P arte I
Fisica
Capitolo Unico
Fisica
1 Introduzione alla fisica
La Fisica è la scienza che studia, osserva e cerca di spiegare tutti i fenomeni che si verificano in
natura. L’accensione di una lampadina determinata dalla chiusura di un interruttore elettrico è un
fenomeno; si percepisce infatti la diversa illuminazione dell’ambiente (con il senso della vista), il
calore emanato dalla lampadina (con il senso del tatto), la diversa posizione del pulsante dell’interruttore elettrico (con il tatto, l’udito e la vista).
La fisica giustifica i fenomeni razionalmente; stabilisce cioè le leggi fisiche che li regolano e che
spiegano come e perché essi avvengono. La legge fisica è una relazione (normalmente data in forma analitica) tra le grandezze fisiche che intervengono nel fenomeno.
2 Sistemi di unità di misura
Per misurare una qualsiasi grandezza fisica è necessario disporre di un Sistema di Unità di misura
standard atto a garantire la riproducibilità dei risultati sperimentali.
• Grandezze fondamentali e grandezze derivate Un problema di notevole importanza in metrologia è la scelta dei sistemi di unità di misura nei quali vengono definite le unità di un numero limitato di grandezze fondamentali indipendenti tra loro
da cui vengono poi ricavate, in base a relazioni fisiche, le altre grandezze, dette derivate, nell’ambito a cui si intende riferito il sistema di unità considerato.
La distinzione tra grandezze fisiche fondamentali e derivate è del tutto arbitraria in quanto ogni
grandezza può essere considerata fondamentale o derivata a seconda che si faccia riferimento all’una
o all’altra relazione fisica.
Attualmente, in sede internazionale, la sperimentazione di nuovi metodi atti a migliorare la precisione con cui sono realizzati i campioni primari, i confronti internazionali, il coordinamento delle tecniche di misura adottate dai vari laboratori sono affidate al Bureau Internationale des Poids et Mesures (B.I.P.M). Tale organo è controllato dalla Conference Generale des Poids et Mesures (C.G.P.M.).
• Sistema internazionale (S.I.) Il Sistema Internazionale di unità di misura (S.I.) è stato introdotto nel 1960 dalla XI Conferenza Generale dei Pesi e Misure e perfezionato dalle Conferenze successive.
• Grandezze fondamentali
Il S.I. prevede 7 grandezze fondamentali e ne definisce le unità di misura.
577
Capitolo Unico
Grandezza
578
Fisica
Unità di misura
Definizione
Simbolo
Intervallo di tempo
secondo
durata di 9.192.631.770 periodi della radiazione corrispondente alla transizione tra i livelli iperfini dello stato
fondamentale dell’atomo di cesio -133
s
Lunghezza
metro
tragitto percorso dalla luce nel vuoto in un tempo di
1/299.792.458 di secondo
m
Massa
kilogrammo
massa del campione platino-iridio, conservato nel Museo
Internazionale di Pesi e Misure di Sèvres (Parigi)
kg
Temperatura
kelvin
valore corrispondente a 1/273,15 della temperatura termodinamica del punto triplo dell’acqua
K
Quantità di sostanza
mole
quantità di materia di una sostanza tale da contenere tante
particelle elementari quante ne contengono 0,012kg di
carbonio -12. Tale valore corrisponde al numero di Avogadro
mol
Intensità di corrente
elettrica
ampere
quantità di corrente che scorre all’interno di due fili paralleli e
rettilinei, di lunghezza infinita e sezione trascurabile, immersi
nel vuoto ad una distanza di un metro, induce in loro una forza
di attrazione o repulsione di 2·10-7N per ogni metro di lunghezza
A
Intensità luminosa
candela
intensità luminosa di una sorgente che emette una radiazione monocromatica con frequenza 540·1012Hz e intensità
energetica di 1/683W/sr
cd
3 Scalari e vettori
• Introduzione
Scalare:Grandezza fisica totalmente determinata da un numero.
Vettore: Grandezza fisica totalmente determinata da una lunghezza, da una direzione e da un verso.
Un vettore si indica con V o con V ed è rappresentato graficamente
da una freccia.
La lunghezza del vettore, detta anche modulo, si indica con V o V .
A
→
V
→
V;
0
V
• Versori
Un versore è un vettore avente lunghezza unitaria.
In figura è indicato il versore u del vettore V:
V = V u = Vu
A
→
V
→
u
0
1
V
Parte I
Fisica
Libro X
Discipline scientifiche
• Vettore opposto
Il vettore opposto di un vettore è un vettore avente lo stesso modulo e la stessa direzione del vettore dato
ma verso opposto.
• Somma di vettori
Dati due vettori A e B la
loro
somma R è un vettore i cui parametri (modulo, direzione e verso)
dipendono da quelli di A e B ma non sono la loro somma.
• Metodo del parallelogramma
La somma di due vettori è rappresentata dalla diagonale maggiore del parallelogramma costruito sui due vettori.
→
→
B
B
→
→
→
→
+B
R =A
→
A
A
• Differenza di vettori
Come la somma anche la differenza D tra due
A e B è un vettore i cui parametri (modulo,
vettori
direzione e verso) dipendono da quelli di A e B ma non sono la loro differenza.
In particolare se:
A= A;B= B;D= D
a parte il caso in cui i vettori A e B e sono paralleli non vale la relazione:
D = A–B
• Metodo del parallelogramma
La differenza di due vettori è rappresentata dalla diagonale minore del parallelogramma costruito sui due vettori.
→
→
→
→
→
→
D =A –B
B
B
→
A
A
• Scomposizione di un vettore
Così come, dati due vettori è possibile calcolarne la somma, è sempre possibile pensare ad un vettore come la somma di due vettori qualsiasi.
Dato un sistema di assi cartesiani, è possibile supporre un qualsiasi vettore V come il risultato della somma delle componenti sugli assi xy.
Introducendo i versori i e j degli assi cartesiani:
y
→
Vy
V
→
j
→
V = Vx i + Vy j
V = Vx2 + Vy2
i Vx
x
579
Capitolo Unico
Fisica
• Prodotto scalare o prodotto interno
• Prodotto vettoriale o prodotto esterno
→
A
B→
Due vettori applicati allo stesso punto individuano un parallelogramma di lati corrispondenti ai moduli dei due vettori.
B→
580
Il prodotto scalare (o prodotto interno) s di due vettori A e B è il prodotto dei moduli dei due
vettori moltiplicato per il coseno dell’angolo a da essi formato:
s = A ⋅ B = A ⋅ B ⋅ cosα
Il prodotto scalare di due vettori è un numero.
Geometricamente, il prodotto scalare di due vettori è dato dal prodotto del modulo del primo moltiplicato per il modulo della proiezione del secondo sul primo.
—— Se a < 90° il prodotto scalare è positivo
—— Se a > 90° il prodotto scalare è negativo
—— Se a = 0°
il prodotto scalare è massimo
—— Se a = 90° il prodotto scalare è nullo
b
0
A
→
Il prodotto vettoriale p tra due vettori A e B si indica con A × B e si legge A esterno B ed è un
vettore che ha:
—— direzione perpendicolare al piano formato dai due vettori;
—— modulo pari all’area del parallelogramma definito dai due vettori;
—— verso definito dalla regola della mano destra (indice = primo vettore; medio = secondo vettore; pollice = risultato) o della vite destrorsa.
4 Cinematica
La cinematica è quella parte della Fisica che studia i moti dei corpi descrivendo come essi avvengono.
Le leggi della cinematica, quidi, non spiegano perché i corpi si muovono (tale aspetto dello studio
del movimento è svolto dalla dinamica).
• Termini della cinematica
Iniziamo ad analizzare alcuni termini della cinematica che saranno applicati ai diversi tipi di moto.
—— Corpo materiale è un qualsiasi oggetto contenente materia.
—— Punto materiale è utilizzato in cinematica per semplificare i concetti relativi al moto in modo
da non descrivere le dimensioni del corpo che compie il moto.
—— Traiettoria è la linea che unisce le successive posizioni acquisite dal punto materiale.
—— Spazio percorso (s) è la lunghezza della traiettoria.
—— Velocità media è il rapporto fra lo spazio Ds percorso da un punto materiale in un intervallo di
tempo Dt e questo stesso intervallo di tempo:
Δs
vm =
Δt
Dimensionalmente: [ v ] = ⎡⎣lt −1 ⎤⎦ = m / s.
Parte I
Fisica
Libro X
Discipline scientifiche
—— Velocità istantanea è la velocità media del punto materiale relativa ad un intervallo di tempo
piccolissimo, al limite tendente a zero:
Δs
t≅0
vm =
Δt
—— Accelerazione media è il rapporto fra la variazione di velocità nell’intervallo di tempo Dt e
questo stesso intervallo di tempo:
Δv
am =
Δt
−1
v ] ⎡⎣lt ⎤⎦
[
Dimensionalmente: [ a ] =
=
= ⎡lt −2 ⎤ = m / s 2 .
[t ] [t ] ⎣ ⎦
—— Accelerazione istantanea è l’accelerazione media relativa ad un intervallo di tempo piccolissimo, al limite tendente a zero:
Δv
t≅0
am =
Δt
• Il moto
Il moto può essere:
—— rettilineo: se la traiettoria del moto è una linea retta;
—— circolare: se la traiettoria del moto è una circonferenza;
—— curvilineo: se la traiettoria del moto è una curva.
• Moto rettilineo uniforme
Un punto materiale si muove di
moto rettilineo uniforme quando
percorre una linea retta con velocità costante.
L’accelerazione è nulla.
Nel moto uniforme la velocità media
coincide con la velocità istantanea
ed è costante.
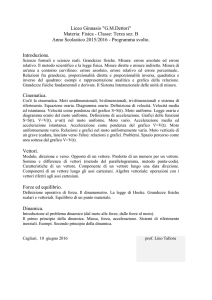
Il grafico velocità-tempo di un moto
rettilineo uniforme è rappresentato
in figura.
• Moto rettilineo uniformemente
accelerato
Un punto materiale si muove di moto
uniformemente accelerato/decelerato se la sua accelerazione a è costante.
v
s
v1
v2
v0
v3
Δt
t
(a)
(b)
Grafici velocità-tempo (a) e spazio-tempo (per differenti velocità)
(b) nel moto rettilineo uniforme
s
1
s = —at 2
2
v
v = at
a > 0 il moto è uniformemente accelerato
a < 0 il moto è uniformemente decelerato
L’accelerazione media coincide con
l’accelerazione istantanea.
La velocità media non coincide con
la velocità istantanea.
t
t
(a)
t
(b)
Grafici spazio-tempo (a) e velocità-tempo (b) nel moto uniformemente accelerato
581
Capitolo Unico
Fisica
Lo spazio percorso è direttamente proporzionale al quadrato del tempo impiegato a percorrerlo:
s=
1 2
at
2
• Caduta dei gravi
582
Tutti i corpi soggetti al campo gravitazionale terrestre cadono con accelerazione costante g detta accelerazione di gravità.
Alla nostra latitudine g ≅ 9,8m / s 2 .
Quindi il moto di un corpo in caduta libera è uniformemente accelerato con accelerazione g se il
corpo è lasciato cadere all’istante t0 = 0 e se la velocità iniziale del corpo è nulla, le equazioni del
moto sono:
s=
gt 2
; v = gt
2
• Moto curvilineo
Lo spostamento, la velocità e l’accelerazione di un punto materiale sono dei vettori e quindi definiti da una lunghezza, da una direzione e da un verso.
Nel moto curvilineo, il moto avviene su una traiettoria curvilinea in cui lo spostamento, la velocità e l’accelerazione variano sia in modulo sia in direzione.
La velocità media è rappresentata dal vettore:
Δr
vm =
Δt
parallelo al vettore posizione.
La velocità istantanea è data da:
Δr dr
=
v = lim vm = lim
Δt→0 Δt
dt
Δt→0
Il vettore velocità è, in ogni istante, tangente alla traiettoria.
Quindi, da istante a istante, essa varierà sia in modulo sia in direzione.
L’accelerazione è definita come la variazione del vettore velocità nel tempo.
Nel moto curvilineo la velocità può variare sia in direzione sia in modulo e quindi l’accelerazione
dovrà tener conto di entrambe queste variazioni. Quindi sarà del tipo a = a1 + a2 , dove:
—— a1 è l’accelerazione legata alla variazione di velocità in modulo detta accelerazione tangenziale;
—— a2 è l’accelerazione legata alla variazione di velocità in direzione detta accelerazione normale.
La differenza di velocità è un vettore diretto sempre verso la concavità della curva.
L’accelerazione media è definita da:
Δv
am =
Δt
ed è un vettore parallelo a Δv .
L’accelerazione istantanea è definita da:
Δv
dv
= lim
a=
dt Δt→0 Δt
Parte I
Fisica
Libro X
Discipline scientifiche
• Moto circolare uniforme
Consideriamo il caso particolare in cui un punto materiale percorre una circonferenza con velocità costante.
Supponiamo che il punto occupi, all’istante t = 0, la posizione P0. Dopo aver percorso un giro completo il corpo si troverà di nuovo in P0.
• Periodo T
Il periodo T è l’intervallo di tempo impiegato dal punto per compiere un giro
→
v
completo. L’unità di misura, essendo un tempo, è il secondo:
R
P0
φ
[T] = [t]
0
• Frequenza n
La frequenza n è il numero di giri compiuti dal punto nell’unità di tempo.
L’unità di misura è l’Hertz (simbolo Hz).
Se all’istante iniziale la parDimensionalmente si ha che:
ticella si trova nel punto P0,
dopo un periodo T la particel[n] = [t –1]
la avrà percorso l’intera cirDalle due definizioni segue che:
conferenza di perimetro P =
1
2pR ritornando nel punto P0
T=
ν
• Velocità tangenziale e velocità angolare
Un punto materiale che percorre una circonferenza di raggio R con periodo T possiede sia una velocità tangenziale che una velocità angolare.
La velocità tangenziale è la velocità con cui la particella percorre la circonferenza. Essa è pari a:
2π R
v=
= 2π Rν
T
La velocità angolare è la velocità con cui viene spazzato l’angolo al centro della circonferenza.
Per il moto circolare uniforme di periodo T essa è data da:
2π
ω=
T
La relazione che lega la velocità tangenziale alla velocità angolare è:
v = wR
• Accelerazione centripeta
È l’accelerazione verso il centro cui è soggetto un punto materiale nel suo moto circolare; in simboli:
ac =
• Moto armonico
Dal punto di vista della cinematica
possiamo definire il moto armonico
come il moto della proiezio­ne di un
punto che percorre una circonferenza.
In figura a è mostrato il punto Q,
proiezione sull’asse delle x del punto P.
In figura b è mostrato come, mentre il
punto P descrive la circonferenza, il
punto Q oscilla tra i punti A e B.
v2
= ω2R
R
y
y
P6
P
0
Q
C
P4 P3
P2
P7
φ
A
P5
B
x
P1
P8 Q8 Q7 Q6 Q5 Q4 Q3 Q2 Q1
Q9 Q10 Q11 Q12 Q13 Q14 Q15 A
B
P9
P0 ≡ P16
Q0 ≡Q16
x
P15
P10
P11
P12 P13
P14
D
(a)
(b)
Grafici del moto armonico
583
Capitolo Unico
Fisica
Si definiscono:
—— Centro di oscillazione: il centro della circonferenza.
—— Ampiezza: la massima distanza del punto Q dal centro di oscillazione.
—— Oscillazione completa: il moto da A a B e ritorno in A.
—— Elongazione: la distanza di Q dal centro di oscillazione in un generico istante t.
—— Periodo: il più piccolo intervallo di tempo dopo il quale il moto assume le stesse caratteristiche. In figura b si mostra che, mentre P percorre l’intera circonferenza, il punto Q descrive
un’oscillazione completa.
—— Pulsazione: è la velocità angolare del moto circolare uniforme.
584
• Moto circolare uniformemente accelerato Il moto circolare è detto uniformemente accelerato quando il punto materiale percorre la circonferenza con accelerazione costante.
In questo caso né la velocità tangenziale né quella angolare della particella sono costanti.
È quindi necessario introdurre una nuova accelerazione a, detta accelerazione angolare, definita
come la variazione della velocità angolare nel tempo:
α=
Δω
Δt
5 Dinamica
• Le forze
Se la cinematica studia il moto di un corpo senza individuarne le cause, la dinamica studia il perché un corpo si muove in un determinato modo.
Lo studio della dinamica è, essenzialmente, l’analisi della relazione tra le forze applicate ad un
corpo e la variazione del suo stato di quiete o di moto.
Intuitivamente, intendiamo con il termine forza un’azione che un corpo esercita su un altro; in Fisica, però, una grandezza è definita solo quando è stabilito il metodo di misurazione ed una unità di misura. A questo scopo si suddividono le forze in due tipi secondo gli effetti che esse possono produrre sui corpi:
—— la forza agente sul corpo lo deforma (cioè il corpo modifica la sua forma);
—— la forza agente sul corpo ne causa il moto se esso è in quiete oppure ne varia la velocità se il
corpo è già in moto.
Nel primo caso si parla di forze statiche; nel secondo caso di forze dinamiche.
Le deformazioni che un corpo può subire si distinguono in due classi:
—— deformazioni elastiche se il corpo riassume la forma iniziale quando su di esso non agisce più
la forza che ne ha provocato la deformazione;
—— deformazioni anelastiche se il corpo resta deformato anche dopo che la forza che ne ha provocato la deformazione non agisce più su di esso.
Un corpo che si deforma elasticamente si dice elastico. Per i corpi elastici vale la seguente legge
di Hooke:
«la deformazione di un corpo elastico è direttamente proporzionale alla forza che la provoca».
In formula matematica la legge è:
F = kd
Parte I
Fisica
Libro X
Discipline scientifiche
in cui F è la forza che provoca la deformazione, d è la deformazione del corpo e k è una costante
caratteristica del corpo.
Una molla elastica può essere utilizzata per realizzare uno strumento di misura delle forze; tale strumento si chiama dinamometro. Quando alla molla viene applicata una forza essa si allunga; l’allungamento è proporzionale all’intensità della forza applicata. Per leggere il valore della forza incognita è necessario che sia stata fissata una scala graduata di lettura, cioè un’unità di misura della forza.
Le forze sono grandezze vettoriali; esse quindi si rappresentano con un vettore e si indicano con F .
Il simbolo F indica solo il modulo (o intensità) della forza, cioè la sua misura.
• Primo principio della dinamica (principio d’inerzia)
Il primo principio della dinamica (o principio d’inerzia o di Galileo) afferma che un corpo mantiene il suo stato di quiete o di moto uniforme se non interviene una forza esterna a modificarlo.
Tale principio è anche detto principio di inerzia in quanto l’inerzia è proprio la tendenza di un
corpo a mantenere lo stato di quiete o di moto in cui si trova. In assenza di forze, dunque, un corpo
si muove di moto rettilineo uniforme. Il corpo a cui fa riferimento il principio d’inerzia è un corpo libero non soggetto a forza. In realtà tutti i corpi interagiscono con i corpi circostanti e quindi
un tale corpo non esiste.
• Secondo principio della dinamica (legge di Newton)
Il secondo principio della dinamica (o legge di Newton) afferma che l’accelerazione acquisita da
un corpo in seguito all’azione di una forza su di esso è direttamente proporzionale alla forza applicata e inversamente proporzionale alla massa m del corpo cioè:
F = ma
• La massa inerziale
Dal principio di Newton deriva quindi la definizione di massa inerziale:
F
m=
a
La massa inerziale rappresenta il rapporto, costante per un determinato corpo, fra una qualsiasi forza che agisca su di esso e l’accelerazione ad esso impressa. Essa indica la tendenza di un corpo a
mantenere lo stato di moto in cui si trova.
La massa inerziale è una grandezza scalare, non è legata alle caratteristiche chimiche e morfologiche di
un corpo, ha per unità di misura il chilogrammo massa.
L’unità di misura della forza è il Newton (N).
1N è la forza necessaria per imprimere ad un corpo di massa pari a 1Kg un’accelerazione di 1m/s2.
• L’equazione di Newton: F = ma
Da questa equazione possiamo notare che la forza è un vettore che ha la stessa direzione e lo stesso verso dell’accelerazione.
Possiamo scomporre questa equazione lungo gli assi cartesiani:
Fx = max; Fy = may; Fz = maz
da cui possiamo notare che ogni componente dell’accelerazione è determinata solo dalla componente della forza lungo quell’asse.
585
Capitolo Unico
Fisica
• Il peso di un corpo
Se si solleva una pietra e la si lascia andare, essa cade a terra.
La Terra attrae tutti i corpi che si trovano in prossimità della sua superficie con una forza:
P
= mg
dove g è l’accelerazione di gravità ed è pari a 9,8 m/s2.
Tale forza è il peso stesso del corpo.
• Terzo principio della dinamica
586
→
F 12
P1
Il terzo principio della dinamica afferma che, quando due corpi interagiscono, le forze esercitate
da un corpo sull’altro sono uguali in modulo e direzione ma hanno verso opposto.
Se consideriamo due corpi P1 e P2 e indichiamo con F12 la forza che P1 esercita su P2 e con F21 la
forza che P2 esercita su P1 si ha che:
F12 = − F21
→ →
→
F 12F 21
F 21
In parole più semplici, il terzo principio della dinamica afferma che
P2
P1
P2
ad ogni azione corrisponde una reazione uguale e contraria e per questo è anche chiamato principio di azione-reazione.
• Moto di un corpo su un piano inclinato
→
R
→
P
Studiamo ora il moto di un corpo di massa m che scivola su un piano inclinato di lunghezza l e altezza h nell’ipotesi che l’attrito sia
trascurabile.
P
Le forze che agiscono
sul
corpo
sono
la
sua
forza
peso
e la reazione
vincolare del piano R .
Per la seconda legge della dinamica dovrà essere:
P + R = ma
• Il pendolo
Un pendolo è costituito da un corpo di massa m sospeso, tramite un filo, a un vincolo intorno al
quale il corpo può ruotare.
Per il moto pendolare valgono le seguenti leggi:
—— quando l’ampiezza delle oscillazioni è piccola le oscillazioni sono isocrone: il periodo T del
moto pendolare non dipende dall’angolo a;
—— il piano in cui la massa m del pendolo oscilla è sempre lo stesso;
—— il periodo del pendolo non dipende dalla massa del corpo oscillante;
—— il periodo del pendolo è direttamente proporzionale alla radice quadrata della lunghezza l del filo
a cui è sospesa la massa oscillante ed inversamente proporzionale alla radice quadrata dell’accelerazione di gravità g, secondo la formula:
l
T = 2π
g
Il pendolo può essere utilizzato per misurare l’accelerazione di gravità g. Si ha, infatti, la formula inversa:
g=
4π 2 l
T2