II liceo scientifico
Meccanica newtoniana
Newton:
Philosophiae Naturalis Principia Mathematica
Christian Ferrari
Liceo di Locarno
Oggetto di studio della meccanica
La meccanica è lo studio del moto – e del riposo – di
sistemi materiali caratterizzati da osservabili
spazio–temporali.
La cinematica è la parte della meccanica che si occupa
dello studio dei moti (o movimenti) osservati
indipendentemente dalle cause che li provocano.
La dinamica s’interessa invece alle cause del moto.
I sistemi studiati dalla meccanica sono chiamati sistemi
meccanici e sono definiti come un insieme di punti
materiali sottomessi a delle forze.
Il punto materiale (PM) è una comoda astrazione per
descrivere il moto:
è un oggetto la cui quantità di materia resta costante,
resta identificabile durante il moto,
le sue dimensioni sono trascurabili se comparate alle
distanze percorse.
1
Struttura generale
L’osservatore per studiare un qualsiasi fenomeno fisico deve:
scegliere il sistema che desidera studiare;
scegliere delle osservabili;
possedere delle informazioni sul sistema ossia lo stato ad
ogni istante (e le proprietà del sistema);
Le grandezze che non cambiano durante l’evoluzione temporale,
non rientrano nella descrizione dello stato, sono dette
proprietà del sistema .
Per la meccanica ad esempio:
Sistema: una particella (PM) che si muove nello spazio.
Osservabili: posizione ~x (grandezza vettoriale), velocità ~v
(vettoriale), energia cinetica E cin (scalare), quantità di
moto p~ (vettoriale).
Stato: in cinematica (~x, ~v ), in dinamica (~x, p~);
Proprietà del sistema: massa m.
2
L’evoluzione temporale
3
Conosciuto lo stato ρ del sistema all’istante t0 e le
interazioni con l’esterno è possibile determinare in modo
unico lo stato per ogni t > t0 : è il principio del
determinismo.
ρ(t0 )
evoluzione temporale
−→
ρ(t)
Esempio in cinematica (MUA):
1
2
~x(t) = ~x0 + ~v0 (t − t0 ) + 2 ~a0 (t − t0 )
~v (t) = ~v0 + ~a0 (t − t0 )
~a(t) = ~a0
dove ρ(t0 ) = (~x0 , ~v0 ) con ~x0 = ~x(t0 ) e ~v0 = ~v (t0 ) e dove
~
F
è legata all’interazione con l’esterno.
~a0 = m
Spazio e tempo
L’esperienza mostra che:
spazio: continuo tridimensionale euclideo.
tempo: continuo unidimensionale orientato.
4
Sistemi di riferimento
Gli alberi a lato di una strada sembrano muoversi incontro
a chi guida ma appaiono fermi per l’autostoppista seduto
sul ciglio. Allo stesso modo il cruscotto della macchina è
fermo per l’autista ma è in moto per l’autostoppista.
La nozione di movimento è intrinsecamente legata a quella
di sistema di riferimento.
Per definizione un sistema di riferimento, notato R, è
un insieme di N punti (N ≥ 4), non complanari, le cui
distanze rispettive restano costanti.
La scelta del sistema di riferimento è quindi la prima cosa
da fare per lo studio della meccanica!
5
Punto coincidente e sistema di coordinate
R
Sia P un PM, ad ogni stante t ∈ I ⊂ esiste un punto Pt
fissato in R che coincide con il punto P del sistema a
questo istante.
Per definizione Pt è chiamato punto coincidente (con P
all’istante t).
È importante osservare che il punto P si sposta con il
variare del tempo t, mentre i punti coincidenti {Pt }t∈I in R
sono immobili rispetto ad R. Essi rappresentano dei punti
del sistema di riferimento che è uno spazio euclideo e
definiscono la traiettoria del PM.
Avendo scelto un sistema di riferimento R, si chiama
sistema di coordinate all’istante t una parametrizzazione
dei punti del sistema di riferimento per mezzo di tre numeri
reali (q1 , q2 , q3 ) a questo istante.
Non confondere le nozioni di sistema di riferimento e di
sistema di coordinate!
6
Sistema di coordinate cartesiane
Coordinate cartesiane (x1 , x2 , x3 ): sistema di assi
cartesiani diretto O123 fissato ad un sistema di riferimento
R, definito da un’origine O e tre assi ortogonali, orientati
in modo diretto. Possiamo reperire un punto P di R grazie
a (x1 , x2 , x3 ).
Al sistema di assi cartesiani diretto O123 si associa una
base ortonormata {~e1 , ~e2 , ~e3 } legata al punto O in modo
cosı̀ che per ogni vettore
w
~=
3
X
wi~ei
i=1
dove wi = w
~ · ~ei è chiamata componente di w
~ nella
direzione i.
7
Sistema di coordinate cartesiane
8
Il punto P può quindi essere reperito dal suo vettore luogo
3
X
−−
→
xi~ei
OP = ~x =
i=1
3
x3
P
O
x2
x1
1
R
2
Vettore posizione
9
Il vettore posizione del punto P all’istante t è
−−→
OPt = ~x(t)
le sue coordinate cartesiane {xi (t)}i=1,2,3 sono tali che
3
X
−−→
xi (t)~ei .
OPt = ~x(t) =
i=1
Pt
3
Pt0
~x(t)
~e3
~x(t0 )
O
~e1
1
2
~e2
R
Vettore velocità
10
Il vettore velocità (del punto P rispetto ad
t è
−−−−−→
Pt Pt+∆t
∆~x
~v (t) = lim
= lim
=
∆t→0
∆t→0 ∆t
∆t
~v (t) è un vettore legato al punto Pt tangente
traiettoria.
R
Pt
~x(t)
~e3
~v (t)
Pt+∆t
O
~e1
∆~x
~e2
~x(t + ∆t)
R) all’istante
d~x
.
dt
alla
Due moti semplici
Moto rettilineo uniforme (MRU) Il moto di un PM è
rettilineo ed uniforme se il vettore velocità è costante:
~v (t) = ~v0 . Un moto è rettilineo ed uniforme se e solo se
l’accelerazione è nulla: ~a = ~0; l’evoluzione temporale è data
da
(
~x(t) = ~x0 + ~v0 (t − t0 )
~v (t) = ~v0
Moto uniformemente accelerato (MUA) Il moto di
un PM è uniformemente accelerato se l’accelerazione è
costante: ~a(t) = ~a0 ; l’evoluzione temporale è data da
(
~x(t) = ~x0 + ~v0 (t − t0 ) + 12 ~a0 (t − t0 )2
~v (t) = ~v0 + ~a0 (t − t0 )
11
Primi concetti di meccanica (dinamica): massa
La massa intesa con come quantità di materia (notata
M ) è un concetto associato al numero di particelle in un
sistema, essa è direttamente proporzionale al volume V ed
il coefficiente di proporzionalità è la densità.
Per i sistemi omogenei si ha la relazione
M = ρV .
Questa definizione corrisponde a quella data da Newton
egli definisce la quantità di materia come la misura del
contenuto intrinseco di un corpo; è la prima definizione che
troviamo nei Principia
“La quantità di materia si misura con la densità e il
volume presi assieme”.
12
Primi concetti di meccanica (forza): forza
La forza è un’azione dell’esterno sul sistema, che conduce
o a una deformazione o a una modifica del moto. Essa è un
concetto indipendente dal sistema di riferimento e
matematicamente è una grandezza vettoriale.
Si nota F~ A→B la forza esercitata da A su B, e si
rappresenta come il vettore con origine in B.
Il dinamometro è l’apparecchio di misura per l’intensità
della forza, esso si basa sul principio che lo sforzo necessario
per allungare una molla aumenta con l’allungamento.
Questa ipotesi è giustificata se per il dinamometro vale la
legge di Hooke: per piccole deformazioni l’intensità della
forza F esercitata per deformare è direttamente
proporzionale all’allungamento ∆`
F = k∆`
dove k è chiamata costante elastica.
13
Massa inerziale
14
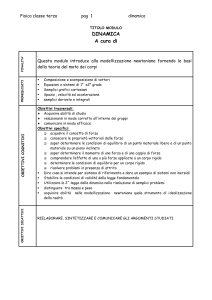
Carrellino su binario orizzontale trainato da dei pesetti
Relazione accelerazione - forza applicata
0, 06
0, 05
0, 04
F [N]0, 03
0, 02
0, 01
00
0, 05
0, 1
0, 15
a [m/s2 ]
Possiamo concludere che
F ∝a.
0, 2
0, 25
Massa inerziale
15
Introduciamo una nuova grandezza, caratteristica del
corpo, definita come il fattore di proporzionalità tra la
forza e l’accelerazione, che ci dice “quanto restio è il corpo
alla variazione di velocità”.
Questa costante è chiamata massa inerziale (notata m).
Quindi
~ = m~a
F
Poiché maggiore è la quantità di materia di un corpo più
difficile sarà accelerarlo
M ∝m
scegliendo in modo appropriato le unità di misura si ha
l’uguaglianza numerica
M =m.
È possibile misurare M tramite il rapporto F/a.
Quantità di moto
16
Un oggetto in movimento ha la possibilità di provocare il
movimento di un altro oggetto, cioè trasferirgli una parte
del suo movimento.
Scopo: associare a un corpo in movimento una grandezza
estensiva e conservata, che può essere trasferita durante un
urto.
Urto “elastico” tra due carrellini A e B (di sostanze
differenti). La massa di B è costante, quella di A è
modificata nel corso delle diverse esperienze.
A
00
~vA
0
~vA
A
B
0 =~
~vB
0
inizio
B ~v 00
B
fine
Quantità di moto
L’esperienza mostra che per ogni velocità iniziale di A c’è
un trasferimento integrale della “quantità di moto” se e
solo se mA = mB .
Per due carrellini A di stessa massa e stessa velocità, ma di
sostanze differenti si ottengono gli stessi risultati.
Quindi questa “quantità di moto” dipende solo dalla massa
e dalla velocità.
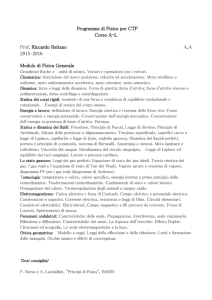
Caso A che si muove verso B = A fermo. Dopo l’urto A
resta agganciato a B e proseguono assieme. Misurando il
valore delle velocità iniziale e finale di A osserviamo che
esso è dimezzato.
17
Quantità di moto
18
0, 5
0, 4
v [m/s] 0, 3
0, 2
0, 1
0
4, 5
5
t [s]
5, 5
6
0 = 0, v 00 = v 00 e m = m .
Abbiamo vB
A
B
A
B
Abbiamo quindi
fine
inizio
z
}|
{
}|
{
z
est
0
0 cons
0
0
p(mA , vA ) + p(mB , vB ) = p(2mA , vA /2) = 2p(mA , vA /2) .
| {z }
=0
Quantità di moto
19
Possiamo ripetere l’esperimento con un corpo A che si
muove verso B = A ∪ A.
A
B
0
~vA
0 =~
~vB
0
inizio
mA
mB = (k − 1)mA
A∪B
~v 00
fine
mA∪B = kmA
Il valore della velocità si divide per tre come pure
l’intensità della quantità di moto.
Quindi in generale (k ∈ N∗ )
cons
est
0
0
0
p(mA , vA
) = p(kmA , vA
/k) = kp(mA , vA
/k)
Quantità di moto
20
Dall’uguaglianza
0
0
p(mA , vA
) = kp(mA , vA
/k)
possiamo concludere che se la velocità (di A) è divisa per
un fattore k allora anche la quantità di moto (di A) è divisa
per lo stesso fattore: l’intensità della quantità di moto è
dunque direttamente proporzionale al valore della velocità
p∝v
m = costante .
00 = v 0 /k)
Dall’uguaglianza (ponendo vA
A
00
00
p(kmA , vA
) = kp(mA , vA
)
possiamo concludere che se la massa (di A) è moltiplicata
per un fattore k allora anche la quantità di moto (di A) è
moltiplicata per lo stesso fattore: l’intensità della quantità
di moto è dunque direttamente proporzionale alla massa
p∝m
v = costante .
Questa conclusione può essere dedotta considerando due
Quantità di moto
21
Possiamo quindi concludere che l’intensità della quantità di
moto è direttamente proporzionale al prodotto mv e le
esperienze mostrano che il coefficiente di proporzionalità
vale 1, dunque
p = mv .
In conclusione la quantità di moto è la grandezza
estensiva, conservata, vettoriale data da
p = m~v
~
I legge di Newton
La I legge di Newton, o principio di inerzia afferma
(Principia):
“Ciascun corpo persevera nel proprio stato di quiete o di
moto rettilineo uniforme, salvo che sia costretto a mutare
quello stato da forze”.
Prima legge di Newton
La quantità di moto ~
p di un punto materiale resta costante
durante l’evoluzione temporale se e solo se la risultante
delle forze che agiscono su di lui è uguale a zero:
X
α
~α = ~0 =⇒ p~ = costante =⇒ ~v = costante
F
22
Sistemi di riferimento inerziali
23
La I legge non enuncia unicamente qualcosa sul moto dei
corpi, ma definisce pure quali sistemi di riferimento sono
ammissibili e possono essere utilizzati per descrivere la
meccanica.
Questi sistemi di riferimento particolari, chiamati sistemi
di riferimento inerziali , sono tali che rispetto ad essi
un corpo sufficientemente lontano da tutti gli altri (sistema
isolato) possiede un moto rettilineo ed uniforme.
R traiettoria
PM isolato
R0
traiettoria
PM isolato
PM isolato
~v (t) = ~at
~v (t) = ~v0
(a)
R00 traiettoria
(b)
(c)
Sistemi di riferimento inerziali
24
Tutti i sistemi di riferimento che hanno un MRU rispetto
ad un sistema di riferimento inerziale R sono anch’essi
sistemi di riferimento inerziali.
Infatti se ~v R è la velocità del corpo rispetto ad R e ~u è la
0
velocità di un sistema
ad R,
di riferimento R rispetto
0
allora la velocità ~v R0 del corpo rispetto ad R è
~v R0 = ~v R − ~u
R
R0
~v
~u
~v
R0
R
PM isolato
Sistemi di riferimento inerziali
In pratica in molti casi si sceglie un sistema di riferimento
“quasi inerziale”.
In prima approssimazione è possibile scegliere la Terra
(sistema di riferimento terrestre).
È possibile scegliere un sistema di riferimento “più
inerziale”, chiamato sistema di riferimento
geocentrico definito dal centro della Terra e tre stelle
molto lontane (stelle fisse).
Si può continuare cosı̀ e trovare dei sistemi di riferimento
“sempre più inerziali”.
Sperimentalmente un sistema di riferimento è inerziale se le
leggi di Newton sono verificate nel limite della precisione
degli apparecchi di misura a disposizione.
25
III legge di Newton
La III legge di Newton, anche conosciuta come principio
di azione-reazione afferma (Principia):
“L’azione è sempre uguale e contraria alla reazione: cioè le
mutue azioni di due corpi sono sempre uguali e dirette in
senso opposto”.
Terza legge di Newton
Se F~ 1→2 rappresenta la forza esercitata dal sistema 1 sul
sistema 2, allora
~ 2→1
F~ 1→2 = −F
26
III legge di Newton
27
“Se un cavallo tira una pietra legata ad una fune, il cavallo
– per cosı̀ dire – è ritratto dalla pietra con forza eguale:
perocchè la corda che li unisce e che è tesa fra di essi,
compie uno sforzo eguale per tirare la pietra verso il
cavallo, e il cavallo verso la pietra; e tanto impedisce il
progresso dell’uno, quanto promuove quello dell’altra”.
Σ
~s ~
F
~
Fatr
Fp
T~
T~ 0
F~
La pietra si sposterà se T~ è maggiore di F~atr . La reazione a
T~ , notata T~ 0 , è esercitata sul cavallo, non sulla pietra. Essa
non ha alcun effetto sul moto della pietra, però influenza il
moto del cavallo. Se il cavallo si sposta verso destra, ci
dev’essere una forza F~ (verso destra), esercitata dal terreno
sulle zampe del cavallo, la quale è maggiore di T~ 0 .
III legge di Newton
28
Le forze che agiscono su un sistema Σ e hanno origine
interamente nel sistema, sono chiamate forze interne
(notate F~ int ). Mentre le forze che hanno origine esterna al
sistema, sono chiamate forze esterne (notate F~ est ).
Terza legge di Newton (bis): Ad ogni istante, qualsiasi
sia il moto del sistema, la somma delle forze interne è nulla
X
α
~αint = ~0
F
II legge di Newton
29
Se Σ è isolato allora la sua quantità di moto non cambia,
essa cambia solo se vi è un’azione dall’esterno sul sistema.
La forza, come azione dall’esterno sul sistema che conduce
ad una modifica del moto, dovrà essere presa in
considerazione.
La II legge di Newton afferma (Principia):
“Il cambiamento di moto è proporzionale alla forza, ed
avviene lungo la linea retta secondo la quale la forza è stata
impressa”.
Seconda legge di Newton
Rispetto ad un sistema di riferimento inerziale, il tasso di
variazione della quantità di moto di un PM è uguale alla
risultante delle forze esterne agenti su di esso:
X
d~
p
F~αest
= F~ est =
dt
α
Equazioni dell’evoluzione temporale
Per determinare l’evoluzione temporale degli stati ,
ossia trovare delle equazioni che ci dicono come cambia lo
stato, in particolare come esso varia istantaneamente, serve
sapere qualcosa sul tasso di variazione delle osservabili ~x(t)
e ~p(t), ossia
d~x
d~
p
= ...
= ...
dt
dt
x
Dalla legge p~ = m~v = m d~
dt abbiamo
d~x
p
~
=
dt
m
Dalla II legge di Newton
d~
p
= F~ est
dt
30
Equazioni dell’evoluzione temporale
Le equazioni dell’evoluzione temporale dello stato
(~x, p~) del PM sono quindi
p~(t)
d~x
(t) =
dt
m
d~
p
(t) = F~ est (t)
dt
dato lo stato iniziale (~x0 , p~0 ) all’istante t0 , si avrà un’unica
soluzione (~x(t), p~(t)): determinismo.
Osservazione: Poiché vale
d~
p
d(m~v )
d~v
=
=m
= m~a
dt
dt
dt
si ottiene la formulazione semplice della seconda legge di
~ est .
Newton m~a = F
31
Massa gravitazionale
32
Si definisce la massa gravitazionale (notata m∗ ) di un
corpo comparandola, per mezzo di una bilancia a piatti ad
una massa di un cilindro in una lega di platino ed iridio
chiamato kilogrammo standard.
`
`
1111111111111111111
0000000000000000000
0000000000000000000
1111111111111111111
0000000000000000000
1111111111111111111
Le osservazioni di Galileo (caduta libera) e di Newton
(oscillazione dei pendoli) mostrano che la massa inerziale m
e la massa gravitazionale m∗ sono dei concetti equivalenti.
Se definiamo l’unità di misura della forza, ossia il Newton,
come 1 N = 1 kg · m/s2 possiamo porre
m = m∗
Principio di equivalenza.
Forza peso
33
Per definizione, la forza peso di un corpo è la forza
esercitata dalla Terra sul corpo sulla sua superficie o nelle
sue immediate vicinanze.
F~p = m∗~g
~g è il vettore campo gravitazionale la cui intensità vale
g = 9, 81 N/kg.
~g
Σ di massa m∗
~ Terra→Σ
F~p = F
Terra
Legge della gravitazione universale
34
Legge della gravitazione universale (1677)
Ogni punto materiale A esercita su un punto materiale B
una forza attrattiva, chiamata forza gravitazionale, della
forma
m∗ m∗ ~x
A→B
F~gr
= −G A 2B
,
k~xk k~xk
~x = ~xB − ~xA
k~xk = r
G = 6, 673 · 10−11 m3 /(kg · s2 ) è la costante della
gravitazione universale.
A
B
~x
A→B
F~gr
L’origine della forza di gravità nel fatto che gli oggetti
hanno una massa gravitazionale!
Come introdotta da Newton la forza di gravità agisce a
distanza nello spazio vuoto ed istantaneamente.
Campo gravitazionale
35
Per eliminare l’azione a distanza e istantanea si introduce il
concetto di campo: esso è il “mediatore” dell’interazione
gravitazionale.
Il campo gravitazionale generato da m∗A è definito da
~g =
~ A→B
F
gr
m∗B
dove m∗B è la massa di un corpo di prova.
Il campo gravitazionale esiste indipendentemente dal corpo
di prova, poiché traduce l’influsso gravitazionale di m∗A
sullo spazio circostante.
Forza elastica
Il concetto di forza elastica è assai generale (molle, cristallo
armonico, . . . ).
In generale una forza elastica ha la proprietà di essere
direttamente proporzionale al vettore posizione del sistema
e di verso opposto
F~el = −k~x
dove k è chiamata costante elastica ed è positiva (k > 0).
Un punto materiale la cui evoluzione temporale è
caratterizzata dalla forza elastica è chiamato oscillatore
armonico; il modello dell’oscillatore armonico può essere
considerato uno dei sistemi fisici più importanti.
36
Forza di attrito viscoso
37
L’attrito viscoso rappresenta l’azione esercitata da un
fluido su un solido, ed è un’azione che si oppone al
movimento del solido rispetto al fluido.
Solido che si muove su una retta con una velocità ~v in un
fluido immobile, la forza d’attrito viscoso è diretta nel verso
opposto a ~v
F~atr
Σ
v̂
~v
La forza di attrito viscoso è modellizzata da
~v
F~atr = −f (v)
= −λ v n v̂
k~v k
n varia con la velocità e λ > 0 è il coefficiente di attrito.
Forza di attrito viscoso
38
Si può misurare la forza di attrito misurando la forza
esterna che bisogna applicare al solido per mantenere la
velocità ~v costante
F~atr
F~ est
Σ
~v
v̂
Dall’equazione F~ = m~a, dove qui F~ = F~ est + F~atr ,
~ est = −F~atr .
deduciamo F
Forza di attrito viscoso
Basse velocità La forza di attrito è data dalla legge di
Stokes
F~atr = −kη vv̂ = −kη ~v
dove k è un coefficiente che dipende dalla geometria (sfera
di raggio R: k = 6πR); η è il coefficiente di viscosità
(grandezza caratteristica del fluido).
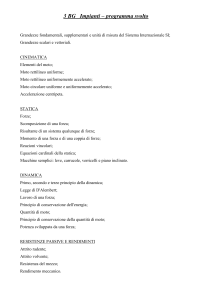
Velocità più elevate La forza di attrito è proporzionale
al quadrato della velocità:
F~atr = − 21 Cx ρfl Sv 2 v̂
dove ρfl è la densità del fluido, S la proiezione del solido su
un piano perpendicolare alla velocità e Cx un parametro
che dipende dalla forma del solido, chiamato coefficiente
di traino.
39
Forza di attrito viscoso
40
sfera
~v
proiezione della sfera su Π
Π
S
piano perpendicolare Π
Cx = 1.32
Cx = 0.45
Cx = 0.04
Forza di attrito viscoso
41
I due regimi si distinguono dal comportamento del fluido al
passaggio del solido:
se il fluido non presenta una perturbazione al passaggio del
solido si parla di regime laminare → legge di Stokes;
se il fluido presenta delle turbolenze al passaggio del solido
si parla di regime turbolento → la legge per velocità più
elevate.
La transizione tra i due regini è quantificata dal numero
di Reynolds Re definito nel modo seguente
Re =
ρfl d
v
η
dove d è un parametro geometrico del solido (sfera di
raggio R: d = 2R).
Regime laminare (basse velocità) Re < 1. Regime
turbolento (alte velocità) Re > 2400.
Forza di attrito radente
42
L’attrito radente rappresenta l’azione di una superficie
rigida su un solido, ed è un’azione che si oppone al
movimento del solido rispetto alla superficie.
~
N
F~atr
~
N
~
F~
Fatr
111111111111111111
000000000000000000
000000000000000000
111111111111111111
000000000000000000
111111111111111111
F~p
F~p
α
F~p,k
F~ S→Σ
~
N
F~p,⊥
~
α Fp
F~atr
La parte parallela alla superficie di F~ S→Σ è la forza di
~atr ;
attrito radente F
~.
quella perpendicolare è la forza di reazione normale N
Forza di attrito radente
43
Possiamo misurare la forza di attrito radente misurando la
forza esterna che bisogna applicare al solido per mantenere
la velocità costante. L’esperienza mostra che bisogna
trattare separatamente i casi ~v 6= ~0 e ~v = ~0.
Caso ~v 6= ~0 Vale la legge di Coulomb (attrito dinamico):
F~atr = −µc N v̂
µc > 0 è il coefficiente di attrito cinetico.
Caso ~v = ~0 Vale la legge di Coulomb (attrito statico):
Fatr ≤ Fatr,max = µs N
se ~v = ~0
µs > 0 è il coefficiente di attrito statico.
Fin tanto che l’intensità della forza esterna F~ est è inferiore
a Fatr,max , chiamata forza di strappo, il corpo resta
immobile.
Potenza e lavoro
44
Consideriamo una forza F~ che agisce su un PM dato dal
vettore posizione ~x e di velocità ~v
R
O
~x(t)
F~ (t)
α
~v (t)
La potenza sviluppata dalla forza F~ all’istante t è la
grandezza scalare definita da
~ · ~v = kF
~ kk~v k cos α =
P =F
3
X
i=1
dove α ∈ [0, π] è l’angolo tra F~ e ~v .
Fi vi
Potenza e lavoro
45
Il lavoro effettuato dalla forza F~ durante l’intervallo di
tempo (ti , tf ) è definito da
Z tf
PSfrag replacemen
P (t) dt
W (ti , tf ) =
ti
P (t)
ti
tf t
Se l’angolo α = π2 possiamo notare che, per le forze
perpendicolari alla velocità del loro punto di applicazione,
la potenza sviluppata è nulla.
Una forza è detta passiva se il lavoro durante
l’evoluzione temporale è nullo, una forza è detta attiva nel
caso contrario.
Potenza e lavoro
46
Caso particolare in cui F~ è costante
W (ti , tf ) = F~ · ∆~x = F~ · [~x(tf ) − ~x(ti )]
Caso unidimensionale con F~ = F1~e1 costante
F1 (x1 )
F1
W (ti , tf )
x1,i
x1,f x1
Caso unidimensionale in cui F~ dipende solo da ~x
F1 (x1 )
F1 (x1 )
W (ti , tf )
x1,i
x1,f x1
x1,i
x1,f x1
Energia cinetica
47
L’energia cinetica di un PM è la grandezza positiva,
scalare ed estensiva definita da
E cin = 21 mv 2
L’energia cinetica è un’osservabile, dato lo stato (~x, p~) si
ottiene
p2
E cin =
2m
Teorema dell’energia cinetica
La variazione di energia cinetica durante l’intervallo di
tempo (ti , tf ) è uguale alla somma del lavoro effettuato da
tutte le forze esterne ed interne:
∆E cin (ti , tf ) = W est (ti , tf ) + W int (ti , tf )
Forze conservative
48
Consideriamo due punti A e D, di vettore posizione ~xA e
~xD , e due possibili traiettorie γ e δ per andare da A a D
A
A
δ1
B
F~atr
γ
F~atr
F~atr
δ2
F~atr
F~
D
D
δ3
C
Forza d’attrito radente F~atr : W (γ) 6= W (δ)
W (δ) = W (δ1 ) + W (δ2 ) + W (δ3 ) = W (δ1 ) + W (γ) + W (δ3 )
= W (γ) + 2W (δ1 )
~ da A verso D: W (γ) = W (δ)
Forza costante F
W (δ) = W (δ1 ) + W (δ2 ) + W (δ3 ) = W (δ1 ) + W (γ) + W (δ3 )
= W (γ)
Forze conservative
49
Esistono delle forze per le quali il lavoro sviluppato non
dipende dalla traiettoria per andar da A a D, ma
unicamente dalla posizione iniziale e dalla posizione finale.
Una forza è detta conservativa se il lavoro che effettua
dipende unicamente dalla posizione iniziale ~xi e dalla
posizione finale ~xf e non dalla traiettoria specifica, ciò per
ogni possibile posizione iniziale e finale. Nel caso contrario
la forza è detta non conservativa.
Ecco una classificazione:
Nome
Forze costanti
Forza peso
Forza elastica
Forza d’attrito viscoso
Forza d’attrito radente
Forza F~
~
F
m∗~g
−k~x
−λ~v , −λv 2 v̂
−µN v̂
conservativa
sı̀
sı̀
sı̀
no
no
Energia potenziale
50
~ = F~ (~x) è possibile associare una
Per le forze conservative F
funzione E pot = E pot (~x) tale che il lavoro generato dalla
forza soddisfa la relazione
W (c) (ti , tf ) = −∆E pot (ti , tf )
La funzione E pot è chiamata energia potenziale associata
alla forza F~ .
L’energia potenziale è definita salvo una costante infatti
W (c) (con Ẽ pot ) = −∆Ẽ pot = −∆(E pot + C) = −∆E pot − |{z}
∆C
=0
= W
(c)
(con E
pot
).
Energia potenziale
51
Espressioni per l’energia potenziale di alcune forze
Forza costante F~
E pot (~x) = −F~ · ~x
Forza elastica F~ = −k~x
E pot (~x) =
1 2
kx .
2
F1 (x1 )
x1,i
x1,f
W (c)
x1
W (c) = 21 F1 (x1,f )(x1,f −x1,i ) = 21 (−kx1 )x1 = − 21 kx21 = − 21 kx2
W (c) = −∆E pot =⇒ − 21 kx2 = −(E pot (~x) − E pot (~0))
| {z }
=0
Energia meccanica
52
PM che subisce delle forze conservative (lavoro W (c) ), e
delle forze non conservative (lavoro W (nc) ).
Dal teorema dell’energia cinetica
∆E cin = W = W (c) + W (nc)
e, poiché W (c) = −∆E pot
∆E cin = −∆E pot + W (nc) =⇒ ∆(E cin + E pot ) = W (nc)
L’energia meccanica è definita da
E mec = E cin + E pot
Teorema dell’energia meccanica
La variazione di energia meccanica durante l’intervallo di
tempo (ti , tf ) è uguale alla somma del lavoro effettuato da
tutte le forze che non contribuiscono all’energia potenziale:
∆E mec (ti , tf ) = W (nc) (ti , tf )
Energia meccanica
53
Caso particolare:
Se tutte le forze attive sono conservative, l’energia
meccanica è costante durante l’evoluzione temporale:
E mec (t) = E mec (t0 )
In questo caso, la variazione di energia cinetica, durante
l’intervallo (ti , tf ), è l’opposto alla variazione di energia
potenziale
∆E cin = −∆E pot .
Urti
54
Si chiama urto ogni interazione tra due o più sistemi che si
effettua in un intervallo di tempo limitato: prima e dopo
l’urto le forze tra i vari sistemi sono trascurabili.
Nello studio degli urti ci si interessa unicamente allo stato
iniziale e allo stato finale e non al dettaglio dell’evoluzione
temporale, che durante l’urto può essere molto complessa.
I problemi tipici in cui intervengono gli urti sono le
collisioni (a, b) e le disintegrazioni (c) di un sistema in più
sottosistemi.
tf
ti
(a)
(b)
(c)
Urti
55
Se il sistema totale è isolato allora la quantità di moto
totale e l’energia totale sono delle costanti del moto.
La costanza dell’energia totale non corrisponde alla
costanza dell’energia cinetica, parte dell’energia cinetica
può essere convertita in altre forme di energia.
Abbiamo la seguente classificazione degli urti:
se ∆E cin = 0 allora l’urto è detto elastico;
se ∆E cin 6= 0 allora l’urto è detto anelastico;
se dopo l’urto la velocità dei sistemi è la stessa (e quindi i
sistemi proseguono attaccati) si parla di urto
completamente anelastico.
Per risolvere i problemi di urti in un sistema isolato si avrà
p~tot (ti ) = ~
ptot (tf )
e nel caso degli urti elastici
cin
cin
Etot
(ti ) = Etot
(tf )
dove se ti = 0 allora tf → ∞.