Università degli Studi di Trieste
Dipartimento di Fisica
Corso di Studi in Fisica
Tesi di Laurea
Dal Paradosso EPR alla Disuguaglianza di
Bell
Laureando:
Francesco Paolo Rizzuto
Relatore:
Prof. Ennio Gozzi
Correlatore:
Prof. GianCarlo Ghirardi
ANNO ACCADEMICO 2014–2015
.
1
Indice
Introduzione
3
1
4
4
5
2
3
4
La non-separabilità della meccanica quantistica
1.1 Il paradosso di Einstein Podolsky Rosen . . . . . . . . . . . . . .
1.2 Ulteriori considerazioni sul paradosso EPR . . . . . . . . . . . .
L’approccio a variabili nascoste
7
La
3.1
3.2
3.3
3.4
3.5
meccanica bohmiana
L’equazione del moto . . . . . . . . . . . . . . . . . .
L’evoluzione deterministica . . . . . . . . . . . . . .
Introduzione alla probabilità . . . . . . . . . . . . . .
L’equivalenza con la meccanica quantistica ortodossa
L’esperimento della doppia fenditura . . . . . . . . .
La
4.1
4.2
4.3
disuguaglianza di Bell
14
Il principo di località di Bell . . . . . . . . . . . . . . . . . . . . . 14
Il Teorema di Bell . . . . . . . . . . . . . . . . . . . . . . . . . . 15
La struttura logica del ragionamento di Bell . . . . . . . . . . . . 19
5 Conclusioni
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
9
9
9
10
11
12
21
2
Introduzione
Fin da quando fu formulata, la meccanica quantistica, a causa del sue carattere
intrinsecamente probabilistico, fu guardata con sospetto da diversi scienziati e
filosofi. Il fatto che non si potesse più prevedere con certezza l’esito di una misura, come si era sempre fatto con la teoria elaborata da Newton, non venne mai
digerito da alcuni pensatori dell’epoca, i quali sostenevano che la meccanica dei
quanti fin ora elaborata fosse una teoria incompleta che doveva essere completata in senso deterministico. Tra questi pensatori, uno dei più illustri fu Albert
Einstein, il quale nell’articolo La descrizione quantistica della realtà fisica può
ritenersi completa? pubblicato nel 1935 scrisse:
In ogni teoria completa c’è almeno un elemento corrispondente ad ogni
elemento di realtà. Condizione sufficiente per la realtà di una quantità fisica è
la possibilità di predirla con certezza, senza disturbare il sistema. In meccanica
quantistica nel caso di due quantità fisiche, descritte da operatori non
commutanti, la conoscenza di una preclude la conoscenza dell’altra. Quindi o
(1) la descrizione della realtà data dalla funzione d’onda in meccanica
quantistica non è completa, oppure (2) queste due quantità non possono avere
realtà simultaneamente. Considerazioni relative al problema di fare predizioni
riguardanti un sistema sulla base di misure effettuate su un altro sistema che
aveva precedentemente interagito con esso conducono al risultato che se (1) è
falso allora anche (2) è falso. Si è quindi portati a concludere che la
descrizione della realtà data da una funzione d’onda non è completa.
Così si spalancarono le porte alle teorie delle variabili nascoste, infatti, in base
al ragionamento fatto da Einstein, devono evidentemente esistere delle ulteriori
variabili, che insieme al vettore di stato fornito dalla meccanica quantistica ortodossa, permettano di specificare completamente lo stato di un sistema fisico.
Tra i vari scienziati che lavorarono su queste teorie vi fu David Bohm. Quest’ultimo nel 1952 elaborò una teoria deterministica, capace di riprodurre gli stessi
risultati forniti dalla MQ.
A prima vista potrebbe sembrare che, grazie al fatto che si è riusciti ad elaborare
una teoria dei quanti deterministica, ogni difficoltà sia stata eliminata. Tuttavia, come si accorse lo stesso John Bell, anche in questa teoria sono presenti
caratteristiche nonlocali.
Quest’ultimo, tentò svolgere un lavoro analogo a quello di Bohm ma in un contesto locale, ma non vi riuscì. Dopo diversi fallimenti, ebbe la brillante idea di
ipotizzare che non fosse possibile estendere la MQ, o qualsiasi altra teoria equivalente ad essa, ad una teoria locale. Nel 1964, riuscì a dimostrare quanto aveva
ipotizzato e rese quindi evidente che caratteristiche nonlocali dovessero essere
presenti in ogni teoria capace di descrivere correttamente i processi naturali al
livello microscopico.
3
1
La non-separabilità della meccanica quantistica
La non-separabilità di un sistema quantistico è un’immediata conseguenza dei
principi generali della meccanica quantistica e comporta un radicale cambiamento circa l’idea usuale di un oggetto fisico come spazialmente localizzato.
Per questo motivo essa ha dato origine a non poche difficolà concettuali. Per
investigare questo problema in dettaglio conviene partire considerando un apparente paradosso elaborato da Einstein e dai suoi collaboratori Podolsky e
Rosen.
1.1
Il paradosso di Einstein Podolsky Rosen
Il Paradosso, noto anche come paradosso EPR, è un Gedankenexperiment che
cerca di mostrare come la meccanica quantistica sia essenzialmente una teoria
incompleta.
Le argomentazioni dei tre scienziati si basano sul fenomeno quantistico della non
separabilità (anche noto come fenomeno dell’entanglement), il quale consiste nel
fatto che se due o più sistemi fisici interagiscono tra loro possono perdere la loro
individualità anche se successivamente risultano separati spazialmente di un
qualsiasi ammontare.
Prendiamo in considerazione, ad esempio, due sistemi A e B che interagiscono
per un intervallo di tempo finito. Supponiamo che gli stati dei sistemi A e B,
prima dell’interazione, siano preparati in modo da essere descritti rispettivamente dai vettori |ϕi i + |ϕj i e |φi appartenenti agli spazi di Hilbert H (A) e
H (B) . Lo stato del sistema A + B, prima dell’interazione, è quindi descritto
dal vettore di stato (|ϕi i + |ϕj i) ⊗ |φi ∈ H (A) ⊗ H (B) . Supponiamo anche che
l’interazione tra gli stati |ϕi i e |ϕj i e lo stato |φi lo alterino, trasformandolo,
rispettivamente, nei due stati linearmente indipendenti, |φi i e |φk i.
Dopo l’interazione, per la linearità della legge di evoluzione si ha che:
(|ϕi i + |ϕj i)|φi −→ |ϕi i|φi i + |ϕk i|φk i
(1)
Prestando attenzione all’equazione (1) si può notare che dopo l’interazione, non
è più possibile associare un definito vettore di stato al sistema A e al sistema
B rispettivamente. Per essere più precisi teniamo conto del fatto che qualsiasi
stato quantistico è autostato di un’opportuna (di fatto di infinite) osservabile(i).
Per rifarci al nostro esempio, lo stato |ϕi i + |φi i del sistema A potrebbe essere
autostato di un’osservabile ΩA relativa all’autovalore ωi , mentre lo stato |φi del
sistema B potrebbe essere autostato di un’osservabile ΓB relativo all’autovalore
γj . La teoria ci consente quindi di asserire che il sistema A “possiede” la proprietà
ωi (nel preciso senso che, anche senza fare una misura si può asserire che se la
si facesse l’esito sarebbe certamente quello indicato). Analogamente la teoria ci
consente di asserire che il sistema B possiede la proprietà γj . Ma, nello stato
finale della (1), per l’indipendenza lineare degli stati che entrano in gioco non si
possono, in generale, fare asserzioni circa le proprietà oggettivamente possedute
dai sottosistemi, in quanto gli stati non sono autostati di un’osservabile relativi
a un dato autovalore. Addirittura, come vedremo considerando il caso di due
particelle di spin 1/2 nello stato di singoletto, tutte le osservabili “componenti
di spin” di ciascuno dei costituenti in qualsiasi direzione, hanno probabilità
4
uguali ed uguali a 1/2, di dare uno dei due possibili esiti. Queste considerazioni
implicano che non sia sempre possibile associare un vettore di stato ai due
costituenti di un sistema composto da essi che hanno interagito in passato o più
in generale agli stati del sistema composto che non risultano il prodotto diretto
di stati appartenenti ai rispettivi spazi di Hilbert.
Comunque è lecito chiedersi se non ci sia una descrizione alternativa dello stato
finale del sistema A + B che sia compatibile con l’attribuzione di un definito
set di proprietà fisiche ad entrambi i costituenti del sistema composto di A e B.
Se si tiene inoltre conto del fatto che il fenomeno dell’entanglement implica la
presenza di correlazioni a distanza tra le quantità fisiche osservabili dei sistemi
coinvolti, allora una descrizione alternativa non è più solo un’ipotesi ragionevole.
Essa sembrerebbe essere piuttosto, una conseguenza necessaria.
1.2
Ulteriori considerazioni sul paradosso EPR
Per comprendere meglio quanto esposto sopra consideriamo il seguente esempio:
Una particella di momento angolare totale uguale a zero decade, in onda S
(L2 = 0), in due particelle identiche di spin 1/2, che indicheremo rispettivamente
con A e B. Lo stato di spin delle particelle in esame deve quindi corrispondere
2
all’autovalore Stot
= 0, vale a dire è lo stato di singoletto. In uno stato siffatto,
la probabilità di ottenere 1/2 o −1/2 come risultato della misura dello spin
lungo una direzione arbitrariamente scelta n di una delle due particelle è 0.5.
Dunque, in base alle regole della meccanica quantistica, la componente di spin
di ciascuna delle due particelle risulta massimamente indeterminata e quindi,
tra l’altro, non è possibile prevedere a priori l’esito di qualsiasi misura di spin.
Supponiamo di effettuare ad un istante t (successivo al decadimento) una misura
dello spin di A e supponiamo di ottenere come risultato 1/2. A questo punto,
dato che il valore dello spin totale del sistema è zero e che il momento angolare
si conserva, possiamo essere sicuri di trovare la particella B in uno stato con
spin −1/2 lungo la direzione n.
Dunque il sistema B dopo che è stata compiuta una misura dello spin di A si
ritrova ad avere un ben definito valore dello spin. A partire da quanto sopra
sembrerebbe ragionevole supporre che lo spin della particella B fosse uguale a
−1/2 anche negli istanti precedenti a t.
In ogni modo, questa ipotesi, per quanto intuitiva, contraddice quanto previsto
dalle regole della meccanica quantistica. In base a queste ultime, infatti, il
risultato della misura dello spin della particella B prima dell’istante t è del
tutto indeterminato.
Si arriva quindi, all’inevitabile conclusione che una misura compiuta sulla particella A, per quanto le due particelle possano essere lontane, influenza le probabilità dei risultati di misure che dovessero eventualmente venir compiute sulla
particella B.
È rilevante osservare che il principio di separabilità anche noto come principio di
azione locale, secondo il quale se due sistemi durante un certo intervallo sono isolati meccanicamente, elettromagneticamente e termicamente, allora l’evoluzione
delle loro proprietà fisiche durante questo intervallo non può essere influenzata
da operazioni effettuate sull’altro sistema, deve essere abbandonato.
Le conseguenze sono di fatto le stesse ricavate mediante l’osservazione dell’equazione (1): A e B non possono in alcun modo, dopo l’interazione, essere
5
considerati come due sistemi con precise proprietà fisiche; devono quindi, almeno per quanto riguarda lo spin, essere considerati come un unico sistema (si noti
2
che di fatto, il sistema totale ha delle proprietà, vale a dire quella che Stot
= 0.
L’incompatibilità della meccanica quantistica con il principio di separabilià unitamente al fatto che essa fornisce una descrizione probabilistica (e non deterministica) della natura, conducono ragionevolmente all’idea che questa teoria
possa risultare incompleta.
Nei paragrafi seguenti analizzeremo la possiblità dell’esistenza di teorie che possano completare la meccanica quantistica fornendo una descrizione deterministica della realtà. In particolare analizzeremo in dettaglio quella che rappresenta
l’esempio paradigmatico di teorie siffatte: la meccanica bohmiana.
6
2
L’approccio a variabili nascoste
In meccanica quantistica lo stato di un sistema fisico, come mostrato precedentemente, è rappresentato da un vettore di stato, il quale codifica la probabilità con
la quale si può ottenere ciascuno dei possibili risultati di misura. Ne consegue
che i risultati di misura non sono in genere determinati (tranne nei casi in cui la
probabilità è uguale a 1 o uguale a 0). Inoltre, in accordo con l’interpretazione
della scuola di Copenhagen, il vettore di stato fornisce una descrizione completa
del sistema e questo implica che la natura è fondamentalmente probabilistica.
Tuttavia, fin dall’inizio dell’elaborazione della meccanica quantistica, non tutti
i fisici furono d’accordo con questa posizione. Alcuni scienziati, infatti, avanzarono l’ipotesi che potessero esserci descrizioni più complete di un sistema fisico
tali che i risultati di qualsiasi misura risultassero determinati dalla specificazione
dello stato dei sistemi quantistici. Di fatto, l’ipotesi che la meccanica quantistica
fosse una teoria incompleta fu avanzata prima che Einstein e i suoi collaboratori proponessero il loro paradosso. In altri termini, si provò a rispondere alla
seguente domanda: è possibile formulare una teoria, che riproduca esattamente
le predizioni della meccanica quantistica, tale per cui gli stati quantici si possano considerare come medie di stati per i risultati di tutte le possibili misure
risultino perfettamente determinate?
Per poter rispondere a questa domanda, si potrebbe descrivere lo stato quantistico non solo mediante uno stato vettore |ϕi ma anche aggiungendo ad esso
o sostituendolo con ulteriori variabili, di cui non si può conoscere il valore, per
questo chiamate nascoste. Va sottolineato il fatto che il valore delle variabili non può essere noto perché preparare un sistema in tale stato violerebbe le
previsioni della meccanica quantistica, per esempio, con riferimento al nostro
caso, potremmo avere una situazione nella quale, al tempo stesso, il quadrato
dello spin totale della coppia di particelle ha il valore zero, ma, ciononostante
ciascuna di esse ha valori definiti delle proprie componenti di spin.
Nel 1932 von Neumann elaborò un teorema mirato a dimostrare l’impossibilità di
teorie a variabili nascoste. Egli, infatti, pensò di poter dimostrare che l’esistenza
delle variabili nascoste non fosse riconciliabile con le previsioni della meccanica
quantistica. La dimostrazione di questo teorema parte dalla considerazione che,
sia in fisica classica che in meccanica quantistica, i valori medi delle quantità
osservabili soddisfano la richiesta di linearità:
Ogni combinazione lineare di due (quantità osservabili, e quindi in M.Q. di)
operatori Hermitiani
O = αP + βQ
che corrisponde a un’osservabile, è tale che il valore di aspettazione di < O > è
la stessa combinazione lineare dei valori di aspettazione delle osservabili di cui
O è la combinazione:
< O >= α < P > +β < Q > .
Il problema nasce dal fatto che von Neumann assume che lo stesso valga per i
valori certi che, in una teoria a variabili nascoste, vengono assunti dalle osservabili stesse. Non sarà difficile per il lettore rendersi conto che questa assunzione è
in contrasto con l’assunzione quantistica che gli esiti delle misure debbano coincidere con i relativi autovalori. Risulta banale, per esempio, considerare una
7
combinazione lineare delle componenti di spin di una particella che corrisponde
alla componente lungo una direzione appropriatamente scelta e, ciononostante
risulta impossibile, per la scelta fatta dei coefficienti della combinazione, che attribuendo alle componenti i valori +1/2 e -1/2 in qualsiasi modo si abbia ancora
uno di questi due valori per la combinazione lineare1 .
La questione si trasforma allora in un’altra: questa ipotesi a livello di variabili
nascoste deterministiche è logicamente necessaria? Ovviamente no, in quanto
essa equivale ad escludere ogni teoria a variabili nascoste e quindi l’argomento
non risulta significativo. Qualsiasi teoria a variabili nascoste deve violare la
richiesta di linearità fatta da von Neumann e il suo teorema risulta vuoto ed
irrilevante.
A causa di questo teorema per molto tempo si è ritenuto impossibile dare una
risposta positiva alla domanda posta precedentemente. Tuttavia l’assunzione di
linearità formulata da von Neumann non è fisicamente necessaria.
In conclusione, possiamo affermare che non vi è alcun ostacolo logico che posso indurci a crede che la meccanica quantistica non possa essere riformulata
deterministicamente.
1 Per
cogliere l’argomento cui si è fatto cenno prima, si pensi di considerare la combinazione:
r
1
3
σ · n = σx +
σy ,
(2)
2
4
la quale rappresenta la componente di spin nella direzione che ha gli indicati coseni direttori
rispetto agli assi x e y. È chiaro che assegnando in qualsiasi modo i valori +1 o -1 a σx e a
σy l’espressione a destra non può assumere i valori +1 o -1, che sono gli autovalori di σ · n.
8
3
La meccanica bohmiana
Un esempio di teoria a variabili nascoste, che fornisce una descrizione deterministica di un generico sistema quantistico, è la meccanica bohmiana. Nel
seguito di questo capitolo vedremo come si sviluppa questa teoria, analizzando
in particolar modo i punti di convergenza e di divergenza con l’interpretazione
ortodossa della meccanica dei quanti.
3.1
L’equazione del moto
Nell’interpretazione bohomiana della meccanica quantistica si assume che le
particelle quantistiche siano dei punti materiali, quindi occupano oggettivamente
una ben precisa posizione nello spazio R3 . D’altra parte, le variabili nascoste
di questa teoria sono proprio le coordinate della posizione. Dunque, anche se le
posizioni delle particelle sono perfettamente determinate, non siamo in grado,
in alcun modo di conoscerle2 .
In questo modello la traiettoria percorsa da una particella differisce da quella
classica poiché obbedisce alla seguente legge:
h
ψ ∗ ∇ψ
d~x(t)
= =( ∗ )
dt
m
ψ ψ
(3)
dove m rappresenta la massa della particella. ~x(t) è l’equazione della sua traiettoria, dunque è il vettore che ne identifica la posizione istante per istante. La funzione ψ è per definizione una funzione dello spazio di Hilbert H = L2 (R2 , C k ).
Essa inoltre soddisfa l’equazione di Schroedinger:
h ∂ψ
h2
= − ∇2 ψ + V ψ
(4)
m ∂t
m
Da un punto di vista matematico, ψ è, precisamente il vettore di stato della
teoria standard: è una funzione a quadrato sommabile che soddisfa l’equazione
(4) .
Tuttavia, nell’interpretazione di Bohm, ψ non rappresenta un’ampiezza di probabilità, ma assume piuttosto il ruolo di pilotare il moto della particella influenzando la sua traiettoria secondo la (3). Per questo motivo questa teoria è anche
chiamata teoria dell’onda pilota.
3.2
L’evoluzione deterministica
In questo paragrafo vogliamo mostrare che la meccanica bohmiana è una teoria
deterministica. Ciò significa che possiamo determinare le posizioni occupate da
una o più particelle in ogni istante, se supponiamo note all’istante iniziale, le
loro posizioni e la funzione d’onda ad esse associata.
Consideriamo, per semplificare la trattazione, una particella vincolata a muoversi lungo l’asse x. Supponiamo che il pacchetto d’onda associato alla particella
all’istante t0 = 0, sia della forma seguente:
x2
φ(x) = Ce(ikx− 2σ0 )
2 Si
(5)
potrebbe conoscere la posizione solo nel caso in cui la funzione d’onda associata alla
particella sia una delta di Dirac, ma una funzione d’onda di questo tipo è ovviamente un
idealizzazione che non può essere realizzata mediante alcuna procedura sperimentalmente .
9
Risolvendo l’equazione di Shroedinger per una particella libera, otteniamo:
φ(x, t) = Ce(ik(x−
(x−ut)2
ut
2 )− 2σ0 St
)
(6)
iht
Dove St = σ0 (1 + 2mσ
2 ), mentre u è la velocità di gruppo del pacchetto d’onda.
0
Se adesso, sostituiamo l’espressione seguente nella (3) otteniamo la velocità della
particella in funzione del tempo:
v(x, t) = u +
(u − xt)h2 t
(2mσσ0 )2
(7)
ht
2 1/2
Dove σ = σ0 [1 + ( 2mσ
2) ]
0
integrando la (7) otteniamo l’equazione del moto della particella:
x(t) = ut + x0 [1 + (
ht 2 1/2
) ]
2mσ02
(8)
quest’ultima equazione mostra che, almeno nel caso appena considerato, se conosciamo la posizione della particella all’istante iniziale (x0 ), siamo in grado di
determinarne l’intera evoluzione temporale.
3.3
Introduzione alla probabilità
Come visto nel paragrafo precedente, questa teoria permette di determinare la
traiettoria di una particella, purché siano note, ad un certo istante t0 la sua
posizione e la funzione d’onda ad essa associata.
D’altra parte la grossolanità degli strumenti, la presenza di rumore di fondo e
l’influenza inevitabile di fattori esterni non permettono di preparare il sistema
in uno stato iniziale perfettamente definito.
Quindi, se supponiamo di preparare, con un adeguata procedura sperimentale,
lo stato iniziale della particella, in modo da potere associare ad essa una funzione
d’onda ψ(~x, t0 ), al termine della fase preparatoria, la particella occuperà una
posizione perfettamente definita, ma impossibile da conoscere.
Di conseguenza, non potendo conoscere la posizione della particella all’istante
t0 , non possiamo, di fatto, determinarne l’evoluzione temporale.
Tuttavia, questa teoria permette almeno di conoscere con che probabilità la
particella occuperà una certa posizione all’istante t.
Infatti, il modello assume che, in un ensemble di particelle identicamente preparate per quanto riguarda il loro stato quantistico, la posizione iniziale segua
una certa distribuzione di probabilità p(~x, 0) nota. A partire da quest’ultima
possiamo ricavare la distribuzione di probabilità della posizione ad un istante
generico p(~x, t).
Per ricavare p(~x, t) dobbiamo per prima cosa osservare che è direttamente proporzionale alla denistà di particelle per unità di volume P (~x, t).
Quest’ultima deve soddisfare la relazione seguente:
Z
Z
d
P (~x, t)d3 x = −
vP (~x, t)da
(9)
dt V
A
poiché, la variazione temporale del numero delle particelle contenute nel volume V , deve essere uguale al numero di particelle che, nell’unità di tempo,
oltrepassano la frontiera di quest’ultimo.
10
Se adesso supponiamo che lo stato quantistico delle particelle sia descritto da
iS(~
x,t)
ϕ(~x, t) = A(~x, t)e h . Utilizzando la (3) ricaviamo che:
v=
∇S
m
Sostituendo quest’ultima espressione nella (9) ed applicando il teorema della
divergenza otteniamo:
Z
Z
d
∇S
3
P (~x, t)d x = −
∇(
P (~x, t))d3 x
(10)
dt V
m
V
Da cui segue che:
∂P (~x, t)
∇S
= −∇(
P (~x, t))
(11)
∂t
m
Se supponiamo di conoscere P (~x, 0), grazie all’equazione precedente, possiamo
dedurre il valore di P (~x, t) ad ogni instante, e questo, come mostreremo, coincide
con |ψ|2 .
In conclusione questa teoria, anche se non permette di conoscere la posizione
che occuperà la particella ad un certo istante t, permette comunque di ricavare
la probabilità di trovarla nella generica posizione ~x.
3.4
L’equivalenza con la meccanica quantistica ortodossa
Abbiamo visto che la Meccanica bohmiana, come la M.Q., fornisce una previsione probabilistica sui risultati di una misura.
Adesso mostreremo che, con queste due teorie, facendo le opportune ipotesi,
otteniamo le stesse previsioni.
Innanzitutto, facendo riferimento alla funzione d’onda ϕ(~x, t) introdotta nel
paragrafo precedente, osserviamo che |ϕ|2 = |A|2 soddisfa l’equazione (11).
Infatti:
∂A(~x, t)
i
∂S(~x, t)
∇2 φ = [
+ A(~x, t)
]
(12)
∂t
h
∂t
Sostituendo quest’ultima espressione nell’equazione di Schroedinger e prendendo
soltanto la parte immaginaria otteniamo:
∂A(~x, t)
1
+ ∇A∇S + A∇2 S = 0
∂t
2
(13)
∂|A(~x, t)|2
∇S
= −∇(
|A(~x, t)|2 )
∂t
m
(14)
Da cui segue che
Quindi le funzioni A2 (~x, t) e p(~x, t) soddisfano la stessa equazione di continuità.
Se inoltre imponiamo che esse debbano coincidere all’istante iniziale
|A|2 (~x, 0) = p(~x, 0)
allora coincideranno ad ogni istante successivo. Il che equivale a dire che, la distribuzione delle posizioni prevista dalla teoria dell’onda pilota riproduce esattamente quanto predetto dalla meccanica quantistica nella sua formulazione
11
standard. Inoltre, poiché tutte le misure di grandezze fisiche sono riconducibili
ad una misura di posizione, si riscontra un totale accordo tra questo modello
e la teoria standard, quando lo stesso esperimento è ripetuto su un insieme di
sistemi preparati nello stesso modo.
Per concludere è importante sottolineare che, anche se queste due teorie riproducono gli stessi risultati sperimentali, sono concettualmente molto differenti.
Infatti, la meccanica di Bohm parte dal presupposto che la particella occupi
oggettivamente una posizione, sia prima che dopo il processo di misura. Al contrario, nell’interpretazione ortodossa, prima che una misura sia stata effettuata,
la particella, in genere, si trova in una sovrapposizione di stati associati a diverse
posizioni.
3.5
L’esperimento della doppia fenditura
Al fine di osservare caratteristiche nonlocali presenti nella teoria formulata da
Bohm, in questo paragrafo, analizzeremo come viene interpretato l’esperimento
della doppia fenditura.
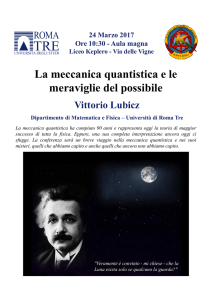
Per iniziare consideriamo la figura 1.
fig. 1
Supponiamo che la sorgente S sia sufficientemente debole da emettere non più
di una particella alla volta. Per semplificare la trattazione conviene considerare
in modo schematico i due casi seguenti:
1. CASO 1: La fenditura A è aperta, la fenditura B è chiusa
In questo primo caso il moto della particella dalla fenditura fino allo schermo sarà guidato da una funzione d’onda che assume valore non nullo solo
all’interno della fenditura aperta. Ad esempio, possiamo assumere che
abbia valore costante all’interno e si annulli all’esterno. Con questa assunzione la particella seguirà un traiettoria iperbolica, il cui vertice e la
cui convessità dipendono dalla posizione iniziale occupata, come mostrato
in figura 2.
12
fig. 2
Questo spiega perché, dopo aver fatto passare un numero sufficientemente
grande di particelle, sullo schermo si forma un pattern di diffrazione.
2. CASO 2: entrambe le fenditure sono aperte
In questo secondo caso, a differenza del precedente, la funzione d’onda
assume valore non nullo anche nella fenditura B. Per questo motivo la
particella seguirà una traiettoria del tipo mostrata in figura 3,
fig. 3
in accordo col fatto che le particelle si distribuisco sullo schermo formando
un pattern di interferenza come si vede in figura 4.
fig. 4
13
Bisogna sottolineare innanzitutto che nella descrizione di questo esperimento
fornita dalla meccanica bohmiana, la particella, essendo un punto materiale,
deve necessariamente passare per una delle due fenditure. Nel primo caso passa
sicuramente per la fenditura A. Nel secondo caso o passa per A o per B.
Tenendo in mente quanto appena detto, possiamo mettere a confronto la figura
2 con la figura 4. Da tale confronto deduciamo immediatamente che la traiettoria
seguita dalla particella che passa per A quando B è chiusa, è differente da quella
che segue quando B è aperta.
Questa osservazione mette in risalto la presenza, in questa teoria, di aspetti
nonlocali. Infatti quanto appena visto, viola il principio di azione locale di
cui abbiamo parlato nel secondo paragrafo del capitolo 1, poichè il moto della
particella è influenzato da operazioni compiute sulla fenditura che è un sistema
da essa isolato.
14
4
La disuguaglianza di Bell
Nel capitolo precedente abbiamo visto che la teoria dell’onda pilota ha il merito
di fornire un’interpretazione deterministica dei processi naturali a livello microscopico. Ma conserva caratteristiche nonlocali, che abbiamo visto essere presenti
anche nell’interpretazione ortodossa. Arrivati a questo punto, probabilmente, il
lettore si starà chiedendo se sia possibile incorporare la meccanica quantistica in
una teoria locale. Per poter dare una risposta esaustiva a questa domanda è necessario approfondire il concetto di località e quindi di teoria locale. Tratteremo
questo delicato argomento nel paragrafo seguente.
4.1
Il principo di località di Bell
In questo paragrafo vogliamo cercare di capire la definizione di teoria locale
elaborata da Bell.
Possiamo iniziare richiedendo che in una teoria locale se due sistemi sono isolati
per un certo intervallo di tempo, allora, durante tutta la durata dell’intervallo,
l’evoluzione delle proprietà fisiche del primo sistema non è influenzata da operazioni effettuate sul secondo sistema e viceversa. Ma come possiamo garantire che
due sistemi siano isolati? Per rispondere a questa domanda, dobbiamo considerare la teoria della relatività di Einstein, fino a toccare uno dei pilastri fondanti
della fisica: il principio di causalità. Supponiamo di osservare da un certo sistema di riferimento un evento A seguito da un evento B. Se questi due eventi
sono distanziati da un intervallo di tipo spazio, allora, mediante un opportuna
trasformazione di Lorentz, è possibile trovare un sistema di riferimento tale per
cui A si verifica dopo B. Quindi A e B, o in generale due eventi distanziati
da un intervallo di tipo spazio, non possono essere legati da un a relazione di
causa-effetto, poiché l’effetto, in nessun sistema di riferimento, può precedere la
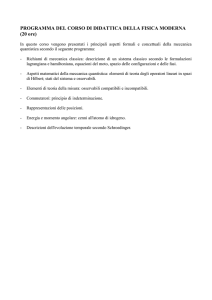
causa. Ritorniamo alla domanda precedente e focalizziamo la nostra attenzione
sui due sistemi che vogliamo isolare. Supponiamo che gli eventi di interesse
relativi al primo e al secondo sistema siano limitati alle regioni spaziotemporali
1 e 2, mostrate in figura 5.
fig. 5
Se vogliamo garantire che, durante un certo intervallo di tempo, il primo e il
secondo sistema siano isolati, allora dobbiamo assicurarci che tutte le operazioni
relative alla completa specificazione del sistema 1 avvengano nella regione spaziotemporale 3 (appositamente scelta al di fuori della sovrapposizione dei due
coni di luce), e fare altrettanto per il sistema 2. In questo modo siamo sicuri
che non vi può essere alcuna relazione di causa effetto tra gli eventi situati nella
regione 2 e le operazioni effettuate sul sistema 1 e viceversa.
15
Forti delle considerazioni appena fatte, possiamo comprendere le parole utilizzate da Bell per definire una teoria locale:
Una teoria si dice essere localmente causale se le probabilità relative a valori di
beables3 locali in una regione spaziotemporale 1 non sono alterate dalla
specificazione di valori di beables locali in una regione spaziotemporale 2
separata dalla prima da un intervallo di tipo spazio, quando ciò che accade nel
cono di luce retrostante la 1 è già sufficientemente specificato, ad esempio da
una specificazione completa di beables locali in una regione spaziotemporale 3.
È importante che la regione 3 sia completamente fuori dalla sovrapposizione
dei coni di luce retrostanti le regioni 1 e 2. Inoltre è importante che gli eventi
nella regione 3 siano specificati completamente. In caso contrario, le tracce
nella regione 2 di cause di eventi in 1 potrebbero benissimo completare
qualsiasi altra cosa che è stata utilizzata per calcolare le probabilità relative alla
regione 1. L’ipotesi è che le informazioni riguardanti la regione 2 diventino
superflue quando la 3 è specificata completamente.
Questa definizione è il punto da cui si parte per poter dimostrare il famoso
Teorema di Bell. Quest’ultimo è la risposta alla domanda che ci siamo posti ad
inizio capitolo, ovvero se sia possibile estendere la meccanica quantistica ad una
teoria locale.
4.2
Il Teorema di Bell
Bell elaborò questo teorema per mostrare che nessuna teoria locale può riprodurre le stesse previsioni della meccanica quantistica. Nella dimostrazione si
possono individuare due passaggi fondamentali:
• In primo luogo si ricava, partendo dalla definizione di teoria locale, una
disuguaglianza ( la disuguaglianza di Bell) che ogni teoria locale deve
soddisfare.
• Successivamente, si osserva che una teoria che riproduce gli stessi risultati
della meccanica quantistica non può soddisfare la disuguaglianza di Bell.
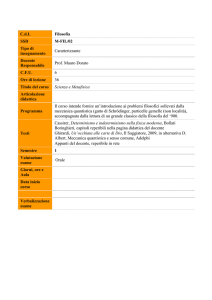
fig. 6
Iniziamo considerando il diagramma spaziotemporale di figura 6. Denotiamo
con A e B i risultati di una misura effettuata rispettivamente nella regione di
sinistra e di destra. Con a e b denotiamo delle variabili relative al settaggio
dell’esperimento che possono essere liberamente modificate da colui che effettua
la misura. Se, ad esempio, vogliamo misurare la componente di spin di una
particella lungo un certo asse, a (o b) rappresenta l’angolo tra questo asse ed
3 Con
il termine beables Bell intende parlare di entità corrispondenti a qualcosa di reale
16
un asse di riferimento. Infine denotiamo con c e λ le variabili che descrivono
il set-up sperimentale. c rappresenta ogni variabile ordinaria ammessa nella
M.Q. ortodossa, mentre con λ denotiamo le ipotetiche variabili nascoste, che
eventualmente servono per completare la meccanica quantistica. Supponiamo
che c e λ diano una specificazione completa degli eventi che si verificano nella
regione 3, e consideriamo la probabilità di ottenere dei particolari valori di A e
B:
P (A, B|a, b, c, λ)
Per le regole usuali della teoria della probabilità si ha che
P (A, B|a, b, c, λ) = P (A|B, a, b, c, λ)P (B|a, b, c, λ)
Tenendo conto della definizione di teoria locale data nel paragrafo precedente la
probabilità
P (A|B, a, b, c, λ)
non può dipendere da B e nemmeno da b. Analogamente la probabilità
P (B|a, b, c, λ)
non può dipendere da a. Infatti le due regioni mostrate nella figura precedente
sono separate da un intervallo di tipo spazio. Quindi non vi può essere nessuna
relazione causale tra gli eventi che si verificano nella prima e gli eventi che si
verificano nella seconda. Inoltre, poiché gli eventi necessari per la preparazione
dell’esperimento avvengono in una regione esterna alla sovrapposizione dei due
coni di luce, allora non vi può essere relazione di causa effetto tra le procedure
di preparazione relative alla prima regione e gli eventi che si verificano nella
seconda regione e viceversa. Da ciò segue che:
P (A, B|a, b, c, λ) = P (A|a, c, λ)P (B|b, c, λ).
(15)
Per poter ricavare la disuguaglianza di Bell, è necessario introdurre il valore di
aspettazione,
XX
E(a, b, c, λ) =
ABP (A, B|a, b, c, λ)
A
B
Dato che che λ, per definizione di variabile nascosta, non può essere conosciuta,
allora, evidentemente non si potrà ricavare nemmeno il valore di E(a, b, c, λ).
D’altra parte, possiamo supporre, come abbiamo fatto nel capitolo 4 per la teoria
di Bohm, che la procedura fisica corrispondente alla preparazione di uno stato
quantistico, porti le variabili nascoste a spargersi secondo una distribuzione
nota, tale da riprodurre le stesse previsioni statistiche fatte dalla meccanica
quantistica. Il che significa che la quantità effettivamente osservabile è la media
di E su λ
Z
E(a, b, c, λ)P (λ)dλ
(16)
e quest’ultima deve coincidere con quella prevista dalla M.Q.
Poiché c e λ si ripetono in tutte le espressioni seguenti, per semplicità li ometteremo dove possibile. Osserviamo che:
Z
|
[E(a, b, c, λ)−E(a, b0 , c, λ)]P (λ)dλ | + |
17
Z
[E(a0 , b, c, λ)−E(a0 , b0 , λ)]P (λ)dλ |≤
Z
(|E(a, b, c, λ) − E(a, b0 , c, λ)| + |E(a0 , b, c, λ) − E(a0 , b0 , c, λ)|)P (λ)dλ
(17)
supponendo che A e B possano assumere solo i valori 1 e −1 ed utilizzando la
(15) otteniamo che:
E(a, b, c, λ) = [P (1|a, c, λ) − P (−1|a, c, λ)][P (1|b, c, λ) − P (−1|b, c, λ)]
(18)
d’altra parte deve sicuramente valere che
[P (1|a, c, λ) − P (−1|a, c, λ)] = 1 − 2P (−1|a, c, λ)
Dato che P (−1|a, c, λ) assume valore tra 0 e 1, allora il valore assoluto dell’espressione precedente non può essere maggiore di 1. Da ciò segue immediatamente che
| E(a, b, c, λ)−E(a, b0 , c, λ) |≤| [P (1|b, c, λ)−P (−1|b, c, λ)]−[P (1|b0 , c, λ)−P (−1|b0 , c, λ)] | .
(19)
Ripetendo il ragionamento appena fatto otteniamo anche:
| E(a0 , b, c, λ) + E(a0 , b0 , c, λ) |≤| [P (1|b, c, λ)+
+P (−1|b), c, λ] − [P (1|b0 , c, λ) − P (−1|b0 , c, λ)] |
(20)
sommando la disuguaglianza (19) con la disuguaglianza (20) otteniamo
| E(a, b, c, λ) − E(a, b0 , c, λ) | + | E(a0 , b, c, λ)+
+E(a0 , b0 , c, λ) |≤ 2
(21)
infatti l’espressione
| [P (1|b, c, λ) + P (−1|b, c, λ)] − [P (1|b0 , c, λ) − P (−1|b0 , c, λ)] | +
| [P (1|b, c, λ) + P (−1|b, c, λ)] − [P (1|b0 , c, λ) − P (−1|b0 , c, λ)] |≤ 2
perché, come abbiamo visto precedentemente, i due termini di questa somma
sono minori o uguali a 1.
Se sostituiamo la disuguaglianza (21) nella (17) otteniamo la disuguaglianza di
Bell, nella versione di Clauser-Holt-Horne-Shimony:
Z
|
Z
0
[E(a, b, c, λ)−E(a, b , c, λ)]P (λ)dλ | + |
[E(a0 , b, c, λ)−E(a0 , b0 , c, λ)]P (λ)dλ |≤ 2
(22)
Bisogna enfatizzare che questa disuguaglianza, per come è stata ottenuta,
deve necessariamente essere sempre soddisfatta da ogni teoria locale.
Arrivati a questo punto, vogliamo mostrare che, in certi casi, le previsioni fornite
dalla meccanica quantistica, o da teorie equivalenti, violano la (22). Consideriamo, ad esempio, il caso, trattato nel capitolo 1, di una particella di momento
angolare totale uguale a zero che decade, in onda S, in due particelle identiche di
spin 1/2. Supponiamo di misurare la componente di spin della prima particella
18
lungo un asse che forma un angolo a, con l’asse z e di misurare la componente
di spin della seconda particella lungo un asse che forma un angolo b con lo stesso asse di riferimento. Per una teoria equivalente alla meccanica quantistica,
l’espressione
Z
E(a, b, c, λ)P (λ)dλ
(23)
essendo una quantità fisicamente osservabile, deve coincidere col valore di aspettazione previsto dalla teoria ortodossa. D’altra parte sappiamo che 4
EM Q (a, b, c) = − cos(a − b)
Quindi
Z
E(a, b, c, λ)P (λ)dλ = − cos(a − b)
Se adesso supponiamo di fare le misure con gli angoli a = 0◦ , a0 = 45◦ , b = 90◦
e b0 = 135◦ ricaviamo che:
Z
Z
| [E(a, b) − E(a, b0 )]P (λ)dλ | + | [E(a0 , b) − E(a0 , b0 )]P (λ)dλ |
√
=| − cos(45◦ ) + cos(135◦ ) | + | − cos(45◦ ) − cos(−45◦ ) |= 2 2 > 2
Come volevasi dimostrare, una teoria che riproduce gli stessi risultati della
M.Q. può violare, e in certi casi viola sicuramente, la disuguaglianza (22).
Grazie al Teorema di Bell siamo giunti all’importante conclusione che qualunque
teoria capace di riprodurre la distribuzione statistica, relativa agli esiti di misure,
prevista dalla meccanica quantistica non può essere locale. Si arriva, quindi,
all’inevitabile conclusione che le caratteristiche nonlocali di un microsistema non
dipendono dalla particolare teoria utilizzata, né dall’interpretazione adottata,
ma sono insite nella natura quantistica del sistema.
4 Infatti
EM Q (a, b, c) = P (1, 1, a, b) − P (1, −1, a, b) − P (−1, 1, a, b) + P (−1, −1, a, b)
mentre la probabilità di trovare le particelle con spin concorde o discorde è rispettivamente
P (1, 1, a, b) = P (−1, −1, a, b) =
a−b
1
sin2 (
)
2
2
P (1, −1, a, b) = P (−1, 1, a, b) =
a−b
1
cos2 (
)
2
2
Perché
P (1, 1, a, b) = | < a, b, +, +|ψsing > |2
=|
1
cos( a2 )
cos( 2b )
1
0
0
1 2
√
[
−
]|
1
1
0
sin( a2 )
sin( 2b )
2 0
a−b
1
= sin2 (
)
2
2
Da cui si ricava che
EM Q (a, b, c) = sin2 (
a−b
a−b
) − cos2 (
) = − cos(a − b)
2
2
19
4.3
La struttura logica del ragionamento di Bell
Al fine di chiarire maggiormente la posizione assunta da Bell per quanto concerne
la nonlocalià, conviene esplicitare la struttura logica del suo ragionamento.
Per prima cosa riassumiamo le ipotesi da cui parte la dimostrazione del teorema:
• Si considera una teoria generale tale che la specificazione massima dello stato di un sistema composto con costituenti distanti, determina univocamente la probabilità di tutti i possibili risultati di misure singole e
correlate;
• Lo stato è specificato da due tipi di variabili c e λ che sono rispettivamente accessibili e inaccessibili. Queste ultime seguono una distribuzione
di probabilità tale che la media di osservabili fatta sopra queste variabili
riproduca quanto previsto dalla M.Q.;
• Le due operazioni di misura sono scelte, eseguite e completate nelle regioni
A e B separate da un intervallo di tipo spazio.
• La specificazione dello stato iniziale, data da c e λ, fa riferimento ad una
superficie spaziotemporale che non comprende l’intersezione dei coni di
luce retrostanti la regione A e la regione B;
• alcuni parametri del settaggio sperimentale sono liberamente modificabili
dallo sperimentatore.
Per semplicità focalizziamo la nostra attenzione sullo stato di singoletto trattato
in precedenza. L’unica richiesta che dobbiamo fare è che la nostra teoria rispetti
il principio di località elaborato da Bell (che in seguito indicheremo con Loc-B).
Il che equivale a chiedere che la probabilità di fare una misura in una regione non
dipenda né dal setup sperimentale dell’altra regione (parameter independence),
né dall’esito che si ottiene in quest’ultima (outcome independence). In altri
termini:
Loc − B ←→ P (A, B|a, b; c, λ) = P (A|a; c, λ)P (B|b; c, λ)
(24)
Sappiamo che, nello stato di singoletto, non è possibile misurare gli stessi valori
di spin se la misura viene eseguita lungo la stessa direzione:
Z
ρ(λ)P (A, A|a, a, c, λ)dλ = 0 −→ P (A, A|a, a, c, λ)dλ = 0
(25)
Invocando il principio di località, si ha 5 :
P (A|a, ∗; c, λ)P (A|∗, a; c, λ) = 0
(26)
L’equazione precedente implica che
P (A|a, ∗; c, λ) = 0
oppure
P (A|∗, a; c, λ) = 0
5 Abbiamo aggiunto l’asterisco per indicare che la probabilità è calcolata supponendo che
non siano state fatte misure nell’altra regione.
20
D’altra parte
P (A|a, ∗; c, λ) = 0 −→ P (−A|a, ∗; c, λ) = 1
in modo analogo
P (A|∗, a; c, λ) = 0 −→ P (−A|∗, a; c, λ) = 1
abbiamo quindi provato che tutte le probabilità individuali assumono valore 1
o 0, il che equivale a dire che siamo arrivati al determinismo. Sostanzialmente,
il determinismo è una diretta conseguenza delle perfette correlazioni sperimentali, e della richiesta che venga rispettato il principio di località di Bell. Va
sottolineato quindi che il determinismo non viene assunto, ma dedotto.
Arrivati a questo punto, è facile ricavare, come abbiamo visto nel paragrafo precedente, la disuguaglianza di Bell e verificare che essa viene violata dai risultati
predetti dalla meccanica quantistica.
Il ragionamento complessivo può essere riassunto schematicamente nel seguente
modo:
{P erf ette correlazioni sperimentali} e Loc − B =⇒ Det
{Det} e {Loc − B} =⇒ {disuguaglianza di Bell}
{ Correlazioni Quantistiche} =⇒ ¬{Disuguaglianza di Bell}
¬{Disuguaglianza di Bell} =⇒ ¬{Det} o ¬{Loc − B}
¬{Det} =⇒ ¬{P erf etteCorrelazioniSperimentali} o¬{Loc − B}
Traendo le somme dalle inferenze precedenti:
{P rocessi N aturali} =⇒ ¬{Loc − B}
Il che significa che in natura, a livello microscopico, non vige il principio di
località di Bell.
21
5
Conclusioni
Il grande merito del lavoro di Bell è stato, non solo di aver dimostrato che la
natura è non localmente causale, ma anche di aver permesso di dare una risposta sperimentale a quella che sembrava essere una domanda metafisica. Infatti,
qualche anno dopo la pubblicazione del suo teorema, vennero realizzati numerosi
esperimenti che verificarono l’esistenza delle correlazioni quantistiche. Tuttavia
coloro i quali non si sentivano ancora disposti ad abbandonare il principio di
località di Bell, avanzarono alcuni dubbi sull’esito di questi esperimenti. Per
capire le loro obiezioni dobbiamo focalizzare la nostra attenzione sull’apparato sperimentale di uno di questi. Prendiamo ad esempio un esperimento che
coinvolge coppie di fotoni.
fig. 7
L’apparato sperimentale, mostrato in figura 7, comprende essenzialmente
una sorgente di fotoni in uno stato entangled, due collimatori, per selezionare
solo i fotoni che si propagano in un’opportuna direzione, due dispositivi che eseguono misure di polarizzazione6 e due rivelatori. Durante lo svolgersi dell’esperimento, l’orientazione delle lenti polarizzatrici viene scelta prima di eseguire la
rivelazione. Dunque, in linea di principio, si può ipotizzare che l’atto di orientare
una lente possa influenzare sia il processo di emissione dei fotoni, costringendoli
ad avere una polarizzazione ben precisa, sia le misure di rivelazione compiute
nel ramo opposto. Solo dopo l’esperimento realizzato nel 1982 da Alain Aspect,
questi dubbi si sciolsero del tutto. L’idea di fondo dell’esperimento di Aspect
consiste nello scegliere l’orientazione del polarizzatore solo all’ultimo minuto.
In questo modo nessun segnale che si propaga ad una velocità minore o uguale
di quella della luce può, partendo da una lente, raggiungere il fotone che si sta
muovendo nel ramo opposto. Anche questo esperimento ha verificato le previsioni quantistiche, confermando che l’ipotesi di un completamento locale della
teoria deve essere scartata, vale a dire che i processi naturali risultano essere
fondamentalmente nonlocali.
6 La proprietà di polarizzazione dei fotoni è analoga alla proprietà di spin delle altre
particelle
22
Riferimenti bibliografici
[1] John S. Bell, Speakable and Unspeakable on Quantum Mechanics,
Cambridge University Press, Cambridge, 1988.
[2] GianCarlo Ghirardi, Un occhiata alle carte di Dio, Il Saggiatore, Milano,
1997.
[3] Bernard d’Espagnat, Conceptual Foundation of Quantum Mechanics,
Addison Wesley, 1976.
[4] Peter Holland, The Quantum Mechanics Theory: an account of the de
Broglie-Bohm causal interpretation of Quantum Mechanics, Cambridge
University Press, Cambridge, 1993.
[5] David Bohm, Quantum Theory, Prentice Hall, New York, 1989.
[6] A. Einstein, B. Podolsky, N. Rosen, Can Quantum-Mechanical Description
of Physical Reality Be Considered Complete? , Physical Review 47, 777,
Marzo 1935.
[7] GianCarlo Ghirardi, John Stuart Bell: recollection of a great scientist and great man, (conferenza tenuta ad Erice il 4 novembre 2014, in
arxiv.org/abs/1411.1425).
LATEX.
23