è nota in modo impreciso o
non è nota affatto.
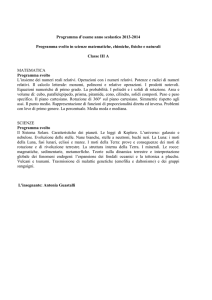
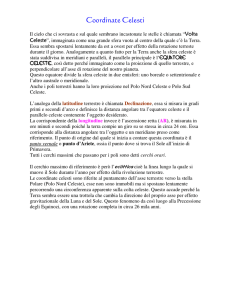
Tutti i sistemi di coordinate polari usati in astronomia si basano su un unico principio. La
direzione nello spazio in cui si vede un astro (il vettore r che punta in direzione dell’astro,
cioè l’asse che congiunge la posizione dell’astro con l’origine delle coordinate) è specificata
da due angoli: il primo angolo (altezza) specifica l’altezza del vettore rispetto a un piano (xy),
che viene scelto come piano di riferimento; il secondo angolo (longitudine φ) specifica la
direzione della proiezione del vettore sul piano di riferimento, misurata rispetto a un asse del
piano che viene scelto come origine delle longitudini (asse x). In alternativa all’altezza sul
piano xy si può usare l’angolo formato con l’asse z (indicato in figura con la lettera θ);
ovviamente i due angoli forniscono la stessa informazione in quanto sono complementari (la
loro somma è pari a 90 gradi).
Un esempio molto noto di coordinate polari è costituito dalle coordinate geografiche,
longitudine e latitudine. Si tratta di coordinate definite in un sistema di riferimento solidale con
la Terra, in cui si assume come piano di riferimento xy il piano dell’equatore. Il piano che
passa per il centro della Terra e il punto della superficie in esame definisce un cerchio
massimo sulla superficie terrestre, il meridiano locale. La longitudine del luogo è l’angolo φ
formato tra il meridiano locale e un meridiano assunto convenzionalmente come origine delle
longitudini, solitamente il meridiano di Greenwich, misurato in senso antiorario. La latitudine
è l’altezza angolare sul piano dell’equatore della verticale locale (il segmento che congiunge il
centro della Terra con il luogo considerato). In alternativa alla latitudine si può usare il suo
angolo complementare, la colatitudine θ, cioè l’angolo tra la verticale locale e l’asse Z
ortogonale all’equatore (che è l’asse di rotazione terrestre).
Latitudine e longitudine definiscono un sistema a griglia di cerchi mutuamente ortogonali: i
meridiani sono cerchi massimi (passanti per il centro della Terra) ortogonali al piano
equatoriale che corrispondono all’insieme dei punti aventi uguale longitudine …
… mentre i paralleli sono cerchi paralleli all’equatore che corrispondono all’insieme dei punti
aventi uguale latitudine. A differenza dei meridiani, i paralleli in genere non sono cerchi
massimi, cioè non passano per il centro della Terra; solo l’equatore, che può essere considerato
il parallelo che corrisponde alla latitudine zero, è un cerchio massimo.
Il sistema di coordinate più intuitivo per descrivere la posizione di un astro è il sistema
altazimutale, che assume come piano di riferimento il piano dell’orizzonte del luogo dove si
trova l’osservatore.
I due angoli che definiscono il sistema altazimutale sono l’azimut (scritto anche azimuth),
misurato lungo il piano dell’orizzonte (di solito in senso orario da Nord verso Est), e l’altezza
sul piano dell’orizzonte. In alternativa all’altezza si usa spesso il suo angolo complementare, la
distanza zenitale (lo Zenit è il punto della volta celeste esattamente sopra la verticale locale e
quindi ha altezza sull’orizzonte pari a 90 gradi).
A causa della rotazione terrestre la volta celeste sembra ruotare attorno a un asse che
corrisponde alla direzione dell’asse di rotazione terrestre (Polo celeste). L’animazione mostra
la rotazione della volta celeste quando si osserva il cielo verso occidente, cioè dalla parte dove
gli astri tramontano. L’altezza del polo sull’orizzonte è uguale alla latitudine del luogo da cui
si sta osservando, in questo esempio circa 45 gradi.
Questa fotografia del cielo notturno è stata scattata puntando la macchina fotografica (fissata a
un treppiede) in direzione nord e usando un tempo di posa di alcune ore. Le immagini delle
stelle appaiono come “strisciate” per effetto della rotazione della volta celeste. Come si vede, il
moto di ogni stella è un arco di cerchio che ha per centro il Polo nord, l’unico punto che
rimane fermo durante la rotazione. La stella più vicina al Polo nord visibile nella fotografia,
che compie un arco di raggio molto piccolo, è la Stella Polare.
Il moto diurno degli astri (cioè il moto apparente delle stelle dovuto alla rotazione terrestre)
consiste in una traiettoria circolare sulla volta celeste che ha per centro il Polo. Alla latitudine
di Milano (circa 45 gradi) tutte le stelle che hanno una distanza dal Polo inferiore a 45 gradi
percorrono quindi nell’arco della giornata un cerchio completo che si trova tutto sopra
l’orizzonte, quindi non tramontano mai (anche se naturalmente di giorno risultano invisibili a
causa della luminosità del cielo); si dice che queste stelle sono circumpolari. Le stelle con
distanza dal Polo superiore a 45 gradi invece percorrono cerchi che intersecano l’orizzonte e
quindi nascono e tramontano.
L’aspetto della rotazione diurna e la distinzione tra stelle circumpolari e non circumpolari
naturalmente dipende dalla latitudine del luogo da cui si osserva. Se ci si trova al Polo nord, il
polo celeste è allo zenit e tutti gli astri percorrono cerchi paralleli all’orizzonte, cioè la loro
altezza sull’orizzonte è costante: tutte le stelle sono circumpolari.
Al contrario se ci si trova all’Equatore il Polo celeste si trova sulla linea dell’orizzonte e tutte
le stelle percorrono cerchi verticali. Quindi all’equatore tutte le stelle tramontano: non esistono
stelle circumpolari. Nota: per l’interpretazione della figura, tenete conto che è disegnata
mettendo in alto il Polo nord, quindi il piano dell’orizzonte risulta verticale. Se questa
orientazione vi confonde, pensate di ruotare la figura di 90 gradi in senso antiorario.
Le coordinate altazimutali sono comode in quanto descrivono la posizione di un astro rispetto
a punti di riferimento facilmente individuabili dall’osservatore (orizzonte, verticale, direzione
del Nord geografico). Tuttavia, poiché la volta celeste ruota rispetto alla Terra, le coordinate di
una stella cambiano nel corso della giornata; inoltre le coordinate altazimutali dipendono dal
luogo da cui si osserva. In molti casi è quindi più comodo usare un sistema di riferimento
solidale con la volta celeste invece che con la Terra. Esistono diversi sistemi di questo tipo, ma
il più usato è quello che utilizza come piano di riferimento il piano equatoriale terrestre; ciò è
possibile perché l’asse di rotazione terrestre e quindi il piano equatoriale terrestre sono
immobili rispetto alla sfera celeste. Le coordinate angolari definite in questo modo vengono
chiamate ascensione retta (angolo misurato sul piano dell’equatore, analogo alla longitudine
terrestre) e declinazione (angolo sopra il piano equatoriale, analogo alla latitudine).
Come punto di riferimento sull’equatore celeste, origine per la misura dell’ascensione retta, si
usa uno dei due punti di intersezione tra l’equatore celeste e il piano dell’orbita apparente del
Sole intorno alla Terra (eclittica), e precisamente il cosiddetto punto vernale o primo
dell’Ariete o punto , che corrisponde alla posizione occupata dal Sole all’equinozio di
primavera. Nota: come si vede dalla figura, l’ascensione retta viene spesso misurata non in
gradi ma in ore. Non si tratta naturalmente di ore di tempo, ma di una unità di misura
alternativa degli angoli che risulta dalla divisione dell’angolo giro in 24 (ore) parti invece che
in 360 (gradi); considerata come misura angolare, 1 ora corrisponde a 15 gradi.
L’ascensione retta e la declinazione definiscono sulla volta celeste una griglia di coordinate
attraverso cerchi mutuamente ortogonali, analoghi al sistema di meridiani e paralleli sulla
Terra.
Se idealmente si potesse visualizzare la griglia di coordinate definite da ascensione retta e
declinazione, questa sarebbe ovviamente solidale con le stelle fisse e quindi si vedrebbe
ruotare insieme alla volta celeste nel corso della giornata. Ogni stella fissa ha una posizione
sulla volta celeste che è identificata da una coppia di coordinate (ascensione retta e
declinazione) che non cambiano nel tempo; naturalmente queste coordinate potrebbero essere
trasformate in coordinate altazimutali (valori di azimut e altezza), ma questa trasformazione
dipende dalla posizione geografica e dall’ora del giorno.
Capitolo 2: Unità di misura e metodi per la misurazione di distanze astronomiche.
Gli oggetti astronomici hanno dimensioni molto maggiori di quelle del mondo con cui siamo
quotidianamente in contatto. Per farsene un’idea approssimata forse è utile trasformare le
distanze chilometriche in tempi di percorrenza di un ipotetico viaggio aereo, supponendo per
semplicità di usare un aereo con velocità di crociera di 1000 km/h; a questa velocità una
distanza pari al raggio della Terra verrebbe percorsa in poco più di 6 ore, e la circonferenza
terrestre (giro del mondo) in 40 ore. Alla stessa velocità la distanza Terra-Luna corrisponde a
16 giorni di viaggio, e la distanza Terra-Sole a 17 anni. È chiaro che per esprimere le distanze
dei corpi celesti, anche i più vicini a noi come i pianeti del Sistema Solare, il chilometro non è
un’unità di misura adatta …
… per cui gli astronomi hanno introdotto altre unità di misura. All’interno del Sistema Solare
si usa l’unità astronomica (simbolo AU, dall’inglese Astronomical Unit) , definita come il
valore medio della distanza Terra-Sole. Nettuno, il pianeta più lontano, si trova a circa 30 AU
dal Sole (molto approssimativamente questo numero potrebbe essere considerato come il
raggio del Sistema Solare). Le stelle più vicine al Sole si trovano però a distanze molto
superiori (almeno decine di migliaia di volte più grandi), tanto grandi da rendere scomodo
l’uso dell’Unità Astronomica.
Per esprimere le distanze stellari si usa un’altra unità: l’anno luce, definito come la distanza
percorsa dalla luce (che si muove a circa 300 mila chilometri al secondo) in un anno. Un anno
luce corrisponde a più di 60 mila unità astronomiche. Le distanze delle stelle più vicine sono
dell’ordine di pochi anni luce. Il diametro della Via Lattea, la galassia in cui si trova il nostro
Sistema Solare, è di circa 100 mila anni luce. Le galassie distano tra loro milioni di anni luce, e
l’Universo ha un raggio di circa 13 miliardi di anni luce.
La galassia M31 (“galassia di Andromeda”) è una delle galassie più vicina alla nostra, tanto da
essere visibile anche a occhio nudo. Ha un diametro di più di 200 mila anni luce e dista da noi
2,5 milioni di anni luce.
Le galassie del cosiddetto “gruppo locale”, di cui fa parte anche la nostra Galassia, sono
distribuite in una zona di pochi milioni di anni luce di diametro.
Come si misurano le distanze tra i corpi celesti? I più grandi radiotelescopi possono essere
usati come radar, inviando un fascio di onde radio verso un corpo celeste e misurando il tempo
impiegato da esso per andare e tornare. Questo metodo richiede fasci di onde radio tanto più
potenti quanto più l’oggetto è lontano e in pratica può essere usato solo per i corpi del Sistema
Solare più vicini a noi (fino a una distanza massima di poche unità astronomiche).
Per oggetti più distanti si usa il metodo della parallasse, nome tecnico usato per indicare un
fenomeno ottico molto semplice, e cioè che l’allineamento tra oggetti vicini e lontani cambia a
seconda della posizione dell’osservatore. Ad esempio la posizione apparente di un albero
vicino rispetto a uno sfondo lontano cambia quando mi sposto di lato.
Analogamente la posizione di una stella vicina cambia rispetto allo sfondo delle stelle più
lontane nel corso dello spostamento ciclico della Terra lungo la sua orbita attorno al Sole.
Questo tipo di parallasse viene detta parallasse annuale in quanto il movimento apparente
della stella presenta un andamento periodico che si ripete di anno in anno. Si tenga presente
che la maggior parte delle stelle sono così lontane che la loro parallasse è praticamente nulla,
cioè formano uno sfondo immobile che costituisce un buon riferimento per valutare lo
spostamento delle poche stelle più vicine a noi.
L’effetto di parallasse risulta tanto maggiore quanto più la stella è vicina al Sole. Lo
spostamento angolare dovuto all’effetto di parallasse può essere misurato, e da questa misura
si può calcolare direttamente la distanza della stella (dato che la misura dello spostamento
dell’osservatore, cioè il diametro dell’orbita terrestre, è nota).
Una stella che ha una parallasse di un secondo d’arco ha una distanza dal Sole pari a circa 200
mila unità astronomiche, cioè poco più di 3 anni luce. Questa lunghezza è spesso usata in
astronomia come unità di misura delle distanze, con il nome di parsec, in alternativa all’annoluce.
Capitolo 3: Il movimento orbitale dei pianeti, le leggi di Keplero e il movimento orbitale
della Terra.
Il movimento orbitale dei pianeti è stato descritto per la prima volta in modo esatto da
Johannes Kepler ed è espresso dalle famose tre leggi che da lui prendono il nome. Keplero
scoprì le tre leggi in modo puramente empirico, analizzando le precise osservazioni delle
posizioni dei pianeti (soprattutto Marte) che erano state raccolte dal suo maestro Tycho Brahe
(1546-1601) e trovando per tentativi la legge matematica che meglio le descriveva.
La prima legge di Keplero dice che ogni pianeta descrive intorno al Sole un’orbita periodica di
forma ellittica, di cui il Sole occupa uno dei fuochi. Si noti che questa legge dice anche
implicitamente che: a) la traiettoria dei pianeti si svolge in un piano, in quanto l’ellisse è una
curva piana; b) la traiettoria dei pianeti è chiusa, cioè il pianeta ad ogni giro intorno al Sole
ripercorre la stessa traiettoria del giro precedente. L’ellisse è una curva matematica che può
essere descritta come un cerchio schiacciato lungo una dimensione: le sue dimensioni sono
descritte dal semiasse maggiore a e dal semiasse minore b.
Il grado di “schiacciamento” dell’ellisse è descritto da una grandezza che si chiama
eccentricità e che può avere valori compresi tra 0 e 1. Un’ellisse con eccentricità uguale a zero
ha il semiasse maggiore uguale al semiasse minore e quindi si riduce a un cerchio. Al crescere
dell’eccentricità lo schiacciamento dell’ellisse diventa sempre più grande e il semiasse minore
si riduce. Quando l’eccentricità arriva a 1, l’ellisse degenera in un segmento (il semiasse
minore ha lunghezza nulla). I fuochi dell’ellisse (uno dei quali costituisce la posizione
occupata dal Sole) sono due punti posti simmetricamente ai lati del centro lungo l’asse
maggiore. La distanza dei fuochi dal centro è tanto maggiore quanto maggiore è l’eccentricità;
in un’ellisse di eccentricità nulla (cerchio) i due fuochi vengono a coincidere nel centro.
Poiché il Sole non si trova al centro dell’orbita del pianeta, ma in uno dei fuochi, ne consegue
che la distanza Sole-pianeta varia nel corso della rivoluzione; il punto dell’orbita più vicino al
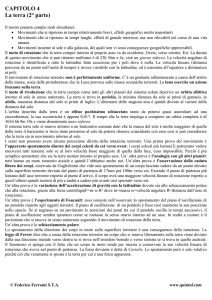
Sole si chiama perielio, quello più lontano afelio. La seconda legge di Keplero descrive la
velocità con cui i pianeti si muovono lungo la loro orbita, che non è costante ma cambia in
maniera tale che l’area spazzata dal segmento che congiunge il Sole al pianeta (raggio vettore)
descrive aree uguali in tempi uguali. Ad esempio nella figura l’area dei due settori ellittici AB-Sole e C-D-Sole è la stessa: perciò il pianeta percorre il tratto di orbita A-B nello stesso
tempo in cui percorre il tratto C-D. Una conseguenza immediata di questa legge è che la
velocità del pianeta lungo la propria orbita è tanto più grande quanto più esso è vicino al Sole;
in particolare la velocità è massima al perielio e minima all’afelio.
La terza legge di Keplero descrive una relazione tra le dimensioni dell’orbita dei pianeti (cioè
il semiasse maggiore delle rispettive ellissi) e il loro periodo orbitale. Si noti che questo
problema riguarda il confronto tra i periodi orbitali di pianeti distinti, che si muovono su orbite
di dimensioni diverse, e non ha nulla a che vedere con la seconda legge, che dice invece come
varia la velocità di un singolo pianeta in punti diversi della sua orbita. Facendo una tabella
delle dimensioni delle orbite e dei periodi di rivoluzione dei diversi pianeti del Sistema Solare
si vede chiaramente come il periodo orbitale aumenta al crescere della distanza dal Sole
(semiasse maggiore dell’orbita) anche se non esiste tra le due grandezze una relazione di
proporzionalità: ad esempio il semiasse maggiore dell’orbita di Giove è circa 5 volte maggiore
di quello della Terra, ma il suo periodo orbitale è quasi 12 volte maggiore.
Keplero ha scoperto (con la sua terza legge) che la relazione tra semiasse maggiore e periodo
orbitale coinvolge l’uso di potenze: il rapporto tra i quadrati dei periodi orbitali di due pianeti
è uguale al rapporto tra i cubi dei rispettivi semiassi maggiori. Nota: per chi conosce le
proprietà dei logaritmi, questa relazione appare come una retta di pendenza 2/3 su un grafico in
cui entrambi gli assi siano in scala logaritmica.
Come abbiamo detto, Keplero scoprì le sue tre leggi semplicemente per via sperimentale, cioè
osservando come i pianeti si muovono, senza tuttavia essere in grado di spiegare perché essi si
muovono così. La comprensione del motivo per cui i pianeti seguono le leggi di Keplero fu
un’impresa intellettuale importantissima che richiese quasi un secolo e che gettò le basi della
scienza occidentale come la conosciamo oggi. Le sue tappe principali furono la scoperta della
legge fondamentale della dinamica ad opera di Galileo e la scoperta della legge di gravitazione
universale da parte di Newton.
La prima tappa fondamentale fu la scoperta, fatta da Galileo, del fatto che le influenze esterne
(le forze) che agiscono sul movimento di un corpo non producono la sua velocità, ma solo una
variazione di velocità; detto in termini più precisi, la forza non è proporzionale alla velocità
ma alla accelerazione (variazione di velocità per unità di tempo). La nozione aristotelicoscolastica, accettata fino ai tempi di Galileo, che la velocità dipende direttamente dalla forza
deriva da osservazioni tratte dalle esperienze di ogni giorno (un oggetto si sposta fino a che lo
spingo; se cesso di spingerlo si ferma) che però si riferiscono a un mondo dominato dalle forze
d’attrito. Se si riesce a eliminare l’attrito, totalmente o parzialmente (per esempio studiando il
moto di biglie che rotolano su una superficie liscia) ci si accorge che i corpi lasciati a se stessi
tendono a mantenere una velocità costante (legge di inerzia), e che una forza è necessaria per
variare la loro velocità in qualsiasi modo (sia per accelerarli, sia per rallentarli o fermarli, sia
per deviarli).
Senza questo concetto fondamentale era impossibile anche semplicemente porsi le domande
corrette che permetterebbero di iniziare lo studio della dinamica dei pianeti. Infatti la
meccanica aristotelica porterebbe a cercare una forza che spinge i pianeti lungo la loro
traiettoria circolare, cioè una forza tangenziale; secondo la meccanica galileiana è invece
necessario cercare una forza che abbia l’effetto di deviare la traiettoria del pianeta, che di per
sé sarebbe rettilinea, facendola curvare verso il Sole, cioè una forza centripeta.
A Newton si deve la scoperta della forza attrattiva richiesta per mantenere il pianeta su
un’orbita ellittica. Newton scoprì che tutti i corpi si attraggono reciprocamente con una forza
proporzionale al prodotto delle loro masse e che diminuisce come il reciproco del quadrato
della loro distanza. Come la Terra attrae verso il suo centro tutti gli oggetti posti nelle sue
vicinanze, anche il Sole nello stesso modo attrae i pianeti. Sviluppando appositamente nuove
tecniche di calcolo estremamente raffinate (quello che oggi si chiama calcolo differenziale e
integrale) Newton riuscì a dimostrare che le tre leggi di Keplero erano una conseguenza
matematica inevitabile della legge della dinamica di Galileo e della legge di attrazione
universale.
Le leggi di Keplero valgono esattamente solo per un pianeta che sia soggetto solo
all’attrazione del Sole; questa condizione si verifica perfettamente solo per i sistemi binari
(composti da una stella e un pianeta o da due stelle). In realtà nel nostro Sistema Solare i
pianeti si attraggono reciprocamente tra di loro, anche se questa forza è molto più piccola
dell’attrazione solare (il pianeta più grande, Giove, ha una massa che è solo un millesimo di
quella del Sole). Questa piccola forza aggiuntiva all’attrazione solare produce delle piccole
perturbazioni alle orbite dei pianeti, che quindi seguono traiettorie che non sono più
esattamente ellissi o, detto in altri termini, sono ellissi che si deformano lentamente nel tempo.
In generale per effetto delle perturbazioni planetarie tutti i parametri che caratterizzano l’ellisse
(semiasse maggiore, eccentricità, inclinazione e giacitura del piano orbitale) variano nel
tempo. Ad esempio la linea degli apsidi (la linea immaginario che congiunge il Sole al
perielio, il punto dell’orbita più vicino al Sole) ruota lentamente nel tempo: per effetto delle
perturbazioni, l’orbita non è più una traiettoria chiusa.
Animazione che illustra schematicamente il movimento della linea degli apsidi si un pianeta
per effetto delle perturbazioni planetarie.
Grafico che illustra la variazione di eccentricità orbitale di uno dei pianeti principali per effetto
delle perturbazioni degli altri pianeti, su un periodo di 2 milioni di anni.
Grafico che illustra la variazione dell’inclinazione dell’orbita di uno dei pianeti principali per
effetto delle perturbazioni degli altri pianeti, su un periodo di 2 milioni di anni.
Capitolo 4: Il movimento di rotazione della Terra.
La dinamica del moto di rotazione di un corpo è soggetta a leggi che sono simili a quelle che
governano il moto di traslazione. La rotazione di un corpo è descrivibile per mezzo di una
quantità, chiamata momento angolare (oppure momento di quantità di moto), che molto
approssimativamente potrebbe essere descritta come la sua “quantità di rotazione”, oppure
anche la sua “inerzia rotazionale”, cioè la misura della sua tendenza a opporsi a cambiamenti
di velocità di rotazione. Il momento angolare è uguale al prodotto della velocità angolare di
rotazione per il momento di inerzia del corpo, che a sua volta è il prodotto della massa del
corpo per la distanza a cui la massa si trova rispetto all’asse di rotazione (questa definizione
vale per un corpo puntiforme; per un corpo composito il momento di inerzia è la somma dei
prodotti delle masse dei diversi elementi che lo compongono, ciascuna moltiplicata per la sua
distanza dall’asse di rotazione). Il momento di inerzia di un corpo è quindi una caratteristica
della sua struttura fisica, non del suo stato di moto.
La legge di inerzia per un corpo rotante prescrive che il momento angolare di un corpo non
soggetto a forze esterne non cambia (è costante nel tempo). Si noti che questo implica che la
velocità angolare di rotazione è costante solo se il momento di inerzia del corpo non cambia
(ad esempio per un corpo rigido). Se un corpo rotante, non soggetto a forze esterne, si contrae
(la distanza delle sue parti dal centro di rotazione diminuisce), la sua velocità di rotazione
aumenta per la conservazione del momento angolare.
Quando un corpo in rotazione è sottoposto a forze esterne, il suo momento angolare può
cambiare; questo effetto non dipende solo dall’intensità della forza, ma anche dalla sua
direzione e dal punto in cui è applicata. Una forza applicata direttamente sull’asse di rotazione
non ha alcun effetto sulla rotazione stessa (mentre naturalmente ha un effetto sul moto di
traslazione); anche una forza applicata in un punto esterno all’asse di rotazione ma diretta
verso l’asse stesso non ha alcun effetto. In definitiva ciò che provoca una variazione di
momento angolare non è la forza in sé ma il suo momento torcente, cioè il prodotto della
componente della forza ortogonale all’asse di rotazione per la distanza del punto di
applicazione dall’asse.
A volte la dinamica del moto di rotazione di un corpo non è intuitiva come quella del moto di
traslazione. Consideriamo ad esempio il comportamento di un rotatore simmetrico (trottola).
Se la trottola non fosse soggetta a forze esterne, il suo asse di rotazione sarebbe immobile e la
sua velocità di rotazione costante. In realtà sappiamo che l’asse di rotazione di una trottola si
muove secondo una traiettoria conica. Questo moto, chiamato di precessione, è dovuto alla
forza di attrazione terrestre verso il basso. In termini molto semplificati il meccanismo è
questo: la gravità tenderebbe a inclinare il corpo lateralmente, cioè a farlo ruotare secondo un
asse di rotazione orizzontale; questo cambiamento di momento angolare (orizzontale) si
somma al momento angolare posseduto dal corpo (inclinato rispetto alla verticale) producendo
uno spostamento laterale dell’asse di rotazione.
L’unica forza esterna in grado di influenzare la rotazione della Terra è l’attrazione
gravitazionale di altri corpi celesti, principalmente la Luna (perché è il più vicino) e il Sole
(perché ha la massa più grande). L’efficienza di una forza esterna nel provocare variazioni di
rotazione dipende strettamente dalla forma del corpo soggetto alla forza. Un corpo esattamente
sferico non avrebbe nessuna variazione di rotazione, perché ogni forza di attrazione esterna
che agisce su una sua parte sarebbe esattamente controbilanciata da una uguale forza agente su
un’altra parte uguale disposta simmetricamente rispetto all’asse di rotazione.
La Terra tuttavia non è una sfera perfetta: il suo raggio in direzione di uno dei poli è
leggermente inferiore al raggio equatoriale.
La forma della Terra è quindi quella di un ellissoide di rotazione, cioè una sfera leggermente
schiacciata ai poli che tuttavia mantiene una simmetria attorno al suo asse di rotazione. In altre
parole, l’equatore e tutti i paralleli sono cerchi perfetti; tutti i meridiani sono ellissi aventi il
semiasse maggiore più lungo del semiasse minore di circa 21 km. In termini più approssimativi
si parla di rigonfiamento equatoriale terrestre.
La particolare simmetria della forma della Terra (simmetria attorno all’asse di rotazione ma
non intorno a ogni altro asse non passante per i poli) fa sì che l’attrazione gravitazionale degli
altri astri non possa produrre nessun momento torcente parallelo all’asse di rotazione, ma solo
un momento torcente ortogonale ad esso. La Terra si trova cioè in una situazione analoga a
quella di una trottola e quindi è soggetta a un moto di precessione.
La precessione della Terra (chiamata lunisolare perché prodotta principalmente dall’attrazione
gravitazionale del Sole e della Luna) consiste in un movimento dell’asse di rotazione lungo
una traiettoria che ha la forma di un cono di apertura pari all’inclinazione dell’equatore sul
piano orbitale del Sole e della Luna (circa 23 gradi e mezzo). Questo movimento è molto
lento: un ciclo di precessione si svolge in circa 26 mila anni.
Per effetto della precessione la posizione del polo di rotazione si muove lungo una traiettoria
circolare sulla volta celeste. Il polo nord, che oggi si trova molto vicino alla Stella Polare (nella
costellazione dell’Orsa Minore), in passato è transitato attraverso costellazioni diverse.
L’attrazione dei corpi esterni (ad esempio della Luna) produce anche il fenomeno delle maree.
Poiché l’attrazione lunare è diretta verso il centro della Luna e diminuisce all’aumentare della
distanza da esso, essa ha una direzione e una intensità differente in punti diversi della Terra: ad
esempio è più forte nel punto della superficie terrestre posto immediatamente sotto la Luna e
più debole nel punto diametralmente opposto. Il valore medio dell’attrazione lunare
(corrispondente all’attrazione in un punto vicino al centro della Terra) è controbilanciato
esattamente dalla forza centrifuga generata dal moto orbitale del sistema Terra-Luna. Sulla
superficie terrestre la combinazione della forza centrifuga e dell’attrazione lunare diretta
danno una forza risultante (chiamata forza mareale) che, a seconda del punto considerato, è
diretta verso l’esterno o verso l’interno.
La forza mareale produce una deformazione della superficie terrestre che segue l’andamento
della direzione della forza stessa, cioè un rigonfiamento di forma ellittica (una specie di
“sigaro”) che ha il suo asse maggiore orientato nella direzione del corpo che produce la marea
(la Luna e il Sole). Il rigonfiamento mareale agisce sia sulla terra solida (che ha un certo grado
di elasticità e quindi è deformabile), sia soprattutto sulle masse liquide (oceani). Le maree
hanno una periodicità di circa 12 ore perché la superficie terrestre, nel corso della sua
rotazione giornaliera, incontra il rigonfiamento mareale in due posizioni antitetiche.
L’asse di rotazione terrestre si sposta non solo rispetto alle stelle fisse (precessione lunisolare)
ma anche rispetto alla superficie della Terra: il punto della superficie terrestre che corrisponde
al polo di rotazione non è fisso ma si muove. Questo movimento è molto piccolo (dell’ordine
di pochi metri) e provoca una leggera variazione della latitudine di tutti i punti della superficie
terrestre.
Fin dai tempi più antichi la velocità di rotazione della Terra è stata considerata costante, ed
anzi la lunghezza del giorno è stata assunta come riferimento per la misura dei tempi. In epoca
recente si è però osservato che anche la velocità di rotazione terrestre è soggetta a variazioni
per effetto delle quali la lunghezza del giorno cambia di quantità molto piccola, dell’ordine dei
millesimi di secondo. Come si è visto, a causa della simmetria di rotazione della forma
terrestre le perturbazioni gravitazionali esterne non possono causare alcuna variazione della
velocità di rotazione (solo cambiamenti nella direzione dell’asse di rotazione). Le variazioni
della lunghezza del giorno sono invece prodotte da due cause distinte: le ridistribuzioni di
masse sulla Terra e l’attrito mareale.
Per quanto riguarda la prima causa bisogna osservare che l’atmosfera e l’oceano sono in
continuo movimento, e in particolare esistono sistemi di circolazione dei venti che si muovono
parallelamente all’equatore con una velocità che varia a seconda della stagione. Questi sistemi
di circolazione posseggono quindi un proprio momento angolare variabile che viene
periodicamente scambiato con quello proprio della terra solida in modo da mantenere costante
il momento angolare totale del sistema terra+atmosfera. Un effetto analogo è prodotto da
sistemi stagionali di correnti oceaniche. Questi fenomeni hanno un andamento principalmente
stagionale ma sono abbastanza irregolari, e sono responsabili delle variazioni a corto periodo
(da pochi giorni fino ad alcuni anni) della lunghezza del giorno.
Se si osservano le variazioni della rotazione terrestre del giorno su tempi più lunghi (decenni o
secoli) si vede però che esiste anche una generale tendenza all’allungamento del giorno.
Il rallentamento progressivo della rotazione terrestre è dovuto principalmente all’attrito
prodotto dalle maree oceaniche. Poiché il fondo degli oceani non è liscio, il rigonfiamento
mareale non è allineato perfettamente con la direzione dei corpi che lo producono (Luna e
Sole), ma ha uno sfasamento dovuto al fatto che la Terra trascina per attrito la marea nella
direzione della sua rotazione.
L’attrazione gravitazionale tra la Luna e il rigonfiamento mareale così sfasato ha due effetti: da
un lato produce un rallentamento della rotazione terrestre (cioè un allungamento progressivo
della durata del giorno), dall’altro produce una forza che spinge la Luna nel senso del suo
moto orbitale, provocando il suo progressivo allontanamento dalla Terra. Il frenamento del
moto di rotazione causato dall’attrito mareale è il motivo per cui molti satelliti nel Sistema
Solare (tra cui la Luna stessa) rivolgono sempre la stessa faccia al pianeta attorno a cui sono in
orbita.