Giroscopio
Studio dei moti del giroscopio
Studio della precessione di un giroscopio. Studio della dipendenza della frequenza di precessione
dalla frequenza di rotazione e dalla distanza tra baricentro e polo.
Studio della nutazione di un giroscopio.
Misura dei momenti di inerzia rispetto agli assi principali del giroscopio: Iz, Ixy.
Misura della frequenza fn di un giroscopio appoggiato senza forze applicate, come funzione della
sua frequenza di rotazione fz.
Confronto dei risultati con la teoria: fn = fz Iz/Ixy
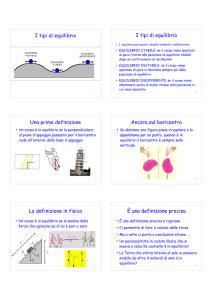
Giroscopio. Fotocellule per la misura delle frequenze di nutazione e precessione. Sistema di ACQ
Giroscopio. In alto si nota l’incisione circolare usata, come riferimento, per posizionare il baricentro del corpo in una
posizione voluta rispetto al centro di rotazione. Fotocellula per la misura della velocità angolare. PC asservito
all’esperimento attraverso il sistema di ACQ.
Rassegna delle equazioni del moto rotatorio:
EQUAZIONI
i = r i F i
est = i = (ri Fi)
li = r i p i
L = li = (ri pi)
DEFINIZIONI
Momento della forza Fi agente su una particella rispetto ad
un punto O
Momento risultante esterno agente su un sistema di
particelle rispetto ad un punto O.
Momento angolare di una particella rispetto a un punto O.
Momento angolare risultante di un sistema di particelle
rispetto a un punto O.
RELAZIONI
= dl / dt
Legge del moto per una particella sottoposta ad un
momento
Ε’ valida se e l sono misurati rispetto a un punto O fisso in
un sistema inerziale.
est = dL / dt
Legge del moto di un sistema di particelle sul quale agisce
un momento risultante esterno est
est e L sono misurati rispetto : (1) a qualsiasi punto O fisso
in un sistema inerziale; (2) rispetto al C.M. del sistema.
Caso particolare: corpo rigido in rotazione rispetto
ad un asse fisso in un sistema inerziale.
z = I z
z diretta lungo l’asse
I momento di inerzia rispetto allo stesso asse
z e’ la componente di est lungo lo stesso asse
Lz = I z
z e’ diretto lungo l’asse
Lz e’ la componente del momento angolare totale secondo lo
stesso asse. I: momento di inerzia rispetto allo stesso asse
L = I Se l'asse di rotazione ha una particolare simmetria (asse
principale) allora L e sono entrambi diretti lungo l’asse.
Ogni corpo rigido ha una terna di assi ortogonali per il
C.M. e attorno a ognuno di questi assi L e sono paralleli e
L = I Tali assi sono chiamati assi principali.
L = {I} In generale L e hanno direzioni diverse per assi che non
siano assi principali. Il momento angolare L non e’ il semplice
prodotto di una grandezza scalare I per la velocita’ angolare
{I}= Matrice di inerzia:Ixx = momento di inerzia rispetto all’asse x
I xx I xy I xz
I I yx I yy I yz
Lx = Ixx x + Ixy y + Ixz z
I zx I zy I zz
Supponiamo che il corpo ruoti attorno ad un asse principale d’inerzia in assenza di forze esterne
(compresa la forza peso): il corpo mantiene inalterato il suo moto di rotazione con velocità angolare
costante; per questa ragione gli assi principali d’inerzia vengono anche detti assi liberi di rotazione.
In generale , se un corpo non soggetto a vincoli viene posto in rotazione attorno ad una certa
direzione e poi lasciato libero (non soggetto a forze esterne) , il moto successivo non sara’ di
rotazione uniforme attorno a tale direzione ; se pero’ la direzione iniziale coincide con uno degli
assi principali d’inerzia, il moto successivo sara’ rotatorio uniforme attorno a tale asse. Il moto
presenta carattere di stabilita’ o instabilita’ a secondo dell’asse: e’ stabile la rotazione attorno
all’asse rispetto al quale il momento d’inerzia e’ massimo.
Il giroscopio
E’ costituito da un corpo rigido in rotazione rapida attorno ad un asse. In figura 1 e’ rappresentato
un giroscopio simmetrico (con sospensione cardanica) ruotante intorno ad un asse libero di massima
stabilita’.
Se il giroscopio e’ fermo, per mettere in rotazione l’apparecchio attorno agli assi y o z (ortogonali
all’asse x di rotazione) e’ sufficiente una coppia di forze di piccola intensita’; se il giroscopio e’
fermo e all’estremita’ dell’asse si appende un corpo, sotto l’azione del peso mg del corpo il
giroscopio si inclina ruotando attorno all’asse y. Le cose cambiano sostanzialmente se si pone il
giroscopio in rotazione su se stesso con velocita’ angolare elevata; adesso una spinta per
provocare una rotazione attorno all’asse y o a quello z non ha effetto apprezzabile e se si muove il
giroscopio in una stanza ruotando la base di appoggio dello stesso, l’asse del giroscopio mantiene
inalterata la sua direzione. (*)
Se si appende all’estremita’ dell’asse del giroscopio un corpo, il giroscopio non si inclina ma si
pone in rotazione lenta ed uniforme attorno all’asse verticale z (moto di precessione)
(*) La stabilita’ di orientamento dei giroscopi ha trovato molte applicazioni pratiche, per esempio
per assicurare la stabilita’ delle navi, per la stabilizzazione degli aerei, in vari strumenti utilizzati nei
missili, nel perfezionamento delle armi mediante la rigatura dei proiettili, responsabile, questa, di
una velocissima rotazione dei proiettili attorno al loro asse.
Figura 1.
Figura 2
Il giroscopio in uso nel laboratorio e’ costituito da una ruota a raggi, simmetrica attorno all’asse di
rotazione (z)Figura(2).Gli assi principali di inerzia, passanti per il C.M., sono tali che I xx =Iyy ≠ Iz
I momenti d’inerzia Ixx=Iyy≡Ixy sono detti momenti di inerzia equatoriali; il momento di inerzia Iz
e’ detto momento di inerzia assiale.
Studio della Precessione del giroscopio.(trottola)
Figura 3
Figura 4
La trottola ( Figura 3) ruota intorno all’asse principale di simmetria con velocita’ angolare :
L=I
Agiscono due forze: R reazione del vincolo in O verso l’alto;
mg forza peso applicata in B baricentro
I momenti risultanti delle forze rispetto al polo O risultano:
R = 0 ( R passa per O)
= b mg ( momento della forza peso)
L e’ parallelo a e b; e’ ortogonale a b e L
Vale la relazione : = dL/dt
La variazione di L nel tempo dt vale : dL = dt. (dL e’ parallelo a ed ortogonale ad L )
L e’ costante in modulo ma non in direzione .
I vettori , L, b ruotano attorno all’asse parallelo a (g) con una velocita’ p di precessione:
precessione di L.( Figura 4)
p viene definito mediante la relazione d ≡ p dt (vedi figura 4 ). Ossia : p = d /dt
|dL| = L sen d = L sen d p dt
(1)
| | = m g b sen ( – )= m g b sen
Essendo : dL/dt =
dL/dt = m g b sen dLm g b sen dt
(2)
Eguagliando la (1) e la (2)
L sen d p dt = m g b sen dt si ottiene:
p = (m g b) /L ed essendo:
L = I (il corpo ruota attorno ad un asse principale; si assume >>p )
si ottiene:
p = (m g b) /(I ). Essa ha direzione parallela ad mg.
La velocita’ angolare di precessione diminuisce all’aumentare della ed e’ direttamente
proporzionale a b .
Dalle relazioni: = m g b sen p = (m g b) /L =p L sen
L ;mge quindip da cui
p L .
Inoltre:
Il moto di precessione non e’ regolare ed è piu’ complesso. La traiettoria di
soggetta oltre alla precessione attorno a mg alla nutazione. Figura( 5)
(asse giroscopio) e’
Figura 5
In generale l’angolo non rimane costante, ma oscilla fra due valori fissi in modo che l’estremo di
L , mentre precede attorno a z, oscilli fra due cerchi C e C’ descrivendo la traiettoria indicata.
Questo moto oscillatorio dell’asse Zo e’ chiamato nutazione
La nutazione, al pari della precessione contribuisce al momento della quantita’ di moto L totale,
ma, in generale , il suo contributo e’ ancora piu’ piccolo di quello della precessione.
Studio del verso di rotazione di e p.
Per il giroscopio in uso nel laboratorio, vi e’ la possibilita’ di variare la posizione del baricentro G
rispetto al punto O di sospensione e rotazione. Cio’ si ottiene variando il punto in cui si fissa il
giroscopio all’asta che lo sostiene . Essa coincide con l’asse del giroscopio e una sua estremita’ , a
forma conica, costituisce il punto di appoggio e rotazione. Figura ( 6)
Nella situazione in cui G si trova sopra O ( b >0) il momento della forza peso e’ tale da provocare
una velocita’ di precessione che ha lo stesso verso della velocita’ di rotazione |p |> 0 (Fig. 6°)
Quando G si trova sotto O (b <0) la velocita’ di rotazione e quella di precessione hanno versi
opposti | p |< 0 (Fig 6).
In queste situazioni il momento delle forze applicate e’ ≠ 0; | L | = costante ma L ≠ cost e si ha la
precessione forzata.
Quando la posizione della ruota rispetto all’asta e’ tale che G ≡ O (b = 0) allora:
= 0; dL /dt= 0 e L = cost
In questo caso la precessione si annulla e si ha solo il fenomeno della nutazione (precessione libera)
L’asse di rotazione mantiene un’orientazione fissa nello spazio. (Fig 6 c)
Figure 6a, 6b, 6c
Esperienza 1. Studiare il moto di precessione: studiare il legame p ( b ,).
p = (m g b) /(I b / (m g /Irisulta che la frequenza p di
precessione, che e’ direttamente proporzionale alla distanza, b, del baricentro dal punto di appoggio
e inversamente proporzionale alla frequenza di rotazione del giroscopio, non dipende da
Dalla relazione
Si e’ supposto p <<
Viene misurata p in funzione di b e di .Viene inoltre determinato il momento di inerzia
assiale I del giroscopio (Esperimento 2). Viene studiato l’andamento del valore | p | in funzione
di b: | p | = f(b). Se tale andamento e’ lineare la pendenza della retta f(b) si deve confrontare
con il fattore(m g /I
In figura ( 8 ) viene rappresentato come variare e determinare la posizione del baricentro.
Sull’asta di sostegno e’ incisa una scanalatura ad anello che dista s0 dall’estremità superiore
dell’asta. Indichiamo con s la distanza fra l’estremita’ superiore dell’asta e l’anello superiore di
chiusura del supporto del giroscopio. Essa si può misurare con un calibro.
Se l’anello superiore di chiusura del supporto del giroscopio coincide esattamente con la scanalatura
ad anello, allora il giroscopio appoggia sul baricentro ( in fig. indicato con P). Se il punto di
appoggio e il baricentro coincidono, s =s0 , il giroscopio rimane in qualsiasi posizione senza
oscillare od orientarsi.
Note s0 e s un qualsiasi valore di b( in fig. indicato con d) si ottiene dalla : b = s0 –s.
Se il baricentro sta sopra il punto di appoggio, b > 0, se sta sotto b < 0, e il moto di precessione e’
rivolto in senso antiorario od orario.
In figura ( 7 ) e’ mostrata la disposizione sperimentale per lo studio della precessione.
Figura 7
Figura 8
La frequenza di rotazione e’ misurata mediante l’uso di un traguardo luminoso. Si misura la
frequenza d’interruzione f prodotta dai raggi del giroscopio sul traguardo luminoso. La ruota
contiene 18 raggi ed un giro corrisponde a 18 interruzioni del traguardo luminoso. Il numero di
interruzioni viene indicato con N ed e’ letto su un contatore digitale o sul monitor del PC asservito
all’esperimento. Pertanto:
= 2 f = 2 N /18 [ rad/s]
Si regola il valore di b desiderato . Si dispone il giroscopio verticale in modo che l’asse del
giroscopio tagli l’asse ottico del traguardo luminoso e interrompa il raggio luminoso. Si pone in
rotazione rapida il giroscopio con ripetute spinte sulla custodia del cuscinetto del giroscopio
( non piu’ di 3Hz). Si inclina l’asse del giroscopio e lo si lascia libero in modo che si instauri il
moto di precessione . Il periodo Tp ,di precessione, viene misurato mediante una seconda
fotocellula. Esso corrisponde al tempo che intercorre tra due interruzioni successive del raggio
luminoso da parte dell’asse del giroscopio.
Mentre la frequenza angolare del giroscopio diminuisce gradualmente , si misurano piu’ volte le
coppie di valori ( Tp, N ). Si deve porre attenzione a misurare contemporaneamente la frequenza di
precessione e la corrispondente frequenza di rotazione.
Il valore di p si ricava da : p = 2 /Tp [rad/s]
Per il valore di b impostato si ricavano diverse coppie di valori (p, ) i
Si ripete l’esperimento per diversi valori di b sia positivi che negativi.
Le distanze s0 e s si misurano mediante un calibro. b = s0 – s
Analisi dei dati.
-Studio del l’andamento del valore | p | in funzione di b: | p | = f(b)
Per ogni valore di b si determina il prodotto di valori corrispondenti di p e : |p |i
Si fa la media di tali valori e si calcola la deviazione standard della media.
Si riporta su un grafico tale valore in funzione del corrispettivo valore di b.
Si interpolano, mediante il MMQ, i dati con una retta del tipo y = A + B x
(y≡ valore medio |p |i ± ; x≡ b). Si effettua il test 2 per verificare se l’andamento e’ lineare .
Si ottengono i valori A±A e B±B.
Si misura la massa del giroscopio m ± m e il valore di Iz ±Iz.. Si ottiene il valore del fattore
(m g/ Iz) ±. L’errore e’ ottenuto propagando l’errore su m e Iz.
Si confronta, per esempio con un test normale, il valore della pendenza della retta B ±B .con il
valore del fattore (m g/ Iz) ±. I due valori devono essere compatibili in base alla relazione (1).
Si confronta, con apposito test, il valore A±A con lo 0. Se la retta non passa esattamente per lo 0
puo’ significare che il valore di s0 non e’ stato misurato correttamente ed i valori di b vanno corretti
della discrepanza tra A e lo 0.
-Studio dell’andamento del valore p in funzione di b .
Si sceglie un valore di b per il quale si e’ misurato un numero sufficiente di coppie di valori
(p, )i. Si riportano su un grafico i valori di pi in funzione di (1/i)
Si interpolano tali valori, mediante il MMQ , con una funzione del tipo y = A + B x (y≡pi ± ;
x≡1/i).
Si effettua il test 2 per verificare se l’andamento e’ lineare .
Si ottengono i valori A±A e B±B.
Si confronta, per esempio con un test normale, il valore della pendenza della retta B ±B. con il
fattore (m g b / Iz) ±. I due valori devono essere compatibili in base alla relazione (1).
Il giroscopio a causa degli attriti dei cuscinetti si dispone in verticale e l’angolo di precessione
diventa sempre piu’ piccolo. A causa di cio’ il giroscopio di tanto in tanto va inclinato di nuovo.
Esperimento 2)
Misura dei momenti di inerzia assiale ed equatoriale .
Misura del momento di inerzia assiale. (vedere anche monografia) Figura(9)
L’asse del giroscopio e’ mantenuto orizzontale
Figura 9
Fissare una massa m = 200g sul bordo interno della circonferenza del giroscopio. Sia R la distanza
tra il centro di massa di m e l’asse del giroscopio.
1. Determinare mediante metro a nastro e calibro la distanza del baricentro della massa m dall’asse
del giroscopio. R =( )
2. Misurare il raggio interno della ruota del giroscopio e le dimensioni delle masse m di forma
cilindrica
3. Posizionare l’asse del giroscopio in orizzontale
4. Porre la fotocellula in posizione tale da intercettare un raggio del giroscopio.
5. Determinare il periodo di oscillazione di questo pendolo, utilizzando il programma per la misura
del periodo di oscillazione (attivare la cartellina periodo presente sul Desktop; configurazione
T A1 , periodo T A1 (E) , campo misura 100, pendolo a bordi alterni )
Porre in oscillazione il giroscopio intorno al proprio asse. Spostarlo di poco rispetto alla distanza
fra i suoi raggi di modo che durante l’oscillazione solo un raggio intercetti la fotocellula.
Misurare il periodo di oscillazione. Il cronometro è predisposto per rilevare diverse misure di
periodo T per un tempo totale di 25 s.
(Avvertenze: analizzare se vi sono significative variazione dei periodi successivi che possano
indicare uno smorzamento del moto oscillatorio ed un aumento conseguente del periodo.
Scegliere di conseguenza i valori di Ti utili per la stima di T. Decidere se ripetere altre volte la
misura di T. Verificare se vi sono valori Ti molto discordanti: possono essere conteggi spuri
causati da disturbi elettrici, vanno scartati
Valutare il valore di T e l’errore su T
6. Misurare il valore della massa m (costituita dalle due masse cilindriche e dal nastro adesivo) con
la bilancia (errore sensibilità 1g.)
7. Misurati, T, m , R determinare Iz
Iz = mR[(gT2/4 2 ) - R]
Noti gli errori su m, R ,T propagare l’errore e trovare l’errore di Iz.
Determinazione della relazione : Iz = mR[(gT2/4 2 ) - R]
Il sistema giroscopio + massa m si può assimilare ad un pendolo fisico (Fig 9 b) che oscilla attorno
all’asse del giroscopio (asse z) e che rispetto a questo asse possiede un momento di inerzia:
I = Iz + m R2 . Il valore di I si può ottenere dalla misura del periodo di oscillazione T del pendolo.
L’equazione che governa il moto e’:
z = I ’’
z e’ la risultante dei momenti delle forze esterne rispetto al polo O
I e’ il momento di inerzia del giroscopio, piu’ la massa m aggiunta, rispetto all’asse z.
I = Iz + m R 2
Il momento delle forze di vincolo e’ nullo.
Il momento delle forze peso del giroscopio e’ nullo.
Il momento della forza peso mg vale in modulo mg R sen
L'equazione del moto diventa:
z = I ’’ ; mg R sen= I ’’ ( il momento della forza peso e’ un momento di richiamo)
I ’’ + mg R sen= 0 ; ’’ + mg R / I)sen= 0
Per piccole oscillazioni sen ≈
’’ + mg R / I) = 0
’’ + mg R) / (Iz + m R 2)] = 0
Posto 2 = mg R) / (Iz + m R 2)] = (2/T)
Si ottiene l’equazione di un moto armonico: ’’ + 2= 0
dove e T sono rispettivamente la pulsazione ed il periodo.
Dalle equazioni precedenti si ricava:
Iz + m R 2 = (mg R)/ 2 = (mg R)(T da cui:
Iz = - m R 2 + (mg R)(T
z = m R [(g T R
Misurati R, T, m e noti gli errori di tali grandezze si perviene al valore di I z
L’errore su Iz si ottiene propagando l’errore
Iz = (Iz/R)2 2R + (Iz/m)22m +(Iz/T)22 T
Misura del momento di inerzia equatoriale Jxy (vedi fig.monografia)
Figure: 10a, 10 b, 10 c
1. Determinare la massa M del giroscopio mediate la misura del peso F con un dinamometro
F = M * g M =( )
2. Regolare la distanza fra punto di appoggio e il baricentro al valore d = 50 mm, il baricentro (Fig
10°) risulta spostato di tale distanza d verso il basso rispetto al punto di appoggio. Usare il calibro
ventesimale
3. Appoggiare il giroscopio (vedi fig 10 b) all’asta di appoggio: la punta dell’asta di supporto
poggia nell’incavo dell’asta di sostegno.
4 Predisporre la forchetta della fotocellula in modo che l’asse del giroscopio (centro asta di
supporto), nella posizione di riposo, intercetti il raggio luminoso.
5. Attivare il programma per la misura del periodo di oscillazione (cartellina periodo presente sul
Desktop; configurazione T A1 , periodo T A1 (E) , campo misura 100, pendolo a bordi alterni ).
Il sistema è assimilabile ad un pendolo fisico, che può oscillare con periodo T attorno ad un
asse passante per il punto di appoggio, e che possiede rispetto a questo asse un momento di
inerzia I = Ixy + M d2 . Il momento di inerzia equatoriale Ixy si ottiene dalla misura del periodo di
oscillazione T.( Figura 10 c)
6. Misura di T.
Spostare l’asse del giroscopio di circa 10-20 e lasciarlo libero di oscillare. L’asse del
giroscopio (asta di supporto) intercetta il traguardo luminoso ad ogni periodo.
Determinare il periodo di oscillazione T (vedi sopra)
7. Misurati T , M, d determinare Ixy
2
2
Determinazione della relazione Ixy = M d [ ( g T /(4 ) – d]
L’equazione che governa il moto oscillatorio e’ :
xy = I ’’
xy e’ la risultante dei momenti delle forze esterne rispetto al polo O
Il baricentro del giroscopio e’ spostato verso il basso e si trova ad una distanza d al di sotto del
punto di appoggio O . Sia M la massa del giroscopio. Detto Ixy il momento di inerzia equatoriale,
il momento di inerzia I del sistema rispetto ad un asse passante per O , secondo la legge di Steiner,
assume il valore:
I = Ixy + M d 2
I momenti delle forze vincolari sono nulli.
Il momento della forza peso del giroscopio applicata in G ha modulo: M g d sen
xy = - M g d sen ( e’ un momento di richiamo) . Pertanto l’equazione del moto diventa:
I ’’ = - M g d sen
’’ + (M g d/ I) sen
Per piccole oscillazioni : sen ≈
’’ + (M g d/ I)
Posto 2= (M g d/ I)
’’ + 2 diventa l'equazione di un moto armonico di pulsazionee periodo
2= (M g d/ I) = (M g d)/ (Ixy + M d 2)
(Ixy + M d 2) = M g d /2= (M g d T 2)/(42)
Ixy = -M d2 + (M g d T 2)/(42) =
Ixy = M d [ ( g T2/(42) – d]
M isurati d, T, M e noti gli errori di tali grandezze si perviene al valore di Ixy
L’errore su Ixy si ottiene propagando l’errore
Ixy= (Ixy/M)2 2M + (Ixy/d)22d +(Ixy/T)22 T
Studio della nutazione del giroscopio
Misura della frequenza di nutazione fn.
Andamento di fn in funzione della frequenza di rotazione fz.
Verifica della relazione fn = fz (Jz/ Jxy)
Nutazione: derivazione della legge fn = fz (Jz/ Jxy)
In generale L = { I }
I xx
Dove I I yx
I zx
I xy
I yy
I zy
I xz
I yz
I zz
Se x,y,z sono assi principali di inerzia (solidali col corpo )
0
I xx 0
I 0 I yy 0
0
0 I zz
Nel caso del giroscopio impiegato Ix = Iy = Ixy ≠ Iz
I xy 0 0
I 0 I xy 0
0
0 I z
In quest’ultimo caso vale la relazione:
L = Ixy x i + Ixy y j + Iz z k
Aggiungendo e togliendo Ixy z k
Si ottiene
L = Ixy( x i + y j + z k) + ( Iz – Ixy) z k
Il termine ( x i + y j + z k) rappresenta
Dividiamo per Ixy
L/Ixy = + [(Iz – Ixy)/Ixy ] z k
Indichiamo con ' = [(Iz – Ixy)/Ixy ] z k vettore parallelo a k
Se = 0 ;
L = cost L/Ixy
rappresenta un vettore costante , ha le dimensioni di una velocità angolare.
Definiamo
L/Ixy ≡ N velocita’ di nutazione
N = ' e’ costante vettorialmente
Definiamo
= - ' = [(Ixy – Iz)/Ixy ] z k
N
Vedere le figure 11 a e 11 b.
o ( ') individuano un piano che ruota con velocita’ angolare N ( costante vettorialmente)
L e non coincidono . L’asse del giroscopio non rimane nella stessa posizione spaziale ma ruota
attorno alla direzione di L con velocita’ N
L, z o ) stanno in un piano che ruota con velocita’ angolare N attorno alla direzione di L
La componente della velocita’ angolare perpendicolare all’asse del corpo ( k) ruota con velocita’
angolare costante quindi il giroscopio oscilla con frequenza La componente z e' costante
|| = cost ed il vettore precede con velocita’ costante attorno all’asse di simmetria del corpo
(cono mobile del solido)
Se allora L | cost nel sistema riferito ad assi solidali col corpo.
Essendo alloraL e’ fisso nello spazio, la proiezione di su L e’ una costante e quindi
precede intorno ad L con velocita’ costante N (cono fisso dello spazio)
Quindi, nel caso di un corpo a simmetria assiale in assenza di forze esterne, il cono del solido rotola
senza slittare sul cono dello spazio (Figure 11 a e 11 b).
La direzione di e’ anche indicata come asse istantaneo di rotazione.
precede con velocita’ costante attorno all’asse di simmetria ( k) con velocita’ '
precede con velocita’ costante attorno a L con velocita’ N
Gli assi principali sono solidali col corpo.
Osserviamo il moto del giroscopio in un istante nel quale il sistema di coordinate , solidale con il
corpo , coincide col sistema del laboratorio. Scegliamo un istante nel quale L e sono nel piano (i,
k)
La scelta non e’ arbitraria poiché, data la simmetria del corpo rispetto all’asse z , al variare del
tempo si puo’ cambiare assi. Gli assi principali sono solidali con il corpo che ruota con (z k ) su se
stesso. Figura(11 c)
Figure 11 a, 11b, 11c
Ixy > Iz ; N >0 ; k
Ixy < Iz ; N <0 ; k
Dalla figura (11 c)
Lx = L sen
Ly = 0
Lz = L cos
x = N sen
Dalla relazione L = {I} w
Lx = Ixy x
Ly = Ixy y
Lz = Iz z
Combinando le due serie di equazioni si ottiene:
Lsen = Ixy x
Lcos = Iz z
L (x/N ) = Ixy x
L = Ixy N
L = Iz/(Ixy cos)
L = (Iz z )/ cos
xy(Iz wz )/ coszz /(Ixy cos
Detta fz la frequenza di rotazione ed fN quella di nutazione: z = 2 f z; N = 2 fN
fN = Iz/ (Ixy cos) f z
Se l’angolo e’ piccolo cos ≈ 1 e: fN = Iz/ (Ixy ) f z
Riportare su un grafico i valori di f N in funzione di fz con le barre di errore
Verificare se è valida la legge:
fN = fz (Iz/ Ixy)
Interpolare l’andamento fn(fz) con una retta fn = a + b fz (test χ 2 )
Ricavare i valori di a e b con errori
Ricavare il valore del rapporto Iz/Ixy con errore
Confrontare il valore del rapporto Iz/Ixy ed il valore di b (test normale)
Nota: L’equazione del moto dL/ dt = e' valida in un sistema di riferimento inerziale.
Nelle considerazione fatte sopra e’ stato utile definire i momenti di inerzia ad un sistema di assi
coordinati solidali col corpo che ruota, che e’ un sistema non inerziale .
Si puo’ trasformare un vettore da un sistema di riferimento inerziale ad uno non inerziale
(dL/ dt)I = (dL/ dt) + Λ L dove e’ la velocita’ angolare del sistema che ruota e tutte le altre
grandezze, che compaiono nel membro di destra, sono quelle osservate dal sistema di riferimento
rotante. Equazioni di EULERO.( per chi e’ interessato ad approfondire vedere ad es: Fisica di
Berkley pag 280)
Confronto riassuntivo tra Precessione e Nutazione ( Figure 12 a , 12 b)
Precessione:
Nutazione
Il baricentro non coincide con il punto di
Il baricentro coincide con il punto di appoggio:
appoggio:
il giroscopio e’ soggetto ad un momento delle
Il momento delle forze esterne e’ nullo.
forze esterne diverso da zero ( es: forza peso)
Il momento angolare L, , e l’asse del giroscopio
Per un asse principale L = I ; L ed
precedono attorno ad un asse parallelo a mg con
sono paralleli. ( asse di massima stabilita’).
velocità di precessione p
L e sono fissi nello spazio . Se si imprime
un impulso all’asse del giroscopio , si rompe
la simmetria e e l’asse del giroscopio
cominciano ad ruotare intorno alla direzione
di massima stabilita’ ( L) con frequenza fN
Il tutto come se il cono mobile (il cui asse è
l’asse del giroscopio) ruotasse
senza strisciare attorno a quello fisso (il cui
asse ha la direzione di L) con
asse istantaneo di rotazione
Nella prima figura è stato montato sul giroscopio un disco di cartone sulla cui superficie sono disegnati pallini neri su
fondo bianco. Questi sono tutti ben distinguibili poiché il disco è fermo rispetto all’osservatore.
Nella seconda figura invece il disco è in movimento e solo in una porzione del disco si possono osservare distintamente
i pallini. Ciò è dovuto al fatto che, in quel particolare istante, solo in questa zona essi sono fermi rispetto all’osservatore.
L’asse istantaneo di rotazione (coincidente con ω) passa infatti per il centro di questa zona.
Esperimento 3. Modo di operare
Figura 13
1. Predisporre il giroscopio in modo che il baricentro coincida con il punto di appoggio (punta
dell’asta di supporto): l’anello di riferimento inciso sull’ asta di appoggio e il bordo superiore
della custodia di fissaggio coincidono.
2. Appoggiare il giroscopio sul punto di appoggio (punta asta sostegno nell’incavo dell’asta di
appoggio).
3. In tale configurazione mettere il giroscopio in rotazione, inclinare l’asse del giroscopio e poi
lasciarlo libero: non si deve avere moto di precessione.
4. Attivare cartellina Nutazione
Predisporre i due traguardi luminosi A1 (T A1, campo misura 100 ) e A2 ( RB1) collegandoli
all’interfaccia CASSY.
[A1 misura il periodo di nutazione , A2 serve per misurare la frequenza di rotazione
individuando il numero di raggi intercettati al secondo]
5. Sistemare il traguardo A2 in modo che il raggio luminoso intercetti i raggi della ruota del
giroscopio, (quando un raggio della ruota intercetta il traguardo il LED sul traguardo si spegne)
6. Misura del periodo di nutazione Tn e della frequenza di rotazione fz.
- Tenere fisso l’asta di sostegno(asse giroscopio) con una mano e con l’altra porre in rotazione il
giroscopio applicando spinte ripetute sulle razze del giroscopio. Lasciare libero l’asse del
giroscopio e applicare contemporaneamente ad esso una leggera spinta laterale. Si instaura cosi
il moto di nutazione.
7. Spostare il supporto del traguardo A1 in modo che l’asta di sostegno del giroscopio (asse
giroscopio) intercetti il raggio luminoso del traguardo, (tangente).
Il raggio luminoso del traguardo viene intercettato nuovamente dopo ogni periodo di
nutazione T n.
Leggere sulla colonna R B1 la frequenza di rotazione del giroscopio n z: numero di raggi al
secondo intercettati dalla fotocellula. La frequenza di rotazione (numero di giri al secondo) è
determinata da fz = nz/18 ( la ruota ha 18 raggi e per ogni giro della ruota il traguardo viene
intercettato 18 volte).
- Contemporaneamente leggere il valore di T n.
Leggere sul monitor il valore di T n (colonna T A1/s)
La frequenza di rotazione, e quindi nz, rimane costante per un tempo sufficiente da permettere di
misurare valori di differenti periodi T in(nz). Porre però attenzione che le misure dei T in(nz)
avvengano mentre la lettura di n z si mantiene costante e leggere sempre le coppie di valori
(nz, T in).
Al decrescere della velocità di rotazione il valore di n z diminuisce ed è possibile misurare i
valori di T n per un nuovo valore di n z.
Ripetere le misure per diverse valori di n z a partire da nz = 40 con passo decrescente di circa 3.
Esempio nz =40 , 37 , 34, …, 15
Predisporre, prima di iniziare, una tabella dove riportare per ogni valore di n z : i diversi valori di
T in letti; il valore medio e la deviazione standard dei T in che stimano il valore e l’errore di T n.
(Avvertenza: controllare l’omogeneità dei valori di T in)
8. Riportare in tabella
nz [Hz] ±
Tn [ms] ±
fn = 1/ Tn [Hz]
±
fz [Hz]±
9. Riportare su un grafico i valori di f n in funzione di fz con le barre di errore
10.Verificare se è valida la legge:
fn = f z (Iz/ Ixy)
Interpolare l’andamento fn(fz) con una retta fn = a + b fz (test χ 2 )
Ricavare i valori di a e b con errori
11.Ricavare il valore del rapporto Iz/Ixy con errore
Confrontare il valore del rapporto Iz/Ixy ed il valore di b (test normale)
Andamento della frequenza di nutazione in funzione della frequenza di rotazione