Cap.5
Cap.5: Statica
La statica è il ramo della meccanica che studia le condizioni che permettono ad un corpo di
rimanere in quiete (cioè fermo rispetto al sistema di riferimento).
L'esperienza indica che il moto di un corpo è determinato dalle interazioni con altri corpi, e quindi
dalle forze esercitate da altri corpi su di esso. Indica anche che la traslazione causata da una forza
può essere bloccata applicando una forza opposta; o che la rotazione generata da un momento può
essere bloccata con un momento opposto. L'esperienza quindi suggerisce che le condizioni che
assicurano lo stato di quiete riguarderanno la forza risultante dalla somma di tutte le forze che
agiscono sul corpo, FR, ed il momento risultante dalla somma di tutti i momenti che agiscono sul
corpo, MR.
F2
Fi
FR= F1+ F2+…+ FN
MR= M1+ M2+…+ MN
F1
FN
Si è visto che un corpo rigido non si muove se sono verificate entrambe queste condizioni:
Condizioni di equilibrio per un corpo rigido
1) La forza risultante dalla somma
di tutte le forze applicate al corpo deve essere nulla:
FR=0
2) Il momento risultante di tutte le forze applicate al corpo,
calcolato rispetto ad un punto qualsiasi, deve essere nullo:
MR=0
Se non fosse vera la 1a condizione, la forza risultante farebbe traslare il corpo.
Se non fosse vera la 2a condizione, il momento risultante farebbe ruotare il corpo.
Nota: le due condizioni di equilibrio riguardano vettori, e quindi devono essere vere per tutte e 3 le
⎡ FRX ⎤ ⎡0 ⎤
componenti dei due vettori (Æ 6 condizioni). Ad esempio FR=0 vuol dire ⎢⎢ FRY ⎥⎥ = ⎢⎢0 ⎥⎥ .
⎢⎣ FRZ ⎥⎦ ⎢⎣0 ⎥⎦
Però se si trattano solo casi in cui le forze appartengono al piano X-Y, allora FRZ=0, ed inoltre il
momento MR può solo avere la componente Z diversa da zero, essendo MRX=MRY=0.
Cap.5
In questo caso le due condizioni di equilibrio si riducono al seguente sistema di sole 3 equazioni:
⎧ FRX = 0
⎪
⎨ FRY = 0
⎪M = 0
⎩ RZ
Esempio 1: il cubo in figura ha massa m=1 [kg] e si trova nello spazio completamente isolato da qualsiasi
altro corpo. E’ in equilibrio?
Il cubo non interagisce con altri corpi. Quindi non è soggetto a forze. La forza risultante dalla
somma di tutte le forze che agiscono sul corpo, FR , è allora ovviamente uguale a 0, come il
momento risultante dalla somma di tutti i momenti, MR. Pertanto sono soddisfatte le due
condizioni di equilibrio: FR=0 e MR=0
Esempio 2: il cubo ora si trova in aria ad 1 metro dalla superficie terrestre. E’ in equilibrio?
Ora il cubo interagisce con la massa della Terra ed è soggetto quindi alla forza peso P pari a
mg. FR=P>0 La prima condizione non è verificata ed il corpo non è quindi in equilibrio (in
pratica, sta per cadere a terra).
P
Esempio 3: state sostenendo il cubo con un dito infilato nell'anello della faccia superiore. Che forza esercita
il dito?
Sostenendolo col dito, il cubo rimane in quiete. Quindi il cubo è in equilibrio.
Deve allora essere verificata la prima condizione: FR=0.
Il cubo è soggetto a 2 forze: il peso P e la forza esercitata dal dito FD. Quindi:
FR=P+FD
0=P+FD
cioè
FD=-P
FD
P
Esempio 4: ora avete posato il cubo sul tavolo. Quali forze agiscono sul cubo?
Anche in questo caso il cubo è in
equilibrio. Quindi la somma delle
forze che su esso agiscono è nulla.
Una forza è il peso P; un’altra forza
è la reazione RT esercitata dalle
molecole del piano di appoggio.
Infatti le forze di legame tra
molecole si oppongono al passaggio
del cubo attraverso il piano. Esse
"bloccano" il cubo esercitando
complessivamente la forza RT.
Siccome FR=P+RT=0, si ha che RT=
-P
P
RT
Cap.5
Esempio 5: Ora tenete il cubo su di un asse di peso PA in equilibrio sulla testa. Quali forze agiscono sul
cubo? Quali sull'asse? Quale peso grava sulla testa?
Separiamo idealmente il cubo dagli altri corpi: su di esso agisce il proprio peso P e la reazione dell'asse RA,
uguale e contraria a P.
P
RA=-P
Isoliamo ora l'asse: su di essa agisce il proprio peso PA, ma anche il peso del cubo P sulla faccia superiore, e
la reazione della testa RT sulla faccia inferiore. Poiché il tutto è in equilibrio, risulta RT=-P-PA.
P
PA
RT=-P-PA
Infine sulla testa grava il peso del cubo ed il peso dell'asse.
P+PA
Cap.5
Esempio 6. Ora spostate il cubo verso l'estremità dell'asse. L'asse è in equilibrio?
Evidenziamo l’asse e le forze che agiscono su di essa:
P
o
PA
RT
Per verificare se l’asse è in equilibrio, controlliamo se è vera la 2a condizione.
Indichiamo con L la lunghezza dell'asse e calcoliamo i momenti di tutte le forze rispetto al punto “o”, punto
di contatto con la testa. Abbiamo che:
MPA=|PA|x0;
MRT=| RT | x0;
MP=-|P|xL/2
MR= MPA+MR+MP =
=0+0- |P|xL/2=
=-mgL/2<0
Quindi MR<0 e non è soddisfatta la seconda condizione di equilibrio. L'asse ruoterà in senso orario, cadendo.
Cap.5
Esempio 7: il piano d’appoggio
Un carico di tegole pesa P Newton. Esso è appoggiato su di un’asse sostenuta da due mattoni messi
di taglio in verticale che fungono da gambe. La distanza tra le due gambe è di L metri. Il carico di
tegole si trova alla distanza di “x” metri da una delle gambe. Trovare i carichi sulle due gambe.
La situazione è rappresentabile così:
Identifichiamo nell’asse il corpo rigido su cui applicare le condizioni di equilibrio.
L’asse interagisce con le tegole su di essa appoggiati: sostituiamole con la loro forza peso
complessiva, P. Dal momento che il peso è diretto verticalmente verso il basso, avrà la sola
componente Y, che indichiamo con –P.
L’asse interagisce anche con due vincoli: le gambe costituite dai mattoni messi di taglio. Li
sostituiremo anch’essi con due forze, N1 e N2, dirette verticalmente. Sappiamo che le due forze N1
ed N2 sono dirette verticalmente perché i due mattoni su cui è appoggiata l’asse non possono
reggere uno sforzo laterale. Lo schema diventa quindi il seguente:
In questo schema le componenti verticali N1 ed N2 sono incognite.
Conviene scrivere dapprima l’equilibrio dei momenti rispetto ad una gamba: così non comparirà
una delle incognite.
Calcolando i momenti rispetto alla gamba sinistra abbiamo: 0-xP+LN2=0
Otteniamo subito la reazione della seconda gamba:
N2=P (x/L)
Cap.5
Scriviamo l’equazione di equilibrio delle forze:
N1+N2-P=0
N1=P-N2
Sostituendo il valore ottenuto per N2:
N1= P (L-x)/L
Il sostegno più caricato è quello più vicino al peso P.
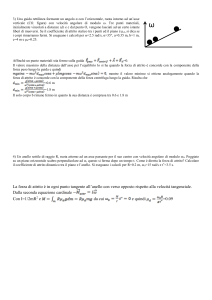
L’andamento delle reazioni vincolari delle due gambe al variare della posizione x del peso è il
seguente:
P
N1
N2
0
L/2
L
x
Cosa sarebbe successo se le tegole si fossero trovate al di là della seconda gamba (x>L)?
P
N1
A questo punto poiché x>L allora
è maggiore di P. Ne consegue che
è minore di zero.
Quindi la reazione è negativa!
N2
N2=P (x/L)
N1=P-N2
Questo vuol dire che la gamba “1” “tira” la trave verso il basso, invece di spingerla verso l’alto. Ma
questo è possibile solo se la trave fosse inchiodata al vincolo. Essendo solo “appoggiata” il vincolo
non è in grado di esercitare una reazione diretta verso il basso: NON E’ QUINDI POSSIBILE
ASSICURARE LA CONDIZIONE DI EQUILIBRIO. Il risultato finale è che la trave si ribalta
(come facilmente intuibile).
Questo è un risultato molto generale. Infatti:
Se un corpo si appoggia su sostegni (o gambe), rimane in equilibrio solo se la forza peso cade
internamente alla base definita dal poligono convesso delimitato dai sostegni.
Se ciò non accadesse, almeno una gamba dovrebbe tirare il corpo (forza vincolare negativa) per
contrastare il momento del peso. Ma questo non è possibile se il corpo è semplicemente appoggiato
sulle gambe.
Cap.5
Il tavolo ha perso una gamba. Il tavolo non si ribalta se appoggiamo il vaso in modo che il peso del
vaso “cada” all’interno del triangolo definito dalle tre gambe (disegno di sinistra).
Nota: L’esercizio 7 (piano di appoggio), può essere definito e risolto anche in maniera inversa: date
le reazioni N1 ed N2 misurate sulle due gambe (ad esempio con due bilance), si può trovare il peso P
e la sua posizione x.
Questo tipo di calcolo viene sfruttato in un dispositivo
biomeccanico: la pedana stabilometrica.
Immaginiamo che una persona appoggi coi due piedi sugli
appoggi “1” e “2”: misurando i carichi N1 ed N2 si ottiene il peso
del soggetto (P=N1+N2) e la posizione orizzontale x del peso
rispetto ad uno dei due piedi. Se il soggetto è asimmetrico (ad
esempio a causa di una postura errata, o di una scoliosi) avremo
che N1 ≠ N2. Se invece che su di un asse, il soggetto ponesse i
piedi su di una pedana appoggiata a tre punti non allineati di cui si
misurano i carichi N1, N2 ed N3, sarebbe possibile ottenere non
solo il peso P (=N1+N2+N3) e la posizione x del carico, ma anche la posizione y. In altre parole si
determina la proiezione sul pavimento del baricentro del soggetto. La posizione (x,y) è ottenibile
anche misurando oltre ad N1 ed N2, un momento torcente M.
Queste pedane possono essere utilizzate per valutare il funzionamento del controllo posturale in un
soggetto.
Cap.5
Baricentro.
Abbiamo indicato il peso di un corpo puntiforme di massa m con il vettore P =mg applicato nel
punto dove si trova il corpo. Nei problemi precedenti abbiamo descritto la forza peso di un corpo
esteso, NON puntiforme, nello stesso modo, e cioè semplicemente con un vettore peso P =mg,
applicato in un certo punto del corpo.
In effetti questo è possibile perché possiamo scomporre un
corpo esteso di massa m in tanti piccoli “corpuscoli”
sufficientemente minuscoli da ritenerli puntiformi.
La massa di questi N corpuscoli sarà rispettivamente Δm1,
Δm2,…,ΔmN.
Ognuno di questi corpuscoli puntiformi peserà:
pi=Δmig,
ed essendo i vettori pi tutti paralleli tra loro, la somma di tutti i
pesi è proprio il vettore
P= Δm1g+Δm2g+…ΔmNg=
= (Δm1+Δm2+…ΔmN) g =
=mg.
Questo vettore risultante sarà applicato in un punto ben determinato: questo punto è detto
baricentro o centro di gravità del corpo.
Determinare la posizione del baricentro è semplice se il corpo ha massa omogenea e forma
simmetrica (sfera, cubo, cilindro…): in tal caso il baricentro è il centro geometrico del corpo. Per
ottenere il baricentro di un corpo disomogeneo e di forma qualsiasi possiamo avvalerci di questa
proprietà:
il momento rispetto ad un punto P qualsiasi del peso di un corpo esteso (non puntiforme)
è uguale al momento di un corpo puntiforme di uguale peso posto nel baricentro.
}
}
P
=
P
Cap.5
Esempio: determinazione del baricentro di un corpo. Un’asse (di peso trascurabile) lunga L metri
sostiene 4 casse ognuna di peso P disposte come in figura. Determinare il baricentro del corpo
costituito dall’asse e dalle 4 casse.
0
X
Indichiamo con X la posizione, per ora incognita, del baricentro.
Il peso totale del corpo da studiare è 4P. Per definizione di baricentro, il momento (rispetto ad un
punto qualsiasi) del peso di un corpo puntiforme che abbia lo stesso peso totale del corpo esteso (in
questo esempio, 4P) e che sia posto nel baricentro del corpo esteso, X, è uguale al momento
prodotto dal peso del corpo in esame.
0
X
4P
Il momento di questo ipotetico corpo puntiforme rispetto all’origine 0, MC, è:
MC=-4PX.
Sempre rispetto all’origine, il momento del peso del corpo esteso, ME, è uguale alla somma dei
momenti prodotti dai pesi delle 4 casse:
ME =0xP-(L/2)P-L(2P)
Uguagliando i due momenti, otteniamo :
-4PX =-(L/2)P-L(2P)
cioè
X=(5/8)L
Cap.5
Leve
La leva è una macchina semplice costituita da una asta rigida incernierata ad un fulcro. La parte
dell’asta che unisce il fulcro ad ognuna delle due forze si chiama braccio (la leva ha quindi due
bracci). Con la leva è possibile applicare una forza di modulo FA ed equilibrare un carico FC ≠ FA. Il
Guadagno Meccanico G è il rapporto tra carico e forza applicata: G=FC/FA.
Ad esempio, un guadagno G>1 indica che la leva permette di equilibrare un dato carico applicando
una forza di intensità inferiore.
Per studiare una leva, è necessario:
1) isolare la sbarra dagli altri corpi;
2) evidenziare le forze applicate (queste sono la forza applicata FA e il carico FC, oltre alla
reazione vincolare del fulcro R);
FC
FA
R
3) calcolare il momento risultante rispetto al fulcro (notare che per questo calcolo non è
necessario conoscere il valore di R, dato che il momento di R rispetto al fulcro è sempre 0!)
Imponendo che la somma di tutti i momenti rispetto al fulcro sia =0, troviamo la condizione di
equilibrio, quando cioè la forza applicata equilibra il carico. Da questa condizione, si ricava il
guadagno G.
Le leve si differenziano in tre tipi a seconda della posizione del fulcro e delle forze FA e FC.
Cap.5
Leva di Primo Tipo
←Xc →←------
Xa --------- →
FC
FA
Se la leva è in equilibrio, la somma dei
momenti rispetto al fulcro è nulla:
MR=FCXC-FAXA=0
Æ FC/FA=XA/XC
Quindi
G = XA/XC
Il guadagno sarà > o < 1 a seconda della
lunghezza dei bracci XA e XC.
Leva di Secondo Tipo
FC
←Xc →
←---------- Xa --------------→
FA
Uguagliando a 0 la somma dei momenti
rispetto al fulcro otteniamo ancora che:
G=XA/XC
In questo caso G è sempre >1
Leva di Terzo Tipo
←Xa →
FA
←------------
FC
Xc -----------→
G=XA/XC
In questo caso G è sempre <1. Questo tipo di
leva è utile per regolare con precisione la
forza applicata.
Cap. 5
Quiz
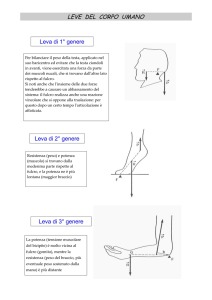
Classificare il tipo di leva. Per i primi due grafici, valutare la forza F esercitata dal muscolo per
equilibrare il carico.
Cap. 5
Forze d’attrito
L’attrito è una forza che si oppone al moto di un corpo. Ma paradossalmente è indispensabile per il
movimento: non si può camminare senza attrito tra suole e strada, e le ruote delle automobili
girerebbero a vuoto senza attrito. L'attrito è dovuto a forze attrattive tra le molecole di due corpi.
Queste forze formano "microsaldature" che impediscono lo scorrimento tra le superfici dei corpi.
L’attrito riguarda non solo i corpi solidi, ma anche liquidi e gas (le forze di attrito di un liquido si
chiamano forze viscose). Esso è generalmente molto minore nei liquidi e nei gas. Per questo si
usano liquidi per “lubrificare” le superfici, cioè per ridurne l’attrito. Il liquido lubrificante aderisce
alle superfici dei corpi creando un piccolo strato a basso attrito.
Per descrivere quantitativamente le forze di attrito, consideriamo un blocco di materiale su di una
superficie.
Sul blocco agiscono solo il peso P e la reazione vincolare della superficie di appoggio N=-P. Le
equazioni di equilibrio sono soddisfatte, e non può esistere oltre a queste due forze anche una forza
di attrito.
P
N
Immaginiamo ora di applicare una forza di trazione T. L’esperienza mostra che il corpo non si
muove se T non è sufficientemente intensa. Deve esiste quindi una forza che si oppone al moto
equilibrando T. Chiamiamo questa forza attrito statico fS.
P
T
fS
N
Se T cresce gradualmente, anche la forza di attrito fS cresce per compensare T, fino ad un certo
valore oltre al quale il corpo comincia a muoversi strisciando. Questo valore limite si chiama forza
di attrito statico massima: fS(max)
Sperimentalmente si è visto che:
1) fS(max) è indipendente dall’area di contatto (per cui se il blocco viene messo in piedi ruotandolo
di 90°, fS(max) non cambia!)
fS(max)
fS(max)
2) Il modulo di fS(max) è proporzionale alla reazione del piano di appoggio N:
|fS(max)|=μS |N|
Cap. 5
Il coefficiente μS è detto coefficiente di attrito statico. Dipende dalla natura delle superfici e
generalmente è minore di 1.
Anche dopo che il corpo si è messo in moto, esiste una forza di attrito che si oppone al moto.
Questa è detta forza di attrito cinetica, o di scorrimento, fK,
Questa forza in modulo vale:
|fK|=μK |N|
Quindi anche fK non dipende dalla ampiezza della superficie di contatto, ma solo dalla forza
normale N. μK è il coefficiente di attrito cinetico: anch’esso dipende dalla natura delle superfici ed è
minore del coefficiente di attrito statico.
μK<μS
Esempio: diagramma indicante la forza di attrito agente su di un corpo che pesa
1000 [N] appoggiato su asfalto, la cui superficie di contatto è ricoperta di gomma, al
variare della intensità della forza trainante T