Lezione XIX
Il momento angolare di un punto materiale
1 dicembre 2014
1
Momento angolare rispetto a un polo fisso
Torniamo temporaneamente alla dinamica del punto materiale per esaminare un’altra importante conseguenza della seconda legge di Newton in un dato
sistema inerziale:
d~
p
F~ =
dt
(1)
dove F~ è la forza risultante agente sul punto materiale dato.
Fissiamo un punto O nello spazio, fermo rispetto al sistema inerziale scelto; lo chiamiamo polo, e per comodità lo prendiamo anche come origine delle
coordinate. Moltiplichiamo vettorialmente (v.appendice A) entrambi i membri
dell’equazione di Newton per il raggio vettore ~r(t) che descrive la posizione del
punto materiale:
~r × F~ = ~r ×
d~
p
dt
(2)
Il vettore
~τ ≡ ~r × F~
si chiama momento della forza F~ (agente sul punto materiale considerato)
ispetto al polo O.
Il vettore1
~ ≡ ~r × p~
L
definito in maniera del tutto analoga per la quantità di moto si chiama
momento della quantità di moto o momento angolare del punto materiale
rispetto al polo scelto.
È immediato vedere che il termine a destra dell’uguale nella 2 è proprio la
derivata rispetto al tempo del momento angolare. Infatti
~
dL
d
d~r
d~
p
= (~r × p~) =
× p~ + ~r ×
dt
dt
dt
dt
(3)
1 A rigore sia il momento della forza, definito sopra, sia il momento angolare sono pseudovettori, perché le loro componenti non cambiano di segno se si cambia il verso degli assi
coordinati cartesiani, contrariamente a quanto accade per esempio alle componenti del vettore
posizione o del vettore velocità
1
r
~ = ~v × m~v è nullo essendo il prodotto vettore di due
Ma il termine d~
dt × p
vettori paralleli.
Dunque la 2 si riscrive come
~
dL
(4)
dt
Il momento (rispetto a un polo fisso) della forza totale agente su un punto materiale è uguale alla derivata del momento angolare del punto materiale
rispetto allo stesso polo.
~τ =
1.1
Momenti assiali
Spesso (sarà quasi sempre il nostro caso) serve considerare solo una delle tre
componenti dell’equazione 4, per esempio la componente z: in quel caso sono
coinvolte solo le componenti z del momento della forza e del momento torcente:
τz = xFy − yFx
Lz = xpy − ypx = m(xẏ − y ẋ)
Le componenti z del momento angolare e del momento della forza rispetto
a un punto non dipendono dalle componenti z del vettore posizione, quindi
mantengono lo stesso valore se si sposta l’origine degli assi lungo l’asse z (giacché
questo cambierebbe appunto la componente z di ~r). In questo caso anziché
della componente z del momento (vettoriale) rispetto a un polo si parla spesso
di momento assiale (sia della forza, sia della quantità di moto) rispetto a un
asse, l’asse z nel nostro esempio.
I momenti assiali “vedono” solo le proiezioni dei vettori posizione,
velocità e forza sul piano perpendicolare all’asse considerato.
1.2
Momento torcente
Il momento di una forza è detto anche momento torcente.
Se il sistema in esame è un punto materiale, il momento torcente rispetto a
un punto è definito come
~τ = ~r × F~
Se si considerano solo le componenti dei momenti lungo una certa direzione (momento assiale), sono rilevanti solo le componenti di ~r e F~ nel piano
perpendicolare all’asse.
In questo caso le regole del prodotto vettore ci dicono che il momento assiale
sarà positivo o negativo (“uscente” o “entrante” nel piano perpendicolare all’asse considerato) in dipendenza dall’orientazione relativa tra ~r e F~ , secondo la
“regola della mano destra”. Più intuitivamente, il momento è uscente se la forza
tenderebbe a far ruotare il punto attorno all’asse in senso antiorario, entrante
in caso contrario. Il modulo del momento torcente – come si vede subito dalle
proprietà del prodotto vettoriale – è dato dal modulo della forza moltiplicato
per il cosiddetto braccio, rappresentato dalla distanza tra il polo (o l’asse nel
caso di momento assiale) e la retta diretta come la forza stessa e passante per
il punto materiale su cui agisce la forza (retta di applicazione della forza).
2
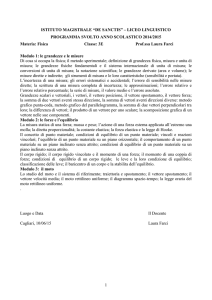
r
O
F
b
Figura 1: Il momento ~τ della forza F~ è perpendicolare al foglio (in direzione
‘uscente” nel caso rapppresentato) e vale in modulo F b dove b è il braccio della
forza. Più in generale, se stiamo considerando il momento assiale rispetto all’asse uscente dal foglio, valgono le stesse considerazioni fatte sopra, dove però
~r e F~ rappresentano le proiezioni del vettore posizione e della forza sul piano
perpendicolare all’asse considerato (per esempio sul piano (x, y) se consideriamo
i momenti assiali lungo l’asse z.
• Il pendolo semplice (la vendetta)
Il pendolo semplice è un esempio classico dell’utilità dell’equazione 4, che
permette di trascurare il contributo di forze a momento nullo, tipicamente
le forze di reazione.
Sul pendolo agiscono due forze: la gravità m~g e la tensione T~ . La seconda
non è nota a priori, ma ha la caratteristica di essere sempre diretta verso
il punto di sospensione. Se prendiamo questo come polo per calcolare i
momenti, T~ avrà dunque sempre momento nullo, e il momento della forza
totale coincide con quello della sola forza peso.
Per scrivere la 4 dobbiamo esprimere il momento angolare del pendolo in
maniera conveniente.
Innanzitutto notiamo che si tratta di un moto nel piano (che possiamo
chiamare x, y): i momenti sia delle forze sia della quantità di moto sono
quindi diretti lungo l’asse z.
La componente z del momento angolare del pendolo è Lz = xẏ − y ẋ.
Ricordiamo che, scrivendo x e y in funzione dell’angolo θ, abbiamo
x = ` sin θ
y = −` cos θ
3
ẋ = θ̇` cos θ
ẏ = θ̇` sin θ
da cui
Lz = m`2 θ̇ sin2 θ + m`2 θ̇ cos2 θ = m`2 θ̇
come si poteva facilmente calcolare anche “con la regola della mano destra”
sapendo che la velocità del moto circolare vale `θ̇ ed è diretta perpendicolarmente al raggio vettore, in direzione di θ crescente se θ̇ > 0.
L̇z = m`2 θ̈
Similmente, la componente z (l’unica diversa da zero) del momento delle
forza peso vale
τz = xFy − yFx = −mgx = −mg` sin θ
L’equazione 4 diventa quindi
−mg` sin θ = m`2 θ̈
cioè
g
θ̈ = − sin θ
`
che è la ormai ben nota equazione del moto del pendolo semplice.
1.3
Conservazione del momento angolare per forze centrali
Una conseguenza dell’equazione 4 è che il momento angolare di un punto materiale soggetto a una forza centrale, definita come abbiamo già visto da
F~ (~r) = f (r)r̂
si conserva durante il moto, dato che τ = ~r × F~ = f (r)(~r × r̂) = 0 essendo ~r
e r̂ paralleli.
Un esempio importante è la forza gravitazionale tra due corpi celesti. Nell’ipotesi in cui una delle due masse sia molto minore dell’altra (come nel caso dei
pianeti e del Sole) il centro di massa – che rimane fermo in un opportuno sistema
di riferimento inerziale – coincide con la posizione della massa più grande, che
possiamo scegliere come origine delle coordinate.
Abbiamo quindi che la forza agente sulla massa più piccola (il pianeta) vale
GM m
GM m
r̂ = −
~r
F~ = −
r2
r3
4
dove ~r è il vettore che descrive la posizione istantanea del pianeta. Si tratta di
una forza centrale, e dunque il momento angolare del pianeta rispetto all’origine
si conserva.
La prima implicazione della conservazione del momento angolare è che l’orbita giace sempre su un piano. Supponiamo infatti di scegliere l’asse x in modo
che la posizione ~r0 del pianeta al tempo t = 0 sia lungo l’asse x, e di scegliere
l’asse y in modo che la velocità ~v0 del pianeta al tempo t = 0 sia nel piano x, y
(è una scelta che si può fare sempre senza perdere di generalità).
L
r
O
v
~ determinato dalle condiFigura 2: La conservazione del momento angolare L,
zioni iniziali, fissa il piano su cui si trovano durante tutto il moto i vettori ~r e
~v .
~ 0 = ~r0 × m~v0 risulta quindi diretto come l’asse z:
Il vettore L
A un qualunque istante t i vettori ~r(t) e ~v (t) dovranno essere tali che ~r ×~v =
~ 0 /m ∀t, quindi entrambi perpendicolari all’asse z e cioè giacenti sul piano x, y.
L
Dunque tutta la traiettoria giace sul piano x, y.
Una seconda conseguenza è la costanza della velocità areolare nel moto dei
pianeti, nota come seconda legge di Keplero: il raggio vettore ~r(t) spazza
aree uguali in tempi uguali.
Figura 3: Seconda legge di Keplero per i moti planetari: gli intervalli di tempo
∆t durante i quali il raggio vettore spazza le aree (uguali) ∆A disegnate in
figura sono uguali.
Questo significa, passando al limite per intervalli infinitesimi, che la velocità
areolare dA
dt è costante.
5
dr
dr
rdθ r
r
dθ Figura 4: Il raggio vettore ~r agli istanti t e t+dt. L’area spazzata dA è uguale, a
meno di infinitesimi di ordine superiore, a quella del triangolo isoscele di altezza
r e base rdθ
Calcoliamo dA
dt usando le coordinate polari piane: nell’intervallo infinitesimo
dt il raggio vettore passa da ~r(t) a ~r(t + dt), e le sue coordinate r re θ diventano
rispettivamente r + dr e θ + dθ. L’area compresa tra i due vettori vale, a meno
di infinitesimi di ordine superiore,
dA =
1
1
r · rdθ = r2 dθ
2
2
La velocità areolare vale quindi
dA
1 dθ
1
= r2
= r2 θ̇
dt
2 dt
2
La componente z del momento angolare (l’unica non nulla) vale
L = mr2 θ̇
come si può vedere moltiplicando r = |~r| per la massa m e per la velocità
perpendicolare al raggio v⊥ = rθ̇, oppure usando la definizione per componenti
e ricordando che
x = r cos θ
y = r sin θ
da cui
ẋ = ṙ cos θ − rθ̇ sin θ
ẏ = ṙ sin θ + rθ̇ cos θ
e quindi
6
Lz = m(xẏ − y ẋ) = m(rṙ sin θ cos θ + r2 θ̇ cos2 θ − rṙ sin θ cos θ + r2 θ̇ sin2 θ)
cioè
dA
dt
La costanza del momento angolare implica dunque la costanza della velocità
areolare per il moto di un punto materiale soggetto a una forza centrale, e in
particolare nel moto dei pianeti intorno al Sole.
L = mr2 θ̇ = 2m
7
A
Il prodotto vettoriale
Il prodotto vettoriale è un’operazione tra vettori che ha come risultato un terzo
vettore (contrariamente al prodotto scalare).
Un modo per definirlo è per componenti:
(~a × ~b)x
(~a × ~b)y
= ay bz − az by
(~a × ~b)z
= ax by − ay bx
= az bx − ax bz
Dalla definizione per componenti si deduce immediatamente che il prodotto
vettoriale gode delle seguenti proprietà:
• anticommutatività: ~a × ~b = −~b × ~a, da cui discende che ~a × ~a = 0;
• distributività rispetto alla somma: (~a + ~b) × ~c = ~a × ~c + ~b × ~c;
• linearità rispetto alla moltiplicazione per una costante: (k~a) ×~b = k(~a ×~b)
Inoltre, con un po’ di noiosa algebra, si possono verificare le seguenti identità:
• triplo prodotto vettore:
~a × (~b × ~c) = ~b(~a · ~c) − ~c(~a · ~b)
da cui si deduce che per il prodotto vettore non vale la proprietà associativa: ~a × (~b × ~c) 6= (~a × ~b) × ~c
• triplo prodotto misto:
~a · (~b × ~c) = ~b · (~c × ~a) = ~c · (~a × ~b)
Il triplo prodotto misto è invariante per permutazioni cicliche dei tre
vettori coinvolti.
Inoltre
• se si cambia base in R3 ruotando gli assi cartesiani attorno all’origine, le
componenti di ~a × ~b cambiano con la stessa regola (la stessa matrice di
rotazione) delle componenti di ~a e ~b. Questo significa che ~a ×~b si comporta
come gli altri vettori in questo senso, e quindi che la sua orientazione
rispetto ad altri vettori non dipende dalla scelta degli assi – lo possiamo
immaginare saldamente “disegnato” nello spazio allo stesso modo in cui
immaginiamo ~a e ~b.
• ~a ×~b è perpendicolare sia a ~a, sia a ~b, come si può verificare dalla regola del
triplo prodotto vettore, o direttamente dalla definizione per componenti;
• il modulo del prodotto vettore è pari al prodotto dei moduli dei fattori
per il seno dell’angolo compreso:
|~a × ~b| = |~a||~b| sin α
come si può dimostrare con un po’ di algebra calcolando il modulo quadro
di ~a × ~b.
8
• il verso del prodotto vettore è dato dalla “regola della mano destra”: è
quindi uscente dal piano del foglio se per sovrapporsi a ~b il vettore ~a deve
compiere una rotazione antioraria di un angolo α.
Figura 5: Regola della mano destra per il prodotto vettoriale.
Quest’ultima proprietà, cosı̀ come le altre due, si verifica immediatamente
sfruttando la possibilità – garantitaci dal primo punto – di scegliere gli
assi cartesiani orientati arbitrariamente, senza perdere di generalità. Se
dunque prendiamo l’asse x nella direzione di ~a e l’asse y in modo che ~b sia
nel primo o secondo quadrante del piano (x, y), avremo
~a = (a, 0, 0),
~b = (b cos α, b sin α, 0)
dove α è l’angolo che il vettore ~b forma con l’asse x e quindi con ~a. Dalla
definizione per componenti abbiamo
~a × ~b = (0, 0, ab sin α)
Il vettore ~a × ~b è diretto come il versore ẑ e vale in modulo ab sin α.
• valgono le seguenti identità per i versori cartesiani:
x̂ × ŷ
= ẑ
ŷ × ẑ
= x̂
ẑ × x̂
= ŷ
9